Декадно-шаговые АТС
От знаний еще никто не умирал, но рисковать не стоит.
Из студенческого фольклора
Те читатели, которые всерьез исповедуют приведенный в качестве эпиграфа принцип, могут пропустить эту и следующую главы и сразу перейти к цифровой коммутации. Остальным хотелось бы напомнить, что всякие знания рентабельны, что заложенные Строуджером технические идеи интересны и сегодня, и, наконец, что миллионы абонентов ВСС России все еще обслуживаются станциями этой системы.
Коммутация в декадно-шаговых АТС производится под непосредственным управлением сигналов набора номера вызывающим абонентом, без использования каких бы то ни было централизованных управляющих устройств. Мы вернемся к отсутствию централизованного управления далее, при рассмотрении полностью распределенного программного управления в цифровых АТС типов S12, DX-200 и др. Но это — уже следующий виток спирали развития систем коммутации. Ведь декадно-шаговые АТС, в отличие от электронных, квазиэлектронных и даже координатных, вообще не обладали никаким интеллектом (за исключением, разве лишь, схемы совместного монтажа индивидуальных электромеханических искателей, определявшей структуру той или иной АТС). Каждая набираемая вызывающим абонентом цифра управляла одним искателем, и каждый искатель мог обслуживать всякий раз только один вызов.
Например, если вызывающий абонент набирает цифру «3», то искатель выполняет шаги вверх на три уровня, затем ищет свободный искатель из тех, которые подключены к выходам этого третьего уровня. Контакты останавливаются на выходе, соединенном с первым свободным искателем третьего уровня, и этот прибор принимает затем следующую набираемую цифру. Таким путем, абонент сам управляет выбором маршрута через всю станцию.
Электромеханический искатель состоит из трех основных частей:
• неподвижной части — контактного поля;
• подвижной части со щетками — для создания электрического контакта с нужными ламелями контактного поля;
• движущего механизма (привода) — для перемещения подвижной части в нужное положение и для возвращения ее в исходное положение.
Искатели, как вращательные, так и подъёмно-вращательные, с помощью которых производится искание всех видов, принято показывать на скелетных и принципиальных схемах в виде условных изображений, приведенных на рис. 2.1.
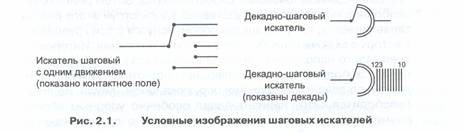
Декадно-шаговые АТС относят к первому поколению автоматических систем телефонной коммутации. Первые АТС этой системы появились еще в позапрошлом столетии. Примерами таких АТС, выпускавшихся отечественной промышленностью, являются рассматриваемые далее в этой главе городские АТС-47, АТС-54 и сельские АТС-100/500, в которых используются подъемно-вращательный искатель, получивший название ДШИ (декадно-шаговый искатель), и вращательный искатель ШИ-17 (шаговый искатель на 17 положений). Наша промышленность выпускала шаговые искатели прямого действия с одним круговым движением щеток и с контактным полем емкостью 10, 15, 25 и 50 линий, предусматривавшие коммутацию от четырех до восьми проводов и обозначавшиеся ШИ11, ШИ17, ШИ25 и ШИ50, соответственно. На ступени предварительного искания применяются вращательные шаговые искатели типа ШИ-11 (АТС-47) или ШИ-17 (АТС-54), а на станциях малой емкости типа МАТС-50/100 принято обратное предыскание с применением искателей ШИ-50.
Кроме декадно-шаговых, к АТС первого поколения относятся так называемые машинные» станции, которые производились в Советском Союзе с 1927 г. на заводе «Красная Заря» в Ленинграде. В машинных АТС для группы искателей предусматривается общий машинный привод, состоящий из нескольких постоянно вращающихся валов. Подвижная часть искателя приводится в движение при ее временном сцеплении с вращающимся валом.
Помимо привода, характерными особенностями автоматических станций машинной системы являются отказ от декадного построения контактного поля и обусловленное этим наличие регистра, то есть использование не прямого, а обходного принципа управления исканием. Своеобразны также конструкция искателя и принцип его работы. Как и подъемно-вращательный, машинный искатель совершает движение двух видов, но в нем имеются две подвижные части — базовый блок и размещенная на нем рейка со щетками. Базовый блок вращается (вынужденное движение), поворачиваясь на такой угол, чтобы рейка оказалась против того ряда струн контактного поля, в который включены линии направления, выбранного при вынужденном движении базового блока. Затем рейка начинает свободное поступательное движение вдоль струн этого ряда и останавливается, когда ее щетки соприкоснутся с той группой струн, в которую включена свободная в этот момент линия. Интересно, что очень часто использовался такой вариант искания, когда рейка, не найдя свободного выхода, совершала обратное движение и могла двигаться взад-вперед до тех пор, пока какая-нибудь из линий не освободится. Этот вариант давал особенно упорным абонентам возможность получить соединение в сильно перегруженном направлении, не набирая многократно один и тот же номер, а лишь держа трубку возле уха и терпеливо дожидаясь момента, когда нужное соединение будет, в конце концов, установлено.
Наиболее сложная и дорогостоящая часть машинного искателя— механическая. Контактное же поле искателя составляет небольшую долю его стоимости. Очевидные экономические соображения продиктовали выбор конструкции искателя с большой емкостью контактного поля, что дало возможность уменьшить общее количество искателей на АТС.
Как уже отмечалось в главе 1, первая декадно-шаговая АТС типа АТС-47 начала производиться на заводе «Красная заря» в 1947 году.
Характерной особенностью АТС-47 является применение на ступенях группового и линейного искания декадно-шаговых подъемно-вращательных искателей. Телефонный вызов, поступивший на вход группового искателя, может быть направлен к 10 разным группам искателей следующей ступени группового искания или к 10 разным сотенным абонентским группам, т.е. к 10 группам линейных искателей. Выбор группы происходит при вынужденном движении искателя, которым непосредственно управляют импульсы, передаваемые от телефонного аппарата при наборе номера абонентом. После того как группа выбрана (т. е. щетки искателя поднялись на нужную декаду), групповой искатель начинает свободное вращательное движение (т. е. свободное искание незанятой и доступной линии в группе), и доступность выходов при свободном искании тоже равна десяти. Отличие работы линейного искателя состоит в том, что импульсы набора, получаемые от аппарата абонента, управляют и подъемным, и вращательным движением щеток, этого искателя, в результате чего происходит выбор той из ста абонентских линий, включенных в его контактное поле, номер которой набрал вызывающий абонент.
К сожалению, простота и ясность декадного принципа искания удивительно быстро и на многие десятилетия затуманили головы работников эксплуатационных, проектных и научно-исследовательских организаций, сформировав в этих головах то, что весьма метко названо декадно-шаговым мышлением. Такое мышление до сих пор часто мешает рационально строить станции и сети, жестко привязывая их структуру и емкость к системе нумерации [118].
Как уже было отмечено, искатель, в общем случае, содержит три основные части: контактное поле, совокупность подвижных коммутирующих элементов и привод. В некоторых искателях, кроме того, имеются служебные контактные группы, выполняющие вспомогательные функции. Электромеханические искатели бывают щеточные и бес щеточные. Первые характеризуются наличием щеток, скользящих при своем движении по контактным ламелям. В таких искателях подвижные детали и контактные поверхности подвержены значительному износу. Чтобы обеспечить достаточную механическую прочность щеток и контактных ламелей, им придают большие размеры, что заставляет использовать относительно недорогие металлы, преимущественно бронзу, а потому их существенным недостатком является окисление контактных поверхностей. В бесщеточных искателях применяют точечные контакты давления, изготовленные из благородных металлов, что обеспечивает надежность и высокое качество коммутации. В этих искателях перемещение контактных пружин происходит либо непосредственно под действием магнитного потока, что имеет место в герметизированных контактах (язычковые реле, ферриды), либо под действием якоря электромагнита, как в электромагнитных реле, либо при помощи специальных приводных приспособлений, передающих к контактным пружинам усилие от электромагнитов, что находит применение в многократных координатных и кодовых соединителях.
Щеточные искатели различаются количеством щеток, видами их движения и системой привода. Щетки искателей могут иметь один или два вида движения (по прямой линии и по окружности). Привод щеточных искателей может быть электромагнитным, машинным или моторным. В шаговых электромагнитных искателях блок подвижных коммутирующих элементов передвигается шаг за шагом при каждом притяжении или отпускании якоря электромагнита. В машинных искателях аналогичный по назначению блок передвигается плавно при его сцеплении с общим для группы искателей валом, приводимым в движение постоянно действующим мотором. Тот же блок моторных искателей передвигается с помощью небольшого электрического мотора, входящего в конструкцию каждого искателя.
