7. Сети Ethernet/Fast Ethernet/Gigabit Ethernet
Сегодня термин Ethernet стал синонимом стандарта IEEE 802.3, определяющего сеть передачи данных со случайным методом доступа к среде с разрешением конфликтов (коллизий) САМА/CD. Из-за значительной простоты стандарта и, как следствие, низкой стоимости оборудования, Ethernet нашел широкое применение в современных сетях, о чем свидетельствует непрерывный рост инсталляций сетей как на основе стандарта Ethernet, так и на основе Fast Ethernet — эффективного и недорогого преемника Ethernet.
Первоначально стандарт Ethernet разрабатывался компанией Xerox и базировался на системе ALOHA [1]. Это была сеть, использующая протокол CSMA/CD, но скорость передачи составляла всего лишь 2,94 Мбит/с. Сеть объединяла более 100 рабочих станций в пределах одного километра. Сильному дальнейшему развитию способствовала совместная разработка группой из трех компаний Xerox, DEC и Intel улучшенного стандарта Ethernet, обеспечивающеro скорость передачи 10 Мбит/с [2]. Именно этот стандарт стал базой для современного международного стандарта IEEE 802.3.
Претерпели изменения и физические интерфейсы. Так, если на этапе внедрения стан- дарта Ethernet главные интерфейсы базировались на тонком и толстом коаксиальных кабелях, то сейчас предпочтение отдается неэкранированной витой паре 0ТР са1.5 и оптическому волокну. Поскольку современные кабельные структуры сетей носят смешанный характер, то далее будут рассматриваться оба этих современных интерфейса.
Основные этапы эволюции показаны на рис. 7.1. Когда в 1980 году компании Xerox, DEC и Intel опубликовали стандарт DIX' Ethernet, скорость передачи 10 Мбит/с считалась гигантской и достаточной для любых приложений. С тех пор, по мере совершенствования компьютерных технологий, появились потребности в значительно большей полосе пропускания. И сегодня стандарт Ethernet в его оригинальном виде, использующий логическую топологию "шина" с одним коллизионным доменом, остается приемлемым разве что для построения ло- кальных сетей на небольших предприятиях. Первая половина 90-х годов характеризуется вне- дрением и стремительным ростом сетевых коммутаторов Ethernet, позволяющих строить магистрали в точке (collapsed backbones) и, тем самым, сильно разгрузить крупные сети. Дальнейшее появление коммутаторов и сетевых карт, поддерживающих дуплексную передачу— передачу данных в обоих направлениях одновременно без коллизий при логической топологии "точка-точка", — сняло ограничение на расстояние и дало полную свободу применению волоконно-оптических линий связи и построению протяженных сегментов между коммутаторами Ethernet.
В 1995 году принимается стандарт IEEE 802.3u Fast Ethernet, обеспечивающий скорость передачи 100 Мбит/с. На сетевом рынке появляется множество новых продуктов: от повторителей Fast Ethernet до сетевых карт и коммутаторов, поддерживающих скорости 10/100 Мбит/с и дуплексные режимы по всем портам. И, наконец, появляются спецификации стандарта Gigabit Ethernet IEEE 802.3z и IEEE 802.3ab.
В силу специфики излагаемого материала, большое внимание уделяется волоконно-оптическому интерфейсу, тем более, что с ростом скорости передачи (по мере перехода на Fast Ethernet и Gigabit Ethernet) и с увеличением протяженности сегментов (до величин от нескольких до нескольких десятков километров) приемлемые альтернативные решения отсутствуют.
При строительстве сети главную практическую ценность
обычно имеют инструкции, правила, которых следует придерживаться для
нормального функционирования сети, например: длины сегментов, диаметр
коллизионного домена, количество рабочих станций в сети, и т.п. Однако сами по
себе такие инструкции трудно воспринимать, если не иметь представления о
стандарте, который, собственно, является первопричиной появления правил и
инструкций. Поэтому вначале рассматриваются основные спецификации стандарта
Ethernet. Описание более современных стандартов Fast Ethernet и Gigabit
Ethernet строится на основе рассмотрения отличительных черт и модернизаций,
преимуществ и недостатков по сравнению с предшественником. В завершении главы
приведены примеры конфигураций сетей по мере роста от Ethernet до Gigabit
Ethernet, а также краткие характеристики некоторых новых протоколов, в
частности 802.3х, 802.1Q, RSVP, вооружившись которыми Gigabit Ethernet
становится полноправной магистральной волоконно-оптической технологией. 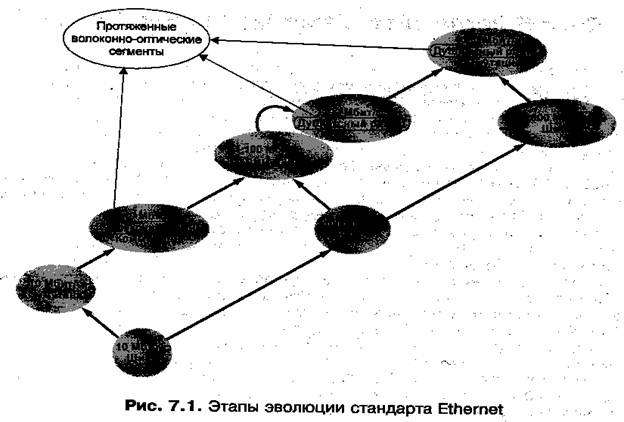
Выделим три главных элемента стандарта: формат кадра, систему сигнализации между рабочими станциями при осуществлении передачи данных по протоколу CSMA/CD и набор физических сред: коаксиальный кабель, витая пара, волоконно-оптический кабель [3].
Формат кадра Ethernet
На рис. 7.2 показан формат кадра Ethernet. Поля имеют следующие назначения: Преамбула: 7 байт, каждый из которых представляет чередование единиц и нулей 10101010. Преамбула позволяет установить битовую синхронизацию на приемной стороне.
Ограничитель начала кадра (SFD, start frame delimiter): 1 байт, последовательность 10101011, указывает, что далее последуют информационные поля кадра. Этот байт можно относить к преамбуле.
Адрес назначения (DA, destination address): 6 байт, указывает МАС-адрес станции (МАС- адреса станций), для которой (которых) предназначен этот кадр. Это может быть единственный физический адрес (unicast), групповой адрес (multicast) или широковещательный адрес (broadcast).
Адрес отправителя (SA, source address): 6 байт, указывает МАС-адрес станции, которая посылает кадр.
Поле типа или длины кадра (Т or L, type or length): 2 байта. Существуют два базовых формата кадра Ethernet (в английской терминологии raw formats — сырые форматы)— Ethernet ll и IEEE 802.3 (рис. 7.2), причем различное назначение у них имеет именно рассматриваемое поле. Для кадра Ethernet II в этом поле содержится информация о типе кадра. Ниже приведены значения в шестнадцатеричной системе этого поля для некоторых распространенных сетевых протоколов: Ох0800 для IP, Ох0806 для ARP, Ох809В для AppleTalk, Ох0600 для XNS, и Ох8137 для IPX/SPX. С указанием в этом поле конкретного значения (одного из перечисленных) кадр приобретает реальный формат, и в таком формате кадр уже может распространяться по сети.
Для кадра IEEE 802.3 в этом поле содержится выраженный в байтах размер следующего поля — поля данных (LLC Data). Если эта цифра приводит к общей длине кадра меньше 64 байт, то за полем LLC Data добавляется поле Pad. Для протокола более высокого уровня не возникает путаницы с определением типа кадра, так как для кадра IEEE 802.3 значение этого поля не может быть больше 1500 (Ox05DC). Поэтому, в одной сети могут свободно сосуществовать оба формата кадров, более того, один сетевой адаптер может взаимодействовать с обоими типами посредством стека протоколов.
• Данные (LLC Data): поле данных, которое обрабатывается подуровнем LLC. Сам по себе кадр IEEE 802.3 еще не окончательный. В зависимости от значений первых нескольких байт этого поля, могут быть три окончательных формата этого кадра IEEE 802.3:
Ethernet802.3 (не стандартный, в настоящее время устаревающий формат, используемый Novell) — первые два байта LLC Data равны OxFFFF;
Ethernet SNAP (стандартный IEEE 802.2 SNAP формат, которому отдается наибольшее предпочтение в современных сетях, особенно для протокола ТСР/IP) — первый байт LLC Data равен Ох4А;
— Ethernet 802.2 (стандартный IEEE 802.2 формат, используется фирмой Novell в Net- Ware 4.0) — первый байт 0 С Data не равен ни OxFF (11111111), ни ОхАА (10101010).
• Дополнительное поле (pad — наполнитель) — заполняется только в том случае, когда поле данных невелико, с целью удлинения длины кадра до минимального размера 64 байта — преамбула не учитывается. Ограничение снизу на минимальную длину кадра необходимо для правильного разрешения коллизий.
• Контрольная последовательность кадра (FCS,
frame check sequence): 4-байтовое поле, в котором указывается контрольная
сумма, вычисленная с использованием циклического избыточного кода по полям
кадра, за исключением преамбул SDF и FCS. 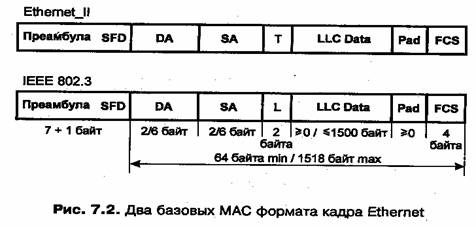
Основные варианты алгоритмов случайного доступа к среде
Протокол САМА/CD определяет характер взаимодействия рабочих станций в сети с единой общей для всех устройств средой передачи данных. Все станции имеют равноправные условия по передаче данных. Нет определенной последовательности, в соответствии с которой станции могут получать доступ к среде для осуществления передачи. Именно в этом смысле доступ к среде осуществляется случайным образом. Реализация алгоритмов случайного доступа представляется значительно более простой задачей, чем реализация алгоритмов детерминированного доступа. Поскольку в последнем случае требуется или специальный протокол, контролирующий работу всех устройств сети (например, протокол обращения маркера, свойственный сетям Token Ring и FDDI), или специальное выделенное устройство— мастер концентратор, который в определенной последовательности предоставлял бы всем остальным станциям возможность передавать (сети Arcnet, 100Ч6 AnyLAN).
Однако сеть со случайным доступом имеет один, пожалуй главный, недостаток — это не совсем устойчивая работа сети при большой загруженности, когда может проходить достаточно большое время, прежде чем данной станции удается передать данные. Виной тому— коллизии, которые возникают между станциями, начавшими передачу одновременно или почти одновременно. При возникновении коллизии передаваемые данные не доходят до получателей, а передающим станциям приходится повторно возобновлять передачу.
Дадим определение: множество всех станций сети, одновременная передача любой пары из которых приводит к коллизии, называется коллизионным доменом (collision domain).
Из-за коллизии (конфликта) могут возникать непредсказуемые задержки при распространении кадров по сети, особенно при большой загруженности сети (много станций пытаются одновременно передавать внутри коллизионного домена, > 20-25), и при большом диаметре коллизионного домена (> 2 км). Поэтому при построении сетей желательно избегать таких экстремальных режимов работы.
Проблема построения протокола, способного наиболее рационально разрешать коллизии, и оптимизирующего работу сети при больших загрузках, была одной из ключевых на этапе формирования стандарта Ethernet IEEE 802.3. Первоначально рассматривались три основных подхода в качестве кандидатов для реализации стандарта случайного доступа к среде (рис. 7.3): непостоянный, 1-постоянный и р-постоянный [5].

Непостоянный (nonpersistent) алгоритм. При этом алгоритме станция, желающая передавать, руководствуется следующими правилами.
1. Прослушивает среду, и, если среда свободна (т.е. если нет другой передачи или нет сигнала коллизии), передает, в противном случае — среда занята — переходит к шагу 2.
2. Если среда занята, ждет случайное (в соответствии с определенной кривой распределения вероятностей) время и возвращается к шагу 1.
Использование случайного значения ожидания при занятой среде уменьшает вероятность образования коллизий. Действительно, предположим в противном случае, что две станции практически одновременно собрались передавать, в то время, как третья уже осуществляет передачу. Если первые две не имели бы случайного времени ожидания перед началом передачи (в случае, если среда оказалась занятой), а только прослушивали среду и ждали, когда она освободится, то после прекращения передачи третьей станцией первые две начали бы передавать одновременно, что неизбежно приводило бы к коллизиям. Таким образом, случайное ожидание устраняет возможность образования таких коллизий. Однако неудобство этого метода проявляется в неэффективном использовании полосы пропускания канала. По- скольку может случиться, что к тому моменту, когда среда освободится, станция, желающая передавать, еще будет продолжать.ожидать некоторое случайное время, прежде чем решится прослушивать среду, поскольку перед этим уже прослушивала среду, которая оказалась занятой. В итоге канал будет простаивать какое-то время, даже если только одна станция ожидает передачи.
1-постоянный (1-persistent) алгоритм. Для сокращения времени, когда среда не занята, мог бы использоваться 1-постоянный алгоритм. При этом алгоритме станция, желающая передавать, руководствуется следующими правилами.
1. Прослушивает среду, и, если среда не занята, передает, в противном случае переходит к шагу 2;
2. Если среда занята, продолжает прослушивать среду до тех пор, пока среда не освободится, и, как только среда освобождается, сразу же начинает передавать.
Сравнивая непостоянный и 1-постоянный алгоритмы, можно сказать, что в 1-постоянном алгоритме станция, желающая передавать, ведет себя более "эгоистично". Поэтому, если две или более станций ожидают передачи (ждут, пока не освободится среда), коллизия, можно сказать, будет гарантирована. После коллизии станции начинают решать, что им делать дальше.
Р-постоянный (р-persistent) алгоритм. Правила этого алгоритма следующие:
Если среда свободна, станция с вероятностью р сразу же начинает передачу или с времени распространения сигнала из конца в конец сети;
2. Если среда занята, станция продолжает прослушивание до тех пор, пока среда не освободится, затем переходит к шагу 1;
Если передача задержана на один интервал Т, станция возвращается к шагу 1.
возникает зффелаьвсконая проблема, как избежать нестабильности при высоких загрузках. Рассмотрим ситуацию, при которой ll станций намерены передать кадры, в то время, как уже идет передача. По окончанию передачи ожидаемое количество станций, которые попытаются передавать, будет равно произведению количества желающих передавать станций на вероятность передачи, то есть пр. Если пр > 1, то в среднем несколько станций будут пытаться передать сразу, что вызовет коллизию. Более того, как только коллизия будет обнаружена, все станции вновь перейдут к шагу 1, что вызовет повторную коллизию. В худшем случае, новые станции, желающие передавать, могут добавиться к п, что еще больше усугубит ситуацию, приведя, в конечном итоге, к непрерывной коллизии и нулевой пропускной способности. Во избежании такой катастрофы пр должно быть меньше единицы. Если же сеть подвержена возникновению состояний, когда много станций одновременно желают передавать, то необходимо уменьшать р. С другой стороны, когда р становиться слишком малым, даже отдельная станция может прождать в среднем (1 — р)/р интервалов Т, прежде чем осуществит передачу. Так если р=0,1, то средний простой, предшествующий передаче, составит 9Т. протокол CSMA/CD
Протокол CSMA/CD [3] воплотил в себе идеи вышеперечисленных алгоритмов и добавил важный элемент — разрешение коллизий. Поскольку коллизия разрушает все передаваемые в момент ее образования кадры, то и нет смысла станциям продолжать дальнейшую передачу своих кадров, коль скоро они (станции) обнаружили коллизии. В противном случае, значительной была бы потеря времени при передаче длинных кадров. Поэтому для своевременного обнаружения коллизии станция прослушивает среду на всем протяжении собственной передачи. Приведем основные правила алгоритма CSMA/CD для передающей станции.
Передача кадра (рис. 7.4 а): Станция, собравшаяся передавать, прослушивает среду, и передает, если среда свободна. В противном случае (т.е. если среда занята), переходит к шагу 2. При передаче нескольких кадров подряд станция выдерживает определенную паузу между посылками кадров — межкадровый интервал, причем после каждой такой паузы перед отправкой следующего кадра станция вновь прослушивает среду (возвращение на начало шага 1);
Если среда занята, станциИ продолжает прослушивать среду до тех пор, пока среда не станет свободной, и затем сразу же начинает передачу;
Каждая станция, ведущая передачу, прослушивает среду, и, в случае обнаружения коллизии, не прекращает сразу же передачу, а сначала передает короткий специальный сигнал коллизии — jam-сигнал, информируя другие станции о коллизии, и прекращает передачу;
После передачи jam-сигнала станция замолкает и ждет некоторое произвольное время в соответствии с правилом бинарной экспоненциальной задержки, а затем возвращается к шагу 1.
Межкадровый интервал IFG (i~nterframe дар) составляет 9,6 мкм (12 байт). С одной стороны, он необходим для того, чтобы принимающая станция могла корректно завершить прием кадра. Кроме этого, если бы станция передавала кадры непрерывно, она бы полностью захватила канал и, тем самым, лишила другие станции возможности передачи.
