2.3. Прохождение сигналов по магистрали
При организации обмена по магистралям и шинам разработчику необходимо учитывать несколько важных моментов, связанных как с особенностью распространения сигналов по шинам, так и с самой природой шин. В противном случае микропроцессорная система может попросту не работать или работать неустойчиво, хотя вся логика цифровых устройств, входящих в систему, будет спроектирована безошибочно.
В случае, когда системная шина (магистраль) микропроцессорной системы является внешней, а не скрыта внутри микросхемы, необходимо учитывать особенности распространения сигналов по длинным линиям. Хотя в большинстве случаев длина магистрали не слишком велика, не превышает 1 — 2 десятков сантиметров, это все равно оказывает большое влияние на синхронизацию обмена.
На прохождение сигналов по магистрали влияют следующие факторы: • конечная величина задержки распространения сигналов по линиям
магистрали;
• различие задержек распространения сигналов по разным линиям шины;
• неодновременное выставление сигналов на линии шины;
• искажение фронтов сигналов, проходящих по линиям магистрали;
• отражение сигналов от концов линий связи (рис. 2.14).
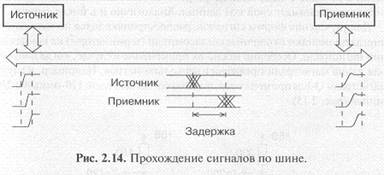
Для учета всех этих факторов разработчики стандартных магистралей обмена и стандартных протоколов обмена всегда закладывают необходимые задержки между сигналами, участвующими в обмене. Кроме того, задержки между сигналами выбираются таким образом, чтобы устройство, которому адресован тот или иной сигнал, имело достаточно времени для его обработки. Если разрабатывается новая магистраль, все это тоже надо учитывать.
Поэтому пытаться «модернизировать» какой-то стандартный протокол и ускорять обмен по магистрали путем уменьшения задержек, предусмотренных стандартом, очень опасно. Точно так же опасно, не изменяя протокола обмена, пытаться увеличить длину магистрали, увеличивая тем самым задержки распространения сигналов по линиям и шинам. Особенно чувствительны к такого рода «модернизациям» синхронные магистрали, в которых не предусмотрено обязательное подтверждение выполнения каждой операции.
Например, длительность фазы адреса в цикле обмена выбирается таким образом. В течение адресной фазы все сигналы всех разрядов кода адреса, пусть даже и сформированные процессором не одновременно, должны дойти до устройства-исполнителя по своим проводам шины. А устройство-исполнитель должно этот код адреса принять и обработать (то есть отличить свой адрес от чужого). Естественно, для гарантии в длительность адресной фазы еще добавляется небольшая дополнительная задержка.
Точно так же длительность фазы данных в цикле чтения должна выбираться такой, чтобы устройство-исполнитель успело получить строб чтения и выдать код читаемых данных на шину данных. Затем этот код должен успеть дойти до процессора и процессор должен успеть его прочитать. После чего процессор снимает сигнал строба чтения, этот задний фронт сигнала доходит с задержкой до устройства-исполнителя, которое также с задержкой снимает свой код данных. Аналогично и в цикле записи.
Для улучшения формы сигналов, распространяющихся по магистрали, иногда применяют оконечные согласователи (терминаторы) на концах линий магистрали. Особенно важно их применение в случае, когда допустимая длина магистрали превышает несколько метров. Например, в случае магистрали Q-bus применяются два типа согласователей: 120-омный и 250омный (рис. 2.15).

Включение согласователей предъявляет дополнительные требования к нагрузочной способности передатчиков, работающих на линии магистрали. В магистрали ISA подобные согласователи не используются, хотя к некоторым линиям присоединены резисторы, соединенные другим своим выводом с шиной питания (прежде всего это линии, тип выходного каскада для которых — ОК).
В любом случае выходные каскады передатчиков, работающих на линии магистрали, должны обеспечивать высокие выходные токи, так как к магистрали может подключаться несколько устройств, каждое из которых потребляет входной ток. Типичные величины требуемых выходных токов магистральных передатчиков находятся в пределах 20 — 30 мА. В то же время входные токи магистральных приемников должны быть малыми, чтобы не перегружать передатчики. Типичные величины допустимых входных токов магистральных приемников лежат в пределах 0,2 — 0,8 мА.
Лекция 3. Функции устройств магистрали
В этой лекции рассказывается о функциях основных устройств микропроцессорной системы: процессора, памяти, устройств ввода-вывода, о принципах их устройства и подключения к магистрали.
Ключевые слова: интерфейс, регистры, буферы, АЛУ, ОЗУ, ПЗУ, стек, селектор адреса.
2.4. Функции устройств магистрали
Рассмотрим теперь, как взаимодействуют на магистрали основные устройства микропроцессорной системы: процессор, память (оперативная и постоянная), устройства ввода/вывода.
Процессор (рис. 2.16) обычно представляет собой отдельную микросхему или же часть микросхемы (в случае микроконтроллера). В прежние годы процессор иногда выполнялся на комплектах из нескольких микросхем, но сейчас от такого подхода уже практически отказались. Микросхема процессора обязательно имеет выводы трех шин: шины адреса, шины данных и шины управления. Иногда некоторые сигналы и шины мультиплексируются, чтобы уменьшить количество выводов микросхемы процессора.
Важнейшие характеристики процессора — это количество разрядов его шины данных, количество разрядов его шины адреса и количество управляющих сигналов в шине управления. Разрядность шины данных определяет скорость работы системы. Разрядность шины адреса определяет допустимую сложность системы. Количество линий управления определяет разнообразие режимов обмена и эффективность обмена процессора с другими устройствами системы.
Кроме выводов для сигналов трех основных шин процессор всегда имеет вывод (или два вывода) для подключения внешнего тактового сигнала или кварцевого резонатора (CLK), так как процессор всегда представляет собой тактируемое устройство. Чем больше тактовая частота процессора, тем он быстрее работает, то есть тем быстрее выполняет команды. Впрочем, быстродействие процессора определяется не только тактовой частотой, но и особенностями его структуры. Современные процессоры выполняют большинство команд за один такт и имеют средства для параллельного выполнения нескольких команд. Тактовая частота процессора не связана прямо и жестко со скоростью обмена по магистрали, так как скорость обмена по магистрали ограничена задержками распространения сигналов и искажениями сигналов на магистрали. То есть тактовая частота процессора определяет только его внутреннее быстродействие, а не внешнее. Иногда тактовая частота процессора имеет нижний и верхний пределы. При превышении верхнего предела частоты возможно перегревание процессора, а также сбои, причем, что самое неприятное, возникающие не всегда и нерегулярно. Так что с изменением этой частоты надо быть очень осторожным.

Еще один важный сигнал, который имеется в каждом процессоре, — это
сигнал начального сброса RESET. При включении питания, при аварийной ситуации или зависании процессора подача этого сигнала приводит к инициализации процессора, заставляет его приступить к выполнению программы начального запуска. Аварийная ситуация может быть вызвана помехами по цепям питания и «земли», сбоями в работе памяти, внешними ионизирующими излучениями и еще множеством причин. В результате процессор может потерять контроль над выполняемой программой и остановиться в каком-то адресе. Для выхода из этого состояния как раз и используется сигнал начального сброса. Этот же вход начального сброса может использоваться для оповещения процессора о том, что напряжение питания стало ниже установленного предела. В таком случае процессор переходит к выполнению программы сохранения важных данных. По сути, этот вход представляет собой особую разновидность радиального прерывания.
Иногда у микросхемы процессора имеется еще один два входа радиальных прерываний для обработки особых ситуаций (например; для прерывания от внешнего таймера).
