Среди знаковых явлений, сформировавших в совокупности облик информационной революции конца двадцатого столетия, одна из приоритетных позиций принадлежит возникновению и повсеместному распространению массового телекоммуникационного сервиса. Системы мобильной и персональной радиосвязи, долгие годы, находившиеся под монопольным контролем ограниченного и довольно специфического круга пользователей, обрели статус общедоступных. Наряду с другими средствами высокоскоростной транспортировки сообщений (кабельные, радиорелейные, волоконно-оптические, спутниковые линии связи), а также глобальной сетью Internet они кардинально изменили информационную инфраструктуру стран и континентов.
Незамедлительной и
адекватной была и реакция на подобные реалии мирового образовательного
сообщества, а также интернационального книжного рынка. В учебных программах
университетов и колледжей появились многочисленные дисциплины, отражающие
передовые достижения и перспективы развития массовых телекоммуникаций, а ведущие
американские и европейские издательства буквально обрушили на читателя лавину
книг, посвященных философии и дизайну систем мобильной и персональной связи. За
подтверждением сказанного достаточно обратиться к перечням печатной продукции
лишь некоторых признанных лидеров в сфере выпуска научно-образовательной
литературы. Так, в 2001 — 2002 гг. в издательстве John Wiley & Sons вышло
более 30 книг по названной тематике общим объемом более 12 тыс. страниц. В
планах издательства до первого квартала
Не столь радужной представляется ситуация с книгоизданием на русском языке. Число и доступность отечественных печатных источников, освещающих текущее и прогнозируемое состояние мобильных телекоммуникаций, явно не отвечают стремительным темпам возрастания социально-технологической роли последних в современной России. В то время как по уровню проникновения сотовых систем российские мегаполисы (Москва, Санкт-Петербург) и некоторые другие регионы уверенно выходят на вполне европейский уровень, ощущающийся дефицит книг профессионального характера не может не вызвать озабоченности у всех, кто по роду своей деятельности причастен к упомянутой сфере.
Особо чувствительна нехватка изданий, которые потенциально могли бы лечь в основу программ соответствующих вузовских дисциплин. Естественно, что большинство российских вузов, готовящих специалистов радиотехнического профиля, оперативно откликнулись на кардинальные сдвиги в телекоммуникационной системотехнике, модернизировав учебные планы, обогатив преподаваемые предметы новыми разделами и предложив широкий спектр принципиально новых курсов. В этом свете коренным интересам как студентов, так и преподавателей отвечал бы выпуск пособий, отражающих подобные учебно-методические разработки. Ограничение публикаций этого профиля исключительно внутри вузовскими рамками сдерживает процесс взаимной ассимиляции опыта научно-педагогических коллективов и не отвечает духу творческой состязательности, традиционно присущему высшей школе. Руководствуясь названными мотивами, авторы предлагают читателю книгу, вобравшую в себя те материалы читавшихся ими в последние годы курсов, которые в смысловом отношении концентрируются в категорию "мобильная связь".
Разумеется, компактный формат издания не оставляет простора для излишней детализации и попыток создать нечто само достаточное. Авторы в значительной мере вынуждены опираться на сведения, получаемые студентами из предшествующих или параллельных курсов, нередко отсылая читателя к другим источникам. В то же время хотелось бы надеяться, что книга принесет пользу в плане формирования системного взгляда на крае - угольные принципы и технологический фундамент мобильной связи, а, возможно, для кого-то послужит импульсом к более глубокому знакомству с предметом и самостоятельному поиску.
Несмотря на приоритетное учебное предназначение книги, можно полагать, что интерес к ней проявят и вполне сформировавшиеся специалисты, проектировщики и научные работники, поскольку даже самому искушенному эксперту приходится время от времени сверяться с литературой и регенерировать в памяти ту или иную информацию.
Названия разделов книги (см. Оглавление) достаточно прозрачны и конкретны, так что авторы сочли нецелесообразным занимать внимание читателя обзором содержания глав, столь характерным для предисловий.
Работая в постоянном контакте и оперативном взаимодействии, авторы, тем не менее, имели свои зоны ответственности. В.П. Ипатовым осуществлено общее редактирование книги, а также написаны главы 4 и 12. Главы 3, 6 и 10 написаны В.К. Орловым, 2, 5 и 11 — И.М. Самойловым, 1, 7, 8, 9 — В.Н. Смирновым.
Сознавая, что возможные издержки и недочеты книги могут послужить предметом критики, авторы с благодарностью отнесутся к замечаниям и предложениям читателей и откликнутся на любое приглашение к дискуссии профессионального характера.
Выполняя приятный долг, авторы выражают искреннюю признательность всем преподавателям и сотрудникам кафедры радиосистем Санкт-Петербургского Государственного электротехнического университета "ЛЭТИ", сумевшим в нелегкие переломные времена сохранить атмосферу творческого азарта, высокого профессионализма, бескорыстного служения делу воспитания научно-инженерной молодежи.
Рецензентами книги: профессором В.Э. Гуревичем и кафедрой радиосистем Новгородского Госуниверситета им. Ярослава Мудрого (зав. кафедрой профессор Л.А. Рассветалов) сделан ряд полезных и конструктивных замечаний, с благодарностью учтенных авторами.
Стратегической целью развития современных общедоступных телекоммуникаций является предоставление высококачественной связи любому потребителю в любое время в любой точке земного шара. В соответствии с этим Международной организацией по стандартизации (ISO — International Standards Organisation) разработана концепция глобальной сети связи общего пользования. Под сетью понимается множество взаимодействующих друг с другом систем, осуществляющих хранение, обработку и передачу разнообразной информации.
Глобальная сеть объединяет телефонные сети общего пользования, сети передачи данных, системы мобильной и спутниковой связи. Ею охватывается все многообразие пользовательских терминалов (проводные и бес шнуровые телефонные аппараты, персональные компьютеры, сотовые и спутниковые телефоны, аппараты факсимильной связи и пр.), линий связи (кабельных, оптических, беспроводных и т.д.), узлов коммутации (учрежденческих, районных, междугородних), систем управления, контроля и технического обслуживания. Для того чтобы составить адекватное представление о наиболее общих чертах и архитектуре столь сложного и разветвленного образования, разумно вписать его в рамки некоторой абстрактной модели, классифицирующей элементы сети по их функциональному назначению и механизмам взаимодействия.
1.1.
Понятие о модели взаимодействия открытых систем
Эта
эталонная модель OSI (Open Systems Interconnection), разработанная ISO,
обычно обозначается как модель ISO/OSI и является базовой в том смысле, что для
описания некоторых систем достаточна лишь часть ее компонентов. Несмотря на
существование конкурентоспособных альтернатив, модель OSI получила повсеместное
распространение и широко используется как концептуальная основа в информационной
системотехнике.
Под открытой системой понимается система, удовлетворяющая требованиям международных организаций (открыта де- юре) или требованиям производителя, контролирующего большую часть рынка сбыта (открыта де-факто). Открытость означает, что система не является чьей-то собственностью, т.е. любой производитель вправе создавать и выставлять на продажу собственный продукт (аппаратуру или программное обеспечение), предназначенный для практического доступа к услугам системы. Между производителями возникает конкуренция, что способствует снижению цены оборудования. Пользователи при этом не зависят от единственного производителя и могут менять поставщиков аппаратуры.
Диаграмма рис. 1.1 иллюстрирует схему взаимодействия элементов и уровней базовой модели, представленной в общем виде. Модель некоторых систем содержит лишь часть этих элементов. Так, системы с коммутацией каналов описываются одно уровневой моделью. Расшифруем используемые термины.
Прикладной процесс выполняет обработку данных для нужд пользователя либо с помощью некоторых аппаратно- программных средств, либо непосредственно в мозгу человека.
Под интерфейсом (стыком) понимается определенная стандартами граница между взаимодействующими объектами. Для систем мобильной связи главенствующее значение имеет радиоинтерфейс, охватывающий средства соединения между мобильной и базовой станциями.
Физические средства соединения — это совокупность аппаратуры и среды распространения, обеспечивающих передачу сигналов между системами.
Абонент через интерфейс пользователя дает задание прикладному процессу и получает результат его выполнения.
Областью взаимодействия называется иерархическая группа функциональных блоков, предназначенных для обмена данными между системами. В базовой модели эти функции поделены на семь расположенных друг над другом слоев, именуемых уровнями, как показано на рис. 1.1.
Такое деление позволяет разбить сложную систему на ряд более простых (осуществить декомпозицию), образовать стандартные модули и интерфейсы между уровнями. Отсылая читателя за деталями к [1], опишем кратко основные функции, закрепленные за каждым уровнем.

Верхний, седьмой уровень обеспечивает различные формы взаимодействия прикладных процессов, т.е. является прикладным интерфейсом. На этом уровне выполняется управление заданиями, идентификация пользователей по паролям, адресам,
электронным подписям.
На представительном уровне осуществляется кодирование сообщений, поступающих с седьмого уровня, в нужную форму. Здесь же при необходимости осуществляется сжатие данных и шифрование.
Сеансовый уровень определяет процедуру проведения сеансов между прикладными процессами, т.е. обеспечивает установку, поддержание и разрыв соединения.
Транспортный уровень отвечает за точность доставки пакетов (блоков данных по 500-2000 бит) по виртуальным каналам, проложенным между портами.
Сетевой уровень создает виртуальные каналы — пути, по которым данные передаются от одного порта к другому.
На канальном уровне производится формирование и передача кадров (блоков данных), обнаружение и исправление ошибок.
Физический уровень создает интерфейсы для подключения систем к физическим средствам соединения (электрическим и оптическим кабелям, радио эфиру вместе с аппаратурой пере дачи данных). Он отвечает за передачу последовательности бит, оповещает о появлении неисправностей и отказов (столкновении кадров, обрывов, отключении питания).
Хотя все сообщения передаются через первый — физический — уровень, в модели OSI определены также логические каналы, понимаемые как пути, по которым передаются сигналы или данные между одноименными уровнями. Так, путь, связывающий четвертые уровни, называется транспортным каналом, путь между третьими — сетевым, вторыми — информационным; и, наконец, собственно физическим каналом называется путь, соединяющий первые уровни. Особое место занимает логический канал трафика (пользовательский канал), обеспечивающий обмен данными между абонентами.
При технической реализации систем логические каналы проектируются на физические, т.е. указывается, какой физический канал в данный момент выделяется для организации конкретного логического канала. Физические каналы и способы распределения их по логическим каналам описываются в гл. 10 и 11 на примере сотовых систем связи стандартов GSM и IS-95.
Эталонная модель обладает свойствами прозрачности и доступности сервиса.
Прозрачность означает, что данные, переданные с какого- то уровня на нижние, на приемной стороне возвращаются на этот же уровень без изменений. Создается видимость, что для рассматриваемых одноименных уровней нижних не существует — они прозрачны. Ярким примером прозрачного объекта может служить телефонный тракт. Большинство людей, пользующихся телефоном, даже не имеют представления о преобразованиях, которым подвергается их речь в телефонном канале.
Под доступностью сервиса понимается возможность использования всеми верхними уровнями услуг (сжатие данных, защита от помех, от несанкционированного использования информации), выполняемых на нижних уровнях.
На рис. 1.1 линиями, соединяющими одноименные уровни, обозначены протоколы — правила взаимодействия двух (или более) объектов. Названия протоколов совпадают с названиями соответствующих уровней, например, существуют сеансовые, транспортные, сетевые протоколы.
Протоколы должны удовлетворять определенным требованиям [2]. Прежде всего, протокол — это последовательность шагов, выполняемых взаимодействующими объектами добровольно в порядке строгой очередности для достижения поставленной цели. Далее, протокол должен содержать описание действий его участников при любых возникающих ситуациях (должны быть исключены тупиковые ситуации). Правила игры в шахматы, в шашки являются примерами протоколов.
Следует упомянуть о существовании криптографических протоколов, обеспечивающих достижение цели в условиях возможного мошенничества как со стороны законных пользователей, так и внешнего нарушителя. Примером такого протокола может служить аутентификация абонента, рассматриваемая в гл. 8.
Для описания систем мобильной связи базовая семиуровневая модель трансформируется путем деления на два укрупненных слоя [3, 4]. В стандартах GSM и TETRA верхние уровни с четвертого по седьмой образуют один слой, нижние (с первого по третий) — другой. При передаче речи функции седьмого и шестого уровней выполняет человек. В его мозгу зарождается сообщение, он выбирает язык общения. Задачи, решаемые на пятом и четвертом уровнях, важны для соединительных линий, объединяющих отдельные системы связи в единую сеть. Поэтому указанные системы описываются трехуровневой моделью, включающей лишь сетевой, канальный и физический уровни.
1.2.
Структура сетей мобильной связи
Основные, наиболее общие элементы сетей связи показаны на рис. 1.2. Они содержат мобильные станции (МС), базовые станции (БС), центры управления и коммутации (ЦК), радиоинтерфейс (РИ).

Мобильные станции используются подвижными абонентами. БС — стационарные приемопередающие станции, обеспечивающие радиосвязь с МС в определенной зоне (ячейке, соте, секторе). В ЦК выбирается направление передачи данных (коммутация), производится управление БС и осуществляется доступ к внешним системам.
Мобильные станции могут обмениваться информацией друг с другом либо через ЦК (рис. 1.2, а), либо непосредственно (рис. 1.2, б). Используя основные элементы, можно построить региональные и национальные сети (подсети) мобильной связи, структура которых в упрощенном виде показана на рис. 1.3. В качестве примера взята транкинговая сеть стандарта TETRA [4].
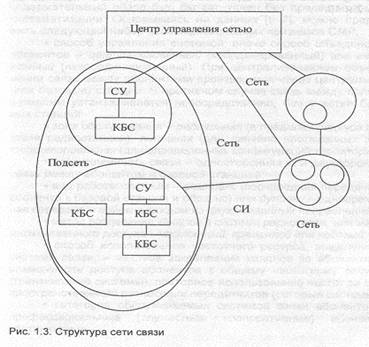
Отдельные сети и подсети объединяются в единую структуру с помощью межсетевых интерфейсов (СИ) — кабельных или радиолиний. Контроллеры базовых станций (КБС) выполняют функции коммутации, управления БС, обеспечивают доступ к внешним сетям (телефонным, передачи данных). Они могут подразделяться на главные (с расширенными возможностями) и подчиненные (с ограниченными функциями). Подсеть может содержать собственную станцию управления (СУ). Таким образом, функции управления и коммутации распределяются по всей сети, что обеспечивает быструю передачу вызовов и сохранение работоспособности сети при неисправностях отдельного оборудования.
Принципы взаимодействия МС, БС, КБС излагаются в гл. 2и10.
2. КЛАССИФИКАЦИЯ И ЭВОЛЮЦИЯ СИСТЕМ МОБИЛЬНОЙ РАДИОСВЯЗИ
2.1.
Основные типы систем мобильной связи
Современные системы мобильной радиосвязи (CMP) весьма разнообразны по спектру применений, используемым информационным технологиям и принципам организации. Поэтому их содержательный обзор был бы затруднен без предварительной систематизации. Основываясь на данных [5 — 7], можно предложить следующий набор классификационных признаков СМР:
• способ управления системой, иначе способ объединения абонентов — централизованным (координированный) или автономный (нескоординированный). При централизованном объединении связь между абонентами производится через центральные (или базовые) станции. В противном случае связь между пользователями устанавливается непосредственно, без участия базовых станций;
• зона обслуживания — радиальная (в пределах радиуса действия радиостанции), линейная (для линейно протяженных зон), территориальная (для определенных конфигураций территории);
• направленность связи — односторонняя или двусторонняя связь между абонентом и базовой станцией;
• вид работы системы — симплекс (поочередная передача от абонента к базовой станции и обратно) или дуплекс — одновременная передача и прием в каждом из двух названных направлений;
•
метод разделения каналов в системе радиосвязи, или метод множественного
доступа — частотный, временной или кодовый;
• способ использования частотного ресурса, выделенного системе связи, — жесткое закрепление каналов за абонентами, возможность доступа абонентов к общему частотному ресурсу (Транкинговые системы), повторное использование частот за счет пространственного разнесения передатчиков (сотовые системы);
• категория обслуживаемых системой связи абонентов— профессиональные (служебные, корпоративные) абоненты, частные лица;
• вид передаваемой информации — речь, кодированное сообщение и др.
Данный перечень не исчерпывает всех возможных система образующих признаков (можно упомянуть и такие, как диапазон используемых частот, вид модуляции сигналов, способ соединения системы связи с коммутируемой телефонной сетью общего пользования (ТРОП), число обслуживаемых абонентов и пр.), однако и его достаточно для демонстрации многообразия существующих СМР.
Учитывая распространенность существующих типов СМР, а также перспективы их развития, можно предложить следующую систему классификации СМР, основу которой составляют три из перечисленных ранее отличительных признака:
• назначение системы и размер зоны радиопокрытия;
• метод множественного доступа;
• схема дуплексирования каналов радиолинии.
В зависимости от назначения системы, объема предоставляемых услуг и размеров зоны обслуживания можно выделить следующие четыре типа СМР:
• Транкинговые системы связи (ТСС);
• системы персонального радиовызова (СПРВ);
• системы персональной спутниковой связи (СПСС);
• сотовые системы мобильной связи (ССМС).
По способу организации множественного доступа, т.е. технологии распределения между отдельными каналами связи частотно-временного ресурса, выделяют СМР на основе одной из трех конкурирующих технологий:
• множественный доступ с частотным разделением каналов
(МДЧР, англоязычная аббревиатура РОМА — frequency division multiple access);
• множественный доступ с временным разделением каналов (МДВР или ТОМА — time division multiple access);
• множественный доступ с кодовым разделением каналов (МДКР или СОМА — соде division multiple access).
Что же касается третьего признака классификации — дуплексирования каналов, то различие СМР состоит в способе организации информационного обмена в радиоканале двусторонней связи между абонентами либо между базовой станцией и абонентом. Наибольшее распространение находят системы с организацией дуплексной передачи на основе частотного и временного разделения.
Рассматриваемые ниже конкретные примеры помогут лучше понять смысл приведенной классификации и дадут некое предварительное представление о принципах построения СМР.
2.2.
Транкинговые системы связи
Термин "транкинговая" (или транковая) связь происходит от английского слова trunk (ствол) и отражает то обстоятельство, что "ствол связи" содержит несколько каналов, причем жесткое закрепление каналов за абонентами отсутствует. В литературе можно найти различные определения транкинговых систем, общим для которых является именно предоставление в распоряжение абонента одного из свободных на данный момент каналов. В частности, к данному классу относят:
• радиально — зоновые системы наземной мобильной радио- связи, использующие автоматическое распределение ограниченного частотного ресурса ретранслятора среди большого числа абонентов[8];
• системы массового применения, позволяющие при ограниченном частотном ресурсе обслуживать максимальное число абонентов [9].
Типичной сферой применения транкинговых систем являются государственные, ведомственные, корпоративные организации и институты, такие как служба скорой помощи, пожарная служба, охрана правопорядка, органы безопасности, различные коммерческие структуры и др. По большей части Транкинговые системы используются как средства оперативной связи с жестко лимитированным и постоянно контролируемым контингентом абонентов в пределах ограниченной территориальной зоны. Учитывая специфику применения транкинговых систем, их иногда называют профессиональными системами мобильной радиосвязи (PMR- Professional Mobile Radio), либо частными системами мобильной радиосвязи — Private Mobile Radio. Системы PMR, обеспечивающие соединение мобильных объектов с абонентами ТРОП, часто выделяются особо как Public Access Mobile Radio (PAMR).
Транкинговые системы связи (ТСС) могут строиться как системы с однозоновой или многозоновой структурой. Принимая во внимание специфический характер ТСС, т.е. ограниченность числа пользователей системы, переход от однозоновой к многозоновой структуре объясняется в первую очередь расширением географической зоны действия системы, а не стремлением к повышению числа абонентов (абонентской емкости) системы. При пересечении границ радиопокрытия ТСС отслеживают перемещение абонентов, обеспечивают их регистрацию и назначение им нового частотного канала. Однако, как правило, подобный переход происходит с прерыванием связи, для восстановления которой абонентам необходимо произвести повторный вызов.
Транкинговые системы могут использовать как симплексные, так и дуплексные каналы радиосвязи, однако с целью упрощения и удешевления в них нередко применяется полудуплексный режим работы, при котором один и тот же канал поочередно используется для связи от центра управления (базовой станции) к абоненту и в обратном направлении.
Реализация принципа равного доступа к каналу связи может быть осуществлена децентрализовано либо при централизованном управлении. В первом случае функция нахождения свободного канала возлагается на абонентскую станцию, которая проводит последовательный поиск незанятого частотного канала во всем выделенном системе диапазоне. Во втором случае анализ занятости каналов связи осуществляет базовая станция либо непосредственно центр коммутации мобильной связи. Как правило, установление связи при последовательном сканировании частотного диапазона занимает достаточно большой интервал времени. Для обеспечения оперативности управления в современных ТСС предусматривается существование специального канала, посредством которого производится управление транкинговой системой, в том числе выполнение процедур установления и прекращения связи.
По способу организации канала управления различают ТСС с выделенным и распределенным каналом управления. В первом случае, как следует из названия, выделенный канал используется исключительно для управления работой системы. Во втором в процессе сеанса связи сигналы управления передаются одно- временно с речевым сигналом [6].
С учетом сказанного транкинговая система связи может быть представлена обобщенной структурной схемой (см. рис. 2.1), где использованы следующие обозначения:
• МС — мобильная станция (мобильный абонент);
• БС — базовая станция (центр управления);
• УОР — устройство объединения радиосигналов;
• Р — ретрансляторы;
•
ЦКМС — центр коммутации мобильной связи;
 'Ф'
'Ф'
• ТРОП — телефонная сеть общего пользования;
• ДПУ — диспетчерский пункт управления.
Следует отметить, что для ТСС наиболее характерно разделение каналов связи по частоте с индивидуальными ретрансляторами на разных частотах. Возможен и вариант ТСС с использованием широкополосных ретрансляторов, обслуживающих сразу все каналы. Назначение остальных блоков структурной схемы является очевидным и не требует дополнительных комментариев.
Как уже упоминалось ранее, совместимость различных систем и оборудования обеспечивается стандартизацией интерфейсов. Наибольшее распространение получили следующие протоколы транкинговой связи: MPT 1327, EDACS и TETRA.
Стандарт MPT1327, разработанный министерством почт и телекоммуникаций Великобритании (Mifnifstty of Post and Твlеcommunication (MPT)), определяет в основном протокол передачи информации управления и контроля состояния аппаратуры (иначе — информации сигнализации) для транкинговых систем наземной мобильной радиосвязи, причем информационные сообщения передаются по аналоговому радиоканалу. На его основе разработаны радиоинтерфейс определяемый протоколом МРТ 1343, и радиоинтерфейс БС — МРТ 1347. Стандартами предусматривается передача информации со скоростью 1,2 кбит/с по каждому из 500 каналов связи в диапазоне частот 201,2125...207,4875 МГц (MPT 1347) и 193,2125...199,4875 МГц (MPT1343), причем каждый дуплексный канал занимает две полосы шириной 12,5 кГц с разносом каналов приема и передачи в 8 МГц [6].
Фирмой Ericsson разработана система транкинговой радио- связи, получившая название EDACS (Enhanced Digital Access Communications System — Усовершенствованная система связи с цифровым доступом). Системы EDACS выпускаются в различных модификациях, причем различают системы EDACS, сети EDACS и расширенные сети EDACS [6]. Системы EDACS, объединенные между собой посредством контроллеров узлов связи и диспетчерских пунктов управления, образуют сети EDACS, которые, в свою очередь, с помощью некоторых интегрированных узлов связи могут объединяться в расширенную сеть для покрытия значительных территорий.
В системе EDACS применяются два типа радиоканалов— рабочий канал и канал управления. Канал управления служит для обмена цифровой информацией сигнализации между мобильными станциями и устройствами управления работой всей системы. Рабочие каналы используются для обмена собственно информацией (разговорной или данными) между мобильными станциями. Системы и сети EDACS рассчитаны на использование как аналоговых, так и цифровых станций, обеспечивающих передачу речевых сигналов в цифровой форме. Стандартная скорость передачи данных составляет 9,6 кбит/с по каждому из 20 каналов системы EDACS в диапазонах частот 30...300 МГц, 800 МГц или 900 МГц с разносом каналов связи 25, 30 и 12,5 кГц.
Общие тенденции, связанные с унификацией и интеграцией СМР
идентичного назначения, привели к разработке под эгидой ETSI (European
Telecommunications Standards Institute — Европейский институт стандартов
связи) общеевропейского стандарта TETRA (Trans-European Trunked Radio —
Общеевропейская система транкинговой связи), изменившего свое название с
апреля
к цифровому представлению передаваемой информации и использовано не частотное, а временное разделение каналов. В результате этих и ряда других мер скорость передачи в системе достигла 36 кбит/с. Для системы TETRA выделены два дуплексных участка спектра в полосе частот 380...400 МГц при разносе радиоканалов для приема и передачи в 10 МГц и разносе соседних каналов в 25 кГц.
Следует отметить, что Россия имеет многолетний и весьма позитивный опыт развития и эксплуатации TCC. В подтверждение этому можно привести пример эволюции отечественной системы "Алтай" вплоть до модификации "Алтай-Зн" [8]. На момент написания книги сетями транкинговой радиотелефонной связи охвачена вся территория Российской Федерации, причем в 59 регионах названные сети работают с выходом на ТФОП. На 01.01.2000 г. услуги связи предоставляли 137 сетей, а число абонентов составило 45 тыс. Среди действующих сетей приблизительно половина укомплектована оборудованием "Алтай". Присутствуют также TCC типа SmarTrunk, МРТ 1327 и EDACS [10].
2.3.
Системы персонального радиовызова
Системы персонального радиовызова (СПРВ), или пейджинговые системы (от английского термина paging — вызов), представляют собой системы мобильной радиосвязи, обеспечивающие одностороннюю передачу коротких сообщений из центра системы (терминала персонального радиовызова, или пейджингового терминала) на миниатюрные абонентские приемники (пейджеры), причем передаваемые сообщения могут быть четырех типов — тональные, цифровые, буквенно-цифровые и речевые. В последнее время стали появляться публикации о разработке пейджеров для двусторонней связи, способных осуществлять передачу подтверждений о приеме сообщений [11].
По своему назначению СПРВ можно подразделить на частные (ведомственные) и общего пользования. Частные СПРВ предназначены для передачи сообщений на ограниченной территории в интересах отдельных групп пользователей, причем, как правило, передача осуществляется с диспетчерского терминала радиовызова без взаимодействия с ТФОП. Под системами общего пользования понимают системы мобильной радиосвязи, обеспечивающие передачу сообщений ограниченного объема от пользователей ТФОП (или с персонального компьютера) через пейджинговый терминал на абонентские приемники СПРВ. Потенциальными пользователями СПРВ в основном являются различные экстренные службы (скорая помощь, пожарная и аварийно-спасательная службы, полиция и пр.), а также лица, занятые в сфере оказания различного рода услуг (консультационных, бытового технического обслуживания и др.).
Основной отличительной чертой СПРВ служит ее работа вне реального времени, т.е, сообщения передаются не в момент его выдачи отправителем, а в порядке очереди, устанавливаемой центром управления, хотя на практике величина задержки между моментом отправления и получения не превышает нескольких минут. В сочетании с краткостью сообщений и односторонней направленностью СПРВ оказываются технически очень простыми, а значит и экономически выгодными потребителю, поэтому системы пейджинговой связи нередко называют "мобильной связью для бедных".
В самой общей версии структурная схема СПРВ представлена рис. 2.2, где используются сокращения [12]:
• ТПВ — терминал персонального вызова (paging terminal — РТ);
•
КСПВ — контроллер сети персонального вызова (paging network
controller — PNC);
• ЦЭиО — центр эксплуатации и обслуживания (operations and
maintenance center- ОМС);
• КЗОВ — контроллер зоны обслуживания вызовов (paging area controller — РАС);
• БС — базовая станция (Базе station — BS);
• АП — абонентский приемник (радел — Р).
Терминал персонального вызова принимает и анализирует входящие данные вызовов из ТРОП (или от других источников). Контроллер сети персонального вызова во взаимодействии с ЦЭ- и О обеспечивает все функции управления системой, в том числе такие, как определение типа вызова абонента — индивидуальный, общий или групповой. Контроллер зоны обслуживания осуществляет распределение данных к передатчикам БС, а также может выполнять некоторые статистические вычисления. Базовые станции контролируют и передают сигналы радиовызова на соответствующие абонентские приемники. Применение нескольких БС в пределах зоны действия СПРВ позволяет обеспечить более надежную связь с абонентами.

Ключевым фактором в развитии СПРВ, как и в случае ТСС, явилась стандартизация радиоинтерфейс. В настоящее время наиболее широкое распространение получили стандарты POCSAG, ERMES, а также семейство протоколов FLEX [6, 12].
Стандарт POCSAG (Post
Office Соdе Standardization
Advisory Group —
Консультативная группа стандартизации кодов почтовой связи), разработанный в
Англии в
Требования к функциональному развитию сетей СПРВ, увеличению скорости передачи сообщений, а также интеграции национальных сетей СПРВ в транснациональные привели к раз- работке стандарта ERMES (European Radio Ntessaging System— Европейская система передачи сообщений). Предусматривается выделение СПРВ ERMES диапазона частот 169,4...169,8 МГц, в котором организуется 16 радиоканалов с разносом частот 25 кГц и скоростью передачи сообщений 6,25 кбит/с.
Примером дальнейшего развития СПРВ может служить система протоколов FLEX (включая ReFLEX и InFLEXion), разработанная фирмой Motorola. Достоинством последних является повышенная скорость передачи сообщений, возможность двустороннего пейджинга, а также передача голосовых сообщений.
На
ранних этапах развития массовой мобильной связи СПРВ получили достаточно
широкое распространение, причем рост количества обслуживаемых абонентов доходил
до 20% ежегодно. Так,
если в
2.4. Системы персональной спутниковой связи
Термином "системы персональной спутниковой связи" (СПСС) объединяются различные по построению и орбитальной конфигурации системы, в которых пользовательский терминал получает и передает сообщение по радиолинии, напрямую связывающей его с космическим аппаратом (КА). Основная роль СПСС в свете современных воззрений состоит в распространении услуг мобильной связи на те участки земной поверхности, где развертывание наземных сетей невозможно в принципе или экономически нецелесообразно, т.е. в акваториях Мирового океана, в районах с малой плотностью населения и пр. Можно сказать, что СПСС предназначены для "глобализации" информационного сервиса, поскольку свободны от каких-либо ограничений, связанных с географией или рельефом обслуживаемых регионов.
Несмотря на сходство в части объемов и номенклатуры предоставляемых услуг, различные СПСС обладают особенностями, в немалой степени обусловленными характеристиками орбит КА. Исходя из этого, общепринята классификация СПСС, основанная на следующих орбитальных параметрах КА:
• возвышение над поверхностью Земли;
• форма орбиты;
• периодичность прохождения КА над точками земной поверхности;
• наклонение орбиты к плоскости экватора.
По высоте над поверхностью Земли различают следующие СПСС:
•
низкоорбитальные (диапазон высоты орбит от 700 до
•
среднеорбитальные (от 5000 до
•
высокоорбитальные (около
По форме орбиты КА подразделяются на:
• круговые (труднореализуемые на практике);
• близкие к круговым (наиболее распространенный тип орбит в системах спутниковой связи);
• эллиптические;
• геостационарные (т.е. круговые экваториальные с периодом обращения КА, равным одним суткам);
• параболические и гиперболические (характерные для систем, работающих за пределами околоземного пространства: космические зонды, аппараты для исследования планет и Солнца и пр.).
По периодичности прохождения КА над точками земной поверхности орбиты делятся на:
• синхронные, проекции которых на земную поверхность (трассы) совпадают ежесуточно (изомаршрутные) либо раз в несколько суток (квазимаршрутные);
• несинхронные, у которых трассы, соответствующие двум любым орбитам КА, не совпадают никогда.
В зависимости от наклонения различают орбиты:
• прямые (с углом наклона меньше 90');
• обратные (с углом наклона больше 90');
• полярные (с углом наклона, равным 90');
• экваториальные (лежащие в экваториальной плоскости). В состав любой СПСС входят следующие компоненты:
• космический сегмент, состоящий из спутников- ретрансляторов, число которых варьируется от единиц до сотни;
• наземный сегмент, состоящий из центра управления СПСС, центра запуска КА, командно-измерительных станций, центра управления связью и шлюзовых станций;
• пользовательский (абонентский) сегмент, состоящий из персональных или коллективных терминалов спутниковой связи;
• наземные сети связи, с которыми посредством интерфейса связи сопрягаются шлюзовые станции СПСС.
В настоящее время особое внимание уделяется разработке систем связи на базе низкоорбитальных СПСС. Повышенный интерес к ним объясняется умеренными требованиями к мощности, излучаемой пользовательским терминалом, и, как следствие, сравнительной дешевизной и малыми габаритами последнего.
Низкоорбитальные СПСС позволяют обеспечить бесперебойную связь с абонентами, находящимися в любой точке земной поверхности и практически не имеют альтернативы при организации связи в регионах со слабой инфраструктурой связи и низкой плотностью населения. Дополнительным аргументом в пользу развития низкоорбитальных СПСС служит и экологический фактор: для гарантии полной биологической безопасности человека необходимо, чтобы выходная мощность СВЧ- излучения радиотелефона не превышала 50 мВт. Эффективный прием сигналов такой мощности без значительного усложнения аппаратуры возможен только в случае низкоорбитальных систем связи. Наиболее известными представителями систем этого типа являются СПСС Iridium и Globalstar.
Низкоорбитальная система
Iridium [14] предназначается для дуплексной радиотелефонной связи, факсимильной
связи и передачи данных. Инициатором проекта, начатого в
Каждый
КА орбитальной группировки формирует с помощью 6 фазированных антенных решеток
48 приемопередающих лучей в диапазоне 1616...1626,5 МГц. Каждый из названных
лучей освещает на земной поверхности соту диаметром
Радиолиния "абонент — КА" содержит 64 канала с разносом частот между ними, равным 160 кГц, при ширине полосы каждого канала 126 кГц. Радиолиния "КА — абонент" содержит 29 каналов с разносом частот 350 кГц при ширине полосы канала 280 кГц. Формат многостанционного доступа сочетает временное разделение каналов для каждой соты и частотное разделение для смежных сот. В результате пропускная способность системы при использовании всего диапазона частот и 48 лучей каждого КА составляет 3835 дуплексных каналов связи [14].
Несмотря на успешное
развертывание данной системы к осени
СПСС
Globalstar, разработанная корпорациями Qualcomm, Loral и рядом других, в
идеологическом плане основана на использовании принципов сотовых систем связи с
выносом в космическое пространство ретрансляторов базовых станций. Космический
сегмент системы содержит орбитальную группировку из 48 низкоорбитальных
спутников-ретрансляторов, размещенных на 8 круговых орбитах с наклонением в 52'
и высотой
В
России коммерческая эксплуатация системы Globalstar началась в ноябре
Следует упомянуть, что и в России разрабатывается несколько проектов низкоорбитальных систем связи, из которых наиболее продвинутым в реализационном плане является СПСС Тонец". Указанная система прошла все стадии разработки и находится на этапе развертывания. Орбитальная группировка СПСС Гонец" должна состоять из 45 спутников-ретрансляторов, расположенных на 5 квазиполярных орбитах с наклонением
83 по 9 КА на каждой, что
является оптимальным с точки зрения радиопокрытия территории России. Плоскости
орбит разнесены друг относительно друга на 36 по долготе, а высота орбиты
составляет
2.5.
Сотовые системы мобильной связи
Рассмотренные в разделе 2.2 ТСС в принципе не ориентированы на коммерческого потребителя, имея первоочередной целью удовлетворение ведомственных и корпоративных нужд. Они, как правило, характеризуются небольшой абонентской емкостью, фиксированной и весьма скромной номенклатурой услуг, невысокой скоростью передачи данных и пр. СПРВ (см. 2.3), тем более не отвечают потребительским стандартам XXI века и имеют статус переходного средства одностороннего оповещения, постепенно вытесняемого более прогрессивными технологиями мобильной связи по мере расширения и удешевления последних. Что же касается СПСС, то основным препятствием на пути их массового внедрения следует считать экономический фактор, т.е. высокую стоимость предоставляемых услуг.
В свете сказанного становятся понятными причины, по которым ведущие позиции в коммерческой мобильной связи принадлежат наземным системам, основанным на возможности многократного использования выделенного ресурса при соответствующем пространственном разнесения приемопередатчиков базовых станций. Исторически первыми системами, многократно эксплуатирующими выделенный ресурс, явились системы с повторным использованием частотных каналов. Идея повторного применения частот заключается в том, что в смежных областях радиопокрытия СМР используются разные полосы разрешенного частотного диапазона, тогда как в зонах, достаточно удаленных друг от друга, допускается передача в одних и тех же частотных каналах. Возможность подобного частотно-территориального планирования объясняется быстрым пространственным затуханием радиоволн дециметрового диапазона, применяемых в СМР этого типа.
Участок территории радиопокрытия, на котором осуществляется связь в фиксированной полосе частот, схематически изображается в виде правильного шестиугольника и по сходству с пчелиными сотами получил название соты. В результате СМР с пространственным разнесением частот получили наименование сотовых систем мобильной связи (ССМС). Группу сот, в пределах которой отсутствует повторное использование частотных полос, называют кластером. Сотовая топология позволяет многократно увеличить абонентскую емкость системы по сравнению с системами радиальной структуры и охватить сколь угодно большую зону обслуживания без ухудшения качества связи и расширения выделенного частотного диапазона. Вместе с тем использование сотового принципа построения предполагает и ряд усложнений, касающихся определения текущего местоположения мобильного абонента и обеспечения непрерывности связи при перемещении его из одной соты в другую. Соответствующая процедура получила название эстафетной передачи (в английской транскрипции handoff или handover).
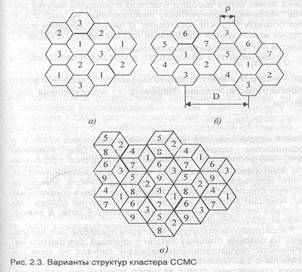
Высокая спектральная эффективность СОМС достигается ценой максимально частого повторного использования одних и тех же частотных полос, и с этой точки зрения наиболее пред- почтительным был бы трехсотовый (или трехэлементный) кластер, изображенный на рис. 2.3, а, где одинаковыми цифрами,. обозначены соты с совпадающими наборами частотных каналов... Кроме того, каждой из сот кластера данного типа отводится частотная полоса, равная трети полного частотного диапазона, а значит, и треть общего числа каналов связи в системе, что; обеспечивает значительную абонентскую емкость соты. Вместе с тем частое повторение зон с одинаковыми полосами частот характеризуется заметным уровнем стоканальных помех, т.е. помех от станций системы, работающих в той же полосе частот, но расположенных в несмежных сотах. Для уменьшения влияния соканальных помех более выгодны кластеры с большим числом элементов, например 7-элементные, изображенные на рис. 2.3, б. Можно показать [16], что расстояние D между центрами ячеек, в которых используются одинаковые полосы частот, и число и, элементов в кластере связаны соотношением
D=√3пс
р,
где р — радиус ячейки, т.е. радиус окружности, описанной вокруг правильного шестиугольника. Параметр , определяемый соотношением называют коэффициентом уменьшения соканальных помех или коэффициентом соканального повторения. Для величины g = 1)п, употребляют наименование коэффициент эффективности повторного использования частого или коэффициент повторного использования частот. Увеличение числа элементов в кластере, благоприятно сказывающееся на уровне соканальных помех, приводит к пропорциональному уменьшению полосы частот, которая может быть использована в каждой соте, а значит, снижению абонентской емкости соты.
Рассмотренные структуры
кластеров предполагают использование на базовых станциях антенн с круговой
диаграммой направленности, осуществляющих передачу сигнала по всем направлениям
с одинаковой мощностью. Эффективным способом снижения соканальных помех является
применение направленных (в горизонтальной плоскости) антенн с шириной диаграммы
направленности 120 или 60', в результате чего шестиугольная ячейка разбивается
на 3 или 6 секторов, т.е. производится секторизация сот. В секторе сигнал
излучается антенной только в одну сторону, а уровень излучения в противоположном
направлении сокращается до минимума. Таким образом, секторизация сот позволяет
чаще использовать одинаковые полосы частот в кластерах без изменения их
структуры либо в рамках прежней схемы повторения частот заметно снизить уровень
соканальных помех. Если кластер состоит из и, сот, каждая из которых
содержит , секторов, то говорят, что
размерность кластера (и,, и, х т,). Типичными размерностями
кластеров, широко применяемых на практике, являются (3,9), (4,12), (7,21). На
рис. 2.3, в приведен возможный вариант распределения наборов частотных каналов в
секторизованном кластере размерности (3,9). Отметим, что разработка топологии
ССМС является своеобразной и достаточно сложной задачей.
2.6.
Эволюция систем и стандартов сотовой связи
История развития ССМС насчитывает немногим более 25 лет, однако этот короткий период был отмечен рядом поворотных моментов и существенной эволюцией воззрений на роль и философию рассматриваемых систем. Можно говорить о трех поколениях ССМС, различия между которыми — с известной долей условности — устанавливаются следующими критериями.
Все ССМС или стандарты первого поколения являются аналоговыми. В их числе:
•
AMPS (Advanced Mobile Phone Service) — Усовершенствованная мобильная
телефонная служба. Диапазон рабочих частот — 869...894 МГц для БС и 824...849
МГц для МС, ширина полосы
канала связи — 30 кГц. Начало коммерческого применения—
• ТАСS (Total Access Communications
System) — Общедоступная
система связи. Частотный диапазон:
935...950 МГц для БС, 890...905 МГц для МС, ширина полосы канала связи — 25 кГц,
Начало коммерческого применения —
• NMT
(Nordic Mobile Telephone System) — Скандинавская система мобильной
телефонной связи. Существует в двух основных вариантах NMT 450 и NMT 900,
отличаясь только диапазоном используемых частот: NMT 450 — 463...467,5 МГц для
БС и 453...457,5 для МС; NMT 900 — 935...960 МГц для БС и 890...915 МГц для МС. Ширина полосы канала — 25 кГц. Начало коммерческого
использования —
Упомянем также аналоговые системы первого поколения С-450 (Германия и Португалия), RTMS (Radio Telephone Mobile System — мобильная радиотелефонная система) (Италия), Radio- com 2000 (Франция) и NTT (Nippon Telephone and Telegraph Sys- tem — Японская система телефона и телеграфа).
Во всех перечисленных аналоговых стандартах применяется метод множественного доступа с частотным разделением каналов, для передачи речевой информации используется частотная модуляция, а для передачи информации сигнализации - частотная манипуляция. Системам первого поколения присущ ряд недостатков, основными из которых являются относительно низкая абонентская емкость, несовместимость различных стандартов, отсутствие засекречивания передаваемых сообщений, невозможность взаимодействия с цифровыми системами с интеграцией служб (ISDN) и пакетной передачей данных (PDN).
В значительной степени указанных недостатков лишены цифровые ССМС второго поколения, среди которых наибольшее распространение получили следующие:
•
D-AMPS (Digital-AMPS — цифровая AMPS), или IS-54
(IS— Сокращение от Interim Standards, т.е. промежуточный стандарт),
представляет двухрежимную аналого-цифровую систему, совмещающую работу в
аналоговом и цифровом режимах в том же диапазоне, что и AMPS. Начало
практического использования относится к
• GSM (Global System for Mobile Communications)
Глобальная система мобильной связи. Данным стандартом предусматривается работа в
диапазоне 935...960 МГц для БС и 890...915 МГц для МС
при ширине полосы канала связи 200 кГц. Практическое
применение общеевропейского стандарта GSM900 началось в
•
PDC (Personal Digital Сеllиlаr) — Персональная
цифровая сотовая связь. Цифровая ССМС, разработанная в Японии в
возможностью работы в нескольких диапазонах частот — 800, 1400 и 1500 МГц. Хотя стандарт PDC используется только в Японии, его абонентская база достигает 39,5 млн. пользователей, или 13% от общемирового числа абонентов ССМС;
• IS-95 (Interim Standard-95), альтернативное наименование cdmaOne. Все перечисленные ранее цифровые ССМС второго поколения используют метод множественного доступа с частотно- временным разделением каналов связи. Критическими явились 1992 — 1993 гг., когда в США был разработан первый стандарт ССМС на основе метода множественного доступа с кодовым разделением (CDMA), получивший название IS-95. Диапазон рабочих частот — 824...848 МГц для МС и 869...894 МГц для БС при ширине спектра излучаемых сигналов 1,25 МГц. Практическое применение указанного стандарта началось в 1995 — 1996 гг. в Гонконге, США и Южной Корее, причем в США используется версия этого стандарта для диапазона 1900 МГц.
Что касается ССМС третьего поколения, то на момент написания книги процесс формирования их облика еще продолжается, изобилуя коллизиями, конфликтами интересов и компромиссами. Принципиальные критерии, отличающие ССМС третьего поколения, а также некоторые детали конкретных спецификаций, имеющих фактический статус стандартов и весьма близких к практическому воплощению, рассмотрены в гл. 12.
Начало развития сотовой связи в России относится к
На
конец

В заключение подраздела рассмотрим основные элементы ССМС и характер их взаимодействия. Хотя сотовые системы разных стандартов имеют значительные отличия в деталях, интегральное их описание с помощью некоторой обобщенной модели возможно и полезно. В качестве подобного обобщения выберет схему ССМС, приближенную к стандарту GSM, как наиболее отчетливо структурированную. Функциональное построение CCMC иллюстрируется схемой на рис. 2.4. В приведенной схеме условно можно выделить четыре основных компонента — центр управления и обслуживания (ЦУО) (иначе operations and maintenance center- ОМС) и три подсистемы:
•
подсистема мобильных станций ПМС (Mobile station sub- system MSS);
• подсистема базовых станций ПБС (base station sub- system BSS);
• подсистема коммутации ПК (switching subsystem SSS),— функциональное сопряжение которых описывается рядом интерфейсов.
В заключение подраздела рассмотрим основные элементы ССМС и характер их взаимодействия. Хотя сотовые системы разных стандартов имеют значительные отличия в деталях, интегральное их описание с помощью некоторой обобщенной модели возможно и полезно. В качестве подобного обобщения выберет схему ССМС, приближенную к стандарту GSM, как наиболее отчетливо структурированную. Функциональное построение СОМС иллюстрируется схемой на рис. 2.4. В приведенной схеме условно можно выделить четыре основных компонента — центр управления и обслуживания (ЦУО) (иначе operations and maintenance center- ОМС) и три подсистемы:
•
подсистема мобильных станций ПМС (Mobile station sub- system
MSS);
• подсистема базовых станций ПБС (base station sub- system BSS);
• подсистема коммутации ПК (switching subsystem SSS),— функциональное сопряжение которых описывается рядом интерфейсов.