Jam-сигнал (jamming — дословно глушение). Передача jam-сигнала
гарантирует, что ни один кадр не будет потерян, так как все узлы, которые
передавали кадры до возникновения коллизии, приняв jam-сигнал, прервут свои
передачи и замолкнут в ожидании новой попытки передать кадры. Jam-сигнал должен
быть достаточной длины, чтобы он дошел до самых удаленных станций коллизионного
домена с учетом дополнительной задержки SF (safety margin) на возможных
повторителях. Содержание jam-сигнала не принципиально за исключением того, что
оно не должно соответствовать значению поля CRC частично переданного кадра
(802.3), и первые 62 бита должны представлять чередование 1 и 0 со стартовым
битом 1. 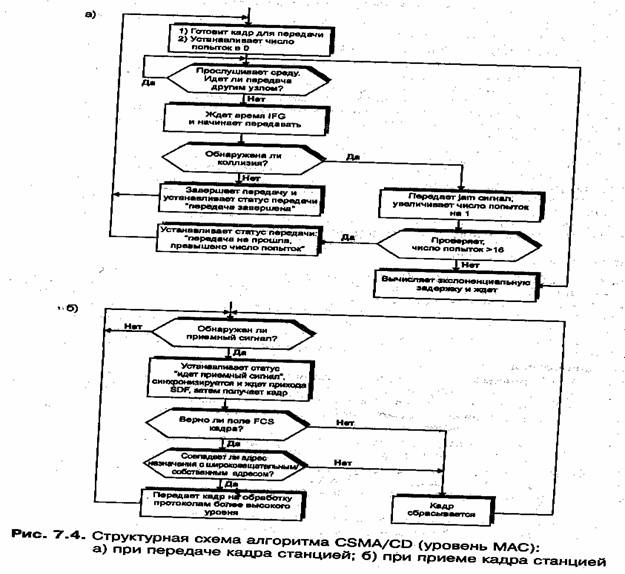
На рис. 7.5 проиллюстрирован процесс обнаружения коллизии применительно к топологии "шина" (на основе тонкого или толстого коаксиального кабеля (стандарты 10Base5 и 10Base2 соответственно).
В момент времени t, узел А (DTE А) начинает передачу, естественно прослушивая свой
же передаваемый сигнал. В момент
времени 1 когда кадр почти дошел до узла В (DTE В), этот узел, не
зная о том, что уже идет передача, сам начинает передавать. В момент времени t,
= t, +Л, узел В обнаруживает коллизию (увеличивается постоянная
составляющей электрического сигнала в прослушиваемой линии). После этого узел В
передает jam-сигнал и прекращает передачу. В момент времени t, сигнал
коллизии доходит до узла А, после чего А также передает
jam-сигнал и прекращает передачу. 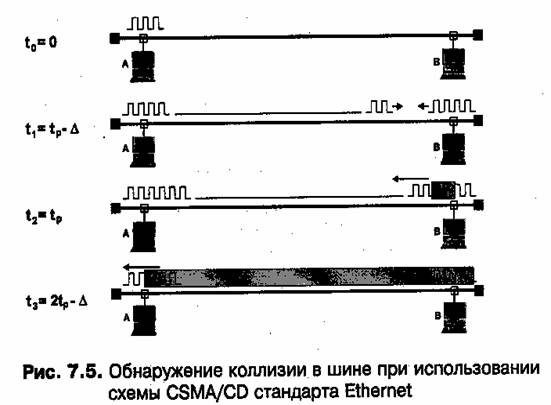
По стандарту Ethernet узел не может передавать очень короткие кадры, или, иными словами, вести очень короткие передачи. Как говорилось при описании формата кадра, даже если поле данных не заполнено до конца, то появляется специальное дополнительное поле, уд- линяющее кадр до минимальной длины 64 байта без учета преамбулы.
Время канала $Т (slot time) — это минимальное время, в течение которого узел обязан вести передачу, занимать канал. Это время соответствует передаче кадра минимального до- пустимого размера, принятого стандартом Ethernet!ЕЕЕ 802.3. Время канала связано с мак- симальным допустимым расстоянием между узлами сети — диаметром коллизионного домена. Допустим, что в приведенном выше примере реализуется наихудший сценарий, когда станции А и В удалены друг от друга на максимальное расстояние. Время распространения сигнала от А до В обозначим через t . Узел А начинает передавать в нулевой момент времени. Узел В начинает передавать в момент времени t, = t — Л и обнаруживает коллизию спустя интервал Л после начала своей передачи. Узел А обнаруживает коллизию в момент времени t, = 2t, — Л. Для того, чтобы кадр, испущенный А, не был потерян, необходимо, чтобы узел А не прекращал вести передачу к этому моменту, так как тогда, обнаружив коллизию, узел А
будет знать, что его кадр не дошел, и попытается передавать его повторно. В противном случае, кадр будет потерян. Максимальное время, спустя которое с момента начала передачи узел А еще может обнаружить коллизию, равно 2t — это время называется задержкой на двойном пробеге RTD (round-trip delay). В более общем случае, RTD определяет суммарную задержку, связанную как с задержкой из-за конечной длины сегментов, так и с задержкой, возникающей при обработке кадров на физическим уровне промежуточных повторителей и оконечных узлов сети. Далее удобно использовать также другую единицу измерения времени: битовое время ВТ (bit time). Время в 1 ВТ соответствует времени, необходимому для передачи одного бита, т.е. 0,1 мкс при скорости 10 Мбит/с.
Стандартом Ethernet регламентированы следующие правила обнаружения коллизии конечным узлом сети [4]:
l. Узел А должен обнаружить коллизию до того, как передаст свой 512-й бит, включая биты преамбулы;
2. Узел А должен прекратить передачу раньше, чем будет передан кадр минимальной дли- ны — передано 576 бит (512 бит после ограничителя начала кадра SFD);
3. Перекрытие между передачами узлов А и В — битовый интервал, начиная с момента передачи первого бита преамбулы узлом А и заканчивая приемом узлом А последнего би- та, испущенного узлом В, — должно быть меньше, чем 575 ВТ.
Последнее условие для сети Ethernet является наиболее важным, поскольку его выпол- нение автоматически влечет выполнение и первых двух. Это третье условие задает ограниче- ние на диаметр сети. Применительно к задержке на двойном пробеге RTD третье условие можно сформулировать в виде: RTD < 575 ВТ.
При передаче больших кадров, например 1500 байт, коллизия, если она вообще возникнет, обнаруживается практически в самом начале передачи, не позднее первых 64 переданных байт (если коллизия не возникла в это время, то позже она уже не возникнет, по- скольку все станции прослушивают линию и, "слыша™ передачу, будут молчать). Так как jam- сигнал значительно короче полного размера кадра, то при использовании алгоритма CSMA/CD количество в холостую израсходованной емкости канала сокращается до времени, требуемого на обнаружение коллизии. Раннее обнаружение коллизий приводит к более эффективному использованию канала. Позднее обнаружение коллизий, свойственное более протяженным сетям, когда диаметр коллизионного домена составляет несколько километров, снижает эффективность работы сети. На основании упрощенной теоретической модели поведения загруженной сети (в предположении большого числа одновременно передающих станций и фиксированной минимальной длины передаваемых кадров у всех станций) можно выразить производительность сети U через отношение
где е — основание натурального логарифма. На производительность сети влияет размер
транслируемых кадров и диаметр сети. Производительность в наихудшем случае (когда RDT = ST) составляет около 37%, а в наилучшем случае (когда RTD много меньше, чем ST) ст
ремится к 1. Хотя формула и выведена в пределе большого числа станций, пытающихся передавать одновременно, она не учитывает особенностей алгоритма усеченной бинарной экспоненциальной задержки, рассмотренного ниже, и не справедлива для сильно перегруженной коллизиями сети, например, когда станций, желающих передавать, становится больше 15.
Усеченная бинарная экспоненциальная задержка. Алгоритм, принятый в стандарте IEEE 802.3 CSMA/CD, наиболее близок к 1-постоянному алгоритму, но отличается дополнительным элементом — усеченной бинарной экспоненциальной задержкой. При возникновении коллизии станция подсчитывает, сколько раз подряд при отправке пакета возникает коллизия. Поскольку повторяющиеся коллизии свидетельствуют о высокой загруженности среды, МАС-узел пытается увеличивать задержку между повторными попытками передачи кадра. Соответствующая процедура увеличения интервалов времени подчиняется правилу усеченной бинарной зкспоненциальной задержки и работает следующим образом.
Количество слотовых времен (интервалов по 51,2 мкс), которое станция ждет перед тем, как совершить N-ую попытку передачи (N — 1 попыток потерпели фиаско из-за возникновения коллизий во время передачи), представляет случайное целое число R с однородной функцией распределения в интервале 0<R <2, где К =min(N,BL), и ВЬ (backoff limit)— установленная стандартом предельная задержка, равная 10. Если число последовательных безуспешных попыток отправить кадр доходит до 16, то есть коллизия возникает 16 раз подряд, то кадр сбрасывается.
Алгоритм CSMA/CD с использованием усеченной бинарной экспоненциальной задержки признан лучшим среди множества алгоритмов случайного доступа и обеспечивает эффективную работу сети как при малых, так и при средних загрузках. При больших загрузках следует отметить два недостатка. Вопервых, при большом числе коллизий станция 1, которая впервые собирается отправить кадр (до этого не пыталась передавать кадры), имеет преимущество перед станцией 2, которая уже несколько раз безуспешно пыталась передать кадр, наты- каясь на коллизии, поскольку станция 2 ожидает значительное время перед последующими попытками в соответствии с правилом бинарной экспоненциальной задержки. Таким образом, может наблюдаться нерегулярность передачи кадров, что нежелательно для зависящих от времени приложений. Во-вторых, при большой загруженности снижается эффективность работы сети в целом. Оценки показывают, что при одновременной передаче 25 станциями общая полоса пропускания снижается примерно в 2 раза [6]. Но число станций в коллизионном домене может быть больше, поскольку далеко не все они одновременно будут обращаться к среде.
Прием кадра (рис. 7.4 б). Принимающая станция или другое сетевое устройство, например концентратор или коммутатор, первым делом синхронизируется по преамбуле и затем преобразовывает манчестерский код в бинарную форму (на физическом уровне). Далее обрабатывается бинарный поток.
На уровне МАС оставшиеся биты преамбулы сбрасываются, а станция читает адрес назначения и сравнивает его со своим собственным. Если адреса совпадают, то поля кадра, за исключением преамбулы, SDF и FCS помещаются в буфер и вычисляется контрольная сумма, которая сравнивается с полем контрольной последовательности кадра FCS (используется метод циклического суммирования CRC-32). Если они равны, то содержимое буфера передается протоколу более высокого уровня. В противном случае кадр сбрасывается. Возникновение коллизии при приеме кадра обнаруживается либо по изменению электрического потенциала (если используется коаксиальный сегмент), либо по факту приема дефектного кадра (неверная контрольная сумма), если используется витая пара или оптическое волокно. В обоих слу- чаях принятая информация сбрасывается.
Основные
функциональные параметры стандарта Ethernet приведены в табл. 7.1. 
Спецификации физического уровня IEEE 802.3 и типы портов
Первоначально в 1985 году, когда был опубликован стандарт IEEE 802.3, использовались только два типа передающей среды: тонкий коаксиальный кабель (диаметр 6 мм)— стандарт физического интерфейса BNC (10Base-2), и толстый коаксиальный кабель (диаметр 13 мм) — стандарт AUI (10Base-5, подключение толстого коаксиального кабеля осуществляется посредством специального трансивера). Позднее появились еще три интерфейса: на витую пару — RJ-45 (10Base-Т), на коаксиальный кабель для широкополосных сетей кабельного телевидения сопротивлением 75 Ом — (10Broad36), и на оптическое многомодовое волокно (пара волокон) — 'соединители ST (10Base-F). Еще позже появился интерфейс на одномодовое оптическое волокно.
Стандарт 108ase-F, в свою очередь, подразделяется еще на три спецификации:
• 10Base-FP — определяет топологию пассивной звезды на основе волоконно-оптических сегментов длиной до 1 км и числом станций до 33. При такой топологии каждый удаленный узел связывается с центральным узлом парой волокон. Сигнал из центрального узла размножается оптическим ответвителем и идет на все удаленные узлы. Сигналы от удаленных узлов идут по обратному волокну на оптический коммутатор (комбайнер), после чего попадают на вход центрального узла. При приходе одновременно нескольких сигналов на центральный узел возникает коллизия, которая разрешается стандартным путем.
10Base-FB. Эта спецификация определяет двухволоконный канал протяженностью до 2 км для создания магистральных сегментов "точка-точка" между повторителями. Она базируется на синхронной системе приема-передачи, обеспечивая восстановление таймерных характеристик и большое число (до 15) последовательно установленных повторителей.
10Base-FL — определяет двухволоконный канал протяженностью до 2 км, который может использоваться для установлении соединения "точка-точка" между станцией и повторителем, или между двумя повторителями. Асинхронная система приема-передачи (в отличии от принятой в 10Base-FB) позволяет значительно снизить стоимость оборудова- ния. Появление стандарта на одномодовое волокно дало возможность строить сверх- протяженные сегменты (до 100 км, дуплексный режим), и сделало более весомыми аргументы в пользу стандарта 10Base-FL. Эта спецификация получила наиболее широкое распространение в современных сетях Ethernet.
В
табл. 7.2 указаны типы физических интерфейсов Ethernet и их основные
характеристики (спецификации 108road36, 10Base-FP и 10Base-FB далее не
рассматриваются ввиду их редкого применения). 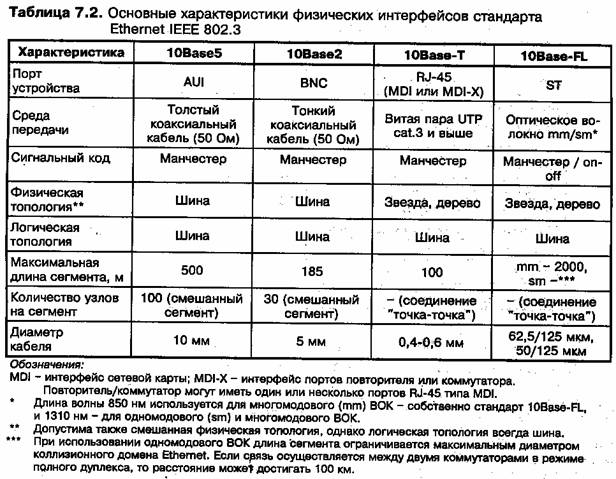
7.2. Основные типы устройств Ethernet
AUI интерфейс и трансиверы Ethernet
Интерфейс AUI (attachment unit interface) — это средонезависимый интерфейс в рамках стандарта Ethernet, который обеспечивает вертикальное взаимодействие между подуровнем физической сигнализации PLS (physical signaling) и подуровнем физического подключения к среде PMA (physical medium attachment), рис. 7.6. Этот интерфейс может быть либо интегри- рован внутри сетевого устройства (тогда наружу предоставляется один из стандартных ин- терфейсов, например 10Base-Т, или 10Base-FL), либо сам выводится наружу.
Отдельное устройство с уровнями PMA и MDI называется трансивером (transceiver)— MAU (media attachment unit, элемент подключения среды). Стандартный разъем со стороны устройства, охватывающего вышележащие уровни, т.е. PLS и выше (таким устройством может быть сетевая карта, коммутатор, концентратор) называется AUI портом, а со стороны устройства, охватывающего нижележащие уровни, т.е. PMA и MDI, — портом MAU.
Порт AUI имеет 15 контактов (гнезд), и соответственно, порт MAU имеет 15-контактный (пиновый) разъем так, что трансивер может непосредственно подключаться к AUI порту сетевого устройства. Допустимо также подключение трансивера стандартным трансиверным интерфейсным кабелем толщиной 1 см, длина которого не должна превышать 50 м. На практике получили распространение упрощенные трансиверные кабели с затуханием, в 4 раза превышающим стандартное. Длина таких кабелей не должна превышать 12,5 м. Из 15 медных жил трансиверного кабеля реально используются только 10 — жилы с порядковыми номерами 4, 7, 8, 14 и 15 не используются. Питание трансивера осуществляется по этому кабелю от порта
AUI.

По типу средозависимого (физического) интерфейса различают четыре разновидности трансиверов MAU: на 10Base5 — трансивер, обеспечивающий подключение толстого коакси- ального кабеля, обычно такой трансивер имеет специальные "вампиры" для закрепления на кабеле; на 10Base2 (BNC) — трансивер-переходник для подключения сегмента на тонком коаксиальном кабеле; на 10Base-Т (RJ-45) — трансивер для подключения витой пары; на 10Base-FL (две оптические розетки ST) — оптический трансивер для подключения волоконно- оптического кабеля (ВОК). Особенностью трансиверов ВОК и на витую пару является потенциальная поддержка дуплексного режима работы.
Основными поставщиками оптических трансиверов на
российском рынке являются фирмы Allied Telesyn [7], NBase [8], SVEC [9],
Surecom [10], Transition Networks [11]. Фирма NBase поставляет наиболее широкий
спектр оптических трансиверов, от многомодовых с расстоянием до 2 км до одномодовых с расстоянием до 110 км (таблица 7.3, рис. 7.7 а). 