Шина питания современного процессора обычно имеет одно напряжение питания (+5B или +3,3B) и общий провод («землю»). Первые процессоры нередко требовали нескольких напряжений питания. В некоторых процессорах предусмотрен режим пониженного энергопотребления. Вообще, современные микросхемы процессоров, особенно с высокими тактовыми частотами, потребляют довольно большую мощность. В результате для поддержания нормальной рабочей температуры корпуса на них нередко приходится устанавливать радиаторы, вентиляторы или даже специальные микрохолодильники.
Для подключения процессора к магистрали используются буферные микросхемы, обеспечивающие, если необходимо, демультиплексирование сигналов и электрическое буферирование сигналов магистрали. Иногда протоколы обмена по системной магистрали и по шинам процессора не совпадают между собой, тогда буферные микросхемы еще и согласуют эти протоколы друг с другом. Иногда в микропроцессорной системе используется несколько магистралей (системных и локальных), тогда для каждой из магистралей применяется свой буферный узел. Такая структура характерна, например, для персональных компьютеров.
После включения питания процессор переходит в первый адрес программы начального пуска и выполняет эту программу. Данная программа предварительно записана в постоянную (энергонезависимую) память. После завершения программы начального пуска процессор начинает выполнять основную программу, находящуюся в постоянной или оперативной памяти, для чего выбирает по очереди все команды. От этой программы процессор могут отвлекать внешние прерывания или запросы на ПДП. Команды из памяти процессор выбирает с помощью циклов чтения по магистрали. При необходимости процессор записывает данные в память или в устройства ввода/вывода с помощью циклов записи или же читает данные из памяти или из устройств ввода/вывода с помощью циклов чтения.
Таким образом, основные функции любого процессора следующие;
• выборка (чтение) выполняемых команд;
• ввод (чтение) данных из памяти или устройства ввода/вывода;
• вывод (запись) данных в память или в устройства ввода/вывода;
• обработка данных (операндов), в том числе арифметические операции над ними;
• адресация памяти, то есть задание адреса памяти, с которым будет производиться обмен;
• обработка прерываний и режима прямого доступа. Упрощенно структуру микропроцессора можно представить в следующем виде (рис. 2.17).

Основные функции показанных узлов следующие. Схема управления выборкой команд выполняет чтение команд из памяти и их дешифрацию. В первых микропроцессорах было невозможно одно временное выполнение предыдущей команды и выборка следующей команды, так как процессор не мог совмещать эти операции. Но уже в 16 разрядных процессорах появляется так называемый конвейер (очередь) команд, позволяющий выбирать несколько следующих команд, пока выполняется предыдущая. Два процесса идут параллельно, что ускоряет работу процессора. Конвейер представляет собой небольшую внутреннюю память процессора, в которую при малейшей возможности (при освобождении внешней шины) записывается несколько команд, следующих за исполняемой. Читаются эти команды процессором в том же порядке, что и записываются в конвейер (это память типа FIFO, First In — First Out, первый вошел — первый вышел). Правда, если выполняемая команда предполагает переход не на следующую ячейку памяти, а на удаленную (с меньшим или большим адресом), конвейер не помогает, и его приходится сбрасывать. Но такие команды встречаются в программах сравнительно редко.
Развитием идеи конвейера стало использование внутренней кэш-памяти процессора, которая заполняется командами, пока процессор занят выполнением предыдущих команд. Чем больше объем кэш-памяти, тем меньше вероятность того, что ее содержимое придется сбросить при команде перехода. Понятно, что обрабатывать команды, находящиеся во внутренней памяти, процессор может гораздо быстрее, чем те, которые расположены во внешней памяти. В кэш-памяти могут храниться и данные, которые обрабатываются в данный момент, это также ускоряет работу. Для большего ускорения выборки команд в современных процессорах применяют совмещение выборки и дешифрации, одновременную дешифрацию нескольких команд, несколько параллельных конвейеров команд, предсказание команд переходов и некоторые другие методы.
Арифметика-логическое устройство (или АЛУ, ALU) предназначено для обработки информации в соответствии с полученной процессором командой. Примерами обработки могут служить логические операции (типа логического «И», «ИЛИ», «Исключающего ИЛИ» и т.д.) то есть побитные операции над операндами, а также арифметические операции (типа сложения, вычитания, умножения, деления и т.д.). Над какими кодами производится операция, куда помещается ее результат — определяется выполняемой командой. Если команда сводится всего лишь к пересылке данных без их обработки, то АЛУ не участвует в ее выполнении.
Быстродействие АЛУ во многом определяет производительность процессора. Причем важна не только частота тактового сигнала, которым тактируется АЛУ, но и количество тактов, необходимое для выполнения той или иной команды. Для повышения производительности разработчики стремятся довести время выполнения команды до одного такта, а также обеспечить работу АЛУ на возможно более высокой частоте. Один из путей решения этой задачи состоит в уменьшении количества выполняемых АЛУ команд, создание процессоров с уменьшенным набором команд (так называемые RISC процессоры). Другой путь повышения производительности процессора— использование нескольких параллельно работающих АЛУ.
Что касается операций над числами с плавающей точкой и других специальных сложных операций, то в системах на базе первых процессоров их реализовали последовательностью более простых команд, специальными подпрограммами, однако затем были разработаны специальные вычислители — математические сопроцессоры, которые заменяли основной процессор на время выполнения таких команд. В современных микропроцессорах математические сопроцессоры входят в структуру как составная часть.
Регистры процессора представляют собой по сути ячейки очень быстрой памяти и служат для временного хранения различных кодов: данных, адресов, служебных кодов. Операции с этими кодами выполняются предельно быстро, поэтому, в общем случае, чем больше внутренних регистров, тем лучше. Кроме того, на быстродействие процессора сильно влияет разрядность регистров. Именно разрядность регистров и АЛУ называется внутренней разрядностью процессора, которая может не совпадать с внешней разрядностью.
По отношению к назначению внутренних регистров существует два основных подхода. Первого придерживается, например, компания Intel, которая каждому регистру отводит строго определенную функцию. С одной стороны, это упрощает организацию процессора и уменьшает время выполнения команды, но с другой — снижает гибкость, а иногда и замедляет работу программы. Например, некоторые арифметические операции и обмен с устройствами ввода/вывода проводятся только через один регистр — аккумулятор, в результате чего при выполнении некоторых процедур может потребоваться несколько дополнительных пересылок между регистрами. Второй подход состоит в том, чтобы все (или почти все) регистры сделать равноправными, как, например, в 16-разрядных процессорах Т11 фирмы DEC. При этом достигается высокая гибкость, но необходимо усложнение структуры процессора. Существуют и промежуточные решения, в частности, в процессоре МС68000 фирмы Motorola половина регистров использовалась для данных, и они были взаимозаменяемы, а другая половина — для адресов, и они также взаимозаменяемы.
Регистр признаков (регистр состояния) занимает особое место, хотя он также является внутренним регистром процессора. Содержащаяся в нем информация — это не данные, не адрес, а слово состояния процессора (ССП, PSW — Processor Status Word). Каждый бит этого слова (флаг) содержит информацию о результате предыдущей команды. Например, есть бит нулевого результата, который устанавливается в том случае, когда результат выполнения предыдущей команды — нуль, и очищается в том случае, когда результат выполнения команды отличен от нуля. Эти биты (флаги) используются командами условных переходов, например, командой перехода в случае нулевого результата. В этом же регистре иногда содержатся флаги управления, определяющие режим выполнения некоторых команд.
Схема управления прерываниями обрабатывает поступающий на процессор запрос прерывания, определяет адрес начала программы обработки прерывания (адрес вектора прерывания), обеспечивает переход к этой программе после выполнения текущей команды и сохранения в памяти (в стеке) текущего состояния регистров процессора. По окончании программы обработки прерывания процессор возвращается к прерванной программе с восстановленными из памяти (из стека) значениями внутренних регистров. Подробнее о стеке будет рассказано в следующем разделе.
