3.10. Квадратурная амплитудная модуляция
Так как при амплитудной модуляции защищенность сигнала от помех крайне низка, то применяют более помехоустойчивую, но и более сложную квадратурную амплитудную модуляцию (КАМ, или QAM — Quadrature Amplitude Modulation). Методы КАМ сочетают фазовую модуляцию с восемью значениями сдвига фазы и амплитудную модуляцию с четырьмя уровнями амплитуды. В модификациях КАМ из получающихся 32 возможных комбинаций используются не все, а лишь 6 или 7, остальные комбинации—
запрещенные. Избыточность кода и повышает его помехозащищенность. Для дуплексной передачи со скоростью 1200 или 2400 бит/с по коммутируемым телефонным сетям общего пользования и двух проводным двухточечным линиям рекомендациями МККТТ по стандартам V.22 и V.22бис (ГОСТ 20855 — 83) предусмотрено использовать частотное разделение полосы канала тональной частоты путем деления на два подканала. Несущая частота первого подканала (1200± 0,5) Гц, а второго — (2400± 1) Гц. При скорости передачи 2400 бит/с применяют 16-позиционную квадратурную амплитудную модуляцию со скоростью модуляции, равной 600 Бод в каждом квадратурном канале. При КАМ в такт с передаваемыми данными изменяются одновременно и фаза, и амплитуда сигнала (ФМ — АМ).
Рекомендуемое сигнальное пространство для КАМ-сигналов показано на рис. 3.19, а и б, где Ux и Uy — напряжения в квадратурных каналах КАМ-модулятора. КАМ-сигналы изображают точками или векторами в двумерном пространстве на плоскости, образованной синфазной осью Ux и квадратурной осью Uy, повернутыми
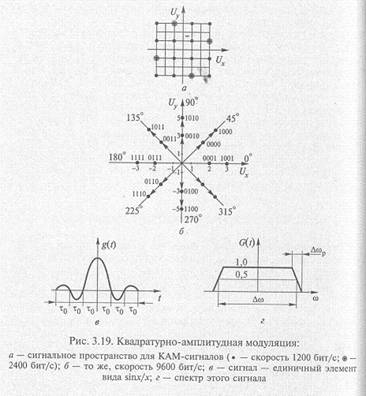
по отношению друг к другу на 900 (находящимися в квадратуре). Такое представление позволяет наглядно отобразить амплитудно-фазовые параметры — модуляционный формат этого класса сигналов.
Аналитически КАМ-сигналы описываются выражением
Единичные элементы КАМ-сигналов представляют собой отрезки синусоид на интервалах то, отличающихся амплитудами и начальными фазами. Когда скорость модуляции становится свыше 1200 Бод, происходит существенное расширение спектра, что при ограниченной полосе частот и наличии неравномерности частотных характеристик каналов тональной частоты приводит к заметным искажениям дискретных сигналов. Для уменьшения влияния частотных искажений, особенно больших на краях полосы пропускания канала, спектр единичных элементов ограничивают, а сами элементы наделяют свойствами отчетности. На рис. 3.19, в изображен единичный элемент вида sinx/х, представляющий собой функцию g(t) = [sin(∆ωt/2)]/(∆ωt/2), ограниченную на интервале Nτ0, где N — число гармонических составляющих. Этот элемент, используемый в современных системах передачи сообщений по каналам тональной частоты, удовлетворяет условию отчетности, т.е.
![]()
Спектр такого сигнала G(ω) показан на рис. 3.19, г, где ∆ω = = 2π/τ0 — эффективная полоса; ∆ωp — полоса расфильтровки.
В настоящее время в модемах применяются сигналы, в которых затухание за зоной расфильтровки составляет около 40...70 дБ, что удовлетворяет требованиям ГОСТ 26557 — 85.
3.11. Методы импульсной модуляции
В линиях беспроводной импульсной радиосвязи модулируется характеризующий импульс параметр: амплитуда, ширина импульса, частота повторений или фаза. Эти разные методы импульсной модуляции обозначаются соответственно АИМ (амплитудно-импульсная модуляция), ШИМ (широтно-импульсная), ЧИМ (частотно-импульсная) и ФИМ (фазоимпульсная). Последнюю иногда называют время-импульсной модуляцией, или ВИМ. На приемном конце обычно эти виды модуляции преобразуются в амплитудную модуляцию АМ и обозначаются АИМ — АМ, ШИМ АМ, ЧИМ — АМ, ФИМ — АМ. Применяются и разные сочетания этих методов с рассмотренными в предыдущих подразделах методами ЧМ и ФМ, например ШИМ — ЧМ, ШИМ — ФМ. Модуляция и демодуляция осуществляются модемами. Ширина полосы частот уже существующих аналоговых каналов и создаваемых в последнее время цифровых каналов должна быть достаточна для передачи импульсно-модулированных цифровых сообщений.
Часто АИМ состоит из процессов дискретизации информации (рис. 3.20, а) и передачи модулированной полученными дискретными импульсами несущей частоты. Высота АИМ-сигналов соответствует
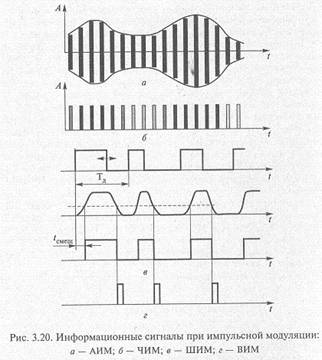
величине информационной выборки. Принятые АИМ сигналы демодулируются и оцифровываются. Устройство демодуляции на приемном конце должно быть засинхронизировано с модулятором на передающем конце.
При ЧИМ колебания несущей частоты модулируются не по амплитуде, а по частоте, сигналы выглядят так, как показано на рис. 3.20, б. Частота несущей соответствует величине информационной выборки.
При ШИМ каждая выборка дискретизированной последовательности импульсов на передающем конце создает импульсы, длительность (ширина) которых пропорциональна величине выборки (рис. 3.20, в). Эти импульсы переменной длительности, но с постоянным периодом дискретизации ТД используются затем для модуляции несущей частоты. Положение во времени одного фронта импульса остается постоянным, а положение другого меняется в соответствии со значением информации (на рис. 3.20, в стрелка указывает на изменение заднего фронта). При этом длительность каждого импульса пропорциональна мгновенному значению информации в момент появления подвижного фронта импульса. На выходе демодулятора несущей частоты, т.е. на выходе видео частотного канала (ВЧ), в приемном устройстве на фоне шумов получается ряд импульсов различной длительности. Импульсы на выходе ВЧ-канала имеют неидеально вертикальные фронты, так как время нарастания импульсов обратно пропорционально ширине полосы пропускания канала, выделенной для данной передачи. Для демодулирования этих импульсов принято прежде ограничивать их по уровню, обозначенному пунктирной линией, а затем усиливать и ограничивать части импульсов, лежащие выше этой линии так, чтобы «снять» шум в верхней части импульсов. Этим вызывается смещение сигналов во времени tсмещ.
Время-импульсная модуляция (ВИМ) отличается от ШИМ лишь тем, что роль переменного во времени фронта импульса выполняет короткий импульс (рис. 3.20, г). Практически ВИМ осуществляется дифференцированием напряжения (см. рис. 3.20, в) до подачи его в передающее устройство. Таким образом, при ВИМ колебания несущей частоты включаются только на время посылки короткого импульса, благодаря чему достигается экономия энергии по сравнению с ШИМ.
Во всех рассмотренных методах модуляции модулируемая величина изменялась непрерывно во всем своем диапазоне. Так как в телеметрии большинство подлежащих измерению величин изменяется непрерывно, то метод непрерывной модуляции и непрерывного получения данных и называется аналоговым методом.
3.12. Аналоговые модемы
В настоящее время самыми распространенными модемами являются аналоговые, позволяющие осуществлять прямое и обратное преобразования сигналов к виду, принятому для использования в определенном канале связи. Первые модемы выполняли прямое преобразование широкополосных импульсных телеграфных и телетайпных сигналов в узкополосные аналоговые, поступающие в начало линии связи (прямое преобразование). Они же осуществляли на приемном конце линии связи обратное преобразование узкополосного аналогового сигнала в узкополосные импульсы телеграфного кода. Модулятор представляет собой нелинейный электрический колебательный контур, амплитуда, фаза или частота колебаний которого динамично изменяется путем изменения (управления) параметров электрорадиоэлементов — конденсаторов, катушек индуктивности и резисторов. Иногда модуляторы включают в себя и кварцевый резонатор, позволяющий стабилизировать частоту колебаний.
Демодулятор преобразует высокочастотный модулированный сигнал в ток или напряжение с частотой модуляции (низкой, например, звуковой). Схема демодулятора представляет собой дискриминатор, включающий активный низкочастотный полосовой нелинейный электрический фильтр с переменными параметрами, пропускающий токи в определенной полосе частот с малым затуханием и не пропускающий токи с частотами, находящимися вне этой полосы. Много полосовые фильтры нижних частот используются и для разделения передаваемых одновременно по двух проводной линии нескольких передач (телефонных, телеграфных, вещательных, телевизионных и др.).
Преобразование в модемах данных и их передача выполняются в соответствии с протоколами передачи данных, регламентирующими каким должен быть формат данных, какой способ модуляции данных необходимо избрать с целью ускорения и защиты от помех их передачи, как выполнить соединение с каналом, как преодолеть действующие в канале шумы и обеспечить достоверность передачи. Стандарт МККТТ обычно включает в себя несколько протоколов обмена, редко — один. Для передачи данных по выделенным и коммутируемым аналоговым линиям используются модемы с аналоговой модуляцией сигнала.
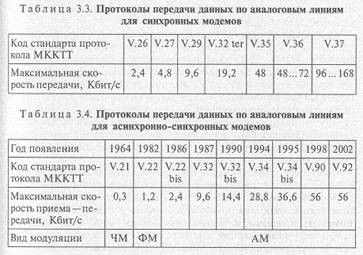
Модемы, работающие только в асинхронном режиме, поддерживают низкую скорость передачи данных. Так, модемы, работающие по стандарту V.23, обеспечивают скорость 1200 бит/с, по стандарту V.21 — 300 бит/с. Асинхронные модемы являются наиболее дешевыми средствами преобразования информации и неприхотливыми к качеству линии.
