ПОМЕХОУСТОЙЧИВОЕ КОДИРОВАНИЕ И ПЕРЕМЕЩЕНИЕ
3.1. ПРИНЦИПЫ ПОМЕХОУСТОЙЧИВОГО КОДИРОВАНИЯ
Более пятидесяти лет назад американский ученый К. Шеннон сформулировал положение, согласно которому существует такой метод кодирования сообщений, позволяющий обеспечить их безошибочную передачу по каналу с шумами при условии, что скорость передачи будет ниже некоторой величины, называемой пропускной способностью канала. Однако он не указал, как реализовать этот метод. С тех пор и по настоящее время ведутся интенсивные поиски избыточных помехоустойчивых кодов, с помощью которых можно обнаруживать и исправлять ошибки, возникающие в канале связи.
Помехоустойчивое кодирование сообщений или кодирование с прямым исправлением ошибок применяется в системах связи, в которых отсутствует или недоступен обратный канал для передачи запросов на повторную передачу, задержки в канале при запросах повторной передачи оказываются недопустимо большими или, на- конец, уровень помех настолько велик, что количество повторных передач становится чрезвычайно большим.
Упрощенная структурная схема системы передачи дискретных сообщений, с помехоустойчивым кодированием, изображена на рис.3.1. Здесь рассматривается случай блокового кодирования. Источник двоичной информации вырабатывает последовательность символов сообщения со скоростью R симв./с. Эти символы группируются в блоки длиной k символов. В каждом блоке добавляется (n — k) дополнительных символов и образуется кодовое слово (n ,k) избыточного блокового кода. Эти избыточные символы иногда называют проверочными. Так как каждое слово, содержащее и символов, переносит только k бит информации, то скорость передачи на выходе кодера равна К/и бит/с. Величина Кlи носит название кодовой скорости. Таким образом, в кодере осуществляется преобразование слова сообщения в кодовое слово
![]()
путем соответствующим образом подобранных проверочных символов.
Каждый из кодовых символов модулирует параметр сигнала- переносчика, вид которого зависит от среды передачи. На прием- ной стороне в демодуляторе осуществляется восстановление переданных кодовых символов на основе жестких или мягких решений.
При жестких решениях оценки переданных кодовых символов формируются путем окончательных решений относительно их значений. Качество оценки в этом случае характеризуется условными вероятностями ошибки (трансформации) при демодуляции кодовых символов. Например, при когерентной демодуляции сигналов с двоичной фазовой модуляцией, подверженных воздействию аддитивного белого гауссовского шума, жесткие решения формируются путем сравнения выходного сигнала интегратора со сбросом в знаковом компараторе с нулевым порогом. Условные вероятности ошибки зависят только от отношения энергии сигналов Е, к односторонней спектральной плотности шума No..
При мягких решениях формируются не только оценки переданных кодовых символов, но и дополнительные указатели надежности сделанных оценок. Например, в рассмотренном выше примере мягкие решения можно формировать сравнением выход- ного сигнала интегратора со сбросом в многопороговом компараторе с несколькими порогами, т.е. многобитовым квантованием. При трехбитовом квантовании значения двух младших битов можно рассматривать в качестве указателей надежности сделанных оценок.
В декодере осуществляется обратная операция: по принятой последовательности символов определяется наиболее вероятное переданное кодовое слово. Если все переданные кодовые слова равновероятны, а канал связи не имеет памяти, то в качестве наиболее вероятного пере- данного слова при жестких решениях в демодуляторе выбирается то, которое ближе всех в смысле расстояния Хэмминга находится к принятому кодовому слову. Расстояние Хэмминга между последовательностями Y и Z оценивается как вес (число двоичных единиц) слова, образованного посимвольным сложением по модулю 2 последовательностей Y и Z.
Наиболее характерной ситуацией использования кодирования является передача дискретных сообщений в реальном времени при ограниченной мощности передатчика. Это означает, что и-символьное кодовое слово должно быть передано за время, равное времени выдачи k символов источником сообщения. Если это условие не выполняется, то кодирование не имеет смысла, поскольку последовательность передаваемых символов сообщения может быть считана с меньшей скоростью. В результате характеристики помехоустойчивости могут быть улучшены за счет увеличения энергии передаваемых символов. Пусть мощность передатчика равна P, а длительность сообщения, содержащего k символов, равна Т. Тогда энергия сигнала, приходящаяся на слово сообщения, равна РТ.
В случае блокового избыточного кодирования имеющаяся энергия распределяется на и символов, поэтому энергия, приходящаяся на кодовый символ, равна РТ/и. Так как n>k, то при использовании кодирования энергия, приходящаяся на символ, уменьшается. Это приводит к тому, что в системе с избыточным кодированием, вероятность ошибки на символ оказывается выше, чем в системе без кодирования. Если код обладает высокой корректирующей способностью, то благодаря наличию избыточных символов эти потери «отыгрываются» и обеспечивается дополнительный выигрыш, который принято называть энергетическим выигрышем кодирования (ЭВК). ЭВК является количественной мерой эффективности кодирования. Его значения оценивают, сопоставляя энергетические затраты на передачу одного бита при фиксированных вероятностях ошибочного приема либо символа, либо бита сообщения в системах с кодированием и без кодирования. Существующие к настоящему времени коды с избыточностью, корректирующие коды, можно разбить на два широких класса: блоковые и сверхточные.
Если обозначить вероятность ошибки при приеме символов в
системах без кодирования и с блоковым кодированием соответственно р, и р, то вероятности ошибочного приема в системе без кодирования и с кодированием будут определяться соответственно выражениями:
Здесь предполагается, что код имеет минимальное Хэммингов расстояние и исправляет все ошибки кратности

— количество возможных конфигураций из и символов, i! (n- i)!
содержащих i ошибок.
Между параметрами и, k и t блокового кода существует определенное соотношение, устанавливаемое так называемой границей Хэмминга

Коды, для которых соотношение (3.3) выполняется строго, называются совершенными. Примером совершенных кодов служит код Хэмминга, исправляющий одиночные ошибки, и код Голея. Другие коды могут исправлять некоторые конфигурации ошибок, кратность которых превышает 1. Для этих кодов (3.3) следует трактовать как полезную верхнюю границу.
В табл.3.1 приведены примеры блоковых кодов, исправляющих ошибки кратности t. и их параметры.
Блоковые коды можно использовать и для обнаружения ошибок кратности и. В этом случае минимальное Хэммингово расстояние между словами кода должно быть
Если блоковый код предназначен для исправления и обнаружения ошибок кратности t и и соответственно, то минимальное кодовое расстояние должно удовлетворять условию
3.3. ОСНОВНЫЕ КЛАССЫ БЛОКОВЫХ КОДОВ
КОД ПОВТОРЕНИЙ
Блоковый код вида (п,1) известен как код повторений. В нем значение информационного символа повторяется (и — 1) раз, т.е. (и-1) проверочных символов являются повторением информационного. Кодовая скорость равна 1/и и при достаточно больших и оказывается крайне низкой. Минимальное расстояние кода равно п и при достаточно больших и коды повторений обладают высокой исправляющей способностью. Поскольку минимальное расстояние равно п, то кратность исправляемых ошибок в кодовом слове будет составлять t = {n — 1)/2. Вероятность ошибочного декодирования

ЛИНЕЙНЫЕ БЛОКОВЫЕ КОДЫ
В линейном блоковом коде 1-й символ кодового слова

представляет собой линейную комбинацию k информационных
символов. В матричной форме записи
![]()
где G — порождающая матрица кода, содержащая k строк и и столбцов
Таким образом, процедура конструирования кода сводится к определению элементов д;, порождающей матрицы.
Поскольку для систематического кода первые k символов кодового слова В являются информационными символами слова А, т.е. то порождающая матрица кода имеет вид
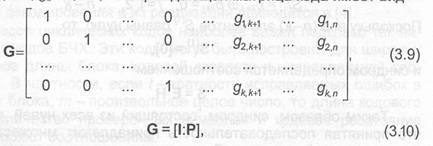
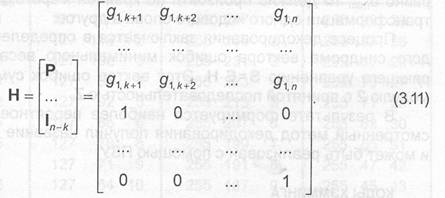
где I — единичная матрица kxk Р представляет последние (n — k) столбцов порождающей матрицы.
С порождающей матрицей линейного кода связана так называемая проверочная матрица
Декодирование линейного кода осуществляется умножением выходной последовательности Z демодулятора на проверочную матрицу Н, в результате которого формируется слово, так называемый синдром S:
S=Z Н.
Для двоичных кодов выходная последовательность Z может быть представлена в виде суммы по модулю 2 переданного кодового слова В и вектора ошибок Е. Поэтому синдром может быть представлен как

Согласно (3.10) элемент может быть записан как
Для систематических кодов, поэтому

Из уравнения (3.10) следует, что
![]()
Следовательно,
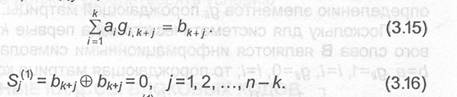

Таким образом, синдром, состоящий из всех нулей, означает,
что принятая последовательность принадлежит множеству кодовых слов линейного кода. Это означает, что при приеме либо не произошло ни одной ошибки, либо конфигурация ошибок оказалась такой, что трансформировала переданное кодовое слово в другое кодовое слово. Если минимальное кодовое расстояние кода равно то должно произойти по крайней мере ошибок при трансформации одного кодового слова в другое.
Процесс декодирования заключается в определении для каждого синдрома вектора ошибок минимального веса, удовлетворяющего уравнению
![]()
Этот вектор ошибок суммируется по модулю 2 с принятой последовательностью Z.
В результате формируется наиболее вероятное слово. Рассмотренный метод декодирования получил название синдромного и может быть реализован с помощью ПЗУ.
коды хэмминга.
Эти коды являются примером линейных кодов, исправляющих одну единственную ошибку. Длина блока кодов удовлетворяет соотношению, количество проверочных символов. Например, при и — k=3 получаем код (7,4).
ЦИКЛИЧЕСКИЕ КОДЫ
Эти коды также относятся к классу линейных блоковых кодов и являются наиболее распространенными. Особенность этих кодов состоит в том, что если некоторое кодовое слово принадлежит коду, то и его циклические перестановки также принадлежат коду.
Иными словами (и — 1) кодовых слов могут быть сформированы путем циклического сдвига одного кодового слова. Все множество кодовых слов может быть получено в результате циклических сдвигов различных кодовых слов. Достоинство этого класса кодов заключается в относительно простой аппаратурной реализации кодеков, основными элементами которой являются регистры сдвига и сумматоры по модулю 2.
Кодирование и вычисление синдрома при декодировании могут быть осуществлены с помощью либо k-разрядного, либо (n — k)- разрядного сдвига.
Подробное описание свойств циклических кодов, а также алгоритмов декодирования и из реализации приводится в [4].
В классе циклических кодов наиболее важен подкласс так называемых кодов БЧХ. Эти коды могут быть построены для широких диапазонов длины блока, кодовой скорости и исправляющей способности. В частности, если t — кратность исправляемых ошибок в пределах блока, m — произвольное целое число, то длина кодового слова, количество проверочных символов и кодовое расстояние удовлетворяют соотношениям:
В табл.3.2 в качестве примера приведены соотношения между;: . параметрами некоторых кодов БЧХ. Отметим, что при t=1 параметры и и k соответствуют параметрам кода Хэмминга. Иначе говоря, код Хэмминга также является кодом БЧХ, исправляющим одиночные ошибки.
КОДЫ РИДА-СОЛОМОНА
Коды Рида — Соломона (коды PC) относятся к классу недвоичных кодов БЧХ. В кодере сообщение, состоящее из k q-ичных символов, выбираемых из алфавита, содержащего q=2 символов, преобразуется в кодовое слово РС-кода, содержащее и двоичных символов. Поскольку обычны входного и выходного алфавитов равны степени 2, то входные и выходные символы могут быть представлены m-разрядными двоичными словами. Таким образом, входное сообщение можно рассматривать как km-разрядное слово, а выходное кодовое слово — как nm-разрядное двоичное слово. Длина кода РС равна n=q-1. Если исправляющая способность кода равна t ошибочным символам, то имеет место соотношение и — k=2t. Коды РС существуют при 1(К(п — 2, а их расширение имеет длины блока: n=q и n=q+1.
КОД ГОЛАЯ
Этот код относится к числу наиболее интересных. Он позволяет исправить ошибки высокой кратности (t)1) и является также совершенным кодом. Код Голея (23,12) является циклическим и исправляет все конфигурации ошибок, кратность которых не превышает трех. С кодом Голея (23,12) связан код (24,12), который образуется добавлением к кодовым словам кода (28,12) дополни- тельного проверочного символа. Коды (23,12) и (24,12) имеют минимальное кодовое расстояние, равное соответственно 7 и 8. По- этому код (24,12), кроме исправления ошибок кратности 3, обеспечивает обнаружение ошибок кратности 4 при незначительном изменении кодовой скорости. Код (24,12) относится в числу наиболее распространенных.
3.4. ВЕРОЯТНОСТИ ОШИБОЧНОГО ПРИЕМА СООБЩЕНИЯ И ДВОИЧНОГО СИМВОЛА (БИТА)
При оценке энергетического выигрыша кодирования кодов, различающихся длиной блока и кодовой скоростью, более удобной оказывается характеристика помехоустойчивости, выражаемая через вероятность ошибки на двоичный символ (бит).
Соотношение между вероятностями ошибки декодирования слова и ошибки на бит определяется структурой порождающей матрицы конкретного кода. Однако для обобщенного анализа могут быть получены простые границы для вероятности ошибки на бит. Пусть длительность сеанса связи составляет 1с. Тогда за сеанс связи может быть передано 1/Т кодовых слов, которые содержат k/Т информационных символов. Количество ошибочно принятых кодовых слов равно. Если через k обозначить количества ошибочно принятых информационных символов при каждом ошибочно принятом кодовом слове,. то вероятность ошибки на бит будет равна
Проблема заключается в определении величины k<>. В наихудшем случае ошибочный прием кодового слова сопровождается ошибочным приемом всех k информационных символов. Тогда получаем верхнюю границу
В лучшем случае ошибочный прием кодового слова приводит к единственной ошибке в информационных символах. Поэтому для нижней границы имеем К,=1 и