Оптические конвертеры Ethernet UTP (108ase-Т/108ase-FL, 10Base2/10Base-FL)
Оптические конвертеры обеспечивают преобразование электрического сигнала из витой пары и тонкого коаксиального кабеля в оптический сигнал, идущий по многомодовому или одномодовому волокну. Конвертер, в отличие от трансивера, должен иметь свой отдельный блок питания. Конвертеры могут выпускаются как в виде отдельной небольшой коробочки с внешним блоком питания, рис. 7.7 б, так и в виде шасси 19", которое может наполняться разнообразными конвертерными модулями, рис. 7.7 в. Исполнение в виде шасси особенно удобно при обустройстве центральных оптических узлов сетей с топологией звезды. Разнообразные модули позволяют подключаться как по многомодовому, так и по одномодовому волокну, как по Ethernet, так и по Fast Ethernet. Для повышения надежности, шасси некоторых производителей могут иметь резервирование по питанию.
Конвертеры 10Base-Т/10Base-FL сразу преобразовывают манчестерский электрический код на входе в манчестерский оптический сигнал на выходе и наоборот, внося минимальную задержку (1-3 бита). Большинство конвертеров могут поддерживать как полудуплексную, так и дуплексную связь, причем в первом случае в устройство внедряется специальный узел обнаружения коллизий. Но фактически, даже при наличии коллизий, канал связи остается дуп- лексным, а работа устройства не выходит за пределы уровня MDI.
Особенностью оптических конвертеров Ethernet BNC (10Base2/10Base-FL), которые подключаются к коаксиальному сегменту обычно вместо терминатора, является ретрансляция сигнала коллизии в коаксиальный сегмент. Сигнал коллизии генерируется и передается в коаксиальный сегмент всякий раз, когда на конвертер приходят одновременно данные из коаксиального и волоконно-оптического сегментов, или приходит сигнал коллизии по коаксиаль ному сегменту. В последнем случае говорят, что сигнал коллизии отражается конвертером обратно в коаксиальный сегмент. Фактор отражения приводит к эффективному увеличению длины сегмента в два раза и запрещает установку на обе стороны коаксиального сегмента рассматриваемых конвертеров — с одной стороны обязательно должен быть стандартный терминатор 50 Ом.
Крупными зарубежными производителями оптических конвертеров Ethernet на витую пару являются компании: Adaptec[13], IMC [14], LANCAST, NBase, NetOptics [15], FOCI и др. Крупными поставщиками отечественных конвертеров в России являются компании Ай- Ти, "Вимком-Оптик", СКБ ИРЭ, -Телеком-Комплект-Сервис".
Рабочая станция, сетевая карта
Персональный компьютер (файл-сервер) обычно подключается к сети с помощью сетевой карты или сетевого адаптера NIC (network interface controller, network interface card). Такой компьютер становится сетевой рабочей станцией. Далее также будет использоваться термин сетевой узел DTE (data termination equipment, оконечное оборудования данных).
Простейший способ объединения рабочих станций в сеть (без привлечения других специализированных сетевых устройств) осуществляется на основе тонкого коаксиального кабеля — соответствующие сетевые карты должны иметь порты BNC. Однако этот способ подключения, а также способ подключения посредством толстого коаксиального кабеля через специальные трансиверы являются устаревшими и преимущественно используются лишь там, где еще сохранились коаксиальные кабельные системы. Наиболее распространенным интерфейсом считается интерфейс RJ-45 на витую пару (тип MDI). Другой интерфейс AUI может использоваться для подключения трансивера Ethernet. В частности, можно использовать оптический трансивер, если рабочая станция удалена на большое расстояние от концентратора или коммутатора.
Волоконно-оптический
интерфейс также может непосредственно поддерживаться сете- вой картой Ethernet
(рис. 7.8). 
Каждая сетевая карта Ethernet имеет уникальный номер — МАС-адрес размером 6 байт, который зашит внутрь, и который не может быть изменен. Первые три байта поля служат для идентификации производителя сетевой карты, а последние три байта составляют уникальный номер конкретной сетевой карты.
Повторитель (концентратор)
Повторитель
(repeater)~ — многопортовое устройство, которое позволяет объединить
несколько сегментов. Принимая кадр или сигнал коллизии по одному из своих
портов, повторитель перенаправляет его во все остальные порты, рис. 7.9 а. Типы
интерфейсов портов могут быть любые из вышеперечисленных. Распространены
устройства с несколькими портами на витую пару (12, 16 и 24 порта RJ-45), одним
портом BNC и одним портом AUI. Также популярны миниатюрные повторители, имеющие
только порты на витую пару (4х RJ-45, или 8 х RJ-45). Отметим, что повторители
Ethernet работают на физическом уровне модели OSI (рис. 7.9 б), что
обеспечивает их низкую стоимость и выгодно этим отличает от концентраторов FDDI
(DAC, SAC, NAC), которые охватывают также уровень MAC (нижний подуровень
канального уровня модели OSI) 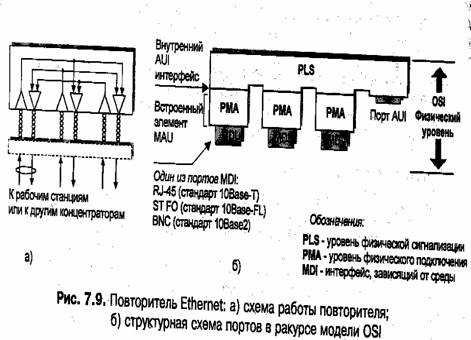
Порты RJ-45 типа MDI и MDI-Х. Порт RJ-45 имеет 8 контактов. Кабель называется прямым, когда контакты 1-8 порта RJ-45 на одной стороне соединены с соответствующими контактами на другой стороне. Соединение прямым кабелем можно осуществлять только между разными типами портов. При этом кабель представлен четырьмя витыми парами, которые принято нумеровать следующим образом: пара 1 — контакты 1, 2; пара 2 — контакты 3, 6; пара 3 — контакты 4, 5; пара 4 — контакты 7, 8.
В стандарте 10Base-Т для передачи используются только две витые пары кабеля: 1 и 2, остальные две не задействованы. Интерфейс MDI (или DTE) имеет устройство, которое осуществляет передачу по паре 1 и соответственно прием по паре 2. И наоборот, интерфейс MDI-Х имеет устройство, которое осуществляет передачу по паре 2 и соответственно прием по паре 1. Для соединения двух однотипных портов RJ-45 прямой кабель не годится. Вместо него используется кросс-кабель, который обеспечивает соединение контактов 1-3, 2-6, 3-1, 6-2, 4-4, 5-5, 7-7, 8-8.
Большинство RJ-45 портов повторителей делаются типа MDI-Х, что позволяет подключать рабочие станции при помощи прямого кабеля. Для удобства обычно один порт повторителя имеет переключатель и может поддерживать режим MDI. Так, в конфигурации сети на рис. 7.10 связь между повторителями1 и 2, а также 3 и 2 можно осуществить прямым кабелем, если соответствующие порты RJ-45 повторителей 1 и 3 переключить в режим MDI, (пор- ты повторителя 2 — стандартные MDI-Х).
Jabber-функция. Каждому узлу сети Ethernet отводится определенное время, в течение которого он должен передать кадр. В нормальных условиях, когда нет коллизий, кадр максимальной длины 1518 байт передается рабочей станцией в течение 1,2 мс. Затем в течение времени межкадрового интервала линия остается свободной. При сильной загруженности сегмента (большое число станций пытаются передавать одновременно, и велико число коллизий) время, в течение которого линия может быть занята, сильно возрастает. Если такой загруженный сегмент подключен к одному из портов повторителя и инициирует длительный сигнал без замолкания (jabber signal — дословно, болтовня), то повторитель прекратит ретрансляцию данных и коллизий из этого сегмента в другие сегменты, таким образом пол- ностью исключив перегруженный сегмент. Для этой цели концентратор поддерживает специ- альную jabber-функцию. Стандартом установлено не конкретное время срабатывания, а окно приема непрерывного сигнала от 20 до 150 мс, при котором концентратор должен исключать "плохой" сегмент. Jabber-функция — полезное свойство повторителя, на основе которой последний может исключать как перегруженный коллизионный сегмент, так и неисправный сегмент, или неисправную станцию, которые передают длительный сигнал, и, тем самым, предоставляет возможность работать пользователям, подключенным к другим портам [16].
Отметим, что хотя витая пара (10Base-Т) и двухволоконный оптический кабель (10Base-FL) являются дуплексными средами, т.е. передача и прием сигнала происходят по независимым .каналам, сам по себе повторитель Ethernet не позволяет обеспечить дуплексную передачу и создает вокруг себя коллизионный момент. При этом сеть функционирует так, как будто реализована шинная топология. Сигнал коллизии передается концентратором во все порты, всякий раз, когда на какие-либо его два порта одновременно или почти одновременно начинают поступать данные. Из-за этого пропускная способность концентратора не может быть выше 10 Мбит/с.
Обнаружение
коллизий при физической топологией типа звезда" (стандарты 10Base-Т и
10Base-FL) с использованием повторителей несколько отличается от случая, когда
используется физическая топология "шина" (стандарты 10Base2 и
10Base5). Поскольку каналы связи по витой паре и по оптическому волокну
дуплексные, то накладка сигналов от разных передающих устройств, свойственная
коаксиальной кабельной системе и приводящая к изменению постоянной составляющей
электрического потенциала в канале связи, исключена. Сигнал коллизии должен
специально генерироваться устройством или устройствами, которые обнаружили
коллизию. Процедура обнаружения коллизий при физической топологии
"звезда" с несколькими повторителями показана на рис. 7.10. 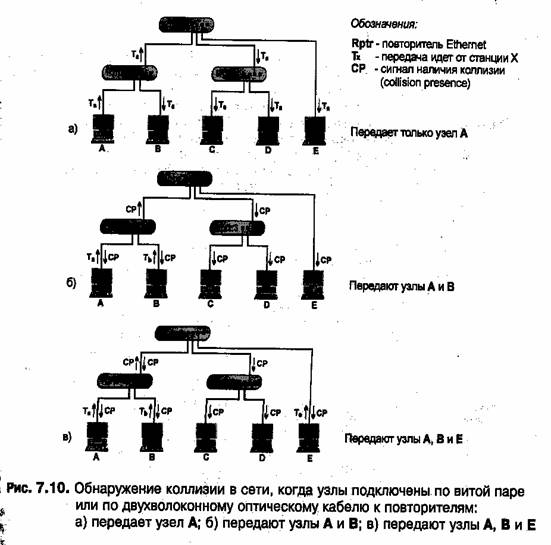
Если передает только один узел (А), то каждый повторитель ретранслирует каждый получаемый кадр во все остальные свои порты (рис. 7.10 а). Все остальные узлы коллизионного домена регистрируют передачу кадра, но только один узел, а именно тот, которому адресован кадр (собственный МАС-адрес совпадает со значением поля "адрес назначения"), принимает кадр, и далее передает его содержимое протоколу более высокого уровня. Коллизий нет.
Если два узла (например, А и В) начинают передачу одновременно или почти одновременно, то коллизию обнаруживает повторитель 1 (рис. 7.10 б), который после этого во все свои порты выдает сигнал наличия коллизии СР (collision presence). Передаваемые узлы А и В обнаруживают коллизию, поскольку принимают другие сигналы во время своих собственных передач, после чего отменяют передачу своих кадров, передают сигналы jam и затем замолкают. Повторитель 1 прекращает передавать сигнал CP, когда на его входные порты перестают поступать сигналы. Повторитель 2, получая сигнал CP от концентратора 1, транслирует его во все остальные порты. То же самое делает повторитель 3.
На рис. 7.6 в показан пример разрешения коллизии при передаче трех узлов А, В и E. Зафиксирован момент, когда повторитель 2 уже обнаружил сигнал коллизии CD от повторителя 1 и передачу кадра от узла Е. Поэтому повторитель 2 выдает выходной сигнал CP во все порты. Повторитель 1, получая сигнал по трем портам, выдает сигнал CP во все свои порты.
Итак, повторитель работает следующим образом (рис. 7.10):
1. когда повторитель получает кадр или сигнал CP только на один из своих портов, он транслирует кадр или сигнал CP во все остальные порты (трансляция в остальные порты идет только до тех пор, пока поступают данные на один из портов);
2. когда повторитель получает кадры или сигналы CP по двум или более портам, он транслирует сигналы CP во все порты без исключения (трансляция во все порты сигналов CP идет только до тех пор, пока поступает сигнал на два или более портов).
Коммутатор
Коммутатор — многопортовый мост. Коммутатор работает на втором канальном уровне OSI модели. Главное назначение коммутатора — обеспечение разгрузки сети посредством локализации трафика в пределах отдельных сегментов.
Ключевым звеном коммутатора является архитектура без
блокирования (non-blocking), которая позволяет установить множественные связи
Ethernet между разными парами портов одновременно, причем кадры не теряются в
процессе коммутации. Сам трафик между взаимодействующими сетевыми устройствами
остается локализованным. Локализация осуществляется с помощью адресных таблиц,
устанавливающих связь каждого порта с адресами сетевых устройств, относящихся к
сегменту этого порта, рис. 7.11. 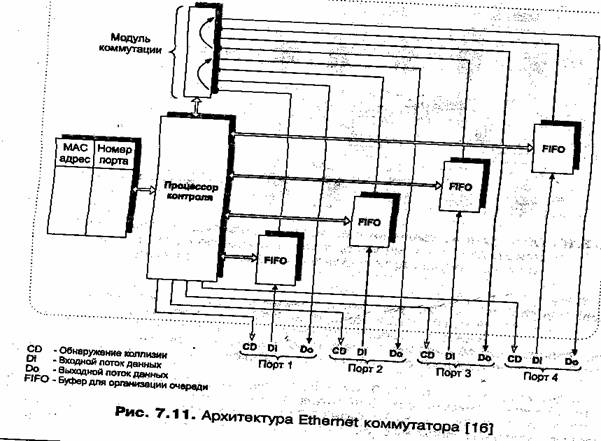
Таблица заполняется в процессе анализа коммутатором адресов станций-отправителей в передаваемых ими кадрах. Кадр передается через коммутатор локально в соответствующий порт только тогда, когда адрес станции назначения, указанный в поле кадра, уже содержится в адресной таблице этого порта. В случае отсутствия адреса станции назначения в таблице, кадр рассылается во все остальные сегменты. Если коммутатор обнаруживает, что МАС- адрес станции назначения у приходящего кадра находится в таблице МАС-адресов, приписанной за портом, по которому пришел данный кадр, то этот кадр сбрасывается — его непосредственно получит станция назначения, находящаяся в том же сегменте. И наконец, если приходящий кадр является широковещательным (broadcast), т.е. если все биты поля МАС- адреса получателя в кадре задаются равными 1, то такой кадр будет размножаться коммутатором (подобно концентратору), т.е. направляться во все остальные порты.
Различают две альтернативные технологии коммутации: 1. без буферизации (cut-through, также используется термин on-the-fly — на лету); 2. с буферизацией SAF (store-апс) forward, также используется термин buffered switching— буферная коммутация).
Коммутатор, работающий без буферизации (рис. 7.12 а), практически сразу же после чтения заголовка, а именно МАС-адреса станции получения и выполнения идентификации, перенаправляет получаемый кадр в нужный порт, не дожидаясь его полного поступления. Главное преимущество такой технологии — малая задержка пакета при переадресации, которая составляет у наиболее быстрых коммутаторов 140-150 ВТ (1,4-1,5 мкс). Главный недостаток — в том, что такой коммутатор будет пропускать из одной сети в другую дефектные кадры (укороченные — меньше 64 байт, или имеющие ошибки), так как выявление ошибок может происходить только после чтения всего кадра и сравнения рассчитанной контрольной суммы с той, которая занесена в поле контрольной последовательности кадра. Распространение ошибок в большей степени касается сетей Ethernet с более, чем одним подключенным пользователем на порт. В этом случае протокол Ethernet может генерировать как укороченные, так и поврежденные кадры, поскольку коммутатор не может предвидеть возникновение коллизий в сегменте, из которого поступает кадр.
Современные коммутаторы cut-through используют более продвинутый метод коммутации, который носит название ICS (interim cut-through switching — промежуточная коммутация на лету). Суть этого улучшения заключается в отфильтровывании укороченных кадров, т.е. кадров с длиной меньше 64 байт (512 бит). До тех пор, пока коммутатор не принял первые 512 бит кадра, он не начинает ретранслировать кадр в соответствующий порт. Если кадр за- канчивается раньше, то содержимое буфера очищается, кадр отфильтровывается. Несмотря на увеличение задержки до 512 ВТ и более (> 5,12 мкс), метод ICS значительно лучше традиционного cat-through, поскольку не пропускает укороченные кадры. К главному недостатку ICS относится возможность пропускания дефектных пакетов длиной, больше 64 байт. Поэтому коммутаторы ICS не годятся на роль магистральных коммутаторов.