Модемы, работающие только в синхронном режиме, дороже асинхронных и требуют более качественных линий передачи. Для выделенных каналов тональной частоты разработано много стандартов, поддерживающих дуплексный режим. Параметры некоторых из них приведены в табл. 3.3. Стандарт (шкала) скорости передачи данных соответствует стандарту протоколов МККТТ для телефонных каналов и ГОСТ 20855 — 83.
Для асинхронно-синхронных модемов разработан ряд стандартов, часть из которых приведена в табл. 3.4.
Начиная с протокола передачи V.22 bis используются сложные методы кодирования данных, при которых в каждый момент времени элемент данных представляется не двумя, а большим количеством значений модулируемого параметра сигнала. Скорость, передачи при этом повышается, но несколько ухудшается помехозащищенность сигналов.
Наибольшее распространение в современных модемах получил протокол дуплексной передачи стандарта V.90. Он обеспечивает
прием данных со скоростью 56 Убит/с, а передачу — со скоростью до 33,6 Убит/с. Стандарт позволяет тестировать канал связи и определить оптимальный для него режим работы модемов, т.е. несущую частоту, полосу пропускания, скорость передачи, уровень передаваемого сигнала. Начальное соединение может осуществляться на минимальной скорости передачи 300 бит/с, которая характерна для линий самого низкого качества. Затем происходит идентификация модемов на обоих концах канала связи, определяется тип используемой модуляции и выбирается эффективная скорость передачи.
Новый протокол V.92, не увеличивая скорости приема данных, поднимает максимальную скорость их передачи до 48 Убит/с. В него добавлена функция временного удержания соединения modem-on-hold (модем захвачен, занят), дающая ответ на телефонный вызов в момент, когда линия занята модемом, находящимся на связи. Линия не будет занята при работе в Интернете, и пользователь может ответить на телефонный вызов и вести разговор в течение 16 мин без разрыва модемной связи. Длительность времени разговора может быть изменена по разрешению Интернет-провайдера.
Передача файлов по телефонным линиям осуществляется по специальным протоколам Xmodem, Ymodem, Zmodem и Kermit, регламентирующим дополнительно разбиение информации на блоки, использование корректирующих кодов, повторную пересылку неверно принятых блоков, восстановление передачи после обрыва и др. На телефонных линиях России самым распространенным и рекомендуемым является Zmodem.
Современные модемы кроме собственно модулирования-демодулирования и процедур передачи информации обеспечивают и другие функции, такие, как автоматическое определение номера вызывающего абонента (АОН), приема и передача факсимильных сообщений (факс-модемы), автоответчик и электронный секретарь, оцифровка и восстановление голоса (voice-модемы) и др. Работой модема управляет специализированный микропроцессор, имеются оперативное и постоянное (иногда перепрограммируемое) запоминающие устройства, световая и звуковая сигнализация о режимах работы, характеристиках канала связи и о конфигурации модема.
Существуют два класса модемов — Class 1 и Class 2. Модемы Class 1 называются программными (software) и работают под управлением Windows, из-за чего их иногда называют Win-модемами. Часть функций реализуется программой, выполняемой центральным процессором ПК, что удешевляет модем, но дополнительно нагружает компьютер. Модемы Class 2 называются аппаратными (hardware). Они дороже, но более эффективны при работе в многозадачных операционных системах. Hard-модемы просты . в настройке, не требуют ресурсов ПК и хорошо держат плохие телефонные линии.
Еще два типа сверхсовременных модемов — AMR (Audio and Modem Riser Card) и CNR (Communication and Networking Riser Card) очень дешевы, но могут работать только с новейшими Intel чипсетами и с тональными набирателями номера. (Чипсет — это набор системных микросхем, обеспечивающих работу микропроцессора и других узлов ЭВМ.)
Конструктивно модемы могут быть внутренними или внешними, т.е. выполненными соответственно в виде платы, вставляемой в слот системной платы компьютера, или в виде самостоятельного блока. Наиболее популярны в России модемы фирм ZyXEL и US Robotics. Многие типы модемов обеспечивают разнообразные сервисные услуги, например автоматические рассылку, прием и распечатку факсов, запись и прослушивание речевого сообщения, АОН и др.
3.13. Спектры частот, применяемые для электрической связи, и физическая среда каналов связи
В низкоскоростных и среднескоростных каналах связи (КС) физической средой передачи информации обычно являются проводные линии связи, представляющие собой группы параллельных проводов либо скрученных попарно для уменьшения перекрестных наводок между проводниками («витая пара»). Неэкранированные кабели с витыми парами из медных проводов обозначаются UTP (Unshielded Twisted Pair — незащищенная скрученная пара).
Проводная связь на небольшие расстояния (в черте города, в пригородах), как правило, организуется без преобразования частот. На большие расстояния, наоборот, все виды связи — телефонная, телеграфная, радиовещание, телевидение — организуются с преобразованием частот, что позволяет лучше использовать кабельные и воздушные линии связи.
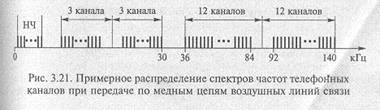
По воздушным цепям с медными проводами осуществляется до 16 телефонных связей одновременно. Для этого используется спектр частот примерно до 150 кГц. Ориентировочное распределение телефонных каналов (в канале укладывается спектр частот одного направления передачи) приведено на рис. 3.21. Стрелками показаны направления передачи. Это значит, что если организуется телефонная (дуплексная) связь, то каждая телефонная передача в одном направлении осуществляется по каждому каналу из группы каналов, отмеченных стрелкой справа налево, а второе (обратное) направление передачи происходит по каждому каналу из группы каналов, отмеченных стрелкой слева направо. Один канал занимает спектр частот 4 кГц, следовательно, для телефонной связи необходима полоса в 8 кГц. В одном телефонном канале (в полосе частот 4 кГц) можно организовать до 18 телеграфных связей.
По кабельным цепям так называемой симметричной конструкции передаются частоты до 256 кГц. Эти кабели представляют собой два или четыре изолированных медных провода, скрученные в группы, объединенные в водонепроницаемой оболочке (например, свинцовой) и покрытые броней. Обозначаются они STP (Shielded Twisted Pair). Таким образом, для телефонирования по воздушным симметричным кабелям используются частоты, находящиеся в области длинных волн (см. рис. 3.3 и 3.8). Коаксиальные кабельные линии используются не только для телефонирования, но и для других связей в полосе частот до 1 МГц и выше; полоса частот от 1 МГц обычно применяется для телевидения, хотя может быть использована и для организации телефонных каналов. Коаксиальные кабели обозначаются СС (Coaxial Cable). Конструкция коаксиального кабеля такова: полый цилиндр
обычно из цветного металла (медь, алюминий) содержит внутри себя сплошной цилиндрический провод обычно из меди, который центрируется внутри полого цилиндра с помощью изоляционного материала. Если считать, что на один телефонный канал требуется полоса частот порядка 4 кГц, то число телефонных каналов в полосе частот до 1 МГц будет примерно равно 240, а в полосе частот до 10 МГц — 2500. Таким образом, телефонная связь и телевидение по коаксиальным кабелям осуществляются не только в области ДВ и СВ, но и в области КВ (высшая частота 10 МГц соответствует длине волны примерно 30 м).
При многократном телефонирование по проводам промежуточные усилительные пункты устанавливаются на расстоянии друг от друга примерно 300 км (воздушные цепи), 40 км (кабельные симметричные цепи) или 20 км (коаксиальные цепи).
Для передачи информации на большие расстояния используются беспроводные радиоканалы. Границы диапазонов волн показаны на рис. 3.3.
Каждый из диапазонов имеет ряд особенностей распространения. Радиоволны всех диапазонов, кроме радиоволн короче 3 ... 5 м, отражаются ионосферой, что обусловливает возможность передачи сигналов на очень большие расстояния, в сотни и тысячи раз превышающие дальность прямой видимости. Наиболее эффективно (при сравнительно небольших потерях энергии на поглощение) от ионосферы отражаются короткие радиоволны. При распространении радиоволн вблизи земной поверхности происходит их поглощение, растущее с укорочением длины волны, поэтому наибольшая дальность радиосвязи может быть получена (при прочих равных условиях) на длинных волнах. На распространение ультракоротких радиоволн большое влияние оказывает состояние тропосферы, в которой происходят преломление, рассеяние и поглощение радиоволн. Последнее прежде всего относится к сантиметровым и миллиметровым волнам.
В радиосвязи низкие (тональные) частоты не используются; иногда применяются лишь очень длинные волны, порядка 10 000 м (30 кГц). Чаще всего беспроводная связь осуществляется на СВ и КВ порядка 1000... 100 000 кГц (300 ... 3 м) и в области дециметровых волн (частоты от 300 МГц до 3 ГГц).
3.14. Комбинированная проводно-беспроводная электросвязь
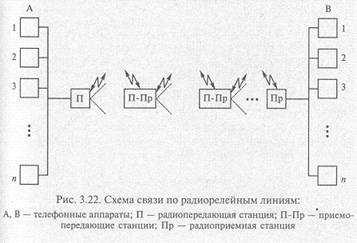
Направленное излучение энергии имеет решающее значение в случае организации многократной связи с помощью радиорелейных линий связи (РЛС) (см. под разд. 3.3). По такой линии можно передать относительно широкий спектр частот, включающий сотни полос, соответствующих телефонному спектру частот, и осуществить сотни телефонных разговоров одновременно. Это обусловлено тем, что несущая частота весьма высока (порядка нескольких гигагерц) и боковые полосы частот порядка 3...4 МГц, возникающие при модуляции, содержат крайние частоты, мало отличающиеся в процентном отношении от несущей частоты. Но в полосе частот 4 МГц укладывается 1000 телефонных каналов по 4 кГц. Схема связи по радиорелейным линиям показана на рис. 3.22.
Законы распространения дециметровых волн аналогичны законам распространения световых волн, поэтому расстояние между передающей и приемной станциями определяется прямой видимостью, т.е. составляет 50 ... 60 км. На таком расстоянии друг от друга устанавливают приемопередающие станции подобно усилителям в проводной связи.