Схема управления прямым доступом к памяти служит для временного отключения процессора от внешних шин и приостановки работы процессора на время предоставления прямого доступа запросившему его устройству.
Логика управления организует взаимодействие всех узлов процессора, пере направляет данные, синхронизирует работу процессора с внешними сигналами, а также реализует процедуры ввода и вывода информации.
Таким образом, в ходе работы процессора схема выборки команд выбирает последовательно команды из памяти, затем эти команды выполняются, причем в случае необходимости обработки данных подключается АЛУ. На входы АЛУ могут подаваться обрабатываемые данные из памяти или из внутренних регистров. Во внутренних регистрах хранятся также коды адресов обрабатываемых данных, расположенных в памяти. Результат обработки в АЛУ изменяет состояние регистра признаков и записывается во внутренний регистр или в память (как источник, так и приемник данных указывается в составе кода команды). При необходимости информация может переписываться из памяти (или из устройства ввода/вывода) во внутренний регистр или из внутреннего регистра в память (или в устройство ввода/вывода).
Внутренние регистры любого микропроцессора обязательно выполняют две служебные функции:
• определяют адрес в памяти, где находится выполняемая в данный момент команда (функция счетчика команд или указателя команд)'
• определяют текущий адрес стека (функция указателя стека). В разных процессорах для каждой из этих функций может отводиться один или два внутренних регистра. Эти два указателя отличаются от других не только своим специфическим, служебным, системным назначением, но и особым способом изменения содержимого. Их содержимое программы могут менять только в случае крайней необходимости, так как любая ошибка при этом грозит нарушением работы компьютера, зависанием и порчей содержимого памяти.
Содержимое указателя (счетчика) команд изменяется следующим образом. В начале работы системы (при включении питания) в него заносится раз и навсегда установленное значение. Это первый адрес программы начального запуска. Затем после выборки из памяти каждой следующей команды значение указателя команд автоматически увеличивается (инкрементируется) на единицу (или на два в зависимости от формата команд и типа процессора). То есть следующая команда будет выбираться из следующего по порядку адреса памяти. При выполнении команд перехода, нарушающих последовательный перебор адресов памяти, в указатель команд принудительно записывается новое значение — новый адрес в памяти, начиная с которого адреса команд опять же будут перебираться последовательно. Такая же смена содержимого указателя команд производится при вызове подпрограммы и возврате из нее или при начале обработки прерывания и после его окончания.
О стеке будет подробнее рассказано в следующем разделе.
Память микропроцессорной системы выполняет функцию временного или постоянного хранения данных и команд. Объем памяти определяет допустимую сложность выполняемых системой алгоритмов, а также в некоторой степени и скорость работы системы в целом. Модули памяти выполняются на микросхемах памяти (оперативной или постоянной). Все чаще в составе микропроцессорных систем используется флэш-память (англ. — flash memory), которая представляет собой энергонезависимую память с возможностью многократной перезаписи содержимого.
Информация в памяти хранится в ячейках, количество разрядов которых равно количеству разрядов шины данных процессора. Обычно оно кратно восьми (например, 8, 16, 32, 64). Допустимое количество ячеек памяти определяется количеством разрядов шины адреса как 2N, где N— количество разрядов шины адреса. Чаще всего объем памяти измеряется в байтах независимо от разрядности ячейки памяти. Используются также следующие более крупные единицы объема памяти: килобайт — 210или 1024 байта (обозначается Кбайт), мегабайт — 220 или 1 048 576 байт (обозначается Мбайт), гигабайт — 230 байт (обозначается Мбайт), терабайт— 240 (обозначается Мбайт) Например, если память имеет 65 536 ячеек, каждая из которых 16-разрядная, то говорят, что память имеет объем 128 Кбайт. Совокупность ячеек памяти называется обычно пространством памяти системы.
Для подключения модуля памяти к системной магистрали используются блоки сопряжения, которые включают в себя дешифратор (селектор) адреса, схему обработки управляющих сигналов магистрали и буферы данных (рис. 2.18).
Оперативная память общается с системной магистралью в циклах чтения и записи, постоянная память — только в циклах чтения. Обычно в составе системы имеется несколько модулей памяти, каждый из которых работает в своей области пространства памяти. Селектор адреса как раз и определяет, какая область адресов пространства памяти отведена данному модулю памяти. Схема управления вырабатывает в нужные моменты сигналы разрешения работы памяти (CS) и сигналы разрешения записи в память (WR). Буферы данных передают данные от памяти к магистрали или от магистрали к памяти.
В пространстве памяти микропроцессорной системы обычно выделяются несколько особых областей, которые выполняют специальные функции.
Память программы начального запуска всегда выполняется на ПЗУ и
ли флэш-памяти. Именно с этой области процессор начинает работу после включения питания и после сброса его с помощью сигнала RESET.

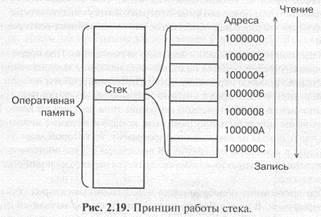
Память для стека или стек (Stack) — это часть оперативной памяти, предназначенная для временного хранения данных в режиме LIFO (Last InFirst Out).
Особенность стека по сравнению с другой оперативной памятью — это заданный и неизменяемый способ адресации. При записи любого числа (кода) в стек число записывается по адресу, определяемому как содержимое регистра указателя стека, предварительно уменьшенное (декрементированное) на единицу (или на два, если 16-разрядные слова расположены в памяти по четным адресам). При чтении из стека число читается из адреса, определяемого содержимым указателя стека, после чего это содержимое указателя стека увеличивается (инкрементируется) на единицу (или на два). В результате получается, что число, записанное последним, будет прочитано первым, а число, записанное первым, будет прочитано последним. Такая память называется LIFO или памятью магазинного типа (например, в магазине автомата патрон, установленный последним, будет извлечен первым).
Принцип действия стека показан на рис. 2.19 (адреса ячеек памяти выбраны условно).
Пусть, например, текущее состояние указателя стека 1000008, и в него надо записать два числа (слова). Первое слово будет записано по адресу 1000006 (перед записью указатель стека уменьшится на два). Второе — по адресу 1000004. После записи содержимое указателя стека — 1000004. Если затем прочитать из стека два слова, то первым будет прочитано слово из адреса 1000004, а после чтения указатель стека станет равным 1000006. Вторым будет прочитано слово из адреса 1000006, а указатель стека станет равным 1000008. Все вернулось к исходному состоянию. Первое записанное слово читается вторым, а второе — первым.
Необходимость такой адресации становится очевидной в случае много кратно вложенных подпрограмм. Пусть, например, выполняется основная программа, и из нее вызывается подпрограмма 1. Если нам надо сохранить значения данных и внутренних регистров основной программы на время выполнения подпрограммы, мы перед вызовом подпрограммы сохраним их в стеке (запишем в стек), а после ее окончания извлечем (прочитаем) их из стека. Если же из подпрограммы 1 вызывается подпрограмма 2, то ту же самую операцию мы проделаем с данными и содержимым внутренних регистров подпрограммы 1. Понятно, что внутри подпрограммы 2 крайними в стеке (читаемыми в первую очередь) будут данные из подпрограммы 1, а данные из основной программы будут глубже. При этом в случае чтения из стека автоматически будет соблюдаться нужный порядок читаемой информации. То же самое будет и в случае, когда таких уровней вложения подпрограмм гораздо больше. То есть то, что надо хранить подольше, прячется поглубже, а то, что скоро может потребоваться — с краю.