ЦУО
является центральным элементом ССМС, который обеспечивает управление другими
компонентами системы, а также контроль качества функционирования. Подсистема
мобильных станций объединяет оборудование, обеспечивающее доступ абонентов в
систему. Главным звеном в архитектуре ССМС является подсистема
коммутации, которая включает в себя центр коммутации мобильной связи ЦКМС
(mobile switching center MSC), визитный (гостевой) регистр местоположения
ВРМ (visited location register VLR), домашний регистр местоположения ДРМ
(home location register HLR), центр аутентификации ЦА (authentication
center AUC) и регистр идентификации оборудования РИО (equipment identity
register EIR). В подсистему базовых станций входят базовые
приемо-передающие станции БС (base transceiver station ВТS) и
контроллеры базовых станций КБС (base station controller BSC).
Центр коммутации мобильной связи обслуживает группу сот и обеспечивает все виды соединений, в которых нуждается в процессе работы мобильная станция, т.е. коммутацию мобильных абонентов друг с другом, с абонентом ТРОП и др. На ЦКМС возлагаются также функции коммутации каналов, к которым относятся "передача обслуживания" (или "эстафетная передача") и переключение каналов в соте при появлении сильных помех и неисправностей, если только это не является обязанностью КБС. Помимо коммутационных задач ЦКМС, управляет процедурами слежения за мобильными станциями с помощью домашнего и визитного регистров местоположения для обеспечения доставки вызова, а также процедурами аутентификации и идентификации абонентов с помощью ЦА и РИО.
Блоки ДРМ и ВРМ по своей сути представляют собой базы данных. Первый содержит сведения о постоянно приписанных данному ЦКМС абонентах и о видах услуг, которые им могут быть оказаны, второй содержит информацию об абонентах, временно находящихся в зоне обслуживания данного ЦКМС. Центр аутентификации обеспечивает возможность проведения процедуры аутентификации абонентов и шифрования передаваемых сообщений, РИО содержит сведения об эксплуатируемых мобильных станциях на предмет их исправности и санкционированного использования.
Контроллер базовых станций осуществляет управление несколькими БС, которые обеспечивают связь с МС через радиоинтерфейс, а также производит упаковку информации, передаваемой в ЦКМС, и ее распаковку при передаче в обратном направлении. К числу операций, производимых КБС, относятся передачи обслуживания при переходе МС между сотами, контролируемыми одним и тем же КБС, передача вызовов между МС, находящимися в зонах действия разных БС, но одного и того же контроллер (в противном случае первичное управление возлагается на ЦКМС). Под управлением КБС осуществляются радиоизмерения в каналах связи, регулируется мощность передатчиков мобильных и базовых станций.
3.
ХАРАКТЕРИСТИКИ СРЕДЫ РАСПРОСТРАНЕНИЯ РАДИОВОЛН В СОТОВОЙ РАДИОСВЯЗИ
3.1. Регламентация радиочастотного
спектра
и диапазоны волн, используемые в мобильной
связи
Радиоканал является неотъемлемым и критически важным компонентом любой системы беспроводной связи. В свою очередь, характеристики радиоканала как среды распространения радиоволн зависят от длины последних, т.е. от занимаемого системой диапазона частот. Выбор частотного диапазона является одним из наиболее ответственных этапов системного проектирования и должен учитывать целый ряд факторов технического, экономического и организационного плана:
• возможность выделения необходимого числа частотных каналов;
• условия распространения радиоволн на трассе;
• проницаемость зданий и сооружений;
• интенсивность помех естественного и искусственного происхождения в данном участке спектра;
• электромагнитная совместимость с другими системами, работающими на близких частотах;
• возможность построения абонентской аппаратуры с требуемыми экономическими, эргономическими и эксплуатационными характеристиками и т.д.
В табл. 3.1 приведены полосы частот, используемые в основных существующих системах сотовой радиосвязи [6, 13].
Первая
СМР была реализована в
В
дальнейшем развитии СМР просматривается общая тенденция постепенного перехода к
более высокочастотным диапазонам (при этом в

•
•
•
•
Аналогичным путем развивалась системы мобильной радиосвязи и в Европе (с естественным запаздыванием по времени, связанным, в немалой степени, со Второй мировой войной).
Переход к более высокочастотным диапазонам, который обеспечивался постепенным развитием технологии и схемотехники, связан, в первую очередь, с необходимостью увеличении абонентской емкости CMP в условиях постоянно растущего спроса и повышения требований к качеству предлагаемых услуг. Очевидно, что при таком переходе облегчается выделение необходимого числа частотных каналов.
Существует практическое ограничение на использование высоких частот, связанное с сильным затуханием радиосигналов в атмосфере при длине волны менее 10...12 см. Тем самым верхняя граница частот, которые могут быть использованы в мобильной связи, лежит в районе 2500...3000 МГц.
Не следует, однако, думать, что повышение несущей частоты однозначно улучшает все характеристики системы мобильной связи. В частности, определенные преимущества имеет спектральная полоса 400...500 МГц. В этом диапазоне хорошее прохождение сигнала позволяет увеличить зону покрытия в малонаселенных районах.
Несмотря на важность
технических аспектов выбора частотного диапазона, все большее значение
приобретают организационные трудности, связанные с ограниченностью частотных
ресурсов. Эта проблема, возникнув впервые в США в середине 30-х годов ХХ века,
стала весьма острой вскоре после
Бурное развитие отраслей техники, связанных с радиоизлучением (радиовещание, телевидение, связь, радиолокация, радионавигация и т.д.), потребовало создания специального механизма регламентации использования частотного спектра и соответствующих организационных структур. Такими структурами являются, в частности, упомянутая выше Федеральная комиссия связи США (созданная в конце 1920-х годов), Европейская Конференция Администраций Почт и Электросвязи (СЕРТ — Conference of European Posts and Telegraphs), а также Российская Государственная Комиссия по радиочастотам (ГКРЧ).
Наряду с проблемой электромагнитной совместимости различных радиосредств, работающих в одном частотном диапазоне, имеется и проблема совместимости различных систем мобильной радиосвязи. Развитие этих систем шло в различных странах схожими путями, но на первых этапах без взаимного согласования. В результате в европейских странах образовалось так называемое "лоскутное одеяло": одновременно функционировали аналоговые сотовые системы связи, очень схожие по принципам построения, использующие один и тот же диапазон частот (например, 450 МГц), но не совместимые между собой.
В Европе при переходе к цифровым системам выход был найден в виде разработки общеевропейского стандарта GSM, для которого, как упоминалось в 2.6, были выделены полосы частот в диапазоне 900 МГц. В дальнейшем совершенствование этого стандарта привело к освоению нового диапазона — 1800 МГц.
В США основной аналоговый стандарт AMPS, работающий также в диапазоне 900 МГц, получил столь широкое распространение, что прямая замена его цифровым стандартом оказалась невозможной из экономических соображений. По этой причин был разработан двухрежимный аналого-цифровой стандарт D-AMPS (IS-54), позволяющий совместить работу аналогово и цифровой систем в одном и том же диапазоне. При усовершенствовании этой системы, как и в случае GSM, но несколько раньше по времени, был освоен диапазон 1800 МГц (IS-136).
В США (см. также Я 2.6), нашел применение и стандарт GSM. Однако из-за того что диапазон 1800 МГц занят системной D-AMPS в версии IS-136, ему была выделена полоса частот в диапазоне 1900 МГц ("американский" GSM, или IS-661).
Россия, являясь
родоначальницей радио, долгое время развивала практически только
профессиональные системы мобильной связи. Начало развития
сотовой связи в России относится к
В настоящее время в России для сотовой связи выделены частотные каналы в диапазонах частот 450 МГц (стандарт NMT), 900 МГц и 1800 МГц (стандарт GSM), а также 800 МГц (О-AMPS).
3.2.
Помехи в каналах сотовой связи
На работу СМР в дециметровом диапазоне длин волн, который используют практически все существующие системы сотовой связи, оказывают влияние различные помехи естественного и искусственного происхождения.
Основными помехами естественного происхождения являются шумы приемника, атмосферные шумы, образующиеся электрическими разрядами во время гроз. Кроме того, мешающее воздействие могут создавать статическое электричество, космические и солнечные шумы.
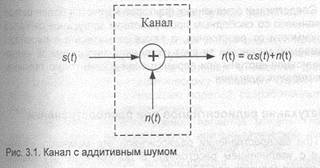
Обычно при анализе и синтезе систем связи эти помехи рассматриваются как аддитивный белый гауссовский шум (АБГШ). Модель канала с аддитивным шумом показана на рис. 3.1 (параметр а здесь характеризует затухание сигнала в канале).
Для густонаселенных регионов весьма характерна значительная интенсивность помех искусственной природы, источниками которых служат:
• электротранспорт и системы зажигания автомобилей;
• промышленные электроустановки;
• радиоэлектронные средства различного назначения (в частности, можно упомянуть радиосистему ближней навигации, полоса частот которой частично перекрывает диапазон сотовой системы стандарта GSM).
Особо следует отметить внутрисистемные (соканальные) помехи, обусловленные одновременной работой в одной полосе частот нескольких станций (например, абоненты, работающие на одной частоте в соседних кластерах, или базовые станции соседних сот сети IS-95).
Серьезные проблемы, возникающие при построении систем мобильной радиосвязи, связаны не только с воздействием отмеченных помех, но и со специфическими условиями функционирования СМР:
• зоной действия СМР являются, в основном, города и пригороды с различными плотностью и характером застройки, интенсивностью движения транспорта, типом подстилающей поверхности;
• мобильная станция, как правило, находится вне прямой радиовидимости базовой станции;
• сигнал в точку приема поступает в результате многолучевого распространения, т.е. переотражения от многочисленных препятствий (здания, деревья, подстилающая поверхность);
• движение мобильной станции приводит к появлению доплеровского сдвига частоты.
Следствиями отмеченных
факторов являются более резко по сравнению со свободным
пространством затухание сигналю в зависимости от расстояния, а
также значительные перепады принимаемой мощности за счет изменения многолучевой
интерференционной картины при перемещении абонентского терминала — замирания
сигналов.
3.3. Затухание радиосигналов при распространении
При распространении радиосигнала его мощность уменьшается с увеличением расстояния. В общем виде эту зависимость можно записать так [13]:
Рr —— а0 РTR-v, (3.1)
где Р> и PR — мощность излучаемого и принимаемого сигнала соответственно; R — расстояние между передающей и приемной станциями; v — показатель затухания; а — нормирующий множитель.
В свободном пространстве, когда в зоне передачи нет объектов, поглощающих и отражающих энергию, мощность принимаемого сигнала обратно пропорциональна квадрату расстояния (v= 2) [20]:
В CMP распространение радиоволн, подобное распространению в свободном пространстве, существует только на очень коротких трассах, не содержащих препятствий.
При наличии рассеивания и многолучевого распространения показатель затухания увеличивается и, как показывают результаты экспериментальных исследований, для диапазонов, применяемых в CMP, изменяется в пределах v = 3 — 5 в зависимости от характера местности [21,22] и особенностей подстилающей поверхности. Для CMP приемлема следующая классификация типов местности [21]:
• открытые районы — участки с очень небольшим числом препятствий, таких как деревья или строения;
• пригородные зоны — участки с небольшими строениями и деревьями, находящимися поблизости от подвижного объекта;
• городские районы — участки, плотно застроенные много- этажными домами.
Точный аналитический расчет энергетического потенциала радиоанапа для реальных условий функционирования CMP практически невозможен из-за наличия множества факторов, плохо поддающихся математическому описанию. Оценку энерго потенциала проводят с помощью моделей, разработанных на основе многочисленных экспериментов.
Наиболее употребительной является модель Окамуры- Хата, основанная на графической или аналитической аппроксимации результатов практических измерений [21, 22].
При графической аппроксимации обычно используется следующее уравнение, в котором все величины приведены в децибелах [21]:
PR =
Р0
— Am(f, R) + Нb(Н, R) + Hm(h, f) +
Ks(f), (3.3)
где P, — мощность
принимаемого сигнала при передаче в свободном пространстве; A(f, R) —
фактор уменьшения медианного значения мощности по отношению к аналогичному в
свободном пространстве при эффективной высоте антенны базовой станции Н =
Графики для нахождения Am, H>, Hm и К„основанные на результатах экспериментов, проведенных Окамурой, приведены, например, в [21].
Хата обобщил результаты многочисленных экспериментов и получил эмпирические формулы для расчета средних потерь при распространении L для случая всенаправленных антенн базовой станции и мобильного объекта. Эти формулы, известные также как метод прогнозирования Окамуры, имеют следующий вид [19]:
Приведенные формулы в большинстве случаев достаток точно (с максимальной ошибкой около 1 дБ) соответствуют экспериментальным данным при выполнении следующих условий [19]:
F0Є [150, 1500] МГц,
Н Є [30, 400] м,
h
Є [1, 10] м, R <
Одним из недостатков модели Окамуры — Хата является то, что она не учитывает специфические условия района, в котором находятся базовая и мобильная станции,
Ряд дополнительных параметров позволяет учесть модель Ксиа-Бертони [23]. Эта модель построена на основании уравнений волновой оптики и принимает во внимание такие детали распространения сигнала, как дифракция на кромках крыш, отражение от стен домов. Полученные аналитические выражения позволяют рассчитать средние потери при распространении с учетом ширины улиц, этажности зданий и высоты расположения антенны БС относительно среднего уровня крыш (s том числе при расположении антенны БС ниже среднего уровня крыш). Однако эти выражения еще более громоздки, чем выражения (3.4 — 3.6), и повторение их здесь вряд ли целесообразно.
Для грубой оценки потерь мощности при распространении можно воспользоваться их приближенными (усредненными) зависимостями от параметров [22]:
а) от расстояния: 38 дБ на декаду;
б) от высоты антенны базовой станции: 6 дБ на октаву;
в) от
высоты антенны мобильной станции: 3 дБ на октаву при h <
г) в пригороде потери примерно на 10 дБ меньше, чем в городе.
Необходимо отметить, что потери мощности при распространении сигнала зависят и от многих других факторов, помимо рассмотренных (например, наличия листвы на деревьях), учесть которые крайне трудно. По этой причине при проектировании CMP необходимо проведение экспериментальных исследований уровней мощности сигналов в предполагаемом районе развертывания. В частности, на результатах таких экспериментов должен базироваться выбор месторасположения базовых станций.
Сигнал в точке приема образуется в результате интерференции радиоволн, поступающих по различным путям распространения (лучам). Каждая радиоволна характеризуется своими параметрами: временем распространения, доплеровской частотой, амплитудой. Математически это может быть записано в виде [21, 22]:
В этом выражении i-я радиоволна с углом прихода а, (i =1...N, ) входит в качестве составляющей в композицию из М; радиоволн со временем задержки Т„-, определяемым длиной соответствующей трассы распространения. Доплеровский частотный сдвиг каждой радиоволны определяется скоростью перемещения МС и углом прихода:
Амплитудные множители CД- определяются энергией каждой составляющей.
При изменении условий распространения, положения и свойств отражающих объектов и т.д. интерференционная картина становится нестационарной, что приводит к колебаниям уровня мощности принимаемого сигнала. Это может происходить даже в том случае, когда МС неподвижна (например, если один или несколько сигналов приходят на неподвижную МС после отражения от других, движущихся объектов). Однако основной причиной изменения мощности принимаемых сигналов является движение МС.
При перемещении МС одновременно происходят два процесса:
• изменение фазовых соотношений между радиоволнами, из которых складывается результирующий сигнал, при сохранении путей распространения этих радиоволн;
• изменение путей распространения радиоволн, т.е. точек переотражения.
Оба процесса приводят к
изменению уровня огибающей результирующего сигнала
(замираниям), однако характер этих изменений существенно различен. Если записать принятый МС сигнал с выделенными результирующей
огибающей r(t) и полной фазой e(t)
s(t) = r(t) cos[ф.(t)],
то огибающую можно представить в виде произведения
r(t) = т(t)r0(t),
где первый сомножитель m(t) отражает медленные изменения,
связанные с изменением путей распространения радиоволн, а второй — г (1) — быстрые изменения, связанные с изменением фазовых соотношений.
Медленные замирания имеют место при перемещении абонента на значительные расстояния (»10А). При таком перемещении МС практически полностью изменяются пути прохождения радиоволн. По существу медленные замирания представляют собой колебания среднего уровня сигнала при перемещении МС, на которое накладываются быстрые замирания, вызванные много лучевостью.
Общепринятой моделью для медленных замираний, хорошо согласующейся с экспериментальными данными, является логарифмически-нормальный закон распределения
Глубина медленных замираний составляет обычно o = 10дБ в городских условиях и o = 6дБ в пригороде [13, 16].
При
скорости передвижения МС 1/ =
Быстрые замирания непосредственно связаны с многолучевым распространением сигналов.
При большом числе трасс распространения в соответствии с центральной предельной теоремой компоненты электромагнитного поля могут приближенно считаться гауссовскими случайными процессами [21]. В этом случае плотность распределения вероятностей мгновенных значений огибающей принимаемого сигнала описывается законом Рэлея — Райса:
Если прямой сигнал отсутствует (МС находится вне прямой видимости БС), то Q, = 0 и плотность распределения вероятностей мгновенных значений огибающей описывается законом Рэлея (что хорошо согласуется с экспериментальными данными):
На рис. 3.2 показан вид распределения вероятностей Рэлея (3.11). Распределение имеет максимум при r = о. Среднее значение (математическое ожидание) r = cruz/2, а медиана r = v42ln2 .

При многолучевом распространении результирующий сигнал может быть как выше, так и ниже среднего значения. Асимметрия распределения (3.11) приводит к тому, что значения, меньшие среднего, более вероятны, чем значения, большие среднего.
Для оценки возможного диапазона изменения уровня сигнала [r, r,] нужно задать граничное значение вероятности Р, попадания мгновенных значений огибающей за пределы указанного отрезка:
Отсюда
можно получить граничные точки задающие диапазон, за
пределы которого значение огибающей выходит с вероятностью, не большей 2Р,:
Если ограничиться уровнем вероятности Pp = 10, то в соответствии с (3.14) получим: r, = 3,717а; rД = 0,045ст. Диапазон изменения уровня огибающей составляет г, /г„= 83,1 раза (38 дБ). При этом превышение уровня огибающей над средним значением составляет r, /r = 3 раза (9,4 дБ), а провалы ниже среднего значения — r/rД = 27,7 раз (28,6 дБ).
Период быстрых замираний может быть оценен на основе коэффициента корреляции огибающей, характеризующего различие амплитуды сигналов на различных частотах в различные моменты:
Для определения коэффициента корреляции необходимо задать закон распределения задержки сигнала при распространении и закон распределения углов прихода отдельных радиоволн.
Анализ экспериментальных данных показывает, что хорошей аппроксимацией плотности распределения вероятностей задержек сигнала является экспоненциальное распределение:
Для углов прихода отдельных радиоволн общеупотребительным является равномерное распределение:
На рис. 3.3 показана зависимость коэффициента корреляции от времени при нулевой расстройте (М = 0).
Первый нуль коэффициента корреляции имеет место при ДУг=2,4, т.е. при d= Уг = 0,38А. Измерения показывают, что в сельской местности первый нуль оказывается при d порядке 0,8А. Это связано с тем, что распределение углов прихода отдельных радиоволн отличается от равномерного [22]. В городских условиях измеренное значение d, соответствующее первому нулю коэффициента корреляции, оказывается несколько меньше расчетного.
Таким образом, можно считать, что при перемещении МС на расстояние порядка А/2 принимаемые сигналы оказываются слабо коррелированными. При этом пути распространения (точки переотражения) сигналов отдельных лучей остаются практически постоянными, а изменение фазовых соотношений приводит к изменению огибающей результирующего сигнала в больших пределах, т.е. к быстрым замираниям.
Период
быстрых замираний примерно соответствует времени перемещения МС на
расстояние А/2. Например, для систем, работающих в
диапазоне 900 МГц, при V =

Одним из наиболее неприятных следствий быстрых замираний является появление пакетов ошибок, возникающих тогда, когда уровень огибающей сигнала падает ниже определенного порога. Вероятность появления и длина пакетов ошибок определяется частотой выбросов (пересечения уровня) и длительностью замираний.
Для рэлеевских замираний частота NR пересечения уровня Я, может быть определена выражением [19]:
Расчеты, хорошо
согласующиеся с экспериментальными данными, показывают, что средняя частота
замираний глубиной 30...10дБ при скорости порядка
3.4.3. Частотно-селективные и временные селективные замирания
Излучаемые сигналы имеют определенную протяженность по времени (длительность) и частоте (ширину спектра). Если все спектральные составляющие сигнала замирают идентично и характеристики радиоканала не изменяются во времени, замирания называют гладкими. На практике оба эти условия часто не выполняются. При этом возникают частотно-селективные (ЧСЗ) и временные селективные (ВСЗ) замирания.
Основной причиной ЧСЗ является временное рассеяние вследствие многолучевого распространения. Разности фаз между компонентами одной и той же частоты, распространяющимися по разным путям, могут оказаться практически независимыми для разных частот спектра, так что одни гармоники в результате многолучевой интерференции могут усиливаться, а другие, наоборот, подавляться.
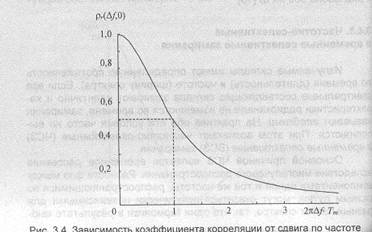
Частотно-селективные замирания проявляются тогда, когда ширина спектра сигнала превышает полосу когерентности канала связи — интервал частот Вс, на границах которого замирания спектральных компонент характеризуются определенным пороговым значением коэффициента корреляции р,(М, О). Уровень допустимых искажений зависит от методов обработки сигналов в кодеке и модеме.
Вид этой зависимости показан на рис. 3.4. При пороговою уровне корреляции 0,5 полоса когерентности Вс = 1/(2лТ). Значения величины Т могут изменяться в довольно широких пределах (порядка 0,1...10 мкс). При типичном для городских условий значении Т = 2 мкс полоса когерентности Вс = 80 кГц.
Частотно-селективные замирания во многом затрудняют работу СМР в следующих случаях:
• 403 эквивалентны фильтрации с неравномерной амплитудно
-частотной характеристикой и приводят к искажению спектра принимаемого сигнала, а значит, и его формы;
• если разнос по частоте прямого и обратного каналов CMP превышает полосу когерентности (что характерно практически для всех систем сотовой связи), ЧСЗ приводят к асимметричности канала связи, что усложняет процедуру управления мощностью передатчиков МС и БС;
• ЧСЗ сопровождаются растяжением принимаемых сигналов во времени, что может приводить к межсимвольной интерференции;
• ЧСЗ требуют использования более сложных технических решений при построении системы (например, эквалайзеры, разнесенный прием).
Вместе с тем частотная селективность замираний имеет и определенные положительные стороны, в частности:
• в узкополосных системах, когда спектр сигнала целиком лежит в полосе когерентности канала, однако несущая может варьироваться в широких пределах, многократно превышающих полосу когерентности, появляется возможность найти частотный канал с меньшей глубиной замираний (это используется, например, в системе сотовой связи стандарта GSM);
• в широкополосных системах, в которых спектр сигнала намного шире полосы когерентности канала (как, например, в системе стандарта IS-95), глубокие замирания поражают малую часть спектра; соответственно, пропорционально меньше будут и потери от воздействия замираний.
При изменении характеристик радиоканала с течением времени возникают ВСЗ. Основной причиной ВСЗ является доплеровское рассеяние — различие доплеровского сдвига частоты отдельных радиоволн при многолучевом распространении. Временные селективные замирания присутствуют всегда, когда есть движение MC и многолучевое распространение. В этом смысле они, по существу, являются синонимом быстрых замираний.
Временные селективные
замирания проявляются, когда длительность информационных посылок превышает
величину umepeana когеренгпности канала связи T« — отрезка
времени, на границах которого замирания характеризуются определенным пороговым
значением коэффициента корреляции р(
При
пороговом уровне корреляции 0,5 (см. рис. 3.3) Тсс 9/(16). Например, при
скорости движения
Селективные замирания, как правило, возникают в широко- полосных системах (например, в сетях CDMA). При этом не происходит резких провалов огибающей, однако имеет место растяжение принимаемых сигналов по времени и межсимвольная интерференция.
Некоторые методы
компенсации искажений сигнала на трассе распространения рассмотрены в гл. 6.
4. МОДУЛЯЦИЯ СИГНАЛОВ В ЦИФРОВЫХ СИСТЕМАХ МОБИЛЬНОЙ
СВЯЗИ
4.1.
Критерии выбора модуляционных форматов при цифровой передаче данных
Для транспортировки информации на расстояние с помощью радиоволн отведенного диапазона необходима модуляция несущего гармонического колебания высокой частоты низкочастотным сигналом, взаимно-однозначно отображающим передаваемое сообщение. Если не касаться достаточно экзотических вариантов, осуществимых только на волновом уровне (поляризационная, пространственная модуляция), в арсенале разработчика системы связи присутствуют три традиционные разновидности модуляции: амплитудная, частотная, фазовая (последние две можно трактовать как одну — угловую) со, всеми их комбинациями и частными версиями. Как и вообще в инженерном проектировании, при предпочтении того или иного способа модуляции приходится искать компромисс между конфликтующими требованиями. В первую очередь речь идет о разумном использовании радио- частотного ресурса: с одной стороны, избранный вид модуляции должен обеспечивать необходимую достоверность передачи, с другой — обладать достаточной спектральной эффективностью, т.е. распоряжаться выделенным участком диапазона с должной экономностью. Противоречивость этих требований очевидна: как следует из фундаментальных положений теории связи, при прочих равных условиях качество передачи возрастает с расширением спектра сигнала, тогда как стремление улучшить показатели абонентской емкости (см. ~ 5.4), электромагнитной совместимости и удельной (приходящейся на единицу полосы) скорости передачи, наоборот, подталкивает к бережливости в расходовании предоставленного частотного ресурса.
Оставляя в стороне
сходящие со сцены системы первого поколения (NMT, AMPS и др.), в которых речевые
сообщения передаются с помощью обычной аналоговой ЧМ, обсудим подходы выбору дискретных форматов модуляции
(манипуляции), характерные для цифровых стандартов мобильной связи второго
и третьего поколений. В качестве общей модели сигнала пример последовательность одинаковых по форме импульсов, повторяющихся с постоянным интервалом.
В простейшем случае бинарной фазовой манипуляции- БФМ (в англоязычной литературе BPSK — binary phase shift keying) — посылки полагаются прямоугольными и примыкающими друг к другу, т.е. имеющими длительность Л, а фазы у, принимают лишь 2 возможных значения: 0 или и. Таким образом, каждая посылка передает один двоичный символ и при фиксированной длительности Л и мощности сигнала БФМ реализует наиболее помехоустойчивый способ двоичной телеграфии, так как импульсы с фазами 0 и л являются противоположными, т.е, максимально удаленными. В отношении же расходования частотного ресурса описанная версия БФМ оказывается чрезвычайно неэффективной. Дело в том, что спектр мощности сигнала (4.1) совпадает по форме с энергетическим спектром посылки Я,(1), и когда последняя прямоугольна, убывает с частотой ( весьма медленно— пропорционально 1/( . Если, как это часто делается в техника связи при регламентации использования радиоспектра, измерять полосу сигнала шириной окна М„, в котором удерживается не менее 99% излучаемой мощности, для БФМ получится цифра, многократно превосходящая традиционный ориентир 1/Л. Af» 18,5/Л. По этой причине БФМ с прямоугольными посылками не применяется в цифровой мобильной телефонии.
Для повышения спектральной эффективности можно наметить несколько путей. Простейший из них состоит в увеличении длительности прямоугольной посылки Л с сохранением прежней скорости передачи R, в числе бит на единицу времени. При БФМ один бит передается за время Ть = Л, так что R, = 1/Т,. Для удержания этой скорости при "удлинении" посылки следует увеличить число возможных значений фазы у,. Так, при удвоении длительности посылки (Л = 27,) в течение временного отрезка Л придется передавать 2 бита информации, т.е. 4 различных сообщения, что может быть достигнуто за счет использования четырех разрешенных значений фазы вместо двух, например О, п, н/2, -л/2. Та- кой способ манипуляции называют квадратурной ФМ — КФМ
(QPSK — quadrature phase shift keying). Можно видеть, что КФМ в 2 раза экономнее БФМ в отношении использования частотного ресурса, поскольку имеет спектр той же формы, но суженный вдвое за счет двукратного растяжения посылки. Особо подчеркнем, что указанный выигрыш достигнут без ухудшения помехо- устойчивости приема. В самом деле, пусть энергия посылки при БФМ равна Е,. Тогда евклидово расстояние между противоположными посылками (геометрически представляющими собой противоположные векторы длины JEД ), определяющее вероятность их перепутывания, составит 2,Е(рис. 4.1, а). При КФМ четырем сообщениям отвечает четверка биортогональных векторов длины 2Е~ (рис. 4.1, б), так как при неизменной мощности энергия посылки Eq удвоится по сравнению со случаем БФМ за счет удвоения длительности: Е„= 2Е~. При этом расстояние между соседними векторами, определяющее наибольшую из вероятностей перепутывания сообщений, останется прежним (j2Eq --2 )Е~ ), что и означает отсутствие сколько-нибудь заметного ухудшения помехоустойчивости приема при переходе от БФМ к КФМ. Не составляет труда убедиться, что при дальнейшем увеличении длительности посылки требование поддержания постоянства скорости приведет к сближению соседних векторов. Так,

утроение длительности без снижения скорости означает переда- чу одной посылкой восьми сообщений, так что трехкратный рост энергии посылки по сравнению с БФМ будет нивелироваться уменьшением угла между соседними сигналами до 45' (рис. 4.1, в), т.е. уменьшением минимального евклидова расстояния до j3E~(2 — н2) Таким образом, а данном траккратный выигрыш в полосе приобретается ценой энергетических потерь порядка 3,5 дБ (именно таким должно быть увеличение энергии, компенсирующее сближение векторов и снижающее вероятность ошибки до прежнего уровня). Дальнейшее повышение спектральной эффективности подобным способом окажется тем более невыгодным в плане энергозатрат: М-кратный выигрыш в полосе приличной ФМ будет сопровождаться энергетическим проигрышем в у = раз. М(1 - cos)
В принципе существует возможность определенного снижения упомянутых энергетических потерь за счет оптимизации созвездия сигнальных векторов на плоскости, максимизирующей минимальное расстояние между сигнальными векторами. При этом последние имеют неодинаковую длину, т.е. фазовая манипуляция дополняется параллельной амплитудной. Подобные форматы, известные под названиями амплитудно-фазовая и квадратурная амплитудная манипуляции (АФМ и KAM), широко распространены во многих телекоммуникационных сетях (обельная, радиорелейная связь и т. д.). Однако специфика систем беспроводной мобильной телефонии состоит в исключительной важности эффективного энергосбережения, продлевающего срок автономной (без подзарядки или смены батарей) работы портативного терминала и способствующего коммерческой привлекательности его массогабаритных характеристик. По этим причинам многократная (с числом фаз 16 и более) ФМ наряду с АФМ и КАМ не рассматриваются как приемлемые альтернативы для организации радиоинтерфейсов сетей мобильной связи, хоти восьмиуровневая ФМ (8-PSK) избрана как инструмент увеличения скорости передачи в системах второго поколения в рамках спецификации EDGE (см. Я 12.1).
4.2.
Модуляционные форматы цифровых стандартов сотовой связи второго и третьего
поколений
Различные модификации КФМ находят самое широкое применение в сетях цифровой мобильной связи как второго, так и третьего поколений. Мотивами усовершенствований по сравнению с базовым вариантом КФМ служат, с одной стороны, все та же заинтересованность в компактном спектре, а с другой— стремление к оптимизации энергетического режима усилителя мощности передатчика подвижного терминала. Поясним подробнее смысл последнего фактора.
Энергопотребление передатчика в значительной мере зависит от режима оконечного усилителя мощности или, иначе говоря, от пик-фактора сигнала, равного отношению его пиковой и средней мощностей. Наиболее благоприятным считается режим класса С, когда активный элемент усилителя постоянно находится вблизи точки насыщения, выполняя, по существу, функции ключа, и требования к его линейному динамическому диапазону минимальны. Для приближения к подобному режиму передаваемый сигнал должен быть свободен от глубокой амплитудной модуляции, т.е. иметь пик-фактор, близкий к единице. Данное условие, в свою очередь, означает, что скачки мгновенной фазы, сопровождающие переход от данной посылки к последующей, должны быть по возможности минимизированы.
Обратимся за подтверждением к рис. 4.2. Когда значения передаваемых символов 0 и 1 при БФМ (рис. 4.2, а) равновероятны, в среднем в половине переходов между последовательными посылками наблюдается скачок фазы на 180', т.е. смена полярности на противоположную. Изменение мгновенной комплексной огибающей от А до — А или наоборот должно быть без искажений передано усилителем мощности, которому тем самым навязывается чрезмерное требование в части линейного динамического диапазона (2А). Поскольку при линейной передаче перепадов большая часть мощности рассеивается на активном элементе усилителя, становится понятным желание снизить частоту и размах скачков фазы в манипулированном сигнале. Переход от БФМ к стандартной КФМ (рис. 4.2, б) с сохранением прежней мощности не ослабляет требований к динамическому диапазону усилителя, поскольку максимальные скачки фазы в 180' сохраняются, хотя и случаются значительно (примерно вдвое) реже.

Смягчение требований к динамическому диапазону пере- датчика достигается в формате КФМ со сдвигом — КФМС (OQPSK — offset QPSK), для понимания смысла которого разумно сначала ввести в (4.1) начальную фазу в л/4 (разумеется, это никак не повлияет на свойства КФМ и лишь повернет целиком диаграмму рис. 4.2, б на 45'), а затем переписать результат в форме: бинарные символы, принимающие значения +1 и -1. Как видно, КФМ- сигнал можно интерпретировать как сумму двух квадратурных БФМ- сигналов, что дает возможность демодулировать каждую из последовательностей символов (а,),(Ь/) отдельно от другой, поскольку синусная и косинусная квадратурные компоненты ортогональны и не создают друг другу перекрестных помех при приеме. Сдвинем теперь синусную квадратурную составляющую во времени на половину длительности посылки, придя к результату сохраняющему ортогональность квадратурных компонент и, следовательно, все характеристики обычной КФМ в части качества передачи данных. Теперь, однако, изменения бинарных символ лов, манипулирующих квадратурные несущие, происходят неодновременное: в момент смены символа а, символ другой квадратуры Ь, остается неизменным и наоборот. Благодаря этому при враждой смене символа а, или b; сигнальный вектор на рис. 4.2, б может перейти только в соседний, но никак не в противоположный. Тем самым требуемый линейный динамический диапазон
Г2А оказывается в ~2 2раз меньшим по сравнению со случаем БФМ или стандартной КФМ. Именно по этой причине КФМС была избрана для построения обратного (от МС к БС) канала в СОМА- стандарте второго поколения IS-95 [6, 24].
Другой вариант достижения той же цели реализован в цифровых стандартах D-AMPS (США, известен также под названиями IS-136 и US-TDMA) и PDC (Япония, прежнее наименование JDC) [13], где вместо сдвига посылок введен поворот на угол л/4 алфавита значений фаз при переходе от четных посылок к нечетным. Благодаря такому смещению при принимает значения из множества 4 (пунктир на рис. 4.2, в). Разумеется, на приемной стороне этот сдвиг легко учитывается, так что демодуляция выполняется практически так же, как при обычной КФМ. Подобный вид КФМ получил название л/4-КФМ (л/4-QPSK). Его преимущество в сравнении с КФМС состоит именно в отсутствии усложнений демодулятора, свойственных КФМС, хотя в отношении смягчения требований к линейному динамическому диапазону л/4-КФМ не столь эффективна: переходам на угол соответствует перепад комплексной огибающей, равный и примерно в 1,31 раза превышающий аналогичный показатель КФМС.
Рассмотренные трансформации КФМ никоим образом не влияют на спектральные характеристики модулированного сигнала, которые в рамках случайной модели передаваемого потока данных определяются исключительно формой посылки. Поскольку причиной медленного спадания спектра мощности сигналов (4.1) и (4.2) с частотой является разрывность прямоугольной посылки, радикального сужения спектра можно добиться только за счет сглаживания ее формы. Если, в частности, принять в (4.2) за посылку импульс с огибающей в виде положительной полуволны косинуса (см. рис. 4.3) с амплитудой Г2А

то КФМ преобразуется в свой подвид, известный как минимальная частотная манипуляция — МЧМ (MSK — minimal shift keying) [13].
Для того чтобы убедиться в преимуществах МЧМ и попутно выяснить корни ее наименования, найдем комплексную огибающую S(t) сигнала (4.2) с формой посылки, задаваемой (4.3). При этом в силу полной однородности поведения сигнала во времени достаточно рассмотреть лишь два смежных отрезка Используя элементарную тригонометрию, формулу Эйлера и бинарность символов получаем
Как показывает (4.4), действительная огибающая Я(С(=(о(С)/=А постоянна и, , МЧМ не сопровождается амплитудной модуляцией, обеспечивая равенство пикфактора сигнала единице и, как результат, оптимальность режима усилителя мощности передатчика.
Другой вывод из (4.4) состоит в том, что рассматриваемый вид модуляции сводится, по существу, к бинарной частотной манипуляции прямоугольных посылок длительности Л/2, поскольку линейное изменение фазы с угловым коэффициентом +л/Л означает сдвиг частоты на +1/2Л. Принципиальным является то, что переключение частоты между посылками каждые Л/2 с происходит без скачков фазы, т.е. МЧМ является модуляцией с непрерывной фазой. В этом легко убедиться, подставив t =0 в обе строки (4.4) и придя к одному и тому же результату: S(t =0 ) =а, = S(t =0'), где верхние индексы "—" и "+" символизируют приближение к точке t = 0 соответственно слева и справа.
Таким образом, при любом текущем передаваемом символе очередная посылка начинается с той фазы, которая "набежала" в течение предыдущей. Сказанное иллюстрируется "деревом" траекторий фазы на рис. 4.4. В течение каждого отрезка [/сЛ/2, (k+1)d /2] фаза линейно растет или убывает в соответствии с текущим приращением частоты +1/2Л (определяемым, в свою очередь, комбинацией символов а,, b, сигнала (4.2) на
данном отрезке). Значения фазового угла в момент (k+1)A/2, отвечающие двум возможным частотам, отличаются ровно на к. При этом любая из возможных траекторий фазы оказывается непрерывной функцией.
Отсутствие разрывов фазы обеспечивает спектру МЧМ значительно большую степень компактности по сравнению со стандартной КФМС: спектр мощности МЧМ сигнала убывает примерно пропорционально 1/г, так что занимаемая им полоса сокращается более чем на порядок:
Резервы дальнейшего сжатия спектра модулированного сигнала кроются в устранении разрывов не только самой фазы, но и ее производных (частоты, скорости изменения частоты и т.д.). Иными словами, линейно-ломаные траектории на рис. 4.4 могут быть заменены более гладкими. В стандарте GSM применен именно такой вариант модуляции — гауссовская МЧМ (GMSK — Gaussian MSK) [13, 25], при которой закон изменения фазы в течение посылки повторяет ход гауссовский интегральной функции распределения, чем обеспечивается плавность изменения фазы и частоты, а значит, высокая степень компактности спектра. Технически гауссовская (как и обычная) МЧМ может быть реализована разными средствами, однако для объяснения смысла ее параметров согласно спецификации GSM разумно считать, что исходный поток битовых прямоугольных посылок длительности Т~ пропускается через низкочастотный фильтр с гауссовский амплитудно-частотной характеристикой и полосой
В (на уровне — 3 дБ), после чего сглаженный сигнал модулирует частоту задающего генератора. В стандарте жестко зафиксировано значение ВТ~ = 0,3, отвечающее полосе
0,92
С упрощениями, игнорирующими второстепенные детали, дерево траекторий фазы гауссовский МЧМ показано на рис. 4.5.
Отметим, что в эволюции видов модуляции от БФМ до M4M обмен между спектральной эффективностью и достоверностью

эффективности не сопровождалось снижением минимального евклидова расстояния в сигнальном созвездии, что было продемонстрировано на примере сравнения КФМ с БФМ. Случай raycсавской МЧМ несколько выпадает из этого ряда в связи с тем, что неограниченность отклика гауссовского фильтра во времени не позволяет, строго говоря, трактовать данный вид модуляции как сглаженную версию КФМС (условия сводимости ЧМ с непрерывной фазой к БФМ или КФМ приведены в [26]). В литературе можно встретить упоминание об энергетическом проигрыше гауссовский МЧМ относительно БФМ в 0,46 дБ [27], однако не исключено, что ее теоретический потенциал выше с учетом возможности де- модуляции сообщения "в целом", т.е. на интервале, охватывающем несколько посылок (например, с помощью алгоритма Витерби, см. гл. 6).
Приведем итоговую таблицу, связывающую ширину полосы Л модулированного сигнала со скоростью передачи данных R, (бит/с) для рассмотренных форматов.
Как показывает приведенный обзор, даже в относительно узких рамках цифровых стандартов сотового радиотелефона применяемые методы модуляции отличаются заметным разнообразием. Их перечень станет еще более обширным, если обратиться и к другим телекоммуникационным системам (модемной, радиорелейной, спутниковой связи, персонального вызова, бесшнурового телефона и т.п.). Все это лишний раз свидетельствует

о неоднозначности и многовариантности задач идеологическою проектирования и существовании параллельных путей достижения оптимальных системных показателей.
5. ОРГАНИЗАЦИЯ МНОЖЕСТВЕННОГО ДОСТУПА И ДУПЛЕКСНОГО
РЕЖИМА СВЯЗИ
Понятие множественного доступа подразумевает совокупность мер по обеспечению возможности параллельной работы многих пользователей в рамках частотно-временного ресурса, выделенного данной системе. Отождествляя каждого абонента с некоторым физическим каналом, можно сказать, что конкретная технология множественного доступа есть способ распределения ограниченного частотно-временного ресурса между каналами. Пусть s(t) — сигнал, с помощью которого реализуется i-й канал связи, ( = 1,2,...,К, где К- полное число каналов системы. Придерживаясь линейной модели физической среды распространения, игнорируя несущественные в данном контексте эффекты многолучевости и считая сопутствующий шум n(t) аддитивным, колебание, наблюдаемое приемной стороной, можно представить в форме соответственно затухание и задержка t-го сигнала на трассе распространения. Каждый из сигналов, входящих в первое слагаемое этого выражения, содержит специфическое сообщение, передаваемое /-м пользователем (или адресованное ему). Задача приемной стороны состоит в выделении сообщения конкретного абонента, причем сторонние сигналы при этом выступают в роли мешающих.
Как известно, для линейной селекции любого компонента суперпозиции сигналов с устранением влияния остальных компонентов необходима и достаточна линейная независимость всех сигналов [28]. Ортогональные сигналы, являющиеся линейно независимыми и определяемые равенством ной и частотный ресурс, отводимый системе, s,(f) — спектр i-ro сигнала, разделяются без взаимных помех обычным корреляционным приемником [20]. Ортогональность канальных сигналов может быть обеспечена за счет их частотного или временного разноса, либо подходящего кодирования. В соответствии с этим установилась и классификация методов множественного доступа.
5.1.
Множественный доступ с частотным разделением каналов
Системы множественного доступа с частотным разделением каналов (МДЧР
или РОМА, см. 2.1) строятся таким
образом, что каждому абоненту на время сеанса связи выделяется частотный канал с
полосой М, в пределах общего частотного диапазона системы (р, не совпадающий ни с одним из каналов,
уже предоставленных активным абонентам. При этом спектры канальных
сигналов не перекрываются (рис. 5.1, а), чем и обеспечивается выполнение условия
ортогональности. Прямоугольник со сторонами Мр и Тр на рис. 5.1, б характеризует
общий частотно-временной ресурс системы. Как видно, при РОМА этот общий ресурс
"нарезается" на К (по числу абонентов) горизонтальный
полосок, занимающих каждая весь доступный временной ресурс и только Кью часть
частотного.

Метод РОМА используется во всех аналоговых ССМС, т.е. системах первого поколения, причем ширина полосы абонентского канала для них составляет df, =10...30 кГц. Например, в стандарте AMPS частотный ресурс, отводимый системе, представляет собой два участка: в диапазоне 869...894 МГц для передачи информации от БС к МС (прямой канал)) и 824...849 МГц для передачи информации в обратном направлении (обратный канал). Таким образом, дуплексный разнос по частоте составляет 45 МГц. Каждому частотному каналу отводится полоса Af, =30 кГц, так что с учетом защитных интервалов в пределах выделенного диапазона размещается 832 канала. Частотным каналам присвоены номера от 1 до 799 и от 991 до 1023, причем центральная частота канала (в МГц) связана с его номером / соотношениями:
• обратный канал (uplink)— по-прежнему Спектральный разнос абонентских каналов полностью исключает влияние каналов друг на друга лишь теоретически. На практике же избежать возникновения межканальных (внутрисистемных) помех невозможно, например, из-за неидеальности разделительных фильтров в приемнике, в результате которой часть энергии сигнала одного канала просачивается в соседний. Ослабить влияние межканальных помех можно соответствующим выбором манипуляции сигналов (уменьшением "внеполосных" излучений) и фильтров (улучшением подавления в соседнем канале). Еще одним способом снижения уровня взаимных помех является введение защитных интервалов между частотными каналами, что, однако, приводит к уменьшению полосы частот, используемой для связи, т.е. снижению эффективности использования спектра.
• прямой канал (downlink)
Заметим, что в дуплексную связь, строго говоря, вовлечены две полосы М, — одна для прямого, а другая для обратного каналов.
5.2. Множественный доступ с временным разделением каналов
Множественный доступ с временным разделением (МДВР или ТОМА, см. 2.1) в традиционном понимании заключается в том, что каждому абоненту системы на время сеанса связи выделяется временной интервал Т, (временной канал) в пределах общего временного ресурса системы Тр (цикла или кадра системы), не совпадающий ни с одним из интервалов, уже предоставленных APY- гим активным абонентам. Тем самым каждый канальный сигнал размещается в своем индивидуальном окне (слове) без перекрытия с другими (см. рис. 5.2, а). Вместе с тем спектры сигналов абонентов могут занимать всю выделенную системе полосу частот Мр и полностью перекрываться. Иллюстрацией подобного ресурсного распределения служит рис. 5.2, б, из которого видно, что суммарный частотно-временной ресурс "нарезан" в виде к вертикальных полос, каждая из которых занимает весь доступный частотный диапазон и лишь Кью часть отведенного времени.
В идеале несовпадение канальных сигналов во времени обеспечивает их ортогональность, а значит, и исключает влияние друг на друга. На деле из-за ограниченности полосы системы переходные процессы от сигналов предыдущих каналов к начал появления последующих могут не закончиться и, складываясь с последними, создавать перекрестные (межканальные) помехи. Уменьшить влияние соседних каналов, т.е. уровень межканальных помех, удается способом, аналогичным описанному в предыдущем подразделе, — введением защитных временных интервалов, что, в свою очередь, приводит к уменьшению диапазона, в течение которого возможна передача информации, т.е. к фактическому снижению скорости передачи.

