Процессы и потоки
Важнейшей функцией операционной системы является организация рационального использования всех ее аппаратных и информационных ресурсов. К основным ресурсам могут быть отнесены процессоры, память, внешние устройства, данные и программы. Располагающая одними и теми же аппаратными ресурсами, но управляемая различными ОС, вычислительная система может работать с разной степенью эффективности. Поэтому знание внутренних механизмов операционной системы позволяет косвенно судить о ее эксплуатационных возможностях и характеристиках. Хотя и в однопрограммной ОС необходимо решать задачи управления ресурсами (например, распределение памяти между приложением и ОС), главные сложности на этом пути возникают в мультипрограммных ОС, в которых за ресурсы конкурируют сразу несколько приложений. Именно поэтому большая часть всех проблем, рассматриваемых в этой главе, относится к мультипрограммным системам.
Мультипрограммирование, или многозадачность (multitasking), — это способ организации вычислительного процесса, при котором на одном процессоре попеременно выполняются сразу несколько программ. Эти программы совместно используют не только процессор, но и другие ресурсы компьютера: оперативную и внешнюю память, устройства ввода-вывода, данные. Мультипрограммирование призвано повысить эффективность использования вычислительной системы, однако эффективность может пониматься по-разному. Наиболее характерными критериями эффективности вычислительных систем являются:
□ пропускная способность — количество задач, выполняемых вычислительной системой в единицу времени;
□ удобство работы пользователей, заключающееся, в частности, в том, что они имеют возможность интерактивно работать одновременно с несколькими
приложениями на одной машине;
□ реактивность системы — способность системы выдерживать заранее заданные (возможно, очень короткие) интервалы времени между запуском программы и получением результата.
В зависимости от выбранного, критерия эффективности ОС делятся на системы пакетной обработки, системы разделения времени и системы реального времени. Каждый тип ОС имеет специфические внутренние механизмы и особые области применения. Некоторые операционные системы могут поддерживать одновременно несколько режимов, например часть задач может выполняться в режиме пакетной обработки, а часть — в режиме реального времени или в режиме разделения времени.
Мультипрограммирование в системах пакетной обработки
При использовании мультипрограммирования для повышения пропускной способности компьютера главной целью является минимизация простоев всех устройств компьютера, и прежде всего центрального процессора. Такие простои могут возникать из-за приостановки задачи по ее внутренним причинам, связанным, например, с ожиданием ввода данных для обработки. Данные могут храниться на диске или же поступать от пользователя, работающего за терминалом, а также от измерительной аппаратуры, установленной на внешних технических объектах. При возникновении такого рода блокировки выполняемой задачи естественным решением, ведущим к повышению эффективности использования процессора, является переключение процессора на выполнение другой задачи, у которой есть данные для обработки. Такая концепция мультипрограммирования положена в основу так называемых пакетных систем.
Системы пакетной обработки предназначались для решения задач в основном вычислительного характера, не требующих быстрого получения результатов. Главной целью и критерием эффективности систем пакетной обработки является максимальная пропускная способность, то есть решение максимального числа задач в единицу времени.
Для достижения этой цели в системах пакетной обработки используется следующая схема функционирования: в начале работы формируется пакет заданий, каждое задание содержит требование к системным ресурсам; из этого пакета заданий формируется мультипрограммная смесь, то есть множество одновременно выполняемых задач. Для одновременного выполнения выбираются задачи, предъявляющие разные требования к ресурсам, так, чтобы обеспечивалась сбалансированная загрузка всех устройств вычислительной машины. Например, в мультипрограммной смеси желательно одновременное присутствие вычислительных задач и задач с интенсивным вводом-выводом. Таким образом, выбор нового задания из пакета заданий зависит от внутренней ситуации, складывающейся в системе, то есть выбирается «выгодное» задание. Следовательно, в вычислительных системах, работающих под управлением пакетных ОС, невозможно гарантировать выполнение того или иного задания в течение определенного периода времени.
Рассмотрим более детально совмещение во времени операций ввода-вывода и
вычислений.
Такое совмещение может достигаться разными способами. Один из них характерен для компьютеров, имеющих специализированный процессор ввода-вывода. В компьютерах класса мэйнфреймов такие процессоры называют каналами. Обычно канал имеет систему команд, отличающуюся от системы команд центрального процессора. Эти команды специально предназначены для управления внешними устройствами, например «проверить состояние устройства», «установить магнитную головку», «установить начало листа», «напечатать строку». Канальные программы могут храниться в той же оперативной памяти, что и программы центрального процессора. В системе команд центрального процессора предусматривается специальная инструкция, с помощью которой каналу передаются параметры и указания на то, какую программу ввода-вывода он должен выполнить. Начиная с этого момента центральный процессор и канал могут работать параллельно (рис. 4.1, а).
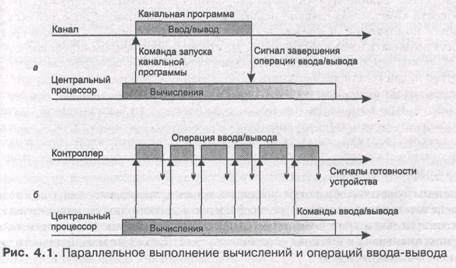
Другой способ совмещения вычислений с операциями ввода-вывода реализуется в компьютерах, в которых внешние устройства управляются не процессором ввода-вывода, а контроллерами. Каждое внешнее устройство (или группа внешних устройств одного типа) имеет свой собственный контроллер, который автономно отрабатывает команды, поступающие от центрального процессора. При этом контроллер и центральный процессор работают асинхронно. Поскольку многие внешние устройства включают электромеханические узлы, контроллер выполняет свои команды управления устройствами существенно медленнее, чем центральный процессор — свои. Это обстоятельство используется для организации параллельного выполнения вычислений и операций ввода-вывода: в промежутке между передачей команд контроллеру центральный процессор может выполнять вычисления (рис. 4.1, б). Контроллер может сообщить центральному процессору о том, что он готов принять следующую команду, сигналом прерывания либо центральный процессор узнает об этом, периодически опрашивая состояние контроллера.
Максимальный эффект ускорения достигается при наиболее полном перекрытии вычислений и ввода-вывода. Рассмотрим случай, когда процессор выполняет только одну задачу. В этой ситуации степень ускорения зависит от природы данной задачи и от того, насколько тщательно был выявлен возможный параллелизм при ее программировании. В задачах, в которых преобладают либо вычисления, либо ввод-вывод, ускорение16 почти отсутствует. Параллелизм в рамках одной задачи невозможен также, когда для продолжения вычислений необходимо полное завершение операции ввода-вывода, например, когда дальнейшие вычисления зависят от вводимых данных. В таких случаях неизбежны простои центрального процессора или канала.
Если же в системе выполняются одновременно несколько задач, появляется возможность совмещения вычислений одной задачи с вводом-выводом другой. Пока одна задача ожидает какого-либо события (заметим, что таким событием в мультипрограммной системе может быть не только завершение ввода-вывода, но и, например, наступление определенного момента времени, разблокирование файла или загрузка с диска недостающей страницы программы), процессор не простаивает, как это происходит при последовательном выполнении программ, а выполняет другую задачу.
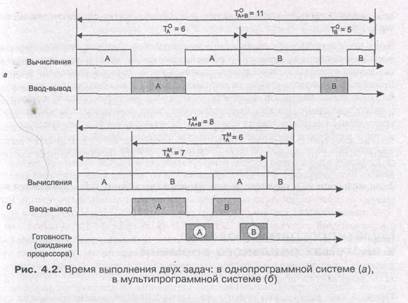
Общее время выполнения смеси задач часто оказывается меньше, чем их суммарное время последовательного выполнения (рис. 4.2, а). Однако выполнение отдельной задачи в мультипрограммном режиме может занять больше времени, чем при монопольном выделении процессора этой задаче. Действительно, при совместном использовании процессора в системе могут возникать ситуации, когда задача готова выполняться, но процессор занят выполнением другой задачи. В таких случаях задача, завершившая ввод-вывод, готова выполняться, но вынуждена ждать освобождения процессора, и это удлиняет срок ее выполнения. Так, из рис. 4.2 видно, что в однопрограммном режиме задача А выполняется за 6 единиц времени, а в мультипрограммном — за 7. Задача В также вместо 5 единиц времени выполняется за 6. Но зато время выполнения обеих задач в мультипрограммном режиме составляет всего 8 единиц, что на 3 единицы меньше, чем при последовательном выполнении.
В системах пакетной обработки переключение процессора с выполнения одной задачи на выполнение другой происходит по инициативе самой активной задачи, например, когда она отказывается от процессора из-за необходимости выполнить операцию ввода-вывода. Поэтому существует высокая вероятность того, что одна задача может надолго занять процессор и выполнение интерактивных задач станет невозможным. Взаимодействие пользователя с вычислительной машиной, на которой установлена система пакетной обработки, сводится к тому, что он приносит задание, отдает его диспетчеру-оператору, а в конце дня после выполнения всего пакета заданий получает результат. Очевидно, что такой порядок повышает эффективность функционирования аппаратуры, но снижает эффективность работы пользователя.
в системах разделения времени
Повышение удобства и эффективности работы пользователя является целью другого способа мультипрограммирования — разделения времени. Б системах разделения времени пользователям (или одному пользователю) предоставляется возможность интерактивной работы сразу с несколькими приложениями. Для этого каждое приложение должно регулярно получать возможность «общения» с пользователем. Понятно, что в пакетных системах возможности диалога пользователя с приложением весьма ограничены.
В системах разделения времени эта проблема решается за счет того, что ОС принудительно периодически приостанавливает приложения, не дожидаясь, когда они добровольно освободят процессор. Всем приложениям попеременно выделяется квант процессорного времени, таким образом пользователи, запустившие программы на выполнение, получают возможность поддерживать с ними диалог.
Системы разделения времени призваны исправить основной недостаток систем пакетной обработки — изоляцию пользователя-программиста от процесса выполнения его задач. Каждому пользователю в этом случае предоставляется терминал, с которого он может вести диалог со своей программой. Так как в системах разделения времени каждой задаче выделяется только квант процессорного времени, ни одна задача не занимает процессор надолго и время ответа оказывается приемлемым. Если квант выбран достаточно небольшим, то у всех пользователей, одновременно работающих на одной и той же машине, складывается впечатление, что каждый из них единолично использует машину.
Ясно, что системы разделения времени обладают меньшей пропускной способностью, чем системы пакетной обработки, так как на выполнение принимается каждая запущенная пользователем задача, а не та, которая «выгодна» системе. Кроме того, производительность системы снижается из-за возросших накладных расходов вычислительной мощности на более частое переключение процессора с задачи на задачу. Это вполне соответствует тому, что критерием эффективности систем разделения времени является не максимальная пропускная способность, а удобство и эффективность работы пользователя. Вместе с тем мультипрограммное выполнение интерактивных приложений повышает и пропускную способность компьютера (пусть и не в такой степени, как пакетные системы). Аппаратура загружается лучше, поскольку в то время, пока одно приложение ждет сообщения пользователя, другие приложения могут обрабатываться процессором.
в системах реального времени
Еще одна разновидность мультипрограммирования используется в системах реального времени, предназначенных для управления от компьютера различными техническими объектами (например, станком, спутником, научной экспериментальной установкой и т. д.) или технологическими процессами (например, гальванической линией, доменным процессом и т. п.). Во всех этих случаях существует предельно допустимое время, в течение которого должна быть выполнена та или иная управляющая объектом программа. В противном случае может произойти авария: спутник выйдет из зоны видимости, экспериментальные данные, поступающие с датчиков, будут потеряны, толщина гальванического покрытия не будет соответствовать норме. Таким образом, критерием эффективности здесь является способность выдерживать заранее заданные интервалы времени между запуском программы и получением результата (управляющего воздействия). Это время называется временем реакции системы, а соответствующее свойство системы — реактивностью. Требования ко времени реакции зависят от специфики управляемого процесса. Контроллер робота может требовать от встроенного компьютера ответ в течение менее 1 мс, в то время как при моделировании полета может быть приемлем ответ в 40 мс.
В системах реального времени мультипрограммная смесь представляет собой фиксированный набор заранее разработанных программ, а выбор программы на выполнение осуществляется по прерываниям (исходя из текущего состояния объекта) или в соответствии с расписанием плановых работ.
Способность аппаратуры компьютера и ОС к быстрому ответу зависит в основном от скорости переключения с одной задачи на другую и, в частности, от скорости обработки сигналов прерывания. Если при возникновении прерывания процессор должен опросить сотни потенциальных источников прерывания, то реакция системы будет слишком медленной. Время обработки прерывания в системах реального времени часто определяет требования к классу процессора даже при небольшой его загрузке.
В системах реального времени не стремятся максимально загружать все устройства, наоборот, при проектировании программного управляющего комплекса обычно закладывается некоторый «запас» вычислительной мощности на случай пиковой нагрузки. Статистические аргументы о низкой вероятности возникновения пиковой нагрузки, основанные на том, что вероятность одновременного возникновения большого количества независимых событий очень мала, не применимы ко многим ситуациям в системах управления. Например, в системе управления атомной электростанцией в случае возникновения крупной аварии атомного реактора многие аварийные датчики сработают одновременно и создадут коррелированную нагрузку. Если система реального времени не спроектирована для поддержки пиковой нагрузки, то может случиться так, что система не справится с работой именно тогда, когда она нужна в наибольшей степени.
Мультипроцессорная обработка — это способ организации вычислительного процесса в системах с несколькими процессорами, при котором несколько задач (процессов, потоков) могут одновременно выполняться на разных процессорах
системы.
Концепция мультипроцессирования ненова, она известна с 70-х годов, но до середины 80-х доступных многопроцессорных систем не существовало. Однако к настоящему времени стало обычным включение нескольких процессоров в архитектуру даже персонального компьютера. Более того, многопроцессорность теперь является одним из необходимых требований, которые предъявляются к компьютерам, используемым в качестве центрального сервера более-менее крупной сети.
Не следует путать мультипроцессорную обработку с мультипрограммной обработкой. В мультипрограммных системах параллельная работа разных устройств позволяет одновременно вести обработку нескольких программ, но при этом в процессоре в каждый момент времени выполняется только одна программа. То есть в этом случае несколько задач выполняются попеременно на одном процессоре, создавая лишь видимость параллельного выполнения. А в мультипроцессорных системах несколько задач выполняются действительно одновременно, так как имеется несколько обрабатывающих устройств — процессоров. Конечно, мультипроцессирование вовсе не исключает мультипрограммирования: на каждом из процессоров может попеременно выполняться некоторый закрепленный за данным процессором набор задач.
Мультипроцессорная организация системы приводит к усложнению всех алгоритмов управления ресурсами, например требуется планировать процессы не для одного, а для нескольких процессоров, что гораздо сложнее. Сложности заключаются и в возрастании числа конфликтов по обращению к устройствам ввода-вывода, данным, общей памяти и совместно используемым программам. Необходимо предусмотреть эффективные средства блокировки при доступе к разделяемым информационным структурам ядра. Все эти проблемы должна решать операционная система путем синхронизации процессов, ведения очередей и планирования ресурсов. Более того, сама операционная система должна быть спроектирована так, чтобы уменьшить существующие взаимозависимости между собственными компонентами.
В наши дни становится общепринятым введение в ОС функций поддержки мультипроцессорной обработки данных. Такие функции имеются во всех популярных ОС, таких как Sun Solaris 2.x, Santa Crus Operations Open Server 3.x, IBM OS/2, Microsoft Windows NT и Novell NetWare, начиная с 4.1.
Мультипроцессорные системы часто характеризуют либо как симметричные, либо как несимметричные. При этом следует четко определять, к какому аспекту мультипроцессорной системы относится эта характеристика — к типу архитектуры или к способу организации вычислительного процесса.
Симметричная архитектура мультипроцессорной системы предполагает однородность всех процессоров и единообразие включения процессоров в общую схему мультипроцессорной системы. Традиционные симметричные мультипроцессорные конфигурации разделяют одну большую память между всеми процессорами.
Масштабируемость, или возможность наращивания числа процессоров, в симметричных системах ограничена вследствие того, что все они пользуются одной и той же оперативной памятью и, следовательно, должны располагаться в одном корпусе. Такая конструкция, называемая масштабируемой по вертикали, практически ограничивает число процессоров до четырех или восьми.
В симметричных архитектурах все процессы пользуются одной и той же схемой отображения памяти. Они могут очень быстро обмениваться данными, так что обеспечивается достаточно высокая производительность для тех приложений (например, при работе с базами данных), в которых несколько задач должны активно взаимодействовать между собой.
В асимметричной архитектуре разные процессоры могут отличаться как своими характеристиками (производительностью, надежностью, системой команд и т. д., вплоть до модели микропроцессора), так и функциональной ролью, которая поручается им в системе. Например, одни процессоры могут предназначаться для работы в качестве основных вычислителей, другие — для управления подсистемой ввода-вывода, третьи — еще для каких-то особых целей.
Функциональная неоднородность в асимметричных архитектурах влечет за собой структурные отличия во фрагментах системы, содержащих разные процессоры системы. Например, они могут отличаться схемами подключения процессоров к системной шине, набором периферийных устройств и способами взаимодействия процессоров с устройствами.
Масштабирование в асимметричной архитектуре реализуется иначе, чем в симметричной. Так как требование единого корпуса отсутствует, система может состоять из нескольких устройств, каждое из которых содержит один или несколько процессоров. Это масштабирование по горизонтали. Каждое такое устройство называется кластером, а вся мультипроцессорная система — кластерной.
Другим аспектом мультипроцессорных систем, который может характеризоваться симметрией или ее отсутствием, является способ организации вычислительного процесса. Последний, как известно, определяется и реализуется операционной системой.
Асимметричное мулътипроцессирование является наиболее простым способом организации вычислительного процесса в системах с несколькими процессорами. Этот способ часто называют также «ведущий-ведомый».
Функционирование системы по принципу «ведущий-ведомый» предполагает выделение одного из процессоров в качестве «ведущего», на котором работает операционная* система и который управляет всеми остальными «ведомыми» процессорами. То есть ведущий процессор берет на себя функции распределения задач и ресурсов, а ведомые процессоры работают только как обрабатывающие устройства и никаких действий по организации работы вычислительной системы не выполняют.
Так как операционная система работает только на одном процессоре и функции управления полностью централизованы, то такая операционная система оказывается не намного сложнее ОС однопроцессорной системы.
Асимметричная организация вычислительного процесса может быть реализована как для симметричной мультипроцессорной архитектуры, в которой все процессоры аппаратно неразличимы, так и для несимметричной, для которой характерна неоднородность процессоров, их специализация на аппаратном уровне.
В архитектурно-асимметричных системах на роль ведущего процессора может быть назначен наиболее надежный и производительный процессор. Если в наборе процессоров имеется специализированный процессор, ориентированный, например, на матричные вычисления, то при планировании процессов операционная система, реализующая асимметричное мультипроцессирование, должна учитывать специфику этого процессора. Такая специализация снижает надежность системы в целом, так как процессоры не являются взаимозаменяемыми.
Симметричное мулътипроцессировапие как способ организации вычислительного процесса может быть реализовано в системах только с симметричной мультипроцессорной архитектурой. Напомним, что в таких системах процессоры работают с общими устройствами и разделяемой основной памятью.
Симметричное мультипроцессирование реализуется общей для всех процессоров операционной системой. При симметричной организации все процессоры равноправно участвуют и в управлении вычислительным процессом, и в выполнении прикладных задач. Например, сигнал прерывания от принтера, который распечатывает данные прикладного процесса, выполняемого на некотором процессоре, может быть обработан совсем другим процессором. Разные процессоры могут в какой-то момент одновременно обслуживать как разные, так и одинаковые модули общей операционной системы. Для этого программы операционной системы должны обладать свойством повторной входимости (реентерабельностью).