Напротив, коммутатор, работающий с буферизацией (рис. 7.12 б), прежде чем начать передачу кадра в порт назначения, полностью принимает его, буферизует. Кадр сохраняется в буфере до тех пор, пока анализируется адрес назначения (destination address, DA) и сравнивается контрольная последовательность кадра FCS, после чего коммутатором принимается решение о том, в какой порт перенаправить кадр или вообще его не передавать (отфильтровать). Главное преимущество коммутации с буферизацией в том, что в этом методе гарантируется передача только "хороших" кадров. Коммутаторы с портами, работающими на разных скоростях, например Ethernet и Fast Ethernet, равно как и коммутаторы-мосты Ethernet-FDDI могут работать только на основе технологии коммутации с буферизацией. Максимальную задержку имеет кадр наибольшей длины 1512 байт (1512х64= 96768 ВТ, --1 мс). Однако недостаток, связанный с задержкой кадра на время буферизации, не считается критичным, поскольку идет непрерывный поток кадров. Более того, основная причина задержки связана с пакетными очередями при буферизации на входных и выходных портах коммутатора. Поэтому в настоящее время большее предпочтение со стороны фирм-производителей отдается этой технологии коммутации.
Обратное
давление. Входные и выходные буферы требуются коммутатору, чтобы уменьшить
количество теряемых кадров при перегруженности одного из выходных портов.
Однако это не дает полного спасения при длительных передачах. Например
допустим, в порт 1 постоянно передаются данные из портов 2, 3 и 5. Если
скорости передачи по всем портам одинаковые и равны скорости канала, то после
заполнения соответствующих буферов кадры начнут теряться — коммутатор будет
просто сбрасывать вновь входящие кадры по портам 2, 3 и 5. Потери пакетов
означают, что посредством протокола более высокого уровня (например, на уровне
сессий для протокола ТСР/IP), будет производиться повторная передача кадров. Но
поскольку в протоколе задействованы конечные устройства, то времена между
первоначальной и повторной передачами кадра могут быть большими. Для
предотвращения этого современные коммутаторы обладают функциональной
возможностью контроля и управления потоками (flow control) поступающих в порты
кадров. Для коммутаторов Ethernet эта функция известна как обратное давление
(BP, back pressure), рис. 7.13. Ограниченность выходного канала по порту 1
приводит к заполнению входных буферов на портах 2, 3 и 5. Узел BP коммутатора,
обнаруживая это, начинает передачу пустых кадров в те каналы, от которых
переполняются входные буферы портов. Так, если переполняется входной буфер по
порту 2, то пустые кадры коммутатор шлет в сегмент В, умышленно создавая
коллизии в этом сегменте, в результате которых уменьшается поток кадров от
передающего устройства в этом сегменте. Вместо генерации холостых кадров при
отработке механизма обратного давления в коммутаторах может использоваться
генерация сигнала затянувшейся передачи, причем последний метод считается более
эффективным средством от потери кадров. Отметим, что механизм обратного
давления можно реализовать исключительно в коммутаторах Ethernet, поскольку
этот механизм напрямую использует возможности протокола CSMA/CD. 
Порты RJ-45 коммутаторов обычно делают типа MDI-Х.
Современные коммутаторы имеют множество дополнительных возможностей, среди которых: фильтрация по МАС-адресам, построение виртуальных сетей, функция контроля потока, автоконфигурирование порта 10Base-Т/100Base-ТХ, поддержка дуплексного режима передачи.
7.3. Проектирование сети в пределах коллизионного домена Ethernet
При проектировании коллизионного домена сети Ethernet, особенно при большой про- тяженности (диаметр > 2,5 км), а также при большом числе последовательно установленных повторителей (> 2), необходимо проводить анализ параметров сети на соответствие стандарту. Отправной точкой может служить модель 1 — наиболее часто используемая при проектировании. Если параметры сети удовлетворяют этой модели, то сеть спроектирована правильно. В некоторых более сложных случаях сеть может не удовлетворять критериям модели 1. Однако это еще не значит, что сеть спроектирована неверно. Тогда следует проводить более тщательный анализ параметров коллизионного домена, руководствуясь моделью 2.
Расчет параметров коллизионного домена Ethernet (Модель 1)
Модель 1 дает возможность в простых случаях быстро определить, соответствует ли планируемая сеть основным требованиям стандарта Ethernet. Модель 1 устанавливает следующий набор правил, каждое из которых должно быть удовлетворено [4, 17].
Повторители требуются для объединения всех сегментов сети. (Используемые повторители должны удовлетворять требованиям спецификаций стандарта IEEE 802.3 раздел 9 и поддерживать такие функции, как восстановление формы сигнала и временных харак- теристик, регенерация преамбулы и др.)
Трансиверы, подключенные к повторителям по AUI интерфейсу (рис. 7.9 б), учитываются только в том случае, когда они являются частью анализируемого пути между удаленными узлами (DTE). (Трансиверы обычно нужны для подключение сегментов — толстого коаксиального кабеля Ethernet и волоконно-оптического кабеля. Витая пара и тонкий коаксиальный кабель подключаются к повторителю через встроенные MAU элементы)
Путь передачи данных между любыми двумя DTE может включать в себя до 5 сегментов, 4 повторителей (с необязательными AUI портами), 2 трансиверов (отдельными MAU устройствами) и 2 трансиверных интерфейсных кабелей (MAU элементы, встроенные в по- вторители, не подсчитываются).
Длина трансиверного интерфейсного кабеля не должна превышать 25 м (суммарная длина трансиверного кабеля не превосходит 50 м на один сегмент, поскольку на сегмент — оптический или на основе толстого коаксиального кабеля — требуется два трансивера).
Если путь передачи между DTE состоит из четырех повторителей и пяти сегментов, то смешанных сегментов (на основе 10Base2 и/или 10Base5) может быть не больше трех— оставшиеся два сегмента должны быть чисто связными сегментами ("точка-точка", т. е на основе 10Base-T и/или 10Base-FL). Для сегментов 10Base-FL расстояние не должно превосходить 500 м.
Если путь передачи между DTE состоит из трех повторителей и четырех сегментов, используются следующие ограничения:
• максимальная длина по оптическому сегменту (10Base-FL) между повторителями не должна превосходить 1000 м;
• максимальная длина по оптическому сегменту (10Base-FL) между DTE и повторителем не должна превосходить 400 м;
• снимается ограничение на число смешанных сегментов (все четыре сегмента могут быть смешанными, т. е строиться на основе толстого и/или тонкого коаксиальных кабелей).
Проведем
анализ конфигурации сети Ethernet, показанной на рис. 7.14. 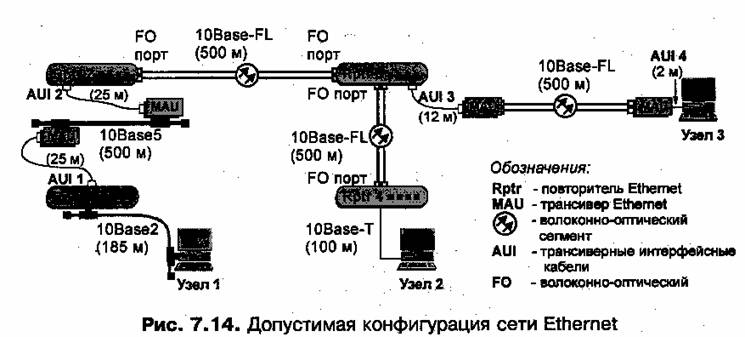
Рассмотрим путь между узлами 1 и 2: число повторителей — 4, сегментов — 5, трансиве- ров — 2, трансиверных интерфейсных кабелей (AUI кабели) — 2, суммарная длина кабелей не превосходит 50 м, число смешанных коаксиальных сегментов 2, т.е. не превосходит 3 (остальные три сегмента — точка-точка). Таким образом, путь между узлами 1 и 2 удовлетворяет требованиям модели 1.
Однако путь между узлами 1 и 3 не удовлетворяет этим требованиям, поскольку число трансиверов на этом пути равно 4. Сами трансиверы не вносят дополнительную задержку. В этом смысле оптический порт трансивера, прикрепленного к повторителю 3 был бы такой же быстрый, как и встроенные оптические порты, если бы длина интерфейсного кабеля AUI 3 равнялась нулю). Но задержку могут вносить трансиверные интерфейсные кабели. Поэтому правильней для анализа пути между узлами 1 и 3 использовать модель 2.
Расчет параметров коллизионного домена Ethernet (Модель 2)
Нет смысла прибегать к использованию модели 2, если выполняется модель 1, поскольку сеть, удовлетворяющая требованиям модели 1, всегда будет удовлетворять требованиям модели 2. Поэтому при исследовании сложного коллизионного домена отдельные простые пути между узлами можно анализировать при помощи модели 1. Модель 2 позволяет проводить анализ более сложных конфигураций путей между удаленными узлами (DTE) коллизионного домена Ethernet [4, 18]. Два параметра вычисляются в этой модели: во-первых, задержка на двойном пробеге RTD для каждого пути в пределах коллизионного домена — она должна быть меньше 575 ВТ; во-вторых, проверяется допустимое уменьшение межкадрового интервала IFG - это уменьшение должно находиться в пределах 49 ВТ.
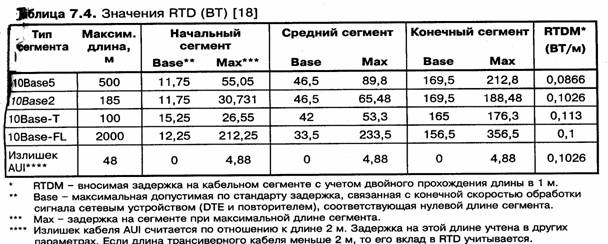
Расчет RTD. Путь между двумя DTE в общем случае состоит из одного начального, нескольких средних, и одного конечного сегментов. Для каждого пути на основе табл. 7.4 суммируются задержки на промежуточных сегментах. Если между DTE1 и DTE2 только один повторитель, то промежуточных сегментов не будет, и RTD определяется только суммой задержек от начального и конечного сегментов. Если интерфейсы DTE1 и DTE2 разные, то задержка RTD будет несколько отличаться в зависимости от того, с какой стороны выбран начальный сегмент. Сравнивать с 575 ВТ следует наибольшее из подсчитанных значений. Задержка на сегменте длины L считается по формуле RTD = Base+RTDMxL.
Ниже приводится расчет RTD по модели 2 для всех путей сети, показанной на рис. 7.14:
RTD(1, 2) = 30,73+89,8+4,88+2x33,5+(500+500)x0,1+176,3 = 468,71 ВТ
RTD(2, 1) = 26,55+89,8+4,88+2x33,5t(500+500)x0,1+188,48 = 476,71 ВТ
RTD(1, 3) = 30,73+89,8+4,88+(72 — 2)x0,1026+2x33,5+(500+500)x0,1+156,5 = 449,936 ВТ RTD(3, 1) = 2,25+89,8+4,88+(12 — 2)x0,1026+2x33,5+(500+500) x0,1+188,48 = 463,436 ВТ RTD(2, 3) = 26,55+2x33,5+(500+500)x0,1+(12 — 2)x0,1026+156,5 = 351,076 ВТ RTD(3, 2) = 12,25+2x33,5+(500+500)x0,1+(12 — 2)x0,1026+176,3 = 356,576 ВТ
Запасом надежности SF (safety margin) называется
величина 575-max (RTD). При проектировании сетей Ethernet SF берут в пределах
от 0 до 5 ВТ. Для сети (рис. 7.14) SF = 575 — 477 = 98 ВТ. Запас в 5 ВТ
соответствует длине 50 м и позволяет в непредви денных ситуациях после
инсталляции нарастить тот или иной сегмент, или добавить око- нечное устройство.
Пример 7.1 (рис. 7.15 а). Строится сеть Ethernet, основанная на двух повторителях, связанных между собой волоконно-оптическим сегментом. Узлы сети подключаются к повторителям по витой паре. Оценить максимальное допустимое расстояние сегмента между повторителями.
Решение. Пусть максимальная допустимая длина L. Тогда с учетом SF = 5 ВТ имеем: RTD+SF = 26,55+33,5+Lx0,1+176,3+5=575 ВТ. Отсюда L = 3336 м. Если оптический сегмент строится на основе многомодового волокна, максимальная длина будет 2000 м, которая установлена стандартом, причем ограничение вызвано характеристиками оптических приемопередатчиков. Возможна большая длина, если использовать нестандартные оптические приемопередатчики с более высоким динамическим диапазоном. Нет ограничений на длину 2000 м, если сегмент строить на основе одномодового волокна и использовать одномодовые лазер- ные передатчики — тогда ответ L = 3336 м.
Пример 7.2 (рис. 7.15 б). Условие то же, что и в примере 7.1, только в сети три последовательных повторителя, два оптических сегмента. Оценить максимальную допустимую суммарную длину оптических сегментов.
Решение. Пусть длины сегментов L, и Lg. Тогда с учетом SF = 5 ВТ имеем:
RTD+SF = 26,55+33,5+33,5+(L,+Lg)x0,1+176,3+5 = 575 ВТ. Отсюда Lg+Lg = 3001 м. Пример 7.3 (рис. 7.15 в). Оценить максимальное допустимое расстояние L оптического
сегмента в сети, состоящей из двух узлов (канал считать полудуплексным).
Решение. Полудуплексный канал создает коллизионный домен. Поэтому необходимо рассчитать задержку на двойном пробеге. Рассчитаем сначала задержку между узлом 1 и 2 для случаев с двумя и одним повторителями:
(2 повторителя): RTD = 12,25+156,5+33,5+LxO, (1 повторитель): RTD = 12,25+156,5+Lx0,1
Сразу видно, что каждый дополнительный повторитель создает дополнительную задержку 33,5 ВТ. Тогда задержка при отсутствии повторителей будет на 33,5 ВТ меньше, чем при одном повторителе, т.е.:
(О повторителей) RTD+SF = 12,25+156,5-33,5+Lx0,1+5 = 575 ВТ. Отсюда L = 4347 м. Расчет допустимого уменьшения межкадрового интервала. Межкадровый интервал IFG в 96 ВТ выдерживается любой станцией, которая ведет последовательную передачу кадров, или станцией, которая только собирается приступить к передаче. Благодаря наличию интервала между кадрами приемные узлы способны обрабатывать каждый приходящий кадр. Конечный межкадровый интервал также нужен для
правильной работы протокола
САМА/CD. Однако интервал в 96 ВТ, поддерживающийся передающей станцией, не
означает, что и на приемную станцию кадры будут поступать с таким же интервалом.
При движении кадров по сети могут возникать меняющиеся временные задержки,
связанные с ретрансляцией кадров сете выми компонентами. Кроме того, вариации
задержки могут возникать из-за процессов рекон- струкции сигнала на
повторителях — повторитель, восстанавливая преамбулу, добавляет в нее
потерянные ранее биты. Эти задержки, аккумулируясь, способны значительно
уменьшать межкадровый интервал SVV (segment variability value), что, в свою
очередь, может приводить к неправильной идентификации принимаемого кадра и, в
итоге, к потери кадра. Стандартом установлена величина максимального
допустимого уменьшения межкадрового интервала, составляющая 49 ВТ. 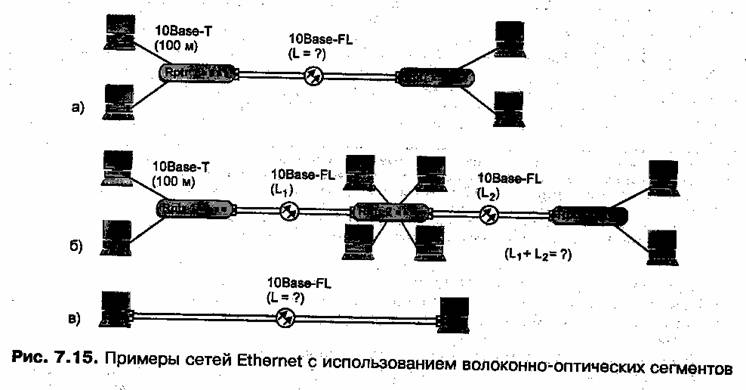
Поскольку
уменьшение IFG происходит только на промежуточных сетевых устройствах, то
последний сегмент, к которому подключен приемный узел сети, сам по себе не
приводит к уменьшению IFG. Поэтому для расчета величины SVV суммируют величины
допустимых уменьшений по всем предыдущим сегментам, каждый из которых замыкается
повторителем. Если в сети приемный и передающий узлы подключены к разным
сегментам, то следует в качестве передающего сегмента выбирать сегмент с
большей величиной допустимого уменьшения IFG. 
Приведем расчет SVV/ для сети, показанной на рис. 7.14:
SVV (узел 1, узел 2) = 16+11+8+8 = 43 ВТ
SVV (узел 2, узел 1) = 10,5+8+8+11 = 37,5 ВТ SVV (узел 1, узел 3) = 16+11+8 = 35 ВТ
SVV (узел 3, узел 1) = 10,5+8+11 = 29,5 ВТ '~Ф SVV/ (узел 2, узел 3) = 10,5+8 = 18,5 ВТ SVV (узел 3, узел 2) = 10,5+8 = 18,5 ВТ
Как видно, максимальная величина SVV не превосходит 49 ВТ, значит сеть удовлетворяет требованиям модели 2.
В модели 1 наибольшая задержка, равная предельной допустимой, возникает в сети, в которой имеется 5 последовательных коаксиальных сегментов: SVV=16+11+11+11 = 49 ВТ.
Пример 7.4. Оценить максимальное допустимое число сегментов N на пути между двумя удаленными узлами коллизионного домена сети, если считать, что сегменты строятся на основе витой пары и/или оптического волокна. Оценить в этом случае допустимую длину L этого пути.