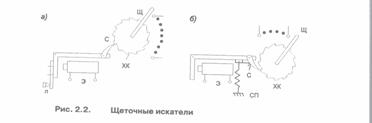
На рис. 2.2 приведены схемы построения щеточных искателей с круговым движением щеток, поясняющие принцип действия шагового электромагнитного искателя. На рис. 2.2,а показана схема шагового искателя прямого действия, а на рис. 2.2, б — обратного действия. Перемещение щеток шагового электромагнитного искателя происходит вследствие воздействия собачки С якоря движущего электромагнита Э на храповое колесо ХК, скрепленное с осью щеток Щ. Это воздействие может происходить либо при притяжении, либо при отпускании якоря; соответственно, различают шаговые электромагнитные искатели прямого и обратного действия. При одинаковой мощности электромагнита искатели обратного действия могут обеспечить несколько большую скорость работы, чем искатели прямого действия. Однако в производственном отношении более удобны искатели прямого действия, которые и нашли преимущественное распространение. Они обеспечивают скорость искания до 40 шагов в секунду.
Щеточные искатели наиболее просты и наиболее распространены. Их основными характеристиками являются емкость поля, т. е. число линий, которые могут быть включены в контактное поле, и проводность, т.е. число проводов, составляющих каждую из коммутируемых линий. Искатели, применяемые в АТС, имеют емкость поля от 2 до 500 линий и, в большинстве случаев, коммутируют три провода, из которых два (провода а и b) служат для передачи разговорных токов, управляющих и акустических сигналов, а третий (провод-с) — для пробы занятости и блокировки занятых линий, о чем еще будет сказано в конце этой главы.
2.3. Вынужденное и свободное искание. Ступени искания
От коммутаторов Строуджера пошли некоторые основные понятия систем коммутации. В первую очередь это понятие искания, под которым понимается процесс выбора требуемой линии или группы линий. Искание бывает вынужденное и свободное. Вынужденное искание представляет собой поиск определённой линии или определённого направления, т.е. пучка линий.
В структуре ДШ АТС имеются ступени искания трех видов: предварительного искания ПИ, группового искания ГИ и линейного искания ЛИ.
2.3.1. Предварительное искание
Предварительное искание (предыскание) производится только в режиме свободного искания и предназначается для подключения линии вызывающего абонента ко входу первой ступени ГИ. Каждая абонентская линия заканчивается на АТС абонентским комплектом (АК), состоящим из двух реле и предыскателя типа ШИ. Сто комплектов АК монтируются на одном стативе (ставив ПИ), и, таким образом, число стативов ПИ, устанавливаемых на АТС, равно числу сотенных абонентских групп.
Принцип предварительного искания, применение которого позволяет в несколько раз уменьшить число искателей на АТС, был впервые предложен российским изобретателем М.Ф. Фрейденбергом, запатентовавшим в 1895 г. первую в мире конструкцию предыскателя. При использовании принципа предварительного искания линия вызывающего абонента подключается к шнуровой паре АТС приборами предыскания. Наличие предварительного искания повышает использование основного станционного оборудования и, следовательно, снижает его стоимость.
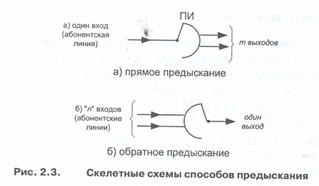
Для предыскания в декадно-шаговых АТС используются вращательные или подъёмно-вращательные искатели, с помощью которых может быть реализован любой из двух способов — прямое предыскание и обратное предыскание. Скелетные схемы обоих способов предыскания показаны на рис. 2.3.
Целесообразность применения прямого или обратного предыскания определяется путем технико-экономического сравнения.
Относительная экономичность того или иного способа зависит, в первую очередь, от затрат на оборудование (искатели и реле), суммарная стоимость которого зависит от нагрузки на одну абонентскую линию в ЧНН, от заданных норм качества обслуживания вызовов, от способа образования пучка приборов (ГИ или ЛИ) и от стоимости приборов.
Линии, имеющие высокое использование, например, соединительные линии от учрежденческих АТС и подстанций, могут подключаться непосредственно к приборам ГИ и ЛИ. Линии с малым использованием подключаются к соединительным устройствам АТС только через ступень предыскания.
При прямом предыскании в каждом абонентском комплекте имеется искатель ПИ небольшой емкости (на 10 — 15 выходов), который подключает линию вызывающего абонента к одному из свободных соединительных устройств, например, к ГИ. Количество предыскателей равно числу абонентов станции.
При полнодоступном включении линий в выходы предыскателя каждому источнику нагрузки (входу коммутационной схемы) доступны все соединительные пути. В такой схеме потери вызовов возникают лишь при занятости всех выходов.
При неполнодоступном включении линий каждому источнику нагрузки доступна лишь часть выходов ступени искания. Применять неполнодоступное включение приходится потому, что доступность D на ступени предыскания или группового искания обычно бывает меньше числа V выходов ступени. Потери вызовов в неполнодоступном пучке возникают при занятости всех выходов, доступных данному источнику нагрузки, хотя свободные выходы ступени в это время могут существовать. Поэтому для обеспечения заданных потерь при неполнодоступном включении необходимо большее число выходов, приборов, линий.
Если известна интенсивность поступающей нагрузки и задана норма вероятности потери вызова, количество линий в полнодоступном пучке определяется по формуле Эрланга. Для расчета полнодоступного пучка можно также пользоваться таблицами Г.П. Башарина, в которых табулирована формула Эрланга и по которым удобно определять вероятность потерь, если известна поступающая нагрузка и число линий. В случае ступенчатого неполнодоступного включения линий в выходы (при D=10) число приборов можно определять по таблицам Б. С. Лившица.
Для увеличения доступности применяют звеньевое включение.
Примером использования такого включения в шаговых АТС является двойное предыскание, которое обеспечивает значительно большую доступность, чем одинарное предыскание. В схемах одинарного предыскания доступность постоянна. Особенностью схем двойного предыскания является переменная доступность, т.е. количество ГИ, доступных линии абонента из некоторой подгруппы, зависит от числа вызовов, ранее возникших в этой подгруппе.
Линейное искание производится только в режиме вынужденного перемещения щеток искателя. В АТС ёмкостью до 10 номеров шаговый искатель выбирает линию вызываемого абонента, совершая вынужденное движение только одного вида — вращательное, а в АТС ёмкостью до 100 номеров декадно-шаговый искатель при выборе линии вызываемого абонента производит вынужденное движение двух видов — подъёмное движение для выбора той группы выходов, в которой находится нужная абонентская линия, и вращательное движение для отыскания самой этой линии.
Такое искание и называется линейным. Его цель — соединить определённый вход станции с определённым выходом, т. е. с определённой линией. Искатели, выполняющие линейное искание, называют линейными искателями (ЛИ).
Таким образом, ступень линейного искания (ступень ЛИ) выполняет индивидуальное искание и подключает свой вызывающий вход к вызываемой абонентской линии. Для каждой сотни абонентов предусматривается один ставив ЛИ, на котором для обслуживания всех вызовов, поступающих к этой сотне, может быть установлено до 20 ЛИ. Все контактные поля этих ЛИ за параллеливаются и подключаются к абонентским комплектам статива ПИ, обслуживающего ту же сотенную группу.
При установлении соединения в ЛИ передаются две последние цифры номера вызываемого абонента. Подъемное движение ЛИ определяется цифрой десятков, а вращательное движение — цифрой единиц, так что и то, и другое движение ЛИ является вынужденным.
Только после введения принципа группового искания стало возможным неограниченное расширение емкости телефонных сетей. Сущность группового искания заключается в том, что на АТС, емкость которой превышает емкость контактного поля искателей, все абонентские линии разбиваются на группы, число линий в каждой из которых равно емкости контактного поля искателя. Увеличение же емкости контактного поля ограничено принципом конструкции искателя и обусловленными этим стоимостными характеристиками. Предоставлять чрезвычайно дорогие устройства всего двум абонентам на всё время соединения между ними экономически неэффективно. Поэтому практическое применение в АТС нашли искатели с емкостью поля не свыше 500 выходов, а для выбора группы, в которой находится нужная линия, стали устанавливать специальные приборы, называемые групповыми искателями. Принцип группового искания также был предложен М.Ф. Фрейденбергом, запатентовавшим свое изобретение через год после патента на предварительное искание, в 1896 г.