В системе команд любого процессора для обмена информацией со стеком предусмотрены специальные команды записи в стек (PUSH) и чтения из стека (POP). В стеке можно прятать не только содержимое всех внутренних регистров процессоров, но и содержимое регистра признаков (слово состояния процессора, PSW). Это позволяет, например, при возвращении из подпрограммы контролировать результат последней команды, выполненной непосредственно перед. вызовом этой подпрограммы. Можно также хранить в стеке и данные, для того чтобы удобнее было передавать их между программами и подпрограммами. В общем случае, чем больше область памяти, отведенная под стек, тем больше свободы у программиста и тем более сложные программы могут выполняться.
Следующая специальная область памяти — это таблица векторов прерываний.
Вообще, понятие прерывания довольно многозначно. Под прерыванием в общем случае понимается не только обслуживание запроса внешнего устройства, но и любое нарушение последовательной работы процессора. Например, может быть предусмотрено прерывание по факту некорректного выполнения арифметической операции типа деления на ноль. Или же прерывание может быть программным, когда в программе используется команда перехода на какую-то подпрограмму, из которой затем последует возврат в основную программу. В последнем случае общее с истинным прерыванием только то, как осуществляется переход на подпрограмму и возврат из нее.
Любое прерывание обрабатывается через таблицу векторов (указателей) прерываний. В этой таблице в простейшем случае находятся адреса начала программ обработки прерываний, которые и называются векторами. Длина таблицы может быть довольно большой (до нескольких сот элементов). Обычно таблица векторов прерываний располагается в начале пространства памяти (в ячейках памяти с малыми адресами). Адрес каждого вектора (или адрес начального элемента каждого вектора) представляет собой номер прерывания.
В случае аппаратных прерываний номер прерывания или задается устройством, запросившим прерывание (при векторных прерываниях), или же задается номером линии запроса прерываний (при радиальных прерываниях). Процессор, получив аппаратное прерывание, заканчивает выполнение текущей команды и обращается к памяти в область таблицы векторов прерываний, в ту ее строку, которая определяется номером запрошенного прерывания. Затем процессор читает содержимое этой строки (код вектора прерывания) и переходит в адрес памяти, задаваемый этим вектором. Начиная с этого адреса в памяти должна располагаться программа обработки прерывания с данным номером. В конце программы обработки прерываний обязательно должна располагаться команда выхода из прерывания, выполнив которую, процессор возвращается к выполнению прерванной основной программы. Параметры процессора на время выполнения программы обработки прерывания сохраняются в стеке.
Пусть, например, процессор (рис.2.20) выполнял основную программу и команду, находящуюся в адресе памяти 5000 (условно). В этот момент он получил запрос прерывания с номером (адресом вектора) 4. Процессор заканчивает выполнение команды из адреса 5000. Затем он сохраняет в стеке текущее значение счетчика команд (5001) и текущее значение PSW. После этого процессор читает из адреса 4 памяти код вектора прерывания. Пусть этот код равен 6000. Процессор переходит в адрес памяти 6000 и приступает к выполнению программы обработки прерывания, начинающейся с этого адреса. Пусть эта программа заканчивается в адресе 6100. Дойдя до этого адреса, процессор возвращается к выполнению прерванной программы. Для этого он извлекает из стека значение адреса (5001), на котором его прервали, и бывшее в тот момент PSW. Затем процессор читает команду из адреса 5001 и дальше последовательно выполняет команды основной программы.

Прерывание в случае аварийной ситуации обрабатывается точно так же, только адрес вектора прерывания (номер строки в таблице векторов) жестко привязан к данному типу аварийной ситуации.
Программное прерывание тоже обслуживается через таблицу векторов прерываний, но номер прерывания указывается в составе команды, вызывающей прерывание.
Такая сложная, на первый взгляд, организация прерываний позволяет программисту легко менять программы обработки прерываний, располагать их в любой области памяти, делать их любого размера и любой сложности.
Во время выполнения программы обработки прерывания может поступить новый запрос на прерывание. В этом случае он обрабатывается точно так же, как описано, но основной программой считается прерванная программа обработки предыдущего прерывания. Это называется многократным вложением прерываний. Механизм стека позволяет без проблем обслуживать это многократное вложение, так как первым из стека извлекается тот код, который был сохранен последним, то есть возврат из обработки данного прерывания происходит в программу обработки предыдущего прерывания.
Отметим, что в более сложных случаях в таблице векторов прерываний могут находиться не адреса начала программ обработки прерываний, а так называемые дескрипторы (описатели) прерываний. Но конечным результатом обработки этого дескриптора все равно будет адрес начала программы обработки прерываний.
Наконец, еще одна специальная область памяти микропроцессорной системы — это память устройств, подключенных к системной шине. Такое решение встречается нечасто, но иногда оно очень удобно. То есть процессор получает возможность обращаться к внутренней памяти устройств ввода/вывода или каких-то еще подключенных к системной шине устройств, как к своей собственной системной памяти. Обычно окно в пространстве памяти, выделяемое для этого, не слишком большое.
Все остальные части пространства памяти, как правило, имеют универсальное назначение. В них могут располагаться как данные, так и программы (конечно, в случае одношинной архитектуры). Иногда это пространство памяти используется как единое целое, без всяких границ. А иногда пространство памяти делится на сегменты с программно изменяемым адресом начала сегмента и с установленным размером сегмента. Оба подхода имеют свои плюсы и минусы. Например, использование сегментов позволяет защитить область программ или данных, но зато границы сегментов могут затруднять размещение больших программ и массивов данных.
В заключение остановимся на проблеме разделения адресов памяти и адресов устройств ввода/вывода. Существует два основных подхода к решению этой проблемы:
• выделение в общем адресном пространстве системы специальной области адресов для устройств ввода/вывода;
• полное разделение адресных пространств памяти и устройств ввода/ вывода.
Первый подход хорош тем, что при обращении к устройствам ввода/ вывода процессор может использовать те же команды, которые служат для взаимодействия с памятью. Но адресное пространство памяти должно быть уменьшено на величину адресного пространства устройств ввода/вывода. Например, при 16-разрядной шине адреса всего может быть 64К адресов. Из них 56К адресов отводится под адресное пространство памяти, а 8К адресов — под адресное пространство устройств ввода/вывода. Преимущество второго подхода состоит в том, что память занимает все адресное пространство микропроцессорной системы. Для общения с устройствами ввода/вывода применяются специальные команды и специальные стробы обмена на магистрали. Именно так сделано, например, в персональных компьютерах. Но возможности взаимодействия с устройствами ввода/вывода в данном случае существенно ограничены по сравнению с возможностями общения с памятью.
2.4.3. Функции устройств ввода/вывода
Устройства ввода/вывода обмениваются информацией с магистралью по тем же принципам, что и память. Наиболее существенное отличие с точки зрения организации обмена состоит в том, что модуль памяти имеет в адресном пространстве системы много адресов (до нескольких десятков миллионов), а устройство ввода/вывода обычно имеет немного адресов (обычно до десяти), а иногда и всего один адрес.
Но модули памяти системы обмениваются информацией только с магистралью, с процессором, а устройства ввода/вывода взаимодействуют еще и с внешними устройствами, цифровыми или аналоговыми. Поэтому разнообразие устройств ввода/вывода неизмеримо больше, чем модулей памяти. Часто используются еще и другие названия для устройств ввода/ вывода: устройства сопряжения, контроллеры, карты расширения, интерфейсные модули и т.д.
Объединяют все устройства ввода/вывода общие принципы обмена с магистралью и, соответственно, общие принципы организации узлов, которые осуществляют сопряжение с магистралью. Упрощенная структура устройства ввода/вывода (точнее, его интерфейсной части) приведена на рис. 2.21. Как и в случае модуля памяти, она обязательно содержит схему селектора адреса, схему управления для обработки стробов обмена и буферы данных.