Для малых значений k верхняя и нижняя границы становятся
строгими, и для оценки вероятности ошибки на бит может быть использована вероятность ошибочного приема слова. Для высоких значений E>IN, вероятность ошибки на символ оказывается чрезвычайно малой и ошибки при декодировании кодовых слов с большой вероятностью возникают при появлении (t+1) ошибочных символов. Из этих (t+1) ошибочных символов в среднем (t+1)klи относится к информационным. В результате
На рис.3.2. приведены характеристики некоторых блоковых кодов, которые получены применительно к системе связи, использующей двоичную ФМ, когерентную демодуляцию с жесткими решениями в демодуляторе.
Сверточные (или рекуррентные) коды отличаются от блоковых кодов структурой. В блоковом коде и символов кода, формируемых кодером любой выбранный интервал времени, зависят только от k информационных символов, поступивших на его вход в течение этого же интервала времени. В сверточном коде блок из и символа кода, формируемых кодером в любой выбранный интервал времени, зависит не только от k информационных символов, по- ступивших на его вход в течение этого же интервала времени, но и от информационных символов, поступивших в течение (К — 1) предыдущих интервалов. Параметр К называется длиной кодового ограничении. Для сверточных кодов значение параметров и и k выбираются .малыми. Сверточные коды могут использоваться для исправления случайных ошибок, ошибок, группирующихся в пакеты, и для тех и, других. Кодер двоичного сверточного кода содержит kK-разрядный регистр и и сумматоров по mod2. Обобщенная структурная схема кодера сверточного кода приведена на рис.3.3.
На рис.3.4 приведены пример кодера сверточного кода с параметрами k=1, n=2, К=З, 1/2. Информационные символы по- ступают на вход регистра, а символы кода формируются на выходе коммутатора. Коммутатор (КМ) последовательно опрашивает вы- ходы сумматоров по mod 2 в течение интервала времени, равного длительности информационного символа (бита).
Схема подключения сумматоров по mod2, значения k ,п и К полностью описывают сверточный код. Их можно определить с помощью генераторных векторов или многочленов. Например, сверточный код, формируемый кодером, изображенным на рис.3.4,
имеет порождающие векторы д,=111 и д,=1О1 и порождающие многочлены д,(х)=х~+х+1: и д,(х)=х~+1. Кроме того, сверточный код может быть задан импульсной характеристикой, определяемой как последовательность символов кода на выходе кодера подаче на его вход единственного символа 1. Легко проверить; что импульсная характеристика данного кода равна 111011. Так операция сложения появляется линейной операцией, сверточные коды относятся к классу линейных и выходная последовательность кодера может рассматриваться как результат свертки входной последовательности с импульсной характеристикой кодера. Отсюда и происходит название коды и метода кодирования.
Процедуры кодирования и декодирования удобно описывать с помощью так называемого кодового дерева, которое отображает последовательности на выходе кодера для любой. возможной входной последовательности. На рис.3.5 приведено кодовое дерево кодера, изображенного на рис.3.4, для блока из. пяти информационных символов. Если первый, символ принимает значение О, то на выходе кодера формируется пара символов ОО. Если первый символ принимает значение 1, то на выходе кодера формируется пара символов 11. Это показано с помощью двух ветвей, которые выходят из начального узла. Верхняя ветвь соответствует О, нижняя — 1. В каждом из последующих узлов ветвление происходит аналогичным образом: из каждого узла исходит две ветви, причем верхняя ветвь соответствует О, а нижняя -1. Ветвление будет про- исходить вплоть до последнего символа входного блока. Вслед за ним все входные символы принимают значение О, и образуется только одна обрывающаяся ветвь. Таким образом, каждой из возможных входных комбинаций информационных символов соответствует своя вершина на кодовом дереве. В данном случае имеется 32 вершины. С помощью кодового дерева легко построить выходную последовательность символов кода, соответствующую определенной входной последовательности. Например, входной по- следовательности 11010 соответствует выходная последовательность, лежащая на пути, изображенном пунктирной линией. Анализируя
структуру кодового дерева на рис.3.5, можно заметить, что, начиная с узлов третьего уровня, она носит повторяющийся характер. Действительно, группа ветвей, заключенных в прямоугольники, изображенные пунктирными линиями, полностью совпадают. Это означает, что при поступлении на вход четвертого символа выходной символ кода будет одним и тем же, независимо от того, каким был первый входной символ: 0 или 1. Другими словами, после первых трех групп выходных символов кода входные последовательности будут порождать один и тот же выходной символ.
Обозначим четыре узла третьего уровня, т.е. узлы, в которых происходит третье ветвление, буквами а, b, с, d. Повторяющаяся структура ветвей имеет место и для узлов четвертого и пятого уровней, поэтому их также можно обозначить этими же буквами. Для узлов пятого уровня любой из четырех комбинаций (11,10,01, 00) первых двух входных символов будет соответствовать один и тот же выходной символ.
Такое поведение можно объяснить следующим образом. Когда входной символ поступает в регистр (входной разряд RД), то выходные символы зависят не только от символа, записанного в R,, но и от двух предыдущих символов, хранящихся в R, и Я,. Имеется четыре возможные комбинации символов, хранящихся в R, и R>. 00,01,10,11. Обозначим эти четыре комбинации или состояния регистра сдвига соответственно буквами а, с, d как показано на рис.3.5. Количество состояний равно 2
Входные символы 0 и 1 будут формировать четыре различные комбинации выходных символов в зависимости от состояния кодера. Если входной символ О, то на выходе декодера будут формироваться 00,10,11 или 01 в зависимости от того, в каком состоянии находился кодер: а, Ь, с или d. То же самое правило можно приме- нить относительно символа 1.
Таким образом, поведение кодера можно полностью описать с помощью диаграммы состояний, изображенной на рис.3.6,а или направленного графа с четырьмя состояниями (рис.3.6,б) который устанавливает однозначное соответствие между входными и выходными символами кодера. На графе сплошные линии соответствуют входному символу О, а пунктирные — символу 1. Например, если кодер находится в состоянии а и на вход поступает 1, то на выходе декодера будет формироваться комбинация 11 (пунктирная линия) и декодер перейдет в состояние , соответствующее R,=О и R,=1. Аналогичным образом при поступлении 0 декодер останется в состоянии а (сплошная линия) и на выходе будет формироваться комбинация 00.
Заметим, что прямой переход из состояния а в состояние с или d невозможен, причем из любого состояния прямой переход возможен только в одно из двух состояний. Диаграмма состояний содержит исчерпывающую информацию о структуре кодового дерева.
Другим полезным способом описания кодового дерева является решетчатая диаграмма, изображенная на рис.3.7. Диаграмма берет начало из состояния а и на ней отображаются все возможные переходы при поступлении на вход очередного символа. Сплошным линиям соответствуют переходы, происходящие при поступлении символа 1 пунктирным — символа О. При поступлении на вход двух символов кодер оказывается в одном из четырех состояний: а, b, с или б. Заметим, что решетчатая диаграмма имеет повторяющийся характер и может быть легко построена с помощью диаграммы состояний.
3.6. АЛГОРИТМЫ ДЕКОДИРОВАНИЯ СВЕРТОЧНЫХ КОДОВ
АЛГОРИТМ ДЕКОДИРОВАНИЯ ВИТЕРБИ МИ
Среди различных алгоритмов декодирования сверточных кодов алгоритм максимального правдоподобия Витерби (АВ) получил наиболее широкое распространение в системах связи, в которых необходимо обеспечить экономию энергетического ресурса.
При декодировании в соответствии с критерием максимального правдоподобия выбирается то кодовое слово из множества возможных, которое ближе всего располагается к принятому кодовому слову в пространстве кодовых слов. Поскольку имеется 2 кодовых слов, то при реализации алгоритма максимального правдоподобия необходимо обеспечить запоминание всех кодовых слов и их сравнение с принятым словом. С увеличением К сложность вычислений и, следовательно, декодера возрастают.
Витерби предложил упрощенную процедуру вычислений при реализации алгоритма максимального правдоподобия. Он заметил, что каждый из четырех узлов имеет только двух предшественников, т.е. каждый из этих узлов можно достичь, минуя только два узла (см. рис.3.7), и только один путь, который соответствует по- следовательности, наиболее «близкой» к принятой последовательности (путь с минимальным расстоянием), следует сохранять для каждого узла.
Обратимся к решетчатой диаграмме, изображенной на рис.3.7. Задача состоит в том, чтобы для некоторой принятой последовательности символов найти путь на решетчатой диаграмме, соответствующий выходной последовательности символов, в максимальной степени совпадающей с принятой последовательностью.
Предположим, что первые шесть символов последовательности есть 0100 01. Рассмотрим два пути, состоящих из трех ветвей (для шести символов) и заканчивающихся в узлах а, с и d. Из двух путей сохраним лишь тот, который в максимальной степени согласуется с последовательностью О10001 (путь с минимальным расстоянием). Оставшийся для каждого узла такой путь будем называть «выжившим».
Имеется два пути в узел третьего уровня а: 00 00 00 и 11,10 11. Эти пути имеют расстояния от принятой последовательности 0100 01, равные соответственно 2 и 3. Выжившим путем вычисления расстояния следует считать путь 000000. Процедуру повторим для узлов b, с и d. Например, для узла с имеются два пути, со- ответствующих выходным последовательностям 001110 и 11 0101 и имеющих расстояния, соответственно равные 5 и 2. Выжившим следует считать путь 110101. Аналогичным образом производится отбор выживших путей для узлов b и d. В результате из восьми возможных путей сохраняются только четыре. Причина, по которой отбрасываются четыре пути, состоит в следующем. Два пути, сходящиеся, например, в узле третьего уровня а, имеют два одинаковых первых символа 00. Следовательно, независимо от последующих символов оба пути должны сойтись именно в этом узле а и в будущем выродиться в один.
Таким образом, необходимо запомнить четыре выживших пути и их расстояние от принятой последовательности. В общем случае количество выживших путей равно количеству состояний, т.е. 2
Теперь рассмотрим два очередных принятых символа. Допустим принимается последовательность символов 01000100. Сравним два выживших пути, которые сходятся в узле а четвертого уровня. Они могут выходить только из узлов а и с третьего уровня и соответствовать последовательностям 00 00 00 00 и 11010111, которые имеют расстояния, соответственно равные 2 и 4 от принятой последовательности 01000100. Следовательно, путь 00 0000 00 следует считать выжившим для узла а четвертого уровня. Далее аналогичная процедура отбора повторяется для узлов с и d.
Отметим, что до окончания декодирования сохраняются толь- ко четыре конкурирующих пути, которые соответствуют выжившим путям для узлов а, b ,с и d. Остается решить вопрос, когда произвести усечение алгоритма и принять решение в пользу одного из четырех оставшихся путей. Это можно сделать принудительно, положив последние два информационных символа равными 00, т.е. осуществить сброс. При поступлении на вход регистра первого символа 0 необходимо рассматривать выжившие пути только для узлов а и с, поскольку переход в узлы b и d возможен только при поступлении на вход символа 1. При поступлении на вход регистра второго символа 0 необходимо рассмотреть только выжившие пути, сходящиеся в узле а, поскольку при поступлении символов 00 декодер должен перейти в состояние а.
При реализации алгоритма Витерби объем памяти и сложность вычислений пропорциональна 2, поэтому его целесообразно использовать при длине кодового ограничения К<10. При больших длинах кодового ограничения, которые необходимы для достижения низких значений вероятности ошибки, обычно используется алгоритм последовательного декодирования.
АЛГОРИТМ ПОСЛЕДОВАТЕЛЬНОГО ДЕКОДИРОВАНИЯ
При последовательном декодировании, алгоритм которого был предложен, сложность декодера возрастает линейно с.увеличением длины кодового ограничения. Для описания особенностей алгоритма рассмотрим кодер с К=4 и n 3, изображенный на рис.3.8. Кодовое дерево сверточного кода показано на рис.3.9. Здесь каждый входной информационный символ порождает три кодовых символа и оказывает влияние на четыре группы из трех символов. При декодировании будем рассматривать только три (или n) символа одновременно, чтобы принять промежуточное решение, предполагающее возможность его изменения при возникновении трудностей в дальнейшем.
Декодер, реализующий алгоритм последовательного декодирования, можно сравнить с водителем, который случайно принимает
неверные решения при разветвлении дороги, но быстро обнаруживает свои ошибки (по дорожным указателям), возвращается назад и движется по новому пути.
Применительно к рассматриваемому алгоритму это означает следующее. Из начального узла и, для первых трех принятых сим- волов имеется два пути длиной три символа. Выбирается тот путь, который соответствует последовательности, имеющая наименьшее расстояние Хэмминга от первых трех принятых символов. В результате выбирается наиболее вероятный узел. Из этого узла вы- ходят также два пути длиной, равной трем символам. Для второй группы из трех принятых символов также выбирается путь, соответствующий последовательности с минимальным расстоянием Хэмминга, и осуществляется переход в четвертый узел. Если имеет место большое количество ошибок в определенных группах из и принятых символов, то будет выбран ошибочный путь, при движении по которому будут возникать трудности согласования принятой последовательности символов с последовательностями, соответствующими ложному узлу. Это служит основанием для того, чтобы сделать вывод о наличии ошибки при выборе пути.
Поясним это на примере. Предположим, что входная последовательность информационных символов 11010 поступает на вход кодера, изображенного на рис.3.8. Так как К=4, то необходимо до- полнить эту последовательность последовательностью 000, которая обеспечивает окончание процедуры декодирования. Поэтому последовательность информационных символов, дополненная последовательностью «сброса», будет иметь структуру 11010000.
Согласно кодовому дереву, изображенному на рис.3.9, последовательность кодовых символов будет 111 101 001 111001 011 011 000. Пусть принимаемая последовательность, содержащая три ошибки (одну в первой группе символов и две во второй), будет 101 011 001111 001 011 011 000. Процедура декодирования начинается с узла и. Первая группа символов 101 ближе всего к последовательности 111, поэтому при правильном решении происходит пере- ход к узлу и,. Однако вторая группа символов 011, содержащая две ошибки, оказывается ближе к последовательности 010, а не к истинной последовательности 101. Поэтому происходит переход не к истинному узлу и,, а к ложному и,. Начиная с этого узла процесс идет по ложному пути, поэтому принятая последовательность не будет согласована с любой последовательностью, начинающейся
в узле и,.
Третья группа принятых символов 001 не будет согласована с любой последовательностью, начинающейся в а,, например 001 или 100, и она оказывается ближе к последовательности 011. По- этому происходит в узел и..
Четвертая группа принятых символов 111 снова оказывается несогласованной с любой из последовательностей, начинающихся в узле и,, например 011 или 100, и она оказывается ближе к последовательности 011. В этом случае произойдет переход в узел. Можно заметить, что расстояние Хэмминга между последовательностью, соответствующей пути между узлами, и содержащей 12 символов, равно 4. Это показывает, что имеют место четыре ошибки при условии, что выбранный путь является правильным.
Такое большое количество ошибок должно вызвать подозрение. Действительно, если вероятность ошибки в двоичном символе равна Р, то среднее значение количества ошибок п Е в блоке, содержащем d символов, равно Р. Поскольку значение Р обычно лежит в пределах от 10 ' до 10 ", то такое количество ошибок в блоке, содержащем 12 символов, представляется неправдоподобным. Поэтому следует возвратиться к узлу и, и двигаться по нижнему пути, который ведет к узлу и,. Однако путь через узлы п,, и,, и,, и,, и, оказывается еще хуже с предыдущего, поскольку он соответствует наличию пяти ошибок в блоке из 12 символов. Поэтому происходит возвращение к узлу и, и движение по пути, при- водящему в узел и,, и так далее до тех пор, пока не будет найден путь, проходящий через узлы, и соответствующий наличию трех ошибок. Если предположить, что возвращение про- изойдет в узел и,, и попытаться найти другие пути, то среди них не найдется ни одного, который соответствовал бы наличию менее пяти ошибок.
Поэтому в качестве правильного принимается путь, проходящий через узлы. Этому пути соответствует первый декодированный символ 1. Далее процедура продолжается с целью декодирования второго символа, начиная с узла с отбрасыванием первых трех принятых символов, и она повторяется до тех пор, пока не будут декодированы все символы.
Одним из основных является вопрос о выборе критерия, согласно которому выносится решение о выборе ложного пути. Зависимость математического ожидания количества ошибок п Е от числа декодируемых символов d представляет собой прямую (nE = Р,d) с наклоном, определяемым значением Р, которая приведена на рис.3.10. Там же показано истинное значение количества ошибок, соответствующее выбранному пути. Если количество ошибок лежит в допустимых пределах, установленных пороговым уровнем, то декодирование продолжается. В противном случае происходит переход назад к ближайшему узлу и предпринимаются попытки найти другой путь. Если количество ошибок продолжает расти, то возвращение осуществляется к следующему по порядку узлу, и так до тех пор, пока количество ошибок не окажется в допустимых пределах.
Если значение порогового уровня выбрать близким к математическому ожиданию количества ошибок, то это сократит средний объем вычислений. С другой стороны, если значение порогового
уровня установить слишком «жестким» (т.е. очень близким к математическому ожиданию количества ошибок), то при декодировании будут отбрасываться все возможные пути в некоторых чрезвычайно редких случаях, когда из-за воздействия шума может произойти необычайно большое количество ошибок. Это явление может быть устранено путем выбора «жесткого» порогового уровня в начале процесса декодирования, и если при декодировании происходит отбрасывание всех путей, то пороговый уровень постепенно увеличивается до тех пор, пока не окажется приемлемым один из возможных путей.
Установлено, что при последовательном декодировании вероятность ошибки с увеличением К уменьшается по экспоненциальному закону, а его сложность — по линейному. При этом среднее число анализируемых ложных путей на один декодируемый символ остается ограниченным, если величина оказывается меньше так называемой предельной вычислительной скорости .
Алгоритму последовательного декодирования присущи следующие недостатки:
• количество ложных участков и, следовательно, вычислительная сложность является случайной величиной, зависящей от уровня шума в канале связи;
• для снижения необходимого объема памяти скорость декодирования должна в 10...20 раз превышать скорость поступления входных данных, что ограничивает максимальную скорость передачи сообщений;
• среднее количество анализируемых ложных участков пути эпизодически может оказаться чрезвычайно большим и привести к переполнению памяти, а это может вызывать появление сравнительно длинных выходных последовательностей, содержащих большое количество ошибок.
Характеристики помехоустойчивости сверточных кодов при использовании этих алгоритмов из-за трудностей математического характера в основном могут быть получены методом математического моделирования. На рис.3.11 приведены характеристики помехоустойчивости некоторых сверточных кодов для системы связи, использующей двоичную ФМ и когерентную демодуляцию.
К наиболее просто реализуемым алгоритмам декодирования сверточных кодов относятся алгоритм декодирования с обратной связью и алгоритм порогового (мажоритарного) декодирования. Однако характеристики этих алгоритмов заметно уступают характеристикам первых двух.
ПОРОГОВОЕ ДЕКОДИРОВАНИЕ
Рассмотрим простой пример, про иллюстрирующий особенности алгоритма порогового декодирования. Структурная схема кодера изображена на рис.3.12,а. Пусть содержимое разрядов регистра есть а выходная последовательность.
Структурная схема порогового декодера, реализующая метод порогового декодирования Мэсси [4,6], изображена на рис.3.12,б.
Последовательность символов на входе кодера последовательность символов вектора ошибок, возникающих в канале связи при передаче первого и второго символов соответственно. Ключ находится в положении А при декодировании первого символа и в положении В при декодировании второго символа соответственно.
При соответствующих значениях отношения сигнал/шум в D3 и D4 содержится достаточно информации для надежного решения.
Вероятность появления ошибки при декодировании определяется вероятностью того, что в последовательности, имеет место более одной ошибки. Вероятность этого события .При малых значениях р, снижение вероятности ошибки становится ощутимым.
Идея каскадного кодирования поясняется рис.3.13. Один из кодов, так называемый внутренний, является двоичным (n ,k n) кодом. Другой код, так называемый внешний, является первичным (N,K) кодом. В качестве внешнего кода обычно выбирается код Рида — Соломона. Кодирование осуществляется следующим образом. Блок из k K информационных символов разделяется на К под- блоков, содержащих k двоичных символов каждый. Каждый из k символов сначала преобразуется кодером внешнего кода в кодовое слово, содержащее И подблоков. Затем каждый из И подблоков преобразуется кодером внешнего кода в двоичное кодовое слово, содержащее и символов. Множество И кодовых слов внутреннего кода является кодовым словом каскадного (N n, K k) года с кодовой скоростью.
Несмотря на сравнительно большую длину слова каскадного кода, сложность декодера увеличивается незначительно благодаря структурным свойствам каскадного кода, позволяющим осуществить декодирование в два этапа. Действительно, при декодировании на первом этапе декодером внутреннего кода И его кодовых слов преобразуются в N подблоков из k символов. Затем эти И подблоков декодируются в декодере внешнего кода в К подблоков из k символов каждый. Каскадные коды являются весьма мощным средством борьбы с независимыми и группирующимися в пакеты ошибками. С помощью внешнего кода можно исправить независимые ошибки, а с помощью внутреннего — группирующиеся ошибки.
Наиболее распространенной конфигурацией кода является следующая: внешний код — код Рида — Соломона, внутренний код сверточный код с малой длиной кодового ограничения и декодированием по алгоритму Витерби на основе мягких решений. Между кодером внешнего кода и кодером внутреннего кода обычно включается устройство перемежения символов, поскольку на выходе декодера Витерби ошибки имеют тенденцию к группированию.
Изменение по определенному правилу естественного порядка следования символов в некоторой кодовой последовательности называют процедуру перемещением (Interleaving), обратную перемежению, принято называть деперемеженаем (deinterleaving). В результате выполнения процедуры деперемежения восстанавливается естественный порядок следования символов.
Методы перемежения -деперемежения обычно используются для разрушения пакетов ошибок, вызванных замираниями уровня принимаемого сигнала, и, следовательно, уменьшения степени группирования ошибок в последовательности символов, поступающих на вход канального декодера. При перемежении передаваемое кодовое слово формируется из символов различных кодовых слов. Поэтому при деперемежении возникающий пакет ошибок разбивается на отдельные ошибки, принадлежащие различным кодовым словам. Иначе говоря, при деперемежении пакет ошибок трансформируется в последовательность независимых ошибок, для исправления которых, как правило, можно использовать менее мощный код. С увеличением глубины перемежения можно ожидать улучшения характеристик помехоустойчивости, поскольку при этом происходит ослабление корреляции ошибок. Но при этом возрастает задержка в доставке сообщения, связанная с выполнением процедур перемежения- деперемежения. Поэтому приходится принимать компромиссное решение между степенью улучшения характеристик помехоустойчивости и возможной задержкой.
Рассмотрим некоторые эффективные методы перемежения.
БЛОКОВОЕ ПЕРЕМЕЩЕНИЕ
При блоковом перемежении кодовые слова длиной и символов записываются в виде таблицы шириной W и глубиной 0 сим- волов, как показано на рис.3.14.
Предположим, что W=n. Тогда строки таблицы представляют собой кодовые слова, содержащие k информационных символов и (и — k) проверочных символов. После заполнения таблицы осуществляется последовательное считывание символов по столбцам и их передача по каналу связи. В приемнике выполняется обратная процедура — последовательная запись символов по столбцам до полного заполнения таблицы. Затем производится считывание символов по строкам таблицы и их декодирование. Такой перемежитель позволяет разрушить пакет ошибок длиной , в результате чего в каждом кодовом слове будет не более одной ошибки.
Однако периодическая последовательность одиночных ошибок, отстоящих друг от друга на D символов, будет вызывать полное поражение ошибками некоторого одного слова. Задержка при выполнении процедур перемежения- деперемежения равна 2WD сим- волов. Объем памяти и перемежителя и деперемежителя составляет WD символов.
Другой возможный вариант выполнения перемежителя изображен на рис.3.15. Здесь информационные символы последовательно записываются по столбцам. Причем проверочные символы формируются из k информационных символов, разнесенных друг от друга в исходной последовательности на D символов. Считывание символов также осуществляется по столбцам. Преимуществом этого метода является передача информационных символов в естественном порядке следования и отсутствие задержки в перемежителе. Общая задержка составляет WD символов и обусловлена выполнением процедуры деперемежения. Параметры D и W перемежителя должны выбираться с таким расчетом, чтобы наиболее вероятные значения длины пакетов ошибок оказались меньше.
Однако этот тип перемежителя не обладает устойчивостью по отношению к периодической последовательности одиночных ошибок, разнесенных на О символов. В этой ситуации все символы в строке оказываются ошибочными и канальный декодер переполняется.
МЕЖБЛОКОВОЕ ПЕРЕМЕЩЕНИЕ
При межблоковом перемежении в качестве входного блока принимается блок из NB символов, и каждый блок из И символов распределяется между следующими В выходными блоками. Пусть х и у представляют собой соответственно входной и выходной символы перемежителя. Тогда правило отображения символа i-го входного блока в символ выходного блока можно определить следующим образом:
Пример межблокового перемежения при В=З и И=2 показан на рис.3.16. Здесь символы i-ro, (i+1)-го и (i+2)-го входных кодовых блоков обозначены соответственно а,b,с. Согласно приведенному правилу отображения
Отметим, что последовательно следующие символы /-го входного блока отображаются в символах очередных В выходных блоков с нерегулярным смещением позиций (i+Bt) в каждом блоке. Такое нерегулярное смещение позволяет рандомизировать влияние периодической помехи, действующей в канале связи. Для однозначного отображения символов необходимо, чтобы В и И не имели общего делителя. Это ограничивает свободу выбора длины блока из BN символов. Недостатки такого метода перемежения состоят в том, что здесь выходные символы распределяются в пределах В блоков и общая задержка составляет В И символов (BN символов из-за необходимости запоминания (В — 1)ВИ входных блоков для выполнения процедуры распределения символов).
СВЕРТОЧНОЕ ПЕРЕМЕЩЕНИЕ
Структурная схема сверточного перемежителя-деперемежителя приведена на рис.3.17. Предполагается, что имеется синхронизация мультиплексоров и демультиплексоров передатчика и приемника.
Демультиплексор осуществляет последовательное подключение выхода кодера к различным строкам памяти перемежи- теля. Мультиплексор соответственно подключает вход декодера к различным строкам памяти деперемежителя. Каждая строка памяти представляет собой регистр сдвига, количество элементов задержки которого указано соответствующим числом, вписанным в прямоугольник. Первый элемент кодированной последовательности записывается в верхнюю строку и сразу же передается по каналу связи. Записывается он также в первую строку памяти деперемежителя, обеспечивающей задержку на (В — 1)М символов. Второй элемент кодированной последовательности записывается во вторую строку памяти перемежителя, обеспечивающей задержку на М символов. Таким образом, смежные символы кодированной последовательности оказываются разнесенными на М символов. Поэтому на них не оказывают влияние пакеты ошибок, длина которых не превышает М. При приеме второй символ дополнительно задерживается на (В — 2)М символов, так что общая задержка сим- волов составляет (В — 1)М символов. Следует отметить, что все символы кодовой последовательности после перемежения и деперемежения имеют одинаковую задержку, поэтому порядок следования символов на выходе кодера и входе декодера сохраняется одним и тем же.
3.9. АВТОМАТИЧЕСКИЙ ЗАПРОС ПОВТОРНОЙ ПЕРЕДАЧИ
В некоторых системах связи между передатчиком и приемником имеется двусторонняя линия связи, которую можно использовать для уведомления передающей стороны о наличии ошибок в принятом сообщении и для запроса повторной передачи искаженного сообщения.
Системы с исправлением ошибок, в которых принятые сообщения, содержащие ошибки, повторяются передающей стороной по запросам приемной стороны, принято называть системами с автоматическом запросом повторной передачи (АЗПП).
В системах с АЗПП на приемной стороне, как правило, выполняется только процедура обнаружения ошибок в принятом сообщении и не предпринимается никаких попыток их исправить. Поэтому в передаваемое сообщение вводится определенное количество избыточных битов или бит проверки на четность, образующих вместе с битами сообщения код с обнаружением ошибок. С увеличением количества избыточных битов возрастает обнаруживающая способность кода. Так как кодирование с обнаружением ошибок является простым, эффективным и достаточно устойчивым методом выявления искаженных сообщений, то системы с АЗПП позволяют простыми средствами обеспечить надежную передачу сообщений от источника к потребителю по каналам связи с раз- личными характеристиками. Поэтому АЗПП широко используется в системах передачи данных, в которых предъявляются повышенные требования к верности, например в компьютерной связи.
В соответствии с семиуровневой моделью взаимодействия открытых систем контроль ошибок относится к числу основных операций, которые могут выполняться на нескольких уровнях, в частности на транспортном уровне (4-й уровень) и уровне линий передачи данных (2-й уровень).
На уровне линий передачи данных пакеты сообщений, поступающие с выхода сетевого уровня (3-й уровня), перед передачей их в канал связи преобразуются в блоки (фреймы) путем добавления вспомогательных битов, образующих поля управления и про- верки ошибок. На рис.3.18 приведена примерная структура блока.
Длительность блока зависит от используемого протокола в линии передачи данных и может изменяться в пределах от 50 до 200 байт.
В общем случае система с АЗПП работает следующим образом. Принятые блоки, содержащие ошибки, повторно передаются до тех пор, пока они будут приняты без ошибок или ошибки в них не будут обнаружены. При этом обнаружение ошибок производится с помощью простого кода, обнаруживающего ошибки. Приемная сторона посылает по надежному обратному каналу передающей стороне подтверждения: положительные (ПП) или отрицательные (ОП) для указания отсутствия или наличия ошибок в ранее переданном блоке.