Ступень группового искания (ступень ГИ) подключает свой вызывающий вход к одному из свободных выходов в направлении, определяемом поступившим на этот вход числом импульсов. Искание направления является вынужденным, искание выхода в направлении — свободным. В зависимости от емкости телефонной сети и нумерации абонентских линий в соединении двух абонентов участвует последовательно несколько ступеней ГИ.
Групповое искание производится с помощью групповых искателей, каждый из которых выполняет две функции: выбирает группу приборов следующей ступени искания (вынужденное искание) и отыскивает свободный прибор в выбранной группе (свободное искание). Объединяя с помощью ступеней ГИ нужное количество групп абонентских линий, можно обеспечить доступ любого ПИ к любой такой группе, т.е. строить станции большой емкости. Емкость каждой абонентской группы равна емкости поля ЛИ, а выбор нужной группы производится с помощью одной или нескольких ступеней ГИ, расположенных между ступенями ПИ и ЛИ. На каждой ступени ГИ ведется искание свободного коммутационного прибора, через который может быть установлено соединение с ЛИ, обслуживающим требуемую абонентскую группу.
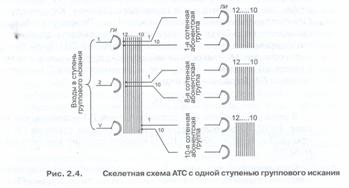
Одна ступень ГИ, построенная на декадно-шаговых искателях, позволяет объединить десять абонентских групп емкостью по 100 номеров, т.е. образовать станцию емкостью 1000 номеров. Скелетная схема объединения абонентских групп с помощью одной ступени группового искания показана на рис. 2.4. На ступени ГИ устанавливается kги, групповых искателей. Это число определяется в зависимости от величины поступающей телефонной нагрузки. Контактные поля всех искателей за параллеливаются. Образуется 100 общих выходов — по 10 выходов в декаде. В каждую декаду поля ГИ включается десять линейных искателей: в первую декаду включается ЛИ первой сотенной абонентской группы, во вторую декаду — ЛИ второй сотенной абонентской группы и т. д.
Станция емкостью 1000 номеров имеет трёхзначную нумерацию — от 000 до 999. При наборе абонентом цифры сотен происходит вынужденное искание, при котором выбирается требуемая сотенная абонентская группа. Затем ГИ совершает свободное вращательное движение, при котором отыскивается свободный ЛИ. Свободное искание должно завершиться в межсерийное время — с момента окончания передачи цифры сотен до момента начала передачи в ЛИ цифры десятков.
Структура декадно-шаговой АТС емкостью 10000 номеров уже заметно отличается от представленной на рис. 2.4. Такая станция имеет четыре ступени искания — ступень ПИ, две ступени ГИ и ступень ЛИ. На ступени ПИ вся емкость станции разделяется на k абонентских групп, в каждую из которых включается n абонентских линий. Контактные поля предыскателей одной и той же абонентской группы за параллеливаются, и в них включаются входы группы приборов! ГИ. Количество приборов ГИ, обслуживающих одну абонентскую группу, ограничивается емкостью контактного поля предыскателей. Емкость абонентской группы и зависит от величины телефонной нагрузки, поступающей на станцию от абонентов, и от емкости контактного поля искателя, используемого в качестве ПИ. При других рассматриваемых в этой главе способах соединения между собой контактных полей искателей выбор емкости абонентской группы практически не зависит от емкости контактного поля применяемых искателей.
Коммутационные возможности ступени группового искания характеризуются двумя параметрами: делимостью поля Н, т.е. числом направлений к отдельным группам коммутационных устройств следующей ступени искания, и доступностью О, т.е. числом выходов выбранного направления, к которым возможен доступ в процессе свободного искания. Величина Н делимости поля ГИ определяет эффективность применения группового искания. Каждая ступень ГИ может увеличить емкость станции в Н раз. Поэтому при большей делимости поля ГИ можно получить нужную емкость станции (или сети), применяя меньшее количество ступеней ГИ. Пусть N — емкость станции, М — емкость линейного искателя, s — число ступеней группового искания, а H1, Н2, Нs, — делимость поля ГИ на разных ступенях ГИ. Тогда емкость станции
И=М· Н1,· Н2, ...Нs,
В декадно-шаговых АТС делимость поля ГИ невелика, как правило, Н=10. Тогда, если делимость поля на всех ступенях ГИ одинакова, т.е. Н1,=Н2,=...=Нs,=Н=10, то емкость станции или сети равна N=M 10s'.
Доступность D оказывает большое влияние на использование соединительных путей. Увеличение доступности на ступени ГИ приводит к повышению использования и, следовательно, к уменьшению количества искателей на следующей ступени искания.
Декадное построение поля позволяет непосредственно управлять вынужденным исканием — серия импульсов набора направляется непосредственно в схему того искателя, в котором устанавливается соединение. Для повышения доступности на ступени ГИ в декадно-шаговых АТС иногда применяют двойное свободное искание, используя т.н. релейные смешивающие искатели типа РСИ-3 и РСИ-6. В этом случае, как уже упоминалось, доступность становится переменной величиной.
Выше уже отмечалось, что в декадно-шаговых АТС одни и те же устройства — искатели — принимают информацию о номере вызываемого абонента и устанавливают соединение, работая под непосредственным воздействием импульсов тока, получаемых от номеронабирателя. Для их надежной работы необходимо, чтобы как импульсы, так и паузы между ними имели фиксированную длительность.
В диске номеронабирателя имеется десять пронумерованных отверстий. Для набора определенной цифры, нужно вставить палец в отверстие с соответствующим номером и повернуть диск по часовой стрелке до упора, а затем освободить его. После этого диск сам возвращается в первоначальное положение под воздействием пружинного возвратного механизма. При обратном движении диска связанный с ним импульсный контакт периодически прерывает ток в линии, причем количество прерываний всегда равняется набранной цифре (цифра 1 — одно прерывание, цифра 2 — два прерывания, цифра 0 — десять прерываний). Возвратный механизм поддерживает примерно постоянную скорость обратного движения диска, причем продолжительность каждого прерывания составляет около 60 мс, а паузы между прерываниями — около 40 мс. Так как номер телефонного абонента содержит несколько цифр, с помощью номеронабирателя создается несколько серий импульсов, разделенных меж серийными интервалами. Для надежной работы приборов АТС необходимо, чтобы продолжительность интервалов между сериями импульсов, то есть между набираемыми цифрами, не выходила за определенные границы.
Такой способ передачи цифр известен как «шлейфный способ». Сила тока в шлейфе линии зависит от ее длины, от электрических характеристик кабеля и от питающего напряжения. Обычно она составляет от 20 до 50 мА, чего вполне достаточно для прямого управления работой электромагнитного реле на АТС.
Итак, сигналы набора номера передаются от телефонного аппарата к приборам АТС в виде серий импульсов. Импульсы каждой серии разделяются паузами. Чтобы импульсы и паузы имели нужную длительность, номеронабиратель должен поддерживать в определенных пределах скорость обратного хода диска в и импульсный коэффициент К, представляющий собой отношение продолжительности размыкания импульсного контакта номеронабирателя t, к продолжительности его замыкания tзам:
tраз
К= −
tзам
Для этого коэффициента установлена величина 1.6 с допустимыми отклонениями +0.3 (т.е. К=1.3 —:1.9), а для скорости обратного хода диска — 10 импульсов в секунду ± 10% (т.е. v=9 +11 имп/с).
2.5. Межстанционные соединительные линии
Межстанционной сигнализации посвящена отдельная глава учебника, но эволюция рассматриваемых там протоколов сигнализации восходит к способам передачи и приема сигналов управления и взаимодействия в ДШ АТС. О самих системах сигнализации мы поговорим в главе 8, а здесь покажем лишь сигналы взаимодействия, которые передаются, в зависимости от их назначения, либо от ЛИ IГИ, либо в обратном направлении. Так, например, сигналы ответа и отбоя вызванного абонента передаются от ЛИ к IГИ, а сигнал отбоя вызывавшего абонента, передается в обратном направлении.