Самые простейшие устройства ввода/вывода выдают на внешнее устройство код данных в параллельном формате и принимают из внешнего устройства код данных в параллельном формате. Такие устройства ввода/ вывода часто называют параллельными портами ввода/вывода. Они наиболее универсальны, то есть удовлетворяют потребности сопряжения с большим числом внешних устройств, поэтому их часто вводят в состав микропроцессорной системы в качестве стандартных устройств. Параллельные порты обычно имеются в составе микроконтроллеров. Именно через параллельные порты микроконтроллер связывается с внешним миром.
Входной порт (порт ввода) в простейшем случае представляет собой параллельный регистр, в который процессор может записывать информацию. Выходной порт (порт вывода) обычно представляет собой просто однонаправленный буфер, через который процессор может читать информацию от внешнего устройства. Именно такие порты показаны для примера на рис. 2.21. Порт может быть и двунаправленным (входным/выходным). В этом случае процессор пишет информацию во внешнее устройство и читает информацию из внешнего устройства по одному и тому же адресу в адресном пространстве системы. Входные и выходные линии для связи с внешним устройством при этом могут быть объединены поразрядно, образуя двунаправленные линии.

При обращении со стороны магистрали селектор адреса распознает адрес, приписанный данному устройству ввода/вывода. Схема управления выдает внутренние стробы обмена в ответ на магистральные стробы обмена. Входной буфер данных обеспечивает электрическое согласование шины данных с этим устройством (буфер может и отсутствовать). Данные из шины данных записываются в регистр по сигналу С и выдаются на внешнее устройство. Выходной буфер данных передает входные данные с внешнего устройства на шину данных магистрали в цикле чтения из порта.
Более сложные устройства ввода/вывода (устройства сопряжения) имеют в своем составе внутреннюю буферную оперативную память и даже могут иметь микроконтроллер, на который возложено выполнение функций обмена с внешним устройством.
Каждому устройству ввода/вывода отводится свой адрес в адресном пространстве микропроцессорной системы. Дублирование адресов должно быть исключено, за этим должны следить разработчик и пользователь микропроцессорной системы.
Устройства ввода/вывода помимо программного обмена могут также поддерживать режим обмена по прерываниям. В этом случае они преобразуют поступающий от внешнего устройства сигнал запроса на прерывание в сигнал запроса прерывания, необходимый для данной магистрали (или в последовательность сигналов при векторном прерывании). Если нужно использовать режим ПДП, устройство ввода/вывода должно выдать сигнал запроса ПДП на магистраль и обеспечить работу в циклах ПДП, принятых для данной магистрали.
В составе микропроцессорных систем, как правило, выделяются три специальные группы устройств ввода/вывода:
• устройства интерфейса пользователя (ввода информации пользователем и вывода информации для пользователя);
• устройства ввода/вывода для длительного хранения информации;
• таймерные устройства.
К устройствам ввода для интерфейса пользователя относятся контроллеры клавиатуры, тумблеров, отдельных кнопок, мыши, трекбола, джойстика и т.д. К устройствам вывода для интерфейса пользователя относятся контроллеры светодиодных индикаторов, табло, жидкокристаллических, плазменных и электронно-лучевых экранов и т.д. В простейших случаях управляющих контроллеров или микроконтроллеров эти средства могут отсутствовать. В сложных микропроцессорных системах они есть обязательно. Роль внешнего устройства в данном случае играет человек.
Устройства ввода/вывода для длительного хранения информации обеспечивают сопряжение микропроцессорной системы с дисководами (компакт дисков или магнитных дисков), а также с накопителями на магнитной ленте. Применение таких устройств существенно увеличивает возможности микропроцессорной системы в отношении хранения выполняемых программ и накопления массивов данных. В простейших контроллерах эти устройства отсутствуют.
Таймерные устройства отличаются от других устройств ввода/вывода тем, что они могут не иметь внешних выводов для подключения к внешним устройствам. Эти устройства предназначены для того, чтобы микропроцессорная система могла выдерживать заданные временные интервалы, следить за реальным временем, считать импульсы и т.д. В основе любого таймера лежит кварцевый тактовый генератор и много разрядные двоичные счетчики, которые могут перезапускать друг друга. Процессор может записывать в таймер коэффициенты деления тактовой частоты, количество отсчитываемых импульсов, задавать режим работы счетчиков таймера, а читает процессор выходные коды счетчиков. В принципе выполнить практически все функции таймера можно и программным путем, поэтому иногда таймеры в системе отсутствуют. Но включение в систему таймера позволяет решать более сложные задачи и строить более эффективные алгоритмы.
Еще один важный класс устройств ввода/вывода — это устройства для подключения к информационным сетям (локальным и глобальным). Эти устройства распространены не так широко, как устройства трех перечисленных ранее групп, но их значение с каждым годом становится все больше. Сейчас средства связи с информационными сетями вводятся иногда даже в простые контроллеры.
Иногда устройства ввода/вывода обеспечивают сопряжение с внешними устройствами с помощью аналоговых сигналов. Это бывает очень удобно, поэтому в состав некоторых микроконтроллеров даже вводят внутренние ЦАП и АЦП.
Глава 3. Функционирование процессора
Лекция 4. Адресация операндов и регистры процессора
В этой лекции рассказывается о функциях основных узлов процессора, о методах адресации операндов и о регистрах процессора.
Ключевые слова: операнды, методы адресации, сегментирование, регистры-указатели, счетчик команд, PSW.
Основная функция любого процессора, ради которой он и создается, — это выполнение команд. Система команд, выполняемых процессором, представляет собой нечто подобное таблице истинности логических элементов или таблице режимов работы более сложных логических микросхем. То есть она определяет логику работы процессора и его реакцию на те или иные комбинации внешних событий.
Написание программ для микропроцессорной системы — важнейший и часто наиболее трудоемкий этап разработки такой системы. А для создания эффективных программ необходимо иметь хотя бы самое общее представление о системе команд используемого процессора. Самые компактные и быстрые программы и подпрограммы создаются на языке Ассемблер, использование которого без знания системы команд абсолютно невозможно, ведь язык Ассемблер представляет собой символьную запись цифровых кодов машинного языка, кодов команд процессора. Конечно, для разработки программного обеспечения существуют всевозможные программные средства. Пользоваться ими обычно можно и без знания системы команд процессора. Чаще всего применяются языки программирования высокого уровня, такие как Паскаль и Си. Однако знание системы команд и языка Ассемблер позволяет в несколько раз повысить эффективность некоторых наиболее важных частей программного обеспечения любой микропроцессорной системы — от микроконтроллера до персонального компьютера.
Именно поэтому в данной главе мы рассмотрим основные типы команд, имеющиеся у большинства процессоров, и особенности их применения.
Каждая команда, выбираемая (читаемая) из памяти процессором, определяет алгоритм поведения процессора на ближайшие несколько тактов. Код команды говорит о том, какую операцию предстоит выполнить процессору и с какими операндами (то есть кодами данных), где взять исходную информацию для выполнения команды и куда поместить результат (если необходимо). Код команды может занимать от одного до нескольких байт, причем процессор узнает о том, сколько байт команды ему надо читать, из первого прочитанного им байта или слова. В процессоре код команды расшифровывается и преобразуется в набор микроопераций, выполняемых отдельными узлами процессора. Но разработчику микропроцессорных систем это знание не слишком важно, ему важен только результат выполнения той или иной команды.