Для организации многократной связи по РЛС может быть использована примерно такая же аппаратура, какая применяется для многократной телефонной связи по проводам. Нетрудно заметить, что вместо сотен телефонных передач можно организовать по РЛС передачу телевизионной программы, требующей примерно такого же спектра частот.
РЛС работают в УКВ-диапазоне, что позволяет передавать сообщения, занимающие весьма широкую полосу частот (например, передавать одновременно сотни телефонных разговоров). Связь на УКВ устойчива и практически не зависит от времени года и суток, промышленные и атмосферные помехи в этом диапазоне ослаблены. Антенные устройства в УКВ-диапазоне получаются компактными и обладают большой направленностью. По количеству
и качеству одновременно передаваемых сообщений РЛС превосходят все другие виды линий связи, в том числе коаксиальные кабельные линии. Для увеличения пропускной способности на одной линии применяют несколько высокочастотных стволов, каждый из которых образуется цепочкой приемопередающей радиоаппаратуры и представляет собой, по существу, самостоятельную РЛС. Стволы работают на разных близких волнах на общие антенны, к которым они подключаются через разделительные электрические фильтры. Для многократного (многоканального) использования каждого ствола применяется аппаратура уплотнения, что позволяет по каждому стволу передавать 600... 1000 одновременных телефонных разговоров или высококачественную программу телевидения.
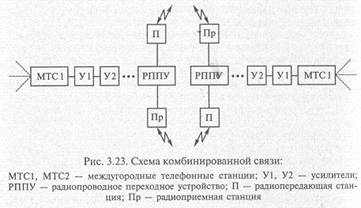
Как было указано в под разд. 3.4, во многих случаях нельзя обойтись только проводной или радиосвязью (связь с движущимися объектами или связь через моря и океаны). В этих случаях комбинируют указанные виды дальней связи. Схема комбинированной дальней проводной и дальней радиосвязи приведена на рис. 3.23. Пунктирными линиями, исходящими из МТС1 и МТС2, показаны проводные цепи, соединяющие телефонные аппараты городских абонентов с МТС.
По такой же схеме городские абоненты могут быть связаны и с самолетом, поездом, пароходом, на которых установлены передающие и приемные радиостанции.
ГЛАВА. 4.ЦИФРОВЫЕ КАНАЛЫ ПЕРЕДАЧИ ДАННЫХ
4.1. Причины перевода сетей на цифровую технологию
Первоначально для целей телефонии, радиовещания и телевидения были созданы аналоговые каналы, по которым сообщения передавались в непрерывной — аналоговой — форме. С возникновением цифровых вычислительных машин, пришедших на смену аналоговым (первая отечественная цифровая Малая вычислительная машина МЭСМ была создана под руководством академика Лебедева в 1950 г.), появилась потребность передавать сообщения и в цифровой форме. В этой же форме вполне логично было передавать алфавитно-цифровые данные, тексты, например, предварительно пронумеровав в двоичной системе символы — цифры, буквы и знаки.
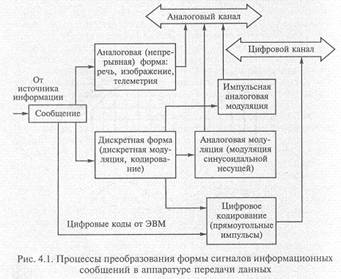
Информация, воплощенная и зафиксированная в некоторой материальной форме, называется сообщением, которое может быть непрерывным, т.е. аналоговым, или дискретным — кодированным (рис. 4.1). Передача аналоговых сигналов подробно рассмотрена в гл. 3. Аналоговые сигналы передаются по проводам и кабелям, но некоторые беспроводные сетевые технологии используют аналоговую радиопередачу. Для дискретного сообщения характерно наличие фиксированного набора элементов, из которых в некоторые моменты — дискреты времени — формируются различные последовательности цифр, соответствующие уровню обрабатываемой физической величины. Преобразование непрерывного сообщения в дискретное называется кодированием, или дискретной модуляцией, которая в свою очередь подразделяется на два вида — аналоговую модуляцию (или просто модуляцию), подробно рассмотренную в гл. 3, и цифровое кодирование. При цифровом кодировании информация представляется в виде последовательности прямоугольных импульсов. Для передаваемой текстовой информации тем более характерна цифровая форма.
Созданные ранее аналоговые каналы, рассмотренные в гл. 3, начиная с 70-х годов прошлого века стали использоваться для передачи информации и в дискретной форме. И цифровую, и аналоговую информацию можно передавать как по цифровым, так и по аналоговым каналам. При этом необходимо решать вопрос о соответствии ширины спектра сигнала и ширины полосы пропускания канала, чтобы избежать недопустимых искажений сигнала при прохождении его по линии связи.
При проектировании новых, в том числе и ведомственных, сетей связи предпочтение отдается цифровым методам связи, что объясняется следующими причинами..
возможностью цифровой передачи любых известных сигналов электросвязи;
возможностью контроля качества приема цифровых сигналов по единому показателю — характеристике цифровых ошибок, что позволяет выявить сигналы пониженного качества, требующие повторной передачи (для сигналов, допускающих пере запрос), и сигналы, требующие исправления без пере запроса (для сигналов в реальном масштабе времени) — см. гл. 6;
существенным упрощением эксплуатации цифровых средств и повышением показателей надежности каналов и трактов, что обусловлено как упрощением диагностики неисправностей, так и возможностью восстановления каналов и трактов;
возможностью использования для передачи цифровых сигналов любых широкополосных направляющих сред, в первую очередь оптических волокон и спутниковых каналов;
существенным упрощением цифровой аппаратуры передачи данных по сравнению с аналоговой, поскольку цифровые сигналы
можно более эффективно и гибко обрабатывать и передавать, чем аналоговые;
обеспечением конфиденциальности информационного обмена; переходом ведомственных сетей и сетей связи общего пользования развитых стран на цифровые средства передачи и коммутации с ориентацией в дальнейшем на цифровые сети интегрального обслуживания и, как результат, прекращением производства аналоговых средств связи.
4.2. Дискретная модуляция аналоговых сигналов
Сообщения об изменениях каких-либо физических непрерывных величин (например, в системах дистанционного управления, телеметрии), направляемые для обработки на цифровую ЭВМ, предварительно преобразовываются в дискретную форму. Такое преобразование сообщения из аналоговой формы (рис. 4.2, а) в дискретную (рис. 4.2, б) называется квантованием, или дискретизацией, теорию которой разработал академик В.А. Котельников.
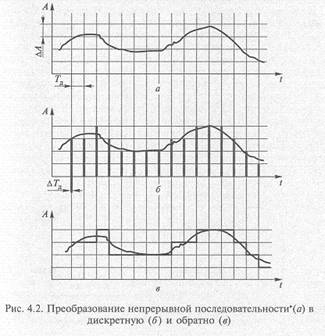
Для дискретных сообщений характерно наличие фиксированного набора элементов, называемых дискретами по уровню ∆А, из которых в некоторые моменты — дискеты по времени ∆Тд — формируются последовательности чисел, соответствующих уровням непрерывной величины. Такое преобразование сообщения из дискретной формы в цифровую называется оцифровкой.
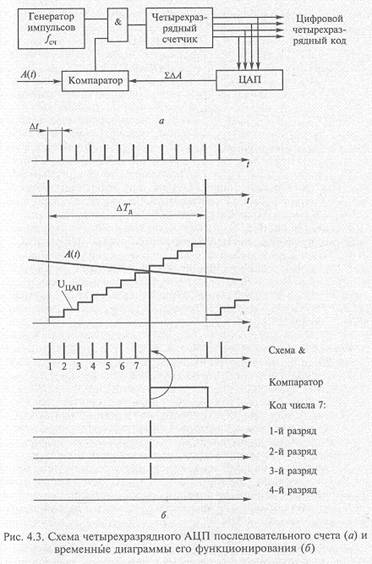
После проведенной дискретизации непрерывной функции в моменты времени, соответствующие очередному дискрету времени Тд амплитуде сигнала приписывается значение, равное числу дискретов (квантов) по уровню ∆А, содержащемуся в абсолютном значении амплитуды А. Число дискретов подсчитывается двоичным счетчиком, и в результате получается двоичный цифровой код значения амплитуды сигнала в момент времени очередного дискрета. Образующаяся последовательность цифровых кодов посылается в канал связи. Такая оцифровка производится в течение времени преобразования ∆Тд с помощью аналого-цифровых преобразователей (АЦП).
Схема простейшего АЦП последовательного счета приведена на рис. 4.3, а, временные диаграммы его функционирования — на рис. 4.3, б. Поступающие с генератора с частотой fсч импульсы подсчитываются и-разрядным (в данном случае — четырехразрядным) счетчиком. Одновременно с этой же частотой цифро-аналоговый преобразователь (ЦАП) вырабатывает дискреты по уровню ∆А, которые подаются (подобно гирькам на чашу весов) на один из входов компаратора. На другой вход компаратора подается входное аналоговое напряжение, которое необходимо преобразовать в цифровую форму. Компаратор сравнивает два напряжения и вырабатывает сигнал в момент равенства их значений. При достижении суммой дискретов ∆А значения аналогового напряжения компаратор срабатывает, его сигнал прерывает поступление счетных импульсов на счетчик, счет останавливается и на счетчике оказывается зафиксированным n-разрядный двоичный цифровой код, соответствующий значению аналоговой величины на данном периоде квантования. Размеры квантов по времени и по уровню определяют погрешность преобразования. К ней добавляются погрешности, вызываемые разбросом параметров и деградацией элементов схемы, нестабильностью источника опорного питания ЦАП и климатических условий. По этим причинам наиболее качественные АЦП позволяют получить лишь двадцатиразрядный цифровой код.