Решение. Так как средних сегментов всего N-2, то SVV = 10,5+(N-2)х8. Отсюда находим при N = 6, SVV = 42,5 и не превосходит 49 (при N = 7, SVV/ = 50,5>49). Ответ N = 6 последовательных сегментов (5 повторителей). Следует подчеркнуть, что такое число последовательных сегментов не удовлетворяет модели 1. Для оценки L заметим, что все параметры по RTD (включая задержку на распространении сигнала по кабелю) для витой пары больше, чем для оптического волокна (строки 10Base-Т и 10Base-FL табл. 7.4). Поэтому оценку можно сделать для витой пары, допуская замену витой пары на волокно в любом сегменте (суммар- ная длина по сегментам пути может только возрасти):
RTD+SF = 15,25+(N — 2)x42 +165+Lx0,113+5 = 575 ВТ.
Отсюда при N = 6 находим L = 1962 м. Хотя число последовательных повторителей в сети Ethernet, как видно из примера 7.4, не превосходит 5, полное число повторителей в коллизионном домене может быть значитель- но больше, например, не запрещено к центральному повторителю по витым парам подклю- чить 10 удаленных повторителей и т.п. Однако следует всегда учитывать то, что при большом числе рабочих станций (п>20) в коллизионном домене, эффективность сети начинает падать: полоса пропускания ведет себя как 1/n от 10 Мбит/с, а средняя полоса в расчете на одну станцию становится 1/п~. Поэтому в сетях с большим числом рабочих станций следует устанавливать коммутаторы в центральные узлы, создавая множество доменов.
Отметим главные особенности эволюционного развития от сетей Ethernet к сетям Fast Ethernet, стандарт IEEE 802.3и [19, 20]:
• десятикратное увеличение пропускной способности сегментов сети;
• сохранение метода случайного доступа CSMA/CD, принятого в Ethernet;
• сохранение формата кадра, принятого в Ethernet;
• поддержка традиционных сред передачи данных — витой пары и ВОК.
Указанные свойства, а также, являющаяся следствием не менее важная функция под- держки двух скоростей и автоопределения 10/100 Мбит/с, встраиваемая в сетевые карты и коммутаторы Fast Ethernet, позволяют осуществлять плавный переход от сетей Ethernet к более скоростным сетям Fast Ethernet, обеспечивая выгодную преемственность по сравнению с другими технологиями. Еще один дополнительный фактор успешного завоевания рынка— низкая стоимость оборудования Fast Ethernet.
Архитектура стандарта Fast Ethernet
На рис. 7.16 показана структура уровней Fast Ethernet. Еще на стадии разработки стандарта 100Base-Т комитет IEEE 802.3и определил, что не существует универсальной схемы кодирования сигнала, которая была бы идеальной для всех трех физических интерфейсов (ТХ, FX, Т4). Если сравнивать со стандартом Ethernet, то там функцию кодирования (манчестер- ский код) выполняет уровень физической сигнализации PLS (рис. 7.6), который находится выше средонезависимого интерфейса AUI. В стандарте Fast Ethernet функции кодирования выполняет подуровень кодирования PCS, размещенный ниже средонезависимого интерфейса Mll. В результате этого, каждый трансивер должен использовать свой собственный набор схем кодирования, наилучшим образом подходящий для соответствующего физического интерфейса, например набор 4В/5В и NRZI для интерфейса 100Base-FX.
Mll интерфейс и трансиверы Fast Ethernet. Интерфейс Mll (medium independent in- terface) в стандарте Fast Ethernet является аналогом интерфейса AUI в стандарте Ethernet. Mll интерфейс обеспечивает связь между подуровнями согласования и физического кодирования. Основное его назначение — упростить использование разных типов среды. МП интерфейс предполагает дальнейшее подключение трансивера Fast Ethernet. Для связи используется 40-контактный разъем. Максимальное расстояние по Mll интерфейсному кабелю не должно превышать 0,5 м.
Если устройство имеет стандартные физические интерфейсы
(например, RJ-45), то структура подуровней физического уровня может быть скрыта
внутри микросхемы с большой интеграцией логики. Кроме того, допустимы
отклонения в протоколах промежуточных подуровней в едином устройстве, ставящие
главной целью рост быстродействия. 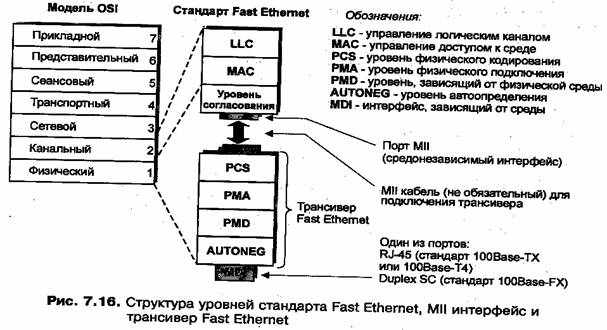
Физические интерфейсы Fast Ethernet
Стандартом Fast Ethernet IEEE 802.3и установлены три типа
физического интерфейса (рис. 7.17, табл. 7.6): 1008ase-FX, 1008ase-ТХ и 1008ase-Т4. 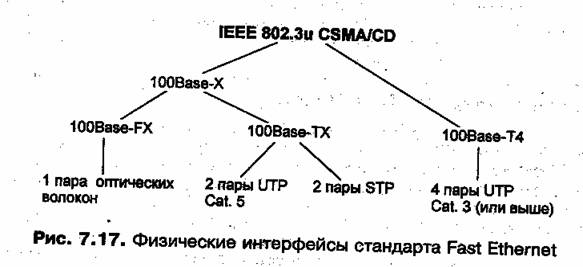
1008ase-FX. Стандарт этого
волоконно-оптического интерфейса полностью идентичен стандарту FDDI PMD,
который подробно рассмотрен в главе 6. Основным оптическим разъемом стандарта
100Base-FX является Duplex $С. Интерфейс допускает дуплексный канал связи. 
1OOBase-ТХ. Стандарт этого физического интерфейса предполагает использование неэкранированной витой пары категории не ниже 5. Он полностью идентичен стандарту FDDI UTP PMD, который также подробно рассмотрен в главе 6. Физический порт RJ-45, как и в стандарте 10Base-Т, может быть двух типов: MDI (сетевые карты, рабочие станции) и MDI-Х (повторители Fast Ethernet, коммутаторы). Порт MDI в единичном количестве может иметься на повторителе Fast Ethernet. Для передачи по медному кабелю используются пары 1 и 3. Пары 2 и 4 — свободны. Порт RJ-45 на сетевой карте и на коммутаторе может поддерживать, наряду с режимом 100Base-TX, и режим 10Base-Т, или функцию автоопределения скорости. Большинство современных сетевых карт и коммутаторов поддерживают эту функцию по портам RJ-45 и, кроме этого, могут работать в дуплексном режиме.
100Base-74. Этот тип интерфейса позволяет обеспечить полудуплексный канал связи по витой паре UTP Cat. 3 и выше. Именно возможность перехода предприятия со стандарта Ethernet на стандарт Fast Ethernet без радикальной замены существующей кабельной системы на основе UTP Cat. 3 следует считать главным преимуществом этого стандарта.
В отличие от стандарта 100Base-ТХ, где для передачи используется только две витых пары кабеля, в стандарте 100Base-Т4 используются все четыре пары (рис. 7.18 а). Причем при связи рабочей станции и повторителя посредством прямого кабеля данные от рабочей станции к повторителю идут по витым парам 1, 3 и 4, а в обратном направлении — по парам 2, 3 и 4. Пары 1 и 2 используются для обнаружения коллизий подобно стандарту Ethernet. Другие две пары 3 и 4 попеременно, в зависимости от команд, могут пропускать сигнал либо в одном, либо в другом направлении. Передача сигнала параллельно по трем витым парам эквивалентна инверсному мультиплексированию, рассмотренному в главе 5. Битовая скорость в расчете на один канал составляет 33,33 Мбит/с.
Символьное кодирование 8В/6Т. Если бы использовалось манчестерское кодирование, то битовая скорость в расчете на одну витую пару была бы 33,33 Мбит/с, что превышало бы установленный предел 30 МГц для таких кабелей. Эффективное уменьшение частоты модуляции достигается, если вместо прямого (двухуровневого) бинарного кода использовать трех- уровневый (ternary) код. Этот код известен как 8В/6Т [16]; это означает, что прежде, чем происходит передача, каждый набор из 8 бинарных битов (си
мвол) сначала преобразуется в соответствии с определенными правилами в 6 тройных (трехуровневых) символов. На приме- ре, показанном на рис.7.18 б, можно определить скорость трехуровневого символьного сигнала: (100 х 6/8)/3 = 25 МГц, значение которой не превышает установленный предел.
Интерфейс
100Base-Т4 имеет один существенный недостаток — принципиальную невозможность
поддержки дуплексного режима передачи. И если при строительстве небольших сетей
Fast Ethernet с использованием повторителей 100Base-TX не имеет преимуществ
перед 100Base-Т4 (существует коллизионный домен, полоса пропускания которого не
больше 100 Мбит/с), то при строительстве сетей с использованием коммутаторов
недостаток интерфейса 100Base-T4 становится очевидным и очень серьезным.
Поэтому данный интерфейс не получил столь большого распространения, как
100Base-TX и 100Base-FX. 
Типы устройств Fast Ethernet
Основные категории устройств, применяемых в Fast Ethernet, такие же как и в Ethernet: трансиверы; конвертеры; сетевые карты (для установки на рабочие станции/файл серверы); повторители; коммутаторы.
Трансивер — это (по аналогии с трансивером Ethernet) двухпортовое устройство, охватывающее подуровни PCS, PMA, PMD и AUTONEG, и имеющее, с одной стороны, MII интерфейс, с другой — один из средозависимых физических интерфейсов (100Base-FX, 100Base-ТХ или 1008ase-T4). Трансиверы используются сравнительно редко, как и редко используются сетевые карты, повторители, коммутаторы с интерфейсом Mll.
Сетевая карта. Наиболее широкое распространение получили сегодня сетевые карты с интерфейсом 100Base-TX на шину PCI. Необязательными, но крайне желательными, функциями порта RJ-45 являются автоконфигурирование 100/10 Мбит/с и поддержка дуплексного режима. Большинство современных выпускаемых карт поддерживают эти функции. Выпускаются также сетевые карты с оптическим интерфейсом 100Base-FX (производители IMC, Adaptec, Transition Networks и др.) — основным стандартным оптическим является разъем $С (допуска- ется ST) на многомодовое волокно.
Конвертер (media converter) — это двухпортовое устройство, оба порта которого представляют средозависимые интерфейсы. Конвертеры, в отличие от повторителей, могут работать в дуплексном режиме за исключение случая, когда имеется порт 1008ase-Т4. Распространены конвертеры 100Base-TX/100Base-FX. В силу общих тенденций роста широкополосных протяженных сетей с использованием одномодовых ВОК потребление оптических приемопередатчиков на одномодовое волокно резко возросло в последние один-два года. Конвертерные шасси, объединяющие несколько отдельных модулей 100Base-TX/100Base-FX, по- зволяют подключать множество сходящихся в центральном узле волоконно-оптических сегментов к коммутатору, оснащенному дуплексными портами RJ-45 (100Base-ТХ).
Повторитель. По параметру максимальных временных задержек при ретрансляции кадров повторители Fast Ethernet подразделяются на два класса:
• Класс (. Задержка на двойном пробеге RTD не должна превышать 130 BT. В силу менее жестких требований, повторители этого класса могут иметь порты Т4 и TX/FX, а также объединяться в стек.
• Класс (1. К повторителям этого класса предъявляются более жесткие требования по задержке на двойном пробеге: RTD<92 BT, если все порты типа TX/FX; и RTD<67 BT, если все все порты типа T4. (В силу значительных отличий в организации физических уровней возникает большая задержка кадра при ретрансляции между портами интерфейсов Т4 и ТХ/FX. Поэтому повторители, совмещающие в пределах одного устройства порты Т4 с портами TX/FX, отнесены по стандарту к классу I.)
Коммутатор — одно из наиболее важных устройств при построении корпоративных сетей. Большинство современных коммутаторов Fast Ethernet поддерживают автоконфигуриро вание 100/10 Мбит/с по портам RJ-45 и могут обеспечивать дуплексный канал связи по всем портам (за исключением 100Base-Т4). Коммутаторы могут иметь специальные дополнительные слоты для установления up-link модуля. В качестве интерфейсов у таких модулей могут выступать оптические порты типа Fast Ethernet 100Base-FX, FDDI, АТМ (155 Мбит/с), Gigabit Ethernet и др. Крупными производителями коммутаторов Fast Ethernet являются компании: 3Com, Вау Networks, Cabletron, DEC, Intel, NBase, Cisco и др.
7.5. Проектирование сети в пределах коллизионного домена Fast Ethernet
Для анализа коллизионного домена в стандарте Fast Ethernet приняты две модели (схожие назначению со стандартом Ethernet). Модель 1 устанавливает жесткие правила, при помощи которых можно анализировать конфигурацию сети. Как и в стандарте Ethernet, эти правила являются достаточными, то есть, если конфигурация сети удовлетворяет этим правилам, то сеть построена верно. Если же конфигурация коллизионного домена не удовлетворяет правилам модели 1, то для анализа следует прибегать к модели 2. Разумеется, любая конфигурация, удовлетворяющая модели 1, будет удовлетворять модели 2.
Модель 1
Основные допустимые конфигурации модели 1 показаны на рис.
7.19 [21]. Расстояния сегментов на витой паре указаны максимальные — в рамках
модели 1 их нельзя превышать. Например, расстояние между двумя повторителями
(модель 10) не должно превышать 5 м. Исходя из этих условий, даются
максимальные значения волоконно-оптических сегментов, гарантированные для этой
модели (табл. 7.7). 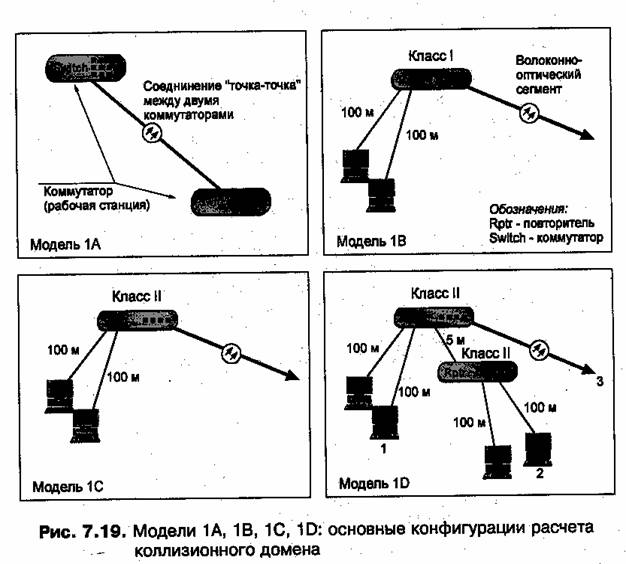
Простейшая
топология (1А) определяет только один сегмент "точка-точка", между
двумя узлами. В качестве устройства на каждом узле может выступать как
оконечное оборудование данных (рабочая станция, файл-сервер), так и коммутатор.
Если узлы не поддерживают дуплексный режим передачи, то максимальное расстояние
межу ними 412 м. Если узлы поддерживают дуплексный режим, то ввиду отсутствия
коллизионного домена, единственными факторами, ограничивающими расстояние,
становятся дисперсионные характеристики волокна, его тип, а также технические
характеристики приемопередатчиков (мощность, спектральное уширение передатчика,
чувствительность приемника). 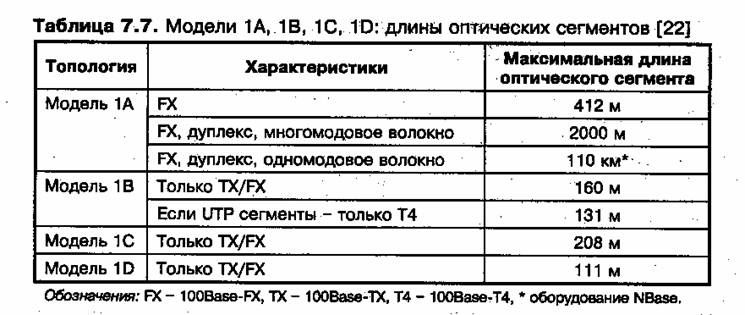
Остальные модели отражают конфигурации с повторителями: модель 1В — один повто- ритель класса I (больше одного повторителя класса по модели 1 подключать нельзя), модели 1C и 1D — повторители класса II. Подключение коммутатора вместо оконечного оборудования не меняет параметров, поскольку остается коллизионный домен.
Модель 2
Модель основывается на строгом расчете величины RTD для различных пар удаленных устройств. В стандарте Fast Ethernet время RTD не должно превосходить 512 ВТ. Эта цифра отличается от аналогичного параметра в стандарте Ethernet (575 ВТ), но отличие не более чем формальное, поскольку уменьшение максимальной задержки на преамбулу в Fast Ethernet сопровождается пересчетом параметров задержки на DTE, которые тоже уменьшены на вре- мя передачи преамбулы.
В силу синхронности режима передачи кадров, а также из-за небольшого числа повторителей в пределах коллизионного домена в Fast Ethernet отсутствует проблема, связанная с уменьшением величины межкадрового интервала (свойственная сетям Ethernet).