Большая часть команд процессора работает с кодами данных (операндами). Одни команды требуют входных операндов (одного или двух), другие выдают выходные операнды (чаще один операнд). Входные операнды называются еще операндами-источниками, а выходные называются операндами-приемниками. Все эти коды операндов (входные и выходные) должны где-то располагаться. Они могут находиться во внутренних регистрах процессора (наиболее удобный и быстрый вариант). Они могут располагаться в системной памяти (самый распространенный вариант). Наконец, они могут находиться в устройствах ввода/вывода (наиболее редкий случай). Определение места положения операндов производится кодом команды. Причем существуют разные методы, с помощью которых код команды может определить, откуда брать входной операнд и куда помещать выходной операнд. Эти методы называются методами адресации. Эффективность выбранных методов адресации во многом определяет эффективность работы всего процессора в целом.
Количество методов адресации в различных процессорах может быть от 4 до 16. Рассмотрим несколько типичных методов адресации операндов, используемых сейчас в большинстве микропроцессоров.
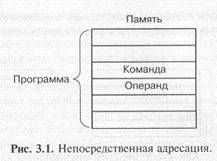
Непосредственная адресация (рис. 3.1) предполагает, что операнд (входной) находится в памяти непосредственно за кодом команды. Операнд обычно представляет собой константу, которую надо куда-то переслать, к чему-то прибавить и т.д. Например, команда может состоять в том, чтобы прибавить число 6 к содержимому какого-то внутреннего регистра процессора. Это число 6 будет располагаться в памяти, внутри программы в адресе, следующем за кодом данной команды сложения.
Прямая (она же абсолютная) адресация (рис. 3.2) предполагает, что операнд (входной или выходной) находится в памяти по адресу, код которого находится внутри программы сразу же за кодом команды. Например, команда может состоять в том, чтобы очистить (сделать нулевым) содержимое ячейки памяти с адресом 1000000. Код этого адреса 1000000 будет располагаться в памяти, внутри программы в следующем адресе за кодом данной команды очистки.

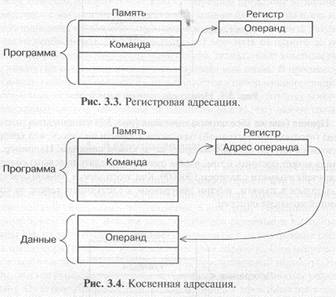
Регистровая адресация (рис. 3.3) предполагает, что операнд (входной или выходной) находится во внутреннем регистре процессора. Например, команда может состоять в том, чтобы переслать число из нулевого регистра в первый. Номера обоих регистров (0 и 1) будут определяться кодом команды пересылки.
Косвенно-регистровая (она же косвенная) адресация предполагает, что во внутреннем регистре процессора находится не сам операнд, а его адрес в памяти (рис. 3.4). Например, команда может состоять в том, чтобы очистить ячейку памяти с адресом, находящимся в нулевом регистре. Номер этого регистра (0) будет определяться кодом команды очистки.
I
Реже встречаются еще два метода адресации.
Автоинкрементная адресация очень близка к косвенной адресации, но отличается от нее тем, что после выполнения команды содержимое используемого регистра увеличивается на единицу или на два. Этот метод адресации очень удобен, например, при последовательной обработке кодов из массива данных, находящегося в памяти. После обработки какого-то кода адрес в регистре будет указывать уже на следующий код из массива. При использовании косвенной адресации в данном случае пришлось бы увеличивать содержимое этого регистра отдельной командой.
Автодекрементная адресация работает похоже на автоинкрементную, но только содержимое выбранного регистра уменьшается на единицу или на два перед выполнением команды. Эта адресация также удобна при обработке массивов данных. Совместное использование автоинкрементной и автодекрементной адресаций позволяет организовать память стекового типа (см. раздел 2.4.2).
Из других распространенных методов адресации можно упомянуть об индексных методах, которые предполагают для вычисления адреса операнда прибавление к содержимому регистра заданной константы (индекса). Код этой константы располагается в памяти непосредственно за кодом команды.
Отметим, что выбор того или иного метода адресации в значительной степени определяет время выполнения команды. Самая быстрая адресация — это регистровая, так как она не требует дополнительных циклов обмена по магистрали. Если же адресация требует обращения к памяти, то время выполнения команды будет увеличиваться за счет длительности необходимых циклов обращения к памяти. Понятно, что чем больше внутренних регистров у процессора, тем чаще и свободнее можно применять регистровую адресацию, и тем быстрее будет работать система в целом.
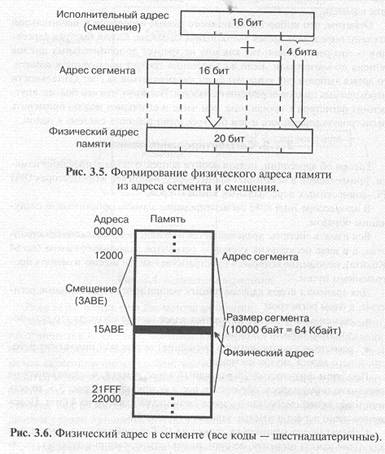
Говоря об адресации, нельзя обойти вопрос о сегментировании памяти, применяемой в некоторых процессорах, например в процессорах IBM РС-совместимых персональных компьютеров.
В процессоре Intel 8086 сегментирование памяти организовано следующим образом.
Вся память системы представляется не в виде непрерывного пространства, а в виде нескольких кусков — сегментов заданного размера (по 64 Кбайта), положение которых в пространстве памяти можно изменять программным путем.
Для хранения кодов адресов памяти используются не отдельные регистры, а пары регистров:
• сегментный регистр определяет адрес начала сегмента (то есть положение сегмента в памяти);
• регистр указателя (регистр смещения) определяет положение рабочего адреса внутри сегмента.
При этом физический 20-разрядный адрес памяти, выставляемый на внешнюю шину адреса, образуется так, как показано на рис. 3.5, то есть путем сложения смещения и адреса сегмента со сдвигом на 4 бита. Положение этого адреса в памяти показано на рис. 3.6.
Сегмент может начинаться только на 16-байтной границе памяти (так как адрес начала сегмента, по сути, имеет четыре младших нулевых разряда, как видно из рис. 3.5), то есть с адреса, кратного 16. Эти допустимые границы сегментов называются границами параграфов.
Отметим, что введение сегментирования, прежде всего, связано с тем, что внутренние регистры процессора 16-разрядные, а физический адрес памяти 20-разрядный (16-разрядный адрес позволяет использовать память только в 64 Кбайт, что явно недостаточно). В появившемся в то же время процессоре МС68000 фирмы Motorola внутренние регистры 32-разрядные, поэтому там проблемы сегментирования памяти не возникает.
Применяются и более сложные методы сегментирования памяти. Например, в процессоре Intel 80286 в так называемом защищенном режиме адрес памяти вычисляется в соответствии с рис. 3.7.
В сегментном регистре в данном случае хранится не базовый (начальный) адрес сегментов, а коды селекторов, определяющие адреса в памяти, по которым хранятся дескрипторы (то есть описатели) сегментов. Область памяти с дескрипторами называется таблицей дескрипторов. Каждый дескриптор сегмента содержит базовый адрес сегмента, размер сегмента (от 1 до 64 Кбайт) и его атрибуты. Базовый адрес сегмента имеет разрядность 24 бит, что обеспечивает адресацию 16 Мбайт физической памяти.

Таким образом, на сумматор, вычисляющий физический адрес памяти, подается не содержимое сегментного регистра, как в предыдущем случае, а базовый адрес сегмента из таблицы дескрипторов.
Еще более сложный метод адресации памяти с сегментированием использован в процессоре Intel 80386 и в более поздних моделях процессоров фирмы Intel. Этот метод иллюстрируется рис. 3.8.