При получении положительного подтверждения передающая сторона передает очередной блок, а при получении отрицательного — повторяет передачу ранее переданного блока. В принципе, повторная передача одного и того же сообщения может происходить до тех пор, пока оно не будет принято без ошибок.
Из различных вариантов АЗПП можно выделить три базовых: АЗПП с остановом и ожиданием, АЗПП с возвращением на И блоков, АЗПП с селективным повторением.
АВТОМАТИЧЕСКИЙ ЗАПРОС ПОВТОРНОЙ ПЕРЕДАЧИ С ОСТАНОВОМ И ОЖИДАНИЕМ
При автоматическом запросе повторной передачи с остановом и ожиданием работа происходит следующим образом. Передающая и приемная стороны обмениваются сообщениями по полудуплексной линии связи. После передачи одного блока передающая сторона ожидает подтверждения со стороны приемной для того, чтобы передать очередной блок или повторить прежний. При получении блока приемная сторона передает в сторону передающей ПП, если принятый блок не содержит ошибок, и ОП, если принятый блок содержит ошибки. На рис.3.19 изображена временная диаграмма, иллюстрирующая процедуру передачи сообщений в системе с АЗПП с остановом и ожиданием.
Блоки сообщений Б1, Б2, БЗ, ... подлежат передаче. В момент времени t, передатчик передает блок Б1 и ожидает подтверждения со стороны приемника о качестве приема этого блока. Если в момент времени 1„блок Б1 был принят без ошибок, то посылается ПП1. Получив это подтверждение, передатчик в момент времени t, передает блок Б2, в котором в приемнике обнаруживаются ошибки и в момент времени t, посылается ОП2. Получив ОП2, передатчик в момент времени t4, передает блок Б2 повторно и ожидает ПП или ОП, которые поступят в момент времени. При получении ППЗ, как показано на рис.3.19, передатчик передает БЗ и т.д.
Очевидно, что при реализации АЗПП с остановом и ожиданием на передающем конце необходимо иметь буферное запоминающее устройство соответствующего объема для хранения пере- даваемых блоков сообщений до получения положительного подтверждения о приеме соответствующего блока.
Достоинство АЗПП с остановом и ожиданием заключается в его простоте. Однако он не очень приспособлен для современных высокоскоростных систем передачи цифровых сообщений из-за неэффективного использования канала связи из-за потерь времени на ожидание подтверждения перед передачей очередного блока. Эти потери становятся особенно существенными при характерных для спутниковых линий связи значительных задержках при распространении, превышающих время передачи блока.
АВТОМАТИЧЕСКИЙ ЗАПРОС ПОВТОРНОЙ ПЕРЕДАЧИ С ВОЗВРАЩЕНИЕМ НА N БЛОКОВ
В этом варианте АЗПП осуществляется непрерывная передача без ожидания подтверждений между блоками. Здесь между передатчиком и приемником необходимо иметь полнодуплексную линию, позволяющую передавать последовательность блоков со- общений, не ожидая получения положительного подтверждения. Фактически ПП можно даже не передавать. После обнаружения блока, содержащего ошибки, приемная сторона посылает ОП и отбрасывает этот и все последующие блоки до тех пор, пока ошибочный блок не будет принят без ошибок. При получении ОП в передатчике прерывается передача текущего блока и передаются ошибочный и все последующие блоки. Здесь также вводится нумерация блоков целыми числами г-.=0,1,2,...,2" — 1, а в структуру блока — поле номеров (k — количество разрядов в поле номеров).
На рис.3.20 изображена временная диаграмма, иллюстрирующая процедуру передачи сообщений в системе с АЗПП с возвращением на И блоков в случае N=7 (К=З). Передатчик передает последовательность блоков с номерами БО,Б1,Б2,...,Б6. Как показано на рис.3.20, в приемнике обнаруживается блок, содержащий ошибки (БЗ), посылается ОПЗ передатчику и отбрасываются этот и все последующие блоки Б4, Б5, Б6, которые уже были переданы передатчиком до получения ОПЗ из-за задержки при распространении.
Получив ОПЗ, передатчик повторно передает блоки БЗ, Б4, Б5, Б6 и далее последующие блоки БО, Б1, Б2, ... (здесь нумерация блоков производится по mod 2"). При обнаружении ошибок в любом последующем блоке эта процедура повторяется, начиная с блока, содержащего ошибки.
АЗПП с возвращением на И блоков является более эффективным по сравнению с АЗПП с остановом и ожиданием, поскольку здесь исключаются потери времени на ожидание подтверждений. Потери эффективности здесь связаны с отбрасыванием всех блоков, следующих за ошибочным блоком, даже если эти блоки не содержат ошибок.
АВТОМАТИЧЕСКИЙ ЗАПРОС ПОВТОРНОЙ ПЕРЕДАЧИ С СЕЛЕКТИВНЫМ ПОВТОРЕНИЕМ
Чтобы исключить потери эффективности, связанные с необходимостью повторной передачи безошибочных блоков, можно использовать процедуру селективного повторения. Здесь, как и в предыдущем варианте, необходима полнодуплексная линия связи. На рис.3.21 изображена временная диаграмма, иллюстрирующая процедуру передачи сообщений в системе с АЗПП и селективным повторением. Передатчик передает последовательность блоков Б1, Б2, БЗ, .... В приемнике обнаруживаются ошибки в блоке БЗ и посылается ОПЗ передатчику. Однако до его получения блоки Б4, Б5 и Б6 оказываются уже переданными. При получении ОПЗ в передатчике прекращается передача и вместо текущего блока Б7 повторно передается блок БЗ, а затем передача блоков возобновляется в естественном порядке.
Последовательность принятых блоков Б4, Б5, Б6, не содержащих ошибок, запоминается в приемнике до тех пор, пока не будет безошибочно принят блок БЗ и введен в соответствующее место для восстановления естественного порядка следования блоков в последовательности БЗ, Б4, Б5, Б6,...
Если блок БЗ будет безошибочно принят после первой повторной передачи, то запоминаются блоки Б4, Б5 и Б6. Однако, если в блоке БЗ будут обнаружены ошибки при повторной передаче, то возникает необходимость повторить его передачу еще раз. В этом случае надо запоминать блоки Б4, Б5, Б6, Б7, Б8, Б9. Требование многократных повторных передач приводит к увеличению объема буферного запоминающего устройства. Поскольку теоретически повторные передачи могут быть неограниченными, то при конечном объеме буферного запоминающего устройства возможно его переполнение. В практически используемых системах с АЗПП и селективным повторением для предотвращения этого события предусматривается специальный механизм прерываний.
Характеристики систем с АЗПП принято оценивать двумя величинами: относительной пропускной способностью и вероятностью необнаруженной ошибки в битах данных. Относительная пропускная способность определяется как отношение среднего числа битов сообщения, доставляемых получателю в единицу времени, к среднему числу битов, передаваемых в системе в единицу времени. Таким образом, значение относительной пропускной способности всегда меньше 100%. Например, при использовании кода, обнаруживающего ошибки, имеющего кодовую скорость RД=0,98, относительная пропускная способность при безошибочной передаче должна составлять 98%. Очевидно, что повторные передачи будут снижать значение относительной пропускной способности.
МЕТОДЫ МОДУЛЯЦИИ С РАСШИРЕНИЕМ СПЕКТРА
4.1. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Методы модуляции с расширением спектра сигналов первоначально нашли применение в военных и специальных системах связи, для которых характерны низкая вероятность перехвата и повышенная помехозащищенность [1]. Эти методы лежат в основе так называемой технологии расширения спектра сигналов, которая в последнее время начинает широко использоваться в коммерческих системах связи [2].
Технология расширения спектра сигналов заключается в преднамеренном увеличении в передатчике полосы частот, занимаемой сигналом-переносчиком сообщений и существенно превышающей ту, которая необходима для передачи с требуемыми скоростью и уровнем искажений, и обратном ее уменьшении до ин- формационной полосы частот в приемнике системы связи. В результате выполнения операции расширения спектра происходит уменьшение уровня спектральной плотности передаваемого сигнала, что затрудняет обнаружение факта работы системы связи и перехват передаваемых сообщений.
Благодаря низкому уровню спектральной плотности излучаемых сигналов с расширенным спектром системы связи могут использовать занятые участки радиочастотных диапазонов, не создавая существенных помех другим системам связи и службам.
При обратной операции сжатия спектра происходит восстановление первоначального спектра сигнала-переносчика сообщений и расширение, «размазывание» спектра сигналов преднамеренных и непреднамеренных помех. А поскольку в информационную полосу попадает лишь часть энергии сигналов, «размытой» в широкой полосе частот, то в результате обеспечивается увеличение отношения мощностей сигнала и помехи (отношение сигнал/помеха), определяемое соотношением полос до и после сжатия спектра сигнала. Процесс ослабления помехи при обработке сигналов с расширенным спектром условно показан на рис.4.1.
Известны несколько методов модуляции с расширением спектра сигнала, которые можно классифицировать в соответствии с
тем, по какому из четырех основных параметров радиосигнала: амплитуде, фазе, частоте или временному положению (задержке) осуществляется модуляция сигналом, расширяющим спектр.
Поскольку для обеспечения высокого КПД выходных каскадов передатчика амплитуду желательно сохранять постоянной, то к настоящему времени наибольшее распространение получили методы расширения спектра сигналов, основанные на изменении их фазы, частоты и временного положения (задержки) в соответствии с некоторым законом. Среди этих методов можно выделить следующие базовые:
• непосредственная модуляция несущей частоты псевдослучайной последовательностью (ПСП), иначе псевдослучайная частотная или фазовая манипуляция; в результате формируется так называемый сигнал с прямым расширением спектра (DSSS);
• программная перестройка рабочей частоты (ППРЧ), приводящая к формированию сигнала со скачкообразным изменением несу- щей частоты (FHSS);
• программная перестройка временного положения импульсных сигналов или псевдослучайная время-импульсная модуляция (ПВИМ). В итоге получаются импульсные сигнала со скачкообразным изменением временного положения (THSS);
• частотная модуляция по линейному закону (ЛЧМ); в этом случае мгновенная частота радиосигнала в течение интервала времени, равного длительности сигнала Т„либо нарастает, либо убывает по линейному закону (Chirp Modulation) и в результате формируются ЛЧМ сигналы с различными законами изменения частоты.
Рассмотрим систему связи, в которой осуществляется пере- дача дискретных сообщений со скоростью R бит/с. После модуляции с расширением спектра полоса передаваемого сигнала увеличивается до И/„Гц, причем WД»R>. Величину И/ будем называть шириной полосы сигнала с расширенным спектром. Пред- положим, что в канале связи кроме обычного теплового шума, имеющего одностороннюю спектральную плотность И,, Вт/Гц, действует помеха мощностью Р>, которая распределена в пределах полосы W>. После сжатия спектра ширина полосы полезного сигнала.
Например, при RД=5 кбит/с, И/„=20 МГц, EД/NД=20 и L,=2 коэффициент помехозащищенности М„=36 дБ — 13 дБ-3 дБ=20 дБ, т.е. мощность помехи может превышать мощность сигнала в 100 раз. ла снова становится равной R>, а спектральная плотность помехи — равной N,=РIWД. При этом спектральная плотность теплового шума останется неизменной. Отношение энергии сигнала, приходящейся на бит сообщения, к спектральной плотности эквивалентного шума определяется выражением
![]()
Если мощность помехи намного больше мощности теплового шума, то И~>>Ио, и (4.1) можно представить в следующем виде:
![]()
где Р/Р — отношение мощностей полезного сигнала и помехи, а WД/R,=G — коэффициент расширения полосы или выигрыш при обработке сигналов системы. Так как при оптимальной демодуляции сигналов вероятность ошибки зависит только от значения отношения E>IN то максимально допустимое превышение мощности помехи над мощностью сигнала полностью определяется значением выигрыша при обработке G. Если учесть возможные энергетические потери при реализации системы связи, то максимально допустимое превышение мощности помехи над мощностью сигнала, выраженное в децибеллах будет определяться так называемым коэффициентом помехозащищенности.
![]()
4.2. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ МОДУЛЯЦИИ С РАСШИРЕНИЕМ СПЕКТРА
ПРЯМОЕ РАСШИРЕНИЕ СПЕКТРА
Обобщенная структурная схема системы связи, использующей сигналы с прямым расширением спектра, изображена на рис.4.2. Она содержит источник дискретных сообщений, модулятор первой ступени, модулятор второй ступени, синтезатор частот, преобразователь частоты вверх, усилитель мощности, передающую и приемную антенны, преселектор, малошумящий усилитель, преобразователь частоты вниз, синтезатор частот, демодулятор второй ступени, демодулятор первой ступени, блоки поиска и синхронизации.
В модуляторе первой ступени осуществляется модуляция сиг- нала, как правило, промежуточной частоты сигналом передаваемо- ro дискретного сообщения d(t). На первой ступени модуляции могут быть использованы все рассмотренные ранее традиционные и не- традиционные виды модуляции: фазовая (ФМ), частотная (4M) и спектрально-эффективные: квадратурная, фазовая, квадратурная фазовая со сдвигом, квадратурная фазовая с фазовым сдвигом ч/4, частотная с минимальным частотным сдвигом и частотная с минимальным частотным сдвигом и гауссовской предмодуляционной фильтрацией. В результате формируется сигнал
![]()
где А1- амплитуда сигнала; (~- частота модулируемого гармонического колебания; 0(t) — изменения фазы, обусловленные передаваемым сообщением и зависящие от вида используемой модуляции; 0o(t) — случайная начальная фаза.
В модуляторе второй ступени осуществляется расширение спектра сигнала путем балансной модуляции сигналом расширения спектра в виде двоичной псевдослучайной последовательности (ПСП), формируемой генератором (ГПСП). На выходе модулятора второй ступени формируется сигнал с расширенным спектром

элементы ПСП, принимающие значения +1; (1) — функция, описывающая форму одиночного импульса сигнала ПСП.
После переноса на частоту излучения f, и усиления передается сигнал
![]()
В приемнике после предварительной селекции и усиления принимаемый сигнал переносится на промежуточную частоту для последующей обработки. В демодуляторе второй ступени осуществляется сжатие спектра входного сигнала путем его перемножения с опорной ПСП и последующей полосовой фильтрации. В результате на выходе полосового фильтра формируется сигнал
![]()
где К — коэффициент передачи приемопередающего тракта и среды распространения, черта сверху — символ временного усреднения; т и т — соответственно задержка модулирующей ПСП в точке приема и ее оценка, формируемая в блоке поиска и синхронизации.
При модуляция, расширяющая спектр сигнала, полностью устраняется и получается сигнал
![]()
который поступает на вход демодулятора первой ступени, где осуществляется выделение передаваемого сообщения 8(t).
Таким образом, необходимым условием сжатия спектра входного сигнала является наличие «жесткой» временной синхронизации модулирующей и опорной ПСП. Она обеспечивается блоком поиска и синхронизации и осуществляется в два этапа: на первом — устраняется начальная неопределенность в результате выполнения процедуры поиска с точностью до длительности Т> элемента ПСП, на втором-точная синхронизация. За счет работы следящей системы (системы слежения за задержкой) ошибки синхронизации уменьшаются до значений, не превышающих (О 05.01)То [4 3].
Поиск осуществляется, например, путем последовательного временного сдвига на величину 0,57> опорной ПСП через интервалы времени 7, и проверки наличия синхронизации модулирующей и опорной ПСП с помощью коррелятора и решающего устройства. Если сигнал на выходе коррелятора превышает пороговое значение, устанавливаемое в соответствии с выбранным критерием обнаружения, то поиск прекращается и включается система слежения за задержкой.
Система слежения за задержкой содержит временной дискриминатор, сглаживающий фильтр, перестраиваемый генератор тактовых импульсов и генератор опорных ПСП. Временной дискриминатор формирует управляющее напряжение под воздействием которого изменяется задержка тактовых импульсов и опорных ПСП до тех пор, пока управляющее напряжение не станет равным или близким нулю.
Трудности синхронизации генератора опорных ПСП с точностью до нескольких наносекунд ограничивают частоту следования символов ПСП значениями порядка десятков мегасимволов на секунду. Это означает, что ширина спектра сигнала при таком методе расширения спектра не может превышать нескольких десятков мегагерц.
Определим значение выигрыша при обработке, обеспечиваемого сигналом с прямым расширением спектра, полагая, что для передачи символов сообщения используется двоичная фазовая манипуляция, а для расширения спектра — двоичная случайная последовательность импульсов прямоугольной формы длительностью 7, и равновероятным появлением значений амплитуды +А и — А.
Спектральная плотность такой последовательности определяется следующим выражением:
![]()
где Т,— длительность двоичного символа сообщения (бита); L=7>i7,— отношение длительности двоичных символов передаваемого сообщения и последовательности, используемой для расширения спектра.
График спектральной плотности сигналов с прямым расширением спектра, построенный для положительных частот, изображен на рис.4.3. Там же показан график спектральной плотности обычного сигнала с двоичной фазовой манипуляцией. При его построении учтено соотношение длительностей импульсов модулирующих сигналов.
Если ширину полосы частот сигналов определить по первым нулям спектральной плотности, то выигрыш при обработке, обеспечиваемый сигналом с прямым расширением спектра, будет определяться следующим выражением:
где R,— частота следования символов последовательности, используемой для расширения спектра, W< — ширина полосы сигнала передаваемого сообщения.
Например, при R,=48 Мсимв/с, Я»=4,8 кбит/с имеем G=210 или 43 дБ.
ПРОГРАММНАЯ ПЕРЕСТРОЙКА РАБОЧЕЙ ЧАСТОТЫ
Обобщенная схема системы связи, использующей сигналы с программной перестройкой рабочей частоты (ППРЧ сигналы), изображена на рис.4.4. В основном она содержит те же элементы, что и система, показанная на рис.4.1. Отличие состоит в лишь том, что цифровые синтезаторы частот в преобразователях частот «вверх» и «вниз» являются программно-перестраиваемыми по псевдослучайному закону. Здесь в явном виде отсутствуют модулятор и демодулятор второй ступени, а их функции выполняют преобразователи частот «вверх» и «вниз».
На выходе преобразователя частоты «вверх» формируется сигнал

— функция, описывающая форму одиночного импульса длительностью Т,; (0Д) — последовательность случайных фаз, возникающих при перестройке частоты на интервале времени длительностью Т0, (f) — псевдослучайная последовательность частотных сдвигов; e(t) — изменения фазы, обусловленные модуляцией сигналом передаваемого сообщения.
Традиционно программная перестройка рабочей частоты используется в сочетании с двоичной многопозиционной частотной манипуляцией сигналом передаваемого сообщения. Перестройка частоты осуществляется путем непосредственного управления синтезатора сегментами ПСП, содержащими к символов. В результате диапазон изменения частоты несущей содержит 2 различных частот. При достаточно широком диапазоне и высокой скорости перестройки трудно сохранить непрерывность фазы несу- щей (фазовую когерентность). Этим объясняется включение последовательности (0) в модель сигнала (4.12).
Если рассматривать кратковременный спектр сигнала с ППРЧ, например, при усреднении за длительность интервала перестройки Т то ширина полосы будет почти такой же, как и обычного ЧМ сигнала. При длительном усреднении спектр и соответственно ширина полосы частот сигнала с ППРЧ будет определяться диапазоном перестройки частот синтезатора, которая может достигать нескольких гигагерц. Это значительно превышает значения, получаемые при прямом расширении спектра.
В преобразователе частоты «вниз» приемника частота опорного сигнала отличается от частоты принимаемого сигнала на значение промежуточной частоты (,. Поэтому на выходе преобразователя частоты «вниз»
![]()
При изменение частоты по закону ПСП полностью устраняется, спектр входного сигнала сжимается и получается сигнал
![]()
который поступает на вход демодулятора, осуществляющего выделение сигнала передаваемого сообщения 8(t).
Таким образом, необходимым условием сжатия спектра является совпадение по форме управляющих сигналов c(t) и c(t), определяющих изменение частоты соответственно входного и опорного сигналов. Выполнение этого условия обеспечивается блоком поиска и синхронизации в результате реализации процедур поиска и слежения, аналогичных тем, которые были рассмотрены выше.
В зависимости от соотношения между длительностями модулирующего (Т) и управляющего перестройкой частоты (Т) сигналов различают медленную (МППРЧ) и быструю (БППРЧ) программную перестройку рабочей частоты. В первом случае в течение интервала перестройки Т, может передаваться несколько символов сообщения, а во втором — один и тот же символ сообщения многократно передается на нескольких несущих частотах. Поэтому выполняются следующие соотношения:
Таким образом, скорость передачи элементов сигнала (скорость манипуляции) здесь определяется максимальной из двух- величин Rs=1/Т, и Rc=1/Т, и равна тактовой частоте.
Шаг перестройки, или расстояние между соседними частотами, определяется скоростью манипуляции, т.е. видом ППРЧ. В частности, при R,=R, и использовании ППРЧ в сочетании с многопозиционной частотной манипуляцией шаг перестройки равен рас- стоянию между соседними частотами сигнала с многопозиционной частотной манипуляцией. В случае некогерентной демодуляции, а именно этот алгоритм чаще всего используется в системах ППРЧЛМЧМ для соблюдения условия ортогональности сигналов в усиленном смысле, расстояние между соседними частотами выбирается кратным R,. При минимальном частотном разносе R, в пре- делах всей полосы частот И/„размещаются М=W//Я, рабочих час- тот или частотных каналов с равномерным шагом. Эти рабочие частоты в одном из вариантов можно разбить на М, неперекрывающихся частотных групп, каждая из которых занимает полосу шириной тЯ,=тЯ, (т — кратность частотной манипуляции). Пусть частоты, отображающие символы передаваемого сообщения, рас- полагаются симметрично относительно текущей частоты несущей. Тогда центральные частоты М,=2 частотных групп будут определять множество программно перестраиваемых рабочих частот. Перестройка осуществляется с помощью цифрового синтезатора частот, управляемого разрядными сегментами ПСП, формируемой генератором ПСП. Частота передаваемого сигнала в интервале времени Т, определяется комбинацией текущей частоты несущей и частоты, отображающей символ передаваемого сообщения. В другом варианте допускается перекрытие соседних частотных групп, содержащих т частот, при минимальном расстоянии между ними равном.
Пусть, как и в предыдущем варианте, центральные частоты частотных групп определяют множество программно перестраиваемых рабочих частот. Количество частот в множестве в этом случае увеличивается с М,=М/т до М — (т — 1), т.е. М»т (приблизительно в т раз). Определим значение выигрыша при обработке, обеспечиваемого сигналом с программной перестройкой рабочей частоты.
Если в синтезаторе формируется М частот с шагом М, то занимаемая сигналом с программной перестройкой рабочей частоты ширина полосы частот
В случае быстрой перестройки один и тот же символ сообщения передается на И различных частотах (кратность повторения равна И), поэтому Я=Я,=Я,И и выигрыш
![]()
Таким образом, для сигналов с быстрой ППРЧ выигрыш при обработке определяется не только количеством используемых частот М, но и кратностью повторения.
Следует подчеркнуть, что в случае быстрой ППРЧ при определении коэффициента помехозащищенности необходимо учитывать дополнительные энергетические потери, связанные с некогерентным сложением Я=Я,/Я, элементов сигнала, передаваемых на различных частотах. Это сложение осуществляется при формировании статистики, по которой производится оценка символа пере- даваемого сообщения в демодуляторе.
В заключение отметим, что линейную частотную модуляцию сигнала несущей в пределах длительности Т, элемента сигнала можно рассматривать как частный случай ППРЧ. Поэтому структурная схема системы связи с использованием ЛЧМ сигналов имеет структурную схему, подобную изображенной на рис.4.3.
ПРОГРАММНАЯ ПЕРЕСТРОЙКА ВРЕМЕННОГО ПОЛОЖЕНИЯ ИМПУЛЬСНЫХ СИГНАЛОВ
Характерной особенностью системы связи с программной перестройкой временного положения сигналов, изображенной на рис.4.5, является импульсный режим передачи. Поэтому для непрерывных источников дискретных сообщений передача осуществляется после предварительного преобразования в пакеты длительностью Т в пределах цикла длительностью Т. Пакет занимает определенный временной интервал (слот) в пределах цикла, а номер временного интервала определяется сегментом псевдослучайной последовательности, формируемой ГПСП. Устройство формирования пакетов осуществляет временное сжатие последовательностей символов передаваемого сообщения (трансформацию скорости). При этом скорость передачи по отношению к исходной увеличивается пропорционально коэффициенту сжатия. Отношение Т/Т характеризует скважность передачи. Для сохранения энергетического потенциала радиолинии неизменным приходится увеличивать излучаемую мощность пропорционально скважности.
Последовательность импульсных сигналов с программной перестройкой временного положения может быть представлена следующим образом:
— единичный импульс длительности Тр, М — количество временных слотов; cД — псевдослучайное число с равномерным законом распределения в интервале [1,М]; 0(1) — изменения фазы, вызванные модуляцией сигналом передаваемого сообщения.
Для обеспечения приема переданных пакетов необходимо, чтобы в приемнике ключ замыкался точно в ожидаемые моменты прихода пакетов. Это достигается путем строгого временного согласования генераторов ПСП передатчика и приемника. При выполнении этого условия ослабление помех происходит в результате временной селекции полезных сигналов. Определим значение выигрыша при обработке, обеспечиваемого при программной перестройке временного положения сигналов. Допустим, что в пределах цикла Т при наличии М временных слотов в каждом временном слоте необходимо передать k двоичных символов сообщения. Поэтому длительность элемента сигнала
![]()
где m — кратность манипуляции.
При фазовой манипуляции несущей и прямоугольной форме импульсов модулирующего сигнала необходимая ширина полосы частот, определяемая по первым нулям спектра, равна 2 2kM

Так как ширина полосы частот сигнала передаваемого сообщения равна И/!=1/Т„=Я то при обработке сигналов с программной перестройкой временного положения выигрыш