Операционная система полностью децентрализована. Модули ОС выполняются на любом доступном процессоре. Как только процессор завершает выполнение очередной задачи, он передает управление планировщику задач, который выбирает из общей для всех процессоров системной очереди задачу, которая будет выполняться на данном процессоре следующей. Все ресурсы выделяются для каждой выполняемой задачи по мере возникновения в них потребностей и никак не закрепляются за процессором. При таком подходе все процессоры работают с одной и той же динамически выравниваемой нагрузкой. Б решении одной задачи могут участвовать сразу несколько процессоров, если она допускает такое распараллеливание, например путем представления в виде нескольких потоков.
В случае отказа одного из процессоров симметричные системы, как правило, сравнительно просто реконфигурируются, что является их большим преимуществом перед плохо реконфигурируемыми асимметричными системами.
Симметричная и асимметричная организация вычислительного процесса в мультипроцессорной системе не связана напрямую с симметричной или асимметричной архитектурой, она определяется типом операционной системы. Так, в симметричных архитектурах вычислительный процесс может быть организован как симметричным образом, так и асимметричным. Однако асимметричная архитектура непременно влечет за собой и асимметричный способ организации вычислений.
Планирование процессов и потоков
Одной из основных подсистем мультипрограммной ОС, непосредственно влияющей на функционирование вычислительной машины, является подсистема управления процессами и потоками, которая занимается их созданием и уничтожением, поддерживает взаимодействие между ними, а также распределяет процессорное время между несколькими одновременно существующими в системе процессами и потоками.
Подсистема управления процессами и потоками ответственна за обеспечение процессов необходимыми ресурсами. ОС поддерживает в памяти специальные информационные структуры, в которые записывает, какие ресурсы выделены каждому процессу. Она может назначить процессу ресурсы в единоличное пользование или в совместное пользование с другими процессами. Некоторые из ресурсов выделяются процессу при его создании, а некоторые — динамически по запросам во время выполнения. Ресурсы могут быть приписаны процессу на все время его жизни или только на определенный период. При выполнении этих функций подсистема управления процессами взаимодействует с другими подсистемами ОС, ответственными за управление ресурсами, такими как подсистема управления памятью, подсистема ввода-вывода, файловая система.
Когда в системе одновременно выполняется несколько независимых задач, то возникают дополнительные проблемы. Хотя потоки возникают и выполняются асинхронно, у них может возникнуть необходимость во взаимодействии, например при обмене данными. Согласование скоростей потоков также очень важно для предотвращения эффекта «гонок» (когда несколько потоков пытаются изменить один и тот же файл), взаимных блокировок или других коллизий, которые возникают при совместном использовании ресурсов. Синхронизация потоков является одной из важных функций подсистемы управления процессами и потоками.
Каждый раз, когда процесс завершается, ОС предпринимает шаги, чтобы «зачистить следы» его пребывания в системе. Подсистема управления процессами закрывает все файлы, с которыми работал процесс, освобождает области оперативной памяти, отведенные под коды, данные и системные информационные структуры процесса. Выполняется коррекция всевозможных очередей ОС и списков ресурсов, в которых имелись ссылки на завершаемый процесс.
Чтобы поддерживать мультипрограммирование, ОС должна определить и оформить для себя те внутренние единицы работы, между которыми будет разделяться процессор и другие ресурсы компьютера. В настоящее время в большинстве операционных систем определены два типа единиц работы. Более крупная единица работы, обычно носящая название процесса, или задачи, требует для своего выполнения нескольких более мелких работ, для обозначения которых используют термины «поток», или <<пить».
ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------
При использовании этих терминов часто возникают сложности. Это происходит в силу нескольких причин. Во-первых, — специфика различных ОС, когда совпадающие по сути понятия получили разные названия, например задача (task) в OS/2, OS/360 и процесс (process) в UNIX, Windows NT, NetWare. Во-вторых, по мере развития системного программирования и методов организации вычислений некоторые из этих терминов получили новое смысловое значение, особенно это касается понятия «процесс», который уступил многие свои свойства новому понятию «поток». В-третьих, терминологические сложности порождаются наличием нескольких вариантов перевода англоязычных терминов на русский язык. Например, термин «thread» переводится как «нить», «поток», «облегченный процесс», «минизадача» и др. Далее в качестве названия единиц работы ОС будут использоваться термины «процесс» и «поток». В тех же случаях, когда различия между этими понятиями не будут играть существенной роли, они объединяются под обобщенным термином «задача».
Итак, в чем же состоят принципиальные отличия в понятиях «процесс» и «поток»?
Очевидно, что любая работа вычислительной системы заключается в выполнении некоторой программы. Поэтому и с процессом, и с потоком связывается определенный программный код, который для этих целей оформляется в виде исполняемого модуля. Чтобы этот программный код мог быть выполнен, его необходимо загрузить в оперативную память, возможно, выделить некоторое место на диске для хранения данных, предоставить доступ к устройствам ввода-вывода, например к последовательному порту для получения данных по подключенному к этому порту модему, и т. д. В ходе выполнения программе может также понадобиться доступ к информационным ресурсам, например файлам, портам TCP/UPD, семафорам. И, конечно же, невозможно выполнение программы без предоставления ей процессорного времени, то есть времени, в течение которого процессор выполняет коды данной программы.
В операционных системах, где существуют и процессы, и потоки, процесс рассматривается операционной системой как заявка на потребление всех видов ресурсов, кроме одного — процессорного времени. Этот последний важнейший ресурс распределяется операционной системой между другими единицами работы — потоками, которые и получили свое название благодаря тому, что они представляют собой последовательности (потоки выполнения) команд.
В простейшем случае процесс состоит из одного потока, и именно таким образом трактовалось понятие «процессу до середины 80-х годов (например, в ранних версиях UNIX) и в таком же виде оно сохранилось в некоторых современных ОС. В таких системах понятие «поток» полностью поглощается понятием «процесс», то есть остается только одна единица работы и потребления ресурсов — процесс. Мультипрограммирование осуществляется в таких ОС на уровне процессов.
Для того чтобы процессы не могли вмешаться в распределение ресурсов, а также не могли повредить коды и данные друг друга, важнейшей задачей ОС является изоляция одного процесса от другого. Для этого операционная система обеспечивает каждый процесс отдельным виртуальным адресным пространством, так что ни один процесс не может получить прямого доступа к командам и данным другого процесса.
ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------
Виртуальное адресное пространство процесса — это совокупность адресов, которыми может манипулировать программный модуль процесса. Операционная система отображает виртуальное адресное пространство процесса на отведенную процессу физическую память.
При необходимости взаимодействия процессы обращаются к операционной системе, которая, выполняя функции посредника, предоставляет им средства межпроцессной связи — конвейеры, почтовые ящики, разделяемые секции памяти и некоторые другие.
Однако в системах, в которых отсутствует понятие потока, возникают проблемы при организации параллельных вычислений в рамках процесса. А такая необходимость может возникать. Действительно, при мультипрограммировании повышается пропускная способность системы, но отдельный процесс никогда не может быть выполнен быстрее, чем в одиопрограммном режиме (всякое разделение ресурсов только замедляет работу одного из участников за счет дополнительных затрат времени на ожидание освобождения ресурса). Однако приложение, выполняемое в рамках одного процесса, может обладать внутренним параллелизмом, который в принципе мог бы позволить ускорить его решение. Если, например, в программе предусмотрено обращение к внешнему устройству, то на время этой операции можно не блокировать выполнение всего процесса, а продолжить вычисления по другой ветви программы. Параллельное выполнение нескольких работ в рамках одного интерактивного приложения повышает эффективность работы пользователя. Так, при работе с текстовым редактором желательно иметь возможность совмещать набор нового текста с такими продолжительными по времени операциями, как переформатирование значительной части текста, печать документа или его сохранение на локальном или удаленном диске. Еще одним примером необходимости распараллеливания является сетевой сервер баз данных. В этом случае параллелизм желателен как для обслуживания различных запросов к базе данных, так и для более быстрого выполнения отдельного запроса за счет одновременного .просмотра различных записей базы.
Потоки возникли в операционных системах как средство распараллеливания вычислений. Конечно, задача распараллеливания вычислений в рамках одного приложения может быть решена и традиционными способами.
Во-первых, прикладной программист может взять на себя сложную задачу организации параллелизма, выделив в приложении некоторую подпрограмму-диспетчер, которая периодически передает управление той или иной ветви вычислений. При этом программа получается логически весьма запутанной, с многочисленными передачами управления, что существенно затрудняет ее отладку и модификацию.
Во-вторых, решением является создание для одного приложения нескольких процессов для каждой из параллельных работ. Однако использование для создания процессов стандартных средств ОС не позволяет учесть тот факт, что эти процессы решают единую задачу, а значит, имеют много общего между собой — они могут работать с одними и теми же данными, использовать один и тот же кодовый сегмент, наделяться одними и теми же правами доступа к ресурсам вычислительной системы. Так, если в примере с сервером баз данных создавать отдельные процессы для каждого запроса, поступающего из сети, то все процессы будут выполнять один и тот же программный код и выполнять поиск в записях, общих для всех процессов файлов данных. А операционная система при таком подходе будет рассматривать эти процессы наравне со всеми остальными процессами и с помощью универсальных механизмов обеспечивать их изоляцию друг от друга. В данном случае все эти достаточно громоздкие механизмы используются явно не по назначению, выполняя не только бесполезную, но и вредную работу, затрудняющую обмен данными между различными частями приложения. Кроме того, на создание каждого процесса ОС тратит определенные системные ресурсы, которые в данном случае неоправданно дублируются — каждому процессу выделяются собственное виртуальное адресное пространство, физическая память, закрепляются устройства ввода-вывода и т. п.
Из всего вышеизложенного следует, что в операционной системе наряду с процессами нужен другой механизм распараллеливания вычислений, который учитывал бы тесные связи между отдельными ветвями вычислений одного и того же приложения. Для этих целей современные ОС предлагают механизм много-поточной обработки (multithreading). При этом вводится новая единица работы — поток выполнения, а понятие «процесс» в значительной степени меняет смысл. Понятию «поток» соответствует последовательный переход процессора от одной команды программы к другой. ОС распределяет процессорное время между потоками. Процессу ОС назначает адресное пространство и набор ресурсов, которые совместно используются всеми его потоками.
ПРИМЕЧАНИЕ -----------------------------------------------------------------------:---------------------
Заметим, что в однопрограммных системах не возникает необходимости введения понятия, обозначающего единицу работы, так как там не существует проблемы разделения ресурсов.
Создание потоков требует от ОС меньших накладных расходов, чем процессов. В отличие от процессов, которые принадлежат разным, вообще говоря, конкурирующим приложениям, все потоки одного процесса всегда принадлежат одному приложению, поэтому ОС изолирует потоки в гораздо меньшей степени, нежели процессы в традиционной мультипрограммной системе. Все потоки одного процесса используют общие файлы, таймеры, устройства, одну и ту же область оперативной памяти, одно и то же адресное пространство. Это означает, что они разделяют одни и те же глобальные переменные. Поскольку каждый поток может иметь доступ к любому виртуальному адресу процесса, один поток может использовать стек другого потока. Между потоками одного процесса нет полной защиты, потому что, во-первых, это невозможно, а во-вторых, не нужно. Чтобы организовать взаимодействие и обмен данными, потокам вовсе не требуется обращаться к ОС, им достаточно использовать общую память — один поток записывает данные, а другой читает их, С другой стороны, потоки разных процессов по-прежнему хорошо защищены друг от друга.
Итак, мультипрограммирование более эффективно на уровне потоков, а не процессов. Каждый поток имеет собственный счетчик команд и стек. Задача, оформленная в виде нескольких потоков в рамках одного процесса, может быть выполнена быстрее за счет псевдопараллельного (или параллельного в мультипроцессорной системе) выполнения ее отдельных частей. Например, если электронная таблица была разработана с учетом возможностей многопоточной обработки, то пользователь может запросить пересчет своего рабочего листа и одновременно продолжать заполнять таблицу. Особенно эффективно можно использовать многопоточность для выполнения распределенных приложений, например многопоточный сервер может параллельно выполнять запросы сразу нескольких клиентов.
Использование потоков связано не только со стремлением повысить производительность системы за счет параллельных вычислений, но и с целью создания более читабельных, логичных программ. Введение нескольких потоков выполнения упрощает программирование. Например, в задачах типа «писатель-читатель» один поток выполняет запись в буфер, а другой считывает записи из него. Поскольку они разделяют общий буфер, не стоит их делать отдельными процессами. Другой пример использования потоков — управление сигналами, такими как прерывание с клавиатуры (del или break). Вместо обработки сигнала прерывания один поток назначается для постоянного ожидания поступления сигналов. Таким образом, использование потоков может сократить необходимость в прерываниях пользовательского уровня. В этих примерах не столь важно параллельное выполнение, сколь важна ясность программы.
Наибольший эффект от введения многопоточной обработки достигается в мультипроцессорных системах, в которых потоки, в том числе и принадлежащие одному процессу, могут выполняться на разных процессорах действительно параллельно (а не псевдопараллельно).
Создать процесс — это прежде всего означает создать описатель процесса, в качестве которого выступает одна или несколько информационных структур, содержащих все сведения о процессе, необходимые операционной системе для управления им. В число таких сведений могут входить, например, идентификатор процесса, данные о расположении в памяти исполняемого модуля, степень привилегированности процесса (приоритет и права доступа) и т. п. Примерами описателей процесса являются блок управления задачей (ТСВ — Task Control Block) в OS/360, управляющий блок процесса. (РСВ — Process Control Block) в OS/2, дескриптор процесса в UNIX, объект-процесс (object-process) в Windows NT.
Создание описателя процесса знаменует собой появление в системе еще одного претендента на вычислительные ресурсы. Начиная с этого момента при распределении ресурсов ОС должна принимать во внимание потребности нового процесса.
Создание процесса включает загрузку кодов и данных исполняемой программы данного процесса с диска в оперативную память. Для этого ОС должна обнаружить местоположение такой программы на диске, перераспределить оперативную память и выделить память исполняемой программе нового процесса. Затем необходимо считать программу в выделенные для нее участки памяти и, возможно, изменить параметры программы в зависимости от размещения в памяти. В системах с виртуальной памятью в начальный момент может загружаться только часть кодов и данных процесса, с тем чтобы «подкачивать» остальные по мере необходимости. Существуют системы, в которых на этапе создания процесса не требуется непременно загружать коды и данные в оперативную память, вместо этого исполняемый модуль копируется из того каталога файловой системы, в котором он изначально находился, в область подкачки — специальную область диска, отведенную для хранения кодов и данных процессов. При выполнении всех этих действий подсистема управления процессами тесно взаимодействует с подсистемой управления памятью и файловой системой.
В многопоточной системе при создании процесса ОС создает для каждого процесса как минимум один поток выполнения. При создании потока так же, как и при создании процесса, операционная система генерирует специальную информационную структуру — описатель потока, который содержит идентификатор потока, данные о правах доступа и приоритете, о состоянии потока и другую информацию. В исходном состоянии поток (или процесс, если речь идет о системе, в которой понятие «поток» не определяется) находится в приостановленном состоянии. Момент выборки потока на выполнение осуществляется в соответствии с принятым в данной системе правилом предоставления процессорного времени и с учетом всех существующих в данный момент потоков и процессов. В случае если коды и данные процесса находятся в области подкачки, необходимым условием активизации потока процесса является также наличие места в оперативной памяти для загрузки его исполняемого модуля.
Во многих системах поток может обратиться к ОС с запросом на создание так называемых потоков-потомков. В разных ОС по-разному строятся отношения между потоками-потомками и их родителями. Например, в одних ОС выполнение родительского потока синхронизируется с его потомками, в частности после завершения родительского потока ОС может снимать с выполнения всех его потомков. В других системах потоки-потомки могут выполняться асинхронно по отношению к родительскому потоку. Потомки, как правило, наследуют многие
свойства родительских потоков. Во многих системах порождение потомков является основным механизмом создания процессов и потоков.
Рассмотрим в качестве примера создание процессов в популярной версии операционной системы UNIX System V Release 4. этой системе потоки не поддерживаются, в качестве единицы управления и единицы потребления ресурсов выступает процесс.
При управлении процессами операционная система использует два основных типа информационных структур: дескриптор процесса и контекст процесса. Дескриптор процесса содержит такую информацию о процессе, которая необходима ядру в течение всего жизненного цикла процесса независимо от того, находится он в активном или пассивном состоянии, находится образ процесса в оперативной памяти или выгружен на диск. (Образом процесса называется совокупность его кодов и данных.)
Дескрипторы отдельных процессов объединены в список, образующий таблицу процессов. Память для таблицы процессов отводится динамически в области ядра. На основании информации, содержащейся в таблице процессов, операционная система осуществляет планирование и синхронизацию процессов. В дескрипторе прямо или косвенно (через указатели, на связанные с процессом структуры) содержится информация о состоянии процесса, о расположении образа процесса в оперативной памяти и на диске, о значении отдельных составляющих приоритета, а также о его итоговом значении — глобальном приоритете, об идентификаторе пользователя, создавшего процесс, о родственных процессах, о событиях, осуществления которых ожидает данный процесс, и некоторая другая информация.
Контекст процесса содержит менее оперативную, но более объемную часть информации о процессе, необходимую для возобновления выполнения процесса с прерванного места: содержимое регистров процессора, коды ошибок выполняемых процессором системных вызовов, информация обо всех открытых данным процессом файлах и незавершенных операциях ввода-вывода и другие данные, характеризующие состояние вычислительной среды в момент прерывания. Контекст, так же как и дескриптор процесса, доступен только программам ядра, то есть находится в виртуальном адресном пространстве операционной системы, однако он хранится не в области ядра, а непосредственно примыкает к образу процесса и перемещается вместе с ним, если это необходимо, из оперативной памяти на диск.
Порождение процессов в системе UNIX происходит в результате выполнения системного вызова fork. ОС строит образ порожденного процесса, являющийся точной копией образа породившего процесса, то есть дублируются дескриптор, контекст и образ процесса. Сегмент данных и сегмент стека родительского процесса копируются на новое место, образуя сегменты данных и стека процесса-потомка. Процедурный сегмент копируется только тогда, когда он не является разделяемым. В противном случае процесс-потомок становится еще одним процессом, разделяющим данный процедурный сегмент.
После выполнения системного вызова fork оба процесса продолжают выполнение с одной и той же точки. Чтобы процесс мог опознать, является он родительским процессом или процессом-потомком, системный вызов fork возвращает в качестве своего значения в породивший процесс идентификатор порожденного процесса, а в порожденный процесс — NULL. Типичное разветвление на языке С записывается так:
if( fork( )) { действия родительского процесса }
else { действия порожденного процесса }
Идентификатор потомка может быть присвоен переменной, входящей в контекст, родительского процесса. Так как контекст процесса наследуется его потомками, то потомки могут узнать идентификаторы своих «старших братьев», таким образом сумма знаний наследуется при порождении и может быть распространена между родственными процессами. На независимости идентификатора процесса от выполняемой процессом программы построен механизм, позволяющий процессу перейти к выполнению другой программы с помощью системного вызова exec.
Таким образом, в UNIX порождение нового процесса происходит в два этапа — сначала создается копия процесса-родителя, затем у нового процесса производится замена кодового сегмента на заданный.
Вновь созданному процессу операционная система присваивает целочисленный идентификатор, уникальный на весь период функционирования системы.
Планирование и диспетчеризация потоков
На протяжении существования процесса выполнение его потоков может быть многократно прервано и продолжено. (В системе, не поддерживающей потоки, все сказанное ниже о планировании и диспетчеризации относится к процессу в целом.)