Полное время RTD пути между двумя удаленными узлами вычисляется на основе суммы задержек RTD на промежуточных устройствах, на оконечных устройствах и на кабельных сегментах. В табл. 7.8 приведены принятые стандартом Fast Ethernet допустимые задержки для разных типов устройств. Если используется подключение трансивера, то вплоть до макси- мальной длины интерфейсного Mll кабеля 0,5 м вносимая задержка от него не учитывается и включена в параметры задержки DTE.
С учетом длин сегментов (табл. 7.7) и максимальных допустимых задержек (табл. 7.8) проверим на предмет удовлетворения модели 2 конфигураций А, В, С и D модели 1 (рис. 7.19).
1А: 1В: 1В: 1С: 10: 10: RTD = 100+412х1,0 = 512 ВТ RTD = 100+100х1,112+140+160x1,0 = 511,2 ВТ RTD = 127+100х1,112+140+131х1,0 = 509,2 ВТ RTD = 100+100х1,112+92+208xi,0 = 511,2 ВТ ЯТ0 = 100+205х1,112+2х92 = 511,96 ВТ RTD = 100+105х1,112+2х92+111х1,0 = 511,76 ВТ FX, полудуплексный режим вязи Только TX/FX UTP сегменты только на основе Т4 Только ТХ/FX Только ТХ/FX (между 1 и 2) Только ТХ/FX (между 2 и 3).
Во всех случаях RTD не превосходит 512 ВТ, таким образом конфигурации удовлетворяют модели 2.
Приведем несколько примеров
расчета коллизионных доменов Fast Ethernet по модели 2 (рис. 7.20). В примерах
7.5-7.7 предполагается, что длина всех подключений по витой паре не превосходит
10 м. В примере 7.8 в одном коллизионном домене совмещены два различных типа
физического интерфейса: 100Base-ТХ и 100Base-Т4. 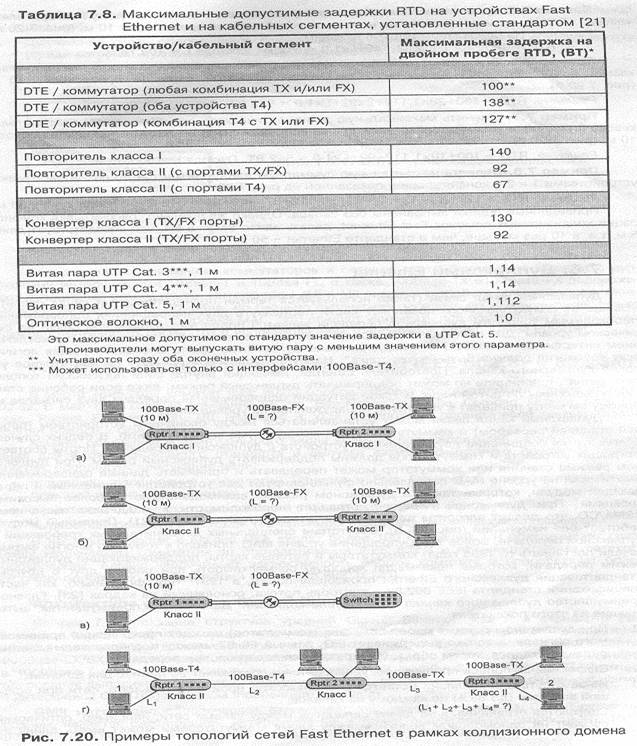
Пример 7.5. Оценить максимальную длину оптического сегмента между повторителями класса I (TX/FX), если длины всех сегментов по витой паре не превосходят 10 м, (рис. 7.20 а).
Решение. На основании табл. 7.8 находим:
RTD = 100+20х1,112+2x140+Lx1,0 = 512 BT. Отсюда L = 109,76 м.
Пример 7.6. Оценить максимальную длину оптического сегмента между повторителями
класса II (ТХ/FX), если длины всех сегментов по витой паре не превосходят 10 м, (рис. 7.20 б).
Решение. RTD = 100+20х1,112+2x92+Lx1 0 = 512 ВТ. Отсюда L = 205,76 м.
Пример 7.7. Оценить максимальную длину оптического сегмента между повторителем
класса II (ТХ/FX) и коммутатором, если длины всех сегментов по витой паре не превосходят 10 м, (рис. 7.20 в).
Решение. RTD = 100+10х1,112+92+Lxi,0 = 512 ВТ. Отсюда L = 308,88 м.
Пример 7.8. Оценить максимальную суммарную длину сегментов по витой паре между
устройствами 1 и 2 в конфигурации, показанной на рис. 7.20 г.
Решение. RTD = 127+(L,+ ( ~+ ( з+ ~.~) x1,112+67+140+92 = 512 ВТ. Отсюда L = 77,33 м. Приведенные оценки выполнены без запаса. Однако желательно, рассчитывая конфигурации коллизионных доменов Fast Ethernet, делать запас SM = 5 ВТ, что соответствует длине 5 м, т.е. в 10 раз меньше, чем в стандарте Ethernet — 50 м.
Дуплексный канал связи (также используется термин полнодуплексный канал связи) в отличие от полудуплексного позволяет вести передачу в двух направлениях одновременно. Необходимым условием дуплексной передачи является поддержка дуплексной связи на физическом уровне. Два основных типа среды — оптическое волокно и витая пара (за исключе- нием интерфейса 100Base-Т4) — поддерживают дуплексную связь. Соответствующая логическая топология должна быть "точка-точка". Наличие дуплексной среды — не достаточное условие дуплексного канала. Повторитель Ethernet, имеющий внутри себя логическую топологию "шина", в принципе не может поддерживать дуплексный режим, даже если рабочие стан- ции подключены по витой паре. В такой ситуации одновременная передача двух сигналов по одному сегменту приведет к коллизии, обнаруженной на уровне МАС.
Дуплексный канал связи может устанавливаться между оконечным устройством (рабочей станцией/сервером) и коммутатором или между двумя коммутаторами. В редких случаях используется соединение двух оконечных устройств с дуплексной передачей. Порты соответствующих устройств и коммутаторов должны поддерживать дуплексный режим. При дуплексном режиме станция или коммутатор может передавать и принимать данные одновременно. Фактически на уровне МАС параллельно функционируют два устройства — приемный и передающий модули, которые также в дуплексном режиме взаимодействуют с более высокими уровнями. При дуплексной передаче отпадает необходимость в поддержке механизма CSMA/CD, что делает алгоритм передачи значительно проще (рис. 7.21). Приемный модуль работает без изменений (рис. 7.4 б). Отсутствие специальных дополнительных требований к дуплексной передаче, более того, упрощение уровня МАС, привело к тому, что многие фирмы начали поставлять (с 1995 года) коммутаторы и сетевые карты, поддерживающие дуплексный режим передачи, которые показывали хорошую совместимость при работе друг с другом. Стандартизация дуплексного Ethernet произошла позже, в 1997 году, формально, как часть спецификаций стандарта IEEE 802.3х — контроль потока, основанный на кадрах [23]. Главное преимущество дуплексного канала — отсутствие коллизий. Дальнейшие преимущества, вытекающие из этого показателя:
1. При дуплексном режиме работы станция (коммутатор) не ждет прекращения принимаемого сигнала, а только выдерживает IFG, равный 96 BT, между последовательными передачами кадров, таким образом сокращаются задержки при передаче.
2. Эффективная полоса пропускания удваивается и составляет 20 Мбит/с для Ethernet.
3. Из-за отсутствия коллизий остается очень высокой производительность сети при большой загрузке (до 98%) по каждому из каналов.
4. Снимаются ограничения на длину сегментов между узлами сети, например, оптический сегмент на одномодовом волокне между двумя коммутаторами может иметь длину до 100 км, хотя при наличии оптических усилителей расстояния могут иметь глобальный масштаб.
5. Дуплексная связь обеспечивает лучшую работу приложений,
критичных к задержкам (среди которых: мультимедийная связь, видеоконференции, и
т.д.). 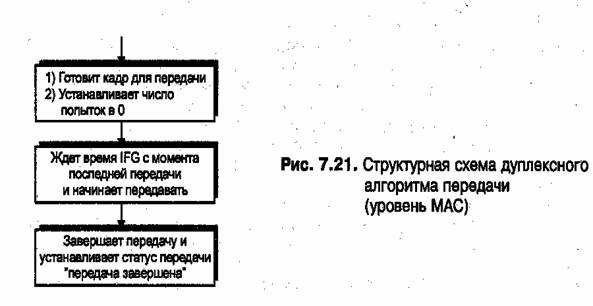
Большинство современных коммутаторов и сетевых карт Ethernet/Fast Ethernet с дуплексными интерфейсами 10Base-Т и 10Base-FL, а также 100Base-ТХ и100Ваве-FX поддерживают дуплексный режим связи. Интерфейсы AUI и МП сетевых устройств (коммутаторов, сетевых карт) дуплексные по природе, но реально дуплексная передача по ним возможна, только если имеется поддержка на уровне MAC. Это следует учитывать при построении протяженных волоконно-оптических сегментов с использованием трансиверов Ethernet/Fast Ethernet.
7.7. Сети Gigabit Ethernet (стандарты IEEE 802.3z и 802.3ab)
В марте 1996 года комитет IEEE 802.3 одобрил проект стандартизации Gigabit Ethernet 802.3z. В мае 1996 года 11 компаний (3Com, Вау Networks, Cisco, Compaq, Granite, Intel, LSI Logic, Packet Engines, Sun, UB Networks и VLSI Technology) организовали альянс Gigabit Ethernet Alliance — GEA [24].
Альянс, объединяя усилия большого числа ведущих производителей сетевого оборудо- вания для выработки единого стандарта и выпуска взаимосовместимых продуктов Gigabit Ethernet, преследует следующие цели:
• поддержка расширения технологий Ethernet и Fast Ethernet в ответ на потребность большей полосы пропускания;
• разработка технических предложений с целью включения в стандарт;
• выработка процедур и методов тестирования продуктов различных поставщиков.
В настоящее время в альянс GEA входят более 100 компаний. Он обеспечивает связь между техническим комитетом по стандартизации IEEE 802.3 и производителями сетевого оборудования. Альянс увеличивает эффективность работы комитета и способствует более быстрому одобрению спецификаций стандарта 802.3z [25].
Архитектура стандарта Gigabit Ethernet
На рис. 7.22 показана структура уровней Gigabit Ethernet. Как и в стандарте Fast Ethernet, в Gigabit Ethernet не существует универсальной схемы кодирования сигнала, которая была бы идеальной для всех физических интерфейсов — так, с одной стороны, для стандартов 1000Base-LX/SX/CX используется кодирование 8В/10В [26], а, с другой стороны, для стандарта 1000Base-Т используется специальный расширенный линейный код TX/Т2 [27]. Функцию кодирования выполняет подуровень кодирования PCS, размещенный ниже средонезависимоro интерфейса GMII (gigabit media independent interface).
GMII интерфейс обеспечивает взаимодействие между уровнем МАС и физическим
уровнем, является расширение м интерфейса Mll и может поддерживать скорости 10, 100 и
1000 Мбит/с. Он имеет отдельные 8-разрядные приемник и передатчик и может поддержи вать как полудуплексный, так и дуплексный режимы. Кроме этого, GMII интерфейс несет один сигнал, обеспечивающий синхронизацию, и два сигнала состояния линии — первый указывает наличие несущей, а второй — отсутствие коллизий, и еще.несколько других сигнальных линий и питание. Трансиверный модуль, охватывающий физический уровень и обеспечивающий один из физических средозависимых интерфейсов, может подключаться, например, к коммутатору Gigabit Ethernet посредством GMII интерфейса.
Подуровень физического кодирования PCS. При подключении интерфейсов группы 1000Base-Х подуровень PCS использует блочное избыточное кодирование 88/10В, заимствованное из стандарта ANSI XЗT11 Fibre Channel. Аналогично рассмотренному стандарту FDDI, только на основе более сложной кодовой таблицы, каждые 8 входных битов, предназначенных для передачи на удаленный узел, преобразовываются в 10-битные символы. Кроме этого, в выходном последовательном потоке присутствуют специальные контрольные 10-битные символы, например, используемые для расширения носителя (дополняют кадр Gigabit Ethernet до его минимально размера 512 байт).
При подключении интерфейса 1000Base-T подуровень PCS осуществляет специальное помехоустойчивое кодирование для обеспечения передачи по витой паре UTP Cat.5 на расстояние до 100 м — линейный код ТХ/Т2, разработанный компанией Level One Communications [28, 29].
сигнала состояния линии — наличие
несущей и отсутствие коллизий — генерируются этим подуровнем. 
Подуровни PMA и PMD. Физический уровень Gigabit Ethernet использует несколько интерфейсов, включая традиционную витую пару категории 5, а также многомодовое и одномодовое волокна.
Подуровень PMA преобразует параллельный поток символов от PCS в последовательный поток, а также выполняет обратное преобразование (распараллеливание) входящего последовательного потока от PMD.
Подуровень PMD определяет оптические/электрические характеристики физических сигналов для разных сред. Всего определяются 4 различных типа физических интерфейсов среды, которые отражены в спецификациях стандарта 802.3z (1000Base-X) и 802.3ab (1000Base-Т), (рис. 7.23).
1OOOBase-Х. 1000Base-X основывается на стандарте физического уровня Fibre Channel — технологии взаимодействия рабочих станций, суперкомпьютеров, устройств хранения и периферийных узлов. Fibre Channel имеет 4-уровневую архитектуру. Два нижних уровня FC-0 (интерфейсы и среда) и FC-1 (кодирование/декодирование) перенесены в Gigabit Ethernet. Поскольку Fibre Channel является одобренной технологией, то такое перенесение значительно сократило время на разработку оригинального стандарта Gigabit Ethernet.
Блочный код 8В/10В аналогичен коду 4В/5В, принятому в стандарте FDDI. Однако код 4В/5В был отвергнут в Fibre Channel, потому что этот код не обеспечивает баланса по постоянному токуз. Отсутствие баланса потенциально может привести к зависящему от передавае- мых данных нагреванию лазерных диодов, поскольку передатчик может передавать больше битов 1 (излучение есть), чем 0 (излучения нет), что может быть причиной дополнительных ошибок при высоких скоростях передачи.
1000Base-X подразделяется на три физических интерфейса, основные характеристики которых приведены ниже [30]:
• 1000Base-SX — определяет лазеры с допустимой длиной излучения в пределах диапазона 770-860 нм, мощность излучения передатчика в пределах от -10 до 0 дБм, при отношении ON/OFF (сигнал / нет сигнала) не меньше 9 дБ. Чувствительность приемника— 17 дБм, насыщение приемника 0 дБм;
• 1000Base-LX — определяет лазеры с допустимой длиной излучения в пределах диапазо- на 1270-1355 нм, мощность излучения передатчика в пределах от — 13,5 до — 3 дБм, при отношении ON/OFF (есть сигнал / нет сигнала) не меньше 9 дБ. Чувствительность приемника — 19 дБм, насыщение приемника — 3 дБм;
• 1000Base-CX — экранированная витая пара (STP ""twinax") на короткие расстояния.
Для справки в табл. 7.9 приведены
основные характеристики оптических приемопередающих модулей, выпускаемых фирмой
Hewlett Packard для стандартных интерфейсов 1000Base-SX (модель HFBR-5305, Х =
850) и 1000Base-0( (модель HFCT-5305, Х = 1300). 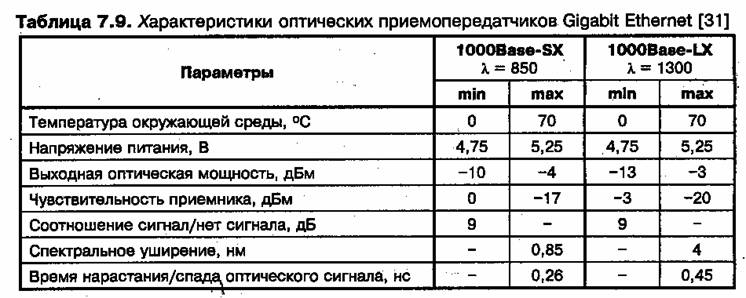
з Хотя сам код 4В/5В не обеспечивает баланса по постоянному току, в стандарте FDDI предусмотрен специальный дополнительный узел, поддерживающий баланс по постоянному току с дрейфом в пределах + 10%. При использовании кода 8В/10В необходимость в таком узле отпадает, и при этом полностью отсутствует дрейф постоянной составляющей.
Поддерживаемые расстояния для
стандартов 1000Base-Х приведены в табл. 7.10. 
При кодировании 8В/10В битовая скорость в оптической линии составляет 1250 бит/с. Это означает, что полоса пропускания участка кабеля допустимой длины должна превышать 625 МГц. Из табл. 7.10 видно, что этот критерий для строчек 2-6 выполняется. Из-за большой скорости передачи Gigabit Ethernet следует быть внимательным при построении протяженных сегментов. Безусловно, предпочтение отдается одномодовому волокну. При этом характеристики оптических приемопередатчиков могут быть значительно выше. Например, компания NBase выпускает коммутаторы с портами Gigabit Ethernet, обеспечивающими расстояния до 40 км по одномодовому волокну без ретрансляции — используются узкоспектральные DFB-лазеры, работающие на длине волны 1550 нм [32].