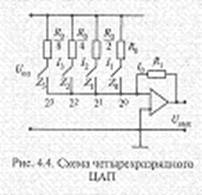
В системах дистанционного управления и в АСУ полученный по линии связи цифровой код должен быть преобразован в аналоговую форму, для чего он подается на ЦАП. Простейшая схема ЦАП (рис. 4.4) представляет собой матрицу весовых сопротивлений Ri, подключаемых с помощью управляемых разрядами кода ключей Zi к источнику опорного питания Uоп в той или иной комбинации,
соответствующей значению кода. Полученное напряжение через операционный усилитель подается на выход. Восстановленная таким образом непрерывная последовательность будет иметь форму, отличающуюся от исходной в допустимых пределах
(рис. 4.2, в). Подобный ЦАП, как уже говорилось, входит и в состав АЦП (см. рис. 4.3, а), в котором он вырабатывает ступенчатое напряжение UЦАП (см. рис. 4.3, б), представляющее собой нарастающую сумму дискретов (квантов) по уровню ∆А.
Теперь рассмотрим вопрос о том, какова должна быть частота рис. 4.4. Схема четырехразрядного повторения выборок, т.е. часто ЦАП та дискретизации, чтобы обеспечить заданную точность оцифровки. Ответ дает теорема Котельникова: для того чтобы точно воспроизвести непрерывную временную последовательность по ее выборкам (по дискретной временной последовательности), частота дискретизации 1/Тд должна более чем вдвое превышать наивысшую частоту fmax в этой непрерывной последовательности, т.е. Тд≤ 1/2fmax.
Наивысшая частота — это частота nf гармонической составляющей ряда Фурье с максимальным номером nmax, в который может быть разложена импульсная последовательность, полученная преобразованием исходной непрерывной последовательности после дискретизации (см. рис. 4.2, 6).
На практике учитываются гармонические составляющие с первой по пятую. При выполнении условия этой теоремы погрешность преобразования на этапе квантования по времени отсутствует. Процесс квантования по уровню всегда связан с внесением некоторой погрешности εi, значение которой определяется неравенством — ∆А/2 ≤εi ≤ ∆А/2. Погрешность εi, называемая шумом квантования, однозначно определяется числом допустимых значений преобразуемой непрерывной функции А, т.е. разрядностью используемого цифрового кода. Следовательно, погрешность аналого-цифрового преобразования, обусловленная шумом квантования, при увеличении разрядности выходного кода может быть уменьшена до сколь угодно малой величины. Но в отличие от погрешности дискретизации по времени она принципиально присуща данному алгоритму и не может быть сведена к нулю выбором параметров устройства.
Рассмотренные погрешности обусловлены самим алгоритмом аналого-цифрового преобразования. Кроме них в реальных АЦП возникают погрешности, связанные с не идеальностью используемой элементной базы, т.е. инструментальные погрешности.
Разработаны разнообразные схемы АЦП и ЦАП, отличающиеся по функциональному составу и характеристикам. Такое многообразие устройств является следствием различия требований,
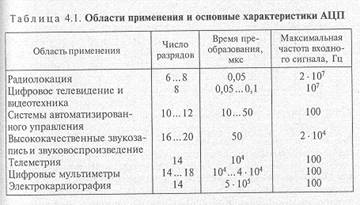
предъявляемых к преобразователям конкретными условиями их применения, которые не могут быть удовлетворены единым универсальным техническим решением. В табл. 4.1 перечислены ряд областей применения АЦП и требования, предъявляемые к ним реальными условиями работы.
Оцифровывание голоса осуществляется аппаратурой выделенных цифровых линий технологии плезиохронной цифровой иерархии (ПЦИ, другое обозначение — PDH от Plesiochronic Digital Hierarchy; plesio — почти, т.е. почти синхронная). Аппаратура PDH оцифровывает голос с частотой 8 кГц и кодирует его с помощью импульсно-кодовой модуляции — PCM (Pulse Code Modulation), образуя цифровой поток данных 64 Кбит/с.
4.3. Спектры последовательностей цифровых сигналов
Сравним спектры цифровых сигналов с рассмотренными в гл. 3 спектрами аналоговых сигналов.
Информация в цифровой форме как входная для ЭВМ, так и после обработки, т.е. выходная от ЭВМ, передается по каналам связи. При цифровом кодировании передаваемых данных, когда двоичные коды представляются в форме последовательности прямоугольных импульсов, спектр результирующего импульсного сигнала получается гораздо шире, чем при применении аналоговой модуляции. Это не удивительно, если вспомнить, что описываемый функцией Бесселя спектр идеального импульса, имеющего бесконечно большую амплитуду и бесконечно малую длительность, имеет бесконечную ширину (рис. 4.5).
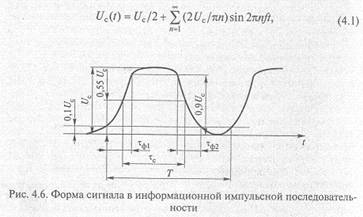
Цифровые сигналы — прямоугольные импульсы идеальной формы, проходя по линиям связи, искажаются, и, в лучшем случае,
чае, принимают трапециевидную форму (рис. 4.6). Сигналы характеризуются амплитудой Uс длительностью τс периодом повторения Т, длительностью переднего и заднего фронтов τф1 и τф2. Скважность следования импульсных сигналов Qс = Т/ τс при постоянстве длительности импульса может меняться в зависимости от частоты следования сигналов. Скважность тактовых импульсов и импульсов в цепях синхронизации обычно является постоянной величиной. Скважность последовательности информационных сигналов обычно равна 10. У сигналов, показанных на рис. 4.6 и 4.7, скважность равна 2, так как Т= 2τс; последовательность этих сигналов (импульсов) есть периодическая функция времени. Периодическую функцию, если она имеет на протяжении периода конечное число экстремальных значений, т.е. если выполняется условие Дирихле, можно представить в виде ряда Фурье. Ее можно выразить с достаточной степенью приближенности в виде суммы постоянной составляющей Uс/2 и нечетных гармонических составляющих — простых синусоидальных колебаний электрического напряжения, отличающихся по частоте и амплитуде:
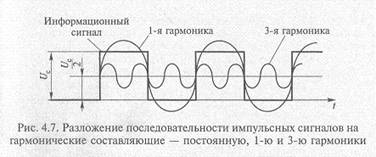
где f= 1/Т; n — нечетные целые числа. Из рис. 4.7 и формулы (4.1) видно, что основная энергия импульса S2 сосредоточена в низкочастотной части спектра (гармоники первая — F, третья — 3F, пятая — 5F), так как амплитуда каждой составляющей уменьшается пропорционально ее частоте.
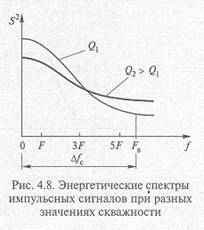
В случае когда Qс > 2, импульсную последовательность также можно представить в виде суммы синусоидальных составляющих, но выражение (4.1) при этом сильно усложняется, соотношения между гармониками изменяются. Доля высокочастотных гармоник увеличивается, и энергетический спектр сигналов с увеличением скважности расширяется (рис. 4.8).
В том случае, когда нас не интересуют детали переходного процесса в течение короткого времени действия импульсов τс следующих через длительные интервалы периодов повторения T» τс («одиночные импульсы»), может применяться дискретный метод анализа с использованием математического аппарата решетчатых функций. Спектр составляющих таких сигналов весьма широк, его активная ширина ∆fc » 1/Т. Удовлетворительный результат качественного спектрального разложения импульсных сигналов получается в случае, если активная ширина спектра импульса определяется тем диапазоном частот от f= 0 до некоторой верхней частоты Fв (численно равной ∆fc), в котором сосредоточено 95% полной энергии импульса.
Значения активной ширины спектра импульсов некоторых форм, вычисленные по указанному выше критерию, приведены в табл. 4.2. С целью упрощения принято равенство длительностей переднего и заднего фронтов: τф1 = τф2 = τф. При заданной
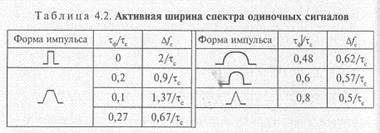
длительности импульса τс активная ширина спектра может быть выбрана из этой таблицы.
Если τф/ τс > 0,2, то с достаточной степенью точности можно считать, что ∆fc = (0,2...0,4)/τф.
Из табл. 4.2 видно, что сигнал с большей крутизной переднего фронта характеризуется наличием в спектре более высокочастотных составляющих, так как активная ширина его спектра больше. Таким образом, полоса пропускания канала может оказаться недостаточной для неискаженной передачи одной последовательности импульсов, имеющих определенные форму, длительность, амплитуду и скважность, и достаточной для другой последовательности. Цифровые сигналы по сравнению с аналоговыми требуют более широкой полосы пропускания канала передачи. Но для реализации прямоугольных и подобных им импульсов требуется менее сложная и менее дорогостоящая аппаратура, чем для реализации синусоидальных импульсов.
В цифровых каналах принятого в Европе стандарта DVB [это набор спецификаций, охватывающий кабельное DVB-С (cable), спутниковое DVB-S (sattelite) и наземное DVB-Т (terrestrial) цифровое телевизионное вещание применяется модуляция COFDM (Coded Orthogonal Frequensy-Division Multiplexing). Это вариант мультиплексирования посредством ортогональных несущих с предварительным кодированием сигнала. При применении модуляции OFDM весь диапазон канала вещания (в Европе он составляет 8 МГц) разбит на множество ортогональных под несущих. Ортогональность означает, что усредненное по времени произведение двух несущих равно нулю. Частоты под несущих
![]()
где f0 — нижняя частота диапазона; n — номер под несущей (при n = 0 число под несущих N= 1); τ — временной интервал передачи одного символа. Поток данных разбивается на N субпотоков, несущая каждого из которых модулируется с гораздо меньшей скоростью. Разнос несущих по частоте — 1/τ.
В соответствии с DVB в одном ТВ-канале шириной 8 МГц может быть до 8000 несущих, реально же задействовано 1705 (режим 2K COFDM или 6817 (режим 8К) несущих. Каждая несущая модулируется посредством 16 и 64-позиционной квадратурной амплитудной модуляции КАМ (подобная КАМ применяется в аналоговых каналах — см. под разд. 3.10). Следовательно, на каждой несущей один модуляционный символ определяет от двух до шести бит.