Адрес памяти (физический адрес) вычисляется в три этапа. Сначала вычисляется так называемый эффективный адрес (32-разрядный) путем суммирования трех компонентов: базы, индекса и смещения (Base, Index, Displacement), причем возможно умножение индекса на масштаб (Scale). Эти компоненты имеют следующий смысл:

• смещение — это 8-, 16 или 32-разрядное число, включенное в команду.
• база — это содержимое базового регистра процессора. Обычно оно используется для указания на начало некоторого массива.
• индекс — это содержимое индексного регистра процессора. Обычно оно используется для выбора одного из элементов массива.
• масштаб — это множитель (он может быть равен 1, 2, 4 или 8), указанный в коде команды, на который перед суммированием с другими компонентами умножается индекс. Он используется для указания размера элемента массива.
Затем специальный блок сегментации вычисляет 32-разрядный линейный адрес, который представляет собой сумму базового адреса сегмента из сегментного регистра с эффективным адресом. Наконец, физический 32 битный адрес памяти образуется путем преобразования линейного адреса блоком страничной переадресации, который осуществляет перевод линейного адреса в физический страницами по 4 Кбайта.
В любом случае сегментирование позволяет выделить в памяти один или несколько сегментов для данных и один или несколько сегментов для программ. Переход от одного сегмента к другому сводится всего лишь к изменению содержимого сегментного регистра. Иногда это бывает очень удобно. Но для программиста работать с сегментированной памятью обычно сложнее, чем с непрерывной, несегментированной памятью, так как приходится следить за границами сегментов, за их описанием, переключением и т.д.
3.1.3. Адресация байтов и слов
Многие процессоры, имеющие разрядность 16 или 32, способны адресовать не только целое слово в памяти (16-разрядное или 32-разрядное), но и отдельные байты. Каждому байту в каждом слове при этом отводится свой адрес.
Так, в случае 16-разрядных процессоров все слова в памяти (16-разрядные) имеют четные адреса. А байты, входящие в эти слова, могут иметь как четные адреса, так и нечетные.
Например, пусть 16-разрядная ячейка памяти имеет адрес 23420, и в ней хранится код 2A5E (рис. 3.9).

При обращении к целому слову (с содержимым 2A5E) процессор выставляет адрес 23420. При обращении к младшему байту этой ячейки (с содержимым 5Е) процессор выставляет тот же самый адрес 23420, но использует команду, адресующую байт, а не слово. При обращении к старшему байту этой же ячейки (с содержимым 2А) процессор выставляет адрес 23421 и использует команду, адресующую байт. Следующая по порядку 16-разрядная ячейка памяти с содержимым 487F будет иметь адрес 23422, то есть опять же четный. Ее байты будут иметь адреса 23422 и 23423.
Для различия байтовых и словных циклов обмена на магистрали в шине управления предусматривается специальный сигнал байтового обмена. Для работы с байтами в систему команд процессора вводятся специальные команды или предусматриваются методы байтовой адресации.
Как уже упоминалось, внутренние регистры процессора представляют собой сверхоперативную память небольшого размера, которая предназначена для временного хранения служебной информации или данных. Количество регистров в разных процессорах может быть от 6 — 8 до нескольких десятков. Регистры могут быть универсальными и специализированными. Специализированные регистры, которые присутствуют в большинстве процессоров это регистр-счетчик команд, регистр состояния (PSW), регистр указателя стека. Остальные регистры процессора могут быть как универсальными, так и специализированными.
Например, в 16-разрядном процессоре Т-11 фирмы DEC было 8 регистров общего назначения (РОН) и один регистр состояния. Все регистры имели по 16 разрядов. Из регистров общего назначения один отводился под счетчик команд, другой — под указатель стека. Все остальные регистры общего назначения полностью взаимозаменяемы, то есть имеют универсальное назначение, могут хранить как данные, так и адреса (указатели), индексы и т.д. Максимально допустимый объем памяти для данного процессора составлял 64 Кбайт (адрес памяти 16-разрядный).
В 16-разрядном процессоре МС68000 фирмы Motorola было 19 регистров: 16-разрядный регистр состояния, 32-разрядный регистр счетчика команд, 9 регистров адреса (32-разрядных) и 8 регистров данных (32-разрядных). Два регистра адреса отведены под указатели стека. Максимально допустимый объем адресуемой памяти — 16 Мбайт (внешняя шина адреса 24-разрядная). Все 8 регистров данных взаимозаменяемы. 7 регистров адреса — тоже взаимозаменяемы.
В 16-разрядном процессоре Intel 8086, который стал базовым в линии процессоров, используемых в персональных компьютерах, реализован принципиально другой подход. Каждый регистр этого процессора имеет свое особое назначение, и заменять друг друга регистры могут только частично или же не могут вообще. Остановимся на особенностях этого процессора подробнее.
Процессор 8086 имеет 14 регистров разрядностью по 16 бит. Из них четыре регистра (АХ, ВХ, СХ, DX) — это регистры данных, каждый из которых помимо хранения операндов и результатов операций имеет еще и свое специфическое назначение:
• регистр АХ — умножение, деление, обмен с устройствами ввода/вывода (команды ввода и вывода);
• регистр ВХ — базовый регистр в вычислениях адреса;
• регистр СХ — счетчик циклов;
• регистр DX — определение адреса ввода/вывода. Для регистров данных существует возможность раздельного использования обоих байтов (например, для регистра AX они имеют обозначения AL — младший байт и АН — старший байт).
Следующие четыре внутренних регистра процессора — это сегментные регистры, каждый из которых определяет положение одного из рабочих сегментов (рис. 3.10):
• регистр CS (Code Segment) соответствует сегменту команд, исполняемых в данный момент;
• регистр DS (Data Segment) соответствует сегменту данных, с которыми работает процессор;
• регистр ES (Extra Segment) соответствует дополнительному сегменту данных;
• регистр SS (Stack Segment) соответствует сегменту стека.
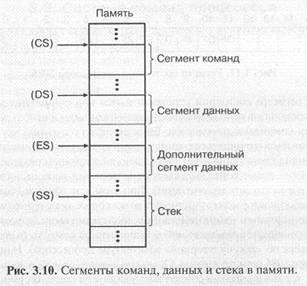
В принципе, все эти сегменты могут и перекрываться для оптимального использования пространства памяти. Например, если программа занимает только часть сегмента, то сегмент данных может начинаться сразу после завершения работы программы (с точностью 16 байт), а не после окончания всего сегмента программы.
Следующие пять регистров процессора (SP — Stack Pointer, BP — Base Pointer, SI — Source Index, DI — Destination Index, IP — Instruction Pointer) служат указателями (то есть определяют смещение в пределах сегмента). Например, счетчик команд процессора образуется парой регистров CS и IP, а указатель стека — парой регистров SP и SS. Регистры SI, DI используются в строковых операциях, то есть при последовательной обработке не скольких ячеек памяти одной командой.
Последний регистр FLAGS — это регистр состояния процессора (PSW). Из его 16 разрядов используются только девять (рис. 3.11): CF (Carry Flag) — флаг переноса при арифметических операциях, PF (Parity Flag) — флаг четности результата, AF (Auxiliary Flag) — флаг дополнительного переноса, ZF (Zero Flag) — флаг нулевого результата, SF (Sign Flag) — флаг знака (совпадает со старшим битом результата), TF (Trap Flag) — флаг пошагового режима (используется при отладке), IF (Interruptenable Flag) — флаг разрешения аппаратных прерываний, DF (Direction Flag) — флаг направления при строковых операциях, OF (Overflow Flag) — флаг переполнения.

Биты регистра состояния устанавливаются или очищаются в зависимости от результата исполнения предыдущей команды и используются некоторыми командами процессора. Биты регистра состояния могут также устанавливаться и очищаться специальными командами процессора (о системе команд процессора будет рассказано в следующем разделе).