Особенности использования многомодовых ВОК В мире существует огромное количество корпоративных сетей на основе многомодово- го ВОК с волокнами 62,5/125 и 50/125. Поэтому естественно, что еще на этапе формирования стандарта Gigabit Ethernet возникла задача адаптации этой технологии для использования в существующих многомодовых кабельных системах. В ходе исследований по разработке спе- цификаций 1000Base-SX и 1000Base-И выявлена одна очень интересная аномалия, связанная с использованием лазерных передатчиков совместно с многомодовым -волокном.
Многомодовое волокно конструировалось для совместного использования со светоизлучающими диодами (спектр излучения 30-50 нс). Некогерентное излучение от таких светодиодов попадает в волокно по всей площади светонесущей сердцевины. В результате в волокне возбуждается огромное число модовых групп. Распространяющийся сигнал хорошо поддается описанию на языке межмодовой дисперсии. Эффективность использования таких светодиодов в качестве передатчиков в стандарте Gigabit Ethernet низкая в силу очень высокой частоты мо- дуляции — скорость битового потока в оптической линии равна 1250 Мбод, а длительность од- ного импульса — 0,8 нс. Максимальная скорость, когда еще используются светодиоды для пе- редачи сигнала по многомодовому волокну, составляет 622,08 Мбит/с (STM-4, с учетом избыточности кода 8В/10В, битовая скорость в оптической линии 777,6 Мбод).
Поэтому Gigabit Ethernet стал первым стандартом, регламентирующим использование лазерных оптических передатчиков совместно с многомодовым волокном. Площадь ввода излучения в волокно от лазера значительно меньше, чем размер сердцевины многомодового волокна. Этот факт сам по себе еще не приводит к проблеме. В то же время в технологиче- ском процессе производства стандартных коммерческих многомодовых волокон допускается наличие некоторых некритичных при традиционном использовании волокна дефектов (OTIGlo- нений в пределах допустимого), в наибольшей степени сосредоточенных вблизи оси сердце- вины волокна. Хотя такое многомодовое волокно полностью удовлетворяет требованиям стандарта, когерентный свет от лазера, введенный по центру такого волокна, проходя через области неоднородности показателя преломления, способен расщепиться на небольшое чис- ло мод, которые затем распространяются по волокну разными оптическими путями и с разной скоростью. Это явление известно как дифференциальная модоаая задержка DMD. В резуль тате появляется фазовый сдвиг между модами, приводящий к нежелательной интерференции на приемной стороне и к значительному росту числа ошибок (рис. 7.24 а). Этот эффект про- является только при одновременном стечении ряда обстоятельств: менее удачное волокно, менее удачный лазерный передатчик (разумеется, удовлетворяющие стандарту) и менее удачный ввод излучения в волокно. С физической стороны эффект DMD связан с тем, что энергия от когерентного источника распределяется внутри небольшого числа мод, в то время как некогерентный источник равномерно возбуждает огромное число мод. Исследования показывают, что эффект проявляется сильней при использовании длинноволновых лазеров (окно прозрачности 1300 нм) [33, 34].
Указанная аномалия в худшем случае может вести к уменьшению максимальной длины сегмента на основе многомодового ВОК. Поскольку стандарт должен обеспечивать 100- процентную гарантию работы, максимальная длина сегмента должна регламентироваться с учетом возможного проявления эффекта DMD.
Интерфейс 1000Base-LX. Для того, чтобы сохранить большее расстояние и избежать непредсказуемости поведения канала Gigabit Ethernet из-за аномалии, предложено вводить излучение не в центральную часть сердцевины многомодового волокна. Излучение из-за апертурного расхождения успевает равномерно распределиться по всей сердцевине волокна, сильно ослабляя проявление эффекта, хотя максимальная длина сегмента и после этого остается ограниченной (табл. 7.10). Специально разработаны переходные одномодовые оптические шнуры МСР (mode conditioning patch-cords), у которых один из соединителей (а именно тот, который планируется сопрягать с многомодовым волокном) имеет небольшое смещение от оси сердцевины волокна. Оптический шнур, у которого один соединитель — Duplex SC со смещенной сердцевиной, а другой — обычный Duplex $С, может называться так: МСР Duplex SC-Duplex SC. Разумеется, такой шнур не подходит для использования в традиционных сетях, например в Fast Ethernet, из-за больших вносимых потерь на стыке с МСР Duplex $С. Переходной шнур МСР может быть комбинированным на основе одномодового и многомодового волокон и содержать элемент смещения между волокнами внутри себя. Тогда одномодовым концом он подключается к лазерному передатчику. Что же касается приемника, то к нему может подключаться стандартный многомодовый соединитель
ный шнур. Использование
переходных МСР шнуров позволяет заводить излучение в многомодовое волокно через
область, смещенную на 10-15 мкм от оси (рис. 7.24 б) [35, 36]. Таким образом,
сохраняется возможность использования интерфейсных портов 1000Base-LX и с одномодовыми
ВОК, поскольку там ввод излучения будет осуществляться строго по центру
сердцевины волокна. 
Интерфейс 1000Base-SX. Так как интерфейс 1000Base-SX стандартизован только для использования с многомодовым волокном, то смещение области ввода излучения от цен- тральной оси волокна можно реализовать внутри самого устройства, и тем самым снять необ- ходимость использования согласующего оптического шнура.
10OOBase-Т — это стандарт Gigabit Ethernet передачи по неэкранированной витой паре категории 5 и выше на расстояния до 100 метров. Для передачи используются все четыре пары медного кабеля, скорость передачи по одной паре 250 Мбит/с. Предполагается, что стандарт будет обеспечивать дуплексную передачу, причем данные по каждой паре будут передаваться одновременно сразу в двух направлениях — двойной дуплекс (dual duplex) 1000Base-Т. Технически реализовать дуплексную передачу 1 Гбит/с по витой паре 0ТР са1.5 оказалось довольно сложно, значительно сложней, чем в стандарте 100Base-ТХ. Влияние ближних и дальних переходных помех от трех соседних витых пар на данную пару в четырех- парном кабеле требует разработки специальной скремблированной помехоустойчивой передачи, интеллектуального узла распознавания и восстановления сигнала на приеме. Несколько методов кодирования рассматриваются в качестве кандидатов на утверждение в стандарте 1000Base-Т, среди которых: 5-уровневое импульсно-амплитудное кодирование РАМ-5; квадратурная амплитудная модуляция QAM-25, и др. [37]. Ниже приведены кратко идеи РАМ-5.
Почему 5-уровневое кодирование? Распространенное 4-уровневое кодирование обра- батывает входящие биты парами. Всего существует 4 различных комбинации — 00, 01, 10, 11. Передатчик может каждой паре бит установить свой уровень напряжения передаваемого сиг- нала, что уменьшает в 2 раза частоту модуляции 4-уровневого сигнала, 125 МГц вместо 250 МГц, (рис. 7.25), и, следовательно, частоту излучения. Пятый уровень добавлен для соз- дания избыточности кода. В результате чего становится возможной коррекция ошибок на приеме. Это дает дополнительный резерв 6 дБ в соотношении сигнал/шум.
Для разработки спецификаций
этого стандарта создано отдельное подразделение Р802.3ab. Ожидаемый срок
появления этого стандарта — начало 1999 года. 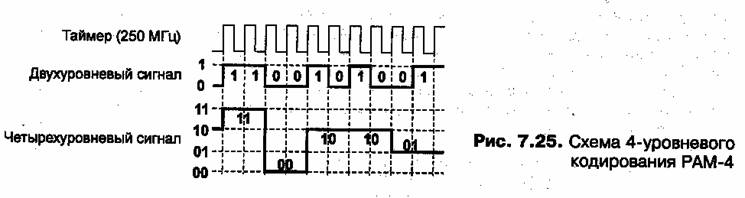
Уровень МАС
Уровень МАС стандарта Gigabit Ethernet использует тот же самый протокол передачи CSMA/CD, что и Ethernet и Fast Ethernet. Основные ограничения на максимальную длину cer- мента (или коллизионного домена) определяются этим протоколом.
В стандарте Ethernet IEEE 802.3 принят минимальный размер кадра 64 байта. Именно значение минимального размера кадра определяет максимальное допустимое расстояние между станциями (диаметр коллизионного домена). Время, в течение которого станция передает такой кадр — время канала — равно 512 ВТ или 51,2 мкс. Максимальная длина сети Ethernet определяется из условия разрешения коллизий, а именно время RTD, за которое сигнал доходит до удаленного узла и возвращается обратно, не должно превышать 512 ВТ (без учета преамбулы).
При переходе от Ethernet к Fast Ethernet скорость передачи возрастает, а время транс- ляции кадра длиной 64 байта соответственно сокращается — оно равно 512 ВТ или 5,12 мкс (в Fast Ethernet 1 ВТ = 0,01 мкс). Для того, чтобы можно было обнаруживать все коллизии до конца передачи кадра, необходимо удовлетворить одному из условий:
1. сохранить прежнюю максимальную длину сегмента, но увеличить время канала (и, следовательно, увеличить минимальную длину кадра);
2. сохранить время канала (прежний размер кадра), но уменьшить максимальную длину сегмента.
В Fast Ethernet был оставлен такой же минимальный размер кадра, как в Ethernet. Это сохранило совместимость, но привело к значительному уменьшению диаметра коллизионного домена.
В силу преемственности стандарт Gigabit Ethernet должен поддерживать те же минимальный и максимальный размеры кадра, которые приняты в Ethernet и Fast Ethernet. Но по- скольку скорость передачи возрастает, то соответственно, уменьшается и время передачи пакета аналогичной длины. При сохранении прежней минимальной длины кадра это привело бы к уменьшению диаметра сети, который не превышал бы 20 м, что могло быть мало полез- ным. Поэтому при разработке стандарта Gigabit Ethernet было принято решение увеличить время канала. В Gigabit Ethernet оно составляет 512 ВТ и в 8 раз превосходит время канала Ethernet и Fast Ethernet. Но, чтобы поддержать совместимость со стандартами Ethernet и Fast Ethernet, минимальный размер кадра не был увеличен, а было добавлено к кадру дополнительное поле, получившее название "расширение носителя" (carrier extension).
Расширение носителя Символы в дополнительном поле обычно не несут служебной информации, но они за- полняют канал и увеличивают "коллизионное окно". В результате коллизия будет регистриро- ваться всеми станциями при большем диаметре коллизионного домена.
Если станция
желает передать короткий (меньше 512 байт) кадр, то при передаче добавляется
это поле — расширение носителя, дополняющее кадр до 512 байт. Поле
контрольной суммы вычисляется только для оригинального кадра и не распространяется
на поле расширения. При приеме кадра поле расширения отбрасывается. Поэтому
уровень LLC даже и не знает о наличии поля расширения. Если размер кадра равен
или превосходит 512 байт, то поле расширения носителя отсутствует. На рис. 7.26
показан формат кадра Gigabit Ethernet при использовании расширения носителя. 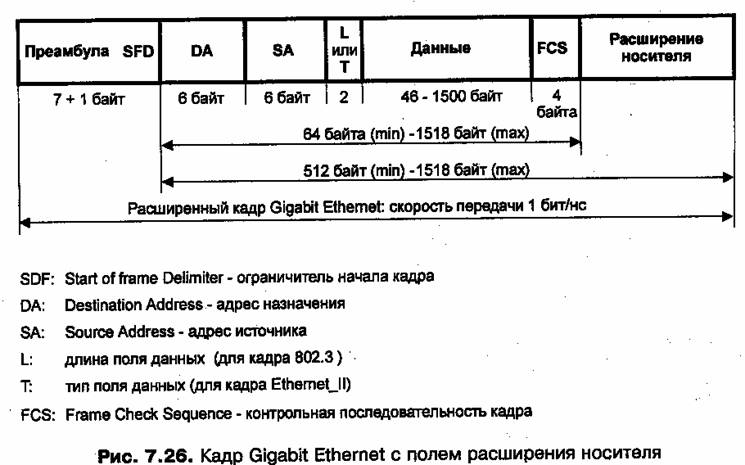
Пакетная перегруженность
Расширение
носителя — это наиболее естественное решение, которое позволило сохра- нить
совместимость со стандартом Fast Ethernet и такой же диаметр коллизионного
домена. Но оно привело к излишней трате полосы пропускания. До 448 байт
(512-64) может расходо- ваться вхолостую при передаче короткого кадра. На
стадии разработки стандарта Gigabit Ethernet компанией NBase Communications
было внесено предложение по модернизации стандарта. Эта модернизация,
получившая название пакетная перегруженность (packet burst- ing),
позволяет эффективней использовать поле расширения. Если у станции/коммутатора
имеется несколько небольших кадров для отправки, то первый кадр дополняется
полем расширения носителя до 512 байт, и отправляется. Остальные кадры
отправляются вслед с ми- нимальным межкадровым интервалом в 96 бит, с одним
важным исключением — межкадровый интервал заполняется символами расширения
(рис. 7.27 а). Таким образом, среда не замолкает между посылками коротких
оригинальных кадров, и ни какое другое устройство сети не может вклиниться в
передачу. Подобное пристраивание кадров может происходить до тех пор, пока
полное число переданных байт не превысит 1518. Пакетная перегруженность
уменьшать вероятность образования коллизий, поскольку перегруженный кадр может
испытать коллизию только на этапе передачи первого своего оригинального кадра,
включая рас- ширение носителя, что безусловно увеличивает производительность
сети, особенно при больших нагрузках (рис. 7.27 6). 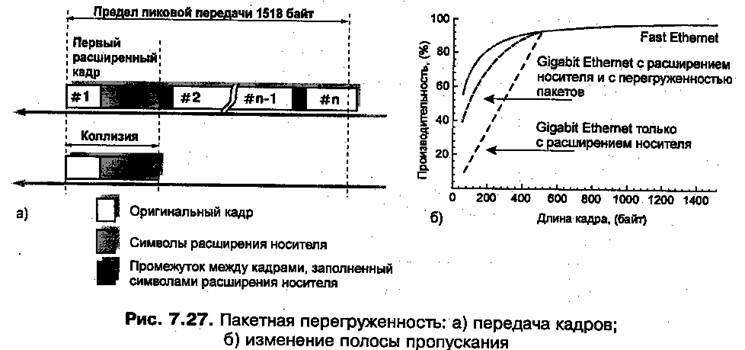
Типы устройств
В настоящее время поставляется полный перечень сетевых продуктов Gigabit Ethernet: сетевые карты, повторители, коммутаторы, а также маршрутизаторы. Предпочтение отдается устройствам с оптическим интерфейсами (1000Base-FL, 1000Base-SX) Duplex SC. Появление устройств с интерфейсом 1000Base-Т на UTP cat.5 с протяженностью сегментов до 100 м ожидается в начале 1999 года.
Сетевая карта Gigabit Ethernet. Выпускают сетевые карты на шины PCI, SBus и др. Ниже приведены основные технические характеристики сетевой карты G-NIC, выпускаемой фирмой Packet Engines [38]:
1. 64/32-разрядный PCI-мастер адаптер обеспечивает на частоте 33 МГц пропускную способность 2 Гбит/с.
2. Два независимых процессора, ответственных за прием и передачу пакетов, существенно разгружают центральный процессор рабочей станции. 3. Поддержка стандартов IEEE 802.3х дуплексной передачи и IEEE 802.3z обеспечивает максимальную совместимость с другими устройствами. Поставляются драйверы для операционных систем: Windows 95 (NDIS3); Windows NT (NDIS4, NDIS5, Intel и DEC Alpha процессоры); Novell NetWare (001 3.12 или выше); Solaris (2.5х, PCI и SBus); DEC UNIX (4.3 BSD); SGI IRIX (5.3 и 6.2); HP-UX (10.20); Linux; FreeBSD. Буферный повторитель. Устройства Ethernet поддерживают дуплексный режим как на физическом уровне, так и на уровне MAC. Традиционные повторители с портами RJ-45 (10Base-Т, 100Base-ТХ), хотя и имеют дуплексную связь на физическом уровне, из-за логической топологии шины внутри себя могут поддерживать только полудуплексный режим, и поэтому создается коллизионный домен ограниченного диаметра. Хотя в стандарте Gigabit Ethernet допускается использование традиционных повторителей, представляется более эффективным применение нового устройства — буферного повторителя. Протокол CSMA/CD реализует метод доступа к сети, но не к сегменту. Буферный повторитель — это многопортовое устройство с дуплексными каналами связи (рис. 7.28). Каждый его порт имеет входной и выходной буферы. Удаленное устройство, подключенное к повторителю, также должно под- держивать дуплексную связь на физическом и МАС уровнях. Очередной кадр, прибывая на входной порт, размещается в очереди входного буфера порта и далее пересылается в выходные буферы остальных портов (за исключением выходного буфера этого порта). Внутри повторителя отрабатывается протокол САМА/CD, на основе которого кадры из входных буферов переходят в выходные буферы других портов.