Оценим возможное число ТDМА-каналов. При скорости передачи информации по одному каналу R, за время одного цикла работы системы может быть передано R, Тр бит информации. Тогда общее количество информации, переданной во всех абонентских каналах, составит величину что полностью совпадает с оценкой (5.1) числа R( '
каналов для систем с FDМА.
В цифровых стандартах второго поколения О-AMPS, GSM и PDC находит применение комбинация частотного и временного разделения РОМА/ТОМА, в рамках которой каждый частотный канал разбивается на временные слоты. При этом каждому абонентскому каналу выделяется лишь часть и частотного, и временного ресурсов. Сказанное иллюстрирует рис. 5.2, в, из которого видно, что суммарный системный ресурс "нарезается" теперь не на полоски, а на прямоугольники, оба размера которых меньше максимально возможных. Проведя несложный расчет, подобный проделанному для РОМА и ТОМА, легко видеть, что их комбинация не может дать какого-либо теоретического выигрыша в числе каналов при фиксированном ресурсе, поскольку последний жестко лимитирует число ортогональных сигналов. Основания для практического использования сочетания в большей мере связаны с технологической политикой отдельных производителей, нежели с какими-либо потенциальными преимуществами.
Обратимся к примеру реализации множественного доступа с временным разделением в эфирном интерфейсе GSM. Как уже упоминалось ранее, исходный стандарт GSM предусматривает работу в двух диапазонах частот — 890...915 МГц для передатчиков МС и 935...960 МГц для передатчиков БС. В стандарте используется узкополосный (ширина полосы канала связи 200 кГц) многостанционный доступ, сочетающий частотное и временное разделение каналов. В рамках частотного разделения стандарт с учетом защитных полос содержит 124 дуплексных канала с разносом частот приема и передачи в 45 МГц. Центральная частота канала (в МГц) связана с его номером соотношениями:
• обратный канал
• прямой канал
В рамках временного разделения передача информации по каналу связи осуществляется в течение одного из 8 временных интервалов (слотов) длительностью 577 мкс на каждой из 124 несущих. Организационно 8 слотов объединяются в кадры (английский термин frame) длительностью 4,615 мс, которые, в свою очередь, последовательно группируются в мультикадры, суперкадры и гиперкадры. Длительность гиперкадры определяет период последовательности кадров во временной структуре стандарта GSM. Общая структура кадров и количественные соотношения между ее элементами будут представлены в ~ 10.2. Следует отметить, что номер кадра в пределах гиперкадры используется как входной параметр при криптографической защите передаваемой информации.
5.3.
Множественный доступ с кодовым разделением каналов
5.3.1. Варианты реализации кодового разделения
В основе множественного доступа с кодовым разделением (МДКР или СОМА, см. ~ 2.1) лежит ориентация на широкополосную (spread spectrum) идеологию построения систем передачи информации, предусматривающую сознательное и многократное расширение полосы передаваемого сообщения по сравнению с той, которая характерна для традиционных узкополосных систем. Искусственное расширение спектра в подобных системах, как правило, реализуется одним из двух основных способов:
• прямое
расширение — direct
sequence spread spectrum (DSSS);
• скачкообразное
изменение несущей частоты — frequency hop spread spectrum
(FHSS).
В первом варианте информационное сообщение манипулирует псевдослучайную последовательность (ПСП), состоящую из элементов (чипов) длительности Т причем длительность чипа многократно (в И раз) меньше длительности Т передаваемого информационного бита или символа (посылки, см. 4.1):
Величина N непосредственно характеризует степень расширения полосы по сравнению с полосой первичного сообщения и потому называется коэффициентом расширения спектра (в англоязычных текстах spreading factor или processing gain).
Упомянутая манипуляция ПСП c(t) передаваемым потоком данных D(t) обычно реализуется их простым перемножением (см. рис. 5.3, а). Диаграммы рис. 5.3, б — г иллюстрируют содержание процедуры прямого расширения для примера двоичной передачи и бинарной ПСП. На рис. 5.3, в показана периодическая бинарная ПСП, чей период, содержащий И = 8 чипов, совпадает с длительностью одной посылки сообщения (в общем случае период ПСП может быть произвольным, в частности, значительно большим длительности информационной посылки; более того, ПСП вообще может быть апериодической). Результат прямого расширения очевиден (рис. 5.3, г): если информационная посылка несет нулевой бит (положительная полярность D(t), рис. 5.3, б), на выходе перемножителя присутствует первоначальная версия ПСП. При передаче посылкой значения 1 текущего бита полярность ПСП меняется на противоположную. Сигнал после перемножителя подается на стандартный модулятор несущей (БФМ, КФМ и т.д.).
Как можно видеть, процедура прямого расширения спектра не ухудшает помехоустойчивости двоичной передачи в гауссовском канале, оставляя противоположными сигналы, отвечающие значениям 0 и 1 передаваемого бита.
При использовании второго способа расширения спектра каждый символ информационного сообщения должен передаваться с помощью набора дискретных частот, задаваемого определенной последовательностью. Подробное описание FHSS технологии расширения спектра можно найти в [29].
В существующих и разрабатываемых на перспективу системах сотовой связи преимущественно применяется прямое расширение спектра, реализуемое либо в синхронном, либо в асинхронном варианте. Различия этих двух модификаций DSSS весьма значительны. Первая может быть применена тогда, когда есть возможность синхронизировать между собой все индивидуальные адресные последовательности (сигнатуры), присвоенные отдельным абонентам так, чтобы на приемной стороне сигналы разных абонентов не имели взаимных временных сдвигов. Подобная ситуация характерна для линии "вниз" ССМС (от БС к МС), поскольку сигналы БС, посланные разным МС строго одновременно, приходят на отдельную МС по одной и той же трассе, т.е. без взаимных задержек.
В линии "вверх" обеспечение синхронизма сигналов разных МС, принимаемых БС, хотя и не отрицается теоретически, довольно затруднительно и не всегда технологически оправданно из-за случайного расположения МС относительно БС в пределах

соты и, следовательно, случайных взаимных задержек сигналов. Для подобных ситуаций характерно применение асинхронной версии DSSS, не предполагающей взаимной временной привязки сигнатур индивидуальных абонентов.
Преимущества СОМА по отношению к FDMA и ТОМА можно условно разбить на две группы. Первую из них составляют те, которые отличают любые широкополосные (spread spectrum) системы: высокая помехоустойчивость к сосредоточенным и широко помехам (в том числе преднамеренным), возможность эффективной работы в условиях многолучевого распространения, широкий диапазон доступных мер криптозащиты, высокая точность измерения частотно-временных параметров, хорошая электромагнитная совместимость с системами радиосвязи и вещания и др. Вторая группа непосредственно связана с аспектами множественного доступа: большая абонентская емкость на соту (сектор), "мягкий" характер снижения качества связи при возрастании интенсивности трафика, простота реализации режима "мягкой" эстафетной передачи.
Рассмотрим подробнее вопрос об оценке возможного числа пользователей в системах с кодовым разделением.
5.3.2. Оценка числа пользователей на соту
Синхронный вариант СDМА с использованием ортогональных сигналов, разумеется, не может иметь каких-либо принципиальных преимуществ по сравнению с РОМА и ТОМА в максимальном числе пользователей, поскольку последнее есть порогу число ортогональных сигналов, лимитируемое только размерностью сигнального пространства, т.е. частотно-временным ресурсом (Мр, Тр) . Способ построения ортогонального семейства )разнесение по частоте, времени или соответствующее кодирование) не влияет на количество сигналов в семействе. Асинхронный же вариант СОМА (как и синхронный при части абонентов, превышающем возможное число ортогональных сигналов) позволяет более гибко, чем РОМА и ТОМА, эксплуатировать эффекты пространственного затухания радиоволн для повторного использования ресурса в системах с сотовой апологией.
При корреляционной обработке отношение "сигнал — совокупная помеха" на выходе приемника системы с кодовым разделением может быть записано в виде соответственно спектральные плотности мощности внутрисистемных помех и белого шума; энергия, приходящаяся на один бит информационного сообщения; — мощность абонентского сигнала на приемной стороне. учетом обязательного в асинхронных системах с СDМА выравнивания мощностей абонентских сигналов на входе приемника спектральная плотность внутрисистемных помех, создаваемых ; — 1 посторонними пользователями, может быть оценена как [30]
Данная
оценка опирается на аппроксимацию взаимной помехи случайным шумом со средней
мощностью (К -1)PR, равной сумме мощностей всех сторонних сигналов.
Полагая внутрисистемную помеху преобладающей над тепловым шумом из (5.2) получаем откуда оценка предельного числа KR пользователей
Как можно видеть, при q не ниже 5...8 дБ (уровень превышения полезным сигналом помехи, достаточный для достижения вероятности ошибки на символ в пределах тысячных долей) максимальное число абонентов, обеспечиваемое рамками СОМА, заметно меньше, чем при использовании РОМА и ТОМА (см. (5.1)). Учтем теперь, что в форматах РОМА и ТОМА запрет на повторное использование каналов в примыкающих сотах вынуждает дробить ресурс между ячейками одного и того же кластера (см. 2.5). Следствием этого является уменьшение числа абонентов на соту в и, раз, где и, — количество ячеек в кластере. Так, при весьма типичном 7-элементном кластере (см. рис. 2.3, б) удельное число абонентов на соту составит.
В то же время при технологии СОМА можно пойти на повторное использование всего доступного ресурса в соседних сотах, платой за что окажется увеличение уровня внутрисистемных помех, создаваемых теперь не только сигналами своих (обслуживаемых данной ячейкой) абонентов, но и сигналами абонентов "чужих" БС. При этом вклад "просачивания" из соседних ячеек в суммарную взаимную помеху может оказаться заметно слабее составляющей, обусловленной "своими" (а значит, более близкими ~ БС) абонентами, за счет крутого спада принимаемой мощности в зависимости от расстояния (обратно пропорционально примерно четвертой степени расстояния для зон плотной городской за- стройки или густой растительности — см. g 3.3). По оценкам многих источников [30, 31) "соседние" ячейки увеличивают общий уровень взаимной помехи примерно в 1,5 раза. Отсюда сотовая емкость СDМА системы может быть оценена как следует, что СDМА обладает почти двукратным выигрышем по этому показателю по отношению к FDМА и ТОМА. В том же направлении действует и учет фактора речевой активности пользователя. Дело в том, что в обычном телефонном разговоре каждый из участников тратит определенную часть времени на паузы, выслушивая собеседника и осмысливая содержание диалога. Фактор речевой активности ар численно задает долю именно речевой фазы одного участника в общей продолжительности соединения. Стандарт GSM уже определенным образом эксплуатирует рассматриваемый фактор, однако исключительно в целях энергосбережения, но не увеличения абонентской емкости. Хотя теоретически такая возможность не исключается, на деле мгновенная передача освобождающегося в паузе физического частотного или временного канала другому абоненту с последующим возвратом вряд ли заслуживает реализации в силу резкого усложнения протоколов и невозможности согласования пауз в разговорах индивидуальных абонентов. В рамках же СОМА высвобождение ресурса в паузах разговора автоматически снижает уровень взаимной помехи и тем самым способствует увеличению емкости системы. В первом приближении можно учесть фактор ар, заменив спектральную плотность мощности внутрисистемной помехи значением, усредненным по всей продолжительности разговора. Тогда с учетом (5.5) оценка числа абонентов на соту примет вид что в сравнении с (5.4) означает более чем четырехкратный выигрыш в абонентской емкости по сравнению с РОМА и ТОМА технологиями.
В некоторых источниках приводятся еще более впечатляющие цифры, подтверждающие достоинства СОМА. Обычно они базируются на предположении о секторизация соты, естественно увеличивающей сотовую емкость в число раз, соответствующее количеству секторов [32]. Не следует забывать, однако, что выигрыш за счет секторизация реализуем в рамках всех технологий множественного доступа и поэтому должен исключаться при корректном их сопоставлении.
Отметим, что полученные выше оценки являются всего лишь первичными ориентирами, поскольку опираются на многочисленные приближения и допущения. Реальное проектирование СDМА систем должно опираться на более глубокий анализ [33], с необходимостью сопровождаемый всесторонним моделированием и полевыми испытаниями.
5.3.3. Оптимизация сигнатур при кодовом разделении с прямым расширением спектра
Обратимся теперь к вопросу о выборе семейства адресных последовательностей, приписываемых абонентам ССМС и задающих физические каналы СDМА -системы. Очевидно, что наилучшим семейством адресных последовательностей (сигнатур) будет то, в котором обеспечивается наименьший уровень взаимных помех. Предположим вначале, что все сигнатуры периодичны с одинаковым периодом в числе чипов И. Поскольку отклик коррелятора на входное воздействие представляет собой отсчет корреляционной функции, то требование малого уровня взаимной помехи трансформируется в ограничение на выбросы нормированной взаимной корреляционной функции
В этом
выражении а, — /-й символ кодовой последовательности комплексных
амплитуд, определяющей закон манипуляции чипов k-й сигнатуры. Наиболее интересен
случай фазовой манипуляции и потому действительные амплитуды всех чипов приняты
одинаковыми: (избранная
нормировка, разумеется, не ограничивает общности). Аргументом т взаимной
корреляционной функции является относительный временной сдвиг сигнатур,
полагаемый равным целому числу длительностей одного чипа. Если говорить об
асинхронном варианте СОМА, характерном, например, для обратного канала (от МС к
БС), то возможным диапазоном сдвигов т можно считать
.
Теперь требование малого уровня взаимной помехи можно формализовать как минимизацию наибольшего выброса взаимных корреляций всех пар сигнатур при любых относительных сдвигах:
Наряду с этим традиционно желателен и малый уровень боковых лепестков периодической автокорреляционной функции (ПАКТ) всех последовательностей в ансамбле, т.е.
Выполнение последнего условия необходимо для осуществления многолучевого разнесения (см. гл. 6), а также устранения грубых промахов на этапе синхронизации опорного колебания коррелятора с принимаемым сигналом.
Предъявленные требования естественным образом объединяются в виде следующего минимаксного критерия качества ансамбля сигнатур
R, = max(R,, R,} = min .. (5.6)
В общем случае, т.е. при ориентации на асинхронно- адресный принцип функционирования системы, потенциал минимизации уровня R, не беспределен и ограничен соотношениями, связывающими минимально достижимое значение R, с объемом ансамбля К, длиной кодовых последовательностей N и типом алфавита, которому принадлежат символы последовательности 4aД ) Известен целый ряд соотношений, определяющих нижнюю
границу R, при ограничениях на алфавит и длину N [34]. Простейшим из них и в ряде случаев точным является граница Велча Ансамбли последовательностей, удовлетворяющие упомянутым границам, получили название оптимальных.
В классе бинарных последовательностей, алфавит символов которых ограничен множеством, известно несколько представителей оптимальных ансамблей: Голда, Касами, бент- функций и др. [34, 35].
Подчеркнем, что выбор ансамбля, оптимального в выше- упомянутом смысле, гарантирует малый уровень внутрисистемных помех при СDМА с прямым расширением далеко не во всех случаях. Причиной этого служит предположение о периодичности сигнатур: в упомянутых системах периодичность нарушается за счет манипуляции сигнатурной ПСП случайным потоком данных (см. рис. 5.3). Тем самым условие (5.6) оказывается лишь необходимым, но не достаточным. В ситуациях, когда на длине ин- формационной посылки укладывается относительно большое число периодов сигнатуры, нарушения периодичности не приведут х заметному росту выброса взаимной помехи по сравнению с (5.7). Когда же период сигнатуры близок к длине посылки или превышает ее, критерий (5.6) перестает быть достаточным. Поэтому во многих современных СDМА системах (см. далее IR. 11, 12) выбор сигнатурных ансамблей осуществляется не с использованием обсужденного выше детерминистического подхода, а на основе трактовки сигнатур как случайных последовательностей. При этом уровень взаимной помехи оценивается статистически, как это по существу и сделано в предыдущем параграфе. Многочисленными исследованиями установлено, что при подобном статистическом подходе любые ансамбли, отвечающие простейшим тестам на псевдо случайность, оказываются практически равноценными, что означает широкую свободу выбора конкретного ансамбля сигнатур для проектируемой системы.
Значительно более прозрачными и понятными являются подходы к оптимизации ансамбля адресных сигналов в синхронных СDМА -системах, если допустимо применение сигнатур длины, не меньшей требуемого числа пользователей. При этом синтез сигнатурного ансамбля сведется попросту к построению К < N ортогональных последовательностей, что осуществимо множеством способов, К примеру, в стандарте IS-95 (см. гл. 11) в качестве сигнатур линии «вниз» использованы обычные функции Уолша.
5.4.
Реальная абонентская емкость сотовых систем мобильной радиосвязи
При описании в предыдущих подразделах различных систем подвижной радиосвязи их абонентская емкость, т.е. количество обслуживаемых абонентов, неявным образом определялась числом каналов радиосвязи. Совершенно очевидно, что эти два понятия не являются тождественными. Ограничивать количество обслуживаемых абонентов числом каналов связи представляется нерациональным, поскольку вероятность одновременного выхода на связь всех абонентов системы обычно мала. Следовательно, при наличии каналов связи система, в принципе, способна обслуживать более К абонентов, хотя существует вероятность того, что в некоторых случаях абоненты не получат доступа, и эта вероятность тем больше, чем больше число абонентов по сравнению с количеством каналов связи. Отсюда вытекает двуединая задача, условия которой могут быть сформулированы следующим образом: сколько абонентов может обслужить система, имеющая фиксированное количество каналов связи при заданной вероятности отказа в доступе, либо — какое количество каналов связи в системе необходимо для обслуживания заданного число абонентов при фиксированной вероятности отказа в доступе. Решение поставленной задачи основано на положениях теории массового обслуживания. Действительно, СМР по своей сути является примером системы массового обслуживания, т.е. системы со случайным потоком заявок (вызовов), случайной продолжительностью обслуживания (сеанса связи) и конечным числом каналов обслуживания (связи).
Наиболее общими характеристиками случайного потоки вызовов являются средняя частота их поступления у, измеряемая числом вызовов в единицу времени (например, число вызовов/час), и средняя продолжительность сеанса связи Т, выражаемая в единицах времени. Произведение А = y Т определяет средний трафик (интенсивность трафика, поток нагрузки, общую нагрузку на канал связи), измеряемый в Эрлангах (в честь датского ученого А. К. Эрланга, известного своими работами в области теории телетрафика). Следует отметить, что характеристики нагрузки на канал связи у и Т обычно оценивают на интервале наибольшей загруженности системы, т.е. в час пик.
Число вызовов в течение фиксированного времени t представляет собой дискретную случайную величину, обычно описываемую распределением Пуассона: вероятность поступления k вызовов за время t. Продолжительность сеанса связи (длительность занятости одного канала) т является непрерывной случайной величиной, плотность вероятности которой обычно принимается экспоненциальной (Т — как указывалось, среднее значение г )
В зависимости от того, как ведет себя система, не располагающая свободными каналами на момент поступления новой заявки, различают следующие ее модели [13]:
• система с ограниченным временем ожидания (модель Эрланга А), согласно которой вызов при отсутствии свободного канала ставится в очередь и по истечении фиксированного времени Т — если за это время ни один из занятых каналов не освободился — аннулируется;
• система с отказами, т.е. вызовы, пришедшие в момент отсутствия свободных каналов, аннулируются (модель Эрланга В);
• система с ожиданием, т.е. вызовы становятся в очередь и могут ожидать освобождения канала неопределенно долгое время (модель Эрланга С).
При оценке абонентской емкости системы подвижной радиосвязи обычно применяется модель Эрланга для которой вероятность отказа определяется соотношением [13]
Данная формула, определяющая вероятность отказа в доступе к системе, достаточно громоздка для непосредственного применения. На практике для расчета допустимой нагрузки в Эрлангах для системы связи с каналами при заданной вероятности блокировки Ра используют ее представление либо в виде графика, либо в виде таблицы. Примеры табличного представления последнего соотношения даны в [6, 13].
Алгоритм применения соотношения для Ра, либо его табулированного представления сводится к следующему: для фиксированного количества каналов связи в системе К и заданного значения вероятности отказа Ра находится трафик А, который может быть обслужен в рассматриваемых условиях. Так, при К =30 и вероятности отказа Ра =0,02 система связи может обслужить нагрузку на все каналы, равную 21,93 Эрланга. Если же предположить, что в час пик любой абонент системы производит в среднем 2 вызова со средней продолжительностью связи 5 минут, то трафик на один канал составит 1/6 эрл. Тогда системой может быть обслужено число заявок, равное 21,93: — =131, 6
которым и оценивается реальная абонентская емкость системы.
5.5.
Организация дуплексного режима в мобильных системах
Суммарный частотно-временной ресурс, отпущенный конкретной системе, приходится расходовать не только на организацию множественного доступа, но и на обеспечение дуплексного режима, т.е. параллельного информационного обмена в обоих направлениях: от системы к абоненту и в обратную сторону. В системах мобильной радиосвязи нашли применение частотный и временной дуплекс. В первом варианте, упоминаемом в литературе как FDD (frequency division duplex), дуплексная пара занимает две полосы частот ширина полосы абонентского канала), разделенные некоторым защитным интервалом, называемым дуплексным разносом по частоте. Таким образом, передача и прием информации между абонентами осуществляются на разных частотах. Принцип FDD иллюстрирует рис. 5.4.
На основе FDD построены системы стандартов первого и второго поколений (AMPS, DAMPS, GSM, IS-95 и др.).

При временном дуплексе (TDD — time division duplex) для двусторонней связи используется одна и та же несущая с временным разделением каналов передачи и приема (см. рис. 5.5). Хотя режим TDD нехарактерен для существующих систем сотовой связи, он широко распространен в стандартах бесшнурового телефона (CT2, DECT и др.). Кроме того, ему отводится определенное место в продвигаемых стандартах третьего поколения UMTS и cdma2000 (см. гл. 12).
Рассмотрим типовую структуру каналов системы с TDD, ориентируясь для конкретности на цифры, положенные в основу проекта cdma2000 [37]. Основным элементом канальной архитектуры БС является Тк = 20 мс (рис. 5.6), который разбивается на 8 пар интервалов, предназначенных для организации дуплекса.


Первый
интервал пары имеет длительность Т~ и отводится для передачи. Во втором
(длительности TR ) принимается сигнал МС. Любые
смежные интервалы разделяются защитными промежутками длительности М,
определяемой протяженностью зоны обслуживания. Несложный подсчет показывает, что
при защитную интервале в 52 мкс и точности
синхронизации временных интервалов на базовой станции +3 мкс, максимальный
радиус зоны обслуживания составляет
Мобильные станции имеют сходную с БС структуру кадра, но интервалы передачи и приема меняются местами.
Сравнение двух вариантов дуплексирования приводит к заключению [37], что режим FDD более эффективен при большими размерах сот и высокой скорости передвижения абонентов, тогда как вариант TDD в большей степени подходит для применения в микросотах, т.е. в малых зонах обслуживания абонентов, передвигающихся с невысокой скоростью. Вместе с тем, режим TDD обладает рядом дополнительных достоинств, заслуживающих отдельного упоминания. Поскольку при TDD линии "вверх" и "вниз" занимают одну и ту же полосу частот, характеристики замираний в них имеют высокую степень корреляции, что может быть использовано для упрощения процедур регулировки излучаемой мощности и пространственного разнесения (см. гл. 6).
Кроме того, гибкая структура кадра, свойственная TDD, позволяет эффективно перераспределять временные ресурсы при асимметричных потоках информации в прямом и обратном каналах. Подобная асимметрия окажется весьма частым явлением
в системах третьего поколения в связи с возложением на мобильные терминалы функций связи с сетью Internet. В течение подобного контакта трафик на линии "вниз", как правило, гораздо насыщеннее, чем в обратном направлении. При этом можно поступить, как показано на рис. 5.7, представляющем схематично переход от симметричного (рис. 5.7, а) распределения временного ресурса между линиями "вниз" и "вверх" к асимметричному (рис. 5.7, б), на которых стрелка "вниз" отвечает приему информации МС, а "вверх" — передаче.
Как достоинство варианта TDD может рассматриваться и возможность более простой реализации однорежимного TDD абонентского терминала, что обусловлено отсутствием в нем дуплексора. Что же касается аппаратного усложнения двухрежимного (FDD/TDD) терминала, рассчитанного на оба варианта дуплексирования, то по сравнению с обычным FDD-терминалом оно не слишком значительно и не оказывает критического влияния на экономические показатели.
В свете сказанного вполне рациональными представляются рекомендации европейского проекта UMTS (см. гл. 12), касающиеся сочетания обоих рассмотренных режимов дуплексирования. Подобное решение придает системе гибкость в части использования выделенного спектрального диапазона и позволяет адаптировать пропускную способность к условиям эксплуатации и характеру услуг. Согласно европейской концепции построения системы третьего поколения, в двух выделенных WARC-92 участках спектра шириной в 230 МГц: 1885...2025 и 2110...2200 МГц,— полосы 1920...1980 и 2110...2170 предназначаются для ССМС с частотным дуплексом, а полосы 1900...1920 и 2010...2025 МГц- для ССМС с временным дуплексом [37].

6. КОМПЕНСАЦИЯ ЗАМИРАНИЙ И
ИСКАЖЕНИЙ СИГНАЛОВ НА ТРАССЕ РАСПРОСТРАНЕНИЯ
Особенности условий функционирования, характерные для мобильной радиосвязи, как отмечалось выше (см. гл. 3), приводят к появлению нескольких факторов, существенно усложняющих прием сигналов:
• затухание сигналов при распространении;
• замирания огибающей, вызванные многолучевостью распространения;
• искажение спектра и формы сигнала при селективных замираниях;
• межсимвольная интерференция.
Простейшим способом, позволяющим в какой-то степени скомпенсировать влияние указанных факторов, является введение запаса по мощности, гарантирующего поддержание требуемого превышения полезного сигнала над шумом на входе приемника с учетом затуханий и замираний на трассе распространения.
Понятно, что этот путь борьбы с канальными искажениями малоперспективен. Возможная глубина замирания сигнала, составляющая порядка 40 дБ, потребует введения эквивалентного запаса по мощности. При этом возникнут серьезные проблемы: быстрый разряд аккумуляторов МС, сильные соканальные помехи (или необходимость резкого увеличения размерности кластеров), усиление вредного воздействия электромагнитного излучения на организм человека. Таким образом, актуальны поиски альтернативных методов надежной передачи данных, не связанные с чрезмерным увеличением мощности излучения и снижением эффективности повторного использования каналов. Краткому их обсуждению посвящен дальнейший материал раздела.
6.1.
Управление мощностью в каналах
Обмен сигналами между БС и МС должен в идеале осуществляться на минимальном уровне мощности, обеспечивающем требуемое качество связи. При этом сводятся к минимуму помехи другим абонентам и базовым станциям, снижается энергопотребление (а значит, и требуемая частота поднаряда аккумуляторов) МС, уменьшается риск вредного экологического влияния радио- излучения.
Различие расстояний и условий распространения на трассах между БС и различными MC делает весьма желательной раздельную регулировку мощности сигналов, адресованных различным МС и передаваемых последними. Подобные процедуры управления мощностью (power соло) реализованы в цифровых системах второго поколения с временным разделением (GSM, D-AMPS) и, с наибольшей полнотой, в системах с кодовым разделением стандарта IS-95. Являются они и неотъемлемой компонентой стандартов третьего поколения (см. гл. 12).
В системе GSM подвижная станция измеряет и периодически передает на базовую станцию уровень сигнала БС "своей" ячейки и до 16 смежных ячеек, а также код качества принимаемых сигналов, зависящий от частоты битовых ошибок. По этой информации БС оценивает качество связи и передает на каждую мобильную станцию необходимые команды для изменения уровня излучаемой мощности. Управление мощностью происходит с периодом 4,6 мс и позволяет частично компенсировать быстрые замирания.
В системах стандарта D-AMPS измерение уровня сигнала и частоты битовых ошибок производится по команде с БС и используется для обеспечения процедуры передачи управления.
Наиболее тщательная регулировка мощности излучаемых сигналов необходима при кодовом разделении каналов, поскольку в соответствующих системах уровень взаимных помех непосредственно определяет абонентскую емкость (см. Я 5.3). Рассмотрим более подробно алгоритм регулировки мощности в сотовой системе подвижной радиосвязи стандарта IS-95.
Регулировка мощности излучения МС (обратный канал) начинается с момента
включения мобильного аппарата. Стандартом IS-95 определено, что МС сначала
проводит исследование доступа — ряд передач прогрессивно более высокой мощности
(см. 11.4.4). МС передает первое
сообщение с относительно низкой мощностью и затем ожидает ответ от БС. Если по
прошествии некотоporo времени МС не получает ответа от БС, то повторяет запрос
доступа с несколько большей мощностью. Процесс повторяется до тех пор, пока МС
не получит ответ от БС. Шаг увеличения мощности определяется параметром системы
PWR STEP.
Для дальнейшей регулировки мощности передачи МС использует уровень сигнала, полученного от БС (мощность пилот сигнала в канале синхронизации).
Рассмотрим закон, по которому должна производиться такая регулировка.
Пусть PТВ и PTM — мощность
сигналов, излучаемых БС и МС, PR и Р — мощность сигналов,
принимаемых БС и МС соответственно. Считая в первом приближении затухание
сигналов в прямом и обратном каналах одинаковым и
равным можно записать: Если учесть различие мощностей принимаемых сигналов,
то выражение (5.2) для отношения сигнал — шум, приходящееся на одну
информационную посылку в обратном канале, примет вид [6]:
мощность сигналов, принимаемых БС от (К-1) сторонних абонентов соты; Ц — мощность фонового шума; R,— скорость передачи информации, W, — ширина спектра сигнала. Учитывая, что отношение равно коэффициенту расширения спектра сигнала В, последнее выражение можно представить
Для
поддержания одинаковой достоверности приема данной БС сигналов всех
обслуживаемых МС регулировка мощности, излучаемой каждой из них, должна быть
направлена на выравнивание мощностей всех сигналов на входе приемника БС: Рв,
= Рв = С, где С — некоторая константа. При этом
выражение (6.3) совпадает с (5.2):
а закон регулировки мощности сигналов, передаваемых МС, на основании (6.1) дается равенством которое при постоянстве мощности сигналов, излучаемых БС, равносильно соотношению PR~P~M = const, или в децибелах (6.5)
Значение константы С, естественно (с точки зрения энергозатрат) поддерживать минимальным, обеспечивающим необходимое качество приема сигналов (т.е. заданное отношение сигнал — шум). Вместе с тем, как следует из (6.4), N/, должна быть малой по сравнению с суммарной мощностью внутрисистемной помехи, поскольку в противном случае имело бы место недоиспользование ресурса абонентской емкости системы: число абонентов можно было бы заметно увеличить за счет повышения мощности МС. Таким образом,
Выражая мощности в децибелах относительно милливатта, получим закон грубой регулировки мощности сигналов, излучаемых МС:
Учитывая, что расчет уровня удержания величины не может быть произведен достаточно точно, необходима дополнительная подстройка. Исходная мощность передачи МС в децибелах определяется выражением:
Два дополнительных параметра NOM PWR и INIT PWR используются оператором системы для более точной подстройки. Значения этих двух параметров регулирования, а также значение параметра PWR STEP передаются базовой станцией в составе сообщения доступа.
Процесс, описанный выше, получил название управление мощностью с открытой петлей (ореп4оор power control). Этот процесс регулирования осуществляется мобильной станцией и продолжается все время, пока идет обмен данными по каналу трафика. Процесс повторяется каждые 20 мс и используется для компенсации затухания и медленных замираний, практически одинаковых в прямом и обратном каналах. Необходимой точности регулирования данный алгоритм не обеспечивает, так как прямой и обратный каналы разнесены по частоте на 45 МГц, что превышает полосу когерентности канала.
Для более точной регулировки используется управление мощностью с замкнутой петлей (closed-loop power control). Базовая станция постоянно оценивает качество соединения в обратном канале на основе анализа вероятности битовых ошибок. Если эта вероятность превышает программно заданный порог, то базовая станция дает команду мобильной станции на увеличение мощности. Если качество связи слишком хорошее, то базовая станция дает команду уменьшить мощность. Управление производится с шагом +0,5 дБ каждые 1,25 мс.
Поскольку управление мощностью при замкнутой петле призвано компенсировать быстрые замирания, то отклик МС на эти команды должен следовать очень быстро. По этой причине команды управления мощностью посылаются непосредственно по каналу трафика. Для уменьшения времени реакции биты управления мощностью не защищены от ошибок.
Управление мощностью при замкнутой петле имеет внутреннюю (inner
lоор) и внешнюю (outer loop) петлю. Выше изложен алгоритм внутренней
петли управления мощностью. При реальной эксплуатации СОМА-системы требуется
иметь возможность динамически менять порог. Это и называется внешней петлей управления мощностью (иначе —
адаптивной регулировкой). Опираясь на измерение частоты ошибок в
приемниках БС, центр коммутации подвижной связи определяет оптимальные
пороговые отношения сигнал — шум для каждой из
обслуживаемых МС. Это позволяет снизить вероятность работы МС с избыточной
мощностью и тем самым повысить спектральную эффективность.
В принципе, стандарт IS-95 не включает описание этого процесса. Это позволяет каждому оператору вносить в алгоритм свои коррективы.
Во время перехода из одной соты в другую МС принимает команды управления мощностью сразу от нескольких БС, что может привести к конфликту. В такой ситуации МС действует следующим образом: мощность излучаемого сигнала уменьшается, если хотя бы одна БС дает такую команду. Увеличение мощности происходит, только если все БС дают команду на увеличение мощности.
Регулировка мощности с открытой петлей и с замкнутой петлей производятся параллельно. Общий диапазон регулировки мощности сигналов, излучаемых МС, составляет 85 дБ с шагом+0,5 дБ.
Регулировка мощности в прямом канале используется для уменьшения помех МС от БС соседних сот
Процесс регулировки мощности в прямом канале реализуется на основе измерений и команд МС, т.е. по схеме с обратной связью. Каждая МС непрерывно определяет частоту появления ошибок при приеме. БС постепенно снижает мощность излучения до тех пор, пока МС не зарегистрирует превышение порога частоты ошибок и не пошлет запрос на увеличение мощности. Шаг изменения мощности — 0,5 дБ в диапазоне +6 дБ, период регулировки — 20 мс.
Метод разнесенного приема (diversity reception) используется для выделения информации из нескольких сигналов, передаваемых по независимо замирающим путям, называемым ветвями разнесения. Идея метода состоит в том, что сигналы, отличающиеся (разнесенные) по какому-либо параметру, подвержены замираниям, корреляция между которыми тем меньше, чем существеннее разнесение. Другими словами, неблагоприятная (сопровождающаяся подавлением суммарного сигнала) многолучевая интерференционная картина в одной из ветвей разнесения вовсе не означает, что условия приема в других ветвях столь же плохи. Вследствие этого комбинирование параллельных сигналов, по- ступающих по разным ветвям разнесения, позволит смягчить вредный эффект глубоких замираний.
Как видно, процедура разнесенного приема включает в себя решение двух отдельных задач:
• организация ветвей разнесения и разделение принимаемых сигналов, разнесенных по какому-либо параметру;
• комбинирование разделенных сигналов с целью формирования результирующего сигнала с более высоким качеством (с меньшей глубиной замираний, с большей мощностью или большим отношением сигнал — шум).
6.2.1. Классические методы разнесения
Можно
выделить два обобщенных класса методов разнесения: макроразнесение и
макроразнесение .
При макроразнесение параллельные пути с независимыми медленными замираниями формируются с помощью двух или более антенн, расположенных на различных БС.
Макроразнесение предназначено для комбинирования сигналов, принимаемых на одной и той же станции (базовой или мобильной), и служит для ослабления влияния быстрых замираний.
Принципиально возможны несколько методов разнесения. Разнесение по компонентам электромагнитного поля (electromagnetic diversity). При вертикальной поляризации излучаемых радиоволн, характерной для СМР, напряженность электрического поля и ортогональные (параллельная и перпендикулярная направлению движения МС) составляющие магнитного поля могут рассматриваться как независимые [21, 22]. Специальные "энергетически — плотностные" антенны способны принимать эти компоненты независимо [22]. Практического применения в настоящее время не находит.
Поляризационное разнесение (polarizat~on diversity). Прием сигналов на две антенны (например, штыревая и петлевая) позволяет разделить вертикально и горизонтально поляризованные сигналы. Метод не находит практического применения, в диапазоне СВЧ замирания сигналов с различной поляризацией оказываются сильно коррелированными [13].
Угловое разнесение (angle diversity). Сигналы с разными углами прихода могут быть разделены антеннами с частично перекрывающимися диаграммами направленности. При этом корреляция сигналов на выходах разных антенн тем слабее, чем меньше перекрытие этих диаграмм. Необходимо при этом учитывать, что мощность сигналов, принимаемых различными антеннами, будет существенно различной.
Частотное разнесение (frequency diversity). Коэффициент корреляции двух сигналов, разнесенных по частоте, определяется их взаимной частотной расстройкой (см. выражение 3.20). При достаточном разнесении (большем полосы частотной когерентности) сигналы на разных частотах, а значит, и замирания этих сигналов, будут слабо коррелированными.
Одновременное излучение сигналов в двух и более частотных диапазонах в современных CMP не используется. Примером использования разнесения по частоте являются медленные (с частотой кадров 217 Гц) скачки по частоте, реализованные в ССМС стандарта GSM. При изменении частоты, превышающем полосу когерентности, сигналы в соседних кадрах окажутся некоррелированными, что устраняет пакетные ошибки при глубоких замираниях.
Пространственное разнесение (space diversity). Может быть реализовано на подвижной станции за счет приема сигналов в различные моменты времени. Коэффициент корреляции принимаемых сигналов определяется перемещением МС (см. (3.21)). Как указывалось в разделе 3, разноса порядка A/2 достаточно, чтобы сигналы можно было считать некоррелированными.
На БС пространственное разнесение реализуется при приеме сигналов двумя или более антеннами. При этом коэффициент корреляции, кроме величины разноса антенн, определяется и высотой их установки [22].
Другим способом пространственного разнесения является излучение сигналов одной БС через разные антенны (antenna diversity), предусмотренное спецификациями систем третьего поколения 3GPP (см. гл. 12).
Временное разнесение (time diversity) может быть реализовано при передаче сигнала на нескольких временных отрезках, причем разнос между соседними отрезками должен быть не менее времени когерентности канала связи. Широко применяемым в цифровых CMP практическим вариантом временного разнесения является перемежение, рассматриваемое ниже. Возможность реализации другой разновидности временного разнесения связана с природой многолучевого распространения, когда суперпозиция принимаемых сигналов содержит компоненты, являющиеся, в свою очередь, продуктом многолучевое интерференции, причем корреляция замираний этих компонент достаточно слаба. В широкополосных (spread spectrum) система с должным расширением спектра возможен раздельный пире упомянутых составляющих, так что их комбинирование существенно снижает влияние замираний. Подобный вид разнесения рассматриваемый ниже в ~ 6.2.2, нередко выделяется в самостоятельный под названием "многолучевое разнесенное" [38 — 41].
Кодированное с ослравленоем ошибок, составляющее пред мет следующей главы, иногда также трактуется как один из вари антов временного разнесения в цифровых системах передачи [19]
Следует отметить, что для большинства рассмотрены методов разнесения в принципе не существует ограничения к количество ветвей разнесения.
Рассмотрим возможные методы комбинирования сигнала при разнесенном приеме.
При макроразнесение основным (практически единственны используемым) методом комбинирования является селективно комбонорованое (автовыбор). При этом методе из двух или боле принятых сигналов выбирается наибольший. Возможная структура реализующая данный метод, приведена на рис. 6.1.
Если
подобный приемник, содержащий число параллельных каналов, равное числу ветвей
разнесения, представляется слишком затратным в аппаратном отношении, вместо него
можно использовать приемник с переключением или
сканирование

[19], показанный на рис. 6.2. Разумеется, его аппаратное упрощение сопровождается определенными энергетическими потерями по отношению к предыдущему, связанными с необходимостью периодически повторять процесс сканирования.
Примером использования автовыбор при макроразнесение является комбинирование сигналов, принимаемых на МС от двух или более БС, разнесенных в пространстве.
Метод реализован, например, в ССМС стандарта IS-95. В соответствии с данным стандартом сигналы в прямом канале излучаются когерентно несколькими БС. На рис. 6.3 показаны две такие станции и примерные зависимости уровней сигналов rД(k) и r,(k), принимаемых МС от этих БС в течение последовательных отрезков времени — кадров (по оси абсцисс отложены номера кадров). В приемнике МС эти сигналы разделяются за счет их различной кодовой окраски. В транскодере, входящем в состав приемника МС, в каждом кадре из принятых сигналов выбирается наибольший: ,(k) = max(r,(k), r,(k)), что обеспечивает более высокое качество результирующего сигнала по сравнению с каждым из принятых сигналов БС.
При микроразнесении, используемом при быстрых замираниях, очень важно, чтобы комбинируемые при разнесении сигналы имели равные средние мощности. Остановимся на следующих возможных методах комбинирования, характерных для ССМС:
• селективное комбинирование (автовыбор);
• оптимальное когерентное сложение, максимизирующей отношение сигнал — шум;
• равновесное когерентное сложение.