Схемы передачи и приема этих сигналов между/ ГИ и ЛИ приведены на рис. 2.5. На этом рисунке указаны четыре состояния схемы: одно — до ответа вызываемого абонента и три — после получения разных сигналов взаимодействия. В передаче и приеме сигналов в схеме /ГИ участвуют сигнальные реле СА и СБ, а также серийное реле С, а в схеме ЛИ — сигнальное реле СВ и импульсное реле И.
В пред ответном состоянии схемы передачи и приёма сигналов взаимодействия (рис. 2.5, а) в II M и в ЛИ к проводу а, соответственно, через обмотки реле СА и И, подключён минус батареи, а к
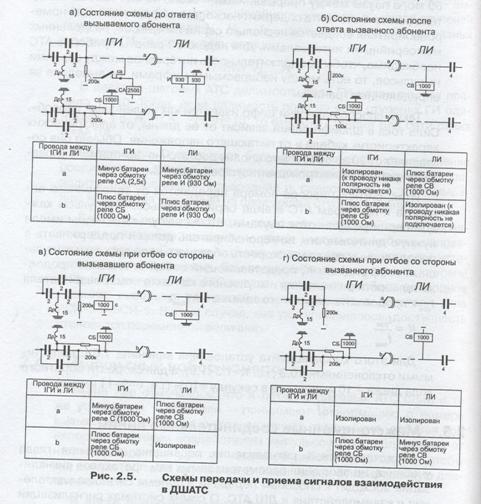
проводу b через обмотки реле СБ и И — плюс батареи. Так как в этом состоянии схемы полярности, подключаемые через обмотки реле СА и И к проводу а и через обмотки реле СБ и И к проводу b, совпадают, то указанные реле не работают.
После ответа вызываемого абонента (рис. 2.5, б) в ЛИ от разговорных проводов отключаются обмотки реле И, и к проводу а кратковременно подключается плюс батареи. При этом в IГИ срабатывает и отключается от провода а реле СА. В ЛИ к проводу а подключается обмотка реле СВ с плюсом батареи. В разговорном состоянии схемы реле СВ в ЛИ не работает, так как в IГИ на провод а полярность не подаётся. По такой же причине не работает в IГИ реле СБ.
Если после разговора первым даёт отбой вызывавший абонент (рис. 2.5, в), в )ГИ к проводу а через обмотку реле С подключается минус батареи. Благодаря этому в ЛИ срабатывает реле СВ, фиксирующее отбой вызвавшего абонента.
При работе через соединительную линию в наиболее сложном режиме оказывается пробное реле в схеме IГИ. Помимо того, что провод с может иметь сопротивление от нуля до нескольких сотен Ом, приходится учитывать то обстоятельство, что потенциалы заземления на разных районных АТС могут существенно различаться. Причина этого — наличие в земле токов, вызываемых, главным образом, трамвайными линиями и линиями электрифицированных железных дорог. Разность потенциалов заземления, которую следует учитывать при расчетах, принята равной ±6 В. Поэтому когда сопротивление провода с трех проводной соединительной линии превышает 700 Ом (что соответствует расстоянию примерно 7 км при использовании кабеля с жилами диаметром 0.5 мм), рассчитать пробное реле, хотя бы с минимальными запасами по токовым режимам, не представляется возможным. В таких случаях на исходящем конце соединительных линий устанавливают комплекты РСЛ-3/3 (так обозначается комплект реле соединительной линии с трех про- водным входом и трех проводным выходом). При этом максимально допустимое сопротивление провода с может составлять 1500 Ом. Об этом мы еще обязательно поговорим в главе, посвященной сигнализации.
Другие аспекты архитектуры ДШ-АТС в данной главе не рассматриваются по причине, которую весьма точно сформулировал Э. Хемингуэй: Устаревают не только ответы, но и сами вопросы».
Координатные АТС
Как только вы научились делать что-то по настоящему хорошо, оказывается, что делать это уже не нужно.
Закон Лоури
Еще в 1900 г. Бетуландер и Пальмгрен в Швеции начали работать над заменой искателя Строуджера. В 1905 г. соотечественник Бетуландера и Пальмгрена Эриксон предложил создать на основе релейных схем так называемые координатные поля — идея, далеко опередившая свое время. Хотя эти работы непосредственного практического выхода не имели, можно считать, что именно они легли в основу современных координатных АТС. Идею построения коммутационного прибора с релейными контактами, которые замыкаются с помощью координатных реек, предложил также Рейнольдс в США в 1914 г.
В 1919 г. фирма «Бетуландер компания» уже смогла построить несколько небольших экспериментальных координатных станций, хорошо зарекомендовавших себя в работе. А по случаю 300-летия города Гетеборга, которое праздновалось в 1923 г., там была открыта первая современная координатная АТС. Поэтому именно 1923 г. считается годом ввода в действие техники координатной коммутации.
С 1930 г. на основе этой техники в Швеции стали строиться центральные АТС. После того как в Мальме была построена АТС на 40000 номеров, началось триумфальное шествие координатных станций по всему миру. Успехи шведов побудили фирму «Белл телефон ком- пани» начать собственные разработки, и в 1938 г. первая координатная АТС вступила в строй в США. В начале 40-х годов шведский «Эриксон» приступил к разработке и производству координатных АТС разных типов для городской, междугородной и сельской связи (ARF-50, ARM-20 и др.).
После второй мировой войны техника координатной коммутации получила повсеместное распространение. В 1950 г. она вводится в Финляндии, в 1952 г. — в Голландии, в 1955 г. — в Бразилии, с этого же года она распространяется в странах Азии и в Австралии. В 50-х г. координатные АТС были созданы во Франции (Пентаконта) и в Англии (5005). В 60-х годах были разработаны городские координатные АТС в Чехословакии (РК-20) и ГДР (АТС-65).
В Советском Союзе разработка координатных АТС разного назначения была начата в первой половине 50-х годов. В 1956 г. было организовано производство городских координатных подстанций на сто номеров ПС-МКС-100, а в последовавшие годы были разработаны сельские координатные АТС малой и средней емкости К-40/80, К-100/2000. Стала также выпускаться модификация АТС типа К-100/2000 для учрежденческой связи. В середине 60-х годов завершилось создание координатной станции типа АТСК для городских телефонных сетей. С целью уменьшения затрат на абонентские линейные сооружения ЛОНИИС совместно с заводом «Тесла-Карлин» (Чехословакия) была разработана городская координатная подстанция на 1000 номеров ПСК-1000, которая успешно использовалась и еще сегодня используется во многих ГТС. Для междугородной телефонной связи выпускались координатные АМТС-2 и АМТС-З.
Дальнейшее усовершенствование городских и сельских координатных АТС с целью повысить надежность коммутационной аппаратуры, увеличить пропускную способность АТС, уменьшить стоимость оборудования и снабдить его комплексом контрольно-проверочных устройств привело к созданию станций АТСК-У и АТСК-50/200М.
В этой главе будут рассмотрены применяемые сегодня в ВСС РФ координатные АТС, предназначенные для городской, сельской и учрежденческой связи. Но прежде посмотрим, что же представляют собой коммутационные приборы координатного типа и как они работают.
Так как координатные соединители рассматриваются здесь после декадно-шаговых искателей, воспользуемся следующим, часто приводимым примером. Пусть десять выходов десяти вращательных искателей многократно соединены между собой, как это показано на рис. 3.1 слева. Такая схема позволяет каждому из десяти входов получить соединение с каждым из десяти выходов, разумеется, если тот свободен. Аналогичная по возможностям схема координатного соединителя 10х10 показана на рис. 3.1 справа.
Самая простая техническая реализация такой модели — включить по одному реле в каждую точку пересечения «горизонталей» и «вертикалей». Но тогда соединитель 10х10 будет содержать сто реле, а значит — сто электромагнитов, сто якорей и сто комплектов контактных пружин.