Поскольку в сегментах нет
коллизий, ограничения на их длину могут возникать только из-за физических
характеристик кабельной системы. В этой связи ВОК представляется более
перспективным, чем витая пара, ограниченная длиной 100 м. 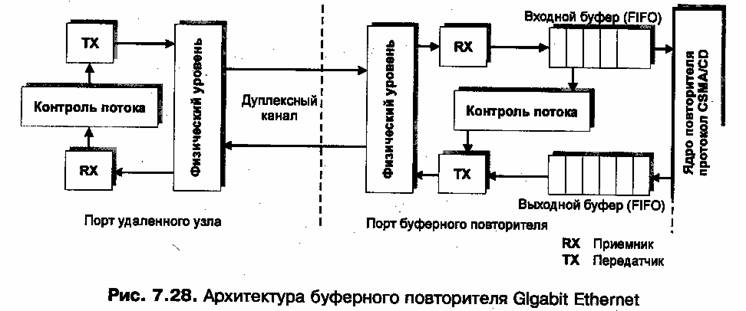
Удаленный узел, передавая серию кадров, способен переполнить входной буфер порта повторителя, что может привести к потере кадров. Во избежании этого стандартизован основанный на кадрах контроль потока, известный как 802.3х. Протокол работает на уровне МАС и предназначен для использования в дуплексных линиях.
Буферный повторитель обеспечивает дуплексную связь как и коммутатор, но он не такой дорогой, поскольку является просто расширением традиционного повторителя.
Коммутаторы. Перечислим наиболее важные черты коммутаторов Gigabit Ethernet:
• поддержка дуплексного режима по всем портам;
• поддержка контроля потока, основанного на кадрах IEEE 802.3х;
• наличие портов или модулей для организации каналов Ethernet, Fast Ethernet;
• поддержка физического интерфейса на одномодовом ВОК;
• возможность коммутации уровня 3;
• поддержка механизма QoS и протокола RSVP;
• поддержка стандарта IEEE 802.1q для организации виртуальных сетей.
Производители оборудования Gigabit Ethernet. Крупнейшими производителями обо- рудования Gigabit Ethernet являются компании: 3Com, Acacia Networks, Alteon Networks, AN- COR, Cabletron, Cisco Systems, Essential Communications, Foundry Networks, GigaLabs, Hewlett Packard, NBase Communications, Packet Engines, Rapid City Communications, XLNT Corp. [39j.
7.8. Миграция Ethernet к магистральным сетям
Основные сценарии наращивание сетей до Gigabit Ethernet. Ниже рассмотрены три основных сценария: подключение серверов по каналам Gigabit Ethernet, замена канала связи Fast Ethernet между коммутаторами на канал Gigabit Ethernet, замена магистральной коммутации Fast Ethernet на Gigabit Ethernet.
Подключение
серверов по каналам Gigabit Ethernet. Заменяется сетевая карта в файл-
сервере, а в коммутатор устанавливается Gigabit Ethernet модуль (рис. 7.29).
При этом дуп лексный канал может обеспечить расстояние по многомодовому волокну
до 550 м, по одномодовому волокну — и до нескольких десятков км, и в
перспективе по витой паре UTP Cat.5— до 100 м (табл. 7.10). Функция контроля потока 802.3х при необходимости предотвратит пе- реполнение буферов коммутатора со
стороны потоков от файл-сервера. 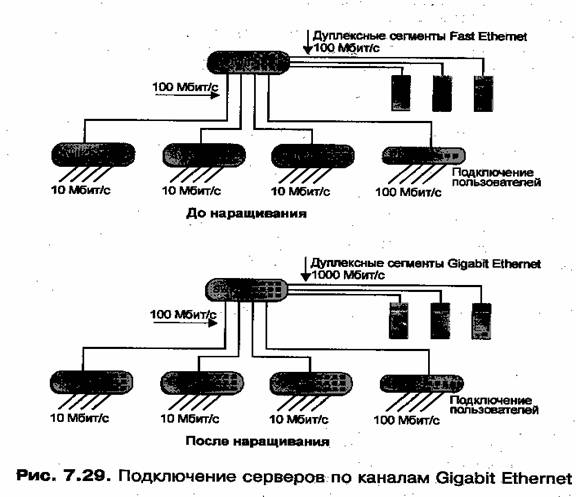
Замена канала связи Fast Ethernet между коммутаторами на канал Gigabit Ethernet. Увеличение пропускной способности и устранение узкого места может быть выполнено путем установки в коммутаторы по одному модулю Gigabit Ethernet (рис. 7.30). Поддержка коммутаторами протокола 802.1С}, а также возможности коммутации третьего уровня позволят создавать распределенные виртуальные сети.
Замена магистральной коммутации Fast Ethernet на Gigabit Ethernet. Наилучшим образом для обеспечения наращиваемости сети на центральном узле подходит модульный коммутатор, допускающий установку как модулей с N портами 10/100 Мбит/с (N=8-16), так и модулей с М портами 1000 Мбит/с (М = 4-8). В коммутаторах для рабочих станций следует предусмотреть слот для подключения (при наращивании) Gigabit Ethernet up-link модуля. Таким образом, на первом этапе можно строить сеть с коммутацией Fast Ethernet, а позже произвести ее наращивание путем установки соответствующих коммутационных модулей Gigabit Ethernet в магистральный коммутатор и коммутаторы рабочих групп (рис. 7.31).
В заключении кратко рассмотрим некоторые дополнительные аспекты построения магистральных сетей: коммутацию, основанную на кадрах (IEEE 802.3х); виртуальные сети; тегкоммутацию (IEEE 802.1Q); протокол RSVP и др.
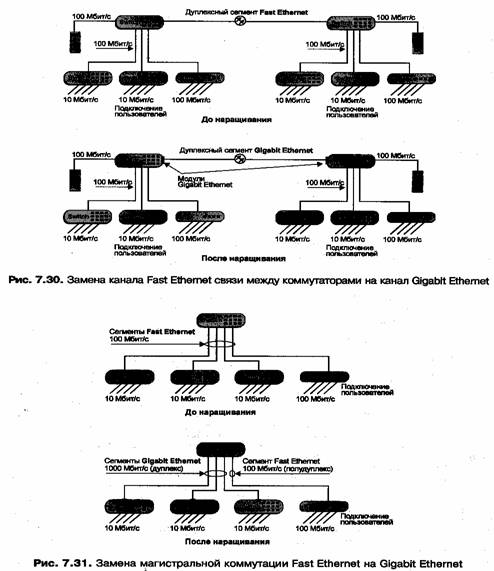
Эволюция методов контроля потока. На рис. 7.32 а показана простейшая сеть с по- вторителем Ethernet. Поскольку такая сеть (возможно, с несколькими повторителями) представляет один коллизионный домен, то ей присущи следующие два вытекающих из этого свойства: во-первых, диаметр сети должен быть ограничен на основании расчета времени RTD, во-вторых, число рабочих станций, ведущих одновременную передачу не должно превышать 15-25, а соответственно полное число пользователей в зависимости использования ресурсов сети не должно превышать 50-100 на коллизионный домен. При таких условия в се- ти Ethernet не будет происходить потерь кадров на уровне МАС, а сама сеть будет работать вполне стабильно. Данное решение не способно устроить крупные организации, тем более магистральные сети.

Дальнейшее наращивание сети возможно только с использованием коммутатора (рис. 7.32 б). Коммутатор обеспечивает микросегментацию сети, улучшая ее работу как пр использовании одноранговых приложений, так и при использовании приложений клиенТ сервер; при этом скоростной канал Fast Ethernet с сервером имеет преимущества пере, Ethernet, так как в приложениях клиент-сервер канал связи с сервером, если он был бы ни:. коскоростной, мог оказаться "бутылочным горлышком" сети. Однако коммутатор может пр~ водить к потери кадров в случае переполнения своих буферов. Потери кадров в небольши сетях не опасны (благодаря проколам уровня сессий повторная отправка кадра произойдет короткие сроки) и маловероятны, поскольку контроль потока на основе протоколов более вь сокого уровня позволяет оптимизировать скорость передачи до того, как начнут переполнять ся буферы коммутатора. Это требует достаточной буферной емкости. В крупных сетях большим числом пользователей и большие буферы могут не спасти. Потери кадров в протя женных и крупных сетях не желательны, поскольку на повторную отправку кадра уходит значи тельно больше времени, что приводит к замедлению работы сети. Безусловно, лучшим реше нием был бы контроль потока на канальном уровне, в пределах стандарта Ethernet, как это реализовано в сети с одним коллизионным доменом. Контроль потока был бы еще более эф фективным, если бы он осуществлялся между соседними устройствами (особенно в крупны; корпоративных сетях). Именно для этой цели и был разработан механизм обратного давление (см. п. 7.2). Но он требует полудуплексного режима передачи в сегментах своих портов, по скольку использует свойства протокола CSMA/CD, и не способен работать на дуплексных ли ниях связи.
Вто же время только дуплексный Ethernet позволяет увеличить пропускную способность и обеспечить протяженные сегменты на основе оптического волокна (рис. 7.32 в). Именно для дуплексных каналов "точка-точка" был разработан основанный на кадрах контроль потока (стандарт IEEE 802.3x) — протокол, работающий на уровне МАС. В стандарте Gigabit Ethernet он становится неотъемлемой чертой выпускаемых коммутаторов, буферных повторителей и сетевых карт. Поддержка стандарта 802.3х становится крайне желательной при разработке новых магистральных коммутаторов с портами Fast Ethernet и Ethernet. Подключение рабочих станций к выделенным портам коммутатора по дуплексным каналам, а не через повторитель, более эффективно для организации видеоконференций, компьютерной телефонии и мульти- медиа приложений.
Виртуальные сети. Виртуальной сетью VLAN (virtual LAN) называется логически объединенная группа пользователей сети, в противоположность их физическому объединению, основанному на территориальном признаке и топологии сети. Технологии VLAN наиболее широко используются в коммутируемых сетях, хотя и не исключается применение маршрутизаторов. Объединение пользователей в виртуальные сети может происходить на основе портов, адресов или протоколов.
Основанная на портах виртуальная сеть — наиболее простой способ группирования сетевых устройств. Все удаленные устройства, приписанные к определенным портам коммутатора, независимо от их адресов, протоколов, приложений объединяются в одну виртуальную сеть.
Основанная на адресах виртуальная сеть может поддерживать несколько виртуальных сетей на одном коммутируемом порту. Устройства выделяются в подсети на основе их адресов (обычно МАС-адресов).
Основанная на протоколах виртуальная сеть объединяет в различные логические группы сетевые устройства на основе протоколов IP, IPX и т.д. Устройства, выполняющие такую функцию, обычно работают не на канальном уровне, а на сетевом, и называются маршрутизаторами. Устройства, способные работать с несколькими протоколами, называются мультипротокольными маршрутизаторами.
Построение
виртуальных сетей, основанных на портах, долгое время ограничивалось
использованием только одного коммутатора в сети, а решения с несколькими
коммутаторами были нестандартными. В настоящее время близится к завершению
разработка стандарта IEEE 802.1Q, позволяющего строить распределенные
виртуальные сети с несколькими коммутаторами. Основой будущего стандарта
является тег-коммутация (tag switching) [40]. При пе- редаче кадров
между коммутаторами (как для одноадресных, так и для широковещательных)
используется специальный теговый формат — добавляются поля, общим объемом 2
байта: идентификатор виртуальной сети (12 бит); поле приоритета (3 бита) и поле
инкапсуляции TR (1 бит). При передаче кадра от станции А к станции В коммутатор
1 добавляет в указанные поля информацию о виртуальной сети (рис. 7.33). На
основании этой информации коммута- тор 2 сначала определяет, что кадр
предназначен для виртуальной сети V1, затем устраняет эту информацию — самим
станциям в пределах виртуального домена она не нужна — и уже на основании
МАС-таблицы для виртуальной сети V1 коммутирует кадр в порт для станции В. 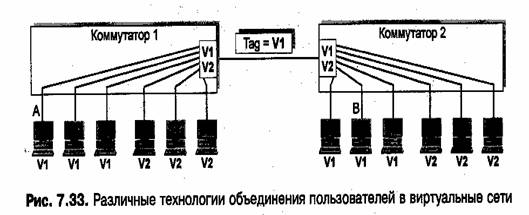
Принятие стандарта IEEE 802.1Q позволит разработчикам локальных сетей использовать дополнительные полезные возможности:
• МАС Address Tagging — приписываемая тегинформация зависит от МАС-адреса назначения;
• Frame Type Tagging — приписываемая информация зависит от протоколов более высокоro уровня (например, от!Р или IPX);
• Layer 3 Tagging — приписываемая информация зависит от установленных IP подсетей;
• Policy-based Tagging — приписываемая информация чувствительна к различным параметрам окружающей обстановки, например, времени суток.
Протокол IEEE 802.1Q после его стандартизации будет использоваться в стандарте Gi- gabit Ethernet. Многие компании уже выпускают коммутаторы Gigabit Ethernet, поддерживающие еще не окончательно сформированные спецификации IEEE 802.1Q.
Протокол RSVP. В современных сетях роль приложений реального времени существенно возросла. Локальные сети, первоначально задумывающиеся исключительно для передачи данных, сегодня широко используются для передачи мультимедиа приложений. Набирают темпы компьютерная телефония и видеоконференцсвязь. В связи с этим более остро встает вопрос минимизации задержек и регуляризации трафика на узлах коммутации и маршрутизации сети Internet. Протокол RSVP (Resource ReserVation Protocol) призван обеспечить необходимое качество обслуживания для полноценной эксплуатации таких приложений. RSVP разработан для работы с протоколом ТСР/IP, который является основным для сети Internet.
Оконечный узел на основе протокола RSVP запрашивает у сети определенное качество обслуживания QoS (Quality of Service), необходимое для данного приложения. С целью резервирования необходимых ресурсов, RSVP переносит запрос по сети, обращаясь к каждому узлу, через которые предполагается осуществлять передачу потока данных.
Для резервирования на отдельном узле коммутации/маршрутизации специальная программа — демон RSVP — обращается к двум модулям принятия решения: к модулю управления доступом и к административному модулю (рис. 7.34 а). Модуль управления доступом определяет, достаточно ли ресурсов на узле, чтобы удовлетворить запрос QoS. Административный модуль выявляет, имеет ли пользователь административное разрешение выполнить резерви- рование. Если хотя бы одна из проверок не дает положительного результата, программа RSVP возвращает на запрашивающий удаленный узел уведомление об ошибке, тем самым отвечая отказом. Если обе проверки положительные, то демон RSVP устанавливает в соответствие с запросом QoS параметры в классификаторе пакетов и планировщике пакетов. Классификатор пакетов определяет класс QoS для каждого пакета, а планировщик пакетов уста- навливает порядок движения пакетов, чтобы обеспечить обещанную полосу пропускания на узле.
Важная особенность RSVP — его масштабируемость до очень больших групп с многоадресной доставкой пакетов, поскольку он использует ориентированные на приемный узел запросы, которые сливаются по мере их прохождения по многоадресному дереву. Запрос на резервирование канала посылает не узел, собирающийся вести многоадресную трансляцию, а каждый из узлов-получателей. Нет необходимости сигналу резервирования следовать по всему дереву до передающего узла, вместо этого сигнал идет только до ближайшего узла, сливаясь с подобными сигналами от других ветвей (рис. 7.34 б). Хотя протокол RSVP разработан для использования преимущественно в многоадресных приложениях, он может также служить для передачи кадров, имеющих один адрес.
RSVP также разработан с целью увеличения надежности
существующих алгоритмов маршрутизации в сети Internet. RSVP не осуществляет
свою собственную маршрутизацию, вместо этого он использует лежащие в его основе
протоколы маршрутизации, чтобы определить, каким образом следует обеспечивать
передачу зарезервированного потока данных. Если маршрутизаторы перенаправляют
движения потоков, подстраиваясь под изменяющуюся топологию сети, RSVP
привязывает свои резервирования к новым путям независимо от того, действует ли
уже данное резервирование или нет. 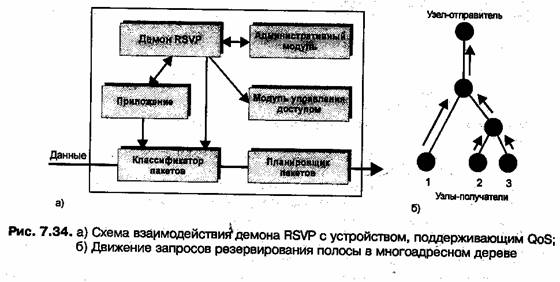
Технологии Ethernet и АТМ в магистральных сетях.
Охватывая более высокие уровни модели OSI, протоколы RSVP и IEEE 802.1Q не относятся к стандарту Ethernet, но делают значительно более эффективным его использование, в особенности использование стандарта Gigabit Ethernet в ранге магистральных сетей. Главное отличие контроля качества QoS на основе RSVP от QoS, реализованного в технологии АТМ, заключается в том, что RSVP рассчитан на работу в дейтаграммных сетях и не требует наличия виртуальных каналов. Потенциально сегодня АТМ предоставляет более разнообразные возможности по QoS по сравнению с другими сетевыми технологиями. Однако на практике возможности манипуляции функцией QoS, одной из блестящих черт АТМ, в рамках конкретных приложений очень скудны, и не предвидится существенный прогресс в этой области. Очерчены предварительные спецификации будущего стандарта 10G Ethernet (скорость передачи 10 Гбит/с), начало поставок оборудования планируется в 2001 году [41]. Таким образом, стандарт Ethernet с масштабируемой иерархи- ей 10/100/1000/... становится мощной сетевой технологией, жестко конкурирующей с ATM как на уровне корпоративных, так и магистральных сетей.