Принципиально метод селективного комбинирования наиболее прост и аналогичен автовыбор при макроскопическом разнесении. Однако практическая реализация автовыбор при микроскопическом разнесении наталкивается на трудности, связанные с необходимостью установки плавающего порога. Реальная альтернатива — комбинирование с коммутацией ветвей разнесения. При этом методе переключение ветвей производится в тот момент, когда ранее выбранный сигнал окажется ниже заранее установленного порога.
Когерентное сложение, максимизирующей отношение сигнал — шум, заключается в весовом суммировании предварительно фазированных сигналов:

Возможная структура, реализующая метод, приведена на рис. 6.4. Можно показать [21, 22], что оптимальный весовой коэффициент для каждой ветви разнесения равен
С, =r, IN,, где Ц —
мощность шума в j-A ветви разнесения. Подобный алгоритм приема осуществляет
многоканальную согласованную фильтрацию сигналов, пришедших по параллельным
ветвям разнесения, и потому максимизирует результирующее отношение сигнал — шум.
Поскольку, однако, текущее отношение сигнал — шум в ветвях разнесения постоянно
флюктуирует в силу замираний, его приходится непрерывно отслеживать, что
существенно усложняет аппаратную реализацию приемника.
Шагом в направлении упрощения приемника является переход к когерентному равновесному сложению (рис. 6.5), не требующему введения следящих петель для измерения текущего отношения сигнал — шум в каждой ветви.
Для оценки эффективности рассматриваемых алгоритмов комбинирования сопоставим их по значению результирующего отношения сигнал — шум.
Отношение сигнал — шум в каждой ветви пропорционально квадрату огибающей сигнала и поэтому для случая рэлеевских замираний имеет экспоненциальную плотность вероятности

Если сигналы различных ветвей разнесения являются статистически
независимыми и их огибающие имеют рэлеевское распределение с одинаковой средней
мощностью, то закон распределения мгновенного результирующего отношения сигнал-
шум на выходе схемы комбинирования может быть записан.
Для адекватного сравнения характеристик различных схем комбинирования следовало бы рассчитать вероятности ошибок на бит (символ) для каждой из них. Технически это может быть сделано усреднением вероятностей ошибок для нефлюктуирующего сигнала с использованием статистик отношения сигнал — шум типа (6.13). Результаты такого анализа приводятся во многих источниках [21, 32, 38]. В качестве грубого приближения ограничимся сравнением средних значений результирующего отношения сигнал-шум:
Как естественно ожидать, суммирование с равными весами несколько хуже оптимального, максимизирующего отношение сигнал-шум, но лучше селективного комбинирования. Так, при М = 10 выигрыш в отношении сигнал — шум при оптимальном когерентным суммировании составит 10 дБ. Переход к равновесной схеме снизит его до 9,1 дБ, тогда как автовыбор обеспечит лишь выигрыш в 4,7 дБ. Подчеркнем еще раз весьма ориентировочный характер этих цифр, отсылая за более корректным сопоставлением к упомянутой выше литературе.
Разнесенный прием позволяет существенно улучшить помехоустойчивость систем подвижной радиосвязи. Достигаемый выигрыш можно оценить допустимым снижением отношения сигнал-шум в ветвях разнесения при сохранении результирующей частоты битовых ошибок. Так, опираясь на данные из [19], при допустимой частоте битовых ошибок 10 ' наличие двух ветвей разнесения (с оптимальным сложением) позволяет снизить требуемую мощность сигнала на 15 дБ. При уменьшении допустимой вероятности ошибки на бит энергетический выигрыш за счет разнесения становится еще заметнее.
6.2.2. Многолучевое разнесение
Как уже отмечалось выше, при многолучевом распространении сигналы, приходящие различными путями, слабо коррелированны. Влияние замираний будет существенно снижено, если скомбинировать такие сигналы. Однако для этого необходимо разделить сигналы, приходящие по различным лучам.
Подобная задача, не выполнимая в узкополосных системах, весьма изящно решается при использовании широкополосных сигналов, имеющих полосу Wc, многократно превосходящую полосу когерентности канала Вс.
Надлежащим выбором закона модуляции сигнала с полосой И/с можно добиться разрешения принимаемых многолучевых компонент, имеющих разность времен прихода, превышающую 1/W< [20]. Это означает, что при максимальном времени рассеяния (интервале времени между приходом первого и последнего лучей) Т может существовать до М = И/сТ разделимых сигнала. Величина Т может быть приближенно выражена через полосу когерентности канала связи: Т,„=1/Вс. Таким образом, при использовании широкополосного (Wc» Bc) сигнала на приемной стороне может быть получено вплоть дс M = И/~/Вс разделимых сигнальных компонент, подобно тому как это имеет место при традиционном частотном разнесении [38].
Многолучевое разнесение предполагает решение тех же двух задач, что и при классических методах разнесения: разделение сигналов (в данном случае по времени прихода) и их комбинирование.
Для того чтобы сдвинутые по времени многолучевые компоненты сигнала наблюдались раздельно на выходе линейного фильтра приемника, необходимо, чтобы отклик фильтра на каждую из названных компонент был кратковременным по сравнению с их взаимным временным сдвигом. В качестве фильтра естественно принять согласованный, наилучшим образом очищающий сигнал от шума. Отклик последнего на сигнал, с которым он согласован, есть, как известно, автокорреляционная функция сигнала [20]. Таким образом, для разделения многолучевых компонент пригодны сигналы с "острой" автокорреляционной функцией. Для ССМС, как и для ряда других систем, нежелательно применение коротких импульсных сигналов, поскольку "вложить" требуемую энергию в короткий импульс можно только за счет повышенной пиковой мощности, что плохо сочетается со стремлением иметь портативные и энергосберегающие МС, дружественные в экологическом отношении. Тем самым становится очевидным, почему для многолучевого разнесения требуются именно широкополосные (сложные — spread spectrum) сигналы: сам сигнал имеет достаточно большую длительность, но согласованный фильтр укорачивает (сжимает) его. Хрестоматийным является факт, что совмещение этих требований возможно только для сигналов, имеющих большое значение произведения полосы на длительность (т.е. коэффициент расширения спектра
Обратимся к рис. 6.6. Сигнал, искаженный многолучевым

каналом (на рис 6.6, а показаны три сигнала, пришедшие по различным лучам), подается на согласованный фильтр, и, если сигнал синтезирован грамотно, на выходе фильтра наблюдаются разрешенные компоненты в виде острых неперекрывающихся пиков (рис. 6.6, б). Последняя эпюра напоминает садовые грабли (по-английски rake), что и определило наименование устройства, осуществляющего многолучевое разнесение, — "RAKE-приемник".
RAKE-приемник был
разработан Прайсом и Грином еще в
На
рис. 6.7 приведена структура М- канального RAKE-
приемника. Принимаемое колебание r(t) поступает на М параллельных
корреляторов, на вторые входы которых подаются местные опоры представляющие
собой

копии переданного сигнала с временными сдвигами равными предсказанным задержкам многолучевых компонент. На выходе каждого коррелятора формируется отсчет отклика на соответствующую компоненту входного сигнала (при безошибочном предсказании задержки точно совпадающий с реакцией согласованного фильтра в нужный момент). Далее полученные отсчеты поступают на устройство комбинирования, действующее в соответствии с одной из ранее рассмотренных процедур.
Комбинирование сигналов на основе RAKE-приемника реализовано в ССМС стандарта IS-95 (см. также гл. 11). Приемные устройства МС и БС включают несколько (3 на МС и 4 на БС) параллельно работающих корреляторов, которые выделяют наиболее сильные сигналы. Выходы корреляторов сводятся к одному и тому же моменту времени и суммируются. Тем самым эффект многолучевого распространения используется для повышения качества связи.
Как можно понять, эффективность RAKE-приемника находится в прямой зависимости от точности знания характеристик канала.
В настоящее время разработаны и применяются многочисленные модификации RAKE-алгоритмов [38, 42]. Наиболее "про- двинутыми" (и, соответственно, сложными) являются адаптивные RAKE-приемники, в которых характеристики канала рекуррентно оцениваются в процессе работы.
Подчеркнем еще раз необходимость тщательного выбора закона модуляции сигнала для систем, в которых предполагается использование алгоритма RAKE. При этом следует иметь в виду, что требование широкополосности (большого отношения ширины спектра сигнала к полосе когерентности) является необходимым, но не достаточным. Среди множества широкополосных сигналов подходящими для обсуждаемых применений являются лишь те, которые обладают "хорошими" автокорреляционными свойствами. Последнее требование подразумевает острый пик и малый уровень боковых пиков реакции на сигнал согласованного фильтра. Синтез сигналов такого рода является весьма нетривиальной задачей, постоянно привлекающей к себе внимание исследователей [20, 34, 35].
Выше, применительно к различным аспектам функционирования систем мобильной связи, уже отмечались существенные преимущества широкополосной передачи в сочетании с кодовым разделением сигналов абонентов. Одним из многих аргументов
в пользу широкополосной идеологии является и сопутствующая только ей возможность реализации многолучевого разнесения.
6.3.
Подавление межсимвольной интерференции
В узкополосных (т.е. не использующих сложные сигналы) системах многолучевые компоненты, имеющие различную временную задержку, не могут быть разделены (по крайней мере, без серьезных энергетических потерь) с помощью алгоритмов типа RAKE. В результате наложения запаздывающей копии сигнала, модулированного цифровым потоком данных, на опережающую текущая посылка последней искажается предыдущей посылкой запаздывающей копии. Возникающая таким образом специфическая помеха называется межсимвольной интерференцией (МСИ).
При максимальном времени рассеяния возможно наложение друг на друга вплоть до
посылок. К примеру, для
стандарта GSM-900 Ть = 3,7 мкс, а максимальное время рассеяния обычно
принимается равным Т= 16 мкс. При этом в приемнике
возможно наложение до М = 6 переданных посылок.
Очевидно, что МСИ существенно затрудняет декодирование принимаемых сигналов и приводит к увеличению частоты битовых ошибок.
К настоящему времени разработан ряд методов борьбы с МСИ. Коротко рассмотрим основные из них.
В цифровых системах мобильной связи передача информации производится поэлементно с некоторым фиксированным интервалом между последовательными посылками.
В простейшем случае текущая наблюдаемая приемником посылка зависит только от текущей переданной. При этом оптимальным (в смысле минимизации средней вероятности ошибочного декодирования сообщения) является посимвольный прием, в процессе которого решение о значении каждой переданной посылки принимается отдельно, независимо от предыдущих и последующих посылок.
При наличии МСИ, однако, ситуация не столь проста, поскольку каждое наблюдение определяется наряду с текущей также и предыдущими посылками. Тем самым в наблюдаемом сигнале проявляется зависимость от прошлого, т.е. память, подобная, к примеру, той, что вводится в сигнал искусственно при использовании любых разновидностей частотной манипуляции с непрерывной фазой (см. гл. 4), а также сверхточного кодирования, рассматриваемого в следующей главе.
Посимвольный прием при этом не является оптимальным и уступает так называемому "приему в целом", при котором решение о принятом сообщении выносится по результатам совместной обработки многих последовательных посылок. Поскольку сложность соответствующего приемника экспоненциально растет с памятью, его практическая реализация может оказаться проблемной. Алгоритм Витерби, первоначальным назначением которого было декодирование сверхточных кодов, во многих случаях заметно упрощает процедуру "приема в целом" и потому часто применяется для борьбы с межсимвольной интерференцией.
Пусть
наблюдаемый i-й момент времени отсчет полезного сигнала, искаженного МСИ; и;
— шумовой отсчет, являющийся гауссовский случайной величиной с нулевым
средним.
Как отмечалось выше, МСИ возникает в многолучевом канале за счет наложения копий сигнала, сдвинутых друг относительно друга во времени из-за различия протяженности трасс распространения сигналов по отдельным лучам.
Пусть МСИ создается М дополнительными лучами. Тогда i-й сигнальный отсчет окажется линейной комбинацией но (а;) и М предыдущих информационных символов:
Другими словами, информационный сигнал на i-м шаге является результатом линейного кодирования вектора состояния, однозначно определяемого последовательностью переданных информационных символов.
Следовательно, при конечном числе интерферирующих лучей (что имеет место в любой практической системе) МСИ можно рассматривать как выход устройства с конечным числом состояний [38]. Это позволяет выход канала с МСИ представить в виде кодовой решетки.
Такая кодовая решетка в бинарном случае содержит 2 узлов (состояний). Из каждого узла выходят 2 ребра в соседние состояния, соответствующие различным значениям информационного символа а. При этом каждое ребро может быть маркировано своим значением отсчета s; показывающим (в соответствии с (6.17)), как состояние вместе с текущим переданным символом а; отражается в закодированном (через МСИ) сигнале. Получаемая кодовая решетка аналогична решетке сверточного кода, рассматриваемого в следующей главе. Отличие состоит в том, что значения отсчетов s; маркирующие ребра, являются действительными числами (а не двоичными словами).
Демодулятор должен оценить переданные символы а;, т.е. состояния.
В общем случае необходимо было бы вычислять расстояния для всех возможных последовательностей (2 в бинарною случае). Однако наличие памяти в сигнале (зависимость отсчета s; от состояния демодулятора А; вводимая за счет МСИ) позволяет, используя алгоритм Витерби, уменьшить число анализируемых последовательностей.
Алгоритм Витерби является рекуррентным алгоритмом последовательного поиска пути на решетке, обеспечивающим максимально правдоподобное декодирование сигнала.
Демодулятор Витерби на каждом шаге (при приеме очередного сигнального интервала) сравнивает наблюдаемые отсчеты у, с маркировкой входящих ребер s, для каждого узла, оставляя из двух путей один ("выживший"), имеющий наименьшую метрику
(евклидово расстояние). После этой процедуры на новом шаге родовая решетка содержит также 2 узлов.
По прошествии времени в несколько длительностей памяти" с вероятностью, очень близкой к единице, оказывается, что все выжившие пути исходят из одного узла [38]. Тогда состояние демодулятора, соответствующее этому узлу, может быть выдано к решение (оценка информационных символов). Таким образом, с некоторой задержкой выдается оценка "старых символов".
Далее процесс продолжается по той же схеме. С приемом нового отсчета картинка сдвигается на один шаг (декодированный символ исключается из анализа и добавляется вновь принятый). При этом в дальнейшем анализе используются только выжившие пути, запомненные ранее.
Вычислительная сложность алгоритма Витерби экспоненциально возрастает с величиной временного рассеяния в канале. Для каждого нового принимаемого символа в бинарном случае необходимо вычислять 2М" метрик. Для каналов с большим временем рассеяния это может стать серьезным препятствием при практической реализации алгоритма.
Более подробно алгоритм Витерби рассмотрен, например, в [38], а также в следующей главе применительно к декодированию сверхточных кодов.
6.3.2. Формирование спектра излучаемых сигналов
При заданной скорости передачи данных (длительности передачи символа) влияние МСИ зависит от частотной характеристики канала, определяющей значение времени рассеяния, и спектра излучаемого сигнала, определяющего длительность отклика в приемнике.
В цифровой системе связи спектральную плотность мощности излучаемого сигнала можно формировать путем выбора формы импульса (огибающей посылки, см. гл. 4), а также введением корреляции (памяти) посредством кодирования.
Кодирование для
формирования спектра сигнала выполняется после канального кодирования.
Используемые для этой цели воды обычно называют в литературе модуляционными
кодами или кодами перевода данных [38]. Такие коды вводят
определенные ограничения на последовательность передаваемых символов, подаваемых
на модулятор. Тем самым в сигнал вводится память, которая может быть далее
использована при демодуляции (в частности, с помощью алгоритма Витерби).
Более подробно проблема формирования спектра сигнала рассмотрена, например, в [38].
В узкополосных цифровых системах (в частности, в СОМС стандартов GSM и D AMPS) для компенсации межсимвольных искажений, возникающих за счет многолучевого распространения, может быть использован Эквалайзинг (equalizilng — буквально выравнивание). Метод предназначен для компенсации разности хода между составляющими при многолучевом распространении, которая приводит к МСИ. По существу эквалайзер представляет собой адаптивный фильтр, настраиваемый таким образом, чтобы сигнал на его выходе был в возможно большей степени очищен от межсимвольных искажений, содержащихся во входном сигнале.
Эквалайзеры, используемые, например, в СОМС стандарта GSM, обеспечивают выравнивание по времени импульсных сигналов при рассогласовании до 16 мкс [25].
Принцип выравнивания хорошо иллюстрирует схема простейшего линейного эквалайзера с трехэлементной линией задержки, рассмотренная в [13] (рис. 6.8).
Алгоритм работы приведенного устройства достаточно прост. Если на входе фильтра присутствует основной сигнал

и его копия, сдвинутая на время г, равное времени задержки сигнала в фильтре, и уменьшенная по амплитуде, то подбором коэффициентов можно добиться, чтобы на выходе фильтра полностью сохранился основной сигнал, а вторая составляющая, представляющая собой помеху, была уменьшена.
Ясно, что такой эквалайзер будет выполнять свое назначение лишь в том случае, когда, кроме основного сигнала, имеется только один дополнительный и его задержка относительно основного сигнала равна времени задержки сигнала в фильтре.
В реальных условиях на вход приемного устройства может поступать большое число сигналов (радиоволн), задержка между которыми неизвестна.
Линейным эквалайзером, наиболее часто используемым на практике, является линейный трансверсальный фильтр (рис. 6.9) [38]. На его вход поступает принятая сигнальная последовательность ( а выходом являются оценки информационной последовательности (а). Оценка символа может быть выражена в виде
Общее количество ячеек фильтра равно 2М+1, где М, как и ранее, означает число дополнительных лучей, создающих МСИ. Это обуславливает линейную зависимость вычислительной сложности эквалайзера от величины временного рассеяния в канале.
В качестве критерия оптимизации наиболее часто используется критерий минимума среднего квадрата ошибки
В рассмотренной структуре линейного
эквалайзера задержка сигнала между ячейками равна длительности символов. Такое
построение является оптимальным, если перед эквалайзером имеется фильтр,
согласованный с переданным сигналом, искаженным в канале [38]. Если
характеристики канала неизвестны, то приемник обычно согласуется с переданным
сигнальным импульсом. При этом эффективность выравнивания существенно
снижается.

В дробных эквалайзерах используется дискретизация приходящего сигнала с частотой, не меньшей удвоенной ширины спектра сигнала (т.е. задержка между ячейками не превышает времени дискретизации по Котельникову).
Линейные эквалайзеры относительно просты по устройству, однако при больших искажениях сигналов, что характерно для систем мобильной радиосвязи, их эффективность оказывается невысокой [13, 38].
Примером нелинейного эквалайзера является эквалайзер с обратной связью по решению (рис. 6.10). Он состоит из двух фильтров — фильтра прямой и фильтра обратной связи по решению (OCP). Прямой фильтр идентичен линейному трансверсальному фильтру, рассмотренному выше (рис. 6.9). Фильтр обратной связи имеет на своем входе последовательность решений по предшествующим про детектированным символам (что и обусловливает нелинейность эквалайзера) и используется для устранения в предстоящей оценке части МСИ, вызванной предыдущими символами [38].
Все рассмотренные выше эквалайзеры ориентированы на ситуацию, когда характеристики канала (импульсная, частотная) в достаточной мере известны приемной стороне. Однако для СОМС такая ситуация не характерна. В большинстве случаев характеристики канала априори не известны и, кроме того, не постоянны.

Поэтому эквалайзер должен включать петлю адаптации, чтобы изменения характеристик канала могли быть учтены в процессе работы.
На рис. 6.11 представлена схема линейного адаптивного эквалайзера, основанного на критерии минимума среднеквадратической ошибки. Алгоритм подстройки весовых коэффициентов подобного эквалайзера [38):
 .
.
Для первоначального оценивания весовых коэффициентов эквалайзера желательно иметь информацию о переданной информационной последовательности. Во всех цифровых ССМС это обеспечивается включением "обучающей последовательности" в состав каждого кадра передачи речевого сигнала.
Принципиально возможно построение адаптивного эквалайзера, не использующего для первоначальной настройки обучающую последовательность (" слепое выравнивание").
Следует отметить, что рассмотренные примеры далеко не исчерпывают все возможные варианты построения эквалайзеров.
Более подробно информацию о структурах эквалайзеров, алгоритмах оценивания весовых коэффициентов и эффективности выравнивания можно почерпнуть из [38].
В заключение можно отметить, что эквалайзер не всегда рассматривается как функционально необходимое звено приемника и спецификации, как правило, отдают производителю решение вопроса о его наличии или отсутствии.
7. ПОМЕХОУСТОЙЧИВОЕ КОДИРОВАНИЕ
В СИСТЕМАХ МОБИЛЬНОЙ РАДИОСВЯЗИ
Особенностью радиолиний по сравнению с кабельными является повышенный уровень помех и искажений передаваемого сигнала (см. гл. 3). При цифровой передаче данных результатом этого являются ошибочные решения приемной стороны относительно значения переданного символа. Для обнаружения и исправления возникающих ошибок применяется помехоустойчивое кодирование, суть которого сводится к введению избыточности в передаваемое сообщение. В двоичном случае каждому сообщению из k информационных бит сопоставляется кодовое слово длиной n > k бит (символов) согласно некоторому правилу кодирования.
Возможны случаи, когда биты передаваемого сообщения неравноценны по степени влияния их искажений на восстанавливаемое сообщение. При этом разумно раздельно закодировать группы информационных битов, отводя большую избыточность группам с большей ответственностью. Так, для речевого кодека (см. гл. 9) выделяются и защищаются кодом старшие разряды коэффициентов а; периодов основного тона, коэффициентов усиления (всего 30 из 137 бит). Для защиты остальных бит вводится значительно меньшее число избыточных символов.
Помехоустойчивое кодирование иначе называется канальным кодированием, поскольку предназначается для нейтрализации канальных помех. В системах мобильной связи канальное кодирование выполняется в несколько этапов, как показано на рис. 7.1. В зависимости от важности логических каналов для них

предусматриваются разные наборы указанных процедур, разные типы кодов и их параметры. Обычно полный набор процедур содержат каналы трафика и синхронизации.
В блоковых (блочных) кодах k символам источника сопоставляется кодовое слово из и символов. В сверхточных кодируемая последовательность не разбивается на блоки. Кроме того, выделяют систематические (разделимые) коды, в словах которых можно указать позиции с символами сообщения, и несистематические, кодовые слова которых не обладают этим свойством. Напомним кратко некоторые положения теории помехоустойчивого кодирования, отсылая читателя за подробностями к популярным монографиям [43-46].
Бинарные блоковые коды чаще всего рассматриваются в предположении, что источник безызбыточный, формирующий k-битовые блоки А=(а1, а2, ..., аn) двоичных символов аi =0,1
с равной вероятностью 1/М, где М = 2", а для передачи используется двоичный симметричный канал (ДСК) без памяти, наблюдением на выходе которого является вектор Y=(y1, у2, ..., уn)=С+Е, где С=(c1,с2, ..., c n)- кодовый вектор (кодовое слово), а Е =(е,, е,, ..., е„) — вектор ошибок с независимыми компонентами. При этом элементы уi , si еi, упомянутых векторов принимают двоичные значения 0 и 1, а символ "+" всюду в этом разделе обозначает поэлементное суммирование по модулю два. В ДСК вероятность появления конкретного вектора ошибки Е убывает при увеличении кратности ошибки t(т.е. числа 1 в векторе Е, или, что равносильно, числа искаженных символов в переданном кодовом векторе). Поэтому оптимальной (максимально правдоподобной) стратегией декодирования оказывается правило минимального расстояния Хэмминга, согласно которому принятый вектор У должен декодироваться в ближайший к нему, по Хэммингу, кодовый вектор С. Напомним, что в двоичном случае расстояние Хэмминга между Y и С есть просто число единиц среди элементов вектора Y+ С.
Под термином код понимается множество из М кодовых слов. Отметим, что для произвольного кода с большим числом слов реализация оптимального правила декодирования может обмазаться чрезвычайно затратной в аппаратно-программном отношении. Из-за существования довольно простых алгоритмов декодирования наибольшее применение находят линейные коды, являющиеся линейными подпространствами. В системах мобильной связи, в частности, нашли применение линейные коды Хэмминга, БЧХ, Голея, Рида-Маллера, Рида — Соломона (РС).
Параметры линейного кода п (длина или размерность пространства, в котором задан код) и k (число информационных бит или размерность кода) — определяют его избыточность и — k (число проверочных символов), скорость (7.1) и входят в его традиционное обозначение (n, k). В слове систематического кода длины и, как правило, первые k символов являются информационными, в то время как оставшиеся и — k позиций принадлежат избыточным символам, создаваемым кодером. Корректирующая способность оценивается с помощью кодового расстояния d,— минимального расстояния Хэмминга между всевозможными парами кодовых слов. Чем больше d,, тем выше помехо- устойчивость кода, а именно максимальное число (кратность) символьных ошибок, гарантированно обнаруживаемых кодом iД = d, -1. Если же код используется для исправления ошибок, то это с гарантией выполнимо, если их кратность не превосходит 1р = ((d, — 1)/2), где () — целая часть числа. Для задания кода и, следовательно, для вычисления контрольных символов по известным информационным можно использовать один из возможных способов задания подпространства размерности k в пространстве размерности и. Напомним, что задание пространства предполагает и задание поля, откуда берутся коэффициенты разложения вектора по базису (координаты вектора). Вышеперечисленные коды, кроме кода Рида — Соломона, заданы над двоичным полем, а последний — над расширением двоичного, имеющим 2 элементов, где т — натуральное число.
Каждый проверочный бит Ь, есть линейная комбинация не- которых вполне определенных информационных, например, Ь; = а„+а, + а,. Благодаря свойствам сложения по модулю 2 последовательность а„, а,, а, Ь; содержит четное число символов 1. Поэтому проверочные символы часто называют битами контроля четности или просто битами четности.
Классические способы задания линейного кода связаны с порождающей матрицей G, строками которой являются k линейно независимых кодовых слов (базис кода) С i 1,2,<, и проверочной матрицей, Н, обладающей свойством
Пример 7.1. Порождающая матрица кода Рида-Маллера (8,4) первого порядка имеет вид

Отметим связь кодов Рида
— Малера с широко распространенными в цифровой связи функциями Уолша. При замене
двоичных символов 0 и 1 на +1 и — 1 соответственно операция сложения по модулю 2
перейдет в умножение действительных чисел +1 и — 1. При таком отображении
базисные векторы кода дадут функции Радемахера (меандры, период каждого из
которых равен половине периода предыдущего), а остальные кодовые слова— прямые и противоположные функции Уолша, равные различным
произведениям функций Радемахера (так называемые биортогональные сигналы).
Функции Уолша (ортогональные коды) применяются в системе стандарта IS-95, а
также в системах третьего поколения (см. гл. 11, 12).
Проиллюстрируем теперь роль проверочной матрицы в построении линейного кода.
Промер 7.2. Пусть проверочная матрица кода Хэмминга (7,4) с расстоянием d = 3, столбцами которой являются все 7 ненулевых 3-разрядных двоичных векторов, имеет вид

Если кодовое слово С = (а1, а2, а3, а4, b1, b2,b3) подставить в (7.2) и выполнить матричное умножение, то получим соотношения для вычисления контрольных бит по информационным:
В системах связи весьма распространены циклические коды, составляющие подкласс линейных, для которых разработаны эффективные процедуры декодирования. Они задаются с помощью порождающего многочлена д(х) степени и — k. При этом каждому кодовому слову формально сопоставляется многочлен с коэффициентами, равными элементам кодового вектора. Так, кодовому слову С = (д., с, ..., с„) соответствует многочлен
делящийся без остатка на порождающий произвольный многочлен. Порождающие многочлены хороших циклических кодов, в том числе БЧХ и РС (являющихся подклассом недвоичных кодов БЧХ), табулированы в литературе [43].
Когда в подобных таблицах не находится кода с подходящими значениями параметров и, k, можно поискать его среди укороченных циклических кодов. Для этого из слов циклического кода с k' > k информационными символами отбираются только те, у которых первые k' — k символов нулевые. Эти первые символы затем отбрасываются (не передаются по каналу), поскольку декодер знает, что они нулевые. Полученный (и — k'+k, k) линейный код, не являясь, строго говоря, циклическим, тем не менее, может быть декодирован теми же способами, что и исходный. Минимальное расстояние укороченного циклического кода, разумеется, не меньше расстояния исходного кода, чем и объясняется широкое использование приема укорочения на практике.
Обсудим кратко процедуры декодирования линейных и циклических кодов.
Для обнаружения ошибок декодер проверяет принадлежность принятой последовательности Y данному коду (подпространству): если Y является кодовым словом, то принимается решение об отсутствии ошибок, в противном случае фиксируется наличие ошибки. Для этого вычисляется синдром
S=
YHt
=(С+Е)Нt =ЕНt,
который с учетом (7.2) не зависит от кодового
слова и определяется только вектором ошибки Е.
Если S = О, то Y является одним из М кодовых слов и, следовательно, максимально правдоподобная оценка вектора ошибки Е = О. Решение об отсутствии ошибок будет правильным, если в действительности Е =0. Но согласно (7.2) синдром S =0 и в случаях, когда Е совпадает с любым ненулевым кодовым словом. Такие ошибки не будут обнаружены. Их общее количество составляет 2" — 1. Для кода примера 7.2, в частности, трехкратные ошибки Е =1110000 и E =0011010 дают нулевой синдром и не обнаруживаются.
Если
S , —О, то принимается всегда правильное решение Е=О.
Для обнаружения ошибок рекомендуется использовать протокол контроля циклическим избыточным кодом — ЦИК (в зарубежных источниках CRC — cyclic redundancy code). Для информационной последовательности А произвольной длины k по (7.3) вычисляется остаток b(х), который передается вместе с А. На приемной стороне по А' снова вычисляется остаток b(x), который сравнивается с принятым b'(x), т.е. фактически определяется синдром. При их равенстве выносится решение об отсутствии ошибок, в противном случае — о наличии. Доля пропущенных ошибок — (2" — 1)/(2"' -1) =1/2 — зависит только от степени т многочлена д(х). Например, в транкинговых системах TETRA используются многочлены с т = 7 и т =16.
В случае обнаружения ошибки действия приемной стороны могут быть различными. При передаче команд управления возможен запрос по обратному каналу о повторении искаженного блока. В случае передачи речевых сообщений сопутствующая этому задержка может быть недопустимо велика, поэтому чаще испорченный блок просто выбрасывается и заменяется предыдущими. В пейджинговых системах искаженный символ отмечается на экране индикатора скобками в надежде, что абонент сам по смыслу догадается о его значении.
В системах мобильной связи обнаружение ошибок используется для регулировки уровней излучаемой мощности передатчиков мобильных и базовых станций. В приемниках этих станций в режиме обмена сообщениями непрерывно подсчитывается частота появления ошибочных бит. Если на БС частота ошибок в сообщениях МС превышает заданный порог, то данной МС посылается команда на увеличение излучаемой мощности. Мобильная станция тоже измеряет и передает на БС частоту обнаруженных ошибок в принятых битах. В зависимости от частоты ошибок БС регулирует уровень мощности сигнала, адресованного этой МС (см. 5 6.1).
Преимущество линейных кодов, как уже сказано, состоит в упрощении для них максимально-правдоподобной процедуры декодирования. Для исправления ошибок и, следовательно, для оценки переданного кодового слова пространство принятых последовательностей т разбивается на 2' " смежных классов, каждый из которых характеризуется тем, что разности любых входящих в него векторов являются кодовыми словами. Для каждого класса заранее определяется максимально правдоподобный вектор ошибок Е, (nudep), сдвигающий любое кодовое слово в данный смежный класс. Задача декодера состоит в определении номера смежного класса (синдрома), в который попадает принятый вектор т. По синдрому определяется (считывается из памяти декодера) лидер Е. Каждому ненулевому синдрому может быть сопоставлен некоторый лидер. В результате максимальное число исправляемых ошибок равно 2" "— 1. Схематично процесс декодирования показан на рис. 7.2.
Если реальная ошибка, имевшая место в канале, совпадает с лидером Е = Е1, она будет исправлена.
При больших n — k наиболее сложной операцией является сопоставление синдрому вектора Е1 .
Как следует из (7.4), для однократных ошибок синдром равен транспонированному столбцу проверочной матрицы с номером, равным номеру искаженного бита. Поэтому для исправления всех однократных ошибок требуется, чтобы столбцы проверочной матрицы были ненулевыми и не повторялись. Матрица из примера 7.2 обладает этим свойством, и любая из 7 возможных однократных ошибок данным кодом исправляется. Действительно, если Е =0010000, то S 101, которому в декодере заранее сопоставлен лидер Е, = 0010000, совпадающий с фактическим вектором ошибки.

Однако указанный синдром может появиться и при возникновении двукратной ошибки, например, при Е =1100000 или Е = 0001010 . Декодер, действуя по схеме на рис. 7.4, по- прежнему добавит к принятой последовательности Е, = 0010000, так что в результате ошибка не только не исправится, но ее кратность возрастет до 3. Для исправления ошибок большой кратности требуется увеличивать кодовое расстояние.
Аппаратная сложность синдромного декодера экспоненциально растет с числом проверочных символов и потому его реализация для длинных кодов, исправляющих многократные ошибки, может оказаться проблематичной.
Примерами блоковых кодов с высокой исправляющей способностью, нашедших применение в мобильной связи, могут служить 256-ричные (15,3) РС коды, являющиеся основой вторичного канала синхронизации в 3G стандарте UMTS (см. у 12.2.11).
Для декодирования кодов БЧХ, один из недвоичных подклассов которых составляют РС коды, разработаны квазиоптимальные алгебраические алгоритмы, которые, уступая алгоритму максимального правдоподобия, тем не менее, обеспечивают исправление ошибок в пределах, гарантируемых кодовым расстоянием. В основе их лежит не векторное описание ошибок, которое, как показывают рассмотренные примеры, обладает избыточностью за счет многих нулей, а просто указание номеров позиций, в которых произошло искажение символа. Так, для задания в примере 7.2 двукратных ошибок Е =1100000 или Е = 0001010 проще сказать, что в первом случае искажены биты на 1-й и 2-й позициях, а во втором — на 4-й и 6-й.
В алгебраических алгоритмах позициям кодовых символов сопоставляются
степени примитивного элемента а расширенного
конечного поля GF(q), где q =2 =n+1 (натуральное т называется
степенью расширения поля). Для примера 7.2 последовательность номеров позиций
отображается в степени а как
а0 = 1,а1,а2,а3,а4,а5,а6, где а — примитивный элемент поля GF(2'). Тогда вышеуказанные двукратные ошибки описываются так: искажены биты на позициях а 0,а1 и а3,а5. Степени а, отвечающие позициям, содержащим ошибки, называются локаторами ошибок.
Таким образом, первая задача декодера БЧХ и РС состоит в нахождении многочлена локаторов cr(z), т.е. его коэффициентов при степенях z. Упрощенная схема декодирования кодов БЧХ включает следующие операции.
Полученная из канала последовательность Y делится на полиномы, входящие в разложение порождающего многочлена кода. Остатки от деления связаны с многочленом локаторов ключевым уравнением. Решение ключевого уравнения дает оценку многочлена o(z). Поиск корней этого многочлена и инвертирование принятых бит на позициях, соответствующих найденным корням, завершают алгоритм декодирования.
В словах кодов РС, заданных над полем GF(2 ), каждый символ представляет собой т — разрядный двоичный вектор. Поэтому для исправления ошибки недостаточно указать номер искаженного символа. Требуется еще определить значение искажения, т.е. и — разрядный компонент вектора ошибки. Последний вычисляется по многочлену локаторов и многочлену значений, полученных при решении ключевого уравнения.
Сверточные коды относятся к непрерывным рекуррентным годам. Кодовое слово является сверткой отклика линейной системы (кодера) на входную информационную последовательность. Поэтому сверточных коды являются линейными, для которых сумма любых кодовых слов также является кодовой последовательностью.
Ограничимся ниже рассмотрением лишь наиболее характерных (базовых, или материнских) для мобильной связи сверточных кодов со скоростями вида Я„=1/л,, где и, — некоторое натуральное число Последовательность символов такого сверточного кода состоит из элементарных блоков длиной и,, причем и, символов текущего блока (занимающие реальное время, отвечающее одному информационному биту) являются линейной комбинацией текущего информационного бита и т предшествующих. Значение т определяет память кода, а параметр т+1 называется длиной кодового ограниченная". Если один (например, первый) из символов текущего блока повторяет текущий информационный бит, код называется систематическим.
Способы задания сверточных кодов во многом совпадают с используемыми для линейных блоковых. Одним из основных является описание сверточного кода набором и, порождающих многочленов. Каждый многочлен устанавливает закон формирования одного из и, символов в группе и имеет степень, не превышающую т. Ненулевые коэффициенты порождающего полинома прямо указывают, какие из информационных символов (включая текущий и т предыдущих) входят в линейную комбинацию, дающую данный символ кода (см. пример 7.3). Порождающие многочлены хороших сверточных кодов найдены перебором и табулированы [44].
Весьма важным с точки зрения понимания алгоритмов кодирования и декодирования инструментом описания сверточных кодов является кодовая решетка, смысл которой должен быть ясен из следующего примера.
Промер 7.3 (см. [44]). Пусть несистематический сверточный код со скоростью Rk =1/2 и кодовым ограничением т+1=3 задается порождающими многочленами
g1,(х) = х2+ х+1 и g2,(х) = х2+1.
Это означает, что первый из двух символов каждого двухсимвольного блока является линейной комбинацией (суммой по модулю 2) текущего и двух предшествующих информационных битов, тогда как второй получается сложением по модулю 2 текущего информационного бита с тем, который поступил от источника двумя тактами раньше.
Схема кодера приведена на рис. 7.3. Заметим, что при одном из многочленов, равном единице, получился бы систематический сверточный код

Кодовая решетка этого кода показана на рис. 7.4. При ее составлении учтено, что кодер содержит память в виде двухразрядного сдвигающего регистра. Каждому из четырех возможных состояний этого регистра отвечает один из четырех узлов решетки. Поэтому левый символ в обозначении узла равен последнему информационному биту, уже записанному в регистр. При записи в регистр очередного информационного символа регистр меняет состояние на одно из двух соседних. Этот переход обозначен ребрами решетки. Порядок узлов выбран таким, что при нулевом текущем информационном символе (а, =О) переход в следующее состояние соответствует верхнему ребру, а при а, =1 — нижнему. Маркировка ребер воспроизводит п, -блок, посылаемый в канал. Каждой информационной последовательности соответствует определенный путь на кодовой решетке и кодовая последовательность, считываемая как метки, маркирующие последовательные ребра пути. К примеру, входным информационным битам 01100 отвечает кодовое слово 00 11 01 01 11, которому соответствует на рис. 7.4 путь, отмеченный жирной линией.
Известен ряд алгоритмов декодирования сверточных кодов. В практических системах и, в частности в мобильной связи, как правило, используется алгоритм Витерби, отличающийся простотой реализации при умеренных длинах кодового ограничения.
Алгоритм Витерби реализует оптимальное (максимально правдоподобное) декодирование как рекуррентный поиск на кодовой решетке пути, ближайшего к принимаемой последовательности. На каждой итерации алгоритма Витерби сопоставляются два пути, ведущих в данное состояние (узел решетки). Ближайший из них к принятой последовательности сохраняется для дальнейшего анализа как выживший, тогда как другой отбрасывается. Таким образом, если игнорировать случаи, когда оба конкурирующих пути равноудалены от принятой последовательности (о действиях в подобной ситуации см. ниже), число выживших путей, сохраняемых в памяти, равно числу узлов 2 . Основные операции алгоритма поясним для кода из примера 7.3.
Пусть передается нулевое кодовое слово, а в канале произошла трехкратная ошибка, так что принятая последовательность имеет вид 10 10 00 00 10 00 ... 00 .... Результаты поиска ближайшего пути после приема 14 элементарных блоков показаны на рис. 7.5. Промежуточные этапы работы декодера при сделанных предположениях подробно рассмотрены в [44].
На правой части рисунка видны четыре пути, ведущие в каждый узел решетки. Рядом проставлены метрики (Хэммингов расстояния этих путей от принятой последовательности на отрезке из 14 блоков). Метрика верхнего пути значительно меньше метрик нижних. Поэтому можно предположить, что верхний путь наиболее вероятен. Однако декодер Витерби, не зная следующих фрагментов принимаемой последовательности, вынужден запомнить все четыре пути на время приема L элементарных блоков. Число L называется шцруной окна декодирования. Для уменьшения ошибки

декодирования величину L следует выбирать достаточно большой, многократно превышающей длину кодового ограничения, что естественно усложняет декодер. В данном случае L =15.
Отметим, что тактика выбора и последующего анализа только одного пути с наименьшим расстоянием составляет сущность более экономного последовательного декодирования.
На средней части рис. 7.5 видно, что все пути имеют общий отрезок (сливаются от 5-го до 12-го шага) и, следовательно, прием новых блоков не может повлиять на конфигурацию этого участка наиболее правдоподобного пути. Поэтому декодер уже может принимать решение о значении информационных символов, соответствующих этим элементарным блокам.
Левая часть рисунка демонстрирует возможную ситуацию неисправляемой ошибки. Существует два пути с одинаковыми метриками. Декодер может разрешить эту неопределенность двумя способами: отметить этот участок как недостоверный или принять одно из двух конкурирующих решений (информационная последовательность равна 00000... или 10100...). Очевидно, что расширение окна декодирования не позволяет исправить такую ошибку. Ее исправление возможно при использовании кода с большей корректирующей способностью.
Поступление из канала нового элементарного блока вызывает сдвиг картинки в окне декодирования влево. В результате левое ребро пути исчезает, а справа появляется новый столбец решетки, к узлам которого должны быть продолжены сохраненные пути от узлов предыдущего столбца. Для этого выполняются следующие операции.
1. Для каждого узла нового столбца вычисляются расстояния между принятым блоком и маркировкой ребер, ведущих в данный узел.
2. Полученные метрики ребер суммируются с расстоянием путей, которые они продолжают.
3. Из двух возможных путей оставляется путь с меньшей метрикой, а другой отбрасывается, так как следующие поступающие блоки не могут изменить соотношения расстояний этих путей. В случае равенства расстояний или случайно выбирается один путь, или сохраняются оба.
В результате этих операций к каждому узлу нового столбца вновь ведет один путь. Например, пусть новый блок из канала равен 00. Рассмотрим продолжение пути к нижнему узлу решетки, в который можно попасть из состояния кодера 10 по ребру 01 или
из состояния 11 по ребру 10 (см. рис. 7.4). В обоих случаях расстояние этих ребер от принятого блока 00 равно 1. Однако суммарное расстояние пути, продолженного из состояния 10, равно 6, а пути из состояния 11 равно 7. Поэтому второй путь будет отброшен вместе с ребром 01, которое входило в нижний узел на предыдущем шаге декодирования (см. рис. 7.5).
Оценка информационного символа производится по крайнему левому ребру пути в окне декодирования. Согласно правилу построения кодовой решетки принимается, что информационный символ равен 0, если это ребро верхнее, и 1, если ребро нижнее.
Рассмотренный пример поясняет работу декодера в предположении, что выходной сигнал демодулятора квантуется на 2 уровня (так называемое жесткое декодирование). Большее число уровней квантования приводит к мягкому декодированию. Установлено, что 8 уровней квантования гарантируют практически потенциальную достоверность декодирования [45].
Чтобы в этом случае использовать алгоритм Витерби, требуется вместо расстояния Хэмминга ввести новое расстояние, точнее учитывающее различие между принятой последовательностью (выходным многоуровневым сигналом демодулятора) У и ожидаемым двоичным кодовым словом С. Например, можно использовать евклидово расстояние или расстояние
На рис. 7.6 приведен размеченный граф канала при 4 уровнях квантования, которым приписаны числа тi, равные 0, 1, 2, 3.
Граф позволяет определить меру расходимости между ребрами пути на кодовой
решетке и принятыми символами. Если,

например, на выходе демодулятора у; = 2, а маркировка ребра проверяемого пути имеет с; = О, то мера расходимости равна 2. При у, = 2 и наличии на ребре метки с, = 1 расходимости т; =1. Эти числа суммируются в пределах кадра и, и добавляются к мере расходимости продолжаемого пути. Дальнейшие операции алгоритма Витерби при мягком декодировании совпадают с операциями жесткого декодирования. Выигрыш мягкого декодирования составляет около 2 дБ. Так как сложность вычислений при этот возрастает незначительно, то мягкое декодирование широко используется в современных системах мобильной связи.
Турбо-коды, предложенные сравнительно недавно [37|,
являются результатом совместного использования идей сверточного кодирования с
мягким решением и перемежения символов, рассматриваемого в ~
7.3. Блок А из k
информационных бит через перемежителю поступает на N элементарных
систематических сверточных кодеров. Они могут быть различными и иметь разные
скорости. Структурная схема кодера при N 2 показана на рис. 7.7.

На выходах элементарных кодеров 1 и 2 формируются две последовательности проверочных бит В и В>, что дает скорость, равную 1/3. В общем случае, если кодеры одинаковы, скорость кода равна RД =1/(И+1).
Декодирование турбо-кода выполняется элементарными декодерами с мягким решением с учетом перемежения символов, выполненного на передающей стороне. Структурная схема турбо- декодера для N = 2 показана на рис. 7.8.
Перемежители (П), идентичные перемежителю кодера, согласовывают порядок
поступления бит А и оценок этих бит, вырабатываемых
декодером 1. Деперемежители (ДП) восстанавливают порядок поступления оценок с
выхода декодера 2 для первого декодера. Таким образом, при оценке символа
учитываются не только принятые биты, но и мягкие решения, вынесенные каждым
элементарным декодером. Турбо-коды являются единственными из известных, позволяющими работать со скоростями, близкими пропускной способности канала с
ограниченной полосой. Согласно документам 36РР (см. гл. 12) их планируется
использовать в мобильных системах третьего поколения.

Большинство из известных хороших кодов ориентировано на модель случайных независимых ошибок, т.е. канал без памяти. Для систем же мобильной связи (в числе многих других) характерны глубокие замирания радиосигнала (см. гл. 3), означающие корреляцию ошибок, в результате которой последние группируются в пакеты. При этом появление на выходе демодулятора L >1 неверных символов может стать более вероятными, чем появление только одного. В принципе существуют специальные коды, корректирующие пакетные ошибки большей кратности, чем кратность контролируемых случайных ошибок [43], однако на практике чаще прибегают к более испытанному средству, каковым является перемещение, приспосабливающее традиционные коды к каналам с памятью.
Поясним смысл перемежения для блоковых кодов. Пусть биты каждого кодового слова посылаются в канал не друг за другом, а через интервалы, превышающие длину пакета ошибок Е. В промежутки между битами одного слова вставляются биты других кодовых слов, как это показано на рис. 7.9.
Тогда пакет Е, по-прежнему искажая в канале L подряд битов, тем не менее, исказит всего по одному биту разных L кодовых слов. На приемной стороне производится обратная перестановка (деперемежение). Биты каждого кодового слова собираются вместе и декодируются алгоритмами, разработанными для независимых ошибок. Поэтому говорят, что перемежение трансформирует канал с пакетами ошибок в канал с независимыми ошибками.


Предложено много алгоритмов перемежения, в частности по периодическим и псевдослучайным законам, блочные и Сверточные [45].
При блочном перемежении входные биты делятся на блоки по k бит, которые последовательно записываются в J строк таблицы, приведенной на рис. 7.10. Количество столбцов в ней
Считывание по столбцам дает выходную последовательность, в которой соседние входные биты разнесены на J позиций (см. рис. 7.9). Деперемежение заключается в выполнении обратных действий: записи принятой последовательности Y в столбцы такой же таблицы и считывания по строкам. Для борьбы с длинными пакетами ошибок желательно увеличивать размеры таблицы. Однако это приводит к увеличению задержки в отправке и декодировании сообщения.
Алгоритм перемежения может быть задан аналитически. Так, соответствие выходных бит перемежителя входным
В стандарте TETRA, например, ./ = 103, k = 412. Следует отметить, что если некоторые параметры правил перемежения сделать секретными, например, считывать столбцы в таблице рис. 7.10 в порядке, определяемом секретным ключом, то получится шифрование данных методом перестановки.
8. ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ В МОБИЛЬНЫХ СИСТЕМАХ
СВЯЗИ
В силу свободы доступа к радиоэфиру системы беспроводной связи потенциально уязвимы для разного рода злоумышленников в плане как перехвата сообщения с последующим несанкционированным использованием чужой информации, так и попы- ток обмана сети и абонентов. Поэтому стандарты систем мобильной связи предусматривают различные механизмы защиты интересов законных пользователей и самой сети от подобных действий. К таким механизмам относятся шифрование данных и процедуры аутентификации.
Шифрование состоит в преобразовании исходного, открытого текста в криптограмму (шифртекст) по некоторому правилу (алгоритму шифрования) с целью скрыть смысл сообщения. Некоторые параметры этого алгоритма, называемые ключом шифрования, известны только законным абонентам и неизвестны (секретны) для злоумышленников. Законный пользователь легко может осуществить обратное преобразование шифровки в исходный текст, а криптоаналитик, т.е. субъект, пытающийся несанкционированно получить открытый текст, будет вынужден угадывать значение ключа.
В зависимости от степени секретности сведений, содержащихся в сообщении (государственных, военных, коммерческих, личных и т.п.), разрабатываются и используются различные системы шифрования. При их создании учитываются и возможности аналитика как интеллектуальные, так и технические. Ясно, что закрыть информацию от злоумышленника-одиночки проще, чем от другого государства, располагающего возможностью привлекать для раскрытия ключа крупных специалистов и новейшую технику.
Обычно разрабатывают систему шифрования, стойкую по отношению к фрагменту открытого текста. При этом предполагается, что аналитику известны криптограмма, алгоритм шифрования и фрагмент открытого текста, который он может сопоставить
с криптограммой. Поэтому стойкость системы шифрования, т.е, свойство противостоять действиям аналитика по вскрытию исходного текста, определяется трудностью разгадывания ключа.
Для оценки стойкости выдвигаются различные критерии. Наиболее объективный — это сложность (число умножений) существующего алгоритма вскрытия ключа. Если известны только алгоритмы вскрытия экспоненциальной сложности, у которых число операций пропорционально а, где а — целое, а и — число неизвестных параметров, то считается, что система шифрования обладает совершенной стойкостью. Подобные алгоритмы решения задачи реализуют прямой перебор вариантов. Так как аналитик при любых условиях может воспользоваться подбором параметров (силовой атакой), то нельзя разработать систему, обладающую стойкостью, превышающей совершенную. Другие системы шифрования, для которых известны алгоритмы вскрытия ключа меньшей сложности, — например, полиномиальная (линейная) с числом операций, пропорциональным и', — считаются системами малой стойкости.
Другой важной характеристикой систем шифрования является быстродействие алгоритмов шифрования и дешифрования при знании ключа.
Множество систем шифрования разделяют на симметричные, одноключевые, и асимметричные, двухключевые, или системы с открытым ключом [47 — 49].
В классических симметричных системах для шифрования и расшифрования используется один и тот же ключ. В асимметричных системах для получения шифрограммы используется открытый, известный всем (и злоумышленнику) ключ, а для получения по шифровке исходного текста — другой, секретный, известный только законному получателю сообщения. Между этими ключами существует связь, обеспечивающая правильную расшифровку, но не позволяющая определить секретный ключ по открытому. Рассмотрим принципы построения названных систем шифрования.
8.1
1. Симметричные системы шифрования
Структурная схема системы секретной связи показана на рис. 8.1.
На передающей стороне исходный текст Х =(Х1, Х2,..., Хn)
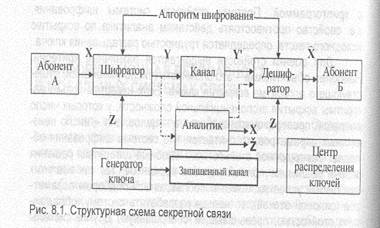
с помощью известного
алгоритма и секретного ключа 2 = (Z,, Z,, ..., ZД) преобразуется в
шифрограмму У = (У,, У, ..., У„) . Компоненты
этих последовательностей мокнут быть битами, символами, взятыми из одного или
нескольких алфавитов разных объемов. Обычно это биты. На приемной стороне по
известным и 2
восстанавливается исходный текст Х .
Аналитик, перехватив шифрограмму, пытается понять исходный текст или определить ключ шифрования. Кроме того, он может внедрить в систему собственную, фальшивую криптограмму с целью обмана абонента Б. Таким образом, система шифрования должна обеспечить не только секретность связи, но и защиту от несанкционированного изменения, подмены сообщения Х. Последняя задача, называемая аутентификацией сообщения или контролем целостности, обсуждается в 8.2.
Из этой схемы видно, что для оперативной доставки ключа шифрования на приемную сторону должен быть предусмотрен специальный, защищенный канал. Возникает задача распределения ключей шифрования между пользователями или задача управления ключами. При большом числе абонентов, желающих установить секретную связь, распределение ключей становится серьезной проблемой при использовании симметричных систем шифрования. Решение этой задачи и стимулировало разработку асимметричных методов шифрования.
Теория и многовековая практика позволили сформулировать ряд требований к ключам систем шифрования повышенной стойкости. С позиций теории информации наибольшие трудности по вскрытию криптограммы без знания ключа возникают, если в ней отсутствует информация о Х, что означает использование преобразований, обеспечивающих статистическую независимость случайных процессов Х и Y.
Анализ этого требования приводит к следующим рекомендациям. Конкретное
значение ключа должно использоваться только один раз для шифрования одного
сообщения. Значения ключа должны выбираться с одинаковой вероятностью 1/L, где L
— объем алфавита символов ключа. Длина ключа k должна быть не меньше длины
сообщения и.
На практике из-за сложности реализации и стоимости не все перечисленные
требования могут быть выполнены. Для построения практических систем шифрования
используются принципы рассеяния и перемешивания. Первый требует, чтобы изменение
одного символа исходного текста приводило к изменению большого числа символов
криптограммы. Второй направлен на поиск преобразований, разрушающих
статистические связи между Y и Х.
Общий подход к построению практически стойких шифров состоит в многократном применении простых методов шифрования путем подстановки (замены) и перестановки символов исходного текста, а также скремблирования.
Метод подстановка заключается в том, что символ исходного текста заменяется другим, выбранным из этого или другого алфавита по правилу, задаваемому ключом шифрования. Место - положение символа в тексте при этом не изменяется.
При перестановке в соответствии с ключом изменяется порядок следования символов открытого текста. Значение символа при этом сохраняется. Шифры перестановки являются блочными, т.е. исходный текст предварительно разбивается на блоки, в которых и осуществляется заданная ключом перестановка.
Под скремблированием понимается процесс наложения на коды символов открытого текста кодов случайной последовательности чисел, которую называют также гаммой (по названию буквы у греческого алфавита, используемой в математических формулах для обозначения случайного процесса). Гаммирование относится к поточным методам шифрования, когда следующие друг за другом символы открытого текста последовательно превращаются в символы шифрограммы, что повышает скорость преобразования.
В качестве гаммы широко используются псевдослучайные последовательности (ПСП). Коды символов криптограммы У; есть поразрядная сумма по модулю 2 кодов X; и Z;. Расшифровка производится по правилу: X = Y'+Z = X+Z+Z = X, так что на приемной стороне должна генерироваться такая же ПСП и с той же фазой. Стойкость скремблирования определяется параметрами ПСП, главным из которых является период последовательности. На практике используются генераторы ПСП с периодом в несколько недель. Из-за простоты генерации хороших ПСП и высокой скорости шифрования — дешифрования скремблирование предусмотрено многими стандартами мобильной связи (GSM,
TETRA, IS-95).
Чтобы затруднить аналитику вычисление элементов ПСП при сопоставлении фрагментов открытого текста и шифровки, применяется обратная связь по выходу и шифртекст. На рис. 8.2 поясняется принцип введения обратной связи по шифртекст.
Сначала передается преамбула, в которой содержится ин- формация о параметрах генерируемой ПСП, в том числе и о значении начальной фазы Z~,. По каждым и сформированным сим- волам шифрограммы вычисляется и устанавливается в генераторе новое значение фазы Z;. Обратная связь делает метод Гаммирование чувствительным к искажениям криптограммы. Так, из-за помех в канале связи могут исказиться некоторые принятые символы, что приведет к вычислению ошибочного значения фазы ПСП и затруднит дальнейшую расшифровку. В то же время такое искажение можно объяснить попыткой злоумышленника навязать ложные данные.