В соответствии с числом уровней модуляции исходный поток данных разбивается на n субпотоков — по числу бит в модуляционном символе. Для 16-КАМ таких субпотоков четыре. Демультиплексирование происходит побитно. Например, при модуляции 64-КАМ (n = 6) первый бит попадает в первый субпоток, шестой — в шестой, седьмой — снова в первый и т.д. На одной несущей OFDM передается один символ, поэтому в режиме 8К одновременно транслируются 48 групп по 126 символов на 48 126 = 6048 информационных несущих, а в режиме 2К — 12 групп по 126 символов на 1512 несущих. Одновременно передаваемые КАМ символы входят в OFDM-символ. Они распределяются по субканалам OFDM не последовательно, а перемежевываются по определенному закону. Поэтому, если OFDM-символ пропадает, его данные можно восстановить, поскольку биты одного кодированного пакета оказываются распределенными по многим, OFDM символам. Очевидно, что реализовать метод передачи OFDM «в лоб», т.е. использовать несколько тысяч генераторов модулируемых поднесущих, весьма проблематично, а на приемной стороне это и вовсе неразрешимая задача. Однако современные методы цифровой обработки сигнала позволяют существенно упростить ее решение за счет использования отработанных алгоритмов прямого и обратного быстрого преобразования Фурье (БПФ и ОБПФ). Рассмотрим, как это происходит, на примере векторной диаграммы модуляции 16-КАМ (рис. 4.9) при передаче в DVB-Т. Каждая из 16 точек на этой диаграмме соответствует четырем битам символа и определяет амплитуды синфазного колебания (I, ось абсцисс) и квадратурного колебания (Q, ось ординат). Складываясь, эти колебания задают соответствующий OFDM-символу сигнал. Если принять математический аппарат комплексных чисел, ось квадратурных амплитуд будет

соответствовать оси мнимых чисел (Im), ось синфазных амплитуд — оси действительных чисел (Re). Тогда любой символ можно представить как комплексное число z = Ai + АQ, или по формуле Эйлера z = Aexp(jφ).
В DVB используют не
сами z, а их значения, нормированные на среднюю амплитуду суммарного колебания
при выбранном виде модуляции. При модуляции 16-КАМ. Аmax = 3![]() .
.
Запишем в комплексном виде модулированный символом Сk(t) сигнал на k-й несущей без ее переноса в диапазон вещания:
![]()
С учетом того, что сигнал изменяется дискретно, т.е. t = nТ, где Т — длительность дискретного интервала (или интервала дискретизации); n — номер отсчета, получим
![]()
Тогда общий сигнал OFDM-символа
![]()
Математически вычисление энергии сигнала на k-й несущей аналогично вычислению дискретных значений функции по дискретным значениям амплитуд С» ее гармонических составляющих с частотами k/τ. Данную процедуру описывает ОБПФ
![]()
где N — число гармонических составляющих, в нашем примере— число несущих. Если длительность интервала дискретизации Т выразить как τ/N, выражение (4.2) станет аналогично ОБПФ (4.3). Алгоритмы как прямого, так и обратного БПФ и их аппаратная реализация достаточно хорошо проработаны. Они наиболее эффективны при N вида 2m . Поэтому в режиме 8К COFDM число: несущих условно принято равным 213 = 8192, просто не все из них используются. Параметр 1/Т= N/τ — это так называемая системная тактовая частота; для полосы канала в 8 МГц она равна 64/7 МГц. При переходе к другому частотному плану, например с полосой ТВ-канала 7 или 6 МГц, достаточно изменить системную тактовую частоту, сохранив неизменной всю структуру обработки сигнала, а вместе с ней и основные функциональные устройства. Системная тактовая частота одинакова в режимах 2К и 8К, т.е. от числа несущих скорость передачи напрямую не зависит, изменяется только ее надежность.
Таким образом, посредством ОБПФ из входного массива модуляционных символов численно формируется выходной OFDM символ. Временной интервал его передачи складывается из собственно времени передачи символа т и защитного интервала длительностью до τ/4, в течение которого повторно передается часть символа. Кроме 6048 информационных субканалов (в режиме 8К) он включает еще плотные сигналы, а также сведения о параметрах передачи, т.е. всего 6817 модулированных несущих. Плотные сигналы — это фиксированные псевдослучайные последовательности с точно известными значениями фаз и амплитуд сигналов. Часть пилотных сигналов (непрерывные сигналы) передается на фиксированных несущих в каждом OFDM-символе, другая часть (распределенные сигналы) случайным образом в произвольные моменты времени распределяется по спектральному диапазону передачи. Плотные сигналы предназначаются для синхронизации и оценки параметров канала передачи.
Синтезировать в передатчике OFDM-символы недостаточно, необходимо еще сформировать радиосигнал в заданной частотной области с нижней частотой f0. Перенос символа в необходимый диапазон — это его смещение на частоту f0, что в комплексной форме эквивалентно умножению на комплексное (в виде квадратурных слагаемых) представление несущей f0. При этом амплитуды перемножаются, а аргументы складываются. Выделяя действительную (синфазную) и мнимую (квадратурную) составляющие S(n) и умножая их соответственно на cos(2πf0t) и sin(2πf0t), после суммирования получают полный сигнал одного OFDM-символа.
Гораздо сложнее, чем синтез сигнала в передатчике, осуществляются его прием, демультиплексирование и декодирование. Поэтому цифровой ТВ-приемник — достаточно сложный программно-аппаратный комплекс, и только достижения последних лет в области микросхем нано-технологий позволяют его делать недорогим при массовом выпуске.
4.4. Цифровое кодирование дискретной информации
Способ представления дискретной информации в виде сигналов, подаваемых на линию связи, называется физическим, или линейным, кодированием. На пропускную способность линии связи оказывает влияние не только физическое, но и логическое кодирование, которое осуществляется до физического. В процессе логического кодирования исходные биты заменяются новой последовательностью бит, несущей ту же информацию. Это кодирование придает новые дополнительные свойства кодовым посылкам, например возможность обнаруживать и исправлять ошибки в принятых данных (этим вопросам посвящена гл. 6).
В цифровых линиях связи передаваемые сигналы в форме прямоугольных импульсов имеют конечное число состояний, обычно два-три иногда четыре. Такими сигналами кодируются компьютерные данные, оцифрованная речь и изображения. Обычно за . один такт работы передающей аппаратуры каналов передается один элементарный сигнал — 1 бит. Промежуточная аппаратура каналов улучшает форму импульсов и восстанавливает длительность периода их следования. Она также осуществляет уплотнение низкоскоростных каналов абонентов в общий высокоскоростной канал, работая по принципу их разделения во времени, или так называемого временного мультиплексирования каналов TDM (от Типе Division Multi plexing), когда каждому низкоскоростному каналу выделяется определенная доля времени (квант, или таймслот) высокоскоростного канала. В сети Gigabit Ethernet за один такт передается больше 1 бит благодаря применению кода PAM5.
Рис. 4.10 иллюстрирует способ кодирования, называемый биполярным импульсным кодированием: положительное напряжение— логический О, отрицательное — логическая 1. Каждый импульс длится половину такта. Такой код обладает отличными само синхронизирующими свойствами, но при передаче длинных последовательностей нулей или единиц в линии связи возникает постоянная составляющая сигналов. Кроме того, спектр у этого кода значительно шире, чем у потенциальных кодов, приведенных далее на рис. 4.11 — 4.13. Так, при передаче всех нулей или всех единиц частота основной гармоники, Гц, будет численно равна скорости передачи дискретных данных N, бит/с вдвое выше основной гармоники потенциального кода NRZ. Из-за слишком широкого спектра биполярный импульсный код используется редко.
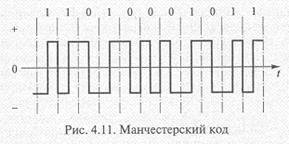
Поскольку большинство информационных сетей используют: узкополосную среду передачи, которая разрешает единовременную посылку только одного сигнала, то в таких сетях применяется способ кодирования, имеющий свойство самосинхронизации (selftiming). Один из видов самосинхронизирующихся кодов — манчестерский код, применяемый в сетях Ethernet: уровень сигнала изменяется по центру каждого бита, что позволяет принимающей ВС точно отметить границы бита (см. рис. 4.11). Логические 0 и 1 определяются, исходя из направления изменения полярности: нулю соответствует переход от положительного значения к отрицательному, единице — от отрицательного к положительному.

В сетях Token Ring применяется разностное манчестерское копирование: уровень сигнала изменяется также по центру бита, но направление перехода не имеет значения, его наличие требуется только для синхронизации сигнала (см. рис. 4.12). Значение же логического сигнала определяется по наличию или отсутствию перехода в начале следования бита: нулю соответствует смена полярности, единице — отсутствие смены. Смена полярности в середине бита во внимание не принимается.
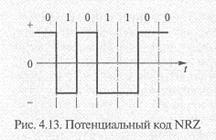
Кодирование без возврата к нулю более эффективно, чем манчестерское и разностное манчестерское кодирование, — NRZ (Non-Return to Zero) за счет простоты реализации и большей помехозащищенности. Преимуществом этого кода (см. рис. 4.13) является то, что частота основной гармоники спектра сигналов достаточно низка и равна N/2. У сигналов, закодированных другими методами, например манчестерским кодом, основная гармоника имеет более высокую частоту.
Недостатком кода NRZ является отсутствие самосинхронизации, поэтому при высоких скоростях обмена данный код не применяется. Другой недостаток проявляется при передаче длинных последовательностей 1 и 0. В этом случае низкочастотная составляющая приближается к нулю, поэтому в каналах, где нет непосредственного гальванического соединения между источником и приемником информации, код NRZ также не применяется. Однако разработаны модификации метода NRZ-кодирования, устраняющие указанные два недостатка.
Синхронизация цифровых сетей — основа их нормальной работы. При восстановлении сигнала важна не только его форма, но и

момент его детектирования приемником. Поэтому «часы» на любом из узлов транспортной сети, разнесенных порой на тысячи километров, должны работать синхронно, с точностью до пикосекунды. В цифровых каналах иерархической многоуровневой сети с импульсно-кодовой модуляцией, использующих ПЦИ (PDH) и СЦИ (SDH) (см. под разд. 4.8), основной вид синхронизации — тактовая. Она определяет остальные виды синхронизации — по фреймам, по мультифреймам. Проблемы возникают, когда несколько простых ЛВС, каждая со своим источником тактовой сетевой синхронизации (ТСС), объединяются в сложную сеть передачи. В соответствии с руководящими материалами все системы ТСС классифицируются на четыре типа по интенсивности слипов — срывов тактовой частоты или по частоте проскальзывание в единицу времени. Типы ТСС: синхронный — слипов фактически нет; псевдосинхронный допускается один слип в течение 70 дней; плезиохронный — один слип за 17 ч и асинхронный — один слип за 7 с.