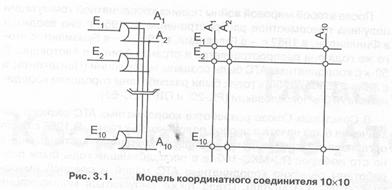
Нашлось, однако, более остроумное решение — заменить сто электромагнитов двадцатью (10 — для горизонтальных линеек координатного поля и 10 — для вертикальных) и применить такую конструкцию соединителя, в которой для выбора любого выхода используются два электромагнита (один — по горизонтали, второй — по вертикали), а для удержания полученного соединения служит только второй из них. В этой конструкции с десятью электромагнитами, называемыми выбирающими, связано 5 горизонтальных реек (по одной рейке на каждую пару магнитов). При срабатывании того или другого из пары выбирающих электромагнитов связанная с ними рейка поворачивается на небольшой угол в ту или в другую сторону (кстати, именно эти горизонтальные рейки привели к английскому названию координатного соединителя — crossbar). На каждой рейке имеется 10 упругих выбирающих пальцев, которые в состоянии покоя находятся между группами контактных пружин, расположенными в соседних горизонтальных рядах. Один палец обслуживает две контактные группы; так что каждая рейка обслуживает 20 контактных групп (соответственно, 5 реек обслуживают 100 контактных групп). Если срабатывает нижний выбирающий электромагнит, то связанная с ним горизонтальная рейка сдвигает 10 выбирающих пальцев к 10-ти контактным группам, находящимся выше рейки; если же срабатывает верхний выбирающий электромагнит, то рейка сдвигает пальцы к 10-ти нижним группам контактов.
С каждой из 10-ти вертикальных планок жестко связан один из 10-ти удерживающих электромагнитов. При срабатывании удерживающего электромагнита связанная с ним планка поворачивается вокруг своей вертикальной оси и сдвигает в горизонтальном направлении все пять выбирающих пальцев, обслуживающих контактные группы данной вертикали. Существенно, что только тот палец, который был перемещен выбирающим электромагнитом, пока еще продолжающим удерживать свой якорь, сдвигаясь при повороте вертикальной планки, воздействует на опору, производящую включение контактов выбранной таким образом контактной группы, и остается плотно прижатым к этой опоре. Воздействие вертикальной планки на другие пальцы не влияет на состояние контактных групп и на работу соединителя. Теперь горизонтальная рейка может быть возвращена в нейтральное положение — должен отпустить свой якорь связанный с ней выбирающий электромагнит. Удерживающий электромагнит остается в работе до окончания соединения. Все ли вам ясно? Повторим теперь это снова в сжатом виде:
1) срабатывает выбирающий электромагнит — выбирающие пальцы «выбирают» один из 10 горизонтальных рядов контактных групп;
2) срабатывает удерживающий электромагнит — замыкаются контакты в выбранной точке пересечения горизонталей и вертикалей, и планка, связанная с якорем удерживающего электромагнита, плотно зажимает выбирающий палец, благодаря чему замыкается соответствующая группа контактов;
3) отключается выбирающий электромагнит — горизонтальная рейка, возвратившись в нейтральное положение, готова для перемещения остальных пальцев;
4) только когда контакты в точке пересечения нужно разомкнуть, выключается цепь удерживающего электромагнита, и использовавшийся выбирающий палец освобождается.
Таким образом, в координатном соединителе одновременно может существовать множество соединений, но они должны устанавливаться по очереди и под контролем специального устройства — маркера, который управляет электромагнитами, создающими очередное соединение. Поэтому, в отличие от АТС, построенных на декадно-шаговых искателях с прямым установлением соединений, которые сами обрабатывают импульсы набора, поступающие от абонента, в координатных АТС используется обходное установление соединений, о чем еще будет сказано в следующем параграфе.
Применяемые в отечественных координатных АТС коммутационные устройства называются многократными координатными соединителями (MKC). Контактное поле МКС состоит из групп контактных пружин релейного типа с контактами на замыкание. В ряде конструкций МКС вместо неподвижных контактных пружин применяются общие струны, с которыми образуют контакт подвижные пружины. Известно несколько разновидностей МКС, различающихся конструкцией, количеством горизонталей и вертикалей, объединенных общей системой привода, и некоторыми другими признаками. Два наиболее распространенных типа МКС имеют следующие условные обозначения: МКС 20х10х6 и МКС 10х20х6. В таком обозначении первое число указывает количество вертикалей, входящих в состав одного МКС, второе — емкость контактного поля каждой вертикали и третье — проворность, т.е. число проводов, коммутируемых каждой группой контактов. Схема многократного координатного соединителя МКС 20х10х6 изображена на рис. 3.2.
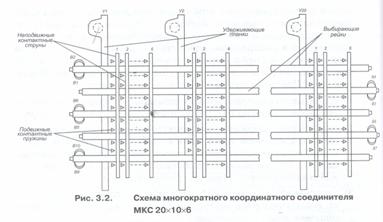
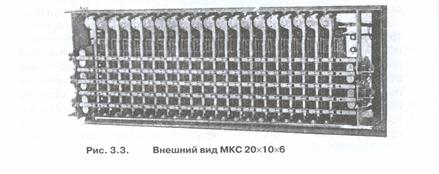
В соответствии со своим названием этот МКС имеет 20 вертикально расположенных контактных пакетов. В каждом пакете имеется 10 шести контактных групп. В этих группах подвижные пружины — индивидуальные, а роль неподвижных пружин исполняют контактные струны, общие для всех 10 групп. Каждому пакету придан удерживающий электромагнит, якорь которого представляет собой одно целое с расположенной вертикально удерживающей планкой. При работе удерживающего электромагнита якорь притягивается, планка поворачивается вокруг своей вертикальной оси и прижимает к опоре контактной группы выбирающий палец, сдвинутый работающим в данный момент выбирающим электромагнитом в сторону этой группы. Пакет контактных групп с удерживающей планкой (якорем) и удерживающим электромагнитом составляют отдельный конструктивный элемент, называемый вертикальным блоком или вертикалью. Внешний вид МКС 20х10х6 представлен на рис. 3.3. Применяются также и МКС других типов, имеющие проводность от 3 до 12.
Различают двухпозиционные и многопозиционные МКС. Число позиций определяется числом электромагнитов, которые должны сработать для выполнения соединения. Например, в двухпозиционном МКС всякий раз срабатывает два электромагнита (один выбирающий и один удерживающий), в трехпозиционном — три (два выбирающих и один удерживающий) и т.д. Чем больше позиционность МКС, тем эффективнее строится на его основе коммутационное поле (за счет уменьшения проворности увеличивается доступность), но тем сложнее конструкция. Наиболее широко распространены двухпозиционные и трехпозиционные соединители. МКС получили свое название в связи с многократным использованием каждой из выбирающих реек для организации соединений в разных вертикалях одного МКС.
Рассмотренные в предыдущей главе декадно-шаговые и машинные АТС обладают рядом существенных недостатков, присущих коммутационным станциям со щеточными искателями. Один из них связан с механическими свойствами искателей: для установления соединения с нужной быстротой требуется, чтобы щетки двигались со значительной скоростью, что, в свою очередь, ведёт к поломкам и к нарушениям их регулировки. Другой недостаток, присущий декадно-шаговым и машинным АТС, — низкое качество скользящего контакта щётка — ламель. Дело в том, что в качестве материала для скользящих контактов используются неблагородные металлы, имеющие благодаря своей жёсткости больший срок службы, чем, например, благородный металл серебро. Однако во время работы сопротивление такого контакта изменяется в широких пределах, вследствие чего ухудшается качество разговорного тракта. Все это приводит к невысокой надежности коммутационных приборов, большим затратам труда на обслуживание станционного оборудования, высокому энергопотреблению, низкому качеству разговорного тракта, образованного контактами скольжения, и т.п.
В координатных АТС основным коммутационным прибором является многократный координатный соединитель, который лишен перечисленных недостатков. Более того, устройство МКС, принцип его работы и коммутационные возможности совсем не такие, как у коммутационных механизмов других типов. По этой причине скелетное построение координатных АТС, структура ступеней искания и принципы управления коммутацией отличаются от тех, которые типичны для АТС, построенных на шаговых и декадно-шаговых искателях. В структуре ступеней искания используется т.н. звеньевое включение, позволяющее строить многозвенные коммутационные блоки.
Итак, в электромеханических АТС могут использоваться два разных принципа установления соединений — прямой и обходный.
Прямой принцип характеризуется тем, что приборы, выбирающие нужное направление связи и свободную линию в этом направлении, сами принимают цифры номера, устанавливают на их основе соединение и образуют разговорный тракт. Такой принцип установления соединений используется в большинстве тех АТС, где в качестве основных коммутационных приборов применяются щеточные искатели. В частности, рассмотренные в предыдущей главе декадно-шаговые АТС используют именно этот принцип.