Следует отметить, что в отечественном стандарте на шифрование предусмотрено использование подстановок, перестановок и гаммирования.
Распределение ключей в симметричных системах шифрования является серьезной задачей, если число законных пользователей велико. Протокол распределения ключей должен предусматривать запрет на передачу по радиоканалу сеансового ключа и возможность оперативно изменять ключ.
Обычно протокол распределения включает два этапа. При регистрации МС в сети центр аутентификации (ЦА) выделяет ей секретное число, К, которое хранится у нее в стандартном идентификационном модуле (SIM). Второй этап протокола в упрощенном варианте для стандарта GSM показан на рис. 8.3.

При необходимости осуществить секретную связь МС посылает запрос на шифрование. ЦКМС генерирует случайное число RAND (random number), которое передается на МС и используется на обеих сторонах для вычисления единого сеансового ключа К, по алгоритму А8. Из-за помех в радиоканале возможно искажение RAND, и ключ на МС будет отличаться от вычисленного ЦКМС. Для проверки идентичности ключей служит числовая последовательность ключа (ЧПК), являющаяся кодом его хэш- функции (см. ~ 8.2). Любые изменения ключа К, с большой вероятностью приводят к изменению ЧПК, но по ЧПК трудно определить значение К,. Поэтому перехват ЧПК в радиоканале не снижает стойкости шифра. После подтверждения правильности установки ключей производится поточное шифрование данных по алгоритму А5.
В системах мобильной связи общего пользования для шифрования используются алгоритмы, предусмотренные соответствующими спецификациями (стандартный уровень секретности). В корпоративных системах допускается использование своих, оригинальных шифров (повышенный уровень секретности).
8.1.2. Асимметричные системы шифрования
В асимметричных системах шифрования каждый абонент имеет два связанных между собой ключа: открытый и секретный. При необходимости установления секретной связи абоненты обмениваются открытыми ключами по незащищенным каналам, и, следовательно, открытые ключи могут быть известны вceм пользователям (и злоумышленнику). Секретный ключ хранится абонентом в тайне. Определение секретного ключа по открытом) практически невозможно, так как требует несоизмеримых с ценностью получаемой информации вычислительных затрат.
Любой абонент может послать шифрованное сообщение другому абоненту, используя его открытый ключ. Вскрыть такое сообщение может только адресат по своему секретному ключу. Таким образом, отпадает необходимость в распределении ключей шифрования между абонентами.
Предложено много асимметричных систем шифрования (RSA, ранцевая система, Эль-Гамаля, Мак-Элиса и др.), основанных на использовании односторонних или однонаправленных функций.
Функция Y =f(X) называется односторонней, если для вычисления У по Х существует алгоритм полиномиальной сложности, а для
определения Х по У известны только алгоритмы экспоненциальной сложности. Иначе,
найти У по Х легко, а Х по У трудно. Строгого
доказательства, что данная функция является односторонней, не существует, так
как прогресс в математике может привести в будущем к получению решения
приемлемой сложности для задач, ранее считавшихся трудноразрешимыми. Известны
многие функции, претендующие на звание односторонних.
Ярким представителем этого множества является показательная функция в кольце
вычетов по некоторому модулю.
Поясним ее одно направленность на числовом примере.
Видно, что для вычисления У потребовалось всего 16 умножений и делений, которые при выбранном модуле сводятся просто к удержанию 4 младших разрядов результатов возведения в квадрат.
Обратная задача — вычисление дискретного логарифма— практически неразрешима. Действительно, если, например, У = 5678, то сравнение (8.2) иначе записывается как равенство ах = * *...* 5678, где символ * обозначает неизвестную десятичную цифру. Значения этих неизвестных цифр можно восстанoвить лишь одновременно со значением Х, перебрав все варианты последнего, количество которых зависит от используемой разрядности чисел. При разрядности в 100 — 300 десятичных цифр подобный перебор на самых мощных ЭВМ занял бы время, не выражаемое даже геологическими эпохами.
Однако функция (8.1) "в одиночку" для целей шифрования непригодна, так
как законный получатель, определяя исходный текст Х по шифрограмме т,
будет испытывать те же трудности,
что и криптоаналитик. Поэтому для законного абонента вводится лазейка (потайной ход), использование которой приводит к резкому снижению затрат на вычисление обратной функции.
Односторонней функцией с лазейкой называется функция У = fz(X), обладающая следующими свойствами:
• для вычисления У по Х существует алгоритм полиномиальной сложности;
• для вычисления Х по У при известном Z также существует алгоритм полиномиальной сложности;
• для вычисления Х по У при неизвестном Z существует только алгоритм экспоненциальной сложности.
Из определения видно, что Z играет роль секретного ключа, находящегося у законного получателя шифрограммы. Отсюда ясен механизм создания шифров с открытым ключом. Для трудноразрешимой задачи формулируются условия, знание которых позволяет создать алгоритм ее решения полиномиальной сложности. Эти условия и составляют секрет законного пользователя.
В качестве примера рассмотрим асимметричную систему шифрования RSA (Ривест, Шамир, Адлеман). В ее основу положена трудноразрешимая задача разложения (факторизации) большого числа на простые множители. Сложность факторизации числа иллюстрирует следующий факт. Для разложения числа, содержащего около 130 десятичных цифр, потребовалась работа 1600 ЭВМ в течение 8 месяцев.
Пусть и = p q где р. и д — простые числа, т.е. не имеющие делителей, кроме 1 и самих себя. Каждый пользователь, выбрав р и q и случайное d, находит соответствующее е как решение сравнения т.е. получает свои открытый (e,n) и секретный (d,n) ключи. Для криптоаналитик определение d по известному (открытому) е означает факторизацию и, сложность которой уже обсуждалась.
Шифрованию открытого текста Х предшествует преобразование его по определенному правилу в целое число Х (в простейшем виде оно поясняется в примере 8.2). Вычисление криптограммы в адрес данного пользователя производится по формуле
У = Х , что согласно сказанному ранее не позволяет аналитику
получить
Х по известному У. Адресат же по своему секретному ключу легко находит сначала целое Х
Х=У" modn, а затем по
нему восстанавливает исходный текст Х, т.е. d является той лазейкой,
которой пользуется законный абонент при расшифровке У.
Авторы системы RSA рекомендуют для обеспечения высокой стойкости использовать числа, содержащие около 200 десятичных цифр. Хотя разработаны специальные вычислители, позволяющие быстро возводить числа в большие степени, быстро - действие RSA считается низким.
Асимметричные системы шифрования характеризуются высокой теоретической
стойкостью. Однако их внедрение сдерживается недоверием со стороны практиков.
Как уже указывалось, всегда существует опасность, что успехи математиков
приведут к приемлемому по сложности решению задачи, ранее считавшейся трудной. И
история шифрования знает такие примеры. Так, для ранцевой системы шифрования,
основанной на одностороннем преобразовании У=Х то, где Х, — столбцы целых чисел, был найден
алгоритм определения Х по У с числом операций меньшим, чем при прямом
переборе значений Х.
В то же время в асимметричных системах не требуется распределять ключи шифрования. Поэтому считаются перспективными гибридные системы, в которых асимметричная система служит для распределения сеансовых ключей, а шифрование данных выполняется с помощью симметричной системы. Классический протокол распределения ключей, основанный на односторонней функции (8.1), показан в табл. 8.1.
Абоненты случайно и независимо выбирают числа с(, и Cf6 и держат их в секрете. По (8.1) каждый вычисляет свой открытый

ключ (е или ee ) и посылает его другому абоненту. Из-за односторонности (8.1) по открытым ключам трудно определить секретные. При установлении режима шифрования каждый из абонентов вычисляет сеансовый ключ. Для этого открытый ключ другого абонента возводится в степень, равную своему секретному ключу. Из табл. 8.1 видно, что такие вычисления дают одинаковый результат Z e = ZeA, который можно использовать как сеансовый ключ в симметричной системе шифрования. Важно отметить, что распределение ключей произошло без передачи секретных параметров по каналу связи.
8.2.
Идентификация и аутентификация в системах мобильной
связи
Процедуры идентификации и аутентификации предназначены для защиты законных абонентов от попыток обмана со стороны злоумышленников.
Под идентификацией оборудования понимается процедура отождествления МС, претендующей на услуги сети, с одной из множества зарегистрированных в ЦКМС. Идентификатор МС обычно содержит коды изготовителя и места сборки МС, электронный серийный номер. Процедура идентификации позволяет сети узнать статус этой МС, т.е. перечень предоставляемых услуг, уровень приоритета в получении доступа, установления канала связи и т.п. В системе связи стандарта GSM в регистре идентификации оборудования ЦК имеется три списка: белый, серый и черный. МС, занесенной в белый список, разрешено пользоваться сетью. В сером списке хранятся идентификаторы МС, имеющих неурегулированные вопросы с сетью (требуют ремонта, имеют задолженности по оплате услуг). В черный список включены утерянные или украденные МС, а также незаконно размноженные (клонированные). Следует отметить, что, кроме идентификации оборудования стандарты систем связи предусматривают и другие виды идентификации (абонента, управления, сети).
Под аутентификацией понимается процедура установления подлинности какого-то объекта. Различают аутентификацию сообщения, абонента, устройства, массивов данных. Поясним принципы построения этих процедур.
8.2.1. Аутентификация сообщения
Целью аутентификации сообщения является подтверждение или отрицание следующих предположений:
• сообщение исходит от законного абонента;
• сообщение при передаче не изменилось;
• сообщение доставлено по требуемому адресу;
• последовательность принятых сообщений соответствует последовательности отправленных.
Проверка подлинности особенно важна для шифрограмм, поскольку у получателя они вызывают больше доверия, чем открыта текст. Методы аутентификации разрабатываются в предположении, что установление подлинности производится исключительно по самому сообщению без привлечения каких-либо внешних средств. Для этого на передающей стороне в сообщение Х вводится дополнительно код хэш-функции, который также называют сигнатурой, контрольной комбинацией, имитовставкой, дайджестом сообщения [48, 49]. Как уже отмечалось, сообщение Х предварительно преобразуется в число или набор чисел Х.
Хэш-функция И(Х) отображает Х произвольной длины / в последовательность
символов фиксированной длины и. Чтобы снижение скорости передачи при таком
дополнении не было значительным, естественно требование: т « /.
Проверка подлинности сообщения (Х,И(Х)) заключается в сравнении h '(Х), вычисленного по принятому Х, со значением И(Х), выделенным из самого сообщения. Если они равны, то принимается решение, что при передаче (Х,И(Х)) не измени- лось. В противном случае фиксируется искажение переданного сообщения.
Так как т «/, то возможно, что нескольким сообщениям называемым коллизиями, соответствует одно значение хэш-функции . Ясно, что замена переданного сообщения на любую коллизию не будет обнаружена при проверке подлинности. Вероятность успешной подделки сообщения определяется разрядностью значения h(X) . На практике используются длины в 64-150 бит. К хэш-функции предъявляются следующие требования: чувствительность к всевозможным изменениям в тексте (вставки, изъятия, перестановки и пр.), отсутствие эффективных алгоритмов поиска коллизий, одно направленность, простота вычислений значения h(X) .
Отметим, что необходимость одно направленности следует из описания, например, протокола распределения ключей (рис. 8.3).
Предложено много способов хеширования. Разработан и государственный стандарт на имитовставку. В качестве примера рассмотрим хэш-функцию
Однако и злоумышленник, зная алгоритм хеширования, может создать фальшивое или изменить истинное сообщение, вычислить и добавить правильное значение хэш-функции. Поэтому рекуррентная процедура типа (8.4) выполняется с использованием секретных параметров. В качестве ключей могут выступать специальные секретные числа, значения Н,, блоки сообщения Х, и их комбинации. На рис. 8.4 показана возможная схема шифрования хэш-функции, когда в качестве ключа используется ее предыдущее значение.
Рассмотренная процедура аутентификации предполагает наличие доверия между абонентами, обменивающимися информацией, т.е. защищает от обмана со стороны внешнего нарушителя. В жизни существует много ситуаций, когда доверие между

абонентами отсутствует (обмен электронными документами между коммерческими организациями, между клиентом и банком и т.п.). В этом случае возможен обман со стороны законных абонентов. Например, отправитель абонент А может впоследствии отказаться от своего сообщения, получатель может изменить (подменить) полученный документ и утверждать потом, что в таком виде его прислал абонент А.
Прогнозы развития систем мобильной связи показывают, что наибольших успехов следует ожидать в области электронной коммерции [37]. Предполагается, что с помощью мобильного телефона можно будет совершать всевозможные банковские операции. В этих условиях становится важной задача защиты от возможного обмана законными абонентами.
Для аутентификации сообщений при отсутствии доверия используется электронная подпись. Ее назначение аналогично функциям ручной подписи на бумажных документах. Однако принадлежность ручной подписи данному тексту обеспечивается целостностью бумаги, на которой написан документ и поставлена подпись. В электронном виде единство документа и соответствующей ему подписи достигается за счет введения связи между тенистом и видом подписи.
Поясним эту технологию на примере системы RSA. Пусть (d, n) и (e, n) — соответственно секретный и открытый ключи абонента А.
Постановка электронной подписи (ЭП) под документом Х заключается в его хешировании и шифровании значения хэш- функции H Д с помощью секретного ключа (d, n). К Н„могут добавляться идентификатор абонента. А, номер сообщения, время отправления и другие сведения, предназначенные для защиты от возможного обмана. В результате подписанный документ имеет вид Y = (Х, ЭП), где ЭП = Н„" modn.
Проверка подписи А абонентом Б включает следующие операции:
• расшифровку ЭП с помощью открытого ключа абонента
• вычисление по Х значения хэш-функции
• сравнение
Если эти значения равны, то принимается решение, что Х — подлинное сообщение, исходящее от абонента А. Различие означает, что либо Х изменено (может быть и из-за искажений в канале связи), либо отправлено другим абонентом.
Абонент А не может отказаться от Y, так как только он, обладая секретным ключом, способен создать ЭП, при расшифровке которой с помощью его открытого ключа будет выполняться равенство. Абонент Б не может изменить Х и выдать его за истинное, так как, не зная ключа (d, n), не может создать ЭП, соответствующую измененному Х. Выделение из Y электронной подписи и присоединение ее к новому документу также будет обнаружено: фальшивому сообщению соответствует значение Н, не равное Н. Обман будет успешным, если истинное Х заменяется его коллизией.
Следует указать на идейную общность методов защиты сообщений от помех (см. гл. 7) и от злоумышленников. В обоих случаях в сообщение вводятся дополнительные символы, функционально связанные с сообщением. В помехоустойчивых кодах эти связи выбираются так, чтобы можно было обнаруживать и исправлять наиболее вероятные искажения в канале связи. Для защиты от злоумышленника функциональные зависимости делаются секретными, при этом учитываются интеллектуальные и технические возможности противника. Принципы построения помехоустойчивых кодов могут быть применены и для шифрования. Так, известна асимметричная система шифрования Мак - Элиса, основанная на сложности декодирования линейных кодов.
8.2.2. Аутентификация абонента
Назначением аутентификации абонента является установление подлинности абонента, претендующего на услуги сети. Для этого разработаны криптографические протоколы, в результате выполнения которых законные пользователи достигают своих целей, а притязания злоумышленников отвергаются.
Самым распространенным методом аутентификации является использование паролей — секретной последовательности символов (букв и/или цифр). При попытке доступа к устройству абонент вводит свой пароль, который сравнивается с хранящимся в памяти устройства и приписанным данному абоненту. Доступ разрешается только в случае их совпадения. Так, в стандарте GSM пароль, так называемый PIN (personal identification number) код, служит для активизации МС. Трехкратный неправильный ввод PIN кода блокирует SIM карту и работа данной МС запрещается.
Парольная аутентификация обладает хорошей стойкостью при условии использования достаточно длинного, случайного пароля, а также, если предусмотрена защита от перехвата пароля при его вводе и от несанкционированного считывания его из памяти устройства. Так как МС при вводе PIN кода находится в руке абонента, можно считать, что эти требования выполняются.
Для удаленных устройств используются более сложные протоколы, защищающие от возможного перехвата передаваемых сигналов. Они реализуют npuнциn доказательства с нулевым знанием или с нулевым разглашением. Абонент (МС) не предъявляет проверяющему (ЦКМС) собственный секрет, а только демонстрирует, что им владеет. Обычно абоненту предлагается вычислить значение некоторой функции и сообщить его проверяющему, который также способен провести подобные вычисления. Сравнение этих значений позволяет установить подлинность абонента.
На рис. 8.5 приведена упрощенная схема аутентификации MC в сотовой системе стандарта GSM (см. также рис. 8.3). При поступлении от МС запроса ЦКМС передает в ответ случайное число RAND. По алгоритму A3 с помощью секретного числа К;, полученного МС при регистрации и хранящегося в SIM, абонент вычисляет отклик SRES (signed response) и сообщает его ЦКМС. Центр коммутации независимо вычисляет SRES' и сравнивает его с принятым по радиоканалу. При их совпадении МС посылается сигнал подтверждения о состоявшейся аутентификации. При несовпадении — сигнал о том, что опознание не состоялось.
Здесь секретом, который при обмене не разглашается, является число К;. Чтобы по перехваченным сигналам RAND

и SRES нельзя было вскрыть секрет К,, SRES вычисляется односторонней функцией.
В корпоративных системах вводится защита от имитации центра связи. Абонент должен быть уверен, что получил доступ к законной системе, а не созданной противником. Так, в транкинговых системах стандарта TETRA наряду с аутентификацией МС предусматривается аутентификация сети. Принципиально она не отличается от показанной на рис. 8.5, только проверяющим подлинность является абонент, а не сеть.
Применяя псевдонимы, связанные с идентификаторами IMSI, оперативно изменяемые в процессе взаимодействия МС с ЦКМС, можно, помимо прочего, засекретить местоположение МС. Так, в системе GSM после каждой регистрации МС присваивается новый временный идентификатор TMSI (см. рис. 8.5). Секретность направлений обмена сообщениями между абонентами обеспечивается ЦКМС путем закрытия сигналов управления.
9. КОДИРОВАНИЕ СООБЩЕНИЙ ИСТОЧНИКА
Из теории информации известно, что максимальное количество информации содержится в сообщениях, составленных из равновероятных и независимых символов. Реальные источники создают сообщения, которые не обладают указанными свойствами. Из-за этого длина сообщений оказывается больше необходимой при сохранении того же количества информации. Говорят, что источник или его сообщения обладают избыточностью. Так, избыточность русского языка составляет около 75%, что соответствует удлинению машинописного текста примерно в 4 раза.
Эта избыточность, с одной стороны, полезна, так как позволяет человеку находить опечатки в тексте и исправлять их. С другой стороны, вредна, если требуется запомнить сообщение или передать по каналу связи. Естественную избыточность технически сложно использовать для борьбы с искажениями в канале. Кроме того, величина ее может быть слишком велика для канала качества, что снизит эффективность его применения. Поэтому согласование реального источника с каналом связи происходит в два этапа. Сначала естественную избыточность устраняют с помощью экономного или статистического кодирования, так называемого сжатия данных. Затем вводится новая избыточность в форме, позволяющей на приемной стороне создать устройства обнаружения и исправления ошибок (см. гл. 7).
Множество алгоритмов экономного кодирования делится на две группы. К первой относятся правила, позволяющие восстановить исходное сообщение без погрешности (алгоритмы Шеннона- Фано, Хаффмена, словарные методы сжатия). Вторая группа объединяет методы, допускающие восстановление с заданной погрешностью (алгоритмы сжатия аналоговых сигналов, в частности, речи).
9.1.
Методы кодирования источника без потерь информации
Современные системы мобильной связи наряду с передачей речи обеспечивают передачу факсимильных и текстовых сообщений.
Для сжатия факсимильных сообщений рекомендуется использовать коды Хаффмена [50]. В результате строчной развертки оригинала формируется последовательность нулей и единиц, соответствующих белым и черным элементам изображения. Избыточность проявляется в том, что число подряд следующих нулей или единиц (длина серий) имеет разную вероятность появления. Поэтому кодированию по Хаффмену подвергаются серии нулей и единиц, при этом наиболее вероятным сериям сопоставляются самые короткие кодовые слова.
Для сжатия текстовых сообщений разработаны словарные методы или алгоритмы сжатия семейства LZ, названные так по первым буквам фамилий авторов Лемпеля и Зива [51]. В отличие от статистических алгоритмов Хаффмена, Шеннона — Фано, для их реализации не требуется знать распределение вероятностей сообщений источника.
В основе этих алгоритмов лежит создание и использование на передающей и приемной сторонах особой информационной структуры — словаря, содержащего последовательности символов (строки), которые ранее реально создавались источником.
Кодирование вновь поступающей от источника последовательности заключается в поиске в словаре самой длинной строки, совпадающей с этой последовательностью, и передаче по каналу ее номера (индекса). На приемной стороне по полученному номеру из идентичного словаря извлекается (восстанавливается) кодируемая последовательность.
Словарные методы отличаются способом организации словаря, алгоритмом поиска совпадений, видом ссылки на найденное совпадение. Наиболее трудоемкой операцией является поиск в словаре самого длинного совпадения.
Так как источник может создать последовательность символов, еще не включенную в словарь, то возникает задача обновления словаря одновременно в кодере и в декодере. Словарь должен адаптироваться к источнику сообщений.
С течением времени число различных последовательностей, созданных источником, возрастает, что приводит к увеличению числа строк в словаре, т.е. к увеличению разрядности номера строки. Чтобы ограничить размеры словаря и разрядность номера, применяется очистка. Так, при достижении максимального размера созданный словарь уничтожается и строится новый.
9.2.
Кодирование речевых сообщений
Передача речи является основным, обязательным режимом работы систем мобильной связи. Звук с помощью акустоэлектронного преобразователя (микрофона) превращается в аналоговый электрический сигнал. Поскольку в цифровых системах связи канальному кодированию (см. гл. 7) подвергается последовательность бит, аналоговый речевой сигнал должен быть представлен в цифровой форме. При этом для эффективного использования канала требуется устранить его избыточность до величины, позволяющей на приемной стороне восстановить по нему звук с сохранением индивидуальных особенностей голоса (натуральность).
За длительный период развития телефонной связи были достаточно подробно изучены характеристики речи и устройство речевого аппарата человека. Так, установлено, что для обеспечения приемлемого качества восстановленной речи достаточно анализировать (передавать) речевой сигнал в полосе частот 300...3400 Гц. Выяснены и причины большой избыточности речевого сигнала. К ним относятся:
• неравномерное распределение значений (отсчетов) сигнала (редки большие отсчеты);
• высокая корреляция соседних отсчетов;
• корреляция удаленных отсчетов, обусловленная периодичностью сигнала;
• корреляция между периодами основного тона (см. далее);
• избыточность из-за пауз между слогами, словами, фразами при монологе, которые составляют (в среднем) до 25% времени разговора, и пауз, когда надо слушать собеседника (до 50% времени).
Задача устранения этой избыточности возлагается на речевые
кодеки — устройства, осуществляющие кодирование речевого сигнала и его
декодирование (восстановление). Основная проблема при разработке кодеков состоит
в получении высокой степени сжатия без чрезмерного снижения качества
восстановленной речи. Таким образом, основными характеристиками кодеков являются
скорость преобразования
число бит на выходе кодера на интервале времени М, и качество восстановленной речи. Скорость преобразования R, является важной характеристикой речевых кодеков, так как определяет требуемую пропускную способность канала для передачи речи. Сжатие сигнала тем больше и, следовательно, кодек тем эффективнее, чем меньше R, (при обеспечении требуемого качества восстановленной речи).
Для оценки качества восстановленной речи предложены объективные и субъективные методы и критерии. Поскольку получателем речевого сообщения является человек, важно оценить его субъективное восприятие речи. Стандартами определена средняя экспертная оценка (MOS — mean opinion score), шкала которой имеет 5 градаций: 5 — качество превосходное, 4 — хорошее, 3 — посредственное, 2 — плохое, 1 — неудовлетворительное. Кодеки современных цифровых систем мобильной связи имеют MOS около 4.
Рассмотрим принципы
построения речевых кодеков. Подробно они изложены в [52]. Методы сжатия речевых
сообщений можно разделить на 2 группы: кодеры формы речевого сигнала и
вокодеры. Совместное использование этих методов характерно для так
называемых гибридных кодеров.
9.2.2. Кодеры формы речевого сигнала
Кодеры формы позволяют сохранить основную форму непрерывного сигнала. Они не являются специфичными для речи и могут применяться для сжатия любого непрерывного сигнала. Непрерывный сигнал источника кодируется в два этапа. Сначала с помощью аналого-цифрового преобразования (АЦП) формируются последовательности, дискретные по уровню и времени, т.е. производится так называемое натуральное кодирование. Затем используются собственно методы сжатия дискретных последовательностей.
На рис. 9.1 показано преобразование непрерывного сигнала в цифровую форму. В литературе эта операция часто именуется импульсно-кодовой модуляцией (ИКМ), хотя в реальности ни о какой модуляции несущей речь не идет.
В соответствии с теоремой Котельникова аналоговый сигнал x(t) заменяется своими непрерывными отсчетами х,(nd t), взятыми через интервал времени Л1 =1/Е~, где Р — частота дискретизации, в два раза превышающая верхнюю частоту F, спектра x(t) . Поскольку М известен и на приемной стороне, в обозначениях его можно опустить.
Далее диапазон изменения xД(n) разбивается на 2" дискретных уровней через интервалы Лх, называемые шагом квантования. Отсчет xД(n), удовлетворяющий условию з(п)Ах <х„(п) <[в(п)+11Лх, где s(n) — целое, принадлежащее

[
отрезку [-2" ",+2" "],
заменяется значением s(n)Ax. При этом возникает погрешность, максимальное
значение которой равно. Последовательность таких погрешностей называется
шумом квантования.
Результатом ИКМ аналогового сигнала x(t) является последовательность чисел s(1), Каждое s(i) представляется в двоичной системе счисления, для чего требуется k бит. На рис. 9.1 около каждого отсчета xД(n — i) указан номер уровня s(n — i) в десятичной системе счисления и eгo двоичный код на нижнем графике. Первый бит определяет знак отсчета, остальные — его значение (младшие разряды справа).
По каналу за время at передаются k бит со скоростью (9.1). На приемной стороне аналоговый сигнал восстанавливается с помощью цифро-аналогового преобразователя (ЦАП) и интерполятора (фильтра нижних частот).
Из-за шумов квантования и погрешностей интерполяции x(t) ~ x(t).
Для речевых сигналов числа s(i) являются зависимыми случайными величинами. Для сжатия таких последовательностей широко используется кодирование с предсказанием. На рис. 9.2 показана обобщенная схема такого кодирования.
Если известен (даже не очень точно) вид зависимости отсчетов друг от друга, то оценку текущего отсчета s(n) можно вычислить (предсказать) по т предыдущим отсчетам

s(n — т),s(n —
т+1),...,s(n — 1). При этом в канал разумно посылать только ошибку
предсказания e(n) = s(n) — s(n) . На приемной стороне с помощью такого же
предсказателя вычисляется прогноз s'(и) и восстанавливается сначала текущий
цифровой отсчет s'(и) =s'(n)+e(n), а затем (с помощью ЦАП) и аналоговый
х(1). Сжатие данных здесь достигается за счет того, что диапазон
изменения e(n) существенно меньше, чем диапазон изменения s(n).
Поэтому при той же точности представления требуется меньшее, чем при ИКМ,
число двоичных разрядов. Основной проблемой является разработка достаточно
просто реализуемых предсказателей, обеспечивающих минимальную
среднеквадратическую ошибку e(n).
Такое экономное кодирование называется дифференцональной ИКМ (ДИКМ). Так как зависимости между отсчетами s(i) на отдельных временных интервалах могут меняться, для уменьшения e(n) необходимо подстраивать коэффициенты предсказания а; Эти изменения должны передаваться на приемную сторону. В этом случае дифференциальную ИКМ называют адаптивной (АД И КМ).
Другой, полярный по отношению к ИКМ, метод кодирования называется
дельтамодуляцией (ДМ). Частота дискретизации Рд выбирается в десятки раз
больше верхней частоты F, спектра x(t). Ошибка предсказания
e(n) представляется 1 битом, указывающим только знак ошибки — s(n)Ax
больше или меньше xД(n) . ф Предсказанное значение получается из
предыдущего добавлением или вычитанием фиксированного значения
А (отсюда и название метода кодирования). В зависимости от скорости
изменения x(t) величину А можно оперативно
изменять, что соответствует адаптивной ДМ (АДМ). Говорят, что если при
ИКМ сигнал x(t) квантуется грубо по времени и точно по уровню, то при ДМ
— точно по времени и грубо по уровню.
Экспериментально установлено, что качество речи, восстановленной после ИКМ, остается высоким, если частота дискретизации Р = 8 кГц, а каждый отсчет s(n) представлен k = 8 битами. ИКМ с такими параметрами лежит в основе так называемой первичной ИКМ и формирует согласно (9.1) поток бит со скоростью Я, =64 кбит/с. Однако корреляция соседних отсчетов при этом превышает 0,85, что говорит о высокой избыточности полученной последовательности. Использование ДИКМ, АДИКМ позволяет снизить скорость преобразования примерно в 2 раза с сохранением высокого качества восстановленной речи.
В вокодерах (от английского voice code) измеряются пара- метры речевого аппарата человека, по которым на приемной стороне создается аналог такого же аппарата и синтезируется звук. При этом постулируется, что в течение 20...30 мс эти параметры остаются постоянными. Поэтому перед сжатием поток бит ИКМ нарезается на сегменты, содержащие по 160 — 240 отсчетов для оценки постоянных параметров.
Разработка вокодеров основана на использовании различных моделей голосового тракта. На рис. 9.3 показана однотрубная модель речеобразующего аппарата человека.
Модель представляет собой М последовательно соединенных секций одинаковой длины, имеющих постоянную (в пределах секции) площадь сечения. Если вдувать воздух в такой свисток (подавать сигнал возбуждения), то в зависимости от конфигурации соединения и сигнала возбуждения на выходе формируется

тот или иной звук. Таким образом, звук, получаемый с помощью данной модели, можно задать параметрами сигнала возбуждения и М значениями площадей секций свистка.
Важной характеристикой сигнала возбуждения является частота основного тона F,. Поток воздуха из легких человека прерывается голосовыми связками, и возникает последовательность импульсов с частотой следования от 80 до 1200 Гц. Значения периода основного тона 7, =1/Fp коррелированны в соседних сегментах речи. От точности описания основного тона зависит и степень сжатия, и качество синтезированной речи.
С помощью вокодеров получены большие коэффициенты сжатия, но синтезированная речь при этом характеризуется низким качеством из-за механической монотонности, отсутствия индивидуальной окраски.
Значительные успехи в сжатии речевых сигналов при приемлемом качестве достигнуты в результате совместного использования методов линейного предсказания и техники вокодеров. Выяснено, что площади секций модели на рис. 9.3 связаны нелинейными функциональными соотношениями с коэффициентами а, линейного предсказания (9.2). Схема речевого кодека в общем виде показана на рис. 9.4, где анализирующий и синтезирующий фильтры строятся на основе (9.2).
Алгоритмы сжатия, описываемые данной схемой, могут отличаться способом формирования сигнала возбуждения. Известны следующие разновидности сигнала возбуждения: возбуждение от основного тона, от ошибки предсказания e(n), многоимпульсное возбуждение и возбуждение от кода.

Самым простым является возбуждение от основного тона. В каждом периоде основного тона формируется один импульс для вокализованного сегмента (содержащего сигнал звука) и шумоподобный сигнал для невокализованного сегмента. На приемную сторону, следовательно, должен передаваться признак вокализованности анализируемого сегмента.
Возбуждение от ошибки предсказания приводит к металлическому оттенку синтезированной речи.
Многоимпульсное возбуждение обеспечивает лучшее качество воспроизведения и не требует классификации сегментов на вокализованные и невокализованные. Сигнал возбуждения определяется положением и амплитудами 8 — 13 импульсов в анализируемом интервале.
Так, в кодеке стандарта GSM в каждой четверти сегмента, содержащей по 40 отсчетов, формируются 3 регулярные последовательности из 13 импульсов разной амплитуды, отличающиеся сдвигом относительно начала подсегмента. В качестве сигнала возбуждения выбирается последовательность с наибольшей энергией. Параметры этой последовательности: амплитуды импульсов, номер выбранной последовательности кодируются и передаются на приемную сторону, где по ним синтезируется сигнал возбуждения для фильтра (9.2). Эти операции отображены в названии кодера — кодер с регулярным возбуждением, долговременным предсказанием и линейным предсказанием (RPEILTP — 1.PC — regular pulse excitationiiong term prediction — linear predictive code). Долговременное предсказание предназначено для устранения избыточности за счет корреляции периодов основного тона (фильтр с большой постоянной времени), а линейное предсказание — для учета корреляции соседних отсчетов (фильтр с малой постоянной времени). Скорость преобразования — 13 кбит/с, коэффициент сжатия относительно первичной ИКМ— примерно 5.
Для формирования сигнала возбуждения, обеспечивающего минимальную среднеквадратическую ошибку e(n), используется метод анализа через синтез, схема которого показана на рис. 9.5.
В кодер введен синтезатор речевого сигнала (декодер) точно такой же, как и на приемной стороне. С его помощью подбираются и передаются параметры оптимального сигнала возбуждения. В приемнике по этим параметрам восстанавливается речевой сигнал этим же синтезатором, что и обеспечивает минимальную ошибку, равную ошибке, допущенной при кодировании.

Наиболее эффективным методом сжатия речевого сигнала до скоростей 4 — 16 кбит/с считается алгоритм CELP (code excited linear prediction) — линейное предсказание и многоимпульсное возбуждение от кода (стандарты TETRA и IS-95). Сигнал возбуждения берется из заранее созданной кодовой книги, которая содержит от 2" до 2" векторов. Содержимое кодовой книги определяется в результате анализа достаточно длинных реальных речевых сигналов (детерминированная книга). В стохастическую (алгебраическую) книгу записываются коды отсчетов нормального белого шума с нулевым средним и единичной дисперсией.
Поиск оптимального вектора возбуждения требует проведения достаточно объемных вычислений. За 5 — 8 мс для каждого вектора надо определить ошибки предсказания, вычислить взвешенную среднеквадратическую ошибку и в качестве оптимального выбрать вектор, обеспечивающий минимальную ошибку. Номер (индекс) такого вектора передается по каналу. Для уменьшения числа операций вводятся дополнительные упрощенные книги.
В приемнике имеется точная копия кодовой книги, из которой по принятому индексу извлекается оптимальный вектор возбуждения и посылается в синтезатор, идентичный используемому в кодере. На рис. 9.6 приведена структурная схема декодера CELP стандарта TETRA, а в табл. 9.1 показано поразрядное распределение передаваемой информации при обработке 4 блоков сегмента в 30 мс.

Синтезирующий фильтр Ф1 реализует долговременное предсказание, а фильтр Ф2 — линейное 19.2). Из табл. 9.1 видна, ] что параметры оптимального сигнала возбуждения вычисляются в каждой четверти сегмента. Скорость преобразования 4,6 кбит/с, коэффициент сжатия — примерно 14.
Наличие пауз в процессе телефонного разговора позволяет организовать
прерывистую передачу речи (DTX — discontinuous transmission), при
которой передатчик МС включается только в периоды существования звука (в так
называемые периоды активности абонента). Как уже отмечалось, такие
периоды составляют в среднем около 25% времени сеанса связи. В паузах выделенный
для трафика физический канал может быть передан

другим абонентам или использован для передачи неречевых данных. В системах СОМА выключение МС не только экономит емкость ее аккумуляторов, но и снижает уровень внутрисистемных помех в обратном канале, что эквивалентно увеличению абонентской емкости системы (см. ~ 5.3.2).
Чтобы на приемной стороне во время выключения передатчика не возникали интервалы абсолютной тишины, и принимающий абонент не беспокоился об исправности телефонного тракта, генерируется так называемый комфортный шум. Создаваемый шум должен быть похож на натуральный фон передающей стороны (шум автомобиля, улицы). Для этого МС во время пауз периодически транслирует параметры естественного шума, которые учитываются при генерации комфортного шума.
Для организации прерывистой передачи речи требуется определять интервалы времени, в которых звук отсутствует. Эту задачу решают детекторы активности речи. В системе GSM работа детектора активности основана на различии спектральных характеристик речи и шума (предполагается, что спектр шума равномернее, чем спектр речи), а также на периодичности звука и непериодичности шума. Сигнал с выхода линейного предсказателя кодера фильтруется и сравнивается с адаптивным порогом, величина которого устанавливается в интервалы действия только шума. При превышении порога принимается решение о наличии гречи, в противном случае фиксируется ее отсутствие и передатчик МС выключается. Для уменьшения вероятности ложного выключения, что приведет к разрывам речи, решение об отсутствии звука выносится после накопления данных в течение 60...100 мс.
10. РАДИОИНТЕРФЕЙС МОБИЛЬНОГО ТЕЛЕФОНА GSM
10.1. Общая характеристика стандарта GSM
В
В
Основные этапы развития и совершенствования стандарта были кратко описаны в ~ 2.6.
В соответствии с Рекомендациями СЕРТ стандарт GSM 900 предусматривает работу в двух диапазонах частот: 890...915 МГЦ — прямой канал (с БС на МС), 935...960 МГц — обратный канал (с МС на БС) [6, 53]. Разнос по частоте прямого и обратного канала (дуплексный разнос) составляет 45 МГц.
Разнос частот между соседними каналами составляет 200 кГц. Таким образом, в отведенной для приема (передачи) полосе частот шириной 25 МГц размещаются 124 канала связи.
В стандарте GSM 1800 предусматривается работа 8 диапазонах 1710...1785 МГц (БС), и 1805...1880 МГц (МС), что при том же разносе частот между соседними каналами позволяет разместить 374 канала.
В стандарте GSM используется многостанционный доступ с временным разделением. Это позволяет на одном частотною канале разместить 8 физических каналов.
Обработка речи осуществляется на основе системы прерывистой передачи речи DTX, которая обеспечивает включение передатчика только во время разговора. Для преобразования речевых сигналов используется речевой кодек RPE/LTP — LPC (см. л. 9) с регулярным импульсным возбуждением и скоростью преобразования речи 13 кбит/с.
Для защиты от ошибок, возникающих в радиоканалах, применяется блочное и Сверточные кодирование с перемежением. Повышение эффективности кодирования и перемежения достигается медленным переключением рабочих частот в процессе сеанса связи (217 скачков в секунду).
Для борьбы с замираниями сигналов, вызванных многолучевым распространением радиоволн, используются эквалайзеры, обеспечивающие выравнивание импульсных сигналов со среднеквадратическим отклонением времени задержки до 16 мкс.
Система синхронизации
рассчитана на компенсацию абсолютного времени задержки сигналов до 233 мкс, что
соответствует дальности связи (максимальному радиусу соты)
Для модуляции радиосигнала используется спектрально эффективная гауссовская частотная манипуляция с минимальным частотным сдвигом (GMSK).
Основные характеристики стандарта GSM сведены в таблицу (в скобках приведены данные стандарта GSM 1800).