4.3. ПСЕВДОСЛУЧАЙНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И ИХ СВОЙСТВА
РАЗНОВИДНОСТИ ПСЕВДОСЛУЧАЙНЫХ И РОДСТВЕННЫХ ИМ ПОСЛЕДОВАТЕЛЬНОСТЕЙ
В общем случае к ПОП, используемым для расширения спектра сигналов, предъявляются следующие требования:
• большой объем ансамбля последовательностей, формируемых с помощью единого алгоритма;
• «хорошие» авто- и взаимно-корреляционные свойства последовательностей, входящих в состав ансамбля;
• сбалансированность структуры;
• максимальный период для заданной длины регистра сдвига, формирующего последовательность;
• непредсказуемость структуры последовательности по ее неискаженному сегменту ограниченной длины.
В соответствии с алгоритмами формирования различные ПСП можно классифицировать на линейные, нелинейные, комбинированные и каскадные.
Закон формирования линейных ПСП определяется линейным рекуррентным соотношением
![]()
где умножение и сложение производятся по mod 2, а коэффициенты с; принимают значения 0 или 1 и определяются характеристическим многочленом
![]()
Структурная схема генератора линейной ПСП в виде регистра сдвига с обратной связью через сумматоры по mod 2 изображена на рис.4.6.
Для формирования нелинейных ПСП имеются следующие возможности:
• использование внешней нелинейной логической функции для комбинирования элементов ПСП с периодом L=2-1, получаемой с помощью РСЛОС;
• использование регистров сдвига (РС) с нелинейной логической функцией в цепи обратной связи (внутренней логической функцией), позволяющей получать ПСП с периодом L=2 (последовательности де Бревна).
Структурные схемы генераторов с внешней и внутренней логическими-функциями изображены на рис.4.7, 4.8.
Комбинированные последовательности представляют собой результат объединения по определенному правилу двух или нескольких линейных ПСП. Среди комбинированных последовательностей прежде всего можно выделить ЛРД последовательности, формируемые в соответствии с одним из правил [4]:
где 9 — операция сложения по mod 2; — операция логического умножения; — линейные ПСП с возрастающими периодами; x> — меандр тактовой частоты.
ЛРД последовательности обладают специальными автокорреляционными свойствами и были разработаны для сокращения времени начальной синхронизации в системах измерения дальности до космических аппаратов, предназначенных для проведения научных исследований дальнего космического пространства.
Другими вариантами формирования комбинированных последовательностей является временное мультиплексирование и мажоритарное сложение линейных ПСП с различными периодами [5].
Особенность формирования каскадных ПСП состоит в использовании нескольких ступеней получения линейных ПСП таким образом, что выходная последовательность предыдущей ступени управляет тактированием последующей ступени [6].
Остановимся на наиболее важных разновидностях ПСП, входящих в приведенную классификацию.
ЛИНЕЙНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ МАКСИМАЛЬНОЙ ДЛИНЫ (т-ПОСЛЕДОВАТЕЛЬНОСТИ)
Последовательностями максимальной длины, (m-последовательностями) называются последовательности, формируемые регистрами сдвига с линейной обратной связью и имеющие период L=2' — 1, и — длина регистра. Наиболее важная особенность т-последовательностей состоит в том, что их периодическая автокорреляционная функция является оптимальной в классе возможных автокорреляционных функций двоичных последовательностей длиной L=2"-1. Оптимальность здесь понимается в смысле минимума максимального значения боковых выбросов автокорреляционной функции. Именно хорошие автокорреляционные свойства т-последовательностей и простота их формирования обусловили широкое их применение в системах связи [7].
Если L — простое число, то количество примитивных многочленов И,(п)=2(2" ' — 1)/и.
Например, при п=7 имеем L=127 и И (п)=2(64-1)/7=18. Из этих 18 многочленов половина являются зеркальными по отношению к другой половине. Зеркальный многочлен степени и по отношению к исходному определяется с помощью выражения
Таблица примитивных многочленов степеней n(40 содержится в [9] и позволяет получать т-последовательности с периодом 240 12 (4.28) Необходимым условием получения т-последовательности с помощью характеристического многочлена f(D) является его не- приводимость. Многочлен f(D) степени и называется неприводимым, если он не может быть разложен на многочлены-сомножители меньшей степени. Например, многочлен f(D)=D +D+1 является приводимым, так как D'+D+1=(D'+D'+1)(D +D+1). Если 2" — 1 является простым числом, то неприводимый многочлен порождает т-последовательность.
Неприводимый многочлен f(D) степени и называется примитивным, если период коэффициентов 1lf(D) равен 2" — 1. Примитивность многочлена f(D) является необходимым и достаточным условием получения т-последовательности. Примитивные многочлены существуют для всех п)1.
Например, при n=6 имеем L=63. Это число может быть представлено в виде произведения 3 3 7=3'7, причем р,=3; п,=2, р=7, п,=1. Поэтому количество примитивных многочленов Ир(п)= =(1/6)[(3 -1)(3 — 1)][(7 )(7 — 1)]=6. Если l может быть представлено в виде произведения некратных сомножителей, т.е. n;=1, то выражение (4.26) принимает вид
![]()
На рис.4.9 приведена структурная схема генератора т-последовательности, соответствующего характеристическому многочлену ((0) =D +D +1, которому соответствует рекуррентное соотношение а,=а; 3. Номера отводов регистра для цепи обратной связи соответствуют ненулевым коэффициентам многочлена. При начальных условиях а,=1, а,=а „=0 формируется последовательность а =(1011100,1011100,101...) с периодом 1 =7.
В табл.4.1 приведены некоторые данные, касающиеся количества и номеров отводов генераторов т-последовательностей, для различного числа разрядов регистра сдвига. Как следует из данных этой таблицы, с увеличением и количество т-последовательностей возрастает.
Перечислим некоторые из важнейших свойств т-последовательностей [4]:
Балансное свойство. Каждая гп-последовательность содержит 2 символов 1 и 2 символов О.
Свойство полноты состояний. Состояние разрядов регистра сдвига, формирующего m-последовательность, можно представить полным набором и-разрядных двоичных чисел за исключением числа, содержащего нули во всех разрядах. Состояние «все нули» является запрещенным.
Свойство серий. В периоде т-последовательности половина серий имеет длину 1, одна четверть — длину 2, одна восьмая— длину 3 и так до тех пор, пока это продолжение имеет смысл. Под серией здесь понимается набор следующих друг за другом одинаковых символов 0 или 1. Это свойство проиллюстрировано табл.4.2. Как следует из данных таблицы, исключение составляют серии, длина которых равна и (n — 1).
Свойство циклического сдвига при сложении. Сложение по mod 2 т-последовательности и некоторого ее циклического сдвига дает в результате другой циклический сдвиг той же самой последовательности. Это свойство иллюстрируется на рис.4.10.

Свойство децимации. Последовательность, образованная из взятых через один символов исходной т-последовательности, по структуре совпадает с исходной, но имеет в два раза ниже тактовую частоту. Это свойство иллюстрируется на рис.4.11. Здесь средняя последовательность представляет собой m-последовательность с тактовой частотой и периодом, равным 15. Верхняя последовательность образована из четных символов исходной
последовательности с увеличением их длительности вдвое. Нижняя последовательность образована из нечетных символов исходной m-последовательности с увеличением их длительности вдвое. Нетрудно убедиться, что эти последовательности являются циклическими сдвигами исходной т-последовательности, но с тактовой частотой f/2. Сдвиг между ними равен 7,5 тактовым интервалам или половине длины последовательности. Этот принцип может быть распространен для индексов децимации более высокого порядка. Например, при индексе децимации R (R является степенью 2) можно получить R подпоследовательностей с тактовой частотой. При четном индексе децимации R, но не равным степени 2, и если длина исходной т-последовательности есть простое число, то исходная т-последовательность может быть децимирована на R подпоследовательностей, являющихся ее зеркальными отображениями.
Корреляционные свойства. Если m-последовательность поэлементно сравнивать с любым ее циклическим сдвигом в течение периода, то количество совпадений отличается от количества не- совпадений не более, чем на единицу. Из этого следует, что авто- корреляционная функция т-последовательности, определяемая как


Как будет показано ниже, для систем СОМА представляют интерес не только авто-, но и взаимно-корреляционные свойства т-последовательностей. Взаимно-корреляционная функция двух последовательностей а и b одинаковой при произвольном сдвиге! определяется выражением

На рис.4.12 приведены авто- и взаимно-корреляционные функции последовательностей [5,3] и [5,4,3,2], а на рис.4.13 для сравнения — авто- и взаимно-корреляционные функции не т-последовательностей [5,4], [5,1]. Для ансамбля последовательностей
объемом M и периодом L получена нижняя граница для значений взаимно-корреляционной функции любой пары, входящей в ансамбль [4.10]:

На практике из двойной m-последовательности формируется биполярный модулирующий псевдослучайный сигнал
![]()
где U>(t) — функция, описывающая форму импульсного сигнала, имеющего длительность Т,.
Нормированная корреляционная функция биполярного псевдослучайного сигнала определяется следующим выражением:

где Ru(<) — корреляционная функция импульсного сигнала длительностью То, S — символ свертки двух функций.
Если U7()(t) представляет собой импульсный сигнал прямоугольной формы, то

Спектральные свойства. Спектральная плотность биполярного псевдослучайного сигнала , образованного из импульсов прямоугольной формы, определяемая как преобразование Фурье корреляционной функции г(т), имеет следующий вид:

Как следует из выражения (4.35), спектр биполярного псевдо- случайного сигнала содержит постоянную и дискретные спектральные составляющие, следующие через интервал Af=1!(LT,). Огибающая дискретных спектральных составляющих определяется функцией sine х, поэтому амплитуда спектральных составляющих равна нулю на частотах. Спектральная плотность биполярного сигнала изображена на рис.4.14. Путем увеличения периода m-последовательности можно уменьшить интервал между спектральными составляющими, сделав спектр практически сплошным. При этом спектральная плотность в пределах полосы частот, равной 2/Т, становится почти равномерной. Эти свойства спектральной плотности псевдослучайного сигнала позволяют его широко использовать в системах связи в качестве тестового и для получения аналогового шумового процесса с характеристиками, близкими к гауссовскому шуму [11].
Криптостойкость. Структура т-последовательности легко может быть раскрыта по ее неискаженному сегменту, содержащему 2n символов. Действительно, каждый символ сегмента удовлетворяет линейному рекуррентному соотношению (4.23), поэтому можно записать следующую систему линейных уравнений:
и относительно неизвестных коэффициентов. Эта система уравнений может быть решена с помощью так называемого алгоритма Берлекампа — Мэсси [12] и в результате решения найдены номера отводов регистра сдвига, участвующих в формировании сигнала обратной связи.
Проиллюстрируем возможность решения системы (4.36) на следующем примере. Предположим, что получена последовательность (01100100} и известно, что период последовательности равен 15. Таким образом, имеем систему из четырех уравнении.
Результаты анализа взаимно-корреляционных свойств m-последовательностей показали, что только небольшое количество из всего ансамбля т-последовательностей с заданным периодом обладает удовлетворительными корреляционными свойствами. Конечно, это не может удовлетворить потребности систем СОМА, когда речь идет об использовании порядка тридцати последовательностей и более [13].
Попытки найти ансамбли последовательностей с периодом L=2" — 1 большого объема, которые имели бы приемлемые максимальные значения взаимно-корреляционных функций, привели к появлению важного класса периодических псевдослучайных последовательностей, так называемых последовательностей.
Рассмотрим алгоритмы формирования д- последовательностей. Пусть имеется m-последовательность а с периодом L и последовательность полученная путем децимации последовательности а с индексом. Это означает, что для получения последовательности берется каждый символ последовательности. Любая пара m-последовательностей с периодом L может быть связана соотношением при некотором q. Две т-последовательности образуют предпочтительную пару, если выполняются следующие условия [4.15]:

Взаимно-корреляционная функция предпочтительной пары m-последовательностей имеет три значения: — t(n), -1, t(n) — 2, причем
Для построения ансамбля д- последовательностей необходимо знать предпочтительные пары т-последовательностей. Пусть а и есть предпочтительная пара т-последовательностей, тогда множество
последовательностей образуют ансамбль д- последовательностей. Любая пара д- последовательностей, входящих в ансамбль объемом L+1, как и предпочтительная пара, обладает трехуровневой взаимно-корреляционной функцией. За исключением последовательностей а и а' д- последовательности не являются последовательностями максимальной длины, поэтому их автокорреляционные функции являются не двухуровневыми, а трехуровневыми, такими же, как и взаимно-корреляционные функции. Максимальные значения боковых выбросов взаимно-корреляционных функций д- последовательностей для больших L при нечетном и в 42, а при четном и в 2 раза превышают границу, определяемую выражением (4.31).
Таблица характеристических многочленов, соответствующих предпочтительным парам т-последовательностей приведена в [2]. На рис.4.15 показана структура генератора последовательностей с периодом L=31, построенная в виде двух регистров сдвига с линейной обратной связью и позволяющая формировать ансамбль д- последовательностей объемом М=32.
ПОСЛЕДОВАТЕЛЬНОСТИ КАСАМИ, (k-ПОСЛЕДОВАТЕЛЬНОСТИ)
Последовательности Касами относятся к одному из важных классов двоичных псевдослучайных последовательностей с хорошими корреляционными свойствами [16]. Существуют два различных множества k-последовательностей: большое и малое. Для по- лучения k-последовательностей, принадлежащих малому множеству, используется алгоритм, аналогичный алгоритму формирования g- последовательностей
Малое множество состоит из двоичных последовательностей с периодом четное число. Алгоритм состоит в следующем. Сначала формируется т-последовательность а. Затем в результате ее децимации с индексом получается последовательность которая является т-последовательностью с периодом. Например, при n=10 период а равен 1023, а период равен 31. Поэтому на периоде последовательности а укладывается ЗЗ периода последовательности. Последовательности малого множества Касами получаются путем посимвольного сложения по mod 2 последовательностей а и всех циклических сдвигов последовательности. Включая исходную последовательность а, получаем 2" двоичные последовательности с периодом . Если т-последовательность а имеет характеристический многочлен f(D), а m-последовательность много- член f(D), то характеристический многочлен k-последовательности равен f(D)f'(О). Авто- и взаимно-корреляционные функции К-последовательностей относятся к классу трехуровневых и принимают значения. Следовательно, максимальные значения выбросов взаимно-корреляционных функций k-последовательностей удовлетворяют нижней границе (4.31) для ансамбля последовательностей объемом и периодом L=2" — 1. Поэтому малое множество k-последовательностей является оптимальным.
Большое множество k-последовательностей состоит из малого множества k-последовательностей и множества д- последовательностей с периодом четное число. Пусть являются m-последовательностями, полученными путем децимации т-последовательности а соответственно с индексом . Тогда последовательности, получаемые путем посимвольного сложения по mod 2 последовательностей и всех циклических сдвигов последовательностей образуют большое множество последовательностей. Объем ансамбля последовательностей большого множества равен. Авто- и взаимно-корреляционные функции k-последовательностей большого множества являются пятиуровневыми и могут принимать значения. Таким образом, максимальное значение модуля боковых выбросов взаимно-корреляционных функций k-последовательностей большого множества не превышает значения и не удовлетворяет нижней границе (4.31). Характеристический многочлен k-последовательности большого множества равен произведению характеристических многочленов m-последовательностей
ПОСЛЕДОВАТЕЛЬНОСТИ, ДВОЙСТВЕННЫЕ КОДАМ БОУЗА-ЧОУДХУРИ-ХОКВИНГЕМА (b-ПОСЛЕДОВАТЕЛЬНОСТИ)
Ансамбль последовательностей этого типа [17] совпадает с множеством кодовых слов корректирующего кода, двойственного коду БЧХ, исправляющему две ошибки. Характеристический многочлен последовательностей определяется выражением характеристические многочлены, порождающие т-последовательности и результат ее децимации по индексу 3. При нечетных и многочлен f(D) является примитивным, поэтому получаемый ансамбль последовательностей совпадает с ансамблем д-последовательностей. Если и — четное число, то авто- и взаимно-корреляционные функции b-последовательностей принимают значения.
Можно рассматривать последовательности, двойственные кодам БЧХ, исправляющим t ошибок. В результате могут быть по- строены ансамбли последовательностей объемом.
4.4. ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ СВЯЗИ, ИСПОЛЬЗУЮЩИХ МОДУЛЯЦИЮ С РАСШИРЕНИЕМ СПЕКТРА ОСНОВНЫЕ ВИДЫ ПОМЕХ
Системы связи, использующие модуляцию с расширением спектра, принято называть системами связи с расширенным спектром (ССРС). Рассмотрим некоторые из характерных видов помех, которые могут воздействовать на ССРС.
Наиболее распространенной является шумовая заградительная помеха, которая моделируется ограниченным по полосе гауссовским шумом с односторонней спектральной плотностью N>, как показано на рис.4.16,а. Здесь обычно предполагается, что спектр помехи полностью перекрывает спектр полезного сигнала. Действие такой помехи сводится к увеличению эквивалентной спек- тральной плотности шума.
Если для расширения спектра используется ППРЧ, то мощность помехи может быть использована более эффективно путем ее сосредоточения в ограниченной полосе, причем гораздо меньше той, которую занимает полезный сигнал. Такую помеху принято называть сосредоточенной по спектру или помехой с частичным перекрытием спектра согнала. Если среднюю мощность помехи обозначить через Р, а ширину спектра полезного сигнала — через WД, то односторонняя спектральная плотность шумовой загради- тельной помехи „ в пределах полосы а спектральная плотность сосредоточенной по спектру помехи в пределах полосы , как показано на оис.4.1В б
Сосредоточенная по спектру помеха оказывается особенно эффективной для ССРС с ППРЧ. При попадании частоты полезно- ro сигнала в полосу частот, «пораженную» помехой, резко возрастает вероятность ошибки при демодуляции элемента сообщения. Как будет показано ниже, существует оптимальное значение р, которое зависит от отношения мощностей сигнала и помехи, т.е.
Третьим видом помех является гармоническая помеха, которая представляет собой гармоническое колебание, мощность которого равна Р а частота лежит в пределах полосы частот, занимаемой полезным сигналом. Односторонняя спектральная плотность гармонической помехи показана на рис.4.16,в. Гармоническая помеха относится к числу эффективных помех для ССРС. К тому же такая помеха достаточно просто генерируется. Как показывает анализ, особенно эффективно ее воздействие на ССРС с прямым расширением спектра, причем в ситуации, когда ее частота совпадает с центральной частотой спектра полезного сигнала. Для систем с ППРЧ этот вид помехи менее эффективен, особенно при большом количестве рабочих частот, поскольку мгновенная ширина спектра сигнала с ППРЧ является достаточно небольшой, и вероятность совпадения частот полезного сигнала и помехи сохраняется низкой.
Для систем с ППРЧ более эффективна полигармоническая помеха, представляющая собой набор немодулированных колебаний, разнесенных по частоте. Односторонняя спектральная плотность полигармонической помехи показана на рис.4.16,г. Существует оптимальное количество частот (зависящее от отношения РIР,), для которого эффективность такой помехи максимальна.
Можно распределить имеющуюся мощность помехи не только по определенным участкам спектра, но в определенных интервалах времени. В этом случае имеет место так называемая прерывистая шумовая помеха. Этот вид помехи представляет собой временную последовательность реализаций широкополосного гауссовского шума, спектральная плотность которого перекрывает всю полосу, занимаемую ССРС, и характеризуется скважностью пере- дачи р. В «активные» интервалы времени прерывистая помеха имеет спектральную плотность. При скважности передачи р=0,5 значение спектральной плотности прерывистой помехи в два раза больше значения спектральной плотности непрерывной шумовой помехи. При рассмотрении прерывистой шумовой помехи обычно полагают, что выходной каскад усилителя мощности характеризуется ограничением на среднюю мощность, хотя в ряде случаев необходимо рассматривать ограничение на пиковую мощность.
Наконец, к последнему виду преднамеренных помех можно отнести ответную или ретранслированную помеху. Этот вид помехи, как следует из ее названия, предполагает в процессе ее получения прием полезного сигнала, внесение в него определенных искажений и переизлучение с достаточно большой мощностью. В демодуляторе этот искаженный сигнал будет отслеживаться и демодулироваться как полезный сигнал, поскольку его уровень значительно превышает уровень полезного сигнала. Заметим, что внесение искажений обязательно при формировании ответной по- мехи, так как в противном случае помехопостановщик выполняет функции дополнительного передатчика сигнала.
Существуют еще два вида помех, которые можно отнести к классу непреднамеренных и которые могут наблюдаться в системах связи, использующих сигналы с расширенным спектром. Это прежде всего помеха многолучевости. Эта помеха возникает, если между передатчиком и приемником имеется несколько путей распространения сигнала. Помеха представляет собой аддитивную смесь нескольких задержанных во времени и отличающихся по амплитуде вариантов полезного сигнала. Если минимальная задержка между полезным сигналом и любым его задержанным вариантом превышает длительность элемента псевдослучайной последовательности, то в процессе корреляционной обработки сигналы, образующие помеху многолучевости, сжиматься по спектру не будут и, следовательно, могут быть в значительной степени подавлены. Однако при этом могут возникнуть серьезные проблемы с временной синхронизацией, поскольку полезный сигнал и его задержанные варианты могут иметь примерно одинаковые уровни.
В системах связи, использующих технологию СОМА, имеют место взаимные помехи или помехи не ортогональности. Здесь все пользователи одновременно используют одну и ту же полосу частот, их сигналы различаются лишь по форме, и квазиортогональность сигналов, особенно при асинхронном режиме работы, вызывает появление взаимных помех. Рассмотрим помехоустойчивость ССРС при воздействии наиболее характерных видов помех. Помехоустойчивость будем оценивать вероятностью ошибки при приеме элемента сообщения, являющейся функцией отношения мощностей сигнала и помехи.
СИСТЕМЫ СВЯЗИ С ПРЯМЫМ РАСШИРЕНИЕМ СПЕКТРА
Прерывистая помеха. Предположим, что скважность прерывистой помехи p, и что в «активном» интервале времени формируются реализации широкополосного гауссовского шума с двусторонней спектральной плотностью двусторонняя спектральная плотность непрерывной помехи. Обозначим через среднюю мощность прерывистой помехи. Будем пола- гать, что частота повторения помехи небольшая, так что достаточное количество элементов дискретного сообщения передается в периоды времени между переходами помехи из активного состояния в пассивное. В этом случае оказывается справедливым квазистатический подход, основанный на анализе усредненного значения вероятности ошибки при демодуляции элемента дискретного сообщения. Имеем

где N0 — спектральная плотность теплового шума. Рассмотрим случай, когда на первой ступени модуляции используется двоичная фазовая манипуляция (2ФМ), а при демодуляции сигналов реализован когерентный алгоритм. При этом вероятность ошибки (4.38) вероятности ошибки при демодуляции элемента сообщения в случае воздействия на входе демодулятора помехи с односторонней спектральной плотностью N, и, соответственно; Р,— среднее значение вероятности ошибки при демодуляции элемента сообщения.
Односторонние спектральные плотности помехи на входе демодулятора будут определяться соответственно выражениями
![]()

Подставляя (4.38), (4.39) в (4.37), получаем

В том случае, когда спектральная плотность прерывистой помехи существенно превышает спектральную плотность теплового шума, получаем

Оптимальное значение p, максимизирующее значение вероятности , может быть найдено в результате решения уравнения Точное решение уравнения оптимизации приводит к следующим результатам [18]:

Таким образом в результате воздействия оптимизированной
прерывистой помехи экспоненциальная зависимость вероятности ошибки от отношения мощностей полезного сигнала и помехи трансформируется в обратно пропорциональную.
Сравним помехоустойчивость обычной узкополосной системы и системы с расширенным спектром. Здесь следует заметить, что анализ воздействия прерывистой помехи на узкополосную систему приводит к результатам, аналогичным (4.42), (4.43), в которых следует положить полосы частот, занимаемой узкополосной системой. Пусть в обеих системах скважность прерывистой помехи равна p. Тогда средняя мощность помехи, необходимая для подавления узкополосной системы передачи информации, будет. для подавления системы с расширенным спектром. Таким образом, выигрыш в помехоустойчивости составит.
Узкополосная помеха. При воздействии узкополосной помехи с частотой, совпадающей с частотой несущей, сигнал, поступающий на вход приемника, изображенного на рис.4.2 имеет следующий вид:
![]()
Если предположить наличие идеальной фазовой и временной синхронизации в когерентном демодуляторе 2ФМ сигналов, то сиг- нал на входе интегратора со сбросом будет иметь вид
![]()
Здесь начальная фаза полезного сигнала для простоты рассмотрения принята равной нулю.
Спектральная плотность гармонической помехи на входе интегратора со сбросом определяется выражением [19]

где черта сверху означает статистическое усреднение.
Так как фаза О является случайной величиной с равномерным распределением, то cos'0=1/2, и в окрестности нулевой частоты спектральная плотность преобразованной гармонической помехи

следует, что гармоническая помеха, имеющая мощность в результате корреляционной обработки преобразуется в широкополосную помеху, имеющую практически равномерную спектральную плотность в пределах полосы. Если предположить, что в результате интегрирования помеха преобразуется в гауссовскую случайную величину, полученную из аддитивного белого гауссовского шума с эквивалентной спектральной плотностью

Из (4.49) следует, что степень ослабления узкополосной помехи при корреляционной обработке сигналов с прямым расширением спектра определяется значением выигрыша при обработке.
Взаимные помехи. Рассмотрим синхронную систему СОМА, в которой в качестве сигналов-переносчиков сообщений используются сигналы с прямым расширением спектра, полученные путем двоичной фазовой манипуляции несущей ПСП с периодом , а для передачи элементов сообщения применяется двоичная фазовая манипуляция. В системе имеется К одновременно работающих каналов. Тогда канальные сигналы можно представить следующим образом:

Предположим, что канальный приемник «настроен» на сигнал первого канала з,(t). Тогда на входе приемника кроме теплового шума будут действовать другие (К — 1) канальных сигналов, создающих взаимные помехи. Рассмотрим предельный случай, когда мощность взаимных помех существенно превышает мощность теплового шума.
Предположим также, что фазы несущих. К представляют собой независимые одинаково и равномерно распределенные в интервале [0,2л] случайные величины, а фазу 0 будем считать равной нулю.
После корреляционной обработки и когерентной демодуляции сигнала s,(t) на входе решающего устройства демодулятора формируется сигнал Z(k), по знаку которого выносится решение о значении символа передаваемого сообщения:

Условная вероятность ошибки при демодуляции символа
можно показать, что условная вероятность ошибки ограничена сверху величиной