Обходный принцип характеризуется тем, что выбор направления связи и поиска свободной линии в этом направлении отделён во времени от процесса соединения входа коммутационного прибора с выходом, в который включена выбранная линия. Сам коммутационный прибор не участвует в выборе направления и в поиске свободной линии. Эти процедуры выполняет некое устройство, как правило, общее для группы приборов (в координатных АТС это — маркер). Оно принимает цифры номера, обрабатывает их, и, в соответствии с результатом обработки, управляет работой коммутационного прибора, воздействуя на его элементы таким образом, чтобы вызывающий вход был соединен с одним из свободных выходов в нужном направлении. Иначе говоря, установление соединений производится в обход коммутационного прибора, в связи с чем такой принцип и назван обходным. Схематично его иллюстрирует рис. 3.4.
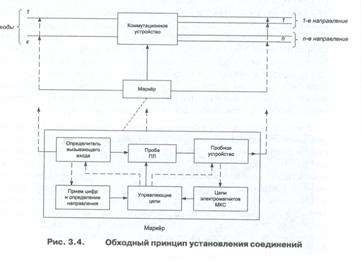
При установлении каждого соединения маркёр занимается кратковременно и поэтому способен обслужить несколько коммутационных приборов с большим числом входов и выходов. В соответствии с функциями, выполняемыми маркером, его блок-схема, представленная в нижней части рис. 3.4, содержит определитель вызывающего входа, определитель требуемого направления связи, устройство, отмечающее свободные промежуточные линии, через которые вызывающий вход коммутационного прибора может быть подключен к свободному выходу в нужном направлении, пробное устройство для поиска свободного выхода в этом направлении, устройство включения выбирающего и удерживающего электромагнитов МКС, обеспечивающих соединение входа с выходом, и цепи управления работой маркера.
Координатные АТС разделяются на АТС с управлением по ступеням искания и на АТС с централизованным управлением.
В координатных АТС с управлением по ступеням искания функции этих ступеней те же, что и в большинстве АТС, построенных на щеточных искателях (декадно-шаговых и машинных). В таких координатных АТС предусматривается некоторое количество ступеней группового искания, зависящее от емкости станции и сети, и ступень абонентского искания. Последняя выполняет функции предыскания, обслуживая вызовы, исходящие от абонентов, и функции линейного искания, обслуживая вызовы, входящие к абонентам. Характерной особенностью координатных АТС с управлением по ступеням искания является то, что определение маркером свободного выхода ступени, с которым следует соединить ее вызывающий вход, происходит на каждой ступени без анализа состояния соединительных путей на следующих ступенях искания.
Рассмотрим этот вопрос подробнее. Итак, практически во всех координатных АТС применяется обходный способ управления коммутацией. Коммутационные блоки АТС построены на МКС, а в качестве управляющих устройств используются маркеры и, в большинстве случаев, регистры, избавляющие маркеры от функций приема передаваемых медленным способом цифр. Различают четыре вида координатных АТС:
1) с последовательным установлением соединения по ступеням искания и с регистрами для приема цифр, набираемых абонентами (ст.н. абонентскими регистрами);
2) с регистровыми устройствами и маркерами, распределенными по ступеням искания;
3) с абонентскими регистрами и с управлением сразу несколькими ступенями
искания;
4) с централизованным управлением без разделения коммутационного оборудования станции на ступени искания.
Большинство координатных АТС относится к первому виду. Так, в отечественных станциях АТАК, АТСК-У, К-100/2000 соединения устанавливаются по ступеням искания с использованием абонентских регистров. При этом уменьшается объем регистрового оборудования, и используются сравнительно несложные маркеры. На рис. 3.5, а приведена схема соединительного тракта станции АТАК, которая рассматривается более подробно в следующем параграфе. При установлении соединения выбор линий производится на каждой ступени независимо от возможности их дальнейшего подключения к вызываемой линии.
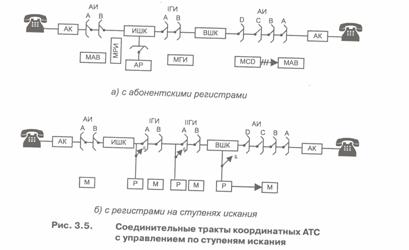
Существуют координатные АТС второго вида, где на ступенях группового и абонентского искания используются регистры, каждый из которых принимает адресную информацию, необходимую для установления соединения лишь через одну ступень искания. К АТС этого типа относятся шведская станция ARF-50, которая нашла применение в отечественных ГТС, и разработанная в ГДР координатная АТС-65. На рис. 3.5, б приведена схема соединительного тракта ARF-50. Соединение на каждой ступени ГИ должно завершиться до начала передачи абонентом цифры, предназначенной для следующей ступени искания. На приведенной схеме регистр ступени ГИ принимает одну цифру, и поэтому число направлений в блоке ГИ равно десяти. Можно предусмотреть прием регистром ГИ также и двух цифр, но с определенной первой цифрой. В системе ARF-50 используются тысяче линейные блоки АИ, и поэтому регистр ступени АИ принимает три последние цифры номера. Преимуществом АТС второго вида является простота связи с декадно-шаговыми АТС, поскольку при входящей связи импульсы набора номера непосредственно принимаются регистрами на ступенях искания, а при исходящей связи серии импульсов, поступающих от абонента, транслируются через ИШК и направляются к искателям декадно-шаговой АТС. Координатные АТС с регистрами, распределенными по ступеням искания, близки по своим возможностям к АТС с прямым управлением коммутацией.
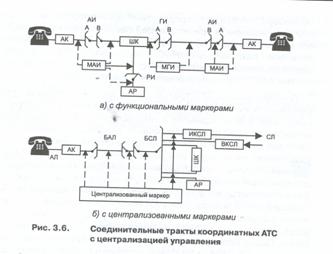
В координатных АТС третьего вида для внутристанционных соединений предусматривается лишь одна ступень ГИ с двухкаскадными или трехкаскадными коммутационными блоками большой емкости (до 1000 исходящих линий). Управляют коммутацией абонентские регистры и маркеры, которые обеспечивают организацию соединения через одну или две ступени искания (рис. 3.6, а). На ступени АИ используются двухкаскадные блоки и для исходящей, и для входящей связи. Каждый коммутационный блок обслуживается, в зависимости от его емкости, одним или двумя маркерами. При исходящей связи маркер блока АИ выполняет функцию подключения линии вызывающего абонента к регистру. При этом маркер производит обусловленное искание через ступени АИ и регистрового искания. После набора номера при внутристанционной связи маркеры ступени ГИ (МГИ) и АИ (МАИ), получив из регистра необходимую адресную информацию, совместно выполняют функции подключения линии вызывающего абонента к вызываемой линии. При установлении соединения на ступени ГИ занимается такая свободная и доступная исходящая линия, которая в блоке АИ имеет доступ к вызываемой абонентской линии через свободную промежуточную линию. Поэтому отпадает необходимость иметь в ступени АИ третий каскад. Такой способ управления применяется в английской АТС типа 5005 А и во французской АТС Пентаконта 1000 В.
В координатных АТС четвертого вида коммутационное оборудование не делится на ступени искания, а образует общее коммутационное поле. Централизованные маркеры управляют соединением, производя сквозное обусловленное искание через всю АТС. При этом несколько сокращаются объем коммутационного оборудования и время установления соединения, потому что при обусловленном искании на каждом участке соединительного тракта выбираются только такие пути, по которым можно организовать соединение линий вызывающего и вызываемого абонентов.
На рис. 3.6, б показан соединительный тракт координатной АТС «Кросс бар №1» (США), в которой коммутация производится через двух каскадные блоки абонентских линий (БАЛ) и двухкаскадные блоки соединительных линий (БСЛ) под управлением центрального маркера, взаимодействующего с абонентским регистром. Применение такого вида централизованного управления в координатных АТС создало предпосылки для его использования (уже в качестве основного способа) в первых квазиэлектронных и электронных АТС с программным управлением, которые будут рассматриваться далее.
Существует много типов координатных АТС как отечественного, так и заграничного производства. АТС разных типов отличаются друг от друга по многим признакам, главными из которых являются конструкция и коммутационные параметры МКС, скелетная схема станции, емкость и группообразование блоков ступеней искания и степень централизации управления коммутационными приборами. Известно несколько типов координатных АТС отечественного производства, из которых будут рассмотрены станции АТСК 100/2000 для учрежденческих и сельских сетей средней емкости, а также станции АТСК и АТСК-У, предназначенные для городских телефонных сетей.