10.2. Структура и
общий алгоритм функционирования
Схема, иллюстрирующая функциональное построение ССМС стандарта GSM, была представлена в гл. 2 (см. рис. 2.4). Там же было разъяснено назначение основных элементов системы и характер их взаимодействия.
По этой причине здесь целесообразно рассмотреть только особенности, присущие стандарту GSM.
Для контроля легальности использования каждая мобильная станция имеет уникальный международный идентификатор мобильного оборудования (IMEI — International mobile station equipment identity). Кроме того, каждый абонент получает стандартный сменный модуль подлинности абонента (SIM-карту— subscriber identity module), который содержит международный идентификационный номер (IMSI — International mobile station sub- scriberidentity), персональный идентификационный номер (PIN— personal identification number), персональный код разблокировки (PUK — personal unblocking key), индивидуальный ключ (К) и алгоритм (A3) аутентификации и другую информацию (в частности, SIM-карта может хранить данные, как электронная записная книжка). С помощью этой информации осуществляется полный цикл аутентификации и разрешается доступ абонента к сети (см. ~ 8.2.2).
Идентификаторы IMEI и IMSI не связаны друг с другом. Это позволяет использовать различные SIM-карты (например, зарегистрированные в различных сетях) с одним мобильным терминалом или одну SIM-карту на различных мобильных терминалах.
По выходной мощности МС делятся на 5 классов: 20 (класс 1), 8, 5, 2 и 0,8 (класс 5) Вт. Для мобильных телефонов типичным значением максимальной мощности является 2 Вт (класс 4).
В стандарте GSM предусмотрено управление мощностью излучения МС (см. g 6.1). Минимальный уровень излучения МС 20 мВт. МС оценивает качество принимаемого сигнала (по частоте битовых ошибок) и передает соответствующую информацию КБС, который принимает решение о регулировке уровня выходной мощности. Шаг регулировки мощности составляет 2 дБ.
10.3. Архитектура радиоинтерфейса. Логические и физические
каналы
Как уже сказано, исходный стандарт GSM предусматривает работу в двух диапазонах частот — 890... 915 МГц для передатчиков МС и 935...960 МГц для передатчиков БС. В стандарте используется узкополосный (ширина полосы канала связи 200 кГц) многостанционный доступ, сочетающий частотное РОМА и временное ТОМА разделение каналов. В рамках частотного разделения стандарт с учетом защитных полос содержит 124 дуплексных канала с разносом частот приема и передачи в 45 МГц. Центральная частота канала (в МГц) связана с его номером соотношениями:
• обратный канал (uplink) — f0 = 890,200+ 0,200 i, 1 < i < 124;
•
прямой канал (downlink) — f0
=935,200+0,200 i,1<i <124.
В рамках временного разделения передача информации по каналу связи осуществляется в течение одного из 8 временных интервалов (слотов) длительностью 577 мкс на каждой из 124 несущих.
Организационно 8 слотов объединяются в кадры длительностью 4,615 мс, которые в свою очередь последовательно группируются в мультикадры, суперкадры и гиперкадры [54, 55]. Длительность последнего определяет период последовательности кадров во временной структуре стандарта GSM. Номер кадра в пределах гиперкадры используется как входной параметр при криптографической защите передаваемых данных. Общая структура кадров и количественные соотношения между ее элементами представлены на рис. 10.1.
Каждые 4,615 мс (т.е. для каждого кадра) несущая частота меняется по псевдослучайному закону (с сохранением дуплексного разноса 45 МГц). Всем активным абонентам, находящимся в одной соте, в процессе установления канала назначается единая частотно-временная матрица. Ортогональность последовательностей переключения частот для активных абонентов соты, работающих в одном слоте, обеспечивается различным начальным частотным сдвигом. В смежных сотах используются различные формирующие последовательности [6].
Цифровой информационный поток представляет собой последовательность пакетов, размещаемых в соответствующих

временных интервалах (слотах). Пакеты формируются немного короче, чем слоты, их длительность составляет 0,546 мс, что необходимо для надежного приема сообщения при наличии дисперсии в канале. Информационное сообщение передается по радиоканалу со скоростью 270,833 кбит/с (слот содержит 156,25 бит, длительность одного бита 3,69 мкс).
По каналу связи передается либо информация сигнализации, либо кодированная речь или данные, поэтому в физическою канале могут быть реализованы либо логические каналы трафика, либо каналы управления, причем каждый из них может существовать в нескольких вариантах.
На рис. 10.2 показана классификация логических каналов стандарта GSM. Стрелки обозначают направление передачи: вниз — передача от БС к MC или передача сверху вниз (прямой канал), вверх — передача от МС к БС, снизу вверх (обратный канал), двунаправленная стрелка — передача в обоих направлениях. В стандарте GSM определены следующие типы логических
каналов [6, 13, 56]:

Пользовательские каналы (Т), или каналы трафика (traffic channels, TCH) являются двусторонними. При передаче речи обеспечивают скорость 22,8 кбит/с или 11,4 кбит/с. Эти каналы используются и для передачи данных со скоростями от 2,4 кбит/с до 9,6 кбит/с. Определены следующие типы каналов трафика:
• TCH/FS (traffic channels / full speech) — полноскоростные каналы трафика речи, образуемые последовательностью слотов с одинаковыми номерами в пределах кадра;
• TCH/HS (traffic channels / half speech) — полускоростные каналы трафика речи, формируемые последовательностью слотов с одинаковыми номерами четных или нечетных кадров;
• TCH/F9.6, ТСН/F4.8 — полноскоростные каналы трафика данных со скоростью 9,6 кбит/с и 4,8 кбит/с соответственно и др.
Каналы управления (control channels) обеспечивают пере- дачу сигналов управления и синхронизации. Различают несколько типов каналов управления:
1. BCCH (broadcast control channels) — вещательные каналы управления (каналы обеспечения радиообмена). Предназначены для передачи сигналов управления в направлении от базовой станции к подвижной в вещательном режиме, т.е. без конкретной
адресации, и обеспечивают настройку МС для работы с сетью. В состав логических каналов этого типа входят:
• FCCH (frequency correction channel — канал F подстройки частоты), обеспечивающий подстройку частоты несущей в MC;
• SCH (synchronization channel — канал S синхронизации), предназначенный для цикловой синхронизации MC в процедуре доступа и для передачи идентификатора БС, обслуживающей данную зону;
• ВССН (канал управления передачей) — контрольный канал В, используемый для передачи информации о зоне обслуживания (идентификатора зоны обслуживания LAI — location агеа identity, периода регистрации).
2. СССР (common control channels) — общие каналы управления:
• РСН (paging channel — канал вызова подвижной станции, или канал поиска С) — однонаправленный канал от БС к МС, используемый для организации входящего вызова к МС;
• AGCH (access grant channel — канал разрешения доступа 0) направлен только от БС к МС и информирует МС о выделенном канале сигнализации);
• RACH (random access channel — канал случайно (о доступа R) предназначен для передачи от МС к БС запроса о номере временного интервала сигнализации при доступе ее к сети.
3. SDCCH (stand-alone dedicated control channels) — индивидуальные каналы управления, используемые в двух направлениях для связи между базовой и мобильной станциями.
Различают два вида таких каналов: SDCCH/4 и SDCCH/8— индивидуальные каналы управления О, состоящие из 4 и 8 подканалов соответственно. Эти каналы предназначены для сигнализации в процессе установления соединения, например, для передачи результатов аутентификации и регистрации. По ним обеспечивается запрос подвижной станции о требуемом виде обслуживания, контроль правильного ответа БС и выделение свободного канала связи, если это возможно.
4. АССА (associated control channels) — совмещенные каналы управления, которые также используются в двух направлениях. По направлению "вниз" передаются команды управления с БС, по направлению "вверх" — информация о статусе МС. Различают два вида таких каналов:
• SACCH (slow АССА — медленный совмещенный канал управления — канал А). По этому каналу БС передает команды для установки уровня мощности передатчика МС, которая посылает данные об уровне установленной выходной мощности, измеренном приемником уровне радиосигнала и его качестве;
• FACCH (fast АССН — быстрый совмещенный канал управления — канал А) служит для организации "эстафетной передачи".
Совмещенные каналы управления всегда объединяются с каналами связи (трафика) или индивидуальными каналами управления. Различают 6 видов объединенных каналов управления:
• FACCH/F = FACCH + ТСН/F;
• FACCH/Н = FACCH + ТСН/Н;
• SACCH/TF = $АССН + ТСН/F;
• SACCH/ТН = SACCH + ТСН/Н;
• SACCH/С4 = SACCH + SDCCH/4;
• SACCH/С8 = $АССН + SDCCH/8.
Двунаправленный канал трафика Т реализуется при частотном разделении физических каналов, связывающих БС с МС и МС с БС. В стандарте GSM прямые каналы используют диапазон 935...960 МГц, обратные — диапазон 890...915 МГц. Разнос по частоте прямого и обратного канала составляет 45 МГц. В каждом радиоканале имеется 8 временных интервалов, предназначенных для передачи информации от независимых источников. Таким образом, физический канал трафика задается указанием частотного поддиапазона радиоканала и номера временного интервала, используемого для передачи как вниз, так и вверх.
Однако МС следует дать время для обработки принятых сообщений и выполнения полученных команд управления. Поэтому временные циклы прямого и обратного каналов сдвинуты на 3 интервала, как это показано на рис. 10.3. Стрелками отмечены моменты передачи информации двухстороннего канала Т, размещенного во 2-м временном интервале. Комбинация, посланная БС во 2-м интервале, будет принята МС в 7-м, а пакет, переданный МС во 2-м дискретен, принят БС в 5-м.
Рассмотрим более подробно структуру кадров (слотов) передачи данных. По структуре и информационному содержанию можно выделить 5 типов слотов [6, 13]:
• normal burst (NB) — нормальный временной интервал;

•
frequency correction burst (FB) — интервал подстройки частоты;
• synchronization burst (SB) — интервал временной синхронизации;
• dummy burst (DB) — установочный интервал;
• access burst (АВ) — интервал доступа,
схематичное изображение которых представлено на рис. 10.4. Сокращения, использованные при обозначении полей слотов, имеют следующее содержание:
• ТВ (tail bits) — запретный бланк (хвостовые биты);
• ED (encrypted data) — закодированная информация;
• SF (stealing flag) — скрытый флажок;
• TS (training sequence) — обучающая последовательность;
• GP (guard period) — защитный интервал;
• ETS (extended training sequence) — расширенная обучающая последовательность;
• ЕТ (extended tail) — расширенный защитный бланк.
Слоты типа NB используются для передачи информации по каналам трафика и управления (за исключением канала доступа RACH). На данном временном интервале содержится 114 бит за- шифрованного сообщения, разбитого на два подблока по 57 бит, обучающая последовательность в 26 бит, разделяющая указанные информационные подблоки, два защитных бланка по 3 бита, защитный интервал в 8,25 бит и 2 скрытых флажка по 1 биту, которые служат признаком передаваемой информации — трафика или сигнализации. Обучающая последовательность используется для решения следующих задач:

• оценка качества связи на основе сравнения принятой и эталонной последовательностей (определение частоты появления ошибок в двоичных разрядах "битовых ошибок");
• оценка импульсной характеристики радиоканала и настройка адаптивного эквалайзера для последующей коррекции тракта приема сигнала;
• определение задержки распространения сигнала между БС и МС для оценки дальности радиосвязи.
Слоты FB предназначены для синхронизации по частоте подвижной станции. В этом временном интервале 142 бита являются нулевыми, что соответствует передаче немодулированной несущей со сдвигом на 1625/24 кГц выше ее номинального значения. Повторяющиеся временные интервалы FB образуют канал установки частоты FCCH.
Слоты типа SB используются для кадровой синхронизации, т.е. для синхронизации во времени базовой и подвижной станций. Каждый из них содержит 64 бита расширенной синхро последовательности, а также информацию о номере кадра и идентификационный номер БС. Слоты SB всегда передаются в паре с FB и образуют канал синхронизации (SCH).
Слоты DB обеспечивают установление и тестирование канала связи. По своей структуре DB совпадает с NB и содержит установочную последовательность длиной 26 бит. Контрольные биты отсутствуют, и не передается никакой информации, а только устанавливается факт работы передатчика.
Слоты АВ предназначаются для организации доступа подвижной станции к новой БС. Структура этих слотов значительно отличается от ранее рассмотренной. Специфичность ее объясняется тем, что слоты АВ определяют интервал, на котором подвижная станция впервые пытается установить связь с базовой. Поскольку время прохождения сигнала неизвестно, первая позиция слота отводится полю, являющемуся концевым у остальных типов. Расширенный защитный интервал в 68,25 бит, равный двойному значению наибольшей возможной задержки сигнала в соте, обеспечивает достаточное разнесение от сигналов других подвижных станций. Обучающая последовательность (41 бит) позволяет БС правильно принять последующие 36 бит информации от МС.
В каналах трафика ТСН и совмещенных каналах управления FACCH и SACCH используется 26-кадровый мультикадр (рис. 10.5). В полноскоростном канале (ТСН/FS) в каждом 13-м кадре передается пакет информации канала SACCH, каждый 26-й кадр свободен. В полускоростном (TCH/HS) канале связи информация канала SACCH передается в каждом 13-м и 26-м кадрах мультикадра. Скорость передачи информационных сообщений составляет 22,8 кбит/с (24 кадра по 114 бит за 120 мс) для полноскоростного канала или по 11,4 кбит/с на каждый из двух полускоростных каналов. Полная скорость передачи в объединенном канале ТСН/SACCH составляет 24,7 кбит/с.

Быстрый совмещенный канал управления FACCH передается половиной информационных бит временного интервала ТОМА кадра в канале ТСН, с которым он совмещается в восьми последовательных кадрах.
Для передачи каналов управления (кроме FACCH и SACCH) используется 51-кадровый мультикадр. На рис. 10.6 показана структура мультикадра при передаче объединенного канала ВССН/СССН в направлении "вниз". В этом канале передаются:
• общая информация о сети (соте), в которой находится подвижная станция, и о смежных сотах (канал ВССН);
• информация о временной (цикловой) синхронизации и опознавании приемопередатчика базовой станции (канал $СН);
• информация для синхронизации несущей (канал FCH);
• разрешение доступа подвижной станции (канал AGCH);
• вызов подвижной станции (канал PCH), если инициатором вызова является сеть.
По сигналам канала ВССН МС измеряет уровень сигнала БС рабочей ("своей") соты и до 16 смежных сот, а также код качества принимаемого сигнала в рабочей соте.
Канал BCCH/СССН "вверх" используется только для передачи сигналов параллельного доступа RACH, который является единственным каналом управления от подвижной станции к сети. При этом подвижная станция может использовать для осуществления доступа к сети нулевой интервал в любом из кадров.
Полная скорость передачи для канала ВССН, а также для канала AGCH/РСН составляет 1,94 кбит/с (4 раза по 114 бит за 235 мс).
Существуют и другие структуры, которые могут использоваться в 51-кадровом мультикадре. Эти структуры называют "переменными", так как они зависят от нагрузки в сети.

В стандарте GSM строго определены временные и спектральные характеристики излучаемых сигналов. Различные формы огибающих излучаемых сигналов соответствуют разным длительностям интервала АВ (88 бит) по отношению к другим интервалам ТОМА-кадра (148 бит). Временные маски огибающих и нормы на спектральную характеристику приведены, например, в [6, 54].
Как упоминалось, в стандарте GSM применяется спектрально-эффективная гауссовская частотная манипуляция GMSK (см. ~ 4.2). При этом методе несущая частота дискретно, через интервалы времени, кратные периоду Т> битовой модулирующей последовательности, принимают одно из двух значений:
Свое название "гауссовская" манипуляция получила из-за того, что последовательность информационных бит перед модулятором проходит через фильтр нижних частот (ФНЧ) с гауссовской АЧХ. За счет этого закон изменения фазы в течение посылки повторяет ход гауссовский интегральной функции распределения, чем обеспечивается плавность изменения частоты и высокая степень компактности спектра. В стандарте GSM применяется GMSK-модуляция с величиной нормированной полосы ВТ = 0,3, где В — ширина полосы фильтра по уровню — 3 дБ.
10.4. Взаимодействие радиоинтерфейс с сетью GSM
Обслуживание абонента и функционирование всей системы реализуется через ряд процедур. Поясним в упрощенном виде некоторые из них.
10.4.1. Подключение МС (первая регистрация)
При включении питания приемник МС, перестраиваясь по частоте, ищет сигнал с максимальным уровнем (используется логический контрольный канал В).
После выбора частотного радиоканала МС осуществляет подстройку частоты и кадровую синхронизацию (логические каналы F и S). По известному формату общего сигнала МС может определить характер служебной информации в следующих циклах доступа.
Однако сеть не знает о появлении новой активной МС. Для первой регистрации МС используется логический канал доступа R, общий для всех МС данной зоны. Поэтому возможны конфликтные ситуации в случаях, когда несколько МС будут одно- временно пытаться связаться с БС по этому каналу. Для разрешения конфликта используется алгоритм асинхронного случайного множественного доступа типа ALOHA [38, 57].
Сигнал доступа содержит идентификатор данной МС (IMSI), по которому сеть узнает о появлении новой МС.
Для исключения несанкционированного использования ресурсов сети необходимо проверить подлинность абонента (точнее, SIM-карты). С этой целью проводятся процедуры аутентификации и идентификации, детали которых обсуждались в Я 8.2.2.
В случае положительного итога аутентификации и идентификации данная МС отмечается как активная, запоминается код 30Hbl ее местонахождения. В BPM ей присваивается временный идентификатор TMSI, который передается на МС как подтверждение состоявшейся регистрации (логический канал разрешения доступа 0).
При негативном результате процедур аутентификации и идентификации дальнейшие действия определяются администрацией сети, которая, например, может санкционировать повторную попытку регистрации.
Таким образом, в результате проведения процедуры подключения сети известно, что МС с номером IMSI активна и находится в зоне LAI, обслуживаемой соответствующей БС. В памяти MC хранится тот же LAI. Для выполнения подключения потребовались логические каналы контроля, подстройки частоты, синхронизации, доступа и разрешения доступа.
При переходе в пассивное состояние МС посылает сообщение об отключении, чтобы сеть не искала ее при входящем вызове. Возможно, что из-за помех в радиоканале это сообщение не дойдет до КБС, и сеть ошибочно будет считать эту МС активной. Подтверждение о получении сигнала об отключении БС не может поспать МС, так как последняя может быть уже обесточена.
Для разрешения этой ситуации используется процедура периодической регистрации. В активном состоянии МС через установленное время (например, 10...15 мин.) обязана проводить регистрацию, подобную первой при подключении. Если МС не подтверждает свою работоспособность в течение определенного промежутка времени, она считается отключенной, что и отмечается опусканием флагов в ВРМ и ДРМ против идентификаторов соответственно TMSI и IMSI.
Входящий вызов (см. рис. 10.7) поступает на коммутатор через межсетевой
коммутационный центр подвижной связи МКЦМС (GMSC — gateway mobile Service
switching center), в котором определяется идентификационный номер (IMSI)
вызываемого мобильного абонента и проверяется соответствие записи в ДРМ
(2) и ВРМ (3). Данные возвращаются в МКЦМС (4), после чего ответственность за
соединение передается тому ЦКМС, в чьей зоне обслуживания предполагается текущее
нахождение вызываемой МС (5). Статус этой МС запрашивается в ВРМ (6).

Если ВРМ подтверждает (7) досягаемость вызываемой МС, то вызов направляется (8) соответствующим подсистемам БС (ПБС). Вещательный адрес передается всеми БС, для чего используется логический канал поиска С. Мобильная станция в свободном состоянии непрерывно контролирует этот канал. Если МС отвечает на вызов какой-либо БС (9), то проводится процедура идентификации и аутентификации (10). В случае их успешного завершения ВРМ передает ЦКМС (11), что соединение может быть установлено (12).
Пусть МС активна и свободна. Абонент, желающий связаться с другим пользователем, должен набрать весь номер вызываемого абонента и только после этого начать процесс установления соединения. Это позволяет устранить ошибки в наборе номера (20% отказов в предоставлении нужного соединения) и сократить время на передачу цифр в КБС.
По команде "Вызов" МС, используя логический канал доступа, передает сообщение КБС на установление соединения. КБС проверяет категорию абонента (класс обслуживания), отмечает его как занятый и посылает МС по каналу D подтверждение, что запрос доступа принят. Теперь МС может передавать цифры номера вызываемого абонента в КБС, который запускает ранее рассмотренную процедуру поиска. Подтверждение установления соединения и указание о переходе на двухсторонний пользовательский канал передаются МС после ответа вызываемой МС.
10.4.5. Роуминг и обновление данных
местонахождения
Пусть МС подключена, свободна и перемещается. При этом она прослушивает каналы контроля. В (для установления зоны местонахождения) и поиска С (для обнаружения возможного входящего вызова). По уровню контрольного сигнала определяется момент пересечения границы зон обслуживания. Пусть МС из зоны обслуживания с идентификатором LAI переместилась в зону с LAI. Выбрав контрольный канал с максимальным уровнем сигнала, МС обнаруживает, что передаваемый по этому каналу идентификатор не совпадает с записанным в ее памяти LAI.
Следует срочно информировать сеть о смене зоны местонахождения, т.е. выполнить процедуру вынужденной регистрации.
Для этого используется канал доступа, по которому МС передает запрос на обновление данных. Далее процесс обмена сигналами во многом напоминает процесс при первой регистрации. По окончании этой процедуры в ДРМ идентификатору IMSI данной МС сопоставлен LAIC, известен номер КБС, который обслуживает новую зону, в ВРМ ЦКМС записан временный идентификатор TMSI рассматриваемой МС. В памяти МС хранится новый LAIC.
Ясно, что при движении МС вдоль границы зон с разными идентификаторами может возникнуть эффект пинглонга, когда придется часто выполнять процедуру вынужденной регистрации. В ЦКМС резко возрастают объемы данных, передаваемых между ДРМ, ВРМ, КБС.
Передача обслуживания (handover или handoff) является неотъемлемой функцией сотовой сети, предназначенной для обеспечения мобильных абонентов непрерывной связью.
В системе GSM применяется 4 типа передачи обслуживания:
• между каналами в одной и той же ячейке (соте), обслуживаемой одной БС;
• между смежными БС, находящимися под управлением одного и того же КБС;
• между БС, находящимися под управлением различных КБС, но принадлежащими одному ЦКМС;
• между БС, находящимися под управлением различных ЦКМС.
Первые два типа передачи обслуживания (внутренние) используют только один КБС, а ЦКМС лишь уведомляют о завершении передачи обслуживания; последние два, называемые внешними, совершаются под управлением вовлеченных в процедуру ЦКМС.
Инициаторами передачи обслуживания могут стать и МС, и ЦКМС (для оптимизации нагрузки на сеть). Основная информация для принятия решения о передаче обслуживания поставляется МС.
МС постоянно оценивает качество принимаемых от нескольких (до 16) БС сигналов канала ВССН и формирует список шести наилучших кандидатов на передачу обслуживания. Эта информация передается БС и ЦКМС, по крайней мере, один раз в секунду и используется алгоритмом передачи обслуживания.
Для передачи результатов измерений от МС на БС предусмотрены логические каналы А и А, которые нужны только в течение сеанса связи. Для экономии физических каналов данные об условиях приема передаются в канале обмена за счет прерывания пользовательской информации. Некоторые кадры абонента отбрасываются и заменяются результатами измерений уровней принимаемых сигналов. На приемной стороне в пропущенные места вставляются, например, предыдущие кадры данных абонента. Поэтому скорость передачи по логическим каналам А не лжет быть сделана очень большой, чтобы сохранить требуемое качество пользовательского канала. Однако в условиях упоминавшегося эффекта пинглонга требуется часто принимать решение о смене пользовательского канала.
Пусть МС занята, т.е. обменивается информацией с другим абонентом, и перемещается из зоны обслуживания с LAI в зону с LAI>. На границе зон возникает необходимость смены частотного радиоканала и выбора временного интервала без разрушения соединения, ранее установленного для обмена информацией между двумя абонентами.
Принятие решения о переключении вызова осуществляется сетью на основании как собственных измерений принимаемых сигналов, так и данных об условиях приема, передаваемых МС. Если уровни сигналов у БС и у МС одновременно не превышают некоторого порогового значения, выносится решение о переключении вызова, т.е. о смене пользовательского канала.
После принятия решения о переключении вызова КБС определяет новый двухсторонний пользовательский канал, а соответствующая МС получает указание о переходе на новый канал. Старый тракт при этом разрушается. По окончании сеанса связи МС должна получить доступ к сети и сделать запрос на обновление данных местонахождения, поскольку за время сеанса она могла переместиться в зону обслуживания с другим LAI.
11. РАДИОИНТЕРФЕЙС СИСТЕМЫ
cdmaOne (IS-95)
11.1. Общая характеристика системы
С опорой на преимущества, предоставляемые технологией СОМА (см. ~ 5.3.1), компанией Qualcomm (США) была разработана ССМС общего пользования с кодовым разделением каналов. При этом основными стимулами явились увеличение абонентской емкости по сравнению с действующими ССМС, основанными традиционном частотно-временном доступе, улучшение качества обслуживания и повышение информационной безопасности. Технические требования к системе сформулированы в ряде стандартов Ассоциации Промышленности связи (Telecommunications lndustry Association — TIA), определяющих характер и порядок взаимодействия различных функциональных узлов ССМС и условия совместимости аппаратуры различных фирм- производителей. К числу основных стандартов рассматриваемой ССМС относятся [6]:
IS-95 — эфирный интерфейс (радиоинтерфейс);
IS-96 — интерфейс речевых служб;
IS-97 — интерфейс мобильной станции;
IS-98 — интерфейс базовой станции;
IS-99 — интерфейс службы передачи данных.
Учитывая особую значимость радиоинтерфейса, рассматриваемую систему
называют ССМС стандарта IS-95, либо, принимая во внимание технологию организации
MHO>KBCTBBHHOIO доступа, системой cdmaOne.
Система IS-95 рассчитана на работу в диапазоне частот 800 МГц, причем для прямого канала (линия "вниз") выделен участок спектра 869,04... 893,97 МГц, а для обратного (линия "вверх") — 824,04...848,96 МГц. Ширина полосы канала связи составляет 1,25 МГц, поэтому при развертывании ССМС IS-95 операторы могут осуществлять частотное планирование, исходя из указанных полос. Однако согласно решению Федеральной Комиссии связи США, одному оператору может быть выделен максимальный диапазон частот, равный 12,5 МГц как в прямом (от БС к МС), так и в обратном (от МС к БС) направлениях, что соответствует 10 физическим частотным радиоканалам с полосой в 1,25 МГц.
Как указывалось в 5.3.1, технология организации множественного доступа с кодовым разделением каналов основана на применении сложных (spread spectrum) сигналов, полоса которых значительно превышает ширину спектра информационного сообщения. В системе IS-95 реализовано прямое расширение спектра (DSSS) с использованием функций Уолша длины 64 и двух типов псевдослучайных последовательностей (ПСП): короткой и длинной. Линия "вниз" организована на основе синхронного варианта СОМА, использующего для разделения физических абонентских каналов ансамбль сигнатур в виде функций Уолша. Асинхронный режим СОМА в обратном канале осуществлен приписыванием различным абонентам одной соты специфических сдвигов длинной ПСП (о подходах к выбору сигнатурных последовательностей см. 5.3.3).
Как неоднократно отмечалось (см. Я 5.3.1, 6.1), выравнивание мощностей сигналов МС на входе приемника БС является непременным условием работоспособности линии "вверх" системы СDМА. В стандарте IS-95 применена быстродействующая петля автоматической регулировки мощности сигналов МС, принцип действия которой описан в ~ 6.1. Регулировка осуществляется в динамическом диапазоне 84 дБ с шагом +0,5 дБ и с периодичностью от нескольких микросекунд до 1,25 мс. Резерв фактора речевой активности (см. g 5.3) также утилизирован в системе посредством использования речепреобразующего устройства (вокодера) с переменной частотой преобразования аналогового речевого сигнала в цифровой (g 9.2.3). В зависимости от активности абонента вокодер формирует потоки данных со скоростями 8,6; 4; 2 и 0,8 кбит/с [33, 58, 59].
Требуемое качество передачи данных в системе достигается с помощью довольно мощного канального кодирования, выполняемого в несколько этапов (см. рис. 7.1). На первом, предварительном этапе цифровой речевой сигнал с выхода вокодера, структурированный в кадры длительностью в 20 мс, кодируется блоковым циклическим кодом (CRC, см. ~ 7.1) для формирования индикатора качества кадра и дополняется "хвостом", необходимым для последующего сверточного кодирования. Введение подобной избыточности увеличивает фактические скорости данных, заменяя первоначальный их набор на 9,6; 4,8; 2,4 и 1,2 кбит/с. Следующим этапом является сверточное кодирование. В прямом
канале используется код с длиной кодового ограничения 9 и скоростью 1/2, тогда как код в обратном канале, обладающем меньшей помехоустойчивостью (мощность передатчика МС весьма мала), имеет вдвое большую избыточность, т.е. скорость 1/3 при той же длине кодового ограничения. Наконец, на третьем этапе выполняется перемежение информационного потока в кадре для нейтрализации эффекта пакетирования ошибок (см. 7.3).
Помимо перемежения, для борьбы с быстрыми замираниями в системе использовано и многолучевое разнесение, т.е. приемники на основе алгоритма RAKE (см. 6.2.2). Для этого на БС используется минимум четыре, а на МС — три параллельно работающих коррелятора. Помимо этих корреляторов, настраиваемых на определенную задержку, в каждом приемнике имеется еще и сканирующий по задержке канал, позволяющий осуществлять настройку RAKE-каналов на сигналы с наибольшей интенсивностью.
Наличие нескольких параллельных каналов корреляционной обработки позволяет осуществить мягкую эстафетную передачу, (soft handoff или soft handover) при переходе МС из одной соты в другую. В процессе мягкой эстафетной передачи МС может поддерживать соединение с двумя и более БС, выбирая сигнал с большей интенсивностью (см. ~ 6.2.1). Указанная процедура позволяет поддерживать высокое качество связи при переключении МС с одной БС на другую и делает эстафетную передачу практически незаметной для пользователя.
Стандарт IS-95 обеспечивает высокую степень безопасности передаваемых данных за счет их скремблирования (см. ~ 8.1.1) выборками из вышеупомянутой длинной псевдослучайной последовательности. Ключ (маска) скремблирования индивидуален для каждой МС и формируется по секретному правилу на базе ее идентификационного номера.
Основные характеристики стандарта IS-95 и технические параметры приемо-передающего оборудования представлены в табл. 11.1 [6, 60].
Для систем с СОМА и, в частности, для ССМС IS-95 характерна определенная асимметрия линий "вниз" и "вверх": в первой из них (от БС) все абонентские сигналы передаются из одной пространственной точки и потому могут быть легко синхронизированы (синхронный вариант СОМА). В направлении же от БС к МС приходится применять асинхронное кодовое разделение
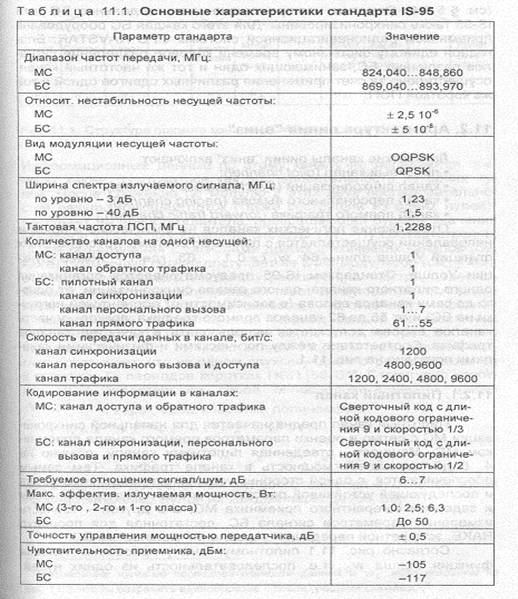
(см. 5.3.1). Отметим, что временные шкалы отдельных БС сети IS-95 также синхронизированы. Для этого каждая БС оборудована приемником радионавигационной системы GPS NAVSTAR. Благодаря единому системному времени кодовое разделение сигналов различных БС, занимающих один и тот же частотный канал, осуществлено за счет применения различных сдвигов одной и той же короткой ПСП.
11.2. Архитектура линии "вниз"
Логические каналы линии "вниз" включают:
• пилотный канал (pilot channel);
• канал синхронизации (synchronization channel);
• канал персонального вызова (paging channel);
• канал прямого трафика (forward traffic channel). Отображение логических каналов на физические в прямом
направлении осуществляется с помощью системы ортогональных функций Уолша длины 64: w/=0,1,...,63, где i — номер функции Уолша. Стандартом IS-95 предусматривается организация одного пилотного канала, одного канала синхронизации, от одного до семи каналов вызова (в зависимости от абонентской нагрузки на БС) и от 55 до 62 каналов прямого трафика, поскольку часть каналов вызова допускается использовать в качестве каналов трафика. Соответствие между логическими и физическими каналами показано на рис. 11.1.
Пилотный канал предназначается для начальной синхронизации МС с сетью и оценки параметров прямого канала приемником МС. Мощность, отведенная пилотному каналу, обычно на 4...6 дБ превышает мощность в канале трафика. Тем самым обеспечиваются, с одной стороны, условия для надежного ввода и последующей устойчивой работы петель автоподстройки фазы и задержки когерентного приемника МС, а с другой — точность измерений параметров сигнала БС, достаточная для процедур RAKE, эстафетной передачи и управления мощностью БС.
Согласно рис. 11.1 пилотному каналу присвоена нулевая функция Уолша w,, т.е. последовательность из одних нулей.
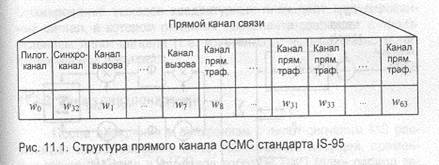
Информационные данные по этому каналу не передаются, т.е. могут также трактоваться как последовательность из одних ну- лей. После сложения по модулю 2 этих двух последовательностей результирующий поток (также состоящий из одних нулей)
поступает на преобразователь, превращающий булевы значения символов (0,1) в двуполярные отсчеты (+1, — 1) соответственно. После объединения с сигналами других физических каналов (см. ниже) суммарный сигнал поступает на КФМ- модулятор (см. ~ 4.2), в котором подвергается прямому расширению спектра, перемножаясь с двумя псевдослучайными скремблирующими последовательностями ПСП — ~ и ПСП — О (символы I и Q отвечают синфазной и квадратурной составляющим). Период каждой из названных ПСП содержит 215 чипов, частота следования которых согласно стандарту (см. табл. 11.1) составляет 1,2288 Мчип/с. Прямой подсчет показывает, что на одном двухсекундном отрезке умещается в точности 75 периодов коротких ПСП [58-61]. Структурно короткие ПСП представляют собой М-последовательности длины
с характеристическими полиномами
fI=x15+x13+x9+х8 +х7 +х5 +1
и
fQ=х15+х12+х11+х10+х6 +х5 +х4 +х3+1
расширенные добавлением нулевого символа к цепочке из 14 последовательных нулей на каждом периоде [58, 59].

Как можно видеть, фактически в пилотном канале передается только пара ПСП — ! и ПСП — О или, что эквивалентно, комплексная ПСП. Данная комплексная короткая ПСП одинакова для всех 64 СОМА — каналов и используется всеми БС системы, но с разными циклическими сдвигами. Разница в циклических сдвигах позволяет МС разделять сигналы, излучаемые БС разных сот или секторов, т.е. позволяет идентифицировать номер БС либо сектора. Для различных БС сдвиг изменяется с постоянным шагом, равным 64 чип х PILOT INC, где системный параметр PILOT INC принимает значения от 1 до 4 [31). Таким образом, при минимальном шаге доступны 2~'/2 =2 =512 сдвигов коротких ПСП, т.е. возможно бесконфликтное существование сети, состоящей из 512 БС. Если же необходимо, чтобы сеть состояла из большего числа БС, то при территориальном планировании сети легко можно добиться, чтобы БС с одинаковыми циклическими сдвигами коротких ПСП не могли одновременно находиться в зоне радиовидимости МС.
С другой стороны, шаг сдвига ПСП однозначно определяет размер соты
(или сектора), при котором МС с гарантией различает ПСП, имеющие минимальный
временной сдвиг. Нетрудно убедиться, что при минимальном сдвиге в 64 чипа радиус
соты составит порядка
После перемножения с квадратурными ПСП сигнал в каждом из квадратурных плеч КФМ- модулятора фильтруется для формирования приемлемого спектра и перемножается со сдвинутыми на 90' гармоническими колебаниями центральной частоты суммирование выходов квадратурных плеч дает модулированный сигнал, в котором пилотная компонента совпадает с произведением пилот -сигнала (т.е. константы) с четырехфазное манипулированной несущей.
После вхождения в синхронизм с пилот- сигналом МС располагает информацией о фазе принимаемой несущей, временных границах чипов и периодов короткой ПСП (один период занимает 2"'/1,2288 10 = 26,666... мс), тогда как для приема со- общений необходимо знать границы кадров (каждый кадр трафика занимает 20 мс, см. g 11.2.3). Соответствующие сведения наряду с другими, нужными для установления и поддержания соединения, МС получает по каналу синхронизации. В формате сообщения этого канала содержатся данные о точном времени в системе (SYS TIME), значении циклического сдвига короткой ПСП данной БС (PILOT PN), идентификаторы БС и ЦКМС (MSC), значение мощности сигнала в пилотном канапе, параметры длинной ПСП (LC STATE), скорость передачи данных в канале персонального вызова (PRAT). Структуру физического канала синхронизации поясняет рис. 11.3 [31, 59].
Данные канала синхронизации, поступающие со скоростью 1200 бит/с, подаются на вход сверточного
кодера. После осуществления операции кодирования (длина
кодового ограничения— 9, скорость кода 1/2) с выхода снимается двоичная
последовательность со скоростью 2400 бит/с, поступающая далее на устройство
повторения, после которого скорость потока данных удваивается до 4800 бит/с.
Информация, передаваемая по каналу, структурирована в кадры длительностью в
26,666... мс. Каждый кадр совпадает с одним периодом короткой ПСП и содержит 32 бита исходных данных (128 символов
с учетом сверточного кодирования и повторения). Как видно из рис. 11.3, следующей операцией
является блочное перемежение в пределах кадра синхроканала, служащее для борьбы
с пакетными ошибками (см. ~ 7.3). После блокового перемежителя поток данных
подвергается прямому расширению спектра путем сложения по модулю 2 с присвоенной каналу синхронизации функцией
Уолша w32 ,и преобразования булевых переменных в
действительные

+1 и -1 (см. g 12.2.1). Как можно видеть, каждому биту информационного потока с выхода перемежителя (скорость 4,8 кбит/с) со- поставляется 1,2288 10 /4,8 10 =256 чипов, т.е. четыре периода последовательности Уолша. Иными словами, каждый бит кодированного потока в зависимости от значения заменяется четырьмя периодами прямой или инвертированной функции Уолша W32.
Последующие операции в канале повторяют рассмотренные ранее: сигнал канала синхронизации объединяется с сигналами других каналов, поступая на вход S на рис. 11.2, после чего в КФМ- модуляторе перемножается с комплексной короткой ПСП (скремблируется) и переносится на несущую.
Каждые три кадра (96 информационных бит) в канале синхронизации образуют один суперкадры длительности 80 мс, соответствующий четырем кадрам канала трафика (см. ниже). Сообщение, передаваемое по каналу синхронизации, может занимать более одного суперкадра, вследствие чего передаваемые данные подвергаются определенной структурной организации, называемой капсулированием. Полученная в результате подобного преобразования капсула состоит из самого сообщения синхроканала и добавочных бит, заполняющих оставшееся битовое пространство до начала следующего суперкадра. Необходимость подобной упаковки данных объясняется тем, что начало любого сообщения всегда должно совпадать с началом суперкадра.
Каждый кадр синхроканала начинается битом-заголовком, называемым ботом начала сообщения (start-of-message — SOM). Значение этого бита, равное 1, указывает на начало сообщения, передаваемого по синхроканалу, а значение, равное 0, свидетельствует о том, что текущий кадр содержит сообщение, начавшееся в некотором предыдущем кадре. В результате БС может передавать синхросообщение, занимающее несколько кадров подряд. Следует также отметить, что значение SOM-бита, равное 1, всегда должно совпадать с началом суперкадра, поскольку, как уже указывалось ранее, начало любого сообщения синхроканала всегда отвечает началу суперкадра. Ситуацию, соответствующую передаче по синхроканалу сообщения, занимающего два последовательных суперкадра, иллюстрирует рис. 11.4.
11.2.3. Канал персонального вызова
Канал персонального вызова предназначен для вызова МС и передаче ей системной информации. После получения БС сигнала подтверждения от МС по этому же каналу передается информация об установлении соединения и назначении канала связи. Сообщения, передаваемые по каналу вызова, могут быть четырех типов:
• заголовок (overhead message);
• пейджинг (вызов) (paging message);
• ордер (команда) (order message);
• назначение каналов (channel assignment message).

Заголовок содержит информацию о важнейших параметрах конфигурации системы и передается на МС в виде следующих типовых сообщений:
• параметры системы (system parameters message);
• параметры доступа (access parameters message);
• граничный
список (neighbor list message);
• список СОМА-каналов (CDMA channel list message). Первое из названных сообщений содержит сведения о параметрах эстафетной передачи: пороге включения (T ADD), пороге выключения (T DROP), значении таймера выключения (Т ТОРХОР) и др., параметрах регулировки мощности в прямом канале и т.п.
Сообщение о параметрах доступа содержит информацию о конфигурации канала доступа МС: числе проб при установлении доступа (NUM STEP), времени ожидания подтверждения (АСС ТМО), интервале между отдельными попытками доступа (BKOFF) и др., а также о некоторых параметрах управления мощностью в обратном канале: начальном значении мощности излучения в канале доступа (INIT PWR), шаге приращения мощности излучения (РВ/В STEP) и др.
Сообщение о граничном списке содержит перечень циклических сдвигов ПСП соседних БС или секторов, использование которого позволяет оптимизировать процесс эстафетной передачи.
Сообщение о списке СDМА- каналов позволяет МС узнать расположение тех полос (шириной 1,25 МГц) частотного плана, в которых размещены каналы персонального вызова. Указанные сообщения постоянно принимаются МС, а их содержание меняется с течением времени в зависимости от изменения положения МС в сети.
Пейджинговое сообщение содержит вызов, адресованный одной конкретной МС либо группе МС.
Сообщение типа "ордер" охватывает широкий класс команд управления МС. Данные сообщения используются для подтверждения регистрации МС, ее блокировки в состоянии сбоя и т.п.
Сообщения о назначении каналов указывают МС выделенный канал трафика, назначают ей другой канал персонального вызова и др.
Структурная схема формирования сигналов канала персонального вызова представлена на рис. 11.5. В отличие от канала синхронизации, скорость поступления информации в канале составляет 4,8 или 9,6 кбит/с. Исходный битовый поток проходит

через сверточный кодер и (только при входной скорости в 4,8 кбит/с) устройство повторения, так что при любой из двух начальных скоростей скорость кодированного потока оказывается равной 19,2 кбит/с. После осуществления блокового перемежения в пределах 20-миллисекундного кадра поток данных скремблируется децимированной длинной ПСП периода 24 — 1, а затем, подвергается расширению спектра так же, как это делалось для уже рассмотренных каналов: суммируется по модулю два с отведенной каналу функцией Уолша из набора с последующим переходом от булевых переменных к действительным <1 и — 1. Далее следует объединение с остальными каналами (входы P, — P> на рис. 11.2), а затем (в модуляторе) перемножение с комплексной короткой ПСП и перенос на несущую.
Символы длинной (как и короткой) ПСП имеют частоту следования 1,2288 Мчип/с, и потому для скремблирования потока после перемежения из длинной ПСП выбирается каждый 64-й символ (децимация с индексом 64). Маска генератора длинной ПСП, устанавливающая его начальное состояние, жестко связана с номером канала персонального вызова. Иными словами, маска генератора, используемая в канале вызова с функцией Уолша в отличается от маски генератора для канала вызова с в,. С какой целью это предусмотрено в стандарте, не вполне ясно, учитывая, что маска имеет весьма простую конструкцию [58] и, следовательно, реальным потенциалом защиты данных не обладает. Формирование же самой длинной ПСП осуществляется с помощью полинома [58]
Во временной области канал вызова поделен на временные интервалы (слоты) длительностью 80 мс (четыре кадра). Группа из 2048 слотов образует максимальный цикл (период) повторения слотов. Кадр, в свою очередь, разделен на два подкадра. Первый бит каждого подкадра получил наименование индикатора синхронизированной капсулы (synchronized capsuе indicator — SCI). Полный формат канала персонального вызова имеет вид, представленный на рис. 11.6.
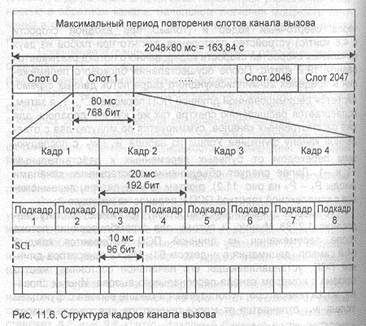
Поскольку сообщения в канале вызова могут занимать более одного подкадра и заканчиваться где-нибудь в его пределах, для того, чтобы отличить одно сообщение от другого, используют два варианта капсулирования информации: в виде синхронизированной и несинхронизированной капсул.
Если сообщение заканчивается в пределах подкадра, причем до следующего SCI-бита остается меньше 8 бит, то БС дополняет капсулу необходимым количеством добавочных бит с тем, чтобы она продлилась до начала следующего подкадра. В том случае, когда следующее капсулированное сообщение передается в синхронизированном варианте, то вне зависимости от величины остатка до SCI-бита БС добавляет в капсулу избыточные биты, чтобы продолжить ее до начала следующего подкадра. Однако, если сообщение заканчивается в пределах подкадра и до следующего SCI-бита остается более 8 бит, БС может использовать вариант несинхронизированной капсулы, т.е. передавать следующее сообщение сразу же после окончания предыдущего, не добавляя хвостовых избыточных бит. Отличить один вариант капсулирования от другого позволяют SCI-биты. Значение SCI-бита, равное 1, указывает на начало передачи по каналу вызова нового синхронизированного сообщения. Во всех остальных случаях значение SCI- бита равно О. Рис. 11.7 иллюстрирует случай передачи по каналу вызова трех последовательных сообщений в синхронизированном и несинхронизированном вариантах.

Каналы прямого трафика служат для передачи речевой информации и данных, а также информации сигнализации от БС к МС. Структура канала прямого трафика (см. рис. 11.8) за небольшим исключением в точности повторяет блок-схему канала персонального вызова. Основное отличие заключается в присутствии устройства мультиплексирования потока информационных данных и битов регулировки мощности (power control bits— PCB), а также в поддержании набора из 4 различных скоростей— 9,6; 4,8; 2,4 и 1,2 кбит/с, выбираемых в соответствии с текущей речевой активностью абонента.
Поток кодированных речевых данных поступает от вокодера со скоростью 8,6; 4,0; 2 0 или 0,8 кбит/с. После кодирования блоковым циклическим кодом CRC (добавление индикатора качества кадра выполняется только для первых двух скоростей) и приписывания "хвостовых" нулей для сверточного кодирования поток увеличивает скорость до соответствующего значения из четырех упомянутых. Сверточное кодирование удваивает символьную скорость, в результате чего на устройство повторения подается поток данных с одной из следующих скоростей— 19,2; 9,6; 4,8 и 2,4 кбит/с. Устройство повторения осуществляет выравнивание скоростей: поток данных с максимальной скоростью проходит повторитель без изменения, а скорость потока с более низкими значениями увеличивается за счет посимвольного повторения в 2, 4 и 8 раз соответственно. Основной целью подобного выравнивания является снижение уровня внутрисистемных помех, обусловленных эффектом многолучевости или сигналами соседних БС/секторов. Улучшение помеховой ситуации достигается снижением излучаемой мощности, пропорциональным числу повторений символов. К примеру, четырехкратное повторение символа при наименьшей (1,2 кбит/с) скорости речевого сообщения позволяет в четыре раза уменьшить мощность по сравнению со случаем максимальной (9,6 кбит/с) входной скорости без ухудшения достоверности передачи данных.
После символьного повторителя поток информационных данных подвергается процедуре блокового перемежения на длительности кадра в 20 мс, а затем скремблируется децимированной длинной ПСП, подобно тому, как это описано в ~ 11.2.3.

Единственное отличие состоит в том, что маска, задающая начальное состояние генератора ПСП, определяется электронным серийным номером (electronic serial number — ESN) МС в соответствии с некоторым секретным ключом.
Скремблированные данные далее мультиплексируются с командами регулировки мощности передатчика МС: определенные символы потока данных на входе мультиплексора заменяются РСВ- битами. Поскольку скорость поступления данных составляет 19,2 кбит/с, а частота РСВ- битов — 800 Гц, то замене подлежит лишь один из 24 символов информационной последовательности, причем РСВ- бит помещается в одну из первых 16 позиций. Точное положение бита регулировки мощности определяется псевдослучайным образом — указателем позиции РСВ- бита служит десятичное значение 4 наиболее значимых битов с выхода первого дециматора рис. 11.8.
Мультиплексированный поток данных манипулирует канальную поднесущую, в качестве которой используется одна из последовательностей Уолша скоростью 1,2288 Мчип/с, причем номер последовательности Уолша однозначно определяет номер канала прямого трафика. Детали этой операции обсуждались в Я 11.2.1 — 11.2.3. В результате каждому символу потока данных сопоставляется один период соответствующей функции Уолша, и тем самым осуществляется прямое расширение спектра информационного сообщения. После этого полученный сложный сигнал со скоростью 1,2288 Мчип/с в сумматоре на рис 11.2 объединяется с сигналами каналов пилот- сигнала, синхронизации и вызова, вслед за чем в модуляторе перемножается с комплексной ПСП (скремблируется) и переносится на несущую.
Упомянем, что, помимо скоростей 9,6; 4,8; 2,4 и 1,2 кбит/с, вокодер может поддерживать набор скоростей вида 14,4; 7,2; 3,6 и 1,8 кбит/с. Единственное отличие структуры канала при этом состоит в изменении скорости сверточного кода до 3/4 для поддержания прежней скорости в 19,2 кбит/с на входе блокового перемежителя.
11.3. Архитектура линии "вверх"
В обратном канале (линии "вверх") асинхронный вариант кодового разделения реализуется в комбинации с некогерентным приемом сигналов на БС. Благодаря этому отпадает необходимость в пилотном канале и канале синхронизации. В итоге остаются лишь два типа логических каналов линии "вверх":
• канал доступа (access channel);
• канал обратного трафика (reverse traffic
channel). Асинхронность кодового разделения делает нерациональным применение
функций Уолша в роли каналообразующих последовательностей (сигнатур) физических
каналов, так как при относительных временных сдвигах они не могут сохранять
ортогональность и имеют весьма непривлекательные взаимные корреляционные
свойства (см. Я 5.3.3). Поэтому за разделение каналов в линии "вверх" отвечают
различные циклические сдвиги длинной ПСП периода 2" — 1. Функции Уолша в
обратном канале также используются, но в ином качестве: для организации еще
одной ступени помехоустойчивого кодирования данных, передаваемых МС.
Общая структура обратного канала связи системы IS-95 иллюстрируется на рис. 11.9. Каналы доступа и обратного трафика, которые используются МС, ассоциированы с определенными каналами персонального вызова. В результате на один персонального вызова может приходиться до и = 32 каналов доступа и до т = 64 каналов обратного трафика.