Граница Чернова представляет собой точную верхнюю границу и достаточно хорошо аппроксимирует выражение для вероятности ошибки, если 2(К) считать гауссовской случайной величиной с математическим ожиданием и дисперсией соответственно равными:

При гауссовской аппроксимации взаимных помех и равенстве априорных вероятностей передачи двоичных символов сообщения безусловная вероятность ошибки:

Предположим, что в качестве модулирующих ПСП выбраны последовательности из множества последовательностей с ограниченными значениями взаимно-корреляционных функций: Тогда вероятность ошибки будет ограничена сверху величиной
![]()
В случае гауссовской аппроксимации взаимных помех

При наличии аддитивного белого гауссовского шума граница Чернова (4.56) для вероятности ошибки принимает следующий вид:
При гауссовской аппроксимации взаимных помех
![]()
Пример. Рассмотрим синхронную систему СОМА, в которой для расширения спектра используются последовательности Касами (малое множество) с периодом . Выигрыш при корреляционной обработке при этом составляет 24дБ. Количество последовательностей 16, а максимальное значение взаимно-корреляционных функций. Предположим, что энергетический потенциал в каждом канале обеспечивает значение. Тогда при К=15 гарантируется, что Р=10
Рассмотренный пример проиллюстрировал достижимые характеристики системы СОМА при использовании для расширения спектра квазиортогональных модулирующих ПСП. Разумеется, что при использовании ортогональных ПСП количество одновременно
работающих каналов может быть увеличено до L, однако, количество возможных каналов также ограничено этой величиной. Применение квазиортогональных последовательностей позволяет существенно увеличить количество возможных каналов в системе, правда, за счет существенного ограничения одновременно работающих. Так, при использовании большого множества последовательностей Касами с периодом 1 количество возможных каналов возрастает до длина регистра сдвига, формирующего последовательность Касами).
В тех случаях, когда возможное количество каналов велико вместо гарантированной помехоустойчивости целесообразно рассматривать помехоустойчивость в среднем, отдавая себе отчет в том, что при некоторых комбинациях одновременно работающих каналов помехоустойчивость системы может оказаться ниже средней, а при некоторых комбинациях — выше. В этом случае вместо удобно ввести среднеквадратическое значение взаимно-корреляционных функций

Тогда усредненное значение вероятности ошибки в синхронной системе СОМА будет определяться следующим выражением:

Проблема динамического диапазона в системах СОМА. Выражение (4.60) было получено в предположении, что принимаемые сигналы, создающие взаимные помехи, имеют мощности, равные мощности полезного сигнала. В системах подвижной связи это допущение может оказаться справедливым лишь для прямой линии, т.е. линии от центральной станции до абонентских. Для обратной линии, т.е. от абонентской до базовой станции, оно, как правило, не выполняется, поскольку абонентские станции могут располагаться на различных расстояниях и условия распространения радиоволн для них могут оказаться разными [19]. Сильный сигнал, принимаемый базовой станцией от близкорасположенной абонентской станции, будет маскировать слабый сигнал, принимаемый от удаленной абонентской станции. Например, предположим, что мощность передаваемых сигналов абонентских станций потери при распространении радиоволн от удаленной абонентской станции составляют 95 дБ, а аналогичные потери для близкорасположенной абонентской станции составляют 35дБ. В этом случае мощность принимаемого на базовой станции сигнала близкорасположенной абонентской станции будет равна — 5дБмВт, а мощность сигнала удаленной абонентской станции будет равна — 65дБмВт. Таким образом, мощность помехи, создаваемой близкорасположенной абонентской станцией, будет на 60дБ превышать мощность сигнала, принимаемого от удаленной абонентской станции.
Этот эффект маскирования сигнала удаленной абонентской станции сигналом близко расположенной абонентской станции может быть частично ослаблен введением управления излучаемой мощностью, например, в соответствии с уровнем мощности сигнала, принимаемого со стороны базовой станции. Если учесть неравенство мощностей принимаемых сигналов, то (4.60) можно представить в следующем виде:

Помеха многолучевости. Помеха многолучевости возникает в каналах связи, где имеется несколько путей распространения радиоволн (лучей). Применение модуляции с расширением спектра позволяет не только ослабить влияние многолучевости, но в некоторых случаях эффективно ее использовать.
Так как модулирующие ПСП, используемые для расширения спектра сигналов, имеют малый уровень боковых выбросов авто- корреляционных функций, то помехи многолучевости, создаваемые сигналами, принимаемыми с задержками, превышающими длительность элемента ПСП, могут рассматриваться как дополнительные взаимные помехи. Если имеется К каналов с И различны- ми путями распространения радиоволн, то количество источников помехи увеличивается до (KN-1) и выражение для вероятности ошибки принимает следующий вид:

Здесь предполагается, что мощности сигналов всех источников помехи примерно равны. Обобщение на случай неравных мощностей можно получить в виде, аналогичном выражению (4.61).
С помощью корреляционной обработки принимаемых сигналов, реализованной в форме приемника Rake, можно эффективно использовать многолучевость для увеличения помехоустойчивости. В приемнике Rake энергия двух и более составляющих сигнала многолучевости когерентно комбинируется, обеспечивая таким образом увеличение мощности принимаемого сигнала и достижение эффекта разнесения. Приемник Rake состоит из набора корреляторов, согласованных с различными составляющими сигнала многолучевости, и позволяет накапливать их энергию для формирования статистики, с помощью которой выносится решение в пользу того или иного символа передаваемого сообщения.
Системы с программной перестройкой рабочей частоты.
Сосредоточенная по спектру помеха. Пусть аддитивная помеха, моделируемая гауссовским случайным процессом, имеющего среднюю мощность Р сосредоточена в полосе и имеет двустороннюю спектральную плотность. Рассмотрим случай медленной ППРЧ, полагая, что для передачи символов сообщения используется частотная манипуляция, а при демодуляции реализован оптимальный некогерентный алгоритм. В этом случае среднее значение вероятности ошибки при демодуляции символа дискретного сообщения равно

Если спектральная плотность N~I(2 сосредоточенной по спектру помехи существенно превышает плотность И,I2 теплового шума, выражение (4.63) принимает следующий вид:

Оптимальное значение р, для которого вероятность ошибки (4.64) максимальна, находится решением уравнения
Отметим, что сосредоточенная по спектру помеха воздействует на систему с ППРЧ точно так же, как прерывистая помеха на систему с прямым расширением спектра. Отличие состоит лишь в том, что коэффициент помехозащищенности (при одинаковых значениях выигрыша при обработке и средней вероятности ошибки) для системы с ППРЧ оказывается на 6,5 дБ ниже. Однако следует иметь в виду то, что при использовании ППРЧ как метода расширения спектра полосу частот удается увеличить на несколько порядков по сравнению с прямым расширением спектра.
Ответная помеха, помеха многолучевости. Для борьбы с ответной помехой и помехой многолучевости оказывается эффективным применение быстрой ППРЧ, когда для передачи сообщения используется частот. Действительно, если длительность Т, частотного элемента (время пребывания на фиксированной частоте) выбрать меньше или равным разности времен запаздывания сигналов при прохождении по прямому пути и пути с переприемом или переотражением, то синтезатор частот приемника перестроится на другую частоту приема раньше, чем на вход приемника поступит сигнал помехи на соответствующей частоте. Таким образом, если скорость перестройки частоты выбрать, исходя из условия
![]()
(4.70) то влияние ответной помехи или помехи многолучевости может быть заметно ослаблено. Здесь — минимальное время запаздывания сигнала на пути с переприемом (переотражением); т время запаздывания сигнала при прохождении по прямому пути.
Однако система с быстрой ППРЧ при действии теплового шума или сосредоточенной по спектру помехи оказывается менее помехоустойчивой, поскольку при обработке сигналов с быстрой ППРЧ приходится осуществлять некогерентное накопление NД элементов сигнала в течение интервала передачи элемента сообщения [8].
Взаимные помехи. Программная перестройка рабочей частоты может быть использована при построении систем СОМА. В этом случае каждый канал отличается программой (законом) перестройки рабочей частоты, причем законы перестройки выбираются исходя из требуемой вероятности совпадения частотных элементов. Оценим помехоустойчивость синхронной системы СОМА с ППРЧ, полагая, что в ней имеется К «активных» каналов. Будем считать, что количество рабочих частот равно М, а вероятность совпадения полезного и мешающего сигналов равна 1/М. При совпадении час- тот полезного и мешающего сигналов вероятность ошибки равна 0,5. Конечно, это пессимистическое предположение, на самом деле значение вероятности ошибки оказывается меньше. Поскольку в системах с ППРЧ чаще всего реализуется некогерентный алгоритм демодуляции, то вероятность ошибки при демодуляции сим- вола сообщения будет определяться следующим выражением:

где Р- вероятность совпадения рабочих частот полезного и мешающего сигналов.

При наличии (К — 1) источников помехи
Подставляя (4.70) в (4.69), получаем

При значении отношения Е',/И,, стремящемся к бесконечности, получаем следующее выражение для вероятности ошибки:

Эта величина характеризует так называемое явление «неустранимых» ошибок, обусловленных наличием взаимных помех. Для достижения малых значений вероятности «неустранимых» ошибок необходимо увеличить количество имеющихся частотных каналов и уменьшить количество «активных» каналов.
В случае асинхронной системы СОМА с ППРЧ вероятность совпадения частот полезного и мешающего сигналов определяется выражением [21]

где N — количество битов, передаваемых на одной рабочей частоте. Сопоставляя (4.70) и (4.73), можно установить, что в асинхронной системе вероятность совпадения частот полезного и мешающего сигналов выше, чем в синхронной. Подставляя (4.73) в (4.69), получаем следующее выражение для вероятности ошибки при демодуляции элемента сообщения в асинхронной системе с СОМА с ППРЧ:

В заключение отметим, что в системах СОМА с ППРЧ в меньшей степени проявляется проблема динамического диапазона принимаемых сигналов. Это связано с тем, что в различных «активных» каналах крайне редко одновременно используются одни и те же рабочие частоты. Она возникает лишь в случае недостаточной частотной избирательности фильтров.
ОСНОВЫ ТЕОРИИ МНОГОКАНАЛЬНОЙ ПЕРЕДАЧИ СООБЩЕНИЙ
5.1. СИСТЕМА МНОГОКАНАЛЬНОЙ СВЯЗИ
Высокая стоимость линий связи обуславливает разработку систем и методов, позволяющих одновременно передавать по одной линии связи большое число независимых сообщений, т.е. использовать линию многократно. Такие системы связи называют многоканальными. Связь, осуществляемую с помощью этих систем, принято называть многоканальной. Практически все современные системы связи за редким исключением являются многоканальными [3,5,6].
В современных сетях связи используются аналоговые и цифровые системы передачи (СП) с тенденцией постепенного перехода к применению только цифровых систем. Однако предстоит дли- тельный период сосуществования на сетях связи аналоговых и цифровых систем, когда большое число соединений будет устанавливаться с использованием обеих технологий. Для обеспечения в этих условиях заданных характеристик каналов и трактов, гарантирующих высокое качество передачи информации, принципы проектирования цифровых и аналоговых систем передачи должны быть совместимы.
Используемые методы разделения каналов (PK) можно классифицировать как линейные и нелинейные (комбинационные). В большинстве случаев разделения каналов каждому источнику сообщения выделяется специальный сигнал, называемый канальным. Модулированные сообщениями канальные сигналы объединяются, в результате чего образуется групповой сигнал. Если операция объединения линейна, то получившийся сигнал называют линейным групповым сигналом.
Для унификации многоканальных систем связи за основной или стандартный канал принимают канал тональной частоты (канал ТЧ), обеспечивающий передачу сообщений с эффективно передаваемой полосой частот 300...3400 Гц, соответствующей основному спектру телефонного сигнала.
Многоканальные системы образуются в результате объединения каналов ТЧ в группы, обычно кратные 12 каналам. В свою очередь, часто используют «вторичное уплотнение» каналов ТЧ телеграфными каналами и каналами передачи данных.
На рис.5.1 приведена структурная схема наиболее распространенных систем многоканальной связи. Реализации сообщений каждого источника а,(t),a>(t),...,а(Ц с помощью индивидуальных передатчиков (модуляторов) М,,М...,MД преобразуются в соответствующие канальные сигналы s,(t),s,(t),..., s(t). Совокупность канальных сигналов на выходе суммирующего устройства образует групповой сигнал s(t). Наконец, в групповом передатчике М сигнал з(Ц преобразуется в линейный сигнал s„(t), который и поступает в линию связи ЛС. Допустим, что линия пропускает сигнал практически без искажений и не вносит шумов. Тогда на приемном конце линии связи линейный сигнал з„(Ц с помощью группового приемника П может быть вновь преобразован в групповой сигнал s(t). Канальными или индивидуальными приемниками из группового сигнала s(t) выделяются соответствующие канальные сигналы и затем преобразуются в предназначенные получателям сообщения а<(t),а,(1), а(Ц.
Канальные передатчики вместе с суммирующим устройством образуют аппаратуру объединения. Групповой передатчик М, линия связи ЛС и групповой приемник П составляют групповой канал связи (тракт передачи), который вместе с аппаратурой объединения и индивидуальными приемниками составляет систему много- канальной связи.
Индивидуальные приемники системы многоканальной связи П, наряду с выполнением обычной операции преобразования сигналов з,(Е) в соответствующие сообщения а,(Е) должны обеспечить выделение сигналов з,(1) из группового сигнала s(t). Иначе говоря, в составе технических устройств на передающей стороне многоканальной системы должна быть предусмотрена аппаратура объединения, а на приемной стороне — аппаратура разделения.
В общем случае групповой сигнал может формироваться не только простейшим суммированием канальных сигналов, но также и определенной логической обработкой, в результате которой каждый элемент группового сигнала несет информацию о сообщениях источников. Это так называемые системы с комбинационным разделением.
Чтобы разделяющие устройства были в состоянии различать сигналы отдельных каналов, должны существовать определенные признаки, присущие только данному сигналу. Такими признаками в общем случае могут быть параметры переносчика, например амплитуда, частота или фаза в случае непрерывной модуляции гармонического переносчика. При дискретных видах модуляции различающим признаком может служить и форма сигналов. Соответственно различаются и способы разделения сигналов: частотный, временной,, фазовый и др.
5.2. ЧАСТОТНОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Функциональная схема простейшей системы многоканальной связи с разделением каналов по частоте представлена на рис.5.2. В зарубежных источниках для обозначения принципа частотного разделения каналов (ЧРК) используются термины Frequency Division Multiplexing (FDM) и Frequency Division Multiply Access (FDMA).
Сначала в соответствии с передаваемыми сообщениями первичные (индивидуальные) сигналы, имеющие энергетические спектры G(ro), G(а), ..., Ян(о) модулируют несущие частоты а„каждого канала. Эту операцию выполняют модуляторы М1,М,,...,М канальных передатчиков. Полученные на выходе частотных фильтров спектры д„(в) канальных сигналов занимают соответственно полосы частот которые в общем случае мокнут отличаться по ширине от спектров сообщений. При широкополосных видах модуляции, например ЧМ, ширина спектра Ла=2(~+1)о„, т.е. в общем случае. Для упрощения будем считать, что используется амплитудная модуляция с одной боковой полосой (АМ-ОБП) (как это принято в аналоговых СП с ЧРК), т.е.
Лв,=Q и A(o=NQ).
Проследим основные этапы образования сигналов, а также изменение этих сигналов в процессе передачи (рис.5.3). Будем полагать, что спектры индивидуальных сигналов конечны. Тогда можно подобрать поднесущие частоты так, что полосы попарно не перекрываются. При этом условии сигналы s<(t) (k=1, ..., N) взаимноортогональны. Затем спектры д(о),д,(в), ..., д(о) суммируются и их совокупность д(о) поступает на групповой модулятор (М). Здесь спектр д(о) с помощью колебания несущей частоты переносится в область частот, отведенную для передачи данной группы каналов, т.е. групповой сигнал s(t) преобразуется в линейный сигнал s,(t). При этом может использоваться любой вид модуляции.
На приемном конце линейный сигнал поступает на групповой демодулятор (приемник П), который преобразует спектр линейного сигнала в спектр группового сигнала д'(о). Спектр группового сигнала затем с помощью частотных фильтров вновь разделяется на отдельные полосы, соответствующие отдельным каналам. Наконец, канальные демодуляторы Д преобразуют спектры сигналов в спектры сообщений б(а), предназначенные получателям.
Из приведенных пояснений легко понять смысл частотного способа разделения каналов. Поскольку всякая реальная линия связи обладает ограниченной полосой пропускания, то при многоканальной передаче каждому отдельному каналу отводится определенная часть общей полосы пропускания. На приемной стороне одновременно действуют сигналы всех каналов, различающиеся положением их частотных спектров на шкале частот. Чтобы без взаимных помех разделить такие сигналы, приемные устройства должны содержать частотные фильтры. Каждый из фильтров Ф„ должен пропустить без ослабления лишь те частоты вело которые принадлежат сигналу данного канала; частоты сигналов всех других каналов фильтр должен подавить. На практике это невыполнимо. Результатом являются взаимные помехи между каналами. Они возникают как за счет неполного сосредоточения энергии сигнала k-го канала в пределах заданной полосы частот, так и за счет неидеальности реальных полосовых фильтров. В реальных условиях приходится учитывать также взаимные помехи нелинейного происхождения, например из-за нелинейности характеристик группового канала.
Для снижения переходных помех до допустимого уровня приходится вводить защитные частотные интервалы (рис.5.4).
Так, в современных системах многоканальной телефонной связи каждому телефонному каналу выделяется полоса частот 4 кГц, хотя частотный спектр передаваемых звуковых сигналов ограничивается полосой от 300 до 3400 Гц, т.е. ширина спектра составляет 3,1 кГц. Между полосами частот соседних каналов предусмотрены интервалы шириной по 0,9 кГц, предназначенные для снижения уровня взаимных помех при расфильтровке сигналов. Это означает, что в многоканальных системах связи с частотным разделением сигналов эффективно используется лишь около 80% полосы пропускания линии связи. Кроме того, необходимо обеспечить высокую степень линейности всего тракта группового сигнала.
5.3. ВРЕМЕННОЕ РАЗДЕЛЕНИЕ КАНАЛОВ
Принцип временного разделения каналов (ВРК) состоит в том, что групповой тракт предоставляется поочередно для передачи сигналов каждого канала многоканальной системы (рис.5.5). В зарубежных источниках для обозначения принципа временного разделения каналов применяются термины Типе Division Multiplexing (TDM) и Time Division Multiply Access (TDMA).
При передаче используется дискретизация во времени (импульсная модуляция). Сначала передается импульс 1-го канала, затем следующего канала и так до последнего канала с номером И, после чего опять передается импульс 1-го канала и процесс повторяется периодически. На приеме устанавливается аналогичный коммутатор, который поочередно подключает групповой тракт к соответствующим приемникам. В определенный короткий промежуток времени к групповой линии связи оказывается подключена только одна пара приемник/передатчик. Это означает, что для нормальной работы многоканальной системы с ВРК необходима синхронная и синфазная работа коммутаторов на приемной и передающей сторонах. Для этого один из каналов занимают под передачу специальных импульсов синхронизации.
На рис.5.6 представлены временные диаграммы, поясняющие принцип ВРК. На рис.5.6,а — в приведены графики трех непрерывных аналоговых сигналов и соответствующих им сигналов амплитудно-импульсной модуляции (АИМ сигналов).
Импульсы разных АИМ сигналов сдвинуты друг относительно друга по времени. При объединении индивидуальных каналов в канале (линии) связи образуется групповой сигнал с частотой следования импульсов, в N раз большей частоты следования индивидуальных импульсов.
Интервал времени Т между ближайшими импульсами группового сигнала и„называется канальным интервалом или тайм- слотом (time slot). Промежуток времени между соседними импульсами одного индивидуального сигнала называется циклом передачи. От соотношения Т, и Т„зависит число импульсов, которое можно разместить в цикле, т.е. число временных каналов.
При временном разделении, так же как и при ЧРК, существуют взаимные помехи, в основном обусловленные двумя причинами. Во-первых, линейные искажения, возникающие из-за ограниченности полосы частот и неидеальности амплитудно-частотной и фазочастотной характеристик любой физически осуществимой системы связи, нарушают импульсный характер сигналов. При временном разделении сигналов это приведет к тому, что импульсы одного канала будут накладываться на импульсы других каналов. Иначе говоря, между каналами возникают взаимные переходные помехи или межсимвольная интерференция. Во-вторых, взаимные помехи могут возникать за счет несовершенства синхронизации тактовых импульсов на передающей и приемной сторонах. В силу данных причин временное разделение каналов на основе АИМ не получило практического применения. Временное разделение широко используют в цифровых системах передачи плезиохронной и синхронной иерархий, которые будут подробно рассмотрены ниже.
В общем случае для снижения уровня взаимных помех приходится вводить «защитные» временные интервалы, что соответствует некоторому расширению спектра сигналов. Так, в системах передачи полоса эффективно передаваемых частот F=3100 Гц; в соответствии с теоремой Котельникова (см. ~8.1) минимальное значение частоты дискретизации (,=1/7„=2Е=6200Гц. Однако в реальных системах частоту дискретизации выбирают с некоторым запасом: (,=8 кГц. При временном разделении каналов сигнал каждого канала занимает одинаковую полосу частот, определяемую в идеальных условиях согласно теореме Котельникова из соотношения (без учета канала синхронизации)
![]()
где что совпадает с общей полосой частот системы при частотном разделении. Хотя теоретически временное и частотное разделения позволяют получить одинаковую эффективность использования частотного спектра, тем не менее, пока системы временного разделения уступают системам частотного разделения по этому показателю.
Вместе с тем системы с временным разделением имеют неоспоримое преимущество, связанное с тем, что благодаря разновременности передачи сигналов разных каналов отсутствуют переходные помехи нелинейного происхождения. Кроме того, аппаратура временного разделения значительно проще аппаратуры частотного разделения, где для каждого индивидуального канала требуются соответствующие полосовые фильтры, которые достаточно трудно реализовать средствами микроэлектроники.
5.4. РАЗДЕЛЕНИЕ СИГНАЛОВ ПО ФОРМЕ
Для разделения сигналов могут использоваться не только такие очевидные признаки, как частота, время и фаза. Наиболее общим признаком является форма сигналов. Различающиеся по форме сигналы могут передаваться одновременно и иметь перекрывающиеся частотные спектры и тем не менее такие сигналы можно разделить, если выполняется условие их ортогональности. Пусть в качестве переносчиков выбраны импульсы, последовательность которых образует, например, степенной ряд.
В предположении, что информация содержится в коэффициентах для группового сигнала запишем
![]()
Члены ряда линейно независимы и, следовательно, ни один из канальных сигналов не может быть образован линейной суммой всех других сигналов. Это легко понять, обратив внимание на то, что многочлен от t может быть тождественно равен нулю только в том случае, когда все его коэффициенты равны нулю.
В последние годы успешно развиваются цифровые методы разделения сигналов по их форме. В частности, в качестве пере- носчиков различных канальных сигналов используются дискретные ортогональные последовательности в виде функций Уолша, Радемахера и др. Широкое развитие методов разделения сигналов по форме привело к созданию систем связи с разделением «почти ортогональных» сигналов, представляющих собой псевдослучайные последовательности, корреляционные функции и энергетические спектры которых близки к аналогичным характеристикам «ограниченного» белого шума. Такие сигналы называют шумоподобными (ШПС). Основной характеристикой ШПС является база сигнала В, определяемая как произведение ширины его спектра F на его длительность Т.
База ШПС характеризует расширение его спектра по сравнению со спектром исходного сигнала. Расширение спектра частот может осуществляться умножением исходного сигнала (например, двухчастотной ЧМ) на псевдослучайную последовательность (ПСП) с периодом повторения Т (равным длительности интервала модуляции исходного ЧМ сигнала), включающую И бит ПСП длительностью т, каждый. В этом случае база ШПС численно равна количеству элементов ПСП: В=Т/т,=И.
Поскольку параметры ШПС (два набора значений битов ПСП при двухчастотной ЧМ) известны, то прием ШПС может производиться приемниками, рассчитанными на прием сигналов с известными параметрами. В результате отношение сигнал/шум на выходе приемника улучшается в В раз по отношению к входу.
В зарубежных источниках для обозначения данного принципа применяется понятие кодового разделения каналов — Code Division Multiply Access (CDMA).
5.5. ОБЕСПЕЧЕНИЕ ДАЛЬНОСТИ СВЯЗИ
Многоканальные системы передачи с частотным и временным разделением каналов — это сложный комплекс технических средств, включающий в себя оконечную аппаратуру, устанавливаемую на оконечных пунктах (ОП), промежуточную аппаратуру, размещаемую в обслуживаемых (ОУП) или необслуживаемых (НУП) усилительных пунктах, а также линий связи (рис.5.7). В отличие от аналоговых систем в цифровых системах на обслуживаемых и не- обслуживаемых пунктах устанавливается аппаратура для восстановления (регенерации) импульсных сигналов линейного тракта. Отсюда обслуживаемые и необслуживаемые пункты в этих системах принято называть регенерационными (ОРП, НРП).
Поясним, для чего нужны усилительные и регенерационные пункты. Дальность передачи сигналов по физическим цепям (средам) определяется прежде всего затуханием (ослаблением) сигнала из-за того, что в цепи теряется часть энергии передаваемого сигнала. Конкретные электрические параметры цепи и чувствительность приемного устройства определяют допустимую дальность связи. Например, при передаче речи мощность сигнала на выходе микрофона телефонного аппарата Р„„=1мВт, а чувствительность телефона приемного аппарата Р„,=0,001 мВт. Таким образом, максимально допустимое затухание цепи не должно быть больше а,„=101g(Р„„/Рр)=10lg(1/0,001)=30 дБ. Зная затухание километрический коэффициент затухания d, можно определить дальность передачи /=а ,„/с(.