Для построения названных АТС используются многократные координатные соединители МКС 20х10х6, МКС 10х20х6, МКС 10х10х12, реле РЭС-14 и РПН, поляризованные реле РП-4 или РП-5, полупроводниковые диоды и триоды, и некоторые вспомогательные элементы. Для электропитания этих АТС служит источник постоянного тока с номинальным напряжением 60 В и с допустимыми колебаниями напряжения в пределах 54 — 72 В.
3.3. Городские координатные станции АТСК и АТСК-У
АТСК и АТСК-У до сих пор являются наиболее распространенными районными станциями городских телефонных сетей России. Управление коммутационными приборами производится в них с помощью обще станционных регистров и маркеров на ступенях
искания. Скелетная схема АТАК показана на рис. 3.7. Каждый коммутационный блок ступени АИ рассчитан на включение 1000 абонентских линий, и потому емкость станций целесообразно выбирать кратной тысяче. Однако можно строить и АТС емкостью меньше 1000 номеров. Для таких АТС предусмотрены специальные сотенные блоки АИ.
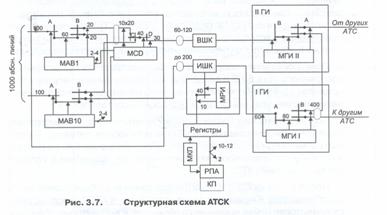
Набираемый абонентом номер принимается и запоминается абонентским регистром, который участвует в установлении всего соединения. Управление соединением производится по ступеням искания (АИ, РИ, ГИ) с помощью индивидуальных для каждого коммутационного блока маркеров. На ступенях искания (кроме РИ в АТСК) применяются двухкаскадные коммутационные блоки. Указанные особенности позволяют использовать сравнительно простые маркеры, что повышает надежность их действия и облегчает эксплуатацию.
Для повышения надежности городских координатных АТС, сокращения капитальных и эксплуатационных затрат на станционные сооружения, улучшения технологии производства аппаратуры и уменьшения площади авто зала в 1975г. было завершено усовершенствование АТСК, и в 1978 г. началось серийное производство оборудования АТСК-У. При усовершенствовании сохранены схемы коммутационных блоков на ступенях абонентского и группового искания, принципы управления коммутацией и способы передачи сигналов. Разработаны двухкаскадные ступени регистрового искания для подключения абонентских и входящих регистров, что позволило улучшить использование дорогостоящего регистрового оборудования.
В качестве коммутационных приборов в АТСК и АТСК-У используются МКС, электромагнитные реле и электронные элементы. В коммутационных блоках на ступенях искания применяются унифицированные МКС четырех типов: двухпозиционный шести проводный МКС 20х10х6; трехпозиционный шести проводный МКС 10х20х6; трехпозиционный трех проводный МКС 20х20х3 и двухпозиционный двенадцати проводной МКС 10х12х12. В абонентских, шнуровых и линейных комплектах применяются реле типа РПН. В маркерах и регистрах используются реле типа РЭС-14. Транзисторы нашли применение в устройствах передачи и приема частотных сигналов, а также в отдельных функциональных узлах регистров и маркеров.
Электропитание оборудования осуществляется от источника постоянного тока 60 В с допустимыми отклонениями напряжения в пределах 58-66 В. Допустимая разность потенциалов между заземлениями станционных батарей разных АТС составляет ±8 В.
При установлении соединений абоненты получают стандартные (согласно Рекомендациям МККТТ) акустические сигналы. Линейные сигналы при местных и междугородных соединениях по составу и способу передачи соответствуют сигналам, принятым в типовых декадно-шаговых АТС.
После отбоя любого из участников связи его абонентская линия освобождается. Соединительные устройства в АТСК освобождаются лишь после отбоя вызванного абонента, а вызвавшему абоненту, если он не дает отбоя, передается сигнал «Занято» из его абонентского комплекта. В АТСК-У после отбоя вызванного абонента освобождаются все соединительные устройства, кроме блока АВ ступени АИ и исходящего шнурового комплекта ИШК, из схемы которого посылается сигнал «Занято» не дающему отбоя вызвавшему абоненту. Если отбоя не дает вызванный абонент, то и в АТСК, и в АТСК-У сигнал «Занято» посылается ему из входящего шнурового комплекта ВШК.
В табл.3.1 приведены управляющие сигналы, передаваемые многочастотным кодом «2 из 6», которыми обмениваются маркеры и регистры в АТСК-У. Сигналы 1 — 3 используются для запроса передачи адресной информации многочастотным способом. Сигналы 8 — 10 запрашивают переход к передаче информации батарейным способом, сигналы 4 и 5 указывают состояние вызываемой абонентской линии, а сигналы 6 и 7 необходимы, соответственно, для повторения адресной информации при ее искажении (получение одной или трех частот) и для организации второй попытки установить соединение при отсутствии свободных соединительных устройств на ступени искания.
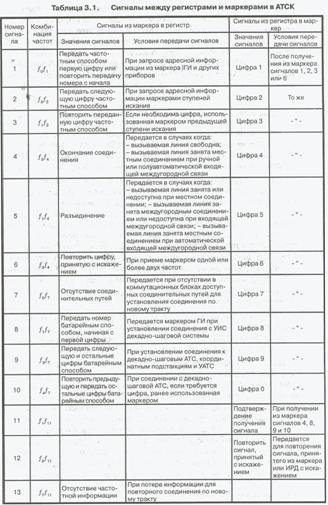
В АТСК-У применяется дополнительный сигнал 15 «Отсутствие частотной информации», который передается из маркера в регистр при потере информации в тракте. Получив этот сигнал, регистр нарушает частично установленное соединение и обеспечивает повторное соединение по новому тракту. Благодаря введению такого сигнала в АТСК-У повторная попытка соединения при сбоях информации происходит через 200 мс, вместо 4 с в АТСК, где это обеспечивается технической выдержкой времени.
3.4. Сельские координатные АТС К-50/200М
В сельских телефонных сетях (СТС) применяются координатные АТС малой емкости: К-50/200 и К-50/200М в качестве оконечных (ОС) и узловых (УС) станций, а также координатные АТС К-100/2000 средней емкости в качестве центральных станций (ЦС), УС и ОС.
АТС К-50/200М имеют блочное построение с емкостью абонентского блока 50 номеров. Каждый такой блок размещается на двустороннем ставите шкафного типа, где устанавливается 30 абонентских комплектов АК для включения индивидуальных линий и 10 абонентских комплектов САК для включения линий спаренных аппаратов. При спаренном включении телефонных аппаратов предусматривается двойное разделение цепей с установкой для каждого аппарата диодно-релейной приставки ДРП. Номера спаренных аппаратов различаются цифрой десятков. Устройства спаренного включения в сельских АТС сложнее, чем в городских, так как они предусматривают возможность связи между аппаратами, включенными в одну линию.
Для связи оконечной АТС К-50/200М с УС или с ЦС может использоваться, в зависимости от емкости ОС, от 7 до 17 соединительных линий (СЛ) двустороннего действия. Кроме того, возможна организация поперечной связи двух ОС по одной-двум СЛ.
В АТС К-50/200М используется обходное управление коммутацией с применением обще станционных маркеров ступеней АИ (МАИ) и РИ (МРИ) и пятизначных абонентских регистров, разработанных с учетом возможности введения в СТС закрытой 5-значной нумерации. В настоящее время чаще всего используется открытая нумерация без индекса внешней связи: при внутренней связи абонент К-50/200М набирает 3-значный номер, а при межстанционной связи — 5-значный номер. Первая цифра 5-значного номера должна отличаться от первой цифры 3-значных номеров. После приема адресной информации абонентский регистр подключается к маркеру, передает сигнал о требуемом направлении связи (внутренняя, внешняя или поперечная) и затем передает много проводным способом адресную информацию.
Функциональная схема оконечной АТС К-50/200М на 50 номеров приведена на рис.3.8. В этой АТС используются однокаскадные ступени абонентского и регистрового искания. Ступень АИ выполняет также функцию группового искания, выбирая по сигналу из регистра внешнее направление и в нем — свободную СЛ. Абонентские регистры АР подключаются через шести проводную ступень РИ прямо к абонентским комплектам, что позволяет применить на ступени АИ трехпроводный коммутационный блок.