Канал доступа обеспечивает соединение МС с БС, пока МС не настроилась на назначенный ей канал обратного трафика. Процесс выбора канала доступа случаен — МС произвольно выбирает номер канала из диапазона О...ACC CHAN, где ACC CHAN — параметр, передаваемый БС в сообщении о параметрах доступа. Канал доступа используется для регистрации MC в сети, передачи на БС запроса на установление соединения, ответа на команды, переданные по каналу вызова и др. Скорость передачи данных по каналу доступа фиксирована и составляет 4,8 кбит/с.
Процедура формирования сигнала в канале доступа представлена на рис. 11.10. Входные данные со скоростью 4,8 кбит/с подвергаются сверточному кодированию со скоростью 1/3. Применение кодера с более низкой скоростью (большей избыточностью), чем в прямом канале, как уже говорилось, объясняется более низкой помехоустойчивостью обратного канала вследствие ограниченности энергоресурса МС. После кодирования скорость информационного потока в числе кодовых символов возрастает до 14,4 кбит/с. Двукратное повторение символов в устройстве повторения доводит символьную скорость до величины 28,8 кбит/с. Применение блокового перемежения в пределах 20 мс кадра не меняет скорости информационного потока, так что на ортогональный модулятор данные поступают с прежней скоростью в 28,8 кбит/с.

Ортогональный модулятор осуществляет отображение (кодирование) групп из 6 двоичных символов в некоторую функцию Уолша длины 64. Подобная операция представляет собой кодирование 6-битовых блоков (64,6) ортогональным кодом (см. ~ 7.1). При оптимальном ("мягком") декодировании энергетический выигрыш от использования такого кода асимптотически стремится к 4,8 дБ [45]. В то же время во многих источниках рассматриваемую процедуру именуют ортогональной модуляцией или Уолш- модуляцией [58-61]. Замена 6 символьной группы на функцию Уолша производится по следующему правилу: десятичное значение 6 разрядного двоичного числа, соответствующего группе из 6 бит, однозначно определяет номер функции Уолша. Например, если на вход ортогонального модулятора подается группа из 6 символов вида (010110), то ей соответствует десятичное значение 22, а значит, эта группа заменяется модулятором на функцию Уолша w», состоящую из 64 символов. В результате ортогональной модуляции скорость данных возрастает до 28,8 х — =307,2 кбит/с. 64 4
Поток ортогонально модулированных данных подвергается прямому расширению спектра с помощью длинной ПСП с определенным циклическим сдвигом, однозначно определяющим данную МС, что позволяет идентифицировать ее на БС, а значит, осуществить кодовое разделение абонентов. Циклический сдвиг длинной ПСП определяется маской генератора длиной 42 бита, которая конструируется из идентификатора БС, номеров канала вызова и доступа.
После расширения спектра (суммирования по модулю 2 с длинной ПСП и преобразования булевых символов в двуполярные) поток, следующий со скоростью чипов, т.е. 1,2288 Мчип/с, поступает в квадратурные каналы фазового модулятора, где подвергается скремблированию двумя короткими ПСП (ПСП — ! и ПСП — Q) периода 2" . Все МС данной соты используют один и тот же сдвиг короткой ПСП. Поскольку в обратном канале применяется квадратурная ФМ со сдвигом (OQPSK, см. ~ 4.2), в плече 0 модулятора введен элемент задержки на половину длительности чипа. Применение OQPSK уменьшает глубину нежелательных провалов огибающей сигнала, а значит, сокращает требуемый линейный динамический диапазон усилителя мощности передатчика МС.
Сообщение канала доступа подвергается определенной структуризации (капсулированию) на временных отрезках, называемых слотами и кадрами (рис. 11.11). Слот канала доступа может состоять из (3+MAX CAP SZ)+(1+PAM SZ) кадров, где параметр MAX CAP SZ определяет максимальный размер капсулы сообщения канала доступа, а РАМ 82 — длину преамбулы канала доступа (значения этих параметров передаются на МС по каналу вызова). На длительности кадра (20 мс) содержится 88 информационных бит (тело Кадра) и 8 кодированных хвостовых бит (поле Т).
Сообщение канала доступа не обязательно занимает максимальный размер слота. На этот случай МС определяет необходимое число кадров для передачи сообщения и присваивает его переменной CAP SZ. Очевидно, что CAP SZ < 3+MAX CAP SZ. Пример подобного сообщения представлен на рис. 11.12.
Сообщение канала доступа передается в структурированной форме — в виде капсулы сообщения, содержащей CAP SZ x 88 бит. В том случае, когда размер передаваемого сообщения меньше длины капсулы, свободные позиции заполняются добавочными битами.

11.3.2. Канал обратного трафика
Канал обратного трафика обеспечивает передачу речевой информации и данных
абонента, а также управляющей информации с МС на БС, когда МС уже занимает
выделенный ей физический канал. Структура канала обратного трафика и процедуры
формирования сигналов практически аналогичны применяемым в канале доступа (рис. 11.13) с несколькими
оговорками. Во первых, скорость поступления данных в
канал обратного трафика не фиксирована, а может изменяться в зависимости от
речевой активности абонента. В канале осуществляется поддержка потока данных со
скоростями 9,6; 4,8; 2,4 и 1,2 кбит/с. Во-вторых, маска генератора длинной ПСП формируется с использованием закодированного
электронного серийного номера (ESN) МС. Наиболее же существенным отличием
является наличие дополнительного блока, называемого рандомизатором. Назначение
данного устройства состоит в реализации возможностей по снижению уровня
внутрисистемных помех в обратном канале за счет учета фактора речевой активности
абонента. Алгоритм учета речевой активности в прямом канале, основанный на
повторении символов с пропорциональным снижением передаваемой мощности,
неприемлем для линии "вверх", так как входит в противоречие с процедурой быстрой
регулировки мощности по замкнутой петле. Метод уменьшения средней мощности
излучения в обратном канале при снижении скорости речевого потока состоит в
псевдослучайном прореживании (или маскировании) избыточных символов,
образованных в результате операции символьного повторения. Рандомизатор
вырабатывает маскирующий образец, состоящий из нулей и единиц, в соответствии с
которым и осуществляется прореживание, причем соотношение между числом нулей,
отвечающих за исключение символов, и единиц определяется скоростью речевого
потока. Так, при максимальной скорости кодированной речи 9,6 кбит/с прореживание
отсутствует, т.е. маскирующий образец состоит из всех единиц. Если же скорость
речевого потока составляет 1,2 кбит/с, рандомизатор вырабатывает образец,
устраняющий в среднем семь из восьми символов.
На практике описанная процедура реализуется следующим образом. Как указывалось ранее, РСВ- биты поступают с частотой 800 Гц, т.е. с интервалом 1,25 мс. На основании этого 20 мс кадр канала трафика разбивается на 16 групп регулировки мощности. Рандомизатор псевдослучайным образом вырезает отдельные группы регулировки, причем количество вырезаемых групп определяется скоростью работы вокодера. При передаче речевых данных со скоростью 9,6 кбит/с ни одна из групп не исключается, если же скорость работы вокодера составляет 1,2 кбит/с, то из кадра в среднем вырезается 14 из 16 групп. При этом текущая маска, вырабатываемая рандомизатором, определяется фрагментом длинной ПСП, который использовался при расширении спектра предыдущего кадра.
В канале обратного (как и прямого) трафика предусматривается также поддержание набора скоростей 14,4; 7,2; 3,6 и 1,8 кбит/с. При этом для сохранения скорости кодированного потока в 28,8 кбит/с скорость сверточного кодера меняется с 1/3 на 1/2.
В заключение параграфа кратко рассмотрим формат передачи информации в канале трафика, а также способы мультиплексирования речевой (первичной) информации, данных (вторичной информации) и служебной информации (рис. 11.14). Кадр

обратного (как и прямого) трафика занимает 20 мс. При полно- скоростном (9,6 кбит/с) режиме кадр содержит 192 битовых позиции; в случае полускоростного режима (скорости поступления информации 4,8 кбит/с) кадр состоит из 96 бит и т.д. до 24 бит при скорости 1,2 кбит/с. При скоростях 9,6 и 4,8 кбит/с кадр содержит биты с информацией о качестве кадра (индикатор качества кадра). При всех скоростных режимах кадр заканчивается 8 кодированными хвостовыми битами.
Комбинированная передача первичной и вторичной (или служебной) информации определена стандартом IS-95 в двух режимах. В первом режиме, называемом blank and burst, вторичная или служебная информация полностью замещает речевую информацию в кадре, а значит, передача информации различного типа может производиться только в разных кадрах. Во втором режиме, носящем название dim and burst, в пределах кадра возможна совместная передача либо первичной и вторичной информации, либо первичной информации и информации сигнализации. Указанные режимы применяются лишь при полноскоростной передаче, т.е. при скоростях, меньших 9,6 кбит/с, передается первичная информация.

11.4. Принципы организации абонентского доступа
Остановимся теперь вкратце на операциях, которые система должна выполнять для установления, поддержания и прекращения соединения МС с другой стороной. Стандарт предусматривает вызов трех типов:
• исходящий из сети, когда МС инициирует соединение с абонентом стационарной телефонной сети общего доступа (ТФОП);
• входящий в сеть, когда абонент ТФОП инициирует соединение с МС;
• внутрисетевой, когда одна МС инициирует соединение с другой МС и все процедуры, связанные с обслуживанием вызова, осуществляются без обращения к ТФОП.
Поскольку МС является общим элементом всех перечисленных вариантов, стандарт IS-95 описывает организацию доступа с точки зрения МС, предоставляя БС максимальную свободу, не входящую в конфликт с действиями МС.
В течение штатного функционирования системы IS-95 МС может находиться в одном из следующих режимов:
• инициализация МС;
• ожидание;
• доступ в систему;
• контроль канала трафика.
11.4.1. Режим инициализации МС
После включения МС приступает к инициализации или начальному запуску, в течение которого последовательно проходит следующие этапы:
• определение типа системы;
• синхронизация по сигналу пилотного канала;
• выделение синхросигнала;
• подстройка системного времени.
В течение первого этапа МС определяет, с каким типом ССМС она будет взаимодействовать — аналоговой или СОМА,— поскольку все мобильные телефоны стандарта IS-95 являются двухрежимными. Если принимается решение в пользу второй из названных систем, МС определяет значение несущей в пределах выделенной полосы и переходит к следующему этапу.
На этапе захвата пилотного сигнала МС осуществляет поиск наиболее предпочтительной БС, уровень принятого пилотного сигнала которой является максимальным. МС подстраивает под этот сигнал циклические сдвиги опорных коротких ПСП в корреляторах и тем самым синхронизируется с БС по короткому коду. На выполнение данного этапа МС отводится ограниченный промежуток времени. Если в течение этого интервала МС не удается осуществить захват пилот- сигнала, она возвращается к предыдущему этапу. При положительном результате МС переходит сканированию канала синхронизации, использующему тот же циклический сдвиг короткой ПСП, что и пилот-сигнал.
Этап захвата сигнала синхронизации предполагает достижение доступа МС к синхроинформации той БС, на пилотный сигнал которой она настроилась. Примерный перечень параметров, передаваемых в сообщении синхроканала, приведен в 11.2.2. Следует отметить, что, как и на предыдущем этапе, на захват синхросигнала и прием синхроинформации отводится ограниченный интервал времени. Если МС не удается принять синхросообщение за отведенное время, она возвращается к этапу системного определения. Если же процедура начальной синхронизации завершена успешно, МС переходит к последнему этапу режима инициализации, на котором осуществляется настройка системного времени и синхронизация генератора длинной ПСП.
После завершения процедуры инициализации МС переходит к режиму ожидания, в течение которого осуществляется просмотр канала персонального вызова. Данная процедура, ориентированная на прием сообщения канала вызова или входящего вызова, выполняется либо в обычном режиме (путем перебора всех семи каналов вызова в полосе 1,25 МГц), либо в режиме временного разделения (slotted mode). Возможность последнего режима обусловлена способом передачи информации в канале вызова. Поскольку сообщения, адресованные той или иной МС, передаются в слотах, можно без затруднений организовать предварительное назначение слотов. Работа МС в режиме временного разделения позволяет МС сканировать только нужные слоты, отключаясь в перерывах между ними, что приводит к значительной экономии энергоресурса МС. Переход МС из режима ожидания в режим доступа происходит в результате одного из следующих событий:
• прием МС сообщения по каналу вызова, которое требует либо подтверждения, либо ответа;
• инициирование вызова со стороны МС;
• осуществление МС регистрации в сети.
Отметим, что в режиме ожидания возможна реализация МС эстафетной передачи, которая осуществляется по несколько иному алгоритму, чем при активном контакте МС с сетью. В режиме ожидания МС продолжает принимать сигналы пилотного канала. Если при движении из зоны действия одной БС к другой МС обнаружит, что пилотный сигнал новой станции интенсивнее сигнала от действующей, она подстраивает свои опорные генераторы ПСП под новый циклический сдвиг. Тем самым МС начинает просмотр канала вызова новой БС, а поскольку возможно сканирование канала вызова только одной БС, то механизм мягкой эстафетной передачи в режиме ожидания невозможен.
В случае перехода МС из режима ожидания в режим доступа по одной из указанных причин, между МС и БС осуществляется обмен сообщениями с использованием канала вызова (в прямом направлении) и канала доступа (в обратном). В зависимости от причины перехода к рассматриваемому состоянию МС выполняет одну из следующих процедур:
• обновление информации, полученной в сообщении типа "заголовок";
• ответ на вызов;
• инициирование вызова со стороны МС;
• регистрация
• ответ на команду или сообщение БС.
11.4.3.1. Обновление
информации
Сообщения типа "заголовок", передаваемые БС, в основном содержат значения параметров конфигурации системы либо параметров доступа, которые могут изменяться с течением времени. Для того чтобы МС могла определить, какие значения являются текущими, т.е. соответствуют данному моменту времени, а какие нет, каждое сообщение сопровождается номером, содержащимся в поле CONFIG _MSG_ SEQ или ACC_ MSG_ SEQ. В том случае если произошло изменение хотя бы одного параметра, БС увеличивает значение номера соответствующего сообщения на единицу. Таким образом, МС, приняв очередное сообщение с конфигурационными параметрами или параметрами доступа, сравнивает его номер с хранящимся в памяти. Если номер принятого сообщения выше, то МС обновляет значения соответствующих параметров, записывая их в память.
Помимо сообщений конфигурации и доступа, МС принимает следующие пейджинговые сообщения:
• вызова;
• вызова с использованием слотов;
• общее сообщение вызова.
Всякий раз, когда МС принимает пейджинговое сообщение, она просматривает его на предмет присутствия в нем международного идентификационного номера мобильного абонента— IMSI (International mobile station identification). Если находящийся в сообщении IMSI отвечает данной МС, то она переходит к этапу ответа на вызов.
11.4.3.2. Ответ на
вызов
Основным содержанием этого этапа является передача на БС по каналу доступа ответа на сообщение вызова. Данная операция осуществляется через процедуру доступа, описываемую ниже. Получив подтверждение, БС может направить МС по каналу вызова сообщение о назначении канала с целью установления соединения. Указанное сообщение содержит такие параметры, как CDMA FREQ (значение несущей СОМА-канала) и CODE CHAN (номер СОМА-канала), которые позволяют МС настроиться на канал прямого трафика.
11.4.3.3. Этап регистрации
На этом этапе МС передает на БС по каналу доступа регистрационное сообщение, используя процедуру доступа. В частности, МС передает свой электронный серийный номер — ESN (electronic serial number), присваиваемый заводом-изготовителем, и сетевой идентификационный номер — MIN (mobile identification number), а также статус, местоположение и др. с целью облегчить поиск МС при входящем вызове. Между частотой регистрации и размером зоны поиска МС должен существовать определенный
компромисс, который поддерживается оператором сотовой сети. Если, например, МС не будет вообще регистрироваться, то ЦКМС лишится сведений о том, включена ли МС, находится ли она в зоне его обслуживания, а если находится, то где именно. В отсутствие априорной информации о местоположении МС зона поиска окажется чрезмерно велика, что приведет к значительной нагрузке на каналы персонального вызова, поскольку все БС сети будут вовлечены в передачу поисковых сообщений. С другой стороны, частая регистрация позволит ЦКМС локализовать зону по- иска МС с большой точностью, что, казалось бы, снизит нагрузку на каналы вызова. Это, однако, приведет к увеличению нагрузки на каналы доступа, а следовательно, и на каналы персонального вызова, по которым БС передают подтверждение о регистрации. Таким образом, эксплуатация ССМС предполагает поддержание некоторого оптимального соотношения между частотой регистрации МС и размером зоны ее поиска, при котором сетевой ресурс используется наиболее эффективно.
Стандарт предусматривает ряд форм регистрации МС в сети:
• при включении МС;
• при выключении МС;
• по сигналу таймера;
• по измеренной дистанции;
• по зоновому принципу;
• при изменении контрольных параметров;
• по команде БС;
• по умолчанию.
Информацию об используемых формах регистрации и соответствующих контрольных параметрах БС передает по каналу персонального вызова с помощью сообщения о системных параметрах. Так, например, при регистрации по измеренной дистанции БС сообщает свои координаты и пороговую дистанцию. Каждый раз, получая координаты новой БС, мобильная станция определяет текущее расстояние до места последней регистрации. При превышении порога следует процедура регистрации и новая БС становится точкой отсчета и центром текущей зоны поиска МС [62].
11.4.3.4. Ответ на
команду или сообщение БС
На этом этапе МС посылает ответ на отличные от ранее рассмотренных сообщения, принятые от БС. Примером может служить ответное сообщение МС на запрос об аутентификации со стороны БС. Как и другие, ответное сообщение передается по каналу доступа с использованием процедуры доступа.
Разработка процедуры доступа МС к ССМС, или механизма соединения с БС, затруднена необходимостью установления одновременной связи нескольких МС с одной БС. В некоторой степени решению проблемы способствует организация раздельной работы МС путем назначения ей различных каналов доступа. БС, установив некоторое значение параметра АСС CHAN в сообщении о параметрах доступа, предоставляет МС возможность случайным образом выбрать номер канала доступа из интервала 0...АСС CHAN. Однако, если один и тот же канал доступа используют несколько МС, то велика вероятность совпадения по времени их передач. Для исключения подобной ситуации необходимо рандомизировать время передачи сообщений различных МС таким образом, чтобы вероятность совпадения была минимальной.
Как следует из ранее изложенного, сообщения, передаваемые по каналу доступа, условно можно разделить на два типа:
• передаваемые МС в ответ на сообщения БС;
• запросные, инициируемые МС.
Соответственно этому существуют два различных механизма доступа.
Механизм установления соединения с БС основан на таком понятии, как попытка доступа (access attempt). Каждая попытка доступа включает последовательность проб, т.е. передач с нарастающей мощностью (access probe sequences) (см. рис. 11.15).
В случае ответного сообщения максимальное число последовательностей в попытке доступа определяется параметром MAX RSP SEQ, значение которого устанавливается системным оператором и не может превышать 15, т.е. N <MAX RSP SEQ. При организации запроса максимальное число последовательностей в попытке задается параметром MAX REQ SEQ, который, и ранее, устанавливается оператором и лежит в том же интервале допустимых значений. Пробные последовательности могут передаваться по разным каналам доступа, поскольку перед каждой передачей последовательности номер канала выбирается случайным образом на интервале О...ACC_ CHAN.

Случайным является и время между последовательностями проб TS. Так, для ответного сообщения временной промежуток Т$ определяется как равномерно распределенная на интервале 0...(1+BKOFF) случайная величина, выраженная в числе слотов канала доступа. Пусть, например, значение параметра BKOFF равно 3, тогда случайная величина определена на интервале от 0 до 4. Если TS примет значение, равное 3, то расстояние между двумя последовательностями проб составит промежуток, равный трем длительностям слота канала доступа. При этом расстояние между последовательностями определяется заново для каждой новой попытки.
В случае запросного сообщения рандомизация временного интервала между последовательностями проб осуществляется по более сложному алгоритму. Промежуток между последовательностями в числе слотов определяется как сумма двух случайных величин, первая из которых, как и ранее, выбирается на интервале 0...(1+BKOFF), а вторая зависит от результата теста, проводимого МС. В качестве входных параметров теста используются причина возникновения доступа, класс обслуживания и др. Например, если МС обладает высоким приоритетом доступа, то вероятность положительного результата теста велика. Это означает, что после текущей последовательности проб МС задержит передачу следующей только на величину, выбираемую на интервале 0...(1+BKOFF), т.е. задержка обусловлена только первой составляющей. Затем тест вновь повторяется, и в случае успешного его прохождения величина интервала задержки опять будет определяться прежним образом. Если же тест не проходит, то задержка дополнительно увеличивается на длительность одного слота. После этого МС опять повторяет тест, и данная дополнительная задержка будет возрастать слот за слотом, пока тест не завершится успехом.
Введение дополнительной случайной составляющей в величину промежутка между последовательностями проб доступа обусловлено стремлением к еще большей рандомизации начала времени передачи запросных сообщений, т.е. сообщений, посылаемых МС автономно. Необходимость подобной процедуры диктуется тем, что, в отличие от ответных сообщений, частота передачи запросных не поддается контролю БС, а значит, существует вероятность одновременного запроса канала доступа несколькими МС.
Подробная структура последовательности проб представлена на рис. 11.15. Каждая проба доступа (access probe) представляет собой короткий запросный пакет, который передается в течение длительности слота канала доступа с определенным уровнем мощности. Максимальное число проб, составляющих последовательность, определяется параметром NUM STEP, значение которого устанавливается оператором системы и не превышает 15.
Для того чтобы снизить уровень помех в процессе доступа, используется метод передачи, при котором каждая последующая проба передается с нарастающим от начального значения Р, уровнем мощности. Начальный уровень мощности регулируется разомкнутой петлей управления мощности. Приращение уровня излучения ЬР от запроса к запросу определяется параметром Р6/В STEP, называемым коррекцией проб доступа.
После излучения запросного пакета МС ожидает ответа- подтверждения в течение времени, задаваемого с помощью параметра АСС TMO как
TA = 80 х (2 + ACCTMO) мс.
Если ответное сообщение на запрос будет получено за время ожидания ТА, то попытка доступа считается успешно завершенной. Если же подтверждения за указанный интервал получено не было, МС задерживает следующий запрос на промежуток времени TR, определяемый случайным образом из диапазона значений от 0 до (1 + PROBE BKOFF) в числе слотов канала доступа, после чего процедура передачи повторяется.
11.4.5. Режим контроля канала трафика
Этот режим функционирования МС наступает либо после этапа ответа на вызов, либо по успешном завершении инициирования вызова и установлении связи с БС, как описано в 11.4.4. В данном режиме МС осуществляет обмен информацией с БС, используя каналы прямого и обратного трафика. Основные этапы:
• инициализация канала трафика;
• ожидание команды;
• ожидание ответа;
• разговор абонентов;
• завершение разговора.
11.4.5.1. Инициализация канала
трафика
На этапе инициализации канала трафика МС проверяет свою способность к приему информации от БС по каналу прямого трафика. Подтверждением данной возможности служит уверенный прием И, последовательных кадров за время Т„(например, двух кадров за 200 мс), где И, и Т,~ — параметры, определяемые стандартом IS-95. В случае успешного завершения проверки МС начинает передавать по каналу обратного трафика преамбулу канала трафика. После принятия команды подтверждения от БС в пределах временного интервала Т,„нахождения на этапе инициализации (например, 2 с) дальнейшее функционирование МС определяется типом вызова:
• если вызов является входящим, МС переходит этапу ожидания команды;
• если вызов исходящий, то МС переходит к этапу разговора.
Возможен и другой сценарий действий МС, в результате которого она возвращается на начальный этап режима инициализации МС. Подобное происходит тогда, когда МС не принимает либо заданного количества кадров от БС, либо команду подтверждения приема БС преамбулы за отведенный интервал времени.
11.4.5.2. Ожидание
команды
МС переходит на этот этап после инициализации канала трафика при
входящем вызове. На данном этапе МС ожидает приема от БС по каналу прямого
трафика сигнала готовности с информационным сообщением, представляющего собой
посылку вызова (звонок) с номером вызывающего абонента. В случае приема МС
сигнала готовности она переходит к этапу ожидания ответа МС. Если же МС в
течение 5 с после перехода на этап ожидания команды не примет сигнала
готовности, то возвращается на начальный этап режима инициализации.
11.4.5.3. Ожидание ответа МС
Переход МС на этап ожидания ответа возможен только с этапа ожидания команды при входящем вызове. В рамках этого этапа МС ожидает ответа абонента на вызов. Если абонент отвечает на вызов, МС отключает звуковой сигнал вызова, передает команду на соединение по каналу обратного трафика БС и переходит к этапу разговора абонентов.
11.4.5.4. Разговор
абонентов
Как следует из описания предыдущих этапов, этап разговора абонентов начинается либо после этапа инициализации канала трафика (при исходящем вызове), либо после этапа ожидания ответа МС (при входящем вызове). В ходе этапа происходит обмен первичной (речевой) информацией между БС и МС с использованием каналов прямого и обратного трафика.
11.4.5.5. Завершение разговора
На данном этапе осуществляется прекращение разговора и соединения БС с МС. Если инициатором разъединения является МС, она передает по каналу обратного трафика команду на прекращение соединения с БС. В противном случае аналогичную операцию осуществляет БС по каналу прямого трафика.
Эстафетная передача, неоднократно упоминавшаяся в книге, является неотъемлемым атрибутом любых ССМС, ответственным за непрерывность контакта абонента с сетью при перемещении МС из соты в соту. Гладкость" эстафетной передачи особенно важна для абонентов в активном состоянии, поскольку) ощутимые нарушения связи в ходе разговора резко снижают качество передачи речевой информации и нервируют потребителя. Стандарт IS-95 поддерживает три механизма эстафетной передачи МС:
• межсистемная, или жесткая, эстафетная передача (hard
handoff);
• внутрисистемная, или мягкая, эстафетная передача (soft handoff);
• межсекторная (softer handoff). Различают два типа жесткой
эстафетной передачи:
• при переходе МС из зоны обслуживания одного
оператора СDМА-системы в зону обслуживания другого либо
при переходе из одного частотного диапазона (1,25 МГц) в другой. В обоих случаях
МС остается в зоне обслуживания СDМА системы, поэтому данную эстафетную
передачу иногда называют D-to-D (Digital -to-Digital);
• при переключении МС с СОМА-системы на аналоговую ССМС. В этом случае эстафетная передача носит
наименование D-to-А (Digital-to-analog).
Алгоритм жесткой эстафетной передачи аналогичен описанному в предыдущей главе. Когда интенсивность принимаемого от МС сигнала становится меньше некоторого порога, обслуживающая БС посылает об этом сообщение в ЦКМС. По команде ЦКМС соседние БС с помощью сканирующих приемников осуществляют измерение уровня сигнала, принимаемого от данной МС. Если результат измерения какой-либо БС превысил установленный порог, то ЦКМС инициирует процедуру эстафетной передачи, выделяя МС один из свободных каналов трафика новой БС, и переключает вызов из старой соты в новую. Очевидно, что при жесткой эстафетной передаче неизбежно прерывание соединения, что отрицательно сказывается на качестве приема речевой информации.
При мягкой эстафетной передаче, впрочем, как и при (текущей БС и новых). Так, при межсотовой эстафетной передаче может быть задействовано до трех соседних сот, а при межсекторной — два сектора одной соты. В обоих вариантах МС, используя приемник RAKE, осуществляет раздельный прием сигналов каналов прямого трафика либо различных БС, либо секторов БС. Произведя оценку качества приема сигналов, МС с помощью селектора формирует результирующий сигнал путем "склеивания" наилучших по качеству кадров различных БС, что и обеспечивает механизм мягкой эстафетной передачи. Отличие же между межсотовой и межсекторной передачей состоит в субъекте формирования подобного же результирующего сигнала в обратном канале. Поскольку при межсотовой эстафетной передаче прием сигналов осуществляется разными БС, то оценка качества кадров производится ЦКМС, тогда как при межсекторной передаче обслуживания данная операция выполняется многосекторной БС.
Характерной чертой мягкой эстафетной передачи (в отличие от жесткой) является непосредственное участие в ней МС. Последняя оценивает качество канала связи, измеряя отношение
сигнал — шум в пилотном канале, приходящееся на один чип, и передает результаты
измерения на БС. Существенная роль МС в осуществлении передачи обслуживания
нашла отражение в названии этой процедуры — mobile-assisted handoff (MAHO).
По результатам произведенных измерений ЦКМС формирует четыре списка БС в виде перечня циклических сдвигов короткой ПСП, т.е. пилот- сигналов, которые передаются МС для использования в процедуре эстафетной передачи:
• активные каналы (active
set);
• каналы-кандидаты (candidate set);
•
граничные каналы (neighbor set);
• остальные каналы (remaining set).
Список активных каналов представляет собой перечень БС или секторов БС, с которыми в данный момент осуществляется связь по каналам трафика. Пополнение данного списка производится по команде с БС в виде сообщения по руководству эстафетной передачей (handoff direction message). Список активных каналов может содержать от 1 до 6 БС (секторов), причем если в нем содержится только один пилот-сигнал БС, то мягкая эстафетная передача не производится.
Список каналов-кандидатов состоит из тех плотных каналов, для которых отношение сигнал — шум незначительно отличается от аналогичного параметра активных каналов и которые могут претендовать на участие в мягкой эстафетной передаче. Включение пилот канала в данный перечень производится в случае превышения отношением сигнал — шум порога включения (или порога обнаружения пилот-сигнала — pilot detection threshold T ADD). Удаление БС (сектора) из этого списка происходит тогда, когда интенсивность ее пилот- сигнала оказывается ниже порога исключения (pilot drop threshold T DROP) в течение интервала времени, задаваемого параметром T TDROP (handoff drop timer expiration vаlие). Как и в предыдущем случае, список каналов- кандидатов может содержать до 6 представителей. Укажем, что БС может быть переведена из списка активных в список кандидатов в том случае, если она не содержится в сообщении по руководству эстафетной передачей, однако еще не истекло время, задаваемое Т TDROP,
Список граничных каналов содержит множество тех БС, которые расположены по соседству с обслуживающей МС в данное время. Первоначально подобный список состоит из тех БС, сведения о которых содержатся в сообщении neighbor list message, передаваемом по каналу вызова БС, в зоне которой находится МС. Для того чтобы список соседних БС соответствовал текущему положению МС в системе, каждому пилот- каналу в граничном списке сопоставляется специальный счетчик времени (aging counter). Счетчик обнуляется, когда пилотный канал помещается в граничный список из активного или списка кандидатов. Значение счетчика увеличивается на единицу всякий раз после приема сообщения с обновленными данными (neighbor list update message). Если значение счетчика какого-либо граничного представителя превысит порог NGHBR MAX AGE, канал переводится в список остальных. Список граничных каналов может содержать до 20 пилотных каналов. Пилотный канал может быть переведен из активного или списка кандидатов в граничный, если сведения о нем не содержатся в сообщении handoff direction message, причем промежуток времени с момента исключения превышает T TDROP.
Список остальных каналов включает все БС, использующие одну и ту же частотную полосу в 1,25 МГц и не входящие ни в один из трех ранее упомянутых списков.
Рис. 11.16 дает примерную иллюстрацию процедуры мягкой эстафетной передачи МС, движущейся из зоны обслуживания БС1 в направлении к БС2. До момента времени (1) МС обслуживается только БС1, пилот-сигнал которой является единственным представителем списка активных канал

отслеживает наиболее сильные многолучевые компоненты сигналов в пилотном канале, оценивает их интенсивность в виде отношения сигнал — шум на чип q, и сравнивает полученные оценки с двумя порогами Т А00 и Т DROP. Как видно из рис. 11.16, в момент времени (1) уровень пилотного сигнала БС2, не относящейся в данный момент к списку активных, превышает порог T ADD. МС по каналу обратного трафика информирует БС об этом превышении порога в сообщении pilot strength measurement message и переводит пилотный канал БС2 из граничного списка в список кандидатов. БС1 сигнализирует ЦКМС об указанном превышении порога, а тот в свою очередь определяет необходимость и возможность инициирования мягкой эстафетной передачи и при положительном решении командует контроллеру БС начать процедуру эстафетной передачи. КБС принимает команду и выделяет МС свободный канал прямого трафика БС2.
В момент времени2) МС принимает от БС1 сообщение hand- off direction message, в котором указывается на необходимость установления связи с новой БС2 и содержатся значение циклического сдвига короткой ПСП БС2 и номер функции Уолша, соответствующей выделенному каналу прямого трафика. После осуществления синхронизации по новому пилот-сигнала и захвата канала трафика МС в момент времени (3) переводит пилот-канал БС2 из списка кандидатов в список активных каналов и посылает на БС сообщение об режима мягкой эстафетной передачи (handoff completion message) по каналу обратного трафика. Начиная с этого момента список активных каналов состоит из двух представителей- БС1 и БС2, а МС начинает работу в режиме мягкой эстафетной передачи, используя два различных канала прямого трафика и формируя результирующий сигнал "склеиванием" информационных кадров различных БС лучшего качества.
Дальнейшее передвижение МС изменяет энергетику принимаемых ею сигналов от БС. В момент (4) МС обнаруживает падение уровня пилотного сигнала БС1 ниже порога выключения T DROP и запускает таймер, определяющий интервал времени, в течение которого интенсивность принимаемого сигнала ниже допустимой величины. Если уровень сигнала вновь возрастет и превысит порог T DROP до превышения таймером значения T TDROP, то таймер обнуляется, а пилот-канал БС1 остается в списке активных. В рассматриваемом примере в момент времени (5) показание таймера превысило значение порога Т TDROP и МС передает на базовую (и далее в ЦКМС) измеренное значение отношения сигнал-шум и текущее значение таймера в сообщении pilot strength measurement message. На основании полученных измерений ЦКМС принимает решение о завершении эстафетной передачи и удаляет канал БС1 из списка активных, сигнализируя об этом МС в сообщении handoff direction message. В момент времени (6) МС принимает указанное сообщение, в котором содержится только циклический сдвиг ПСП БС2, отключает канал трафика БС1, переводит ее пилот-канал из активного списка в граничный и передает на БС сообщение о завершении эстафетной передачи (handoff completion message).
Как следует из рассмотренного примера, эффективность мягкой эстафетной передачи в значительной степени определяется правильным выбором порогов T ADD и T DROP, а также временем срабатывания таймера Т TDROP. Установка низших порогов и большого интервала Т ТЮЯОР приводит к расширению списка активных каналов и снижению частоты его обновления, что, с одной стороны, обеспечивает лучшее качество связи (поскольку в эстафетной передаче участвует большее количество БС), но, с другой — приводит к возрастанию нагрузки на каналы прямого трафика, а значит, к снижению абонентской емкости системы. Установка высоких порогов и малого времени срабатывания таймера увеличивает частоту обновления списков и сокращает число активных каналов, а значит, сохраняет системный ресурс, однако качество связи ухудшается, поскольку в эстафетной передаче задействовано малое количество БС. Вместе с тем, возрастает частота обмена служебной информацией между МС и БС, что опять увеличивает нагрузку на систему.
12. РАДИОИНТЕРФЕЙСЫ МОБИЛЬНЫХ
СИСТЕМ СВЯЗИ ТРЕТЬЕГО ПОКОЛЕНИЯ
12.1. Общая концепция мобильной связи третьего поколения
Как неоднократно упоминалось, линия, разделяющая пер- вые два поколения мобильной связи, весьма отчетлива:
стандарты первого поколения (NMT-450, NMT-900, AMPS, ТАСС и др.) были
аналоговыми, тогда как появившиеся в первой половине 1990-х гг. системы второго
поколения (GSM, D-AMPS, PDC/JDC) воплотили многие потенциальные преимущества
цифровой передачи сообщений (эффективная компрессия данных, помехо- устойчивое
кодирование, простота реконфигурирования, технологичность и стабильность
аппаратных средств и т.д.). Хотя на момент написания книги системы первого
поколения все еще функционируют и даже расширяются в некоторых регионах земного
шара, многие страны с развитой телекоммуникационной инфра- структурой практически отказались от их использования,
найдя более рациональные варианты утилизации отводившихся им прежде диапазонов
частот (GSM-450, GSM-800). В Финляндии, к примеру, являющейся одним из мировых
лидеров в области передовых информационных технологий, операторы сетей NMT
вывели последние из эксплуатации к концу
В ходе стремительной экспансии коммерческих сетей мобильных телекоммуникаций довольно быстро стало очевидным, что потенциальный спектр предоставляемых ими услуг может простираться далеко за рамки первоначального назначения— беспроводного телефонного сервиса. Среди экспертов в области информационного маркетинга на определенном этапе утвердилось убеждение, что транснациональные электронные гиганты могут не выжить в телекоммуникационном секторе бизнеса, если не выступят со стратегическими инициативами, существенно раздвигающими горизонты сетей мобильной связи. Огромным стимулирующим фактором при этом явилось взрывное развитие Internet и охват им невиданной по своим масштабам аудитории. В итоге мобильные системы связи XXI века стали рассматриваться как универсальные сети, обеспечивающие высокоскоростной информационный обмен с потребителем, не ограничивая свободы перемещения последнего и поддерживая в любой географической точке Земли качество услуг на уровне того, которое могло бы быть предоставлено любой самой продвинутой стационарной сетью транспортировки информации (ISDN, LAN и пр.). При этом формат передаваемых данных может быть самым разнообразным: обычный телефонный разговор, компьютерные файлы, факсимильные, Мультимедийные и аудиовизуальные сообщения, Internet-пакеты, электронная почта и др.
Нетрудно понять, что в рамках стандартов второго поколения подобная программа не представляется осуществимой в первую очередь из-за низких скоростей передачи данных. Спецификация GSM, например, предусматривает скорости 9,6 или 14,4 кбит/с, в то время как для передачи мультимедийных данных требуются многократно большие скорости.
Отметим, что сообществом GSM предприняты активные шаги в направлении приближения стандарта к новым реалиям. В литературе соответствующие предложения часто упоминают как "поколение 2,5" (2,5G), характеризуемое тремя основными дополнениями базовому стандарту [39, 58, 59]. Первое, обозначаемое аббревиатурой HSCSD (high-speed circuit-switched data), состоит в предоставлении одному и тому же пользователю нескольких слотов в GSM-кадре (см. g 10.2), что увеличивает скорость передачи в соответствующее число раз. Второе — GPRS (general packet radio service) — предусматривает организацию специального канала пакетной передачи со скоростями до 115 кбит/с (или даже выше, но без помехоустойчивого кодирования). Наконец, третье — EDGE (enhanced data rates for global evolution) — подразумевает введение, наряду с гауссовской МЧМ, добавочного модуляционного формата: восьмеричной ФМ, утраивающей скорость передачи в рамках фиксированного частотного ресурса. Согласно рекламным материалам, совокупность всех названных мероприятий позволит повысить скорость передачи до 384 кбит/с. Разумеется, компании, насыщающие рынок аппаратурой других стандартов, стремятся избежать роли аутсайдеров и анонсируют усовершенствования аналогичного плана. Примером этого служит реализованный в рамках стандарта IS-95 обмен абонентской емкости на скорость передачи, позволяющий поднять последнюю до 115 кбит/с. Однако временный, переходный характер
р такого рода
модернизаций очевиден: максимизация
скорости означает предоставление всего имеющегося ресурса единственному потребителю, а ухудшение качества связи, сопутствующее применению ФМ8 и отказу от канального кодирования, резко ограничит зону обслуживания БС. Поэтому интенсивная работа по подготовке нового стандарта мобильной связи, откликающегося на вызовы XXI века, началась еще до возникновения вышеупомянутых проектов.
Инициаторами и наиболее заинтересованными субъектами разработки стандартов третьего поколения (3G) явились Международный Телекоммуникационный Союз (ITU — International Теlеcommunication Union), Европейский институт телекоммуникационных стандартов (ETSI — Еигореап Teiecommunicafion Standards Institute), ассоциации радио промышленников США (TIA — Telecommunications Industry Association) и Японии (ARIВ — Association of Radio Industries and Businesses), органы, представляющие интересы телекоммуникационных сообществ Китая и Кореи, а также крупнейшие корпорации, определяющие конъюнктуру мирового рынка (Nokia, Ericsson, Qualcomm, Motorola, Lucent, Nortel и др.). Несмотря на то что история вопроса укладывается в весьма непродолжительный временной отрезок, ее повороты и коллизии уже составили сюжет весьма объемистых томов [63]. Первоначальный энтузиазм по поводу грядущего единого всемирного стандарта довольно быстро иссяк, когда вскрылись истинные масштабы разногласий, разделяющих потенциальных партнеров.
Одним из камней преткновения оказалось несоответствие распределений частот в различных частях света, затрудняющее стандартизацию диапазонов и отягощающее выработку единой системной концепции. Другим серьезным препятствием явилось естественное стремление ряда корпораций, особенно лидеров в продвижении систем стандарта IS-95 (QUALCOMM, Lucent и т.д.), максимально сгладить производственные проблемы, неизбежно сопровождающие переход на новые технологии, и соблюсти преемственность между 2G и 3G стандартами. Позиции сторон временами становились столь непримиримыми, что сама идея консолидации подходов казалась нереальной. Однако, в итоге многочисленных взаимных уступок, компроммисов и попыток гармонизации проектов относительное согласие к 2000 году было все же достигнуто. В его основу легла трактовка, допускающая сосуществование под общим флагом 3G стандарта параллельных спецификаций (семейство IMT- 2000), отражающих корпоративные точки зрения определенных групп при сохранении единого пони-
мания задач мобильной связи в наступившем столетии и унификации некоторых наиболее весомых системных показателей.
Согласованные базовые требования, определяющие философию 3G, в укрупненной формулировке таковы [40]:
• скорость передачи данных до 2 Мбит/с в пределах полосы не более 5 МГц;
• возможность варьирования скорости в широком диапазоне в зависимости от характера передаваемых данных;
• возможность мультиплексной передачи в рамках одного контакта данных разнообразного содержания и разного уровня требований к качеству (речь, мультимедиа, пакеты и т.п.);
• сосуществование систем 2G и 3G и возможность эстафетной передачи между ними с целью расширения зон покрытия и выравнивания трафика;
• поддержка асимметричного режима работы, когда линия "вниз" имеет значительно более напряженный трафик (например, при поиске информации в Internet) по сравнению с линией "вверх";
• возможность реализации дуплексной передачи в вариантах как частотного, так и временного разноса линий "вниз" и "вверх";
• максимальная гибкость сетевого оборудования и возможность
построения его на основе "набора инструментов" (toolbox)
• доступность мобилизации наиболее современных резервов улучшения качества связи (адаптация к условиям распространения, пространственная селекция терминала — smart- антенны, многопользовательские — multiuser-приемники и т.д.).
К середине
Второй проект, известный под именем cdma2000, является максимально
преемственным по отношению к системе cdmaOne (IS-
В последующих разделах главы дается краткий обзор ключевых решений, составляющих основу физического уровня упомянутых 3G стандартов. При этом большая часть материала посвящена радиоинтерфейсу UMTS, учитывая, с одной стороны, опережающие позиции этого проекта в плане близости к реализации, а с другой — большую притягательность (по впечатлению авторов, которое может не оправдаться) для российского рынка телекоммуникационных услуг.
Справедливости ради следует подчеркнуть, что, по крайней Mepe, на момент подготовки рукописи семейство IMT-2000 не исчерпывалось лишь названными предложениями. Так, корейский консорциум во главе с ETRI (Electronics and Telecommunications Research Institute) отстаивает проект ТТА 1, близкий к cdma2000, однако в большей мере ориентированный на национальную специфику мобильных сетей, в которых технология СОМА является монопольной. Кроме того, нельзя сбрасывать со счетов проект UWC-136 (Universal Wireless Communications), настойчиво лоббируемый операторами стандарта IS-136. Являясь развитием последнего в направлении запросов третьего поколения, этот проект, в отличие от предыдущих, базируется на платформе временного разделения (ТОМА) и имеет определенные рыночные перспективы, по крайней мере, в Северной Америке.
12.2. Радиоинтерфейс системы UMTS/FDD
12.2.1. Общая характеристика и основные параметры
Спецификация 3GPP [64] представляет собой чрезвычайно громоздкий документ, завершенная версия которого по оценкам будет содержать более 4000 страниц [41]. По своему назначению это директива, главная цель которой дать однозначные и недвусмысленные указания, подлежащие обязательному выполнению любым производителем и оператором. Читатель, интересующийся технологией выбора тех или иных решений, их теоретическим обоснованием, степенью близости к оптимальным, вряд ли вправе рассчитывать найти ответы на подобные вопросы в тексте стандарта 3GPP. Тем более наивной была бы попытка детального и подкрепленного серьезным анализом описания стандарта в рамках небольшой по объему главы. Остановимся лишь на наиболее принципиальных чертах физического уровня радиоинтерфейса UTRAN, определяющих философию системы, призванной стать одним из основных коммуникационных средств наступившего столетия.
Международным регламентом для 3G-систем на европейском и большей части азиатского субконтинентов выделены участки спектра в районе частоты 2 ГГц: 1920...1980 МГц для линии "вверх" и 2110...2170 МГц для линии "вниз". Тем самым предусматривается организация дуплексной связи на основе частотного разнесения (FDD — frequency division duplex). Однако указанные диапазоны доступны не во всех частях света в силу исторически сложившегося распределения частот, и потому в некоторых регионах (например, США) реализация частотного дуплекса оказывается невозможной. В силу этого, наряду с основным (частотным) вариантом дуплекса, стандарт оговаривает и дополнительный — временной (TDD — time division duplех), в котором часть временного кадра выделяется для передачи сообщения от БС к МС, тогда как другая служит для передачи в обратном направлении. В настоящем разделе рассмотрение концентрируется на варианте FDD, отличия в структуре и параметрах физического уровня TDD кратко обсуждаются в g 12.3.
Стандартом предписывается выполнение всех требований, перечисленных в 12.1, и, в частности, установлены жесткие ориентиры по скорости передачи:
• вне пределов больших городов при скорости движения пользователя до 500 км/час не менее 144 кбит/с (в будущем до 384 кбит/с);
• в пригородной и городской зоне при скорости до 120 км/час не менее 384 кбит/с (в будущем до 512 кбит/с);
• внутри помещений при скорости до 10 км/час не менее 2 Мбит/с.
Кроме того, спецификация 3GPP определяет UMTS как широкополосную (spread spectrum) систему с кодовым разделением (CDMA) и прямым (direct sequence) расширением (см. ~ 5.2), жестко оговаривая структуры расширяющих, канализирующих и скремблирующих кодов (см. ниже), а также устанавливая единую и неизменную частоту следования чипов названных кодов в 3,84 Мчип/с (3,84 10' чипов в секунду).
12.2.2. Логические, транспортные и физические каналы
Под физическим уровнем UTRAN в соответствии с общей классификацией многоуровневых открытых систем (см. g 1.1) понимается совокупность процедур и средств, непосредственно связанных с обменом данными между БС и МС. К таковым, среди прочего, относятся:
• помехоустойчивое канальное кодирование, мультиплексирование и демультиплексирование данных, поступающих с верхних уровней;
• согласование скоростей информационных потоков, поступающих по транспортным каналам с сеткой скоростей, предоставляемых физическими каналами;
• отображение транспортных каналов на физические;
• модуляция, расширение (spreading) и сжатие (despreading) спектра физических каналов;
• частотная и временная синхронизация;
• измерение параметров канала и управление мощностью излучения по замкнутой петле;
• взвешивание и комбинирование физических каналов;
• радиочастотная обработка сигналов.
В дальнейших подразделах некоторые из названных функций расшифровываются и освещаются с большей детальностью, однако вначале следует прокомментировать смысл классификации каналов, принятой в документах 3GPP и несколько расходящейся с характерной, например, для стандарта GSM (см. ~ 10.2).
Понятие "логический канал" относится к уровням выше физического и отражает содержание данных, предназначенных для передачи (обмен сообщениями с потребителем или команды управления). Термин "транспортный канал" относится к способу и формату данных, передаваемых далее по физическим каналам. В свою очередь, специфические частота и кодовая последовательность, обеспечивающие соединение между БС и МС, задают тот или иной физический канал. Как можно видеть, информация, структурированная в транспортных каналах, далее проектируется на физические каналы, по которым передается "вниз" и "вверх".
Укажем еще один классификационный признак, относящийся как к физическим, так и транспортным каналам UMTS: и те и другие делятся на выделенные (dedicated) и общие (common). Выделенные транспортные каналы (по одному на каждого пользователя) содержат данные обмена между конкретным потребителем и сетью, а также сигналы управления, тогда как общие транспортные каналы служат для передачи системной информации, данных о конфигурации сети и параметрах соты, сигналов вызова, пакетных сообщений и др. Смысл аналогичной классификации физических каналов будет ясен из дальнейшего изложения.
Все физические каналы имеют стандартизованную временную структуру [39, 40, 64]. Каждый канал делится на кадры длительностью 10 мс (38 400 чипов). Каждый кадр состоит из 15 слотов, имеющих длительность 666,6... мс (2560 чипов). Распределение данных между слотами и в пределах слота варьируется в зависимости от типа физического канала и текущей скорости передачи данных.
12.2.3. Выделенные физические каналы линии "вверх"
Выделенный физический канал используется потребителем на монопольной основе. Существует два типа выделенных физических каналов на линии "вверх": канал данных DPDCH (dedicated physical data channel) и канал управления DPCCH (dedicated physical control сhаппеl) . DPDCH используется для передачи данных выделенного транспортного канала, в то время как DPCCH передает от МС к БС информацию служебного назначения: биты пилот-сигнала, необходимого для оценки текущих параметров трассы между данным МС и БС и когерентного детектирования, команды управления мощностью излучения БС по замкнутой петле и др. Канал управления DPCCH для данного пользователя всегда единственный, тогда как каналов данных DPDCH может быть несколько: единственный выделенный транспортный канал может отображаться параллельно на несколько (до 6) физических с целью увеличения скорости передачи (мультикодовая передача). Идентификационным признаком каждого из выделенных физических каналов (будь то DPDCH или DPCCH) является один из канализирующих кодов, ансамбль которых описывается ниже в 12.2.5.
В случае использования данным потребителем единственного DPDCH объединение последнего с обязательно присутствующим каналом управления DPCCH происходит в квадратурном модуляторе, причем DPDCH подается в синфазную а DPCCH — в квадратурную (Q) ветвь последнего. Предварительно каждый из этих каналов, представляющий битовый поток в форме двуполярного сигнала, перемножается со своим канализирующим кодом, а затем взвешивается соответствующим множителем (для DPDCH, для DPCCH), с тем чтобы канальные мощности соответствовали разным (при необходимости) требованиям к качеству приема пользовательского сообщения и данных контроля. Наибольший из коэффициентов всегда поддерживается равным единице, нулевое значение означает отключение соответствующего канала, а промежуточные значения равномерно заполняют интервал (0,1) с шагом 1/15. Изменение весов может происходить от одного кадра к другому.
Если потребитель вовлекает в работу более одного DPDCH, все они взвешиваются одним и тем же множителем Д и равномерно распределяются между ветвями модулятора. Таким образом, все параллельно действующие DPDCH абсолютно равноправны. Сказанное иллюстрирует рис. 12,1, где канализирующий код, соответствующий i- му выделенному каналу данных (DPDCH;, i = 1, 2, ..., 6) обозначен как КК, а код, формирующий физический канал DPCCH, — как КК,