В иерархической многоуровневой системе первичный эталонный генератор тактовых импульсов (ПЭГ) располагается в первом уровне иерархии. Его сигналы распределяются по всем синхронизируемым элементам дерева сети синхронизации до второго уровня иерархии, где они управляют вторичными задающими генераторами, которые в свою очередь управляют локальными источниками синхронизации третьего уровня иерархии (см. приложение 12). Эта схема управления часто называется схемой типа «ведущий-ведомый» («master-slave»).
ПЭГ строятся на основе хронирующих атомных источников тактовых импульсов (водородный или цезиевый эталон) с точностью поддержания частоты не хуже 10-13...10-12. Сигналы ПЭГ, а также генераторов нижних уровней иерархии распространяются аппаратурой распределения сигнала синхронизации АРСС/SDU, обеспечивающей на практике от 16 до 520 интерфейсных выходов сигналов ТСС, которые по наземным линиям связи передаются для управления вторичными задающими генераторами (BЗГ ).
4.5. Цифровые модемы
В рассмотренных в гл. 3 аналоговых методах модуляции взаимосвязь между шириной полосы канала и отношением сигнал/шум не так благоприятна, как в уравнении Шеннона (2.1). Только импульсно-кодовые методы модуляции, при которых информация представляется посредством кода из конечного числа символов, соответствующих конечному числу возможных значений информации в момент дискретизации, обеспечивают взаимосвязь между шириной полосы и отношением сигнал/шум в соответствии с уравнением (2.1). При этом ширина полосы частот уже существующих аналоговых каналов и создаваемых в последнее время цифровых каналов должна быть достаточна для передачи импульсно модулированных цифровых сообщений.
Импульсное представление информации применялось с первых шагов электрической связи: телеграфные сообщения с самого начала представлялись в дискретной форме, так как в телеграфии использовалось кодирование — точки и тире в азбуке Морзе, телеграфный импульсный код Бодо.
Для передачи импульсов цифровых кодов по линиям связи глобальных сетей так же, как и при передаче аналоговой информации, применяется модуляция несущей частоты. Модуляция и демодуляция осуществляются цифровыми модемами, входящими в состав аппаратуры передачи данных. Цифровые модемы было бы правильнее называть сетевыми адаптерами, так как классической модуляции-демодуляции несущей частоты, как в аналоговых модемах, они не осуществляют.
Входные и выходные сигналы цифровых модемов представляют собой последовательности импульсных сигналов. Модемы не только кодируют и декодируют сообщения, но и синхронизируют передачу сигналов по линиям связи, проверяют правильность принятой информации, выполняют некоторые другие операции. На каждый вид передающей среды — коаксиальный кабель, витая пара, волоконно-оптический кабель — рассчитаны свои типы модемов, так как каждый вид линии обладает своими электрическими параметрами. В соответствии с этим выпускаются кабельные, сотовые (для работы в линиях сотовой телефонной связи), волоконно-оптические модемы, спутниковые радиомодемы для приема данных через спутниковую антенну. Для работы в сетях через систему электропитания компьютеров разрабатываются силовые модемы.
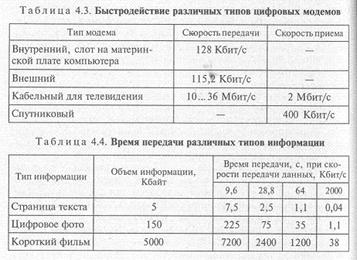
Быстродействие модема (табл. 4.3) влияет на временные затраты на передачу сообщений, что видно из табл. 4.4.
Модемы для организации дуплексного режима работы на двух проводной линии применяют технику частотного разделения каналов FDM (см. под разд. 3.1, 3.6). Они используют две частоты для кодирования нулей и единиц в одном направлении и другие две частоты для кодирования данных, предаваемых в обратном направлении. Этим технология FDM отличается от технологии временного разделения каналов TDM (Time Division Multiple).
При цифровом кодировании дуплексный режим на двухпроводной линии организуется с помощью техники разделения канала
во времени. Разные части тайм-слотов используются для передачи поочередно в обоих направлениях. Такой способ, иногда, называемый «пинг-понговой» передачей, применяется на абонентских двухпроводных окончаниях в цифровых сетях ISDN. В локальных сетях вместо модема возможно использование сетевых адаптеров (сетевых карт), выполненных в виде плат расширения, устанавливаемых на материнской плате. Имеются адаптеры для клиентских компьютеров и адаптеры для серверов. Основные технические характеристики сетевых карт: разрядность (8, 16,, 32 и 64-битные); скорость передачи (10... 1000 Мбит/с); тип подключаемого кабеля; поддерживаемые стандарты передачи данных . (Ethernet, Token Ring и др.).
Для передачи по цифровым каналам аналогового сообщения в виде непрерывной последовательности данных (телеметрических, метеорологических, данных систем контроля и управления) ее предварительно оцифровывают (см. под разд. 4.2). Частота оцифровки обычно составляет около 8 кГц, через каждые 125 мкс значение аналогового сигнала отображается 8-разрядным двоичным кодом. Таким образом, скорость передачи данных равняется 64 Убит/с. Объединение нескольких базовых цифровых каналов в один — мультиплексирование — позволяет создавать более скоростные каналы. Простейший мультиплексированный канал обеспечивает скорость передачи 128 Кбит/с, более сложные каналы, например мультиплексирующие 32 базовых канала, обеспечивают пропускную способность 2048 Мбит/с. С помощью цифровых каналов к магистралям подключаются также офисные цифровые АТС.
Цифровые абонентские каналы в режиме коммутации каналов используются в сети ISDN — наиболее распространенной цифровой сети с интеграцией услуг. По популярности сеть ISDN уступает лишь аналоговой телефонной сети. Адресация в ISDN организована так же, как и в телефонной сети, поскольку сеть создавалась для объединения существующих телефонных сетей с появляющимися сетями передачи данных. Поэтому сети ISDN позволяют объединять разнообразные виды сетей (видео-, аудиопередачи данных, передачи текстов, компьютерных данных и т.п.) со скоростями передачи информации 64 Кбит/с, 128 Кбит/с, 2 Мбит/с и 155 Мбит/с на широкополосных каналах связи.
Заметим, что названием «ISDN» принято именовать и сеть, использующую технологию ISDN, и протокол, применяющий эту технологию.
Активно развиваются и другие типы цифровых систем, из которых следует отметить модификации технологии цифровых абонентских линий DSL (Digital Subscriber Line). Для них используется термин «последняя миля», или «золотая миля», означающий расстояние, отделяющее потребителя от поставщика услуг. HDSL (High Bit Rate DSL) — высокоскоростной вариант абонентской линии ISDN.
Конкуренцию ISDN и DSL могут составить цифровые магистрали с синхронно-цифровой иерархией SDN (Synchronous Digital Hierarchy). В системе SDN имеется иерархия скоростей передачи данных.
Вот значения этой скорости, Мбит/с, для некоторых разновидностей SDN:
![]()
Для магистралей SDN применяются волоконно-оптические линии связи и частично радиолинии.
Сравним узкополосную локальную сеть, в которой сетевая среда способна передавать только один сигнал в любой момент времени, с широкополосной сетью, где среда передает несколько сигналов одновременно, используя для каждого из них свою частоту передачи. Примером широкополосной сети является кабельное телевидение. Подключив к телевизору кабель, можно выбирать любой из множества транслируемых каналов. Для подключения большого числа телевизоров в доме устанавливается устройство разветвления кабеля, подведенного к дому. Узкополосная сеть использует импульсы, передаваемые непосредственно в сетевую среду, для создания простого сигнала, в котором в закодированной форме представлены двоичные (бинарные, цифровые) данные. Некоторые характеристики ЛВС приведены в приложении 13.
Узкополосные сети могут быть протянуты на меньшие расстояния, чем широкополосные, ввиду потерь мощности сигнала, связанных с электрическими помехами и другими факторами. Предельно допустимая длина отрезка кабеля узкополосной сети уменьшается пропорционально падению пропускной способности. Вот почему протоколы локальных вычислительных сетей, таких, как Ethernet, требуют строгого соблюдения правил монтажа этих сетей.
В высокоскоростных (широкополосных) кабельных сетях используются беспроводные радиоканалы, а также проводные линии связи — кабели различных типов. Наиболее распространенные типы кабелей: UTP, STP и СС, рассмотренные в под разд. 3.13. В последнее время получают распространение волоконно-оптические кабели FOC (Fiber Optic Cable).
4.7. Принципы организации интерфейсов
Под стандартным интерфейсом понимается совокупность унифицированных аппаратных, программных и конструктивных средств, необходимых для реализации взаимодействия различных функциональных элементов в ИВС при условиях, предписанных стандартом и направленных на обеспечение информационной, электрической и конструктивной совместимости указанных элементов (ГОСТ 23633 — 79, ISO, IEEE). Иногда вместо термина «интерфейс» используется понятие «стык» — место соединения устройств передачи сигналов данных и унифицированных систем связи, входящих в системы передачи данных. Таким образом, интерфейс физически представляет собой много контактное кабельное соединение (набор проводов и разъемов) с четко определенными функциями и параметрами сигналов, передаваемых по каждому проводу, а также набор правил обмена, называемый протоколом обмена.
Интерфейс можно рассматривать как результат унификации связей и устройств сопряжения составных элементов ИВС. При этом выполняется принцип взаимозаменяемости, основанный на способности устройств выполнять различные функции после установки и подключения без дополнительной конструкторской, доработки. Следствием унификации является взаимозаменяемость. Примером взаимозаменяемости может служить универсальная
интерфейсная карта (или программируемый интерфейс), являющаяся базой ряда устройств ввода — вывода.