Переход от выполнения одного потока к другому осуществляется в результате планирования и диспетчеризации. Работа по определению того, в какой момент необходимо прервать выполнение текущего активного потока и какому потоку предоставить возможность выполняться, называется планированием. Планирование потоков осуществляется на основе информации, хранящейся в описателях процессов и потоков. При планировании могут приниматься во внимание приоритет потоков, время их ожидания в очереди, накопленное время выполнения, интенсивность обращений к вводу-выводу и другие факторы. ОС планирует выполнение потоков независимо от того, принадлежат ли они одному или разным процессам. Так, например, после выполнения потока некоторого процесса ОС может выбрать для выполнения другой поток того же процесса или же назначить к выполнению поток другого процесса,
Планирование потоков, по существу, включает в себя решение двух задач;
□ определение момента времени для смены текущего активного потока;
□ выбор для выполнения потока из очереди готовых потоков.
Существует множество различных алгоритмов планирования потоков, по-своему решающих каждую из приведенных выше задач. Алгоритмы планирования могут преследовать различные цели и обеспечивать разное качество мультипрограммирования. Например, в одном случае выбирается такой алгоритм планирования, при котором гарантируется, что ни один поток/процесс не будет занимать процессор дольше определенного времени, в другом случае целью является максимально быстрое выполнение «коротких» задач, а в третьем случае — преимущественное право занять процессор получают потоки интерактивных приложений. Именно особенности реализация планирования потоков в наибольшей степени определяют специфику операционной системы, в частности, является ли она системой пакетной обработки, системой разделения времени или системой реального времени.
В большинстве операционных систем универсального назначения планирование осуществляется динамически (on-line), то есть решения принимаются во время работы системы на основе анализа текущей ситуации. ОС работает в условиях неопределенности — потоки и процессы появляются в случайные моменты времени и также непредсказуемо завершаются. Динамические планировщики могут гибко приспосабливаться к изменяющейся ситуации и не используют никаких предположений о мультипрограммной смеси. Для того чтобы оперативно найти в условиях такой неопределенности оптимальный в некотором смысле порядок выполнения задач, операционная система должна затрачивать значительные усилия.
Другой тип планирования — статический — может быть использован в специализированных системах, в которых весь набор одновременно выполняемых задач определен заранее, например в системах реального времени. Планировщик называется статическим (или предварительным планировщиком), если он принимает решения о планировании не во время работы системы, а заранее (off-line). Соотношение между динамическим и статическим планировщиками аналогично соотношению между диспетчером железной дороги, который пропускает поезда строго по предварительно составленному расписанию, и регулировщиком на перекрестке автомобильных дорог, не оснащенном светофорами, который решает, какую машину остановить, а какую пропустить, в зависимости от ситуации на перекрестке.
Результатом работы статического планировщика является таблица, называемая расписанием, в которой указывается, какому потоку/процессу, когда и на какое время должен быть предоставлен процессор. Для построения расписания планировщику нужны как можно более полные предварительные знания о характеристиках набора задач, например о максимальном времени выполнения каждой задачи, ограничениях предшествования, ограничениях по взаимному исключению, предельным срокам и т. д.
После того как расписание готово, оно может использоваться операционной системой для переключения потоков и процессов. При этом накладные расходы ОС на исполнение расписания оказываются значительно меньшими, чем при динамическом планировании, и сводятся лишь к диспетчеризации потоков/процессов.
Диспетчеризация заключается в реализации найденного в результате планирования (динамического или статистического) решения, то есть в переключении процессора с одного потока на другой. Прежде чем прервать выполнение потока, ОС запоминает его контекст, с тем чтобы впоследствии использовать эту информацию для последующего возобновления выполнения данного потока. Контекст отражает, во-первых, состояние аппаратуры компьютера в момент прерывания потока: значение счетчика команд, содержимое регистров общего назначения,
режим работы процессора, флаги, маски прерываний и другие параметры. Во-вторых, контекст включает параметры операционной среды, а именно ссылки на открытые файлы, данные о незавершенных операциях ввода-вывода, коды ошибок выполняемых данным потоком системных вызовов и т. д.
Диспетчеризация сводится к следующему:
□ сохранение контекста текущего потока, который требуется сменить;
□ загрузка контекста нового потока, выбранного в результате планирования;
□ запуск нового потока на выполнение.
Поскольку операция переключения контекстов существенно влияет на производительность вычислительной системы, программные модули ОС выполняют диспетчеризацию потоков совместно с аппаратными средствами процессора.
В контексте потока можно выделить часть, общую для всех потоков данного процесса (ссылки на открытые файлы), и часть, относящуюся только к данному потоку (содержимое регистров, счетчик команд, режим процессора). Например, в среде NetWare 4.x различаются три вида контекстов: глобальный контекст (контекст процесса), контекст группы потоков и контекст отдельного потока. Соотношение между данными этих контекстов напоминает соотношение глобальных и локальных переменных в программе, написанной на языке С. Переменные глобального контекста доступны для всех потоков, созданных в рамках одного процесса. Переменные локального контекста доступны только для кодов определенного потока, аналогично локальным переменным функции. В NetWare можно создавать несколько групп потоков внутри одного процесса и эти группы будут иметь свой групповой контекст. Переменные, принадлежащие групповому контексту, доступны всем потокам, входящим в группу, но недоступны остальным потокам.
Очевидно, что такая иерархическая организация контекстов ускоряет переключение потоков, так как при переключении с потока на поток в пределах одной группы нет необходимости заменять контексты групп или глобальные контексты, достаточно лишь заменить контексты потоков, которые имеют меньший объем. Аналогично при переключении с потока одной группы на поток другой группы в пределах одного процесса глобальный контекст не изменяется, а изменяется лишь контекст группы. Переключение же глобальных контекстов происходит только при переходе с потока одного процесса на поток другого процесса.
ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------
В различных ОС можно встретить компоненты ОС, имеющие названия планировщик (scheduler) или диспетчер {dispatcher). He следует однозначно судить о функциональном назначении этих компонентов по их названиям, то есть считать, что планировщик выполняет планирование, а диспетчер — диспетчеризацию в том смысле, в котором эти функции были определены выше. Чаще всего то и другое названия используются для обозначения компонентов, которые занимаются планированием.
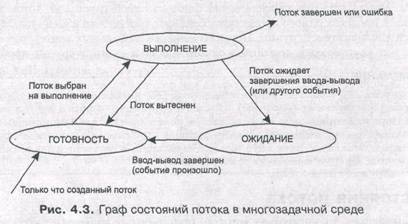
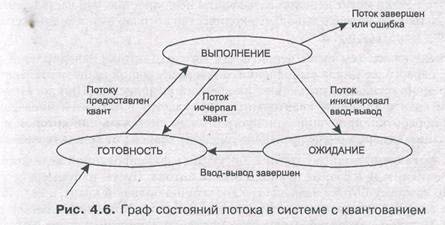
ОС выполняет планирование потоков, принимая во внимание их состояние. В мультипрограммной системе поток может находиться в одном из трех основных состояний:
□ выполнение — активное состояние потока, во время которого поток обладает всеми необходимыми ресурсами и непосредственно выполняется процессором;
Q ожидание — пассивное состояние потока, находясь в котором, поток заблокирован по своим внутренним причинам (ждет осуществления некоторого события, например завершения операции ввода-вывода, получения сообщения от другого потока или освобождения какого-либо необходимого ему ресурса);
□ готовность — также пассивное состояние потока, но в этом случае поток заблокирован в связи с внешним по Отношению к нему обстоятельством (имеет все требуемые для него ресурсы, готов выполняться, однако процессор занят выполнением другого потока).
ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------Состояния выполнения и ожидания могут быть отнесены и к задачам, выполняющимся в однопрограммном режиме, а вот состояние готовности характерно только для режима
мультипрограммирования.
В течение своей жизни каждый поток переходит из одного состояния в другое в соответствии с алгоритмом планирования потоков, принятым в данной операционной системе.
Рассмотрим типичный граф состояния потока (рис. 4.3). Только что созданный поток находится в состоянии готовности, он готов к выполнению и стоит в очереди к процессору. Когда в результате планирования подсистема управления потоками принимает решение об активизации данного потока, он переходит в состояние выполнения и находится в нем до тех пор, пока либо он сам освободит процессор, перейдя в состояние ожидания какого-нибудь события, либо будет принудительно «вытеснен» из процессора, например вследствие исчерпания отведенного данному потоку кванта процессорного времени. Б последнем случае поток возвращается в состояние готовности. В это же состояние поток переходит из состояния ожидания, после того как ожидаемое событие произойдет.
В состоянии выполнения в однопроцессорной системе может находиться не более одного потока, а в каждом из состояний ожидания и готовности — несколько
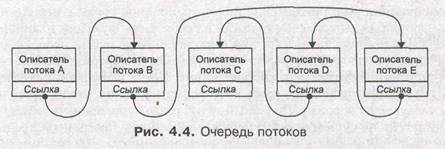
потоков. Эти потоки образуют очереди соответственно ожидающих и готовых потоков. Очереди потоков организуются путем объединения в списки описателей отдельных потоков. Таким образом, каждый описатель потока, кроме всего прочего, содержит по крайней мере один указатель на другой описатель, соседствующий с ним в очереди. Такая организация очередей позволяет легко их переупорядочивать, включать и исключать потоки, переводить потоки из одного состояния в другое. Если предположить, что на рис. 4.4 показана очередь готовых потоков, то запланированный порядок выполнения выглядит так: А, В, Е, D, С.
Вытесняющие и невытесняющие алгоритмы планирования
С самых общих позиций все множество алгоритмов планирования можно разделить на два класса: вытесняющие и невытесняющие алгоритмы планирования.
□ Невытесняющие (non-preemptive) алгоритмы основаны на том, что активному потоку позволяется выполняться, пока он сам, по собственной инициативе, не отдаст управление операционной системе для того, чтобы та выбрала из очереди другой готовый к выполнению поток.
□ Вытесняющие (preemptive) алгоритмы — это такие способы планирования потоков, в которых решение о переключении процессора с выполнения одного потока на выполнение другого потока принимается операционной системой, а не активной задачей.
Основным различием между вытесняющими и невытесняющими алгоритмами является степень централизации механизма планирования потоков. При вытесняющем мультипрограммировании функции планирования потоков целиком сосредоточены в операционной системе и программист пишет свое приложение, не заботясь о том, что оно будет выполняться одновременно с другими задачами. При этом операционная система выполняет следующие функции: определяет момент снятия с выполнения активного потока, запоминает его контекст, выбирает из очереди готовых потоков следующий, запускает новый поток на выполнение, загружая его контекст.
При невытесняющем мультипрограммировании механизм планирования распределен между операционной системой и прикладными программами. Прикладная программа, получив управление от операционной системы, сама определяет момент завершения очередного цикла своего выполнения и только затем передает управление ОС с помощью какого-либо системного вызова. ОС формирует
очереди потоков и выбирает в соответствии с некоторым правилом (например, с учетом приоритетов) следующий поток на выполнение. Такой механизм создает проблемы как для пользователей, так и для разработчиков приложений.
Для пользователей это означает, что управление системой теряется на произвольный период времени, который определяется приложением (а не пользователем). Если приложение тратит слишком много времени на выполнение какой-либо работы, например на форматирование диска, пользователь не может переключиться с этой задачи на другую задачу, например на текстовый редактор, в то время как форматирование продолжалось бы в фоновом режиме.
Поэтому разработчики приложений для операционной среды с невытесняющей многозадачностью вынуждены, возлагая на себя часть функций планировщика, создавать приложения так, чтобы они выполняли свои задачи небольшими частями. Например, программа форматирования может отформатировать одну дорожку дискеты и вернуть управление системе. После выполнения других задач система возвратит управление программе форматирования, чтобы та отформатировала следующую дорожку. Подобный метод разделения времени между задачами работает, но он существенно затрудняет разработку программ и предъявляет повышенные требования к квалификации программиста. Программист должен обеспечить «дружественное» отношение своей программы к другим выполняемым одновременно с ней программам. Для этого в программе должны быть предусмотрены частые передачи управления операционной системе. Крайним проявлением «не дружественности» приложения является его зависание, которое приводит к общему краху системы. В системах с вытесняющей многозадачностью такие ситуации, как правило, исключены, так как центральный планирующий механизм имеет возможность снять зависшую задачу с выполнения.
Однако распределение функций планирования потоков между системой и приложениями не всегда является недостатком, а при определенных условиях может быть и преимуществом, потому что дает возможность разработчику приложений самому проектировать алгоритм планирования, наиболее подходящий для данного фиксированного набора задач. Так как разработчик сам определяет в программе момент возвращения управления, то при этом исключаются нерациональные прерывания программ в «неудобные» для них моменты времени. Кроме того, легко разрешаются проблемы совместного использования данных: задача во время каждого цикла выполнения использует их монопольно и уверена, что на протяжении этого периода никто другой не изменит данные. Существенным преимуществом невытесняющего планирования является более высокая скорость переключения с потока на поток.
ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------
Понятия вытесняющих и невытесняющих алгоритмов планирования иногда отождествляют с понятиями приоритетных и бесприоритетных дисциплин, что, возможно, связано со звучанием соответствующих англоязычных терминов «preemptive» и «non-preemptive». Однако это совершенно неверно, так как приоритеты в том и другом случаях могут как использоваться, так и не использоваться.
Почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений (UNIX, Windows NT/2000, OS/2,
VAX/VMS), реализованы вытесняющие алгоритмы планирования потоков (процессов). В последнее время дошла очередь и до ОС класса настольных систем, например OS/2 Warp и Windows 95/98.
Примером эффективного использования невытесняющего планирования являются файл-серверы NetWare 3.x и 4.x, в которых в значительной степени благодаря такому планированию достигнута высокая скорость выполнения файловых операций. В соответствии с концепцией невытесняющего планирования, чтобы не занимать процессор слишком долго, поток в NetWare сам отдает управление планировщику ОС, используя следующие системные вызовы:
□ ThreadSwitch — поток, вызвавший эту функцию, считает себя готовым к немедленному выполнению, но отдает управление для того, чтобы могли выполняться и другие потоки;
□ ThreadSwitchWithDelay — функция аналогична предыдущей, но поток считает, что будет готов к выполнению только через определенное количество переключений с потока на поток;
□ Del ay — функция аналогична предыдущей, но задержка дается в миллисекундах;
□ ThreadSwitchLowPriority — функция отдачи управления, отличается от Thread-Switch тем, что поток просит поместить его в очередь готовых к выполнению, но низкоприоритетных потоков.
Планировщик NetWare использует несколько очередей готовых потоков (рис. 4.5). Только что созданный поток попадает в конец очереди RunList, которая содержит готовые к выполнению потоки. После отказа от процессора поток попадает в ту или иную очередь в зависимости от того, какой из системных вызовов был использован при передаче управления. Поток поступает в конец очереди RunList при вызове ThreadSwitch, в конец очереди DelayedWorkToDoList при вызовах Thread-SwitchWithDelay или Delay или же в конец очереди LowPriorityRunList при вызове ThreadSwitchLowPriority.
После того как выполнявшийся процессором поток завершит свой очередной цикл выполнения, отдав управление с помощью одного из вызовов передачи управления (или вызова ожидания на семафоре), планировщик выбирает для выполнения стоящий первым в очереди RunList поток и запускает его.
Потоки, находящиеся в очереди DelayedWorkToDoList, после завершения условия ожидания перемещаются в конец очереди RunList.
Потоки, находящиеся в очереди LowPriorityRunList, запускаются на выполнение только в том случае, если очередь RunList пуста. Обычно в эту очередь назначаются потоки, выполняющие несрочную фоновую работу.
Очередь WorkToDolist является в системе самой приоритетной. В эту очередь попадают так называемые рабочие потоки. В NetWare, как и в некоторых других ОС, вместо создания нового потока для выполнения определенной работы может быть использован уже существующий системный поток. Пул рабочих потоков создается при старте системы для системных целей и выполнения срочных работ. Рабочие потоки ОС обладают наивысшим приоритетом, то есть попадают на выполнение перед потоками из очереди RunList. Планировщик разрешает выполниться подряд только определенному количеству потоков из очереди Work-ToDoList, а затем запускает поток из очереди RunList.

Описанный невытесняющий механизм организации многопоточной работы в ОС NetWare v3.x и NetWare 4.x потенциально очень производителен, так как отличается небольшими накладными расходами ОС на диспетчеризацию потоков за счет простых алгоритмов планирования и иерархии контекстов. Но для достижения высокой производительности к разработчикам приложений для ОС NetWare предъявляются высокие требования, так как распределение процессорного времени между различными приложениями зависит в конечном счете от искусства программиста.
Алгоритмы планирования, основанные на квантовании
В основе многих вытесняющих алгоритмов планирования лежит концепция квантования. В соответствии с этой концепцией каждому потоку поочередно для выполнения предоставляется ограниченный непрерывный период процессорного времени — квант. Смена активного потока происходит, если:
□ поток завершился и покинул систему;
□ произошла ошибка;
□ поток перешел в состояние ожидания;
□ исчерпан квант процессорного времени, отведенный данному потоку.
Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает, когда ему будет предоставлен новый квант процессорного времени, а на выполнение в соответствии с определенным правилом выбирается новый поток из очереди готовых, Граф состояний потока, изображенный на рис. 4.6, соответствует алгоритму планирования, основанному на квантовании.
Кванты, выделяемые потокам, могут быть одинаковыми для всех потоков или одинаковой длины q (рис. 4.7). Если в системе имеется n потоков, то время, которое поток различными. Рассмотрим, например, случай, когда всем потокам предоставляются кванты проводит в ожидании следующего кванта, можно грубо оценить как q(n-l). Чем больше потоков в системе, тем больше время ожидания, тем меньше возможности вести одновременную интерактивную работу нескольким пользователям. Но если величина кванта выбрана очень небольшой, то значение произведения q(n-1) все равно будет достаточно мало для того, чтобы пользователь не ощущал дискомфорта от присутствия в системе других пользователей. Типичное значение кванта в системах разделения времени составляет десятки
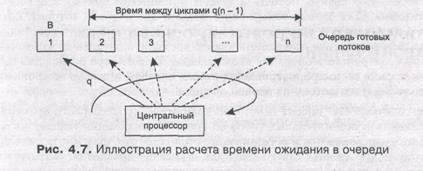
Если квант короткий, то суммарное время, которое проводит поток в ожидании процессора, прямо пропорционально времени, требуемому для его выполнения (то есть времени, которое потребовалось бы для выполнения этого потока при монопольном использовании вычислительной системы). Действительно, поскольку время ожидания между двумя циклами выполнения равно q(n-l), а количество циклов B/q, где В — требуемое время выполнения, то W=B(n-l). Заметим, что эти соотношения представляют собой весьма грубые оценки, основанные на предположении, что В значительно превышает q. При этом не учитывается, что потоки могут использовать кванты не полностью, что часть времени они могут тратить на ввод-вывод, что количество потоков в системе может динамически меняться и т. д.
Чем больше квант, тем выше вероятность того, что потоки завершатся в результате первого же цикла выполнения, и тем менее явной становится зависимость времени ожидания потоков от их времени выполнения. При достаточно большом кванте алгоритм квантования вырождается в алгоритм последовательной обработки, присущий однопрограммным системам, при котором время ожидания задачи в очереди вообще никак не зависит от ее длительности.
Кванты, выделяемые одному потоку, могут быть фиксированной величины, а могут и изменяться в разные периоды жизни потока. Пусть, например, первоначально каждому потоку назначается достаточно большой квант, а величина каждого следующего кванта уменьшается до некоторой заранее заданной величины. В таком случае преимущество получают короткие задачи, которые успевают выполняться в течение первого кванта, а длительные вычисления будут проводиться в фоновом режиме. Можно представить себе алгоритм планирования, в котором каждый следующий квант, выделяемый определенному потоку, больше предыдущего. Такой подход позволяет уменьшить накладные расходы на переключение задач в том случае, когда сразу несколько задач выполняют длительные вычисления.