Во многих процессорах выделяется специальный регистр, называемый аккумулятором (то есть накопителем). При этом, как правило, только этот регистр-аккумулятор может участвовать во всех операциях, только через него может производиться взаимодействие с устройствами ввода/вывода. Иногда в него же помещается результат любой выполненной команды (в этом случае говорят даже об «аккумуляторной» архитектуре процессора). Например, в процессоре 8086 регистр данных АХ можно считать своеобразным аккумулятором, так как именно он обязательно участвует в командах умножения и деления, а также только через него можно пересылать данные в устройство ввода/вывода и из устройства ввода/вывода. Выделение специального регистра-аккумулятора упрощает структуру процессора и ускоряет пересылки кодов внутри процессора, но в некоторых случаях замедляет работу системы в целом, так как весь поток информации должен пройти через один регистр-аккумулятор. В случае, когда несколько регистров процессора полностью взаимозаменяемы, таких проблем не возникает.
Лекция 5. Система команд процессора
В этой лекции рассказывается об основных группах команд процессора, об особенностях выполнения различных команд, о методах организации подпрограмм.
Ключевые слова: арифметические и логические команды, команды пересылки, команды переходов, подпрограммы, ветвления.
3.3. Система команд процессора
В общем случае система команд процессора включает в себя следующие четыре основные группы команд:
• команды пересылки данных;
• арифметические команды;
• логические команды;
• команды переходов.
Команды пересылки данных не требуют выполнения никаких операций над операндами. Операнды просто пересылаются (точнее, копируются) из источника (Source) в приемник (Destination). Источником и приемником могут быть внутренние регистры процессора, ячейки памяти или устройства ввода/вывода. АЛУ в данном случае не используется.
Арифметические команды выполняют операции сложения, вычитания, умножения, деления, увеличения на единицу (инкрементирования), уменьшения на единицу (декрементирования) и т.д. Этим командам требуется один или два входных операнда. Формируют команды один выходной операнд.
Логические команды производят над операндами логические операции, например, логическое И, логическое ИЛИ, исключающее ИЛИ, очистку, инверсию, разнообразные сдвиги (вправо, влево, арифметический сдвиг, циклический сдвиг). Этим командам, как и арифметическим, требуется один или два входных операнда, и формируют они один выходной операнд.
Наконец, команды переходов предназначены для изменения обычного порядка последовательного выполнения команд. С их помощью opraнизуются переходы на подпрограммы и возвраты из них, всевозможные циклы, ветвления программ, пропуски фрагментов программ и т.д. Команды переходов всегда меняют содержимое счетчика команд. Переходы могут быть условными и безусловными. Именно эти команды позволяют строить сложные алгоритмы обработки информации.
В соответствии с результатом каждой выполненной команды устанавливаются или очищаются биты регистра состояния процессора (PSW). Но надо помнить, что не все команды изменяют все имеющиеся в PSW флаги. Это определяется особенностями каждого конкретного процессора.
У разных процессоров системы команд существенно различаются, но в основе своей они очень похожи. Количество команд у процессоров также различно. Например, у упоминавшегося уже процессора МС68000 всего 61 команда, а у процессора 8086 — 133 команды. У современных мощных процессоров количество команд достигает нескольких сотен. В то же время существуют процессоры с сокращенным набором команд (так называемые RISC-процессоры), в которых за счет максимального сокращения количества команд достигается увеличение эффективности и скорости их выполнения.
Рассмотрим теперь особенности четырех выделенных групп команд процессора более подробно.
3.3.1. Команды пересылки данных
Команды пересылки данных занимают очень важное место в системе команд любого процессора. Они выполняют следующие важнейшие функции:
• загрузка (запись) содержимого во внутренние регистры процессора;
• сохранение в памяти содержимого внутренних регистров процессора;
• копирование содержимого из одной области памяти в другую;
• запись в устройства ввода/вывода и чтение из устройств ввода/вывода. В некоторых процессорах (например, Т-11) все эти функции выполняются одной единственной командой МОЧ (для байтовых пересылок— МОЧВ) но с различными методами адресации операндов.
В других процессорах помимо команды MOV имеется еще несколько команд для выполнения перечисленных функций. Например, для загрузки регистров могут использоваться команды загрузки, причем для разных регистров — разные команды (их обозначения обычно строятся с использованием слова LOAD — загрузка). Часто выделяются специальные команды для сохранения в стеке и для извлечения из стека (PUSH— сохранить в стеке, РОР — извлечь из стека). Эти команды выполняют пересылку с автоинкрементной и с автодекрементной адресацией (даже если эти режимы адресации не предусмотрены в процессоре в явном виде).
Иногда в систему команд вводится специальная команда MOVS для строчной (или цепочечной) пересылки данных (например, в процессоре 8086). Эта команда пересылает не одно слово или байт, а заданное количество слов или байтов (MOVSB), то есть инициирует не один цикл обмена по магистрали, а несколько. При этом адрес памяти, с которым происходит взаимодействие, увеличивается на 1или на 2 после каждого обращения или же уменьшается на 1 или на 2 после каждого обращения. То есть в неявном виде применяется автоинкрементная или автодекрементная адресация.
В некоторых процессорах (например, в процессоре 8086) специально выделяются функции обмена с устройствами ввода/вывода. Команда IN используется для ввода (чтения) информации из устройства ввода/вывода, а команда OUT используется для вывода (записи) в устройство ввода/ вывода. Обмен информацией в этом случае производится между регистром-аккумулятором и устройством ввода/вывода. В более продвинутых процессорах этого же семейства (начиная с процессора 80286) добавлены команды строчного (цепочечного) ввода (команда INS) и строчного вывода (команда OUTS). Эти команды позволяют пересылать целый массив (строку) данных из памяти в устройство ввода/вывода (OUTS) или из устройства ввода/вывода в память (INS). Адрес памяти после каждого обращения увеличивается или уменьшается (как и в случае с командой MOVS).
Также к командам пересылки данных относятся команды обмена информацией (их обозначение строится на основе слова Exchange). Может быть предусмотрен обмен информацией между внутренними регистрами, между двумя половинами одного регистра (SWAP) или между регистром и ячейкой памяти.
Арифметические команды рассматривают коды операндов как числовые двоичные или двоично-десятичные коды. Эти команды могут быть разделены на пять основных групп:
• команды операций с фиксированной запятой (сложение, вычитание, умножение, деление);
• команды операций с плавающей запятой (сложение, вычитание, умножение, деление);
• команды очистки;
• команды инкремента и декремента;
• команда сравнения.
Команды операций с фиксированной запятой работают с кодами в регистрах процессора или в памяти как с обычными двоичными кодами. Команда сложения (ADD) вычисляет сумму двух кодов. Команда вычитания (SUB) вычисляет разность двух кодов. Команда умножения (MUL) вычисляет произведение двух кодов (разрядность результата вдвое больше разрядности сомножителей). Команда деления (DIV) вычисляет частное от деления одного кода на другой. Причем все эти команды могут работать как с числами со знаком, так и с числами без знака.
Команды операций с плавающей запятой (точкой) используют формат представления чисел с порядком и мантиссой (обычно эти числа занимают две последовательные ячейки памяти). В современных мощных процессорах набор команд с плавающей запятой не ограничивается только четырьмя арифметическими действиями, а содержит и множество других более сложных команд, например, вычисление тригонометрических функций, логарифмических функций, а также сложных функций, необходимых при обработке звука и изображения.
Команды очистки (CLR) предназначены для записи нулевого кода в регистр или ячейку памяти. Эти команды могут быть заменены командами пересылки нулевого кода, но специальные команды очистки обычно выполняются быстрее, чем команды пересылки. Команды очистки иногда относят к группе логических команд, но суть их от этого не меняется.
Команды инкремента (увеличения