В системах передачи применяется способ компенсации затухания сигналов повышением мощности сигнала в нескольких равномерно расположенных точках тракта. Часть канала связи между соседними промежуточными усилителями называется усилительным участком. Изменение уровней сигнала вдоль магистрали описывается диаграммой уровней, приведенной на рис.5.8.
Аппаратура ОУП и НУП служит не только для усиления аналогового сигнала, но и для коррекции (выравнивания) амплитудночастотных и фазочастотных характеристик линейного тракта. Аппаратура НРП и ОРП предназначена для восстановления амплитуды, длительности и временного интервала между импульсами сигнала цифровых систем.
Расстояние между НУП (НРП) меняется в широких пределах для различных систем передачи и может составлять от единиц до десятков (иногда сотен) километров. Как правило, НУП (НРП) представляет собой металлическую камеру, имеющую подземную и наземную части. В камере размещаются вводно-коммутационное и усилительное (регенерационное) оборудование. Аппаратура ОП и ОУП (ОРП) размещается в зданиях, где постоянно находится технический персонал для ее обслуживания.
ЛИНИИ СВЯЗИ
6.1. КАБЕЛЬНЫЕ И ВОЗДУШНЫЕ ЛИНИИ СВЯЗИ НА ОСНОВЕ МЕТАЛЛИЧЕСКИХ ПРОВОДНИКОВ
Существующие линии связи (ЛС) [7,8,9] в зависимости от используемой среды распространения сигналов принято делить на проводные и радиолинии.
К линиям связи предъявляются следующие основные требования:
• осуществление связи на практически требуемые расстояния;
• широкополосность и пригодность для передачи различных видов сообщений;
• защищенность цепей от взаимных влияний и внешних помех, а также от физических воздействий (атмосферных явлений, коррозии и пр.);
• стабильность параметров линии, устойчивость и надежность связи;
• экономичность системы связи в целом.
Часто возникает путаница в применениях терминов «провод», «кабель» и «линия связи». Провод — конструктивный элемент, представляющий собой проводник (проводники) той или иной конструкции в изолирующем покрытии. Кабель — законченная конструкция, состоящая из одного или нескольких проводов, заключенных в общие экранирующие, защитные и прочие покровы. Линия связи — инженерное сооружение, состоящее из проложенного по определенной гeoграфической трассе кабеля связи, при необходимости снабженная устройствами защиты от внешних влияний (грозоразрядники и т.п.), а также усилительными и регенерационными пунктами.
Рассмотрим проводные ЛС. В простейшем случае проводная ЛС — физическая цепь, образуемая парой металлических проводников. По конструкции и взаимному расположению проводников различают симметричные и коаксиальные провода и кабели связи (рис.6.1).
Симметричный провод состоит из двух совершенно одинаковых в электрическом и конструктивном отношениях изолированных проводников. В зарубежных источниках его часто называют «витая пара» (Twisted Pair — ТР). Различают экранированные (shielded) и неэкранированные (unshielded) симметричные провода.
Коаксиальный провод (от англ. со-axial — соосный) представляет собой два цилиндра с совмещенной осью, причем один цилиндр — сплошной внутренний проводник концентрически расположен внутри другого полого цилиндра (внешнего проводника). Проводники изолированы друг от друга диэлектрическим материалом.
Рассмотрим основные параметры симметричных и коаксиальных кабелей (СК и КК).
Коэффициент затухания (а, дБ/км) зависит от свойств материалов проводников и изоляционного материала. Наилучшими свойствами (малым сопротивлением) обладают медь и серебро. Коэффициент затухания зависит также от геометрических размеров проводников. СК с большими диаметрами проводников имеют меньший коэффициент затухания. Коэффициент затухания КК зависит от соотношения диаметров внешнего и внутреннего проводника (рис.6.2). Оптимальными соотношениями являются (материал внешнего проводника): 3,6 для меди, 3,9 для алюминия, 5,2 для свинца.
Очень важной характеристикой, фактически определяющей широкополосность системы связи, является зависимость коэффициента затухания от частоты (рис.6.3). Если определен гpaничный коэффициент затухания (обычно он определяется возможностями усилителей или регенераторов (см. 5.4)), то данному коэффициенту соответствует граничная частота пропускания системы. Полоса пропускания системы не превышает граничной частоты пропускания.
Частотная зависимость скорости распространения (v, км/мс). показана на рис.6.4. С ростом частоты скорость распространения увеличивается, приближаясь к скорости света в вакууме v,=300 км/мс. Данный параметр зависит также от свойств диэлектрика, применяемого в кабеле.
Волновое conpomивленue (Е„Ом) — сопротивление, которое встречает электромагнитная волна при распространении вдоль однородной линии без отражения, т.е. при условии, что на процесс передачи не влияют несогласованности на концах линии. Волновое сопротивление СК зависит от удельных значений емкости и индуктивности кабеля. Для КК волновое сопротивление определяется как Z = — Zln —, где Z — волновое сопротивление диэлектрика, D и d-соответственно диаметры внешнего и внутреннего проводников.
Основные требования к СК определены в рекомендации ITU-Т G.613. Диаметр жилы СК обычно составляет 0,4...1,2 мм. Как правило, СК обычно используются в диапазоне частот до 10 МГц. Ос- новные параметры КК приведены в табл.6.1.
В настоящее время выпускается широкая номенклатура кабелей, различающихся назначением, областью применения, условиями прокладки и эксплуатации и пр.
На рис.6.5 приведен пример конструкции кабеля для магистральной сети КМБ-8/7. В конструкции кабеля предусмотрено несколько коаксиальных цепей разного типа, несколько симметричных пар, а также отдельные изолированные жилы. Последние обычно используются для технологических целей.
Воздушные ЛС (ВЛС) не имеют изолирующего покрытия между проводниками, роль изолятора играет слой воздуха. Проводники выполняются, в основном, из биметаллической сталемедной (сталеалюминевой) проволоки. Внутренний диаметр стальной проволоки обычно составляет 1,2...4 мм, толщина внешнего слоя меди (алюминия) 0,04...0,2 мм. Проволока подвешивается на деревянных или железобетонных опорах с помощью фарфоровых изоляторов. Используемый частотный диапазон ВЛС не превышает 150 кГц.
6.2. ПРОБЛЕМА ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ
Цепи ЛС постоянно находятся под воздействием сторонних электромагнитных полей различного происхождения. Выделяют две основные группы источников сторонних полей:
• внутренние — соседние физические и искусственные цепи данной линии связи;
• внешние — энергетически и конструктивно не связанные с линией связи.
Внешние источники помех, в свою очередь, по своему происхождению делятся на:
• естественные — грозовые разряды, солнечная радиация и пр.;
• созданные человеком — высоковольтные линии передачи, радиостанции, линии электрифицированных железных дорог, электрические сети промышленных предприятий и отдельные энергоемкие устройства.
Сторонние электромагнитные поля индуцируют в цепях линий связи помехи, которые не только снижают качество передачи, но иногда возбуждают большие напряжения и токи, приводящие к разрушению линий связи и аппаратуры. Указанные воздействия называют электромагнитными влияниями или просто на цепи линий связи. Данная проблема является общей для всех систем и устройств телекоммуникаций и называется проблемой электромагнитной совместимости. Сущность ее состоит в том, что в процессе проектирования, строительства и эксплуатации телекоммуникационных устройств и систем необходимо учитывать два противоречивых требования:
• обеспечить достаточную для нормальной работы телекоммуникационных систем защиту от воздействия на них сторонних электромагнитных полей;
• ограничить допустимыми значениями уровни влияния электро- магнитных полей проектируемых устройств и систем на другие устройства.
При количественной оценке уровня взаимных влияний обычно рассматривают две цепи: влияющую (создающую электромагнитное поле) и подверженную влиянию (в которой индуцируются помехи) (рис.6.6). Ближним концом линии называют тот, к которому подключен генератор, дальним концом — тот, к которому подключена нагрузка цепи. Соответственно рассматриваются мощности сигналов в цепях: — на ближнем конце влияющей цепи; — на дальнем конце влияющей цепи; — на ближнем конце цепи, подверженной влиянию; на дальнем конце цепи, подверженной влиянию.
Количественно защищенность от переходных помех из-за взаимных электромагнитных влияний оценивается рядом показателей, в том числе переходным затуханием на ближнем конце линии (Near End Cross Talk — NEXT) Ао=10lgIlР,~IР~~j, переходным затуханием на дальнем конце линии (Far End Cross Talk — FEXT).
6.3. ВОЛОКОННО-ОПТИЧЕСКИЕ ЛИНИИ СВЯЗИ
Волоконно-оптические линии связи (ВОЛС) [3,6,11] имеют ряд существенных преимуществ по сравнению с линиями связи на основе металлических кабелей. К ним относятся: большая пропускная способность, малое затухание, малые масса и габариты, высокая помехозащищенность, надежная техника безопасности, практически отсутствующие взаимные влияния, долговечность, малая стоимость из-за отсутствия в конструкции цветных металлов.
Конечно, ВОЛС обладают рядом недостатков:
• при создании линии связи требуются высоконадежные активные элементы, преобразующие электрические сигналы в оптическое излучение и обратно, а также оптические соединители (коннекторы) с малым затуханием и большим ресурсом на подключение- отключение; точность изготовления таких элементов линии связи должна быть очень высока, поэтому их производство дорогостоящее;
• для монтажа оптических волокон требуется прецизионное, а потому дорогое технологическое оборудование;
• при обрыве оптического кабеля затраты на восстановление выше, чем при использовании кабелей с металлическими проводниками.
Преимущества ВОЛС настолько значительны, что, несмотря на перечисленные недостатки, эти линии связи очень широко используются на практике.
В ВОЛС применяют электромагнитные волны оптического диапазона. Напомним, что видимое оптическое излучение лежит в диапазоне длин волн 380...760 нм. Практическое применение в ВОЛС получил инфракрасный диапазон, т.е. излучение с длиной волны более 760 нм.
Оптическое волокно (ОВ) изготавливается из недорогого материала — кварцевого стекла в виде цилиндров с совмещенными осями и различными коэффициентами преломления. Внутренний цилиндр называется сердцевиной (Core), а внешний слой — оболочкой (Cladding). Принцип распространения оптического излучения вдоль оптического волокна основан на отражении от границы сред с разными показателями преломления (рис.6.7).

Угол полного внутреннего отражения, называемый также критическим, при котором падающее на границу двух сред излучение полностью отражается без проникновения во внешнюю среду, определяется соотношением— показатель преломления сердцевины; и, — показатель преломления оболочки, причем п,>и,. Излучение должно вводится в волокно под углом к оси, меньшим.
В зависимости от вида профиля показателя преломления сердцевины различают ступенчатые и градиентные ОВ. У ступенчатых ОВ показатель преломления сердцевины постоянен (рис.6.8,а). У градиентных ОВ показатель преломления сердце- вины плавно меняется вдоль радиуса от максимального значения на оси до значения показателя преломления оболочки (рис.6.8, б).
В ОВ может одновременно существовать несколько типов волн (мод). В зависимости от модовых характеристик ОВ со ступенчатым профилем преломления делятся на два вида: многомодовые и одномодовые.
Количество мод зависит от значения нормированной частоты v = (п,-и,, где 0 — диаметр сердцевины ОВ; Х — рабочая длина волны. Одномодовый режим реализуется при V<2,405. Заранее определенными и сравнительно малыми величинами являются рабочая длина волны и разность показателей преломления Ь„=и,— и,. Обычно ОВ изготавливают с 5,=0,003...0,05. Поэтому диаметр сердцевины одномодовых волокон также небольшой и составляет 5...15 мкм (обычно 9 или 10). Для многомодовых волокон диаметр сердцевины около 50 мкм (обычно 50 или 62,5). Диаметр оболочки у всех типов ОВ 125 мкм. Диаметр защитного покрытия 500 мкм:. Наружный диаметр кабеля с числом ОВ от 2...32 с учетом всех защитных оболочек и элементов обычно составляет 5...17 мм.
Затухание ОВ определяется потерями на поглощение и на рассеяние излучения в оптическом волокне. Потери на поглощение зависят от чистоты материала, потери на рассеяние — от неоднородностей показателя преломления материала.
Затухание ОВ неоднородно для разных длин волн. Зависимость коэффициента затухания а ОВ от рабочей длины волны приведена на рис.6.9. Данная зависимость имеет три минимума, называемые окнами прозрачного. Исторически первым было освоено первое окно прозрачности на рабочей длине волны 0,85 мкм. Первые полупроводниковые излучатели (лазеры и светодиоды) и фотоприемники были разработаны именно для данной длины волны. Коэффициент затухания в первом окне значителен и составляет единицы децибелов на километр (дБ/км). Позднее бы- ли созданы излучатели и фотоприемники, способные работать на больших длинах волн (1,3 и 1,55 мкм). Современные системы связи обычно используют второе или третье окно с малыми коэффициентами затухания. Современная технология позволяет получить ОВ с коэффициентом затухания порядка сотых долей децибела на километр.
Другой важнейший параметр оптического волокна — дисперсия — рассеяние во времени спектральных и модовых составляющих оптического сигнала. Существуют три типа дисперсии:
• модовая дисперсия присуща многомодовому волокну и обусловлена наличием большого числа мод, время распространения которых различно;
• материальная дисперсия обусловлена зависимостью показателя преломления от длины волны;
• полноводная дисперсия обусловлена процессами внутри моды и характеризуется зависимостью скорости распространения моды от длины волны.
Поскольку источники оптического излучения излучают некоторый спектр длин волн (светодиоды — 15...80 нм; лазеры — 0,1...4 нм), дисперсия приводит к уширению импульсов при распространении по волокну и тем самым порождает искажения сигналов. Уширение определяется как — длительность импульса соответственно на входе и выходе ОВ. Единицей измерения уширения является наносекунда на километр (нс/км). При оценке пользуются термином «полоса пропускания», АР=1/т — это величина, обратная уширению импульса при прохождении им по оптическому волокну расстояния 1 км. Полоса пропускания измеряется в мегагерц-километрах (МГц км). Из определения полосы пропускания видно, что дисперсия накладывает ограничение на дальность связи и на верхнюю частоту передаваемых сигналов.
Если при распространении света по многомодовому волокну как правило преобладает модовая дисперсия, то одномодовому волокну присущи только два последних типа дисперсии. На длине волны 1,3 мкм материальная и волноводная дисперсии в одномодовом волокне компенсируют друг друга, что обеспечивает наивысшую пропускную способность.
Затухание и дисперсия у разных типов оптических волокон различны. Одномодовые волокна обладают лучшими характеристиками по затуханию и по полосе пропускания. Однако одномодовые источники излучения в несколько раз дороже многомодовых. В одномодовое волокно труднее ввести излучение из-за малых размеров ОВ, по этой же причине сращивание одномодовых волокон сложно осуществить с малыми потерями. Монтаж оптических разъемов для одномодовых кабелей также обходится дороже.
Многомодовые волокна более удобны при монтаже, так как размер сердцевины в них в несколько раз больше, чем в одномодовых волокнах. Проще получается монтаж оптических разъемов для многомодового кабеля с малыми потерями (до 0,3дБ) на стыке. На многомодовое волокно рассчитаны излучатели на длину волны 0,85 мкм — доступные и дешевые излучатели, выпускаемые в очень широком ассортименте. Но затухание на этой длине волны у многомодовых волокон находится в пределах 3...4дБ/км и не может быть существенно улучшено. Полоса пропускания у много- модовых волокон достигает 800 МГц км, что приемлемо для локальных сетей связи, но недостаточно для магистральных линий. Полоса пропускания у одномодовых волокон может достигать 5000 МГц км.
Сегодня в мире существует несколько десятков фирм, производящих волоконно-оптические кабели (ВОК) различного назначения. Определяющими параметрами при производстве ВОК являются условия эксплуатации и пропускная способность линии связи. Основные требования к ВОК сформулированы в рекомендациях ITU T cepии G.650.
По условиям эксплуатации кабели подразделяют на монтажные, станционные, зоновые и магистральные. Первые два типа кабелей предназначены для прокладки внутри зданий и сооружений. Они компактны, легки и, как правило, имеют небольшую строительную длину. Кабели последних двух типов предназначены
1 2 Рис.6.10. Пример конструкции оптического кабеля: 1 — ОВ, 2 — полиэтиленовая трубка, 3 — силовой элемент, 4 и 5- соответственно внутренняя и внешняя полиэтиленовые оболочки
для прокладки в колодцах кабельных коммуникаций, в грунте, на опорах вдоль ЛЭП, под водой. Эти кабели имеют защиту от внешних воздействий и строительную длину более двух километров.
Для обеспечения большой пропускной способности линии связи производятся ВОК, содержащие небольшое число (до восьми) одномодовых волокон с малым затуханием, а кабели для распределительных сетей могут содержать до 144 волокон, как одномодовых, так и многомодовых, в зависимости от расстояний между сегментами сети.
При изготовлении ВОК в основном используются два подхода:
• конструкции со свободным перемещением элементов;
• конструкции с жесткой связью между элементами. Существуют многочисленные комбинации конструкций ВОК, которые в сочетании с большим ассортиментом применяемых материалов позволяют выбрать исполнение кабеля, наилучшим об- разом удовлетворяющее всем условиям проекта, в том числе стоимостным. На рис.6.10 приведен пример конструкции оптического кабеля.
Сращивание строительных длин оптических кабелей производится с помощью кабельных муфт специальной конструкции.
В настоящее время проводные линии связи широко используются при построении сетей. Данные линии связи стандартизированы и обычно называются структурированной кабельной системой (СКС) [6.4,6.101. Известны СКС категорий 3,4,5 стандартов EIA/TIA-568, Т$В-36, TSB-40 специального подкомитета TR41.8.1. Приведем основные параметры проводки:
• длина горизонтальных кабелей — не более 90 м независимо от типа кабеля;
• к применению допускаются кабели четырех типов: 4-парный из неэкранированных витых пар с волновым сопротивлением 100 Ом; 2-парный из экранированных витых пар с волновым сопротивлением 150 Ом; коаксиальный с волновым сопротивлением 50 Ом; волоконно-оптический с волокнами диаметром 62,5/125 мкм;
• типы соединителей: модульный 8-контактный RJ-45; 4-контактный по стандарту IEEE 802.5; коаксиальный BNC; оптический не определен;
• на каждом рабочем месте устанавливается не менее двух розеток;
• разводка кабелей должна соответствовать топологии «звезда». Общая структура CKC показана на рис.6.11.
В радиолиниях связи средой распространения электромагнитных волн в подавляющем большинстве случаев (за исключением случая связи между космическими аппаратами) является атмосфера Земли. На рис.6.12 приведено упрощенное строение атмосферы Земли.
Реально строение атмосферы более сложно и приведенное деление на тропосферу, стратосферу и ионосферу достаточно условно. Высота слоев приблизительна и различна для разных географических точек Земли. Около 80% массы атмосферы сосредоточено в тропосфере и около 20% — в стратосфере.