Потоки получают для выполнения квант времени, но некоторые из них используют его не полностью, например из-за необходимости выполнить ввод или вывод данных. В результате возникает ситуация, когда потоки с интенсивными обращениями к вводу-выводу используют только небольшую часть выделенного им процессорного времени. Алгоритм планирования может исправить эту «несправедливость». В качестве компенсации за неиспользованные полностью кванты потоки получают привилегии при последующем обслуживании. Для этого планировщик создает две очереди готовых потоков (рис. 4.8). Очередь 1 образована потоками, которые пришли в состояние готовности в результате исчерпания кванта времени, а очередь 2 — потоками, у которых завершилась операция ввода-вывода. При выборе потока для выполнения прежде всего просматривается вторая очередь, и только если она пуста, квант выделяется потоку из первой очереди.
Многозадачные ОС теряют некоторое количество процессорного времени для выполнения вспомогательных работ во время переключения контекстов задач. При этом запоминаются и восстанавливаются регистры, флаги и указатели стека, а также проверяется статус задач для передачи управления. Затраты на эти вспомогательные действия не зависят от величины кванта времени, поэтому чем больше квант, тем меньше суммарные накладные расходы, связанные с переключением потоков.

ПРИМЕЧАНИЕ ---------------------------------------------------------------------------------------------
В алгоритмах, основанных на квантовании, какую бы цель они не преследовали (предпочтение коротких или длинных задач, компенсация недоиспользованного кванта или минимизация накладных расходов, связанных с переключениями), не используется никакой предварительной информации о задачах. При поступлении задачи на обработку ОС не имеет никаких сведений о том, является ли она короткой или длинной, насколько интенсивными будут ее запросы к устройствам ввода-вывода, насколько важно ее быстрое выполнение и т. д. Дифференциация обслуживания при квантовании базируется па «истории существования» потока в системе.
Алгоритмы планирования, основанные на приоритетах
Другой важной концепцией, лежащей в основе многих вытесняющих алгоритмов планирования, является приоритетное обслуживание. Приоритетное обслуживание предполагает наличие у потоков некоторой изначально известной характеристики — приоритета, на основании которой определяется порядок их выполнения. Приоритет — это число, характеризующее степень привилегированности потока при использовании ресурсов вычислительной машины, в частности процессорного времени; чем выше приоритет, тем выше привилегии, тем меньше времени будет проводить поток в очередях.
Приоритет может выражаться целым или дробным, положительным или отрицательным значением. В некоторых ОС принято, что приоритет потока тем выше, чем больше (в арифметическом смысле) число, обозначающее приоритет. Б других системах, наоборот, чем меньше число, тем выше приоритет.
В большинстве операционных систем, поддерживающих потоки, приоритет потока непосредственно связан с приоритетом процесса, в рамках которого выполняется данный поток. Приоритет процесса назначается операционной системой при его создании. Значение приоритета включается в описатель процесса и используется при назначении приоритета потокам этого процесса. При назначении приоритета вновь созданному процессу ОС учитывает, является этот процесс системным или прикладным, каков статус пользователя, запустившего процесс, было ли явное указание пользователя на присвоение процессу определенного уровня приоритета. Поток может быть инициирован не только по команде пользователя, но и в результате выполнения системного вызова другим потоком. В этом случае при назначении приоритета новому потоку ОС должна принимать во внимание значение параметров системного вызова.
Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока. Изменение приоритета могут происходить по инициативе самого потока, когда он обращается с соответствующим вызовом к операционной системе, или по инициативе пользователя, когда он выполняет соответствующую команду. Кроме того, ОС сама может изменять приоритеты потоков в зависимости от ситуации, складывающейся в системе. В последнем случае приоритеты называются динамическими в отличие от неизменяемых, фиксированных, приоритетов.
От того, какие приоритеты назначены потокам, существенно зависит эффективность работы всей вычислительной системы. В современных ОС во избежание разбалансировки системы, которая может возникнуть при неправильном назначении приоритетов, возможности пользователей влиять на приоритеты процессов и потоков стараются ограничивать. При этом обычные пользователи, как правило, не имеют права повышать приоритеты своим потокам, это разрешено делать (да и то в определенных пределах) только администраторам. В большинстве же случаев ОС присваивает приоритеты потокам по умолчанию.
В качестве примера рассмотрим схему назначения приоритетов потокам, принятую в операционной системе Windows NT (рис. 4.9). В системе определено 32 уровня приоритетов и два класса потоков — потоки реального времени и потоки с переменными приоритетами. Диапазон от 1 до 15 включительно отведен для потоков с переменными приоритетами, а от 16 до 31 — для более критичных ко времени потоков реального времени (приоритет 0 зарезервирован для системных целей).

При создании процесса он в зависимости от класса получает по умолчанию базовый приоритет в верхней или нижней части диапазона. Базовый приоритет процесса в дальнейшем может быть повышен или понижен операционной системой. Первоначально поток получает значение базового приоритета из диапазона базового приоритета процесса, в котором он был создан. Пусть, например, значение базового приоритета некоторого процесса равно К. Тогда все потоки данного процесса получат базовые приоритеты из диапазона [К-2, К+2]. Отсюда видно, что, изменяя базовый приоритет процесса, ОС может влиять на базовые приоритеты его потоков.
В Windows NT с течением времени приоритет потока, относящегося к классу потоков с переменными приоритетами, может отклоняться от базового приоритета потока, причем эти изменения могут быть не связаны с изменениями базового приоритета процесса. ОС может повышать приоритет потока (который в этом ; случае называется динамическим) в тех случаях, когда поток не полностью использовал отведенный ему квант, или понижать приоритет, если квант был использован полностью. ОС наращивает приоритет дифференцированно в зависимости от того, какого типа событие не дало потоку полностью использовать квант. В частности, ОС повышает приоритет в большей степени потокам, которые ожидают ввода с клавиатуры (интерактивным приложениям) и в меньшей степени — потокам, выполняющим дисковые операции. Именно на основе динамических приоритетов осуществляется планирование потоков. Начальной точкой отсчета для динамического приоритета является значение базового приоритета потока. Значение динамического приоритета потока ограничено снизу его базовым приоритетом, верхней же границей является нижняя граница диапазона приоритетов реального времени.
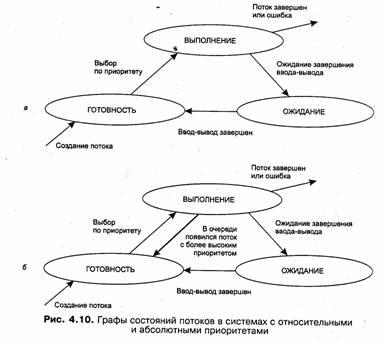
Существуют две разновидности приоритетного планирования: обслуживание с относительными приоритетами и обслуживание с абсолютными приоритетами.
В обоих случаях выбор потока на выполнение из очереди готовых осуществляется одинаково: выбирается поток, имеющий наивысший приоритет. Однако проблема определения момента смены активного потока решается по-разному. В системах с относительными приоритетами активный поток выполняется до тех пор, пока он сам не покинет процессор, перейдя в состояние ожидания (или же произойдет ошибка, или поток завершится). На рис. 4.10, а показан граф состояний потока в системе с относительными приоритетами.
В системах с абсолютными приоритетами выполнение активного потока прерывается кроме указанных выше причин, еще при одном условии: если в очереди готовых потоков появился поток, приоритет которого выше приоритета активного потока. В этом случае прерванный поток переходит в состояние готовности
(рис. 4.10, б).
В системах, в которых планирование осуществляется на основе относительных приоритетов, минимизируются затраты на переключения процессора с одной работы на другую. С другой стороны, здесь могут возникать ситуации, когда одна задача занимает процессор долгое время. Ясно, что для систем разделения времени и реального времени такая дисциплина обслуживания не подходит: интерактивное приложение может ждать своей очереди часами, пока вычислительной
задаче не потребуется ввод-вывод. А вот в системах пакетной обработки (в том числе известной ОС OS/360) относительные приоритеты используются широко.
В системах с абсолютными приоритетами время ожидания потока в очередях может быть сведено к минимуму, если ему назначить самый высокий приоритет. Такой поток будет вытеснять из процессора все остальные потоки (кроме потоков, имеющих такой же наивысший приоритет). Это делает планирование на основе абсолютных приоритетов подходящим для систем управления объектами, в которых важна быстрая реакция на событие.
Смешанные алгоритмы планирования
Во многих операционных системах алгоритмы планирования построены с использованием как концепции квантования, так и приоритетов. Например, в основе планирования лежит квантование, но величина кванта и/или порядок выбора потока из очереди готовых определяется приоритетами потоков. Именно так реализовано планирование в системе Windows NT, в которой квантование сочетается с динамическими абсолютными приоритетами. На выполнение выбирается готовый поток с наивысшим приоритетом. Ему выделяется квант времени. Если во время выполнения в очереди готовых появляется поток с более высоким приоритетом, то он вытесняет выполняемый поток. Вытесненный поток возвращается в очередь готовых, причем он становится впереди всех остальных потоков имеющих такой же приоритет.
Рассмотрим более подробно алгоритм планирования в операционной системе UNIX System V Release 4. В этой ОС понятие «поток» отсутствует, и планирование осуществляется на уровне процессов. В системе UNIX System V Release 4 реализована вытесняющая многозадачность, основанная на использовании приоритетов и квантования.
Каждый процесс в зависимости от задачи, которую он решает, относится к одному из трех определенных в системе приоритетных классов: классу реального времени, классу системных процессов или классу процессов разделения времени. Назначение и обработка приоритетов выполняются для разных классов по-разному. Процессы системного класса, зарезервированные для ядра, используют стратегию фиксированных приоритетов. Уровень приоритета процессу назначается ядром и никогда не изменяется.
Процессы реального времени также используют стратегию фиксированных приоритетов, но пользователь может их изменять. Так как при наличии готовых к выполнению процессов реального времени другие процессы не рассматриваются, то процессы реального времени надо тщательно проектировать, чтобы они не захватывали процессор на слишком долгое время. Характеристики планирования процессов реального времени включают две величины: уровень глобального приоритета и квант времени. Для каждого уровня приоритета по умолчанию имеется своя величина кванта времени. Процессу разрешается захватывать процессор на указанный квант времени, а по его истечении планировщик снимает процесс с выполнения.
Процессы разделения времени были до появления UNIX System V Release 4 единственным классом процессов, и по умолчанию UNIX System V Release 4 назначает новому процессу именно этот класс. Состав класса процессов разделения времени наиболее неопределенный и часто меняющийся в отличие от системных процессов и процессов реального времени. Для справедливого распределения времени процессора между процессами в этом классе используется стратегия динамических приоритетов. Величина приоритета, назначаемого процессам разделения времени, вычисляется пропорционально значениям двух составляющих: пользовательской части и системной части. Пользовательская часть приоритета может быть изменена администратором и владельцем процесса, но в последнем случае только в сторону его снижения.
Системная составляющая позволяет планировщику управлять процессами в зависимости от того, как долго они занимают процессор, не уходя в состояние ожидания. У тех процессов, которые потребляют большие периоды процессорного времени без ухода в состояние ожидания, приоритет снижается, а у тех процессов, которые часто уходят в состояние ожидания после короткого периода использования процессора, приоритет повышается. Таким образом, процессам, ведущим себя не «по-джентльменски», дается низкий приоритет. Это означает, что они реже выбираются для выполнения. Это ущемление в правах компенсируется тем, что процессам с низким приоритетом даются большие кванты времени, чем процессам с высокими приоритетами. Таким образом, хотя низкоприоритетный процесс и не работает так часто, как высокоприоритетный, но зато, когда он наконец выбирается для выполнения, ему отводится больше времени,
Другой пример относится к операционной системе OS/2. Планирование здесь основано на использовании квантования и абсолютных динамических приоритетов. На множестве потоков определены приоритетные классы — критический (time critical), серверный (server), стандартный (regular) и остаточный (idle), в каждом из которых имеется 32 приоритетных уровня. Потоки критического класса имеют наивысший приоритет. В этот класс могут быть отнесены, например, системные потоки, выполняющие задачи управления сетью. Следующий по приоритетности класс предназначен, как это следует из его названия, для потоков, обслуживающих серверные приложения. К стандартному классу могут быть отнесены потоки обычных приложений. Потоки, входящие в остаточный класс, имеют самый низкий приоритет. К этому классу относится, например, поток, выводящий на экран заставку, когда в системе не выполняется никакой работы.
Поток из менее приоритетного класса не может быть выбран для выполнения, пока в очереди более приоритетного класса имеется хотя бы один поток. Внутри каждого класса потоки выбираются также по приоритетам. Потоки, имеющие одинаковое значение приоритета, обслуживаются в циклическом порядке.
Приоритеты могут изменяться планировщиком в следующих случаях;
□ Если поток находится в ожидании процессорного времени дольше, чем это задано системной переменной MAXWAIT, то его уровень приоритета будет автоматически увеличен операционной системой. При этом результирующее значение приоритета не должно превышать нижней границы диапазона приоритетов критического класса.
□ Если поток ушел на выполнение операции ввода-вывода, то после ее завершения он получит наивысшее значение приоритета своего класса.
□ Приоритет потока автоматически повышается, когда он поступает на выполнение.
ОС динамически устанавливает величину кванта, отводимого потоку для выполнения. Величина кванта зависит от загрузки системы и интенсивности подкачки. Параметры настройки системы позволяют явно задать границы изменения кванта. В любом случае он не может быть меньше 32 мс и больше 65 536 мс. Если поток был прерван до истечения кванта, то следующий выделенный ему интервал выполнения будет увеличен на время, равное одному периоду таймера (около 32 мс), и так до тех пор, пока квант не достигнет заранее заданного при настройке ОС предела.
Благодаря такому алгоритму планирования в OS/2 ни один поток не будет «забыт» системой и получит достаточно процессорного времени.
Планирование в системах реального времени
В системах реального времени, в которых главным критерием эффективности Е является обеспечение временных характеристик вычислительного процесса, планирование имеет особое значение. Любая система реального времени должна реагировать на сигналы управляемого объекта в течение заданных временных ограничений. Необходимость тщательного планирования работ облегчается тем, f что в системах реального времени весь набор выполняемых задач известен заранее. Кроме того, часто в системе имеется информация о временах выполнения задач, моментах активизации, предельных допустимых сроках ожидания ответа и т. д. Эти данные могут быть использованы планировщиком для создания статического расписания или для построения адекватного алгоритма динамического планирования.
При разработке алгоритмов планирования для систем реального времени необходимо учитывать, какие последствия в этих системах возникают при несоблюдении временных ограничений. Если эти последствия катастрофичны, как, например, для системы управления полетами или атомной электростанцией, то операционная система реального времени, на основе которой строится управление объектом, называется жесткой (hard). Если же последствия нарушения временных ограничений не столь серьезны, то есть сравнимы с той пользой, которую приносит система управления объектом, то система является мягкой (soft) системой реального времени. Примером мягкой системы реального времени является система резервирования билетов. Если из-за временных нарушений оператору не удается зарезервировать билет, это не очень страшно — можно просто послать запрос на резервирование заново.
В жестких системах реального времени время завершения выполнения каждой из критических задач должно быть гарантировано для всех возможных сценариев работы системы. Такие гарантии могут быть даны либо в результате исчерпывающего тестирования всех возможных сценариев поведения управляемого объекта и управляющих программ, либо в результате построения статического расписания, либо в результате выбора математически обоснованного динамического алгоритма планирования. При построении расписания надо иметь в виду, что для некоторых наборов задач в принципе невозможно найти расписания, при котором бы удовлетворялись заданные временные характеристики. С целью определения возможности существования расписания могут быть использованы различные критерии. Например, в качестве простейшего критерия может служить условие, что разность между предельным сроком выполнения задачи (после появления запроса на ее выполнение) и временем ее вычисления (при условии непрерывного выполнения) всегда, должна быть положительной. Очевидно, что такой критерий является необходимым, но недостаточным. Точные критерии, гарантирующие наличие расписания, являются очень сложными в вычислительном отношении.
В мягких системах реального времени предполагается, что заданные временные ограничения могут иногда нарушаться, поэтому здесь обычно применяются менее затратные способы планирования.
ПРИМЕЧАНИЕ ---------------------------------------------------------------------------------------------
При рассмотрении в качестве примеров подсистем планирования потоков/процессов в
операционных системах Windows NT, OS/2 и UNIX System V Release 4 было отмечено,
что во всех этих системах имеется приоритетный класс реального времени. Для пота- ков/процессов, относящихся к этому классу, каждая из вышеназванных систем не гарантирует выполнение заданных временных ограничений, а лишь обеспечивает предпочтение в скорости обслуживания. Следовательно, эти ОС могут быть основой для построения мягких систем реального времени, но непригодны для жестких систем реального времени.
---------------------------------------------------------------------------------------------------------------------
В зависимости от характера возникновения запросов на выполнение задач полезно разделять их на два типа: периодические и спорадические. Начиная с момента первоначального запроса все будущие моменты запроса периодической задачи можно определить заранее путем прибавления к моменту начального запроса величины, кратной известному периоду. Времена запросов на выполнение спорадических задач заранее не известны.
Предположим, что имеется периодический набор задач {Ti} с периодами рi предельными сроками di и требованиями ко времени выполнения ci. Для проверки возможности существования расписания достаточно проанализировать расписание на периоде времени, равном по крайней мере наименьшему общему множителю периодов этих задач. Необходимым критерием существования расписания для набора периодических задач является следующее достаточно очевидное утверждение: сумма коэффициентов использования μi = Ci /pi должна быть меньше или равна k, где k — количество доступных процессоров, то есть:
![]()
При выборе алгоритма планирования следует учитывать данные о возможной зависимости задач. Эта зависимость может выступать, например, в виде ограничений на последовательность выполнения задач или их синхронизации, вызванной взаимными исключениями (запрете выполнения некоторых задач в течение определенных периодов времени).
С практической точки зрения алгоритмы планирования зависимых задач более важны, чем алгоритмы планирования независимых задач. При наличии дешевых микроконтроллеров нет смысла организовывать мультипрограммное выполнение большого количества независимых задач на одном компьютере, так как при этом значительно возрастает сложность программного обеспечения. Обычно одновременно выполняющиеся задачи должны обмениваться информацией и получать доступ к общим данным для достижения общей цели системы, то есть являются зависимыми задачами. Поэтому существование некоторого предпочтения последовательности выполнения задач или взаимного исключения — это скорее норма для систем управления реального времени, чем исключение.
Проблема планирования зависимых задач очень сложна, нахождение ее оптимального решения требует больших вычислительных ресурсов, сравнимых с теми, которые требуются для собственно выполнения задач управления. Решение этой проблемы возможно за счет следующих мер:
□ Разделение проблемы планирования на две части, чтобы одна часть выполнялась заранее, перед запуском системы, а вторая, более простая часть — во время работы системы. Предварительный анализ набора задач с взаимными
исключениями может состоять, например, в выявлении так называемых запрещенных областей времени, в течение которых нельзя назначать выполнение задач, содержащих критические секции.
□ Введение ограничивающих предположений о поведении набора задач.
При таком подходе планирование приближается к статическому.
Возвращаясь к планированию независимых задач, рассмотрим классический алгоритм для жестких систем реального времени с одним процессором, разработанный в 1973 году Лью (Liu) и Лейландом (Layland). Алгоритм является динамическим, то есть он использует вытесняющую многозадачность и основан на относительных статических (неизменяемых в течение жизни задачи) приоритетах.
Алгоритм основан на следующих предположениях:
□ Запросы на выполнение всех задач набора, имеющих жесткие ограничения на время реакции, являются периодическими.
□ Все задачи независимы. Между любой парой задач не существует никаких ограничений на предшествование или на взаимное исключение.