Таким образом, интерфейс предназначен для унификации внутрисистемных и межсистемных связей и устройств сопряжения с целью эффективной реализации существующих и перспективных элементов ИВС.
Одна из основных функций интерфейса заключается в обеспечении информационной совместимости между элементами сети, а именно согласованности взаимодействий функциональных элементов в соответствии с совокупностью логических условий. Логические условия определяют структуру и состав унифицированного набора линий связи, набор процедур по реализации взаимодействия и последовательность их выполнения для различных режимов функционирования, способ кодирования и форматы данных, команд, адресной информации и информации состояния, временные соотношения между управляющими сигналами, ограничения на их форму и взаимодействие.
Условия информационной совместимости определяют объем и сложность схемотехнического оборудования и программного обеспечения, а также основные технико-экономические показатели— пропускную способность, надежность работы интерфейса и объем аппаратных затрат на устройства сопряжения.
Составными физическими элементами связей интерфейса являются электрические цепи, называемые линиями интерфейса. Вся совокупность линий называется магистралью. Можно выделить две магистрали: информационную и управления каналом. По информационной магистрали передаются коды данных, адресов, команд и состояний устройств. Аналогичные наименования присваиваются соответствующим шинам интерфейса. Коды состояния описывают состояния сопрягаемых устройств или формируются в ответ на действия команд. Широко используются такие коды состояний, как «Занятость абонента», «Наличие ошибки», «Готовность к приему или передаче информации» и др.
Магистраль управления информационным каналом делится на ряд шин. Шина управления обменом состоит из линий синхронизации передачи информации. В зависимости от принятого принципа обмена (асинхронного, синхронного) линий может быть от одной до трех.
Асинхронная передача происходит при условии подтверждения принимающим информацию устройством готовности к приему и завершается подтверждением о приеме данных. При синхронной передаче темп выдачи и приема данных задается регулярной последовательностью сигналов. Линии шины управления обменом выполняются, как правило, двунаправленными.
Шина передачи управления выполняет операции приоритетного занятия (захвата) магистрали информационного канала. Состав и конфигурация линий этой шины зависят от структуры управления интерфейсом. Различают децентрализованную и централизованную структуры управления. В интерфейсах, предназначенных для объединения только двух устройств (соединение типа «точка — точка»), эта шина отсутствует.
Шина прерывания применяется в основном в машинных интерфейсах мини и микро ЭВМ и программно-модульных систем. Основная ее функция — идентификация устройства, запрашивающего сеанс обмена информацией. Идентификация состоит в определении контроллером (процессором) исходной информации о запрашиваемом устройстве. В качестве информации об устройстве используется адрес источника прерывания текущей программы либо адрес программы обслуживания прерывания (вектор прерывания).
Шина специальных управляющих сигналов включает в себя линии, предназначенные для обеспечения работоспособности и повышения надежности устройства интерфейса. К этим линиям относятся линии питания, контроля источника питания, тактовых импульсов, защиты памяти, общего сброса, контроля информации и т.п.
В соответствии с ГОСТ 26.016 — 81 структуры связей интерфейсов подразделяют на магистральную, радиальную, цепочечную и смешанную (комбинированную).
Для обеспечения информационной совместимости интерфейс реализует ряд функций:
селекцию (выбор) информационного канала;
синхронизацию обмена информацией;
координацию взаимодействия;
буферное хранение информации;
преобразование формы представления информации.
Первые три функции выполняет канал управления, четвертую и пятую — информационный канал. Рассмотрим особенности реализации указанных функций в типовых интерфейсах, используемых в вычислительных сетях и локальных сетях массового применения.
Управление операциями селекции выполняется централизованно и децентрализованно. При централизованном управлении возможны несколько вариантов реализации селекции. На рис. 4.14, а приведена схема временной селекции магистралей на основе генерации тактов. Магистраль предоставляется каждому устройству — информационному блоку (ИБ) — через равные промежутки времени, определяемые скоростью работы генератора тактов. Моменты занятия магистрали определяются счетчиками, синхронно работающими в каждом из подключаемых устройств. Такое решение обеспечивает правило приоритетного обслуживания «первым пришел — последним обслуживается».
На рис. 4.14, б приведена схема пространственной селекции на основе последовательного адресного сканирования источников запроса. Выбор источника запроса начинается по общему сигналу запроса и выполняется последовательно кодовой адресацией всех подключаемых устройств в соответствии с принятым правилом обслуживания. При обнаружении источника запроса устанавливается сигнал «Занято» и дальнейшая выдача контроллером адресов прекращается. По окончании обслуживания данного запроса возобновляется поиск следующего источника. Достоинство этого варианта — гибкость в реализации правил обслуживания, недостаток — низкое быстродействие. Этот вариант широко применяется в стандартных интерфейсах (ГОСТ 26.003 — 80).
Схема последовательной (цепочечной) селекции показана на рис. 4.14, в. Такая селекция наиболее распространена в машинных интерфейсах как наиболее простая и достаточно быстродействующая. Поиск источника запроса начинается по сигналу «Запрос». Идентификация наиболее приоритетного устройства выполняется сигналом «Подтверждение», который последовательно проходит через все устройства. Приоритетным в данном случае будет устройство, наиболее близко расположенное к контроллеру. При поступлении сигнала «Подтверждение» в устройство — источник запроса — дальнейшее его прохождение блокируется и устройством выдается сигнал «Занято».
Отличие схемы селекции по выделенным линиям (рис. 4.14, г) заключается в том, что общие линии «Запрос» и «Подтверждение»
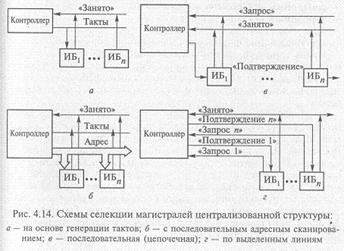
заменяются системой радиальных линий. Максимальное время занятия информационной магистрали при этой схеме меньше, чем при цепочечной структуре, так как сигналы по шинам запроса и подтверждения могут передаваться параллельно. Указанный вариант обладает также гибкостью установления дисциплины обслуживания, поскольку контроллер с помощью масок может устанавливать произвольные приоритет и порядок опроса. Однако это достигается за счет существенного увеличения числа линий и усложнения аппаратуры.
При децентрализованном управлении также имеются варианты реализации селекции. В схемах децентрализованной пространственной селекции наличествуют замкнутые линии запроса и подтверждения. Вариант, показанный на рис. 4.15, а, отличается отсутствием линии «Занято» и замыканием общей линии «Запрос» с линией «Подтверждение». Необходимым условием установления запроса любым устройством является отсутствие входного сигнала подтверждения. При выдаче запроса этот сигнал дизъюнктивно формируется на линии и трансформируется в сигнал «Подтверждение», который проходит до устройства, выставившего запрос и находящегося наиболее близко по отношению к участку замыкания.
В варианте децентрализованной кольцевой структуры (рис. 4.15, б) используется одна линия, определяющая состояние занятости информационного канала по циркуляции в линии маркерного
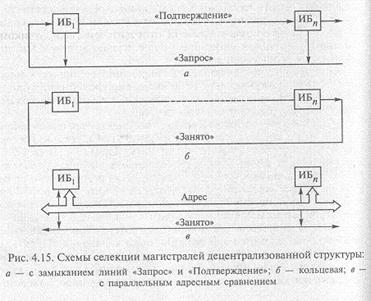
импульса или серии импульсов. Устройство, запрашивающее шину, не пропускает маркер к следующему устройству, в результате чего циркуляция импульсов прекращается. Эта структура широко распространена в интерфейсах локальных сетей. Достоинство кольцевой структуры — малое количество оборудования и линий связи, основной недостаток — низкая помехоустойчивость.
Параллельное адресное сравнение (рис. 4.15, в), или децентрализованное кодовое управление (ДКУ), является одним из перспективных способов селекции для магистральных систем сопряжения. Сущность алгоритма ДКУ заключается в параллельном выделении приоритетного кода запроса с помощью поразрядного сравнения кодов приоритета в асинхронном режиме одновременно во всех устройствах интерфейса, выставивших запросы.
Процессы передачи массива могут быть детерминированными и стохастическими. К детерминированным относятся процессы передачи массива слов фиксированной длины (от одного до нескольких тысяч слов за сеанс связи), к стохастическим — переменной длины. При детерминированных процессах используется синхронный способ сигнализации об окончании процесса взаимодействия, при стохастических — асинхронный. Синхронный способ применяется редко, в основном в интерфейсах, где фиксированная длина массива слов изменяется от 1 до 256 слов. Основное преимущество синхронного способа сигнализации — отсутствие в системе шин линии окончания сеанса связи.
Асинхронный способ сигнализации при передаче массива слов наиболее распространен. Сигналы синхронизации могут выдаваться в произвольный момент времени отправителем (передатчиком) по информационной шине или по специально выделенным линиям управляющего канала.
Интерфейсы разделяются на следующие основные классы (рис. 4.16): машинные, или системные; периферийные; мульти микропроцессорных систем; распределенных вычислительных систем; локальных и распределенных сетей.
Машинные интерфейсы предназначены для организации связей между составными компонентами ЭВМ и систем. В свою очередь они разделяются на три группы. Первая — интерфейсы ввода — вывода в (из) ЭВМ с разделенными информационными каналами к периферийному устройству (ПУ) и оперативному запоминающему устройству (ОЗУ), вторая — интерфейсы ЭВМ с объединенным информационным каналом к ПУ и ОЗУ. Такую архитектуру имеют некоторые классы персональных ЭВМ, мини и микро ЭВМ. К третьей группе относятся интерфейсы одноплатных ЭВМ с объединенным информационным каналом к ПУ и ОЗУ типа ОШ, ориентированные на внутри платное и внутрисхемное применение. Такие интерфейсы предназначены для организации сопряжения между составными компонентами микропроцессорных
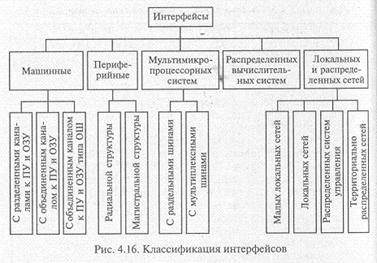
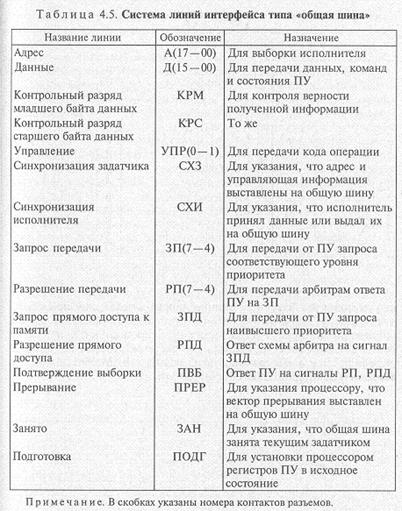
комплектов БИС и составных функциональных узлов СБИЛ мини-ЭВМ (ОШ) и микро ЭВМ (Q-шина или QBUS). На рис. 4.17 приведена структура интерфейса типа «общая шина», а в табл. 4.5— система линий интерфейса «общая шина». Общая шина широко используется как внешняя магистраль микро ЭВМ; ее прототипом явилась магистраль UNIBUS фирмы DEC.