Исходящее соединение (рис. 3.9. а). После набора абонентом одной, двух или трех цифр, определяющих направление связи с вышестоящей станцией (УС, ЦС) или направление поперечной связи с другой ОС, абонентский регистр занимает маркер блока АИ и передает к нему сигнал о требуемом направлении. Если это — направление к УС или ЦС, МАИ с помощью пробного устройства ПУ РСЛ находит свободный комплект РСЛ и соединяет его с вызывающей абонентской линией через блок АИ. Однако разговорные провода коммутируются в схеме РСЛ лишь после окончания работы АР. Одновременно МАИ создает цепь занятия маркера блока РИ для подключения к выбранному РСЛ регистра. После этого маркеры блоков АИ и РИ освобождаются. Через вертикаль А блока РИ абонентский регистр остается подключенным к абонентской линии для продолжения приема цифр номера, а через вертикаль Б блока РИ регистр подключен к РСЛ для передачи в этот комплект декадными импульсами всех принятых цифр. Способ дальнейшей передачи этой информации на встречную АТС зависит от типа РСЛ. Передав в РСЛ адресную информацию, абонентский регистр освобождается. Питание микрофона в аппарате вызывающего абонента и удержание соединения производится из РСЛ.
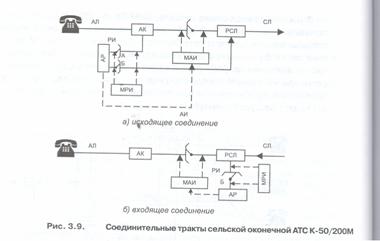
Соединение в направлении поперечной связи устанавливается аналогично, за исключением того, что выбор одного из двух РСЛ этого направления производится в МАИ отдельным пробным устройством ПУ ПС.
Входящее соединение (рис. 3.9. б).При занятии комплекта РСЛ входящим вызовом маркер блока РИ подключает этот РСЛ к свободному абонентскому регистру через одну из вертикалей Б блока РИ. Регистр, не передавая сигнал Ответ станции», последовательно принимает три цифры абонентского номера. После этого АР занимает МАИ и передает к нему адресную информацию много проводным способом. Затем маркер подключает РСЛ к вызываемой абонентской линии. Установив соединение, МАИ и АР освобождаются. Пробу вызываемой линии, посылку вызова и контрольного сигнала, питание микрофона в телефонном аппарате и удержание соединения выполняет линейный комплект РСЛ.
На оконечных станциях К-50/200М применяются РСЛ нескольких типов. Для связи по физическим или по уплотненным аппаратурой ВЧ соединительным линиям с сельскими АТС любого типа и с городскими АТС широко используются двусторонние индуктивные комплекты РСЛО. Могут применяться двусторонние комплекты РСЛОВЧ, предназначенные для связи с координатными станциями по СЛ с частотным уплотнением. Для связи по СЛ, уплотненным аппаратурой ИКМ, применяются подключающие комплекты ПКО.
Сельские узловые АТС К-50/200М имеют такую же емкость, как и оконечные станции. Отличаются они тем, что в них дополнительно устанавливается транзитное оборудование.
3.5. Координатные АТАК-100/2000
Оборудование АТСК-100/2000 предназначено для станций емкостью от 100 до 2000 номеров, но допускает увеличение емкости до 4000 номеров. Используется в сельских телефонных сетях и, в разных модификациях, в учрежденческих сетях некоторых ведомств. Так, для телефонных сетей железнодорожного транспорта оборудование типа К-100/2000 выпускалось с учетом особенностей этих сетей. В связи с использованием в них четырех- значной нумерации абонентских линий станции АТСК-100/2000 снабжались четырех- значными регистрами. Для связи между станциями применялись трех проводные соединительные линии и универсальные шнуровые комплекты ШКУ, позволяющие транслировать сигналы на другие станции. Кроме того, предусматривалось транзитное оборудование, с помощью которого можно устанавливать соединения по обходным путям с четырех проводной коммутацией разговорных цепей.
В сельских телефонных сетях общего пользования АТСК-100/2000 используются в качестве ЦС, УС и ОС. В станциях этого типа применяются ступени абонентского, группового и регистрового искания. Основными коммутационными приборами АТСК-100/2000 являются унифицированные МКС 20х10х6, МКС 10х20х6 и МКС 10х10х12, реле РЭС-14 и РПН. Функциональная схема ЦС АТСК-100/2000 с двумя ступенями ГИ изображена на рис. 3.10.
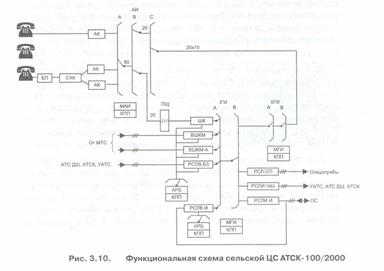
На АТСК-100/2000 применяется обходное управление коммутацией по ступеням искания при помощи релейных маркеров, о котором говорилось выше в этой главе. Пятизначные абонентские регистры АРБ используются для установления внутренних, исходящих и входящих соединений. В последнем случае они выполняют функции входящих регистров. Передача информации о номере вызываемой абонентской линии из регистра в маркеры и управляющих сигналов в обратном направлении производится по разговорным проводам полярно-числовым кодом с применением способа импульсный челнок». За каждым маркером и за каждым регистром закрепляются индивидуальные релейные кодовые приемопередатчики КПП. Передача информации из регистра к другим не однотипным станциям производится батарейным способом. Шнуровой комплект позволяет транслировать декадные импульсы к встречной станции любой системы.
Связь АТСК-100/2000 с другими сельскими АТС может быть организована по физическим двухпроводным цепям с применением индуктивного способа передачи сигналов и односторонних комплектов РСЛИ-И и РСЛВ-И, которые могут применяться и для связи по уплотненным цепям. Но в этом случае для согласования с аппаратурой уплотнения дополнительно устанавливаются комплекты низкочастотного окончания КНО. Если используются двусторонние физические СЛ, то односторонние комплекты РСЛИ-И и РСЛВ-И можно включить в одну линию с обеспечением преимущества для входящего сообщения. Разработаны и выпускаются и двусторонние индуктивные комплекты РСЛИ. Входящие индуктивные комплекты обслуживаются с ожиданием отдельной группой регистров, поскольку эти комплекты занимаются без проверки свободности АРБ.
Для исходящей связи от АТСК-100/2000 к декадно-шаговым и координатным АТС большой емкости применяются трех проводные СЛ одностороннего использования с комплектами РСЛИ-БЗ (батарейный способ передачи сигналов, линии трех проводные). Для входящей связи по трех проводным СЛ применяются комплекты РСЛВ-БЗ. Соединительные линии от МТС включаются в комплекты ВШКМ или ВШКМА (при автоматической междугородной связи).
Для организации исходящей автоматической междугородной связи в АТСК-100/2000 предусматривается дополнительное оборудование — аппаратура автоматического определения номера и категории абонента АОН, промежуточные регистры ПР, устройство запроса и приема информации УЗПИ и исходящие комплекты заказно-соединительных линий ИКЗСЛ (на рис. 3.10 не показаны).
3.6. Координатные подстанции ПСК-1000
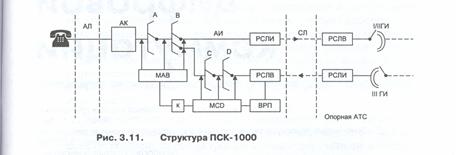
Координатная подстанция обслуживает от 100 до 2000 абонентов. На подстанции устанавливается часть оборудования опорной АТС, причем в нее выносятся абонентские комплекты АК, приборы ступени АИ и комплекты РСЛ. Представленная на рис. 3.11 под- станция ПСК-1000 представляет собой ступень абонентского искания АИ с отдельными маркерами МАВ и MCD блоков А-В и С-О. Для исходящей и входящей связи применены комплекты РСЛИ и РСЛВ. Трехзначный регистр ВРП служит для фиксации последних
. трех знаков номера абонента, передаваемых от опорной АТС, и для передачи их к маркерам подстанции. Подстанция этого типа может быть смонтирована на 400, 600, 800 и 1000 номеров.
На этом можно закончить обсуждение второго этапа эволюции систем коммутации — координатных АТС — как базы для понимания современной архитектуры цифровых АТС, рассматриваемой в следующих восьми главах книги. В них, в частности, будет показано, что многие принципы проектирования цифровых АТС заимствованы у электромеханических телефонных станций, производившихся в прошлом. Так, например, первые АТС с программным управлением использовали модифицированные координатные коммутаторы в качестве программно управляемого коммутационного поля. Более того, структура управления, обработка вызова, обходная маршрутизация, расчет коммутационного поля — все это пришло из первых координатных телефонных станций.