□ Срок выполнения каждой задачи равен ее периоду pi.
□ Максимальное время выполнения каждой задачи сi известно и постоянно.
□ Время переключения контекста можно игнорировать.
□ Максимальный суммарный коэффициент загрузки процессора 2 Σ ci/pi при существовании n задач не превосходит n (21/n - 1). Эта величина при стремлении n к бесконечности приблизительно равна n 2, то есть 0,7.
Суть алгоритма состоит в том, что всем задачам назначаются статические приоритеты в соответствии с величиной их периодов выполнения. Задача с самым коротким периодом получает наивысший приоритет, а задача с наибольшим периодом выполнения получает наименьший приоритет. При соблюдении всех ограничений этот алгоритм гарантирует выполнение временных ограничений для всех задач во всех ситуациях.
Если же периоды повторения задач кратны периоду выполнения самой короткой задачи, то требование к максимальному коэффициенту загрузки процессора смягчается — он может доходить до 1.
Существуют также алгоритмы с динамическим изменением приоритетов, которые назначаются в соответствии с такими текущими параметрами задачи как, например, конечный срок выполнения (deadline). При необходимости назначения некоторой задачи на выполнение выбирается та, у которой текущее значение разницы между конечным сроком выполнения и временем, требуемым для ее непрерывного выполнения, является наименьшим.
Для реализации алгоритма планирования ОС должна получать управление всякий раз, когда в системе происходит событие, требующее перераспределения
процессорного времени. К таким событиям могут быть отнесены следующие:
□ Прерывание от таймера, сигнализирующее, что время, отведенное активной задаче на выполнение, закончилось. Планировщик переводит задачу в состояние готовности и выполняет перепланирование.
□ Активная задача выполнила системный вызов, связанный с запросом на ввод- вывод или на доступ к ресурсу, который в настоящий момент занят (например, файл данных). Планировщик переводит задачу в состояние ожидания и выполняет перепланирование.
□ Активная задача выполнила системный вызов, связанный с освобождением ресурса. Планировщик проверяет, не ожидает ли этот ресурс какая-либо задача. Если да, то эта задача переводится из состояния ожидания в состояние готовности. При этом, возможно, что задача, которая получила ресурс, имеет более высокий приоритет, чем текущая активная задача. После перепланирования более приоритетная задача получает доступ к процессору, вытесняя текущую задачу.
□ Внешнее (аппаратное) прерывание которое сигнализирует о завершении периферийным устройством операции ввода-вывода, переводит соответствующую задачу в очередь готовых, и выполняется планирование.
□ Внутреннее прерывание сигнализирует об ошибке, которая произошла в результате выполнения активной задачи. Планировщик снимает задачу и выполняет перепланирование.
При возникновении каждого из этих событий планировщик выполняет просмотр
очередей и решает вопрос о том, какая задача будет выполняться следующей.
Помимо указанных существует и ряд других событий (часто связанных с системными вызовами), требующих перепланировки. Например, запросы приложений и пользователей на создание новой задачи или повышение приоритета уже существующей задачи создают новую ситуацию, которая требует пересмотра очередей и, возможно, переключения процессора.
На рис. 4.11 показан фрагмент временной диаграммы работы планировщика в системе, где одновременно выполняются четыре потока. В данном случае неважно, по какому правилу выбираются потоки на выполнение и каким образом из 3 меняются их приоритеты. Существенное значение имеют лишь события, вызывающие активизацию планировщика.
Первые четыре цикла работы планировщика, приведенные на рисунке, были инициированы прерываниями от таймера по истечении квантов времени (эти события обозначены на рисунке как Т).
Следующая передача управления планировщику была осуществлена в результате выполнения потоком 3 системного запроса на ввод-вывод (событие I/O). Планировщик перевел этот поток в состояние ожидания, а затем переключил процессор на поток 2. Поток 2 полностью использовал свой квант, произошло прерывание от таймера, и планировщик активизировал поток .
При выполнении потока произошло событие R — системный вызов, в результате которого освободился некоторый ресурс (например, был закрыт файл). Это
событие вызвало перепланировку потоков. Планировщик просмотрел очередь ожидающих потоков и обнаружил, что поток 4 ждет освобождения данного ресурса. Этот поток был переведен в состояние готовности, но поскольку приоритет выполняющегося в данный момент потока 1 выше приоритета потока 4, планировщик вернул процессор потоку 1.

В следующем цикле работы планировщик активизировал поток 4, а затем, после истечения кванта и сигнала от таймера, управление получил поток 2. Этот поток не успел использовать свой квант, так как был снят с выполнения в результате возникшей ошибки (событие ER).
Далее планировщик предоставлял процессорное время потокам 1, 4 и снова 1. Во время выполнения потока 1 произошло прерывание S от внешнего устройства, сигнализирующее о том, что операция передачи данных завершена. Это событие активизировало работу планировщика, в результате которой поток 3, ожидавший завершения ввода-вывода, вытеснил поток 1, так как имел в этот момент более высокий приоритет.
Последний показанный на диаграмме период выполнения потока 1 прерывался . несколько раз. Вначале это было прерывание от внешнего устройства (S), затем программное прерывание (R), вызвавшее освобождение ресурса, и, наконец, прерывание от таймера (Т). Каждое из этих трех прерываний вызвало перепланировку потоков. В двух первых случаях планировщик оставил выполняться поток 1, так как в очереди не оказалось более приоритетных потоков, а квант времени, выделенный потоку 1, еще не был исчерпан. Переключение потоков было выполнено только по прерыванию от таймера.
В системах реального времени для отработки статического расписания планировщик активизируется по прерываниям от таймера. Эти прерывания пронизывают всю временную ось, возникая через короткие постоянные интервалы времени. После каждого прерывания планировщик просматривает расписание и проверяет, не пора ли переключить задачи. Кроме прерываний от таймера в системах реального времени перепланирование задач может происходить по прерываниям от внешних устройств — различного вида датчиков и исполнительных механизмов.
Мультипрограммирование на основе прерываний
Прерывания являются основной движущей силой любой операционной системы. Отключите систему прерываний — и «жизнь» в операционной системе немедленно остановится. Периодические прерывания от таймера вызывают смену процессов в мультипрограммной ОС, а прерывания от устройств ввода-вывода управляют потоками данных, которыми вычислительная система обменивается с внешним миром.
Как верно было замечено: «Прерывания названы так весьма удачно, поскольку они прерывают нормальную работу системы». Другими словами, система прерываний переводит процессор на выполнение потока команд, отличного от того, который выполнялся до сих пор, с последующим возвратом к исходному коду. Из сказанного можно сделать вывод о том, что механизм прерываний очень похож на механизм выполнения процедур. Это на самом деле так, хотя между этими механизмами имеется важное отличие. Переключение по прерыванию отличается от переключения, которое происходит по команде безусловного или условного перехода, предусмотренной программистом в потоке команд приложения. Переход по команде происходит в заранее определенных программистом точках программы в зависимости от исходных данных, обрабатываемых программой. Прерывание же происходит в произвольной точке потока команд программы, которую программист не может прогнозировать. Прерывание возникает либо в зависимости от внешних по отношению к процессу выполнения программы событий, либо при появлении непредвиденных аварийных ситуаций в процессе выполнения данной программы. Сходство же прерываний с процедурами состоит в том, что в обоих случаях выполняется некоторая подпрограмма, обрабатывающая специальную ситуацию, а затем продолжается выполнение основной ветви программы.
В зависимости от источника прерывания делятся на три больших класса:
□ внешние;
□ внутренние;
□ программные.
Внешние прерывания могут возникать в результате действий пользователя или оператора за терминалом, или же в результате поступления сигналов от аппаратных устройств — сигналов завершения операций ввода-вывода, вырабатываемых контроллерами внешних устройств компьютера, такими как принтер или накопитель на жестких дисках, или же сигналов от датчиков управляемых компьютером технических объектов. Внешние прерывания называют также аппаратными, отражая тот факт, что прерывание возникает вследствие подачи некоторой аппаратурой (например, контроллером принтера) электрического сигнала, который
передается (возможно, проходя через другие блоки компьютера, например контроллер прерываний) на специальный вход прерывания процессора. Данный класс прерываний является асинхронным по отношению к потоку инструкций прерываемой программы. Аппаратура процессора работает так, что асинхронные прерывания возникают между выполнением двух соседних инструкций, при этом система после обработки прерывания продолжает выполнение процесса, уже начиная со следующей инструкции.
Внутренние прерывания, называемые также исключениями (exeption), происходят синхронно выполнению программы при появлении аварийной ситуации в ходе исполнения некоторой инструкции программы. Примерами исключений являются деление на нуль, ошибки защиты памяти, обращения по несуществующему адресу, попытка выполнить привилегированную инструкцию в пользовательском режиме и т. п. Исключения возникают непосредственно в ходе выполнения тактов команды («внутри» выполнения).
Программные прерывания отличаются от предыдущих двух классов тем, что они
по своей сути не являются «истинными» прерываниями. Программное прерывание возникает при выполнении особой команды процессора, выполнение которой имитирует прерывание, то есть переход на новую последовательность инструкций. Причины использования программных прерываний вместо обычных инструкций вызова процедур будут изложены ниже, после рассмотрения механизма прерываний.
Прерываниям приписывается приоритет, с помощью которого они ранжируются по степени важности и срочности. О прерываниях, имеющих одинаковое значение приоритета, говорят, что они относятся к одному уровню приоритета прерываний.
Прерывания обычно обрабатываются модулями операционной системы, так как действия, выполняемые по прерыванию, относятся к управлению разделяемыми ресурсами вычислительной системы — принтером, диском, таймером, процессором и т. п. Процедуры, вызываемые по прерываниям, обычно называют обработчиками прерываний, или процедурами обслуживания прерываний (Interrupt Service Routine, ISR). Аппаратные прерывания обрабатываются драйверами соответствующих внешних устройств, исключения — специальными модулями ядра, а программные прерывания — процедурами ОС, обслуживающими системные вызовы. Кроме этих модулей в операционной системе может находиться так называемый диспетчер прерываний, который координирует работу отдельных обработчиков прерываний.
Механизм прерываний поддерживается аппаратными средствами компьютера и программными средствами операционной системы. Аппаратная поддержка прерываний имеет свои особенности, зависящие от типа процессора и других аппаратных компонентов, передающих сигнал запроса прерывания от внешнего устройства к процессору (таких, как контроллер внешнего устройства, шины подключения внешних устройств, контроллер прерываний, являющийся посредником между сигналами шины и сигналами процессора). Особенности аппаратной peaлизации прерываний оказывают влияние на средства программной поддержки прерываний, работающие в составе ОС.
Существуют два основных способа, с помощью которых шины выполняют прерывания: векторный (vectored) и опрашиваемый (polled). В обоих способах процессору предоставляется информация об уровне приоритета прерывания на шине подключения внешних устройств. В случае векторных прерываний в процессор передается также информация о начальном адресе программы обработки возникшего прерывания — обработчика прерываний.
Устройствам, которые используют векторные прерывания, назначается вектор прерываний. Он представляет собой электрический сигнал, выставляемый на соответствующие шины процессора и несущий в себе информацию об определенном, закрепленном за данным устройством номере, который идентифицирует со- | ответствующий обработчик прерываний. Этот вектор может быть фиксированным, конфигурируемым (например, с использованием переключателей) или программируемым. Операционная система может предусматривать процедуру регистрации вектора обработки прерываний для определенного устройства, которая связывает некоторую подпрограмму обработки прерываний с определенным вектором. При получении сигнала запроса прерывания процессор выполняет специальный цикл подтверждения прерывания, в котором устройство должно идентифицировать себя. В течение этого цикла устройство отвечает, выставляя на шину вектор прерываний. Затем процессор использует этот вектор для нахождения обработчика данного прерывания. Примером шины подключения внешних устройств, которая поддерживает векторные прерывания, является шина VMEbus.
При использовании опрашиваемых прерываний процессор получает от запросившего прерывание устройства только информацию об уровне приоритета прерывания (например, номере IRQ на шине ISA или номере IPL на шине SBus компьютеров SPARC). С каждым уровнем прерываний может быть связано несколько устройств и соответственно несколько программ — обработчиков прерываний. При возникновении прерывания процессор должен определить, какое устройство из тех, которые связаны с данным уровнем прерываний, действительно запросило прерывание. Это достигается вызовом всех обработчиков прерываний для данного уровня приоритета, пока один из обработчиков не подтвердит, что прерывание пришло от обслуживаемого им устройства. Если же с каждым уровнем прерываний связано только одно устройство, то определение нужной программы обработки прерывания происходит немедленно, как и при векторном прерывании, Опрашиваемые прерывания поддерживают шины ISA, EISA, MCA, PCI и Sbus.
Механизм прерываний некоторой аппаратной платформы может сочетать векторный и опрашиваемый типы прерываний. Типичным примером такой реализации является платформа персональных компьютеров на основе процессоров Intel Pentium. Шины PCI, ISA, EISA или MCA, используемые в этой платформе в качестве шин подключения внешних устройств, поддерживают механизм опрашиваемых прерываний. Контроллеры периферийных устройств выставляют на шину не вектор, а сигнал запроса прерывания определенного уровня IRQ. Однако в процессоре Pentium система прерываний является векторной. Вектор прерываний в процессор Pentium поставляет контроллер прерываний, который отображает поступающий от шины сигнал IRQ на определенный номер вектора.
Вектор прерываний, передаваемый в процессор, представляет собой целое число в диапазоне от 0 до 255, указывающее на одну из 256 программ обработки прерываний, адреса которых хранятся в таблице обработчиков прерываний. В том случае, когда к каждой линии IRQ, подключается только одно устройство, процедура обработки прерываний работает так, как если бы система прерываний была чисто векторной, то есть процедура не выполняет никаких дополнительных опросов для выяснения того, какое именно устройство запросило прерывание. Однако при совместном использовании одного уровня IRQ несколькими устройствами программа обработки прерываний должна работать в соответствии со схемой опрашиваемых прерываний, то есть дополнительно выполнить опрос всех устройств, подключенных к данному уровню IRQ,.
Механизм прерываний чаще всего поддерживает приоритезацию и маскирование прерываний. Приоритезация означает, что все источники прерываний делятся на классы и каждому классу назначается свой уровень приоритета запроса на прерывание. Приоритеты могут обслуживаться как относительные и абсолютные. Обслуживание запросов прерываний по схеме с относительными приоритетами заключается в том, что при одновременном поступлении запросов прерываний из разных классов выбирается запрос, имеющий высший приоритет. Однако в дальнейшем при обслуживании этого запроса процедура обработки прерывания уже не откладывается даже в том случае, когда появляются более приоритетные запросы — решение о выборе нового запроса принимается только в момент завершения обслуживания очередного прерывания. Если же более приоритетным прерываниям разрешается приостанавливать работу процедур обслуживания менее приоритетных прерываний, то это означает, что работает схема приоритезации с абсолютными приоритетами.
Если процессор (или компьютер, когда поддержка приоритезации прерываний вынесена во внешний по отношению к процессору блок) работает по схеме с абсолютными приоритетами, то он поддерживает в одном из своих внутренних регистров переменную, фиксирующую уровень приоритета обслуживаемого в данный момент прерывания. При поступлении запроса из определенного класса его приоритет сравнивается с текущим приоритетом процессора, и если приоритет запроса выше, то текущая процедура обработки прерываний вытесняется, а по завершении обслуживания нового прерывания происходит возврат к прерванной процедуре.
Упорядоченное обслуживание запросов прерываний наряду со схемами приоритетной обработки запросов может выполняться механизмом маскирования запросов. Собственно говоря, в описанной схеме абсолютных приоритетов выполняется маскирование — при обслуживании некоторого запроса все запросы с равным или более низким приоритетом маскируются, до есть не обслуживаются. Схема маскирования предполагает возможность временного маскирования прерываний любого класса независимо от уровня приоритета.
Обобщенно последовательность действий аппаратных и программных средств по обработке прерывания можно описать следующим образом.
- При возникновении сигнала (для аппаратных прерываний) или условия (для внутренних прерываний) прерывания происходит первичное аппаратное
распознавание типа прерывания. Если прерывания данного типа в настоящий < момент запрещены (приоритетной схемой или механизмом маскирования), то процессор продолжает поддерживать естественный ход выполнения команд, В противном случае в зависимости от поступившей в процессор информации (уровень прерывания, вектор прерывания или тип условия внутреннего прерывания) происходит автоматический вызов процедуры обработки. прерывания, адрес которой находится в специальной таблице операционной системы, размещаемой либо в регистрах процессора, либо в определенном месте оперативной памяти.
2. Автоматически сохраняется некоторая часть контекста прерванного потока, которая позволит ядру возобновить исполнение потока процесса после обработки прерывания. В это подмножество обычно включаются значения счетчика команд, слова состояния машины, хранящего признаки основных режимов работы процессора (пример такого слова — регистр EFLAGS в Intel Pentium), а также, нескольких регистров общего назначения, которые требуются программе обработки прерывания. Может быть сохранен и полный контекст процесса, если ОС обслуживает данное прерывание со сменой процесса. Однако в общем случае это не обязательно, часто обработка прерываний выполняется без вытеснения текущего процесса.
3. Одновременно с загрузкой адреса процедуры обработки прерываний в счетчик команд может автоматически выполняться загрузка нового значения слова состояния машины (или другой системной структуры, например селектора кодового сегмента в процессоре Pentium), которое определяет режимы работы процессора при обработке прерывания, в том числе работу в привилегированном режиме. В некоторых моделях процессоров переход в привилегированный режим за счет смены состояния машины при обработке прерывания является единственным способом смены режима. Прерывания практически во всех мультипрограммных ОС обрабатываются в привилегированном режиме модулями ядра, так как при этом обычно нужно выполнить ряд критических операций, от которых зависит жизнеспособность системы, — управлять внешними устройствами, перепланировать потоки и т. п.
4. Временно запрещаются прерывания данного типа, чтобы не образовалась очередь вложенных друг в друга потоков одной и той же процедуры. Детали выполнения этой операции зависят от особенностей аппаратной платформы, например может использоваться механизм маскирования прерываний. Многие процессоры автоматически устанавливают признак запрета прерываний в начале цикла обработки прерывания, в противном случае это делает программа обработки прерываний.
5. После того как прерывание обработано ядром операционной системы, прерванный контекст восстанавливается и работа потока возобновляется с прерванного места. Часть контекста восстанавливается аппаратно по команде возврата из прерываний (например, адрес следующей команды и слово состояния машины), а часть — программным способом, с помощью явных команд извлечения данных из стека. При возврате из прерывания блокировка повторных прерываний данного типа снимается.
Программное прерывание реализует один из способов перехода на подпрограмму с помощью специальной инструкции процессора, такой как INT в процессорах Intel Pentium, trap в процессорах Motorola, syscail в процессорах MIPS или Ticc в процессорах SPARC. При выполнении команды программного прерывания процессор отрабатывает ту же последовательность действий, что и при возникновении внешнего или внутреннего прерывания, но только происходит это в предсказуемой точке программы — там, где программист поместил данную команду.
Практически все современные процессоры имеют в системе команд инструкции программных прерываний. Одной из причин появления инструкций программных прерываний в системе команд процессоров является то, что их использование часто приводит к более компактному коду программ по сравнению с использованием стандартных команд выполнения процедур. Это объясняется тем, что разработчики процессора обычно резервируют для обработки прерываний небольшое число возможных подпрограмм, так что длина операнда в команде программного прерывания, который указывает на нужную подпрограмму, меньше, чем в команде перехода на подпрограмму. Например, в процессоре х86 предусмотрена возможность применения 256 программ обработки прерываний, поэтому в инструкции INT операнд имеет длину в один байт (а инструкция INT 3, которая предназначена для вызова отладчика, вся имеет длину один байт). Значение операнда команды INT просто является индексом в таблице из 256 адресов подпрограмм обработки прерываний, один из которых и используется для перехода по команде INT. При использовании команды CALL потребовался бы уже не однобайтовый, а двух- или четырехбайтовый операнд. Другой причиной применения программных прерываний вместо обычных инструкций вызова подпрограмм является возможность смены пользовательского режима на привилегированный одновременно с вызовом процедуры — это свойство программных прерываний поддерживается большинством процессоров.