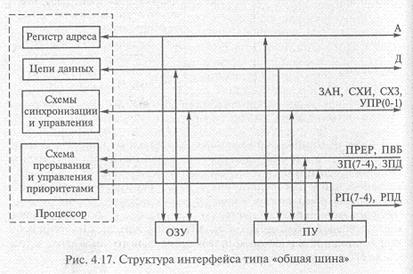
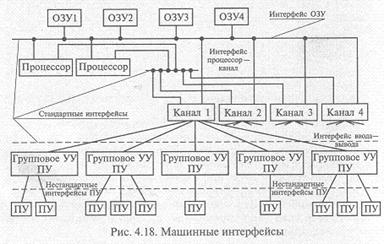
На рис. 4.18 приведена схема машинных интерфейсов. Интерфейс ОЗУ и интерфейс процессор — канал являются внутренними, стандартизируются в рамках одного семейства ЭВМ и обладают наибольшим быстродействием. Через них информация передается параллельно словами или словами двойной длины, иногда полусловами. Через интерфейс ввода — вывода информация чаще всего передается байтами. Стандартизация этих трех интерфейсов дает возможность расширения вычислительного комплекса, в том числе его модернизации.
Периферийные интерфейсы выполняют функции сопряжения с ПУ, измерительными приборами, исполнительными механизмами, аппаратурой передачи данных и внешними запоминающими устройствами (ВЗУ). Широкая номенклатура этих интерфейсов позволяет использовать разнообразную периферию. По функциональному назначению они делятся на интерфейсы радиальной и магистральной структур. Интерфейсы радиальной структуры обеспечивают схему сопряжения «точка — точка» и используются для сопряжения исполнительных механизмов ввода — вывода с контроллерами. К этим интерфейсам относятся системы сопряжения с параллельной передачей информации, предназначенные для подключения стандартной периферии, а также системы сопряжения для подключения устройств, размещенных на большом удалении друг от друга.
Интерфейсы магистральной структуры, обеспечивающие схему «многоточечного» подключения, используются как самостоятельно, так и в качестве системотехнического дополнения, расширяющего функциональные возможности ЭВМ на уровне связи с объектом управления. К ним относятся магистральные интерфейсы программно-модульных систем типа КАМАК. Они обеспечивают сопряжение программируемых контроллеров и ЭВМ с широким спектром цифровых измерительных приборов, преобразователей информации, генераторов, датчиков, пультов оператора.
Интерфейсы мульти микропроцессорных систем представляют собой магистральные системы сопряжения, ориентированные на объединение нескольких процессоров, модулей ОЗУ, контроллеров ВЗУ.
Интерфейсы распределенных вычислительных с и с т е м (ВС) предназначены для интеграции средств обработки информации, размещенных на значительном расстоянии. К ним можно отнести внутри блочные и процессорно-независимые системы сопряжения. Отличием их от интерфейсов типа ОШ является техническая реализация функций селекции и координации, что позволяет подключать к ним один или несколько процессоров, как обычные ПУ. Этот класс интерфейсов отличают высокая пропускная способность и минимальное время доступа процессора к общему ОЗУ.
Интерфейсы локальных и распределенных систем ориентированы на использование в системах различного функционального назначения. Обычно это системы сопряжения с бит последовательной передачей информации магистральной или кольцевой структуры. Интерфейсы этого класса в зависимости от назначения разделяют на группы интерфейсов малых локальных и локальных сетей (с длиной магистрали от десятков метров до нескольких километров), распределенных систем управления, территориально и географически распределенных сетей ЭВМ (с длиной линии более 10 км). На рис. 1.11 стрелками условно показаны межуровневые интерфейсные услуги ВС семиуровневой архитектуры (ГОСТ 23633 — 79). Две ВС объединяются между собой системой передачи данных.
Физический уровень —. это средства связи (канал связи, линия, кабель и др.).
Канальный уровень, или уровень звена данных, включает в себя функциональные и процедурные средства передачи, протоколы обмена сигналами. На сетевом уровне выполняются функции маршрутизации, адресации, организации виртуальных соединений, адресации пакетов. На транспортном уровне выполняются функции адресации оконечных абонентов, установки соответствия между адресами и сетевыми именами абонентов, доставки данных от системы-источника к системе-адресату. Сеансовый уровень содержит средства организации взаимодействий между прикладными процессами.
На представительном уровне, или уровне представления данных, выполняются функции преобразования синтаксиса и форматов данных, кодов изображений, графических и алфавитных данных, организации файлов, форматирование и компоновка данных.
На прикладном уровне выполняются прикладные процессы, обеспечивающие обработку информации. Назначение этого уровня — обеспечивать смысловое содержание (семантику) процессов.
По конструктивному исполнению интерфейсы можно разделить на четыре категории:
межблочные, обеспечивающие взаимодействие компонентов на уровне прибора, автономного устройства, блока, стойки, шкафа;
внутри блочные, обеспечивающие взаимодействие на уровне плат, субблоков;
внутри платные, обеспечивающие взаимосвязь между интегральными схемами (СИС, БИС, СВИС) на печатной плате;
внутри корпусные, обеспечивающие взаимодействие компонентов внутри интегральных схем.
Межблочное сопряжение выполняется с использованием следующих конструктивных средств: коаксиального и волоконно-оптического кабеля, многожильного плоского кабеля, многожильного кабеля на основе витой пары проводов.
Внутри блочное сопряжение печатных плат, субблоков выполняется печатным способом или накруткой витой пары проводов внутри блока, стойки, шкафа. Ряд интерфейсов может быть выполнен комбинацией внутри блочного и межблочного исполнений.
Внутри платное сопряжение реализуется печатным способом, внутри корпусное — методами микроэлектронной технологии.
Для реализации ввода — вывода данных в терминалах применяется оборудование DTE (Data Terminal Equipment), а также рассмотренная ранее аппаратура передачи данных — коммуникационное оборудование DCE (Distributed Computing Enviroment). Для подключения к передатчику сетевых устройств используется интерфейс AUI (Attachement Unit Interfase). Для передачи цветных телевизионных программ применяются видеостыки MII GBR и MII component standard (60 HZ).
Примеры интерфейсов: параллельный интерфейс Centronics для: подключения принтера; высокоскоростной интерфейс HSSI (High-speed Serial Interface) — протокол ЛВС; последовательный интерфейс RS-232С для подключения мыши, модема и др.
Интерфейс со стороны компьютера представляет собой контроллер периферийных устройств HSSI и программные средства; управления контроллером — драйвер. Наиболее распространенные последовательные интерфейсы периферийных устройств: RS. 232С, RS-422, RS-423. Технические характеристики этих интерфейсов приведены в приложении 14.
В основе интерфейсов RS-232С и RS-422 лежит однопроводная несогласованная линия, по которой информация передается двуполярными посылками со скоростью до 20 кБод при длине линии не более 15 м и до 300 кБод при длине не более 600 м.
Интерфейс RS-422 применяется также в симметричных дифференциальных линиях (витая пара, радиочастотный кабель), обладающих более высокими характеристиками, чем однопроводные линии.
Аппаратура для физической реализации внешнего последовательного интерфейса ПУ включает в себя собственно линию последовательной передачи информации (одиночный проводник, витая пара, радиочастотный кабель, волоконно-оптический кабель) и контроллеры устройств, предназначенные для управления обменом информацией, сопряжения с линией передачи, контроля за передачей информации и состоянием устройств, участвующих в обмене, и самоконтроля.
Системные интерфейсы или интерфейсы ЛВС, как правило многоуровневой архитектуры. На рис. 4.19, а показаны уровни системного интерфейса локальной сети iLNA фирмы Intel. Первый— физический уровень — реализуется аппаратно и состоит из последовательной линии связи и приемопередатчиков, передающих
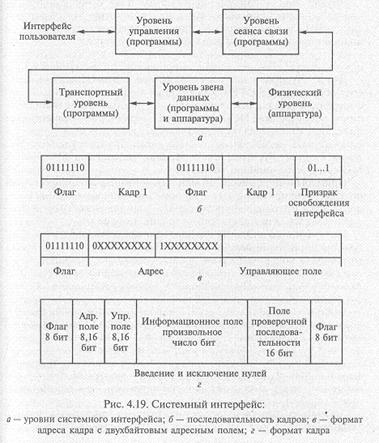
информацию в коде Манчестер П. Второй уровень реализуется аппаратно программно и организует передачу пакетов сообщений от одного устройства сети к другому. На этом уровне выполняются: кадровая синхронизация, т.е. определение начальных и конечных точек сообщения; адресация, т.е. определение устройства, принимающего сообщение; обнаружение ошибок в информации; управление подключением устройств сети к физическому адресу (рис. 4.19. б, в, г). Транспортный уровень интерфейса реализуется программно и обеспечивает надежную передачу сообщений переменной длины, несмотря на то, что второй уровень передачи может терять отдельные пакеты из-за ошибок, столкновений, дублировать их или передавать в непоследовательном порядке. Одно временно транспортный уровень следит за тем, чтобы одно более «скоростное» устройство не «завалило» данными менее «скоростное», т.а. этот уровень интерфейса управляет потоками данных с учетом объема буферной памяти устройств.