Плотность атмосферы в ионосфере крайне мала, граница между ионосферой и космическим пространством является условным понятием, так как следы атмосферы встречаются даже на высотах более 400 км. Считается, что плотные слои атмосферы заканчиваются на высоте около 120 км.
Типичный вид радиолинии показан на рис.6.13. Линия может состоять из двух оконечных станций, примером таких радиолиний являются линии сетей передачи сообщений массового характера (сети телевизионного и радиовещания). Радиолиния может содержать несколько промежуточных переприемных станций. Так строятся линии радиорелейных систем передачи.
Классификация и способы распространения радиоволн приведены в табл.6.2 и 6.3. Деление радиоволн на диапазоны установлено Международным регламентом радиосвязи ITU-В.
Радиоволны, излучаемые передающей антенной, прежде чем попасть в приемную антенну, проходят в общем случае сложный путь. На значение напряженности поля в точке приема оказывает влияние множество факторов. Основные из них:
• отражение электромагнитных волн от поверхности Земли;
• преломление (отражение) в ионизированных слоях атмосферы (ионосфере);
• рассеяние на диэлектрических неоднородностях нижних слоев атмосферы (тропосфере);
• дифракция на сферической выпуклости Земли.
Кроме того, напряженность поля в точке приема зависит от длины волны и освещенности земной атмосферы Солнцем и ряда других факторов.
АНАЛОГОВЫЕ СИСТЕМЫ ПЕРЕДАЧИ
7.1. ДВУСТОРОННЯЯ ПЕРЕДАЧА СИГНАЛОВ
Ко многим системам связи предъявляется требование обеспечения одновременной и независимой передачи сигналов в двух направлениях-требование двустороннее связи [2,3,7]. Для opгaнизации двусторонней связи, например между станциями А и Б, используются два канала однонаправленного действия, образующие двунаправленный четырех проводный канал (рис.71). Проходящие через однонаправленный канал сигналы усиливаются с коэффициентами усиления SA Б и S~A.
Двунаправленный двухпроводный канал образуется из четырехпроводного при помощи развязывающих устройств (РУ). Зажимы 1 — 1 РУ называют линейными. Прохождение сигналов от линейных зажимов РУ станции А к линейным зажимам РУ станции Б, а также в противоположном направлении показаны на рис.71 с по- мощью сплошной и штриховой линий.
Затухание сигналов между линейными зажимами станций А и Б называется остаточным затуханием двухпроводного канала:
Желательно, чтобы 1 были минимальны. Основная трудность при организации перехода от четырех двухпроводному каналу с помощью РУ состоит в появлении петли обратной связи (ОС). Сигнал, попадая в двухпроводный канал, начитает
циркулировать по петле ОС, что приводит к искажениям формы сигналов и в пределе — к самовозбуждению канала.
Затухание, которое претерпевает сигнал, проходя от зажимов 4 — 4 к зажимам 2 — 2 РУ, называется переходным, а..
Затухание по петле ОС, равное сумме всех затуханий и усилений, Б ЗБ-А носит специальное название — запас устойчивости. Если a<0, то канал неустойчив и самовозбуждается.
В качестве РУ в современных системах передачи широко используется дифференциальная система (дифсистема, ДС), выполненная на основе симметричного трансформатора со средней точкой (рис.7.2) (полуобмотки II и Ш идентичны). В состав ДС входит сопротивление Z,, называемое балансным. Оно приближенно отражает свойства входного сопротивления абонентской линии.
К ДС предъявляются требования минимального затухания в рабочих направлениях и максимального переходного затухания. Данные требования выполняются при соблюдении так называемого условия баланса ДС. Условием баланса ДС в направлении 4-4-~2-2 является равенство входного сопротивления абонентской линии и балансного сопротивления: Z,Д=Z~. Условием баланса ДС в направлении 1 — 1-+3-3 является равенство входного сопротивления первой полуобмотки дифференциального трансформа- тора и входного сопротивления направления приема четырех- проводного канала:
В случае сбалансированной ДС мощность входных сигналов, подводимых к зажимам 1 — 1 и зажимам 4 — 4, передается на соответствующие выходные зажимы 2 — 2 и 1 — 1 не полностью, а лишь частично, и входные сигналы испытывают так называемые рабочие затухания ДС: а4,=а10lg2=3 дБ. В реальных ДС за счет неидеальности трансформатора рабочие затухания несколько больше.
Переходное затухание реальной ДС также является конечной величиной. Оно зависит в основном от точности равенства входного сопротивления абонентской линии и балансного сопротивления. Точно выполнить это равенство на практике не представляется возможным, поскольку к одной и той же ДС могут подключаться абонентские линии с существенно различающимися характеристиками. В то же время характеристики балансного сопротивления являются постоянной величиной. Балансное сопротивление (балансный контур) обычно выполняется в виде последовательно включенных резистора сопротивлением 6000м и конденсатора емкостью 1 мкФ. Поэтому величина переходного затухания реальных ДС обычно не превышает 20...40 дБ.
СТАНДАРТНЫЙ КАНАЛ ТОНАЛЬНОЙ ЧАСТОТЫ
Канал тональной частоты (ТЧ) является единицей измерения емкости систем передачи и используется для передачи телефонных сигналов, а также сигналов данных, факсимильной и телеграфной связи. Такой канал включает в себя двухпроводное окончание и четырехпроводный тракт. Дифсистема служит для перехода с четырехпроводного тракта к двухпроводному окончанию. Удлинители (устройства внесения затухания) в двухпроводном окончании имеют затухание 3,5дБ и называются транзитными. Характеристики канала ТЧ нормируются рекомендациями ITUT серии М. В нашей стране требования ITU T уточняют «Нормы на электрические параметры каналов ТЧ магистральной и внутризоновых первичных сетей», введенные в действие приказом Министерства связи №43 от 15.04.96. Рассмотрим основные характеристики канала ТЧ [4,5].
Нормированные (номинальные) измерительные уровни в стандартных точках канала ТЧ составляют (рис.7.3): на входе канала 0 дБм, на выходе транзитного удлинителя — 3,5 дБм, на входе
четырехпроводного тракта -13 дБм, на выходе четырехпроводного тракта 4,3дБм, на входе транзитного удлинителя — 3,5дБм и на выходе канала -7 дБм.
Входное Z,Д и выходное ZД,Д сопротивления канала ТЧ равны 600 Ом. Отклонение входного и выходного сопротивлений от номинального Е„оценивается коэффициентом отражения р = I (ZД — 2,)/(ZД+Z,) I или затуханием несогласованности (отражения)— реальное значение сопротивления. Значение не должно превышать 10%.
Остаточное затухание канала ТЧ равно разности суммы затуханий и суммы усилений в канале: составляет 7дБ. Максимальное отклонение во времени на одном транзитном участие не должно превышать 2,2 дБ с вероятностью 0,95.
Эффективно передаваемая полоса частот (ЭППЧ) канала ТЧ — полоса, на крайних частотах которой (0,3 и 3,4 кГц) остаточное затухание на 8,7дБ превышает остаточное затухание на частоте 800 Гц. Частотная характеристика отклонения канала ТЧ от номинала 7 дБ должна оставаться в пределах шаблона (рис.7.4) при максимальном числе транзитов, т.е. при 12 переприемных участках.
Фазочастотные искажения не являются столь существенными при передаче речи. Но так как каналы ТЧ используются также для передачи данных и факсимильной связи, большие фазочастотные искажения недопустимы. Поэтому формируется отклонение группового времени передачи (ГВП) от его значения на частоте 1900 Гц на одном транзитном участке длиной 2500 км (рис.7.5).

На выходе канала ТЧ кроме информационного сигнала присутствуют помехи, которые определяются на приемном конце в точке с относительным уровнем — 7дБ. Среднее значение псофометрического (взвешенного) напряжения помех в канале в течение любого часа на одном переприемном участке длиной 2500 км не должно превышать 1,1 мВпсоф (10000 пВтпсоф в точке относительного нулевого уровня).
Стандартные каналы ТЧ, организованные с помощью цифровых и оптических систем передачи, являются более высококачественными. Поэтому ряд характеристик цифровых каналов ТЧ имеют следующие отличия.