12.2.4. Общие физические каналы линии "вверх"
Общие физические каналы отличаются от выделенных тем, что их ресурс предоставлен в распоряжение сразу всем МС. Cyществует два типа общих каналов линии "вверх": канал случайного доступа RACH (random access channel) и канал пакетной передачи CPCH (common packet channel), причем эта классификация идентична и для физических, и для транспортных каналов с соответствующим проектированием вторых на первые. Канал RACH служит для инициирования контакта с сетью со стороны МС (например, вызова) и для передачи коротких пакетных сообщений, тогда как основная пакетная связь между MC и сетью осуществляется через канал CPCH.
Физический канал случайного доступа PRACH (physical RACH) содержит преамбулу протяженностью в 4096 чипов. Преамбула представляет собой 256 раз повторенный идентификатор (signature) из 16 чипов [41, 65]. МС может начать передачу по каналу PRACH в начале любого из 15 специальных слотов доступа, имеющих протяженность 5120 чипов каждый и совместно занимающих два кадра. Диаграмма этих слотов задается в формате передачи БС, для чего предусмотрен специальный широковещательный транспортный канал ВСН (broadcasting channel) линии "вниз". Таким образом, работа канала PRACH соответствует известному протоколу ALOHA со "слотированием" (slotted ALOHA) [57]. После приема преамбулы БС сигнализирует МС о наличии контакта и МС передает сообщение, занимающее отрезок в 10 или 20 мс (один или два кадра). Поскольку связь по каналу PRACH с каждой МС весьма кратковременна, управление мощностью по замкнутой петле в нем стандартом не предусмотрено.
Структура физического канала пакетной передачи PCPCH (physical CPCH) во многом аналогична, однако часть, отводимая на передачу сообщения, может занимать несколько кадров, а преамбульная часть дополнена специальной вставкой (4096 чипов), служащей для обнаружения коллизий (CD-P — collision detection preamble), т.е. попыток одновременного использования канала несколькими МС. Кроме того, в PCPCH, как и в выделенных пользовательских каналах, присутствуют сигналы управления мощностью по замкнутой петле, а также отдельная часть преамбулы PC-P (power control preamble), занимающая от 0 до 8 слотов. Последняя является необязательной и может быть активизирована БС для ускорения сходимости процедуры регулировки мощности.
Как и в выделенных каналах, в PRACH и PCPCH можно различать два типа потоков данных: собственно информационный и команды управления. Для их мультиплексирования друг с другом используется тот же вариант квадратурного уплотнения с предварительным взвешиванием, что и для объединения DPDCH DPCCH. Для мультиплексирования общих каналов с выделенными используются канализирующие коды, рассматриваемые в следующем подразделе.
12.2.5. Канализирующие коды линии "вверх"
Поскольку каждая МС может использовать для передачи несколько выделенных каналов данных DPDCH, необходимы меры, гарантирующие их разделимость в приемнике БС. Так как все сигналы, передаваемые одной МС, привязаны к единой времен- ной шкале, задаваемой стандартом частоты МС, иначе говоря, строго синхронизированы, разделение каналов можно реализовать как синхронное кодовое уплотнение на основе ортогональных канализирующих годов. В этом отношении линия "вверх" UTRAN несколько напоминает линию вниз стандарта IS-95 (см. ~ 11.2), однако к подобной ассоциации следует подходить с осторожностью, так как разделение сигналов абонентов в рассматриваемой линии по-прежнему остается асинхронным кодовым.
Формат канализирующих кодов в документах КОРР. [40, 41, 59, 64 — 67] описан с помощью двоичного кодового дерева, т.е. итерационного алгоритма. На каждой итерации любое кодовое слово, полученное на предыдущем шаге, преобразуется в два новых удвоенной длины путем двукратного повторения в одном слове и повторения с изменением знака — в другом. Так, если С— слово, полученное на k-м шаге, его "потомками" на k+1-м будут слова вида (С, С), (С, -С„). Таким образом, стартуя с тривиального слова длины 1, равного единице, за k итераций можно получить 2 кодовых векторов длины N = 2", ортогональность которых очевидна (см. рис. 12.2 для k = 3).
В спецификации описанная кодовая конструкция фигурирует под особым названием "ортогональные коды с переменным расширением спектра" (orthogonal variable spreading 1ас1ог— OVSF), хотя неясно, с какой целью введено столь громоздкое наименование, если учесть, что соответствующий алгоритм есть не

что иное, как популярное правило Сильвестра построения матриц Адамара с элементарным переупорядочиванием строк [68]. Paзумеется, получаемые при этом кодовые слова есть попросту функции Уолша.
Для организации выделенного канала управления DPCCH всегда используется кодовое слово длины N = 256, состоящее из одних единиц. Для каналов же данных DPDCH могут использоваться различные длины кодовых слов в соответствии с реализованным в UTRAN принципом управляемой скорости передачи. Так как длительность одного чипа зафиксирована, изменение скорости передачи, т.е. длительности одного бита, автоматически пропорционально меняет соотношение между длительностью бита и чипа (коэффициент расширения спектра SF — spreading factоr). Если потребитель использует только один канал данных DPDCH, он может варьировать SF в пределах от 256 (самая низкая скорость передачи) до 4 (самая высокая в рамках единственного DPDCH). При этом всегда используется кодовый вектор с номером /=SF/4, если отсчет на дереве вести сверху вниз. Понятно, что минимальное расширение спектра N = SF = 4 отвечает скорости передачи R, = (3,84/4) 10' = 0,96 Мбит/с. (Скорость передачи полезной информации примерно вдвое ниже вследствие применения мощных корректирующих кодов.) В тех случаях, когда подобная скорость оказывается недостаточной, МС может использовать до 6 параллельных DPDCH обязательно с одним и тем же (минимальным) расширением; N = SF = 4, причем правило выбора канализирующих кодовых слов для каждого числа каналов от 1 до 6 жестко регламентировано спецификацией.
Для мультиплексирования общих каналов PRACH и PCPCH с выделенными DPDCH и DPCCH используются кодовые слова, алгоритм выбора которых на кодовом дереве также оговорен спецификацией [66].
Достаточно дискуссионной является работоспособность линии "вверх" при столь малом коэффициенте расширения спектра, как SF = 4. Дело в том, что при применении на БС стандартного корреляционного приемника мощность асинхронной помехи от других потребителей (помехи множественного доступа) ослабляется за счет сжатия спектра именно в SF раз (см. 5.3). Ясно, что для эффективного подавления упомянутой помехи требуются гораздо большие значения SF, чем 4. В материалах 3GPP не удается обнаружить каких-либо внятных разъяснений по этому поводу. Одна из гипотез, объясняющих введение стандартом малых значений SF (4, 8, ...), может состоять в том, что они предусматриваются для специфических условий, практически исключающих появление взаимной помехи (например, в микросоте сети внутри помещения). Другое предположение: их применение возможно тогда, когда БС располагает так называемым многопользовательским (multiuser) приемником, потенциально обеспечивающим выигрыш в степени нейтрализации помехи множественного доступа по сравнению с традиционным корреляционным [40, 41]. До недавних пор подобные приемники считались чересчур сложными в реализационном плане, однако ныне, по- видимому, уже вполне уместно говорить об их практических перспективах (см. 12.5).
12.2.6. Скремблирование в линии "вверх"
Завершающим шагом в расширении спектра и реализации кодового разделения в линии "вверх" является скремблирование, т.е. перемножение мультиплексированного сигнала МС со специфическим для каждой МС скремблирующим кодом, играющим роль идентификатора (сигнатурной последовательности) МС. Разумеется, критерием отбора подходящих сигнатурных кодов для МС служит их слабая корреляция, обеспечивающая разделение сигналов различных МС приемником БС (см. g 5.3.3). Спецификацией предлагаются два возможных формата скремблирования в линии "вверх": длинные и короткие коды.
Длинные коды предусмотрены для случая, когда в приемнике БС применяется алгоритм многолучевого разнесения RAKE [66, 67] (см. также ~ 6.2). Каждая из скремблирующих последовательностей при этом представляет собой код Голда [34, 69] длины L = 2 -1, усеченный до 38 400 чипов, т.е. длины одного кадра. На- 25 помним алгоритм формирования ансамбля последовательностей Голда. Каждая из них может быть получена суммированием по мо- дулю 2 двух специально подобранных М-последовательностей од- ной и той же длины L = 2'-1, где и — память, равная числу ячеек регистра сдвига с линейной обратной связью, генерирующего каждую из М-последовательностей. Схема соединений в петле обратной связи регистра определяется полиномом степени и с коэффициентами из двоичного поля Галуа GF(2). Полиномы 25-й степени, обозначенные в спецификации [41, 66]:
Поэлементное суммирование полученных М-последовательностей по модулю 2 дает последовательность Голда. Циклический сдвиг перед сложением первой М-последовательности на один чип приведет к формированию иной последовательности Голда. Сдвиг на два чипа породит третью последовательность Голда и т.д. Таким образом можно получить L =2" — 1 различных последовательностей длины L. Еще две последовательности Голда — это сами исходные М-последовательности. Таким образом, общий объем ансамбля Голда равен L+2=2 +1, т.е. в случае п =25 превышает 2". Разумеется, чтобы использовать полученные последовательности (как и любые другие, состоящие из символов 0, 1) для модуляции высокочастотного колебания, следует перейти к действительным символам+1 по правилу: 0-э+1, 1-+ -1.
Основное достоинство ансамбля Голда по сравнению с другими — оптимальность его периодических корреляционных свойств [34]. Однако вследствие усечения длины до И = 38 400 это преимущество полностью теряется, и единственным оправданием предпочтения именно ансамбля Голда может служить простота и регулярность правила формирования очень большого числа (не меньшего 2~'+1) последовательностей. Каждая скремблирующая последовательность жестко синхронизирована с временной сеткой МС, так что начало кадра совпадает с первым символом кодовой последовательности Голда, периодически повторяемой в каждом кадре.
Бинарная последовательность Голда с символами +1 далее преобразуется
в четырехфазную. Смысл подобного перехода состоит в
выравнивании мощностей в квадратурных каналах модулятора в результате
скремблирования. Дело в том, что квадратурное мультиплексирование выделенных
канала данных и канала управления (см. 12.2.3) предваряется взвешиванием, так
что мощности квадратурных компонентов в мультиплексированном сигнале могут
многократно отличаться. Сказанное иллюстрируется рис. 12.3, а,
где показаны 4 возможных состояния сигнального вектора, отвечающие 4 комбинациям
знаков квадратур, имеющих разный уровень. Допустим теперь, что подобный
сигнал перемножается со случайной четырехфазной последовательностью, имеющей
постоянную амплитуду и равную вероятность появления любого из четырех возможных
символов +1, +j. Тогда любая из 4 точек на рис. 12.3, а (например, 1) с равной
вероятностью

остается на месте, переходит в противоположную или смещается на +90' (рис.12.3, б). В итоге диаграмма состояний сигнального вектора принимает вид рис. 12.3, в, демонстрирующего полную равноправность квадратурных компонентов. Разработчики стандарта сочли подобную балансировку полезной, чем и обосновали переход к четырехфазному скремблированию".
Операция скремблирования как таковая осуществляется в квадратурном
модуляторе путем комплексного перемножения мультиплексированного сигнала со
скремблирующим кодом.

Механизм образования комплексного скремблирующего кода, определенный спецификацией, состоит в следующем [66]. Бинарная усеченная последовательность Голда задает непосредственно действительную часть скремблирующего кода C(i). Та же исходная последовательность Голда (до усечения) берется со сдвигом в 16 777 232 чипа, после чего производится ее усечение до необходимой длины N = 38 400. У полученной таким образом последовательности С'(/) все нечетные символы заменяются на инверсии предыдущих четных (в некоторых источниках [40, 70] эта операция безосновательно названа децимацией). Произведение результата с действительной частью C(i) и используется в качестве мнимой компоненты. Полученный тем самым четырехфазный скремблирующий код формально записывается как .Столь громоздкая процедура построения скремблирующего кода задумана с единствен- ной целью: вдвое уменьшить частоту переходов QPSK-сигнала в противоположное состояние и облегчить тем самым энергетический режим передатчика (см. 4.2). Непосредственная проверка показывает, что при переходе от четных позиций к нечетным знаки действительной и мнимой частей не могут меняться одновременно, что и означает смену сигнального вектора на соседний, т.е. поворот на угол +90'(см. рис. 4.2).
Короткие скремблирующие коды длины 256 отведены стандартом для случаев, когда на БС применен более продвинутый, многопользовательский (multiuser) приемник. Длинные скремблирующие коды существенно усложнили бы структуру последнего, в связи с чем и предложена альтернатива коротких последовательностей длины И = 256. Отдельная такая последовательность получается путем суммирования по модулю 4 рекуррентной четверичной последовательности над кольцом вычетов по модулю 4 (Z4), задаваемой полиномом
Полученная четверичная последовательность D(i) длины N = 255 расширяется на один элемент: D(255) = D(0), после чего расщепляется на две бинарные последовательности C(i), С'(i) по правилу, заданному в спецификации табл. 12.1.
После этого бинарные последовательности C(i), С'(i) преобразуются в комплексный скремблирующий код согласно (12.1), как это было и в случае длинных кодов.

Скремблирующие коды "изолируют" друг от друга не только сигналы различных МС, но и каналы общего пользования (PRACH, PCPCH) от выделенных (DPDCH, DPCCH). Детали формирования скремблирующих кодов для общих каналов, а также алгоритмы сопоставления конкретных последовательностей тем или иным каналам, помимо спецификации [66], можно найти в [41].
12.2.7. Транспортные каналы линии "вниз" и их отображение
на физические
Информация, передаваемая сетью исключительно данному пользователю, на транспортном уровне оформлена в виде единственного выделенного канала DCH (dedicated channel). На физическом уровне в зависимости от содержания передаваемого сообщения ему, как и в линии "вверх", отвечают два выделенных канала — данных DPDCH и управления DPCCH.
Номенклатура общих транспортных каналов в линии "вниз" заметно шире, чем в противоположном направлении. В нее, в частности, входят уже упоминавшийся широковещательный канал ВСН, несущий информацию, относящуюся к системе или соте в целом и адресованную всем МС данной соты; канал доступа FACH (forward access channel), по которому БС передает командную информацию МС, местоположение которой БС знает; канал вызова PCH (paging channel), используемый для передачи команд МС с неизвестной локализацией; групповой канал DSCH (downliink shared сhаппеl) для связи БС с несколькими МС.
Физический слой каналов связан с транспортным следующими соответствиями [41]: для передачи ВСН используется первичный общий физический канал управления P-CCPCH (primary common control physical channel); FACH отображается во вторичный общий физический канал управления S-CCPCH (secondary common control physical channel); передача данных PCH осуществляется частично тем же физическим каналом -CCPCH, а частично каналом синхронизации SCH (synchronization channel). Что же касается группового транспортного канала, его информация передается по шести физическим каналам, перечисление которых вряд ли целесообразно в данном контексте.
12.2.8. Организация физических каналов линии "вниз"
Механизм мультиплексирования выделенных каналов DPDCH и DPCCH в рассматриваемой линии иной, чем в линии "вверх": каждый слот разбит на несколько окон, каждое из которых отведено для передачи либо данных, либо команд управления. Такой вариант разделения каналов был отвергнут для линии "вверх" по причине того, что данные могут передаваться не всегда, т.е. в какие-то промежутки времени DPDCH может быть попросту выключен. При этом передача команд управления по ОРССН не прекращается, и, следовательно, при временном уплотнении DPDCH и DPCCH излучение приобретает прерывистый характер, создающий чувствительные помехи близкорасположенным радиоэлектронным приборам (например, слуховым аппаратам). Подобное явление нередко отмечается при пользовании терминалами стандарта GSM. Для БС же этот фактор гораздо менее значим, поскольку вблизи ее антенны не могут находиться устройства, столь чутко реагирующие на прерывистое из- лучение, чем и объясняется выбор упомянутого механизма мультиплексирования в линии "вниз".
Другое отличие физических каналов линии "вниз" состоит в применении квадратурной (а не бинарной) ФМ для передачи ин- формации в каждом из каналов связи с МС. При этом исходный двоичный поток данных расщепляется в демультиплексоре DMX на два параллельных, так что четные биты поступают в синфазное (/), а нечетные — в квадратурное (Q) плечи модулятора ФМ4 (рис. 12.5).
После перемножения с канализирующим кодом КК результаты, интерпретируемые как действительная и мнимая компоненты комплексной величины, перемножаются со скремблирующим кодом так же, как это делается в линии "вверх" (см. рис 12.4).

12.2.9. Канализирующие коды линии "вниз"
Если БС использует только один выделенный канал данных для связи с определенной МС, этот канал в паре с выделенным управления задается посредством соответствующего канализирующего кода. Канализирующий код является уникальным, отличающим данную МС от других. В тех случаях, когда для увеличения скорости БС передает сообщение данной МС по нескольким каналам сразу, канализирующие коды этих каналов должны быть различными (ортогональными) и, разумеется, не могут быть использованы в линии "вниз" для связи с другими МС. Отметим, что в этом случае (мультикодовая передача) командная составляющая DPCCH передается лишь по одному из параллельно занятых физических каналов, причем скорость передачи по DPDCH, а значит, и расширение спектра во всех этих каналах одинаковы.
Для разделения общих физических каналов с выделенными и между собой также используются ортогональные канализирующие коды. Полное семейство канализирующих строится с помощью алгоритма, описанного ранее для линии "вверх", т.е. представляет собой ансамбль функций Уолша или OVSF по терминологии спецификации. Диапазон возможных расширений спектра в линии "вниз" — от 4 до 512.
Отметим, что при работе с разными скоростями в различных каналах приходится использовать канализирующие коды с разным значением расширения спектра. Опираясь на алгоритм построения кодов и рис. 12.2, можно видеть, что кодовые слова с разным расширением спектра (попросту разной длиной) сохраняют ортогональность на минимальной из длин лишь в случае, когда ни одно из них не является потомком другого. Как можно понять, процедура присвоения тех или иных кодовых слов физическим каналам в линии "вниз" гораздо серьезнее, чем в линии "вверх". В самом деле, каждая МС имеет в своем монопольном распоряжении все дерево в целом, поскольку одна МС отделена от другой уникальным законом скремблирования. В линии же "вниз" скремблирующий код для всех МС данной соты один и тот же и служит для разделения сигналов лишь между различными БС. Таким образом, вся тяжесть обеспечения внутрисотовой емкости ложится целиком на канализирующие коды. В связи с этим управление кодовым ресурсом в прямом канале оказывается сложной динамической задачей, решаемой на уровне координации работы всей сети.
12.2.10. Скремблирование в линии "вниз"
Как уже говорилось, скремблирующие коды линии "вниз" служат для разделения сигналов различных БС. Исходным материалом для них служат бинарные последовательности Голда. Две специально выбранные М-последовательности одинаковой длины строятся на основе полиномов
После поэлементного суммирования по модулю 2 пары таких последовательностей, взятых с некоторым взаимным сдвигом, получается одна из последовательностей Голда длины. Хотя максимальное количество получаемых таким образом последовательностей Голда равно L = 2 — 1 = 262143, стандартом предусмотрено использование только 2 = 8192 из них. Из всех разрешенных последовательностей вырезаются два сегмента длины 38 400: начальный и сдвинутый на 2' = 131072 символа, преобразуемые далее в последовательности символов +1 по правилу. Первая из них C(i) используется как действительная, а вторая С'(i) как мнимая часть четырехфазного скремблирующего кода C(i)+ j C'(i) в модуляторе рис.12.4.
В спецификации установлена строгая иерархия применяемых скремблирующих кодов. Прежде всего, 8192 кода систематизированы в 512 множеств, каждое из которых состоит из одного первичного и 15 вторичных кодов. Все первичные коды разбиты на 64 группы по 8 кодов в каждой. Каждой БС приписывается только один первичный код. Для некоторых физических каналов (к примеру, Р-CCPCH) допускается использование только первичного кода, тогда как другим разрешено использовать как первичный, так и вторичные коды [41, 66].
Канал синхронизации играет исключительно важную роль в архитектуре линии "вниз", так как с его помощью МС осуществляет инициализацию: поиск соты и определение границ кадров и слотов в формате передачи БС. Фактически канал является совокупностью двух подканалов: первичного и вторичного. Сигналы, передаваемые и по первичному, и по вторичному каналам синхронизации, не подвергаются скремблированию либо перемножению с канализирующим кодом, поскольку этап инициализации имеет место до того, как МС получает сведения о конкретном скремблирующем коде БС, обслуживающей зону присутствия МС.
Сигналы первичного и вторичного каналов синхронизации занимают начальные 256 чипов каждого слота. При этом первичный синхросигнал идентичен не только в каждом слоте, но и для всех БС. Поэтому, выполняя поиск первичного сигнала, МС не имеет возможности выбора той или иной БС: с которой из них удалось войти в контакт, выяснится лишь по завершении синхронизации. После захвата первичного синхросигнала МС знает границы слотов, но не знает границ кадра. Поэтому на втором этапе синхронизации осуществляется выбор между 15 (по числу слотов в кадре возможными рассогласованиями временных шкал МС и БС). Для этого используется вторичный канал синхронизации, сигнал которого имеет период в 15 слотов (1 кадр). Закон формирования вторичного синхросигнала является специфическим для каждой БС и жестко привязан к одной из 64 групп первичных скремблирующих кодов (см. 12.2.10). Таким образом, после окончания второго этапа синхронизации МС в состоянии опознать, какая из упомянутых групп используется найденной БС, а затем, проверяя 8 гипотез о конкретном скремблирующем коде в данной группе, устранить и эту неопределенность.
Первичный синхронизирующий код PSC (primary synchronization code) определен спецификацией как 16-элементная последовательность [41, 66]
а =(1,1,1,1,1,1,-1,-1,1,-1,1,-1,1,-1,-1,1),
повторенная 16 раз в прямом или инвертированном виде, т.е. как — а, согласно закону
С рс = (а, а, а, — а, — а, а, — а, — а, а, а, а, — а, а, — а, а, а),
в результате чего получается последовательность длины 256.
Вторичные синхрокоды строятся на базе шаблона z длины 256, составленного аналогично первичному синхрокоду [41, 66]. Для этого 16-элементная последовательность
b =(1,1,1,1,1,1,-1,-1,-1,1,-1,1,-1,1,1,-1),
совпадающая с а в первых восьми символах и с инверсий а — во вторых, манипулируется по правилу
z = (b,b,b,— b,b,b,— b,— b,b,— b,b,— b,— b,— b,— b,—
b) .
Некоторые из решений, относящихся к каналу синхронизации, провоцируют сомнения в их безальтернативности. Так, первичный синхрокод в силу своего назначения должен иметь достаточно малые боковые лепестки автокорреляционной функции, что неизменно отмечается в литературе как доминирующий критерий его выбора [39, 41, 58). Подобное требование многократно усиливается, если принять во внимание, что для всех БС этот код одинаков, и потому боковые лепестки сторонних синхросигналов, "скользящих" относительно данного вследствие асинхронности сети, будут создавать дополнительные помехи процедуре поиска соты. Между тем, никакими оптимальными свойствами АКФ рекомендованного синхрокода не обладает, имея максимальные боковые лепестки, равные четверти основного (см. рис. 12.6, а). При длинах, близких к 256, можно найти множество гораздо лучших кодов [71]. Для примера на рис. 12.6, б приведена апериодическая АКФ бинарного кода длины 256, полученного удалением одного символа из последовательности Лежандра длины 257. Максимальный боковой лепесток этого кода равен 3/64 от основного, т.е. более чем впятеро ниже, чем у кода из спецификации. Некоторые авторы подчеркивают, что каскадная структура избранного кода способствует заметному упрощению согласованного фильтра в приемнике МС [40, 58], уклоняясь, однако, от сколько-нибудь убедительной количественной аргументации.

Не вполне адекватным можно счесть и выбор вторичных синхрокодов. Хотя это явно в спецификации не указывается, по таблицам, приведенным в ней [39, 66], легко устанавливается, что вторичные синхрослова взяты из (15,3) кода Рида — Соломона, т.е. имеют минимальное расстояние Хэмминга, равное 13. С учетом ортогональности 16-ричных символов это без затруднений пересчитывается в выбросы периодических авто и взаимных корреляций вторичных синхросигналов, равные 2/15 от основного пива. Вместе с тем несложный подсчет показывает, что используемая размерность пространства сигналов 256х15 вполне достаточна для достижения полной ортогональности любой из 64 синхропоследовательностей как собственным нетривиальным циклическим сдвигам, так и всем сдвигам любой другой последовательности (общее число векторов 64x15 меньше размерности пространства 256x15).
12.2.12. Процедуры физического уровня UMTS
Функции физического уровня осуществляются как ряд процедур: быстрое управление мощностью, случайный доступ, вызов, измерения, связанные с эстафетной передачей, разнесение при передаче с БС и др. Остановимся кратко на некоторых из них,
отсылая читателя за деталями к оригиналу спецификации [67] и имеющимся публикациям [39 — 41, 58].
12.2.12.1. Быстрая замкнутая петля управления мощностью
По этой петле, называемой также внутренней, БС посылает команды МС на увеличение или уменьшение мощности сигнала, передаваемого последней. Жесткая регламентация мощностей МС является принципиальной для любых СОМА радиоинтерфейсов (см. Я 5.2, 6.1, 11.4), поскольку без таковой требования к линейному диапазону приемника БС оказались бы нереалистичными: разница мощностей сигналов от ближних и дальних МС могла бы превысить 100 дБ, и малейшая нелинейность приемника БС привела бы к подавлению слабого сигнала сильным (проблема "ближний — дальний" — near — far). Поэтому контур быстрого управления мощностью поддерживает для каждой МС уровень излучения, обеспечивающий заданное (целевое) отношение сигнал- помеха на входе приемника БС.
Команды по петле передаются в каждом слоте, т.е. с частотой 1500 Гц. Каждая команда увеличивает или уменьшает мощность на 1 дБ, однако возможно увеличение шага до 2 дБ. Если требуется изменение мощности менее чем на 1 дБ, то это достигается пропуском команды в данном слоте без изменения истинного шага регулирования.
Целевое отношение сигнал-помеха может устанавливаться разным в зависимости от конкретных условий приема в данной соте и динамики потребителя. Установка его относится к ответственности отдельной, так называемой внешней (outer) петли и координируется на уровне управления сетью.
12.2.12.2. Открытая петля управления мощностью
В открытой (Open — не путать с внешней!) петле МС изменяет мощность передатчика не по команде БС, а автономно в зависимости от уровня сигнала, принятого от БС: если этот уровень велик, МС делает вывод о том, что расстояние до БС мало и собственная излучаемая мощность должна быть малой и наоборот. Точность измерения мощности приемником МС, естественно, невысока (см, раздел 6.1), к тому же из-за различия частот линий "вниз" и "вверх" условия распространения в них неодинаковы, так что открытая петля выполняет весьма грубую регулировку с шагом+9 дБ.
Отметим, что, в отличие от cdmaOne, открытая петля UMTS функционирует не параллельно с замкнутой, а лишь до того как МС инициирует работу по каналам случайного доступа (RACH) или общему пакетному (СРСН). Это сделано потому, что замкнутая петля имеет значительно более высокое быстродействие и в состоянии реагировать на достаточно глубокие флюктуации условий распространения сигнала.
Работа канала вызова РСН (paging сЬаппе1) организована следующим образом. Любой терминал, однажды зарегистрировавшийся в сети, приписывается к некоторой группе вызова. Для каждой группы имеется индикатор вызова, передаваемый периодически по специальному каналу индикаторов вызова PICH (pagingindicator channel) всякий раз, как только поступает вызов абонента данной группы. Терминал, зафиксировав присутствие сигнала вызова своей группы, в следующем кадре обращается к вторичному общему каналу управления S-ССРСН (см. 12.2.7), из сообщения которого узнает, адресован ли вызов именно ему. Подобная двухступенчатая процедура сочтена предпочтительной с точки зрения энергосбережения и продления срока службы батареи МС.
Под случайным доступом понимается вхождение МС в контакт с БС по инициативе первой. Поскольку открытая петля управления мощностью весьма неточна, а замкнутая еще не функционирует, МС вынуждена устанавливать стартовую мощность передатчика на низком уровне, чтобы не обострять проблему "ближний — дальний". Общая схема процедуры такова:
1) из сообщения широковещательного канала ВСН терминал узнает
скремблирующие коды доступных подканалов RACH случайного доступа и разрешенные
идентификаторы (signature);
2) терминал случайным образом выбирает один из разрешенных его группой доступа субканалов RACH и (также случайным образом) один из допустимых идентификаторов;
3) измеряется уровень принимаемого от БС сигнала и устанавливается начальная мощность излучения МС по каналу RACH с достаточным запасом на неточность измерений;
4) передается преамбула длительностью 1 мс вместе с идентификатором;
5) терминал декодирует сигнал в канале индикации захвата AICH (acquisition indication channel), передаваемый БС, чтобы узнать, принята ли посланная им преамбула;
6) если подтверждение захвата по каналу AICH не поступило, терминал увеличивает мощность передачи с шагом, кратным 1 дБ, и вновь посылает преамбулу и идентификатор;
7) по поступлении подтверждения MC передает 10 или 20 мс сегмент сообщения.
Коэффициент расширения спектра в части, отведенной на сообщение, может меняться от 32 до 256 в зависимости от избранной скорости. При максимальной скорости в течение 20 мс передается 1200 канальных символов, что с учетом применения кодов со скоростью порядка 1/2 соответствует 600 бит информации.
12.2.12.5. Общий пакетный канал CPCH
Общий пакетный канал, также предоставляющий ресурс всем МС на равноправной основе, отличается от канала случайного доступа RACH лишь тем, что по нему могут передаваться более длинные сообщения, занимающие несколько кадров. Вследствие этого увеличивается вероятность коллизии пакетов разных МС, для сигнализации об отсутствии которой БС использует специальный канал CD-ICH (collision detection indication channel). В остальном работа каналов CPCH и RACH имеет много общего.
Это процедура первоначальной синхронизации МС с сетью, стартующая с включением питания мобильного терминала. Она состоит из трех основных этапов.
1. Сразу после включения МС начинает поиск первичного синхросигнала PSC. Напомним, что PSC одинаковы для всей сети и не являются идентификаторами БС. Поскольку PSC повторяется в каждом слоте, по завершении этапа МС знает границы слотов.
2. На втором этапе МС устраняет неоднозначность относительно границ кадра и опознает группу первичных скремблирующих кодов, опираясь на вторичный синхросигнал SSC. Имеется 15x64 конкурирующих гипотез, поскольку в кадре содержится 15 слотов и общее количество различных SSC равно 64. Сопоставив отклики корреляторов (или согласованных фильтров) на все 15 циклических сдвигов всех 64 SSC, приемник МС принимает решение в пользу пары сдвиг — код, максимизирующей отклик. Так как SSC жестко синхронизирован с кадром и привязан к определенной группе первичных скремблирующих сигналов, завершив второй этап, МС знает границы кадра и группу скремблирующих кодов, приписанную БС, с которой МС вошла в контакт.
3. В каждой группе содержится 8 возможных первичных скремблирующих кодов, поэтому на третьем этапе МС проверяет 8 конкурирующих гипотез и по завершении этапа знает конкретный первичный скремблирующий код данной МС.
12.2.12.7. Эстафетная передача
Процедуры эстафетной передачи в UTRAN напоминают аналогичные в IS-95 (см. g 11.4.6) и делятся на три основные группы:
• внутри модовая (intra-mode);
•
межмодовая (inter-mode);
• межсистемная (inter-system).
Первая означает передачу МС от одной БС к другой, когда обе они работают в формате UTRAN с частотным дуплексом (FDD). При этом различают мягкую передачу (soft handover), т.е. параллельный контакт МС с несколькими БС с постоянным замещением одних БС другими на основе измерений интенсивностей их сигналов, более мягкую передачу (softer Иапг1очег) (в пределах соты между секторами) и жесткую передачу, типичным примером которой является переключение между БС, работающими на разных частотах.
Межмодовая передача подразумевает ситуацию, когда МС переходит из зоны действия БС, работающей в формате частотного дуплекса (FDD), в зону оператора, использующего времен- ной дуплекс UTRAN TDD.
Наконец, межсистемная передача означает кооперирование с системами второго поколения (в дальнейшем и с cdma2000), с тем чтобы один терминал имел возможность "бесшовного" переключения между ними со всеми последствиями в смысле расширения зоны охвата и свободы Роуминг.
Процедуры эстафетной передачи чрезвычайно сложны, особенно с учетом иерархии структуры сети (соты, секторы, микросоты, пикосоты), и дальнейшее обсуждение их тонкостей выходит за рамки настоящей книги.
12.3. Особенности радиоинтерфейса UMTS/TDD
Вариант UMTS с временным дуплексом TDD предусмотрен для тех регионов, в которых сложившееся распределение частот в диапазоне 2 ГГц не дает достаточной свободы для организации частотного разноса линий "вниз" и "вверх". Международным регламентом для 0МТЯЛОО отводятся так называемые непарные участки спектра: 1900...1920 МГц, 2010...2025 МГц в Европе, 1850...1910 МГц, 1930...1990 МГц в США. Хотя физические уровни версий UMTS с временным и частотным дуплексом вполне гармонизированы в том, что касается цифр: спектральных характеристик, диапазона скоростей передачи, частоты следования чипов, параметров кадра и т.п., — философия радиоинтерфейса TDD имеет мало общего с тем, о чем говорилось в предыдущем разделе. Отметим также, что интерпретации и анализу документов 3GPP, определяющих облик UMTS/TDD [72, 73], в имеющихся публикациях [39, 40, 58-61] отводится второстепенная роль, поскольку приоритеты безоговорочно отданы режиму FDD. Придерживаясь той же линии и не вдаваясь в детали, остановимся лишь на некоторых специфических аспектах построения радиоинтерфейса TDD.
Начнем с перечисления заимствований из варианта FDD: частота следования чипов расширяющих кодов — 3,84 Мчип/с; структура информационного потока — кадры длительностью 10 мс (38 400 чипов), разбитые на 15 слотов по 2560 чипов в каждом; канал синхронизации линии "вниз" имеет двухступенчатое построение с использованием прежнего первичного синхрокода и вторичного синхрокода, модифицированного несущественным образом.
Однако, в противовес FDD, рассматриваемый радиоинтерфейс не является системой с "чистым" кодовым разделением: в обоих направлениях разделение сигналов осуществляется на основе комбинации ТОМА и СОМА. Для этого данные распределяются по слотам последовательных кадров, так что БС передает данные, адресованные конкретной МС, лишь в некоторых определенных слотах некоторых определенных кадров. Последовательность всех таких слотов и кадров именуется пачкой — burst. Конфигурация пачки периодически повторяется с каждым супер кадром, охватывающим 72 кадра. В каждом слоте, помимо этого, используются канализирующие коды в виде функций Уолша (см. 12.2.5), однако только до длины 16. Таким образом, на долю кодового разделения приходится только 16 каналов, остальная часть абонентской емкости реализуется индивидуальным назначением слотов и кадров, т.е. временным разделением.
Временное дуплексирования осуществляется за счет резервирования части слотов кадра за линией "вниз", а оставшихся — за линией "вверх". Пример на рис. 12.7 показывает последовательность кадров, в которой i-й МС предоставлены тройки слотов в парах смежных кадров, повторяющихся с периодом 12, причем линии "вниз" отданы первый, второй и третий слоты, а линии "вверх" — восьмой, девятый, десятый.
Как можно понять, в рассматриваемом варианте радиоинтерфейса существуют три ресурса управления скоростью передачи в направлении индивидуальной МС (и обратно): число слотов в кадре, выделенное данному пользователю, а также (как и в варианте FDD) изменение коэффициента расширения (числа чипов на информационную посылку) и использование параллельных кодовых каналов (мультикодовая передача).
Другой особенностью радиоинтерфейса TDD является квазисинхронное построение линии "вверх". БС постоянно контролирует задержку сигнала от МС, посылаемого в ответ на запрос БС, и передает МС команду на "опережение" (timing advance), с тем чтобы сигналы разных МС были по возможности синхронными на входе приемника БС. На данном этапе допустимая погрешность

синхронизма сигналов МС установлена в пределах четырех длительностей чипа [58]. При подобных взаимных временных сдвигах функции Уолша одного периода утрачивают ортогональность, и поэтому на долю кодового разделения приходится уже только 4 канала (число разных периодов функций Уолша вплоть до 16). Однако имеется намерение в будущем довести точность совмещения сигналов на входе приемника БС до долей длительности чипа, что полностью уравняет линии "вверх " и "вниз" в плане возможностей применения синхронного кодового разделения [58].
12.4. Эволюция стандарта IS-95 в cdma2000
Входящий в семейство IMT-2000 стандарт cdma2000 воплотил в себе идею максимально гладкой эволюции системы cdmaOne в систему третьего поколения. Надо сказать, что базисные решения стандарта IS-95 оказались весьма жизнеспособными и гибкими в плане дальнейшего развития и совершенствования, что, кстати, ощущается и в идеологии системы UMTS.
Для увеличения скорости передачи системы с кодовым разделением без потерь или с выигрышем в абонентской емкости необходимо дальнейшее расширение спектра. Предусмотренная концепцией ЗО полоса в 5 МГц, согласно спецификациям 3GPP2 [58, 59, 74], может использоваться в одном из двух параллельных вариантов: традиционного прямого расширения спектра (DSSS) и многочастотном (multi-carrier — МС) . При прямом расширении частота чипов, принятая в IS-95, утраивается и составляет Зх1,2288=3,6864 Мчип/с. В многочастотном варианте используется передача на трех несущих сдвинутых на 1,25 МГц. Сигнал, передаваемый на каждой из несущих, подобен сигналу IS-95, т.е. образуется прямым расширением последовательностью чипов со скоростью 1,2288 Мчип/с и имеет полосу 1,25 МГц. При этом входной поток данных расщепляется на три параллельных потока втрое меньшей скорости, каждый из которых передается по своему каналу. Понятно, что многочастотная версия особенно удобна с точки зрения преемственности в отношении системы IS-95, имея в основе, по существу, дублирование каналов последней.

Примерные спектры сигнала для двух вариантов построения
радиоинтерфейса показаны на рис. 12.8, а, б.
Расширению спектра, разумеется, сопутствуют и другие преимущества. При прямом расширении автоматически улучшается разрешение многолучевых сигналов и тем самым повышается эффективность алгоритма RAKE (см. 6.2.2). Кроме того, благодаря увеличению емкости на сопредельных скоростях передачи появляются дополнительные возможности реализации антенного разнесения в линии "вниз" (transmit diversity [59]). При прямом расширении одни и те же данные могут быть канализированы различными ортогональными кодами и параллельно переданы через разные антенны, так что МС окажется в состоянии раздельно принять соответствующие сигналы и осуществить их комбинирование с целью нейтрализации эффектов замираний (см. ~ 6.2.1). При многочастотном режиме тот же результат может быть достигнут за счет передачи сигналов разных несущих разными антеннами.
Перечислим конспективно некоторые важные усовершенствования в организации физического уровня, отличающие cdma2000 от cdmaOne.
1. Для работы на прежних скоростях передачи (9,6/14,4 кбит/с или меньше) закреплен выделенный основной (fundатепtаl) канал передачи. При необходимости работы с более высокими скоростями в действие вводятся дополнительные (supplementary) каналы (до двух), организованные на базе ортогональных канализирующих кодов. Длина канализирующих кодов основных каналов постоянна, тогда как в дополнительных она подстраивается под требуемые скорости.
2. Некогерентный вариант линии от МС к БС заменен на когерентный, для чего организован обратный пилотный канал, позволяющий БС отслеживать частоту и фазу несущей каждой из обслуживаемых МС.
3. В системе-прототипе в прямом канале для передачи данных использовалась бинарная ФМ (хотя расширяющая последовательность была четырехфазной, см. 11.2.1). В cdma2000 формат информационной манипуляции изменен на КФМ. При этом длина посылки, а значит, и коэффициент расширения удваиваются, так что даже при использовании прежней полосы в 1,25 МГц он оказывается равным 128. Как видно, объем ансамбля канализирующих ортогональных кодов Уолша становится вдвое больше, что означает удвоение сотовой емкости.
4. В добавление к общему пилотному каналу линии "вниз" предусматриваются вспомогательные выделенные (по одному на МС), предназначенные для настройки антенной решетки с адаптивным формированием луча (smart antenna), осуществляющей пространственную селекцию индивидуальных МС или групп МС. Условия распространения в лучах такой антенны, направленных на разные МС, различны, поэтому точная их настройка по общему пилотному сигналу невозможна. Напомним в порядке сравнения, что в формате выделенных каналов системы UMTS присутствуют сигналы управления, выполняющие в числе прочих также и названную функцию.
5. Расширен диапазон применяемых методов канального помехоустойчивого кодирования. Так, помимо сверточных, для высокоскоростной передачи рекомендованы турбо-коды (см. 7.2). Уместно вновь провести параллель со стандартом UMTS, в котором содержатся аналогичные предписания.
6. Наряду с фиксированными соединениями cdma2000, как и UMTS, поддерживает пакетный сервис, для чего могут использоваться физические каналы и трафика, и управления (выделенные либо общие).
Подводя черту под кратким обзором систем третьего поколения,
подчеркнем, что их развитие дает пример чрезвычайно оперативного освоения
новейших телекоммуникационных технологий и беспрецедентных масштабов проникновения последних в коммерческий сектор электронной
связи.