В результате программные прерывания часто используются для выполнения ограниченного количества вызовов функций ядра операционной системы, то есть системных вызовов.
Диспетчеризация и приоритезация прерываний в ОС
Операционная система должна играть активную роль в организации обработки прерываний. Прерывания выполняют очень полезную для вычислительной сие-
темы функцию — они позволяют реагировать на асинхронные по отношению к вычислительному процессу события. В то же время прерывания создают дополнительные трудности для ОС в организации вычислительного процесса. Эти трудности связаны с непредвиденными переходами управления от одной процедуры к другой, возникающими в результате прерываний от контроллеров внешних устройств. Возможно также возникновение в непредвиденные моменты времени исключений, связанных с ошибками во время выполнения инструкций. Усложняют задачу планирования вычислительных работ и запросы на выполнение системных функций (системные вызовы) от пользовательских приложений, выполняемые с помощью программных прерываний. Сами модули ОС также часто вызывают друг друга с помощью программных прерываний, еще больше запутывая картину вычислительного процесса.
Операционная система не может терять контроль над ходом выполнения системных процедур, вызываемых по прерываниям. Она должна упорядочивать их во времени так же, как планировщик упорядочивает многочисленные пользовательские потоки. Кроме того, сам планировщик потоков является системной процедурой, вызываемой по прерываниям (аппаратным — от таймера или контроллера устройства ввода-вывода, или программным — от приложения или модуля ОС). Поэтому правильное планирование процедур, вызываемых по прерываниям, является необходимым условием правильного планирования пользовательских потоков. В противном случае в системе могут возникать, например, такие ситуации, когда операционная система будет длительное время заниматься не требующей мгновенной реакции задачей управления стримером, архивирующим данные, в то время, когда высокоскоростной диск будет простаивать и тормозить работу многочисленных приложений, обменивающихся данными с этим диском. Еще один пример такой ситуации иллюстрирует рис. 4.12. В данном случае обработчик прерываний принтера блокирует на длительное время обработку прерывания от таймера, в результате чего системное время на некоторое время «замирает» и поток 2, критически важный для пользователя, не получает управление в запланированное время. Остроту проблемы несколько смягчает то обстоятельство, что во многих случаях обработка прерывания связана с выполнением всего нескольких операций ввода-вывода и поэтому имеет очень небольшую продолжительность. Тем не менее ОС всегда должна контролировать ситуацию и выполнять критичную работу вовремя, а не полагаться на волю случая.
Для упорядочения работы обработчиков прерываний в операционных системах применяется тот же механизм, что и для упорядочения работы пользовательских процессов — механизм приоритетных очередей. Все источники прерываний обычно делятся на несколько классов, причем каждому классу присваивается приоритет. В операционной системе выделяется программный модуль, который занимается диспетчеризацией обработчиков прерываний. Этот модуль в разных ОС называется по-разному, но для определенности будем его называть диспетчером прерываний.
При возникновении прерывания диспетчер прерываний вызывается первым. Он запрещает ненадолго все прерывания, а затем выясняет причину прерывания. После этого диспетчер сравнивает назначенный данному источнику прерывания приоритет и сравнивает его с текущим приоритетом потока команд, выполняемого процессором. В этот момент времени процессор уже может выполнять инструкции другого обработчика прерываний, также имеющего некоторый приоритет. Если приоритет нового запроса выше текущего, то выполнение текущего обработчика приостанавливается и он помещается в соответствующую очередь обработчиков прерываний. В противном случае в очередь помещается обработчик нового запроса.

ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------
Приоритет обработчиков прерываний не совпадает в общем случае с приоритетом потоков, выполняемых в обычной последовательности, определяемой планировщиком потоков. По отношению к обработчикам прерываний любой поток, который назначен на выполнение планировщиком, имеет самый низкий приоритет, так что любой запрос на прерывание всегда может прервать выполнение этого потока.
Функции централизованного диспетчера
прерываний на примере Windows NT
Некоторые процессоры или контроллеры прерываний компьютера на аппаратном уровне поддерживают приоритезацию запросов на прерывание. Например, в процессорах MIPS существует несколько уровней аппаратных запросов на прерывания и несколько уровней программных запросов. В процессоре имеется внутренняя переменная, называемая уровнем прерываний процессора. Прерывание происходит только в том случае, когда уровень запроса на прерывание выше текущего уровня прерываний процессора. Имеется также привилегированная инструкция, с помощью которой код ядра ОС может изменить уровень прерываний процессора. Необработанные запросы на прерывания должны храниться в контроллерах устройств, чтобы не потеряться и дождаться обслуживания при
снижении уровня прерывания процессора, когда он закончит выполнение более срочных работ. При работе на такого рода аппаратной платформе ОС может пользоваться встроенными в процессор средствами приоритезации прерываний для упорядочивания процесса их обработки. Однако такие средства имеются не у всех процессоров, например процессоры семейства Pentium не имеют встроенной переменной для фиксации уровня прерываний исполняемого кода — аппаратные прерывания могут быть либо полностью запрещены, либо полностью разрешены (а наиболее критичные нельзя запретить вовсе).
Для исключения зависимости от аппаратной платформы в некоторых ОС вводится собственная программная система приоритетов прерываний. Примером такой ОС может служить Windows NT.
Диспетчер прерывании Windows NT (так называемый Trap Handler) работает с программной моделью прерываний, единой для всех аппаратных платформ, поддерживаемых Windows NT. Все источники прерываний (аппаратных и программных, а также некоторых важных для системы исключений, например исключения по ошибке шины) делятся на несколько классов, и каждому классу присваивается уровень запроса прерывания — Interrupt Request Level, IRQL Этот уровень и представляет приоритет данного класса. Операционная система программным способом поддерживает внутреннюю переменную, называемую IRQL выполняемого процессором кода, которая по назначению соответствует уровню прерывания процессора. Если процессор, на котором работает ОС, поддерживает такую переменную, то она используется и IRQL выполняемого кода отображается на нее, в противном случае соответствующие функции процессора эмулируются программно.
Общая схема планирования обработки прерываний выглядит в Windows NT следующим образом. При поступлении в процессор сигнала запроса на прерывание/исключение вызывается диспетчер прерываний, который запоминает информацию об источнике прерывания и анализирует его приоритет. Если приоритет запроса ниже или равен IRQL прерванного кода, то обслуживание этого запроса откладывается и данные о запросе помещаются в соответствующую очередь запросов, после чего происходит быстрый возврат к прерванному обработчику прерываний. По завершении обработки высокоприоритетного прерывания управление возвращается диспетчеру прерываний, который просматривает очереди отложенных прерываний и выбирает из них наиболее приоритетное. При этом уровень IRQL снижается до уровня выбранного прерывания.
Если же запрос имеет более высокий приоритет, чем IRQL текущего кода, то текущий обработчик прерываний вытесняется и ставится в очередь, соответствующую его значению IRQL, а управление передается новому обработчику в соответствии с IRQL запроса. После этого уровень IRQL процессора делается равным уровню IRQL принятого на выполнение запроса.
Таким образом, запрос на прерывание принимается диспетчером прерываний всегда независимо от текущего уровня IRQL выполняемого кода, но диспетчер прерываний не передает его на обработку соответствующей процедуре обработки прерываний, а помещает в программную очередь запросов, если в данный момент выполняется более приоритетная процедура обработки прерываний. Операционная система имеет полный контроль над ситуацией, не позволяя контроллерам устройств ввода-вывода принимать решения о ходе вычислительного
процесса.
В Windows NT низший уровень IRQL соответствует обычным потокам, назначаемым на выполнение диспетчером потоков (рис. 4.13). Это является некоторым допущением, так как код потоков начинает выполняться процессором не в результате запроса на прерывание, но это допущение хорошо работает, поскольку позволяет любому «настоящему» запросу прерывать код обычного потока.
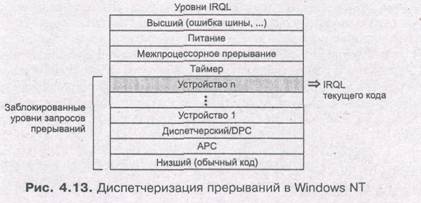
Высший уровень в иерархии IRQL отводится таким важным событиям, как исключение по ошибке шины и другим тяжелым аппаратным сбоям, далее располагаются запрос на прерывание по сбою питания и запрос на межпроцессорное прерывание.
Прерывания от внешних устройств занимают промежуточные уровни IRQL. Конкретное соотношение между приоритетами внешних устройств определяется приоритетами, задаваемыми аппаратной платформой, например уровнем IRQ шины PCI, назначенным устройству.
Особую роль в работе вычислительной системы играет системный таймер: на основании его прерываний обновляются системные часы, определяющие очередной момент вызова планировщика потоков, момент выдачи управляющего воз действия потоком реального времени и многое другое. Ввиду важности немедленной обработки прерываний от таймера, ему в Windows NT дан весьма высокий уровень приоритета — более высокий, чем уровень любого устройства ввода-вывода. В системе очередей диспетчера прерываний несколько очередей отведено для обслуживания отложенных программных прерываний. Программные прерывания, обслуживающие системные вызовы от приложений, выполняются с низшим уровнем приоритета, что соответствует концепции продолжения одного и того же процесса, но только в системной фазе, при выполнении системного вызова. А вот для программных прерываний, исходящих от модулей ядра ОС, отводится более высокий уровень запросов, имеющий двойное название «диспетчерский/DPC
Этот уровень приоритета называется диспетчерским, потому что именно в эту очередь помещаются программные запросы, вызывающие диспетчер потоков. Часто при обработке высокоприоритетных прерываний возникает ситуация, требующая перепланирования потоков. Например, при обработке очередного прерывания от таймера нужно проверить, не исчерпан ли квант, выделенный текущему потоку. Другим примером может служить обработка прерывания от контроллера диска после завершения дисковой операции, которую могут ждать несколько потоков. Во всех таких ситуациях в Window^ NT планировщик/диспетчер вызывается высокоуровневыми процедурами ядра не прямо посредством вызова процедуры, а косвенно, с помощью программного прерывания. Это дает возможность отделить короткую, но требующую быстрой реакции системы процедуру обслуживания высокоприоритетного прерывания (например, наращивание системных часов) от менее критичной операции перепланирования пользовательских потоков. Прямой вызов планировщика/диспетчера потоков такой возможности бы не дал, и критичные запросы прерывания от контроллеров устройств ввода-вывода вынуждены были бы ждать, пока отработает планировщик. При этом планировщик, возможно, выбрал бы для выполнения другой поток, если бы работал после процедур обслуживания аппаратных прерываний, так как он получил бы свежие сведения о .завершении некоторых операций ввода-вывода. Помещение вызова планировщика потоков в очередь позволяет выполнять его только в тех ситуациях, когда в системе отсутствуют ожидающие аппаратные запросы прерываний.
Наличие отдельного уровня для планировщика/диспетчера потоков не означает того, что он всегда вызывается с помощью программных прерываний. В тех случаях, когда он вызывается из кода, имеющего низкий уровень запроса на прерывание (если он выполняется, значит, высокоприоритетные запросы на прерывание отсутствуют), планировщик может быть вызван быстрее путем непосредственного внутрисегментного вызова процедуры. Например, системному вызову, переводящему поток по собственному желанию в состояние ожидания, нет смысла вызывать планировщик потоков по программному прерыванию.
Второе название диспетчерского уровня, DPC, являясь аббревиатурой от Deffered Procedure Call (вызов отложенной процедуры), говорит о том, что на этом уровне ожидают своей очереди отложенные вызовы и других процедур ОС, а не только планировщика/диспетчера. Процедуры ОС могут вызывать друг друга и непосредственно, но при многослойном построении ядра существуют более и менее приоритетные процедуры, и вызов менее приоритетных процедур из более приоритетных с помощью механизма программных прерываний позволяет, как и в случае с планировщиком, упорядочить во времени их выполнение, что оптимизирует работу ОС в целом. Примером процедур ОС, работающих на высоком приоритетном уровне, являются те части драйверов устройств ввода-вывода, которые выполняют короткие, но критичные ко времени реакции действия. В то же время существуют и другие части драйверов, которые выполняют менее срочную, но более объемную работу1. В Windows NT такие части драйверов оформляют как процедуры, вызываемые с помощью программных прерываний уровня «диспетчерский/DPO (DPC-процедуры), а само программное прерывание выполняет критичная часть драйвера. Естественно, существуют и другие модули [ ОС, оформляемые подобным образом.
Описанная программная реализация приоритетного обслуживания прерываний приводит к однотипной работе ОС Windows NT на различных аппаратных платформах, что упрощает логику работы ОС и ее перенос на новые платформы. Отрицательным следствием такого централизованного подхода является некоторое замедление обработки прерываний, так как вместо непосредственной передачи управления драйверу устройства или обработчику исключений выполняется вызов некоего посредника — диспетчера прерываний. В ОС семейства UNIX принят похожий, но менее централизованный подход к ведению и обработке, очередей прерываний. Вместо единого диспетчера прерываний его функции выполняют процедуры, обслуживающие каждый приоритетный класс прерываний. Тем не менее, общий подход к упорядочиванию обработки прерываний за счет их многоуровневой приоритезации и ведения системы очередей присутствует практически во всех современных операционных системах.
Процедуры обработки прерываний и текущий процесс
Важной особенностью процедур, выполняемых по запросам прерываний, является то, что они выполняют работу, чаще всего никак не связанную с текущим процессом. Например, драйвер диска может получить управление после того, как контроллер диска записал в соответствующие сектора информацию, полученную от процесса А но этот момент времени, скорее всего, не совпадет с периодом очередной итерации выполнения процесса А или его потока. В наиболее типичном случае процесс А будет находиться в состоянии ожидания завершения операции ввода-вывода (при синхронном режиме выполнения этой операции) и драйвер диска прервет какой-либо другой процесс, например процесс В. В Windows NT процедуры, вызываемые как DPC, также могут работать в контексте процесса, отличающегося от того, для которого они выполняют свои функции. В некоторых случаях вообще трудно однозначно определить, для какого процесса выполняет работу тот или иной программный модуль ОС, например планировщик потоков. Поэтому для такого рода процедур вводятся ограничения — они не имеют права использовать ресурсы (память, открытые файлы и т. п.), с которыми работает текущий процесс, или же от имени этого процесса запрашивать выделение дополнительных ресурсов. Процедуры обработки прерываний работают с ресурсами, которые были выделены им при инициализации соответствующего драйвера или инициализации самой операционной системы. Эти ресурсы принадлежат операционной системе, а не конкретному процессу. В частности, память выделяется драйверам из системной области, то есть той области, на которую отображаются сегменты из общей части виртуального адресного пространства всех процессов. Поэтому обычно говорят, что процедуры обработки прерываний работают вне контекста процесса. Поскольку все подобные процедуры являются частью операционной системы, ответственность за соблюдение этих ограничений несет системный программист. Заставить свои модули выполнять эти ограничения ОС не может.
Хороший пример того, что не бывает правил без исключений, предоставляет нам ОС Windows NT. В ней существуют процедуры обработки прерываний, которые выполняются всегда в контексте определенного процесса. Это процедуры, вызываемые с помощью программного прерывания АРС (Asynchronous Procedure Call, вызов асинхронной процедуры). Для них в диспетчере прерываний предусмотрен свои уровень приоритета IRQL, выше уровня для обычного кода, но ниже ) уровня DPC. Эти процедуры могут прервать текущий код и выполниться при соблюдении двух условий: текущий код имеет низший уровень приоритета (то есть выполняется обычный код), текущим процессом является вполне определенный процесс, описатель которого был задан в запросе на прерывание для данной процедуры АРС. Процедуры АРС могут пользоваться ресурсами текущего процесса, и, собственно, для этого они и были введены. Основное назначение АРС-процедур — перемещение данных, полученных драйвером от какого-либо устройства ввода-вывода, из памяти системной области памяти, куда они помещаются после считывания из регистров контроллера этого устройства, в индивидуальную часть адресного пространства процесса, запросившего операцию ввода-вывода. Такое действие постоянно выполняется системой ввода-вывода, и для его реализации были введены такие специфические процедуры обработки прерываний, как АРС.
Диспетчеризация прерываний является важной функцией ОС, и эта функция
реализована практически во всех мультипрограммных операционных системах.
Можно заметить, что в общем случае в операционной системе реализуется двухуровневый механизм планирования работ. Верхний уровень планирования выполняется диспетчером прерываний, который распределяет процессорное время между потоком поступающих запросов на прерывания различных типов — внешних, внутренних и программных. Оставшееся процессорное время распределяется другим диспетчером — диспетчером потоков, на основании дисциплин квантования и других, рассмотренных выше.
Системный вызов позволяет приложению обратиться к операционной системе с просьбой выполнить то или иное действие, оформленное как процедура (или набор процедур) кодового сегмента ОС. Для прикладного программиста операционная система выглядит как некая библиотека, предоставляющая некоторый набор полезных функций, с помощью которых можно упростить прикладную программу или выполнить действия, запрещенные в пользовательском режиме, например обмен данными с устройством ввода-вывода. Реализация системных вызовов должна удовлетворять следующим требованиям:
□ обеспечивать переключение в привилегированный режим;
□ обладать высокой скоростью вызова процедур ОС;
□ обеспечивать по возможности единообразное обращение к системным вызовам для всех аппаратных платформ, на которых работает ОС;
□ допускать легкое расширение набора системных вызовов;
□ обеспечивать контроль со стороны ОС за корректным использованием системных вызовов.
Первое требование для большинства аппаратных платформ может быть выполнено только с помощью механизма программных прерываний. Поэтому будем считать, остальные требования нужно обеспечить именно для такой реализации системных вызовов. Как это обычно бывает, некоторые из этих требований Е взаимно противоречивы.
Для обеспечения высокой скорости было бы полезно использовать векторные свойства системы программных прерываний, имеющиеся во многих процессорах, то есть закрепить за каждым системным вызовом определенное значение вектора. Приложение при таком способе вызова непосредственно указывает в аргументе запроса значение вектора, после чего управление немедленно передается требуемой процедуре операционной системы (рис. 4.14, а). Однако этот децентрализованный способ передачи управления привязан к особенностям аппарат ной платформы, а также не позволяет операционной системе легко модифицировать набор системных вызовов и контролировать их использование. Например, в процессоре Pentium количество системных вызовов определяется количеством векторов прерываний, выделенных для этой цели из общего пула в 256 элементов (часть которых используется под аппаратные прерывания и обработку исключений). Добавление нового системного вызова требует от системного программиста тщательного поиска свободного элемента в таблице прерываний, которого к тому же на каком-то этапе развития ОС может и не оказаться.
В большинстве ОС системные вызовы обслуживаются по централизованной схеме, основанной на существовании диспетчера системных вызовов (рис. 4.14, 6). . При любом системном вызове приложение выполняет программное прерывание с определенным и единственным номером вектора. Например, ОС Linux использует для системных вызовов команду INT 80h, а ОС Windows NT (при работе на платформе Pentium) — INT 2Eh. Перед выполнением программного прерывания приложение тем или иным способом передает операционной системе номер системного вызова, который является индексом в таблице адресов процедур ОС, реализующих системные вызовы (таблица sysent на рис. 4.14). Способ передачи зависит от реализации, например номер можно поместить в определенный регистр общего назначения процессора или передать через стек (в этом случае после прерывания и перехода в привилегированный режим их нужно будет скопировать в системный стек из пользовательского, это действие в некоторых процессорах автоматизировано). Также некоторым способом передаются аргументы системного вызова, они могут как помещаться в регистры общего назначения, так и передаваться через стек или массив, находящийся в оперативной памяти.