Нормы на амплитудно-частотные искажения заданы ITU-Т в виде шаблона (рис.7.6). Если сравнить допустимые отклонения остаточных затуханий цифровых и аналоговых каналов ТЧ (см. рис.74), можно отметить, что нормы для цифровых каналов более жесткие. То же можно сказать и о фазочастотных искажениях (рис.7.7).
Для цифровых каналов ТЧ вводится дополнительная характеристика, которая оценивает шумы квантования. Эта характеристика задается в виде зависимости отношения сигнал/шум (ОСШ) от уровня сигнала (рис.7.8).
ШИРОКОПОЛОСНЫЕ КАНАЛЫ
Современные системы передачи позволяют организовать кроме стандартных каналов ТЧ каналы с более высокой пропускной способностью. Увеличение пропускной способности достигается расширением ЭППЧ, причем широкополосные каналы образуются объединением нескольких каналов ТЧ.
В настоящее время аналоговые системы передачи предусматривают образование следующих широкополосных каналов:
• предгруппового канала с полосой частот 12...24 кГц вместо трех каналов ТЧ;
• первичного канала 60...108 кГц вместо 12 каналов ТЧ;
• вторичного канала 312...552 кГц вместо 60 каналов ТЧ;
• третичного канала 812...2044 кГц вместо 300 каналов ТЧ.
Кроме перечисленных каналов в системах передачи формируются каналы вещания и телевидения (со звуковым вещанием).
7.3. ФОРМИРОВАНИЕ СТАНДАРТНЫХ ГРУППОВЫХ СИГНАЛОВ
Для организации на одной линии передачи большого числа каналов в аналоговых системах передачи используют метод частотного разделения каналов и амплитудную модуляцию для формирования отдельных канальных сигналов.
Как отмечалось выше, наиболее сложным блоком амплитудных модуляторов и демодуляторов является полосовой фильтр. Иногда (при высоких значениях несущей частоты) ширина полосы расфильтровке настолько мала, что выполнить высокодобротные фильтры трудно или невозможно. В этих случаях по экономическим соображениям, в том числе с целью уменьшения количества типов используемых фильтров, объединение канальных сигналов в групповой осуществляется методом многократного преобразования частоты.
При многократном преобразовании (рис.7.9) сигнал проходит последовательно через несколько преобразователей частоты (ПЧ) с различными несущими частотами. Абсолютная ширина полосы расфильтровке на выходе каждого последующего ПЧ больше, чем на выходе предыдущего, что позволяет увеличивать значение не- сущих частот без уменьшения относительной ширины полосы расфильтровки.
Однако общее число преобразователей и, следовательно, общее число разнотипных фильтров оказывается очень большим. В N-канальной системе число фильтров и их типов равно Nn, где и- число ступеней преобразования. Число фильтров и их типов можно уменьшить, если дополнить многократное преобразование групповым, при котором преобразованию подвергается групповой сигнал. С этой целью И каналов разбивают на т групп по К каналов, т.е. Km=N. В каждой группе сигнал каждого канала подвергается индивидуальному преобразованию с помощью несущих частот (рис.710). Во всех группах преобразование однотипно, поэтому на выходе каждой группы образуется один и тот же спектр частот. Полученные групповые спектры подвергаются затем групповому преобразованию с несущими так что после объединения преобразованных групповых сигналов образуется спектр частот И каналов. В рассматриваемом случае общее число фильтров равно N+mnД, а число типов фильтров сокращается до K+mn,q, где и число групповых ступеней преобразования.
Таким образом, применение многократного и группового преобразования позволяет унифицировать фильтровое оборудование системы, т.е. уменьшить его разнотипность. Такая унификация повышает технологичность изготовления узлов аппаратуры и, в конечном счете, удешевляет ее.
Кроме того, применение группового преобразования и стандартизации методов формирования групп каналов дает возможность унифицировать часть оборудования различных систем. По этой причине ITU-Т были стандартизированы следующие основные группы каналов.
Первичная группа (ПГ): 12 каналов ТЧ, спектр 60...108 кГц. Образуется однократным преобразованием с помощью несущих частот 64,68,72,...,108 кГц или двукратным преобразованием с помощью образования четырех трехканальных групп на несущих 12,16, 20 кГц и их последующего преобразования на несущих 84,96,108, 120 кГц.
Вторичная группа (Bl ): 60 каналов ТЧ, спектр 312...552 кГц. Образуется из пяти ПГ с помощью несущих 420,468,516,564, 612 кГц. Возможность параллельной работы фильтров обеспечивается их подключением через развязывающий блок параллель- ной работы первичных групп.
Третичная группа (ТГ): 300 каналов ТЧ, спектр 812...2044 кГц. Образуется из пяти ВГ с помощью несущих (1364+(и-1) 248) кГц, где и — номер ВГ в спектре ТГ.
Четверичная группа (ЧГ): 900 каналов ТЧ, спектр 8 516...12388 кГц. Образуется из трех ТГ. Может также формироваться из 15 ВГ.
Совокупность преобразовательного оборудования всех групп носит название каналообразующей аппаратуры. Ее назначение заключается в преобразовании индивидуальных сигналов в групповой сигнал одной из стандартных групп. Использование каналообразующей аппаратуры позволяет строить оконечную аппаратуру систем передачи различной емкости на основе стандартного преобразовательного оборудования и, следовательно, создавать унифицированное техническое оборудование.
7.4. ОСНОВНЫЕ УЗЛЫ СИСТЕМ ПЕРЕДАЧИ
Основной тип преобразователя частоты, применяемый в системах передачи с частотным разделением каналов (СП с ЧРК), представляет собой амплитудный модулятор с полосовым фильтром, включенным на его выходе. Фильтр выделяет одну из боковых полос частот в спектре выходного сигнала модулятора и подавляет на 65...70 дБ неиспользуемую полосу частот.
Генераторное оборудование СП с ЧРК предназначено для получения колебаний индивидуальных и групповых несущих частот, а также контрольных частот. Каждое из этих колебаний должно удовлетворять ряду требований, важнейшими из которых являются стабильность частоты и амплитуды, помехозащищенность, надежность.
В современных СП все колебания несущих и контрольных частот вырабатываются в генераторном оборудовании (ГО), содержащем (рис.711): задающий генератор (ЗГ), аналоговые перемножителя
частоты в виде генераторов гармоник (ГГ), делитель частоты (ДЧ), узкополосные фильтры (ПФ), выделяющие соответствующие гармоники и т.д., усилители, обеспечивающие необходимую мощность несущих и контрольных частот.
Стабильность и точность частоты ЗГ устанавливается на основе требований ITU-Т по допустимому сдвигу частот в канале ТЧ при прохождении сигналом двух станций. При этом сдвиг частот не должен превышать 1 Гц. Для получения высокой стабильности частоты ЗГ стабилизируется кварцевым резонатором, помещенным в термостат.
Колебания, вырабатываемые ГО, должны быть защищены от помех, особенно от гармоник частоты напряжения питающей сети 50 Гц. В большинстве аналоговых СП предусмотрено 100%-ное резервирование узлов ГО, причем переключение на резервное оборудование, как правило, происходит автоматически.
7.5. МЕТОДЫ ОРГАНИЗАЦИИ ДВУСТОРОННИХ ТАКТОВ
Различают две основные схемы организации двусторонних тактов: В однополосной четырехпроводной схеме (рис.712,а) линейные тракты имеют совпадающие спектры. При использовании симметричных кабелей во избежание значительных взаимных влияний линейные тракты размещаются в различных кабелях. Такая схема называется двухкабельной. При использовании коаксиального кабеля взаимные влияния практически отсутствуют, поэтому коаксиальные пары могут размещаться в одном кабеле. Такая схема называется однокабельной.
В двухполосной двухпроводной схеме (рис.712,б) используется один и тот же линейный тракт. При этом связь в противоположных направлениях передачи организуется в разных полосах частот при помощи пары («вилки») направляющих фильтров ФВЧ и ФНЧ.
7.6. КРАТКАЯ ХАРАКТЕРИСТИКА СИСТЕМ ПЕРЕДАЧИ
Системы передачи для магистрального участка первичной сети. К-1920П. Позволяет организовать 1920 каналов ТЧ или 300 каналов ТЧ и канал телевизионного (ТВ) и звукового вещания (3B). В первом случае линейный спектр формируется из шести ТГ и двух ВГ в полосе частот 312...8524 кГц. Во втором случае преобразуются пять ВГ, которые совместно с каналами ТВ и 3B занимают полосу частот 273...8491кГц. Дальность действия 12500 км, максимальная длина пере приемного участка по ТЧ 1500 км. В линейном трак- те используются ОУП и НУП. Питание НУП осуществляется дистанционно. Между двумя ОУП может размещаться до 40 НУП. Длина усилительного участка 6+0,15 км.
К-3600. Позволяет организовать 360 каналов ТЧ или 1800 каналов ТЧ, а также канал ТВ и 3B. Линейный спектр 812...17596 кГц. Дальность действия 12500 км. В линейном тракте используются ОУП и НУП. Питание НУП осуществляется дистанционно. Между двумя ОУП может размещаться до 61 НУП. Длина усилительного участка 3+0,15-км.
К10800 и К-5400. Линейный спектр 4...60МГц. Небольшая длина усилительного участка, равная 1,5 км, обусловила высокую стоимость каналокилометра, получаемого с помощью К-10800. К-5400 имеет линейный спектр 4...32 МГц, за счет чего длина усилительного участка у данной системы равна 3+0,15 км. Это позволяет использовать систему передачи К-5400 для реконструкции магистралей, оборудованных К-1920П и К-3600.
На магистральном участке первичной сети также используются системы передачи VLT-1920, ВК-960. Распределительная система К1020Р образует с системой К-3600 единый комплекс и предназначена для распределения каналов по промежуточным пунктам основной магистрали.
Системы передачи для зонового участка первичной сети. К-300. Предназначена для работы по коаксиальному кабелю МКТ-4 с четырьмя парами. Организуется два линейных тракта общей емкостью 600 каналов ТЧ. Линейный спектр формируется из пяти ВГ в полосе частот 60...1300 кГц. Дальность действия системы составляет 12500 км, что позволяет использовать ее при небольшой потребности в каналах на магистральном участке первичной сети.
К-120 и К-420. Используются однокоаксиальные кабели, поэтому линейный тракт организован по двухполосной схеме. В прямом направлении передается спектр 60...552 кГц, в обратном— 812...1304 кГц. Система К-420 разработана для модернизации участков зоновой сети, оборудованных К-120. Прирост канальной емкости составляет 300 каналов ТЧ.
К-60П и К-1020С. Используются симметричные кабели с различным числом пар (четверок). Система К-60П широко распространена на сетях связи. Линейный спектр составляет 12...252 кГц и формируется путем преобразования одной стандартной ВГ. Значительное число линий передачи магистральной сети организовано с применением симметричного кабеля и системы К-60П. С целью увеличения канальной емкости при использовании существующих симметричных линий передачи была разработана система К-1020С. Линейный спектр образуется из двух ВГ и трех ТГ и занимает полосу частот 312...4636 кГц.
Системы передачи для местного участка первичной сети. Системы передачи местной сети работают по симметричным кабелям и воздушным линиям связи. Требования, предъявляемые к системам городского и сельского участков сети, существенно различаются. Городские системы передачи предназначены для организации большого числа каналов на сравнительно малые расстояния, в то время как сельские — для организации малого числа каналов на сравнительно большие расстояния.
КАМА. Позволяет организовать 30 каналов ТЧ. Используются симметричные кабели разных типов. Связь организуется на сравнительно небольшое расстояние — максимальная дальность связи не превышает 80 км при наличии в линейном тракте шести НУП. Если протяженность линии передачи не превышает 15 км, система КАМА работает без применения промежуточных усилительных станций.
КНК-6Т и КНК-12Т. Предназначены для организации соедини- тельных линий между сельскими АТС. Используются одночетверочные симметричные кабели. Максимальная длина связи составляет 105 и 120 км в зависимости от диаметра жил используемого кабеля.
В-3-3 и В-12-3. Предназначены для работы по ВЛС. Удельный вес на сельском и даже зоновом участках первичной сети еще длительное время останется значительным. Максимальная частота линейного спектра не превышает 150 кГц.
АВУ. Аппаратура абонентского высокочастотного уплотнения. Позволяет организовать на абонентской линии один дополнительный канал. Осуществляется преобразование на несущей 28 кГц при передаче от абонента к станции, и на несущей 64 кГц в обратном направлении.
ЦИФРОВАЯ ОБРАБОТКА АНАЛОГОВЫХ СИГНАЛОВ
8.1. ДИСКРЕТИЗАЦИЯ СИГНАЛА ВО ВРЕМЕНИ
Формирование цифрового сигнала из аналогового [1 — 41 предусматривает последовательное выполнение трех основных операций:
• дискретизацию аналогового сигнала по времени, в результате чего формируется импульсный сигнал, промодулированный по амплитуде, т.е. АИМ сигнал;
• квантование АИМ сигнала по уровню;
• кодирование отсчетов АИМ сигнала.
В цифровых системах передачи (ЦСП) формируется групповой цифровой сигнал, иначе называемый сигналом импульсно- кодовой модуляции (ИКМ сигналом). При формировании группового ИКМ сигнала добавляется еще одна операция: перед квантованием по уровню производится объединение индивидуальных АИМ сигналов (рис.8.1).
В ЦСП соответствующие операции обработки производятся отдельными устройствами. Операции квантования и кодирования в ЦСП обычно объединяют в одном устройстве.
В процессе формирования АИМ сигнала осуществляется дискретизация непрерывного (аналогового) сигнала во времени в соответствии с известной теоремой (теоремой В.А. Котельникова): любой непрерывный сигнал, ограниченный по спектру верхней частотой F, полностью определяется последовательностью своих дискретных отсчетов, взятых через промежуток времени называемый периодом дискретизации.
Поскольку все реально существующие непрерывные сигналы связи представляют собой случайные процессы с бесконечно широким спектром, причем основная энергия сосредоточена в относительно узкой полосе частот, перед дискретизацией необходимо с помощью фильтра нижних частот ограничить спектр сигнала некоторой частотой F. Для телефонных сигналов необходимо использовать ФНЧ с частотой среза F;-3,4 кГц. Частота дискретизации для телефонных сигналов выбрана равной 8 кГц.
Устройство, выполняющее дискретизацию во времени, называют устройством выборки и хранения (УВХ) (рис.8.2). УВХ могут выпускаться в интегральном исполнении. Вид сигналов в точках 1, 2 и 3 УВХ показан на рис.8.3,а — в соответственно.
8.2. КВАНТОВАНИЕ МГНОВЕННЫХ ЗНАЧЕНИЙ СИГНАЛА
В процессе квантования по уровню значение каждого АИМ отсчета заменяется ближайшим разрешенным значением (рис.8.4).
Характеристиками квантующего устройства являются:
• число уровней квантования NД;
• шаг квантования 3 — разность между двумя соседними разрешенными уровнями;
• напряжение ограничения UД,— максимальное значение амплитуды отсчета, подвергаемого квантованию.
Если 5=const, то квантование называют равномерным. Амплитудная характеристика равномерного квантователя показана на рис.8.5.
Ошибка квантования — это разность между истинным значением отсчета и его квантованным значением. При равномерном квантовании ошибка квантования не превышает половины шага квантования.
При квантовании возникает так называемый шум квантования, мощность которого определяется выражением. Защищенность от шумов квантования определяется как мощность сигнала.
Если входное напряжение выше порогового, на выходе квантователя формируются отсчеты с амплитудой. Такой режим работы квантователя называется перегрузкой. При этом возникают шумы ограничения, мощность которых значительно превышает мощность шумов квантования. Необходимо применять специальные меры, предотвращающие перегрузку квантователя.
Для обеспечения не менее 30 дБ во всем динамическом диапазоне речевого сигнала требуется уровней квантования.
Большое число разрядов в коде (т=12) при равномерном квантовании приводит к усложнению аппаратуры и неоправданному увеличению тактовой частоты. Устранить указанный существенный недостаток можно, осуществляя неравномерное квантование, которое используется в современных цифровых системах передачи (ЦСП). Сущность неравномерного квантования заключается в следующем. Для малых значений сигналов шаг квантования выбирают минимальным и постепенно увеличивают до максимального для больших значений сигналов. Амплитудная характеристика неравномерного квантователя показана на рис.8.6.
При этом для слабых сигналов Р уменьшается, а для сильных — возрастает, что приводит к увеличению А для слабых сигналов и снижению А— для сильных, которые имели большой запас по помехозащищенности. В результате удается снизить разрядность кода до m=8 (NД=256), обеспечив при этом выполнение требований к защищенности от шумов квантования в широком динамическом диапазоне сигнала О составляющем около 40дБ. Таким образом, происходит выравнивание А в широком диапазоне изменения уровней сигнала.
Эффект неравномерного квантования может быть получен с помощью сжатия динамического диапазона сигнала с последующим равномерным квантованием. Сжатие динамического диапазона сигнала осуществляется с помощью компрессора, обладающего нелинейной амплитудной характеристикой. Чем большей нелинейностью обладает компрессор, тем больший выигрыш может быть получен для слабых сигналов.
Для восстановления исходного динамического диапазона сигнала на приеме необходимо установить экспандер (расширитель), амплитудная характеристика которого должна быть обратной амплитудной характеристике компрессора. Таким образом, результирующая (суммарная) амплитудная характеристика цепи компрессор-экспандер (коммандер) должна быть линейной во избежание нелинейных искажений передаваемых сигналов.
В современных ЦСП находят применение две логарифмические характеристики командирования (типов А и p), которые удобно изображать и описывать в нормированном виде где
Характеристика компандирования типа А используется в ЦСП, соответствующих европейской PDH, а типа р — в ЦСП, соответствующих североамериканской PDH (см. g 9.2).
8.3. КОДИРОВАНИЕ И ДЕКОДИРОВАНИЕ СИГНАЛОВ
В процессе кодирования амплитуда каждого квантованного по уровню АИМ отсчета представляется в виде двоичной последовательности, содержащей т символов (рис.8.7).
Как говорилось выше, для качественной передачи телефонного сигнала при равномерном и неравномерном квантовании нужно иметь соответственно 4096 и 256 уровней квантования, т.е. необходимо использовать 12- и 8-разрядный двоичный код.
Линейным кодированием называется кодирование равномерно квантованного сигнала, а нелинейным — неравномерно квантованного сигнала.
Код, формируемый в кодере, называется параллельным, если импульсные сигналы (1 и 0), входящие в состав т- разрядной кодовой группы, появляются на разных выходах кодера одновременно, причем каждому выходу кодера соответствует сигнал определен- ного разряда. Код называется последовательным, если все сигналы, входящие в состав т- разрядной кодовой группы, появляются на одном выходе кодера поочередно со сдвигом по времени (обычно начиная со старшего по весу разряда). Параллельный код может преобразовываться в последовательный, и наоборот.
Часто функции квантования и кодирования (соответственно декодирования и деквантования) выполняет одно устройство.
При кодировании с неравномерной шкалой квантования могут использоваться следующие способы:
• аналоговое командирование, характеризующееся компрессией (сжатием) динамического диапазона сигнала перед линейным кодированием и экспандированием (расширением) динамического диапазона сигнала после линейного декодирования;
• нелинейное кодирование, характеризующееся кодированием сигнала в нелинейных кодерах, сочетающих функции аналого-цифрового преобразования и компрессора;
• цифровое компандирование, характеризующееся кодированием сигнала в линейном кодере с большим числом разрядов с последующей нелинейной цифровой обработкой результата кодирования.
На практике наиболее часто используется нелинейное кодирование.
При частоте дискретизации F- кГц (Т;-125 мкс) и разрядности кода т=8 получаем скорость передачи сформированного ИКМ сигнала 64 Кбит/с, которая и является скоростью основного цифрового канала (ОЦК). Преобразование аналогового сигнала в сигнал ИКМ стандартизировано ITU T Рекомендацией G.711.
8.4. ПРЕОБРАЗОВАНИЕ ЦИФРОВОГО СИГНАЛА В АНАЛОГОВЫЙ
Преобразование ИКМ сигнала в аналоговый предусматривает последовательное выполнение основных операций:
• декодирование (преобразование ИКМ сигнала в АИМ сигнал);
• восстановление аналогового сигнала (выделение из спектра АИМ сигнала исходного сигнала).
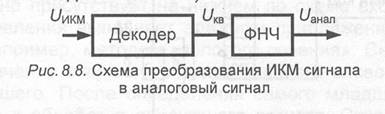
Временные диаграммы преобразований сигналов в схеме рис.8.8 показаны на рис.8.9. Сначала восстанавливается непрерывность сигнала во времени, а затем из спектра ступенчатого сигнала выделяется спектр исходного аналогового сигнала.
8.5. АНАЛОГО-ЦИФРОВОЙ И ЦИФРО-АНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛИ
Устройства, в целом выполняющие преобразования аналоговых сигналов в цифровые и обратно, называются соответственно аналого- цифровыми и цифро-аналоговыми преобразователями (АЦП и ЦАП).
Рассмотрим принцип работы ЦАП (рис.8.10). Цифровой сигнал в двоичном коде (последовательном или параллельном) подается на буферный регистр RG. К выходам регистра RG подключены управляющие входы электронных ключей. К каждому из ключей подключены резисторы с сопротивлениями, соответствующими числу шагов квантования каждого из разрядов кодового слова цифрового сигнала. В зависимости от кодовой комбинации, т.е. включения и выключения соответствующих ключей, на входе ФНЧ будет присутствовать соответствующее напряжение. Смена кодовых комбинаций приведет к образованию на входе ФНЧ ступенчатого сигнала (рис.8.9,б). ФНЧ выделяет исходный аналоговый сигнал.
Возможно построение АЦП на основе ЦАП. Схема такого АЦП показана на рис.8.11. Аналоговый сигнал поступает на вход устройства выборки и хранения (УВХ), где подвергается дискретизации, т.е. преобразуется в сигнал АИМ. Этот сигнал поступает на один из входов схемы сравнения
Рис.8.11. Структурная схема АЦП
(СС), которая представляет собой компаратор, сравнивающий значения аналоговых сигналов на своих входах. Если значение сигнала на первом входе СС больше, чем на втором, то на выходе СС будет присутствовать сигнал логической 1, в противном случае — логического О. Ко второму входу СС подключен аналоговый выход ЦАП.
Цифровые входы ЦАП подключены к порту вывода управляющего устройства (УУ), например микропроцессора. К порту ввода УУ подключен цифровой выход СС. Процесс квантования по уровню протекает следующим образом. Отсчет сигнала с выхода УВХ постоянно присутствует на нижнем по схеме входе СС. Устройство управления выполняет алгоритм приближения к данному значению, например, методом «золотого сечения». Сначала определяется значение старшего разряда кодового слова и далее до самого младшего. После определения самого младшего разряда схема готова к обработке следующего отсчета. Скорость работы схемы, т.е. частота дискретизации, зависит от скорости работы УУ и скорости преобразования ЦАП.
8.6. МЕТОДЫ РАЗНОСТНОГО КВАНТОВАНИЯ АНАЛОГОВЫХ СИГНАЛОВ
Между соседними отсчетами речевого сигнала имеется значительная корреляция, которая слабо убывает по мере увеличения интервала между отсчетами. Это означает, что речевой сигнал изменяется медленно, и разность между соседними отсчетами будет иметь меньшую дисперсию, чем исходный сигнал, что позволяет применять методы разностного квантования речевого сигнала (рис.8.12), где z- входной сигнал; z — оценка предсказанного значения входного сигнала; й — квантованный входной сигнал; ошибка предсказания; d — квантованная ошибка предсказания; е- ошибка квантования; Учитывая, что получаем.
Линейная дельта-модуляция (ДМ) (рис.8.13) использует одноразрядный (двухуровневый) квантователь и предсказатель первого порядка, на выходе которого имеем: z(k)=z(k — 1)+d(k). При этом входной сигнал квантователя имеет вид. Восстановление аналогового сигнала из сигнала линейной ДМ осуществляется суммированием шага квантования.
Линейная ДМ технически реализуется относительно просто, ~ но обладает рядом недостатков:
• перегрузка по крутизне;
• шум дробления (шум незанятого канала). Кроме того, для обеспечения приемлемого качества восстановления речевого сигнала требуется высокая скорость преобразования (передачи) — порядка 200 кбит/с.
Значение шага квантования при адаптивной ДМ меняется в зависимости от крутизны исходного сигнала от минимального до максимального. Возможны различные схемы (алгоритмы) адаптивной ДМ. Отслеживается выходной поток квантователя — при чередовании нуля и единицы шаг уменьшается, при последовательных нулях или единицах шаг увеличивается. Данный вид модуляции не получил широкого применения.
Дальнейшим развитием разностного квантования является дифференциальная ИКМ. Методы адаптации распространяются как на квантователь, так и на предсказатель. Осуществляется передача цифровых представлений адаптивного шага и коэффициентов предсказателя. Удовлетворительные результаты получаются при скорости передачи 32 и 24 кбит/с. ITU T стандартизировал данный вид модуляции в Рекомендации G.726 для скорости передачи 32 кбит/с.
8.7. ПАРАМЕТРИЧЕСКОЕ КОМПАНДИРОВАНИЕ РЕЧЕВЫХ' СИГНАЛОВ
Речевой сигнал как процесс, протекающий во времени, характеризуется рядом параметров, которые также являются функциями времени. Параметры, описывающие речевой сигнал, изменяются значительно медленнее, чем процесс в целом. Если по каналу связи
передавать не речевой сигнал, а информацию об описывающих его параметрах, то для этого потребуется канал связи с меньшей пропускной способностью. Если речевой сигнал представлен в виде совокупности медленно меняющихся параметров, то говорят о его параметрическом компандировании. Для выделения и кодирования параметров речевых сигналов используются сложные алгоритмы цифровой обработки сигналов. Как правило, чтобы обеспечить меньшую скорость передачи, примененяют более сложные алгоритмы, т.е. более производительные процессоры.
Для обеспечения совместимости вокодерных устройств opгaнизациям стандартизации в области телекоммуникаций установлен ряд стандартов (табл.8.1).
Качество передачи сигнала методами параметрического компандирования зависит как от вида применяемого алгоритма, так и от используемой скорости передачи. Качество передачи речевого сигнала оценивается различными субъективными методами, основанными на усреднении оценок, данных различными группами слушателей. Зависимость средней субъективной оценки (mean opinion score — MOS} от вида алгоритма и скорости передачи показаны на рис.8.14.
ЦИФРОВЫЕ СИСТЕМЫ ПЕРЕДАЧИ
9.1. ОСОБЕННОСТИ ПОСТРОЕНИЯ ЦИФРОВЫХ СИСТЕМ ПЕРЕДАЧИ
Основной тенденцией развития телекоммуникаций во всем мире является цифровизация сетей связи, предусматривающая построение сети на базе цифровых методов передачи и коммутации [2,6,11] с помощью цифровых систем передачи (ЦСП) и цифровых систем коммутации. Это объясняется следующими существенными преимуществами цифровых методов передачи перед аналоговыми.
Высокая помехоустойчивость. Представление информации в цифровой форме позволяет осуществлять регенерацию (восстановление) сигналов при передаче их по линии связи, что резко снижает влияние помех и искажений на качество передачи ин- формации.
Слабая зависимость качества передача от длины линии связи. В пределах каждого регенерационного участка искажения передаваемых сигналов оказываются ничтожными. Длина регенерационного участка и оборудование регенератора при передаче сигналов на большие расстояния остаются практически такими же, как и в случае передачи на малые расстояния. Так, при увеличении длины линии в 100 раз для сохранения неизменным качества передачи информации достаточно уменьшить длину регенерационного участка лишь на несколько процентов.
Стабильность параметров каналов. Стабильность и идентичность параметров каналов (остаточного затухания, частотной и амплитудной характеристик и др.) определяются в основном устройствами обработки сигналов в аналоговой форме. Поскольку такие устройства составляют незначительную часть оборудования ЦСП, стабильность параметров каналов в таких системах значительно выше, чем в аналоговых. Этому способствует также отсутствие в ЦСП влияния загрузки системы на параметры отдельных каналов.
Эффективность использования пропускной способности каналов для передачи дискретных сигналов. При вводе дискретных сигналов непосредственно в групповой тракт ЦСП скорость их передачи может приближаться к скорости передачи группового сигнала. Если, например, при этом будут использоваться временные позиции, соответствующие только одному каналу ТЧ, то скорость передачи будет близка к 64 кбит/с, в то время как в аналоговых системах она обычно не превышает 33,6 кбит/с.
Возможность построения цифровой сети связи. Цифровые системы передачи в сочетании с цифровыми системами коммутации являются основой цифровой сети связи, в которой передача, транзит и коммутация сигналов осуществляются в цифровой форме. При этом параметры каналов практически не зависят от структуры сети, что обеспечивает возможность построения гибкой разветвленной сети, обладающей высокими надежностными и качественными показателями.
Высокие технико-экономические показатели. Передача и коммутация сигналов в цифровой форме позволяют реализовывать оборудование на единых аппаратных платформах. Это позволяет резко снизить трудоемкость изготовления оборудования, значительно уменьшить его стоимость, потребляемую энергию и габариты. Кроме того, существенно упрощается эксплуатация систем и повышается их надежность.
Требования к ЦСП определены в рекомендациях ITU-Т серии О.
9.2. ИЕРАРХИИ ЦИФРОВЫХ СИСТЕМ ПЕРЕДАЧИ
Структура первичной сети предопределяет объединение и разделение потоков передаваемой информации, поэтому используемые на ней системы передачи строятся по иерархическому принципу. Применительно к цифровым системам этот принцип заключается в том, что число каналов ЦСП, соответствующее данной ступени иерархии, больше числа каналов ЦСП предыдущей ступени в целое число раз.
Аналоговые системы передачи с частотным разрешением каналов также строятся по иерархическому принципу, но в отличие от ЦСП для них ступенями иерархии являются не системы передачи, а типовые группы каналов.
Цифровая система передачи, соответствующая первой ступени иерархии, называется первичной; в этой ЦСП осуществляется прямое преобразование относительно небольшого числа первичных сигналов в первичный цифровой поток. Системы передачи второй ступени иерархии объединяют определенное число первичных потоков во вторичный цифровой поток и т.д.
В рекомендациях ITU-Т представлено два типа иерархий ЦСП: плезиохронная цифровая иерархия (ПЦИ) и синхронная цифровая иерархия (СЦИ). Первичным сигналом для всех типов ЦСП является цифровой поток со скоростью передачи 64 кбит/с, называемый основным цифровым каналом (ОЦК). Для объединения сигналов ОЦК в групповые высокоскоростные цифровые сигналы используется рассмотренный ранее принцип временного разделения каналов. Для преобразования первичных аналоговых (в том числе речевых телефонных) сигналов в ОЦК используется ИКМ (см. гл.8).
Появившаяся исторически первой плезиохронная цифровая иерархия (Plesiochronous Digital Hierarchy — PDH) имеет европейскую, североамериканскую и японскую разновидности (табл.9.1). Значения скоростей передачи в технической литературе обычно округляются (см. рис.9.1).
В североамериканской и японской PDH для цифровых потоков применяется обозначение Т (иногда DS), в европейской PDH — Е, а в японской — J. Цифровые потоки первого уровня обозначаются соответственно Т1 и Е1, второго Т2 и Е2 и т.д. На практике используются цифровые потоки до Е4 и ТЗ включительно. Для сетей связи РФ принята европейская PDH.
9.3. ЕВРОПЕЙСКАЯ ПЛЕЗИОХРОННАЯ ЦИФРОВАЯ ИЕРАРХИЯ
Скорости цифровых потоков одной и той же ступени PDH, но образуемых ЦСП, расположенными на различных станциях сети, могут отличаться друг от друга в пределах допустимой нестабильности частот задающих генераторов [4,6]. Именно поэтому рассматриваемая иерархия ЦСП называется плезиохронной. Наличие нестабильности задающих генераторов требует принятия специальных мер при объединении потоков в поток более высокой ступени иерархии, что заметно усложняет эксплуатацию первичной сети связи в целом и снижает ее качественные показатели.
Принцип объединения и разделения цифровых потоков европейской PDH показан на рис.9.1. Очевидно, что оконечные станции должны иметь только половину показанного оборудования. При выделении низкоскоростного потока (например, со скоростью 2 Мбит/с, как показано на рис.9.1) на промежуточной станции последняя должна иметь все оборудование, показанное на рис.9.1. На сети связи РФ эксплуатируются цифровые системы передачи PDH отечественного и зарубежного производства. Отечественные системы носят название ЦСП с ИКМ (цифровые системы передачи с импульсно-кодовой модуляцией). Вместо уровня иерархии в обозначении системы указывается число информационных ОЦК данной системы. Так, ЦСП первого уровня иерархии обозначается ИКМ-30, второго — ИКМ-120 и т.д. (см. табл.9.1). В на- стоящее время разработан и представлен на сети полный спектр аппаратуры, реализующей европейскую PDH.
ПРИНЦИПЫ СИНХРОНИЗАЦИИ ЦСП
В плезиохронных ЦСП используется принцип временного разделения каналов, поэтому правильное восстановление исходных сигналов на приеме возможно только при синхронной и синфазной работе генераторного оборудования (ГО) на передающей и приемной станциях. Для нормальной работы плезиохронных ЦСП должны быть обеспечены следующие виды синхронизации:
• тактовая — обеспечивает равенство скоростей обработки цифровых сигналов в линейных и станционных регенераторах, кодеках и других устройствах ЦСП, осуществляющих обработку сигнала с тактовой частотой FД.
• цикловая — обеспечивает правильное разделение и декодирование кодовых групп цифрового сигнала и распределение декодированных отсчетов по соответствующим каналам в приемной части аппаратуры;
• сверхцикловая — обеспечивает на приеме правильное распределение сигналов управления и взаимодействия (СУВ) по соответствующим телефонным каналам; СУВ представляют собой набор сигналов, управляющих работой АТС (набор номера, ответ, от- бой, разъединение и пр.)
Нарушение хотя бы одного из видов синхронизации приводит к потере связи по всем каналам ЦСП.
Структурная схема тактовой синхронизации включает в себя (рис.9.2) задающий генератор (ЗГ), входящий в состав ГО передающего оборудования оконечной станции (Пер) и вырабатывающий импульсную последовательность тактовой частоты Р„и устройства выделения тактовой частоты (ВТЧ), устанавливаемые в том оборудовании, где осуществляется обработка сигнала с частотой F,: в линейных регенераторах (ЛР) и приемном оборудовании (Пр) оконечной станции.
Наиболее распространенным методом выделения тактовой частоты является метод пассивной фильтрации, который состоит в том, что из спектра группового цифрового сигнала с помощью ВТЧ, содержащего высокодобротные резонансные контуры, фильтры-выделители или избирательные усилители, выделяется тактовая частота. Этот способ характеризуется простотой реализации ВТЧ, но имеет существенный недостаток: стабильность вы- деления тактовой частоты зависит от стабильности параметров фильтра-выделителя и структуры цифрового сигнала (при появлении длинных серий нулей или кратковременных перерывов связи затрудняется процесс выделения тактовой частоты).
Для высокоскоростных ЦСП перспективным, но более сложным является способ тактовой синхронизации с применением устройств автоподстройки частоты генератора тактовой частоты приемного оборудования (способ активной фильтрации).
Цикловая синхронизация осуществляется следующим образом. На передающей станции в состав группового цифрового сигнала в начале цикла вводится цикловой синхросигнал (СС). На приемной станции устанавливается приемник синхросигнала (ПСС), который выделяет цикловой синхросигнал из группового цифрового сигнала и тем самым определяет начало цикла передачи. Цикловой синхросигнал должен обладать определенными отличительными признаками, в качестве которых используется заранее определенная и неизменная структура синхросигнала (напри- мер, 0011011 в ЦСП ИКМ-30). Групповой цифровой сигнал в силу случайного характера информационных сигналов такими свойствами не обладает.
К системе цикловой синхронизации предъявляются следующие требования:
• время вхождения в синхронизм при первоначальном включении аппаратуры и время восстановления синхронизма при его нарушении должно быть минимально возможным;
• приемник синхросигнала должен обладать высокой помехоустойчивостью, т.е. иметь защиту от установления ложного синхронизма и от ложного выхода из синхронизма;
• число символов синхросигнала и частота повторения должны
быть минимально возможными.
Эти требования носят противоречивый характер, поэтому приходится принимать компромиссные решения.
Схемы ПСС (рис.9.3) обычно включают в себя блоки обнаружения СС на основе схем совпадения, счетчики обнаружения СС в данной временной позиции, счетчики-накопители по входу в синхронизм и выходу из синхронизма.
Работа системы сверхциклово0 синхронизации, как и работа системы цикловой синхронизации, основана на передаче сверх- циклового синхросигнала (СЦС) в одном из циклов сверхцикла (СЦ). Принцип работы приемника СЦС аналогичен работе ПСС.
ГЕНЕРАТОРНОЕ ОБОРУДОВАНИЕ ЦСП
Все процессы обработки сигналов в ЦСП строго регламентированы по времени. Последовательность обработки сигнала в оборудовании ЦСП задается генераторным оборудованием (ГО). обеспечивает формирование и распределение всех импульсных последовательностей, управляющих процессами преобразования
сигналов в ЦСП. В ГО передающей станции импульсные последовательности получают делением тактовой частоты высокостабильного ЗГ.
Обычно предусматриваются следующие режимы работы ГО:
• синхронизации, при котором осуществляется работа от высокостабильного автономного ЗГ (с относительной нестабильностью+10 ...10 );
• внешнего запуска, при котором осуществляется работа внешнего ЗГ;
• внешней синхронизации, при котором осуществляется подстройка частоты ЗГ с помощью ФАПЧ, управляемой внешним сиг- налом.
Структура ГО приемной станции отличается тем, что тактовая частота подается не от ЗГ, а от ВТЧ, а установка ГО приема по циклу и сверхциклу осуществляется с помощью сигналов, поступающих от приемников синхросигналов.
СТРУКТУРЫ КАДРОВ
Рассмотрим структуру кадра передачи ЦСП ИКМ-30 (рис.9.4). Данный поток называется первичным цифровым потоком и организуется объединением 30-ти информационных ОЦК.
Канальные интервалы КИ1 — КИ15, КИ17 — КИ31 отведены для передачи информационных сигналов; КИО и КИ16 — для передачи служебной информации; КИО в четных циклах предназначаются для передачи циклового синхросигнала (ЦСС), имеющего вид 0011011 и занимающего разряды Р2 — Р8. В разряде Р1 всех циклов передается информация постоянно действующего канала переда- чи данных (ПД). В нечетных циклах разряды РЗ и Р6 КИО используются для передачи информации о потере цикловой синхронизации (Авар. ЦС) и снижении остаточного затухания каналов до значения, при котором в них может возникнуть самовозбуждение. Разряды Р4,Р5,Р7 и Р8 являются свободными, их занимают единичными сигналами для улучшения работы выделителей тактовой частоты.
В КИ16 нулевого цикла (ЦО) передается сверхцикловой синхросигнал вида 0000 (Р1-Р4), а также сигнал о потере сверхцикловой синхронизации (Р6 — Авар. СЦС). Остальные три разрядных интервала свободны. В КИ16 остальных циклов (Ц1-Ц15) переда- ются сигналы служебных каналов (СК1 и СК2), причем в Ц1 передаются СК для 1- и 16-го каналов ТЧ, в Ц2 — для 2- и 17-го и т.д. Разряды РЗ, Р4, Р6 и Р7 свободны.
Принятая структура построения цифровых систем передачи PDH реализуется посредством объединения и разделения тем или иным способом типовых цифровых потоков. Сущность любого способа объединения заключается в том, что информация, содержащаяся в поступающих потоках, записывается в запоминающие устройства, а затем поочередно считывается в моменты, отводимые ей в объединенном потоке.
Различают объединение трех типов потоков: синфазно-синхронных, синхронных и асинхронных (плезиохронных). В первом типе объединения совпадают не только скорости объединяемых потоков, но и начала их отсчетов. Во втором типе объединения скорости потоков совпадают, но их начала отсчетов произвольно смещены друг относительно друга. Это заставляет вводить в объединенный поток специальный синхросигнал, указывающий порядок объединения. После синхросигнала передается информация первого объединяемого потока, затем — второго и т.д. В наиболее общем третьем типе объединения в объединенный поток помимо синхросигнала, указывающего порядок объединения, вводится служебная информация, обеспечивающая необходимое согласование скоростей объединяемых потоков.
Очевидно, возможны два случая несоответствия скорости записи объединяемого потока и скорости считывания объединенного потока:
• скорость считывания превышает скорость записи — при этом применяется так называемое положительное согласование (ПСС), представляющее собой вставку (стаффинг) дополнительного бита в объединяемый поток;
• скорость считывания меньше скорости записи — при этом применяется так называемое согласование скоростей (ОСС), представляющее собой передачу отстающего информационного бита вместо одного из служебных.
Операции разделения потоков являются обратными операциям объединения: информация объединенного потока записывается в запоминающие устройства, соответствующие исходным потокам, затем считывается со скоростями, равными скоростям объединяемых потоков.
В большинстве случаев объединение потоков осуществляется посимвольно (побитно), т.е. считывание информации из запоминающих устройств при объединении происходит по разрядам: вначале считывается и передается разряд первого потока, затем— второго и так далее, после считывания разряда последнего из объединяемых потоков вновь считывается очередной разряд первого, т.е. цикл повторяется.
Возможно объединение потоков и по группам символов. Например, в объединенном потоке можно вначале передать все символы, относящиеся к каналу или циклу передачи первого потока,
затем — такую же группу символов второго потока и т.д. Объединение по группам символов требует увеличения объема памяти оперативных запоминающих устройств пропорционально числу объединяемых групп символов.
Структура кадра вторичной ЦСП (ИКМ-120) (рис.9.5) является типичной для всех высших уровней этой иерархии. Цикл передачи имеет длительность 125 мкс и состоит из 1056 позиций. Цикл разделен

на четыре субцикла одинаковой длительности. Первые восемь битов первого субцикла заняты комбинацией 11100110, представляющей собой цикловой синхросигнал объединенного потока. Первые четыре бита второго субцикла заняты первыми символами команд согласования скоростей (КСС), а следующие четыре — сигналами служебной связи. Вторые и третьи символы КСС занимают первые четыре бита третьего и четвертого субциклов. Биты 5 — 8 третьего субцикла используются для передачи сигналов данных (два бита), аварийных сигналов (Ав.) и сигналов вызова (выз.) по каналу служебной связи (по одному биту). В битах 5 — 8 четвертого субцикла передается информация объединяемых потоков при ОСС. При ПСС исключаются биты 9 — 12 четвертого субцикла.
Кроме основных ЦСП, разработаны системы передачи, не входящие непосредственно в европейскую PDH. К ним относятся:
• субпервичная система ИКМ-15, преобразующая сигналы 15 телефонных каналов в цифровой поток со скоростью 1024 кбит/с. Цифровые потоки двух систем ИКМ-15 могут быть объединены устройством объединения «Зона-15» в первичный цифровой по- ток;
• аналого-цифровое оборудование АЦО-ЧРКВ, которое преобразует сигналы типовой вторичной группы каналов (60-канальной) системы передачи с ЧРК в три первичных цифровых потока;
• аналого-цифровое оборудование АЦО-ТВ, позволяющее преобразовывать канал телевизионного вещания и два канала звукового сопровождения (или один стерео) в три третичных цифровых потока.
Основные параметры ЦСП плезиохронной цифровой иерархии приведены в табл.9.2.