Массив удобен при большом объеме данных, передаваемых в качестве аргументов, при этом в регистре общего назначения указывается адрес этого массива.
Диспетчер системных вызовов обычно представляет собой простую программу,
которая сохраняет содержимое регистров процессора в системном стеке (поскольку
в результате программного прерывания процессор переходит в привилегированный режим), проверяет, попадает ли запрошенный номер вызова в поддерживаемый ОС диапазон (то есть не выходит ли номер за границы таблицы) и передает управление процедуре ОС, адрес которой задан в таблице адресов системных вызовов.
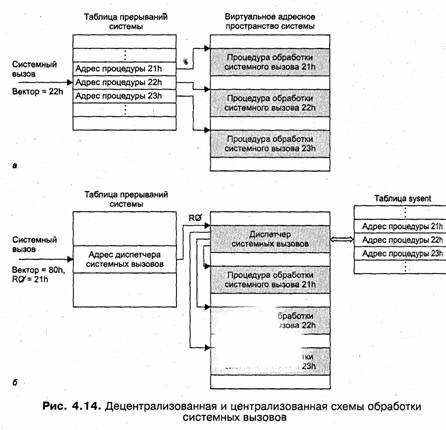
Процедура реализации системного вызова извлекает из системного стека аргументы и выполняет заданное действие. Это действие может быть весьма простым, например чтение значения системных часов, так что системный вызов оформляется в виде одной функции. Более сложные системные вызовы, такие как чтение из файла или выделение процессу дополнительного сегмента памяти, требуют обращения основной функции системного вызова к нескольким внутренним процедурам ядра ОС, принадлежащим к различным подсистемам, таким как подсистема ввода-вывода или управления памятью.
После завершения работы системного вызова управление возвращается диспетчеру, при
этом он получает также код завершения этого вызова. Диспетчер восстанавливает регистры процессора, помещает в определенный регистр код возврата
и выполняет инструкцию возврата из прерывания, которая восстанавливает непривилегированный режим работы процессора.
Для приложения системный вызов внешне ничем не отличается от вызова обычной библиотечной функции языка С, связанной (динамически или статически) с объектным кодом приложения и выполняющейся в пользовательском режиме. И такая ситуация действительно имеет место — для всех системных вызовов в библиотеках, предоставляемых компилятором С, имеются так называемые «заглушки» (в англоязычном варианте используется термин «stub» — остаток, огрызок). Каждая заглушка оформлена как С-функция, при этом она содержит несколько ассемблерных строк, нужных для выполнения инструкции программного прерывания. Таким образом, пользовательская программа вызывает заглушку, а та, в свою очередь, вызывает процедуру ОС.
Для ускорения выполнения некоторых достаточно простых системных вызовов, которым к тому же не требуется работа в привилегированном режиме, требуемая работа полностью выполняется библиотечной функцией, которую несправедливо называть в данном случае заглушкой. Более точно, такая функция не является системным вызовом, а представляет собой «чистую» библиотечную функцию, выполняющую всю свою работу в пользовательском режиме в виртуальном адресном пространстве процесса, но прикладной программист может об этом и не знать — для него системные вызовы и библиотечные функции выглядят единообразно. Прикладной программист имеет дело с набором функций прикладного программного интерфейса — API (например, Win32 или POSIX), — состоящего и из библиотечных функций, часть из которых пользуется для завершения работы системными вызовами, а часть — нет.
Описанный табличный способ организации системных вызовов принят практически во всех операционных системах. Он позволяет легко модифицировать состав системных вызовов, просто добавив в таблицу новый адрес и расширив диапазон допустимых номеров вызовов.
Операционная система может выполнять системные вызовы в синхронном или асинхронном режимах. Синхронный системный вызов означает, что процесс, сделавший такой вызов, приостанавливается (переводится планировщиком ОС в состояние ожидания) до тех пор, пока системный вызов не выполнит всю требующуюся от него работу (рис. 4.15, а). После этого планировщик переводит процесс в состояние готовности и при очередном выполнении процесс гарантированно может воспользоваться результатами завершившегося к этому времени системного вызова. Синхронные вызовы называются также блокирующими, так как вызвавший системное действие процесс блокируется до его завершения.
Асинхронный системный вызов не приводит к переводу процесса в режим ожидания после выполнения некоторых начальных системных действий, например запуска операции вывода-вывода, управление возвращается прикладному процессу (рис. 4.15, б).
Большинство системных вызовов в операционных системах являются синхронными, так как этот режим избавляет приложение от работы по выяснению момента появления результата вызова. Вместе с тем в новых версиях операционных систем количество асинхронных системных вызовов постепенно увеличивается, что дает больше свободы разработчикам сложных приложений Особенно нужны асинхронные системные вызовы в операционных системах на основе микроядерного подхода, так как при этом в пользовательском режиме работает часть ОС, которым необходимо иметь полную свободу в организации своей работы, а такую свободу дает только, асинхронный режим обслуживания вызовов микроядром.
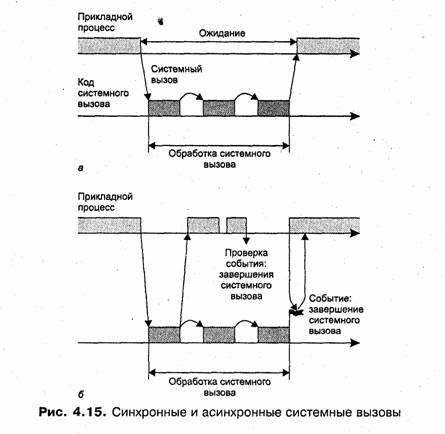
Синхронизация процессов и потоков
Существует достаточно обширный класс средств операционной системы, с помощью которых обеспечивается взаимная синхронизация процессов и потоков. Потребность в синхронизации потоков возникает только в мультипрограммной операционной системе и связана с совместным использованием аппаратных и информационных ресурсов вычислительной системы. Синхронизация необходима для исключения гонок и тупиков при обмене данными между потоками, разделении данных, при доступе к процессору и устройствам ввода-вывода.
Во многих операционных системах эти средства называются средствами межпроцессного взаимодействия — Inter Process Communications (IPC), что отражает историческую первичность понятия «процесс» по отношению к понятию «поток». Обычно к средствам IPC относят не только средства межпроцессной синхронизации но и средства межпроцессного обмена данными.
Выполнение потока в мультипрограммной среде всегда имеет асинхронный характер. Очень сложно с полной определенностью сказать, на каком этапе выполнения будет находиться процесс в определенный момент времени. Даже в однопрограммном режиме не всегда можно точно оценить время выполнения задачи. Это время во многих случаях существенно зависит от значения исходных данных, которые влияют на количество циклов, направления разветвления программы, время выполнения операций ввода-вывода и т. п. Так как исходные данные в разные моменты запуска задачи могут быть разными, то и время выполнения отдельных этапов и задачи в целом является весьма неопределенной величиной.
Еще более неопределенным является время выполнения программы в мультипрограммной системе. Моменты прерывания потоков, время нахождения их в очередях к разделяемым ресурсам, порядок выбора потоков для выполнения — все эти события являются результатом стечения многих обстоятельств и могут быть интерпретированы как случайные. В лучшем случае можно оценить вероятностные характеристики вычислительного процесса, например вероятность его завершения за данный период времени.
Таким образом, потоки в общем случае (когда программист не предпринял специальных мер по их синхронизации) протекают независимо, асинхронно друг другу. Это справедливо как по отношению к потокам одного процесса, выполняющим общий программный код, так и по отношению к потокам разных процессов, каждый из которых выполняет собственную программу.
Любое взаимодействие процессов или потоков связано с их синхронизацией, которая заключается в согласовании их скоростей путем приостановки потока До наступления некоторого события и последующей его активизации при наступлении этого события. Синхронизация лежит в основе любого взаимодействия потоков, связано ли это взаимодействие с разделением ресурсов или с обменом данными. Например, поток-получатель должен обращаться за данными только после того, как они помещены в буфер потоком-отправителем. Если же поток-получатель обратился к данным до момента их поступления в буфер, то он должен быть приостановлен.
При совместном использовании аппаратных ресурсов синхронизация также совершенно необходима. Когда, например, активному потоку требуется доступ к последовательному порту, а с этим портом в монопольном режиме работает другой поток, находящийся в данный момент в состоянии ожидания, то ОС приостанавливает активный поток и не активизирует его до тех пор, пока нужный ему порт не освободится. Часто нужна также синхронизация с событиями, внешними
по отношению к вычислительной системе, например реакции на нажатие комбинации клавиш Ctrl+C.
Ежесекундно в системе происходят сотни событий, связанных с распределением и освобождением ресурсов, и ОС должна иметь надежные и производительные средства, которые бы позволяли ей синхронизировать потоки с происходящими в системе событиями.
Для синхронизации потоков прикладных программ программист может использовать как собственные средства и приемы синхронизации, так и средства операционной системы. Например, два потока одного прикладного процесса могут координировать свою работу с помощью доступной для них обоих глобальной логической переменной, которая устанавливается в единицу при осуществлении некоторого события, например выработки одним потоком данных, нужных для продолжения работы другого. Однако во многих случаях более эффективными или даже единственно возможными являются средства синхронизации, предоставляемые операционной системой в форме системных вызовов. Так, потоки, принадлежащие разным процессам, не имеют возможности вмешиваться каким-либо образом в работу друг друга. Без посредничества операционной системы они не могут приостановить друг друга или оповестить о произошедшем событии. Средства синхронизации используются операционной системой не только для синхронизации прикладных процессов, но и для ее внутренних нужд.
Обычно разработчики операционных систем предоставляют в распоряжение прикладных и системных программистов широкий спектр средств синхронизации. Эти средства могут образовывать иерархию, когда на основе более простых средств строятся более сложные, а также быть функционально специализированными, например средства для синхронизации потоков одного процесса, средства для синхронизации потоков разных процессов при обмене данными и т. д. Часто функциональные возможности разных системных вызовов синхронизации перекрываются, так что для решения одной задачи программист может воспользоваться несколькими вызовами в зависимости от своих личных предпочтений.
Необходимость синхронизации и гонки
Пренебрежение вопросами синхронизации в многопоточной системе может привести к неправильному решению задачи или даже к краху системы. Рассмотрим, например (рис. 4.16), задачу ведения базы данных клиентов некоторого предприятия. Каждому клиенту отводится отдельная запись в базе данных, в которой среди прочих полей имеются поля Заказ и Оплата. Программа, ведущая базу данных, оформлена как единый процесс, имеющий несколько потоков, в том числе поток А, который заносит в базу данных информацию о заказах, поступивших от клиентов, и поток В, который фиксирует в базе данных сведения об оплате клиентами выставленных счетов. Оба эти потока совместно работают над общим файлом базы данных, используя однотипные алгоритмы, включающие три шага.
1. Считать из файла базы данных в буфер запись о клиенте с заданным идентификатором.
2. Внести новое значение в поле Заказ (для потока А) или Оплата (для потока В).
3. Вернуть модифицированную запись в файл базы данных.
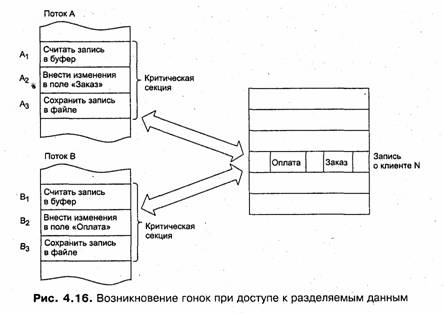
Обозначим соответствующие шаги для потока А как Al, A2 и A3, а для потока В как Bl, В2 и ВЗ. Предположим, что в некоторый момент поток А обновляет поле Заказ записи о клиенте N. Для этого он считывает эту запись, в свой буфер (шаг А1), модифицирует значение поля Заказ (шаг А2), но внести запись в базу данных (шаг A3) не успевает, так как его выполнение прерывается, например, вследствие завершения кванта времени.
Предположим также, что потоку В также потребовалось внести сведения об оплате относительно того же клиента N. Когда подходит очередь потока В, он успевает считать запись в свой буфер (шаг В1) и выполнить обновление поля Оплата (шаг В2), а затем прерывается. Заметим, что в буфере у потока В находится запись о клиенте N, в которой поле Заказ имеет прежнее, не измененное значение.
Когда в очередной раз управление будет передано потоку А, то он, продолжая свою работу, запишет запись о клиенте N с модифицированным полем Заказ в базу данных (шаг A3). После прерывания потока А и активизации потока В последний запишет в базу данных поверх только что обновленной записи о клиенте N свой вариант записи, в которой обновлено значение поля Оплата. Таким образом, в базе данных будут зафиксированы сведения о том, что клиент N произвел оплату, но информация о его заказе окажется потерянной (рис. 4.17, а).
Сложность проблемы синхронизации кроется в нерегулярности возникающих ситуаций. Так, в предыдущем примере можно представить и другое развитие событий: могла быть потеряна информация не о заказе, а об оплате (рис. 4.17, б)или, напротив, все исправления были успешно внесены (рис. 4.17, в). Все определяется взаимными скоростями потоков и моментами их прерывания. Поэтому отладка взаимодействующих потоков является сложной задачей. Ситуации, подобные той, когда два или более потоков обрабатывают разделяемые данные и конечный результат зависит ох соотношения скоростей потоков, называются гонками.

Важным понятием синхронизации потоков является понятие «критической секции» программы. Критическая секция ~ это часть программы, результат выполнения которой может непредсказуемо меняться, если переменные, относящиеся к этой части программы, изменяются другими потоками в то время, когда выполнение этой части еще не завершено. Критическая секция всегда определяется по отношению к определенным критическим данным, при несогласованном изменении которых могут возникнуть нежелательные эффекты. В предыдущем примере такими критическими данными являлись записи файла базы данных. Во всех потоках, работающих с критическими данными, должна быть определена критическая секция. Заметим, что в разных потоках критическая секция состоит в общем случае из разных последовательностей команд.
Чтобы исключить эффект гонок по отношению к критическим данным, необходимо обеспечить, чтобы в каждый момент времени в критической секции, связанной с этими данными, находился только один поток. При этом неважно, находится этот поток в активном или в приостановленном состоянии. Этот прием называют взаимным исключением. Операционная система использует разные способы реализации взаимного исключения. Некоторые способы пригодны для взаимного исключения при вхождении в критическую секцию только потоков
одного процесса, в то время как другие могут обеспечить взаимное исключение и для потоков разных процессов.
Самый простой и в то же время самый неэффективный способ обеспечения взаимного исключения состоит в том, что операционная система позволяет потоку запрещать любые прерывания на время его нахождения в критической секции. Однако этот способ практически не применяется, так как опасно доверять управление системой пользовательскому потоку — он может надолго занять процессор, а при крахе потока в критической секции крах потерпит вся система, потому что прерывания никогда не будут разрешены.
Для синхронизации потоков одного процесса прикладной программист может использовать глобальные блокирующие переменные. С этими переменными, к которым все потоки процесса имеют прямой доступ, программист работает, не обращаясь к системным вызовам ОС.
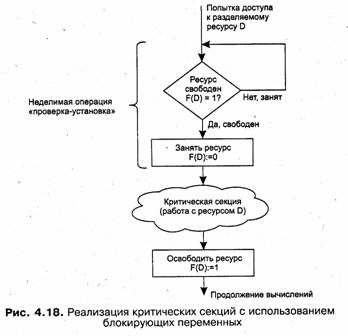
Каждому набору критических данных ставится в соответствие двоичная переменная, которой поток присваивает значение 0, когда он входит в критическую секцию, и значение 1, когда он ее покидает. На рис. 4.18 показан фрагмент алгоритма потока, использующего для реализации взаимного исключения доступа к критическим данным D блокирующую переменную F(D). Перед входом в критическую секцию поток проверяет, не работает ли уже какой-нибудь поток с данными D. Если переменная F(D) установлена в 0, то данные заняты и проверка циклически повторяется. Если же данные свободны (F(D) = 1), то значение переменной F(D) устанавливается в 0 и поток входит в критическую секцию. После того как поток выполнит все действия с данными D, значение переменной F(D) снова устанавливается равным 1.
Блокирующие переменные могут использоваться не только при доступе к разделяемым данным, но и при доступе к разделяемым ресурсам любого вида.
Если все потоки написаны с учетом вышеописанных соглашений, то взаимное исключение гарантируется. При этом потоки могут быть прерваны операционной системой в любой момент и в любом месте, в том числе в критической секции.
Однако следует заметить, что одно ограничение на прерывания все же имеется. Нельзя прерывать поток между выполнением операций проверки и установки блокирующей переменной. Поясним это. Пусть в результате проверки переменной поток определил, что ресурс свободен, но сразу после этого, не успев установить переменную в 0, был прерван. За время его приостановки другой поток занял ресурс, вошел в свою критическую секцию, но также был прерван, не завершив работы с разделяемым ресурсом. Когда управление было возвращено первому потоку, он, считая ресурс свободным, установил признак занятости и начал выполнять свою критическую секцию. Таким образом, был нарушен принцип взаимного исключения, что потенциально может привести к нежелательным последствиям. Во избежание таких ситуаций в системе команд многих компьютеров предусмотрена единая, неделимая команда анализа и присвоения значения логической переменной (например, команды ВТС, BTR и BTS процессора Pentium). При отсутствии такой команды в процессоре соответствующие действия должны реализовываться специальными системными примитивами, которые бы запрещали прерывания на протяжении всей операции проверки и установки.
Реализация взаимного исключения описанным выше способом имеет существенный недостаток: в течение времени, когда один поток находится в критической секции, другой поток, которому требуется тот же ресурс, получив доступ к процессору, будет непрерывно опрашивать блокирующую переменную, бесполезно тратя выделяемое ему процессорное время, которое могло бы быть использовано для выполнения какого-нибудь другого потока. Для устранения этого недостатка во многих ОС предусматриваются специальные системные вызовы для работы с критическими секциями.
На рис. 4.19 показано, как с помощью этих функций реализовано взаимное исключение в операционной системе Windows NT. Перед тем как начать изменение критических данных, поток выполняет системный вызов Enter Critical Section (). В рамках этого вызова сначала выполняется, как и в предыдущем случае, проверка блокирующей переменной, отражающей состояние критического ресурса. Если системный вызов определил, что ресурс занят (F(D) = 0), он в отличие от предыдущего случая не выполняет циклический опрос, а переводит поток в состояние ожидания (D) и делает отметку о том, что данный поток должен быть активизирован, когда соответствующий ресурс освободится. Поток, который в это время использует данный ресурс, после выхода из критической секции должен выполнить системную функцию Leave Critical Section (), в результате чего блокирующая переменная принимает значение, соответствующее свободному состоянию ресурса (F(D) = 1), а операционная система просматривает очередь ожидающих этот ресурс потоков и переводит первый поток из очереди в состояние готовности.

Таким образом исключается непроизводительная потеря процессорного времени на циклическую проверку освобождения занятого ресурса. Однако в тех случаях, когда объем работы в критической секции небольшой и существует высокая вероятность в очень скором доступе к разделяемому ресурсу, более предпочтительным может оказаться использование блокирующих переменных. Действительно, в такой ситуации накладные расходы ОС по реализации функции входа в критическую секцию и выхода из нее могут превысить полученную экономию.
Обобщением блокирующих переменных являются так называемые семафоры Дийкстры. Вместо двоичных переменных Дийкстра (Dijkstra) предложил использовать переменные, которые могут принимать целые неотрицательные значения. Такие переменные, используемые для синхронизации вычислительных процессов, получили название семафоров.
Для работы с семафорами вводятся два примитива, традиционно обозначаемых Р и V. Пусть переменная S представляет собой семафор. Тогда действия V(S) и P(S) определяются следующим образом.
□ V(S): переменная S увеличивается на 1 единым действием. Выборка, наращивание и запоминание не могут быть прерваны. К переменной S нет доступа другим потокам во время выполнения этой операции.
□ P(S): уменьшение S на 1, если это возможно. Если S=0 и невозможно уменьшить S, оставаясь в области целых неотрицательных значений, то в этом случае поток, вызывающий операцию Р, ждет, пока это уменьшение станет возможным. Успешная проверка и уменьшение также являются неделимой операцией.
Никакие прерывания во время выполнения примитивов V и Р недопустимы.
В частном случае, когда семафор S может принимать только значения 0 и 1, он превращается в блокирующую переменную, которую по этой причине часто называют двоичным семафором. Операция Р заключает в себе потенциальную возможность перехода потока, который ее выполняет, в состояние ожидания, в то время как операция V может при некоторых обстоятельствах активизировать другой поток, приостановленный операцией Р.
Рассмотрим использование семафоров на классическом примере взаимодействия двух выполняющихся в режиме мультипрограммирования потоков, один из которых пишет данные в буферный пул, а другой считывает их из буферного пула. Пусть буферный пул состоит из N буферов, каждый из которых может содержать одну запись. В общем случае поток-писатель и поток-читатель могут иметь различные скорости и обращаться к буферному пулу с переменой интенсивностью. В один период скорость записи может превышать скорость чтения, в другой — наоборот. Для правильной совместной работы поток-писатель должен приостанавливаться, когда все буферы оказываются занятыми, и активизироваться при освобождении хотя бы одного буфера. Напротив, поток-читатель должен приостанавливаться, когда все буферы пусты, и активизироваться при появлении хотя бы одной записи.
Введем два семафора: е — число пустых буферов, и f — число заполненных буферов, причем в исходном состоянии е = N, a f = 0. Тогда работа потоков с общим буферным пулом может быть описана следующим образом (рис. 4.20).
Поток-писатель прежде всего выполняет операцию Р(е), с помощью которой он проверяет, имеются ли в буферном пуле незаполненные буферы. В соответствии с семантикой операции Р, если семафор е равен 0 (то есть свободных буферов в данный момент нет), то поток-писатель переходит в состояние ожидания. Если же значением е является положительное число, то он уменьшает число свободных буферов, записывает данные в очередной свободный буфер и после этого наращивает число занятых буферов операцией V(f). Поток-читатель действует аналогичным образом, с той разницей, что он начинает работу с проверки наличия заполненных буферов, а после чтения данных наращивает количество свободных буферов.

В данном случае предпочтительнее использовать семафоры вместо блокирующих переменных. Действительно, критическим ресурсом здесь является буферный пул, который может быть представлен как набор идентичных ресурсов — отдельных буферов, а значит, с буферным пулом могут работать сразу несколько потоков, и именно столько, сколько буферов в нем содержится. Использование двоичной переменной не позволяет организовать доступ к критическому ресурсу более чем одному потоку. Семафор же решает задачу синхронизации более гибко, допуская к разделяемому пулу ресурсов заданное количество потоков. Так, в нашем примере с буферным пулом могут работать максимум N потоков, часть из которых может быть «писателями», а часть — «читателями».
Таким образом, семафоры позволяют эффективно решать задачу синхронизации доступа к ресурсным пулам, таким, например, как набор идентичных в функциональном назначении внешних устройств (модемов, принтеров, портов), или набор областей памяти одинаковой величины, или информационных структур. Во всех этих и подобных им случаях с помощью семафоров можно организовать доступ к разделяемым ресурсам сразу нескольких потоков.
Семафор может использоваться и в качестве блокирующей переменной. В рассмотренном выше примере, для того чтобы исключить коллизии при работе с разделяемой областью памяти, будем считать, что запись в буфер и считывание из буфера являются критическими секциями. Взаимное исключение будем обеспечивать с помощью двоичного семафора b (рис. 4.21). Оба потока после проверки доступности буферов должны выполнить проверку доступности критической секции.
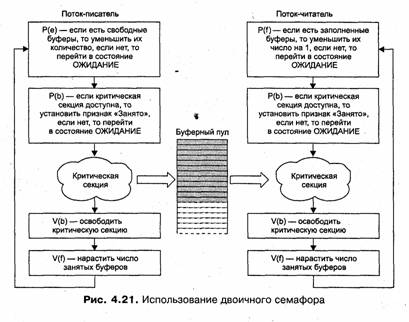
Приведенный выше пример позволяет также проиллюстрировать еще одну проблему синхронизации — взаимные блокировки, называемые также дедлоками (deadlocks), клинчами (clinch), или тупиками. Покажем, что если переставить местами операции Р(е) и Р(b) в потоке-писателе, то при некотором стечении обстоятельств эти два потока могут взаимно блокировать друг друга.
Итак, пусть поток-писатель начинает свою работу с проверки доступности критической секции — операции Р(b), и пусть он первым войдет в критическую секцию. Выполняя операцию Р(е), он может обнаружить отсутствие свободных буферов и перейти в состояние ожидания. Как уже было показано, из этого состояния его может вывести только поток-читатель, который возьмет очередную запись из буфера. Но поток-читатель не сможет этого сделать, так как для этого ему потребуется войти в критическую секцию, вход в которую заблокирован потоком-писателем. Таким образом, ни один из этих потоков не может завершить начатую работу и возникнет тупиковая ситуация, которая не может разрешиться без внешнего воздействия.
Рассмотрим еще один пример тупика. Пусть двум потокам, принадлежащим разным процессам и выполняющимся в режиме мультипрограммирования, для выполнения их работы нужно два ресурса, например принтер и последовательный порт. Такая ситуация может возникнуть, например, во время работы приложения, задачей которого является распечатка информации, поступающей по модемной связи.
На рис. 4.22, а показаны фрагменты соответствующих программ. Поток А запрашивает сначала принтер, а затем порт, а поток В запрашивает устройства в обратном порядке. Предположим, что после того, как ОС назначила принтер потоку А и установила связанную с этим ресурсом блокирующую переменную, поток А был прерван. Управление получил поток В, который сначала выполнил запрос на получение СОМ-порта, затем при выполнении следующей команды был заблокирован, так как принтер оказался уже занятым потоком А. Управление снова получил поток А, который в соответствии со своей программой сделал попытку занять порт и был заблокирован, поскольку порт уже выделен потоку В. В таком положении потоки А и В могут находиться сколь угодно долго.
В зависимости от соотношения скоростей потоков они могут либо взаимно блокировать друг друга (рис. 4.22, б), либо образовывать очереди к разделяемым ресурсам (рис. 4.22, в), либо совершенно независимо использовать разделяемые ресурсы (рис. 4.22, г).

ПРИМЕЧАНИЕ ----------------------------------------------------------------------------------------------
Тупиковые ситуации надо отличать от простых очередей, хотя те и другие возникают при совместном использовании ресурсов и внешне выглядят похоже: поток приостанавливается и ждет освобождения ресурса. Однако очередь — это нормальное явление, неотъемлемый признак высокого коэффициента использования ресурсов при случайном поступлении запросов. Очередь появляется тогда, когда ресурс недоступен в данный момент, но освободится через некоторое время, позволив потоку продолжить выполнение. Тупик же, что видно из его названия, является в некотором роде неразрешимой ситуацией. Необходимым условием возникновения тупика является потребность потока сразу в нескольких ресурсах.
В рассмотренных примерах тупик был образован двумя потоками, но взаимно блокировать друг друга может и большее число потоков. На рис. 2.23 показано такое распределение ресурсов Ri между несколькими потоками Tj, которое привело к возникновению взаимных блокировок. Стрелки обозначают потребность потока в ресурсах. Сплошная стрелка означает, что соответствующий ресурс был выделен потоку, а пунктирная стрелка соединяет поток с тем ресурсом, который необходим, но не может быть пока выделен, поскольку занят другим потоком. Например, потоку Т1 для выполнения работы необходимы ресурсы R1 и R2, из которых выделен только один — R1, а ресурс R2 удерживается потоком Т2. Ни один из четырех показанных на рисунке потоков не может продолжить свою работу, так как не имеет всех необходимых для этого ресурсов.
Невозможность потоков завершить начатую работу из-за возникновения взаимных блокировок снижает производительность вычислительной системы. Поэтому проблеме предотвращения тупиков уделяется большое внимание. На тот случай, когда взаимная блокировка все же возникает, система должна предоставить администратору-оператору средства, с помощью которых он смог бы распознать тупик, отличить его от обычной блокировки из-за временной недоступности ресурсов. И наконец, если тупик диагностирован, то нужны средства для снятия взаимных блокировок и восстановления нормального вычислительного процесса.

Тупики могут быть предотвращены на стадии написания программ, то есть программы должны быть написаны таким образом, чтобы тупик не мог возникнуть
при любом соотношении взаимных скоростей потоков. Так, если бы в примере, показанном на рис. 4.22, поток А и поток В запрашивали ресурсы в одинаковой последовательности, то тупик был бы в принципе невозможен. Другой, более гибкий подход к предотвращению тупиков заключается в том, что ОС каждый раз при запуске задач анализирует их потребности в ресурсах и определяет, может ли в данной мультипрограммной смеси возникнуть тупик. Если да, то запуск новой задачи временно откладывается. ОС может также использовать определенные правила при назначении ресурсов потокам, например, ресурсы могут выделяться операционной системой в определенной последовательности, общей для всех потоков.
В тех же случаях, когда тупиковую ситуацию не удалось предотвратить, важно быстро и точно ее распознать, поскольку блокированные потоки не выполняют никакой полезной работы. Если тупиковая ситуация образована множеством потоков, занимающих массу ресурсов, распознавание тупика является нетривиальной задачей. Существуют формальные, программно-реализованные методы распознавания тупиков, основанные на ведении таблиц распределения ресурсов и таблиц запросов к занятым ресурсам. Анализ этих таблиц позволяет обнаружить взаимные блокировки.
Если же тупиковая ситуация возникла, то не обязательно снимать с выполнения все заблокированные потоки. Можно снять только часть из них, освободив ресурсы, ожидаемые остальными потоками, можно вернуть некоторые потоки в область подкачки, можно совершить «откат» некоторых потоков до так называемой контрольной точки, в которой запоминается вся информация, необходимая для восстановления выполнения программы с данного места. Контрольные точки расставляются в программе в тех местах, после которых возможно возникновение тупика.
Рассмотренные выше механизмы синхронизации, основанные на использовании глобальных переменных процесса, обладают существенным недостатком — они не подходят для синхронизации потоков разных процессов. В таких случаях операционная система должна предоставлять потокам системные объекты синхронизации, которые были бы видны для всех потоков, даже если они принадлежат разным процессам и работают в разных адресных пространствах.
Примерами таких синхронизирующих объектов ОС являются системные семафоры, мьютексы, события, таймеры и другие — их набор зависит от конкретной ОС, которая создает эти объекты по запросам процессов. Чтобы процессы могли разделять синхронизирующие объекты, в разных ОС используются разные методы. Некоторые ОС возвращают указатель на объект. Этот указатель может быть доступен всем родственным процессам, наследующим характеристики общего родительского процесса. В других ОС процессы в запросах на создание объектов синхронизации указывают имена, которые должны быть им присвоены. Далее эти имена используются разными процессами для манипуляций объектами синхронизации. В таком случае работа с синхронизирующими объектами подобна работе с файлами. Их можно создавать, открывать, закрывать, уничтожать.
Кроме того, для синхронизации могут быть использованы такие «обычные» объекты ОС, как файлы, процессы и потоки. Все эти объекты могут находиться в двух состояниях: сигнальном и несигнальном — свободном. Для каждого объекта смысл, вкладываемый в понятие «сигнальное состояние», зависит от типа объекта. Так, например, поток переходит" в сигнальное состояние тогда, когда он завершается. Процесс переходит в сигнальное состояние тогда, когда завершаются все его потоки. Файл переходит в сигнальное состояние в том случае, когда завершается операция ввода-вывода для этого файла. Для остальных объектов сигнальное состояние устанавливается в результате выполнения специальных системных вызовов. Приостановка и активизация потоков осуществляются в зависимости от состояния синхронизирующих объектов ОС.
Потоки с помощью специального системного вызова сообщают операционной системе о том, что они хотят синхронизировать свое выполнение с состоянием некоторого объекта. Будем далее называть этот системный вызов Wait(X), где X — указатель на объект синхронизации. Системный вызов, с помощью которого поток может перевести объект синхронизации в сигнальное состояние, назовем Set(X).
Поток, выполнивший системный вызов Wait(X), переводится операционной системой в состояние ожидания до тех пор, пока объект X не перейдет в сигнальное состояние. Примерами системных вызовов типа Wait() и Set () являются вызовы Wait For Single object() и Set Event() в Windows NT, Dos Sem Wait() и Dos Sem Set() в OS/2, sieep() и wakeup() в UNIX.
Поток может ожидать установки сигнального состояния не одного объекта, а нескольких. При этом поток может попросить ОС активизировать его при установке либо одного из указанных объектов, либо всех объектов. Поток может в качестве аргумента системного вызова Wait() указать также максимальное время, которое он будет ожидать перехода объекта в сигнальное состояние, после чего ОС должна его активизировать в любом случае. Может случиться, что установки некоторого объекта в сигнальное состояние ожидают сразу несколько потоков. В зависимости от объекта синхронизации в состояние готовности могут переводиться либо все ожидающие это событие потоки, либо один из них.
Синхронизация тесно связана с планированием потоков. Во-первых, любое обращение потока с системным вызовом Wait(X) влечет за собой действия в подсистеме планирования — этот поток снимается с выполнения и помещается в очередь ожидающих потоков, а из очереди готовых потоков выбирается и активизируется новый поток. Во-вторых, при переходе объекта в сигнальное состояние (в результате выполнения некоторого потока — либо системного, либо прикладного) ожидающий этот объект поток (или потоки) переводится в очередь готовых к выполнению потоков. В обоих случаях осуществляется перепланирование потоков, при этом если в ОС предусмотрены изменяемые приоритеты и/или кванты времени, то они пересчитываются по правилам, принятым в этой операционной системе.
Рассмотрим несколько примеров, когда в качестве синхронизирующих объектов используются файлы, потоки и процессы.
Пусть программа приложения построена так, что для выполнения запросов, поступающих из сети, основной поток создает вспомогательные серверные потоки.
При поступлении от пользователя команды завершения приложения основной поток должен дождаться завершения всех серверных потоков и только после этого завершиться сам. Следовательно, процедура завершения должна включать вызов Wait(XI, Х2, ...), где XI, Х2 — указатели на серверные потоки. В результате выполнения данного системного вызова основной поток будет переведен в состояние ожидания и останется в нем до тех пор, пока все серверные потоки не перейдут в сигнальное состояние, то есть завершатся. После этого ОС переведет основной поток состояние готовности. При получении доступа к процессору основной поток завершится.
Другой пример. Пусть выполнение некоторого приложения требует последовательных работ-этапов. Для каждого этапа имеется свой отдельный процесс. Сигналом для начала работы каждого следующего процесса является завершение предыдущего. Для реализации такой логики работы необходимо в каждом процессе, кроме первого, предусмотреть выполнение системного вызова Wait(X), в котором синхронизирующим объектом является предшествующий поток. Объект-файл, переход которого в сигнальное состояние соответствует завершению операции ввода-вывода с этим файлом, используется в тех случаях, когда поток, инициировавший эту операцию, решает дождаться ее завершения, прежде чем продолжить свои вычисления.
Однако круг событий, с которыми потоку может потребоваться синхронизировать свое выполнение, отнюдь не исчерпывается завершением потока, процесса или операции ввода-вывода. Поэтому в ОС, как правило, имеются и другие, более универсальные объекты синхронизации, такие как событие (event), мьютекс (mutex), системный семафор и другие.
Мьютекс, как и семафор, обычно используется для управления доступом к данным.
В отличие от объектов-потоков, объектов-процессов и объектов-файлов, которые при переходе в сигнальное состояние переводят в состояние готовности все потоки, ожидающие этого события, объект-мьютекс «освобождает» из очереди ожидающих только один поток.
Работа мьютекса хорошо поясняется в терминах «владения». Пусть поток, который, пытаясь получить доступ к критическим данным, выполнил системный вызов Wait(X), где X — указатель на мьютекс. Предположим, что мьютекс находится в сигнальном состоянии, в этом случае поток тут же становится его владельцем, устанавливая его в несигнальное состояние, и входит в критическую секцию. После того как поток выполнил работу с критическими данными, он «отдает» мьютекс, устанавливая его в сигнальное состояние. В этот момент мьютекс свободен и не принадлежит ни одному потоку. Если какой-либо поток ожидает его освобождения, то он становится следующим владельцем этого мьютекса, одновременно мьютекс переходит в несигнальное состояние.
Объект-событие (в данном случае слово «событие» используется в узком смысле, как обозначение конкретного вида объектов синхронизации) обычно используется не для доступа к данным, а для того, чтобы оповестить другие потоки о том, что некоторые действия завершены. Пусть, например, в некотором приложении работа организована таким образом, что один поток читает данные из файла в буфер памяти, а другие потоки обрабатывают эти данные, затем первый поток считывает новую порцию данных, а другие потоки снова ее обрабатывают и так далее. В начале работы первый поток устанавливает объект-событие в несигнальное состояние. Все остальные потоки выполнили вызов Wait(X), где X -указатель события, и находятся в Приостановленном состоянии, ожидая наступления этого события. Как только буфер заполняется, первый поток сообщает об этом операционной системе, выполняя вызов Set(X). Операционная система просматривает очередь ожидающих потоков и активизирует все потоки, которые ждут этого события.
Сигнал дает возможность задаче реагировать на событие, источником которого может быть операционная система или другая задача. Сигналы вызывают прерывание задачи и выполнение заранее предусмотренных действий. Сигналы могут вырабатываться синхронно, то есть как результат работы самого процесса, а могут быть направлены процессу другим процессом, то есть вырабатываться асинхронно. Синхронные сигналы чаще всего приходят от системы прерываний процессора и свидетельствуют о действиях процесса, блокируемых аппаратурой, например деление на нуль, ошибка адресации, нарушение защиты памяти и т. д.
Примером асинхронного сигнала является сигнал с терминала. Во многих ОС предусматривается оперативное снятие процесса с выполнения. Для этого пользователь может нажать некоторую комбинацию клавиш (Ctrl+C, Ctrl+Break), в результате чего ОС вырабатывает сигнал и направляет его активному процессу. Сигнал может поступить в любой момент выполнения процесса (то есть он является асинхронным), требуя от процесса немедленного завершения работы. В данном случае реакцией на сигнал является безусловное завершение процесса.
В системе может быть определен набор сигналов. Программный код процесса, которому поступил сигнал, может либо проигнорировать его, либо прореагировать на него стандартным действием (например, завершиться), либо выполнить специфические действия, определенные прикладным программистом. В последнем случае в программном коде необходимо предусмотреть специальные системные вызовы, с помощью которых операционная система информируется, какую процедуру надо выполнить в ответ на поступление того или иного сигнала.
Сигналы обеспечивают логическую связь между процессами, а также между процессами и пользователями (терминалами). Поскольку посылка сигнала предусматривает знание идентификатора процесса, то взаимодействие посредством сигналов возможно только между, родственными процессами, которые могут получить данные об идентификаторах друг друга.
В распределенных системах, состоящих из нескольких процессоров, каждый из которых имеет собственную оперативную память, блокирующие переменные, семафоры, сигналы и другие аналогичные средства, основанные на разделяемой памяти, оказываются непригодными. В таких системах синхронизация может быть реализована только посредством обмена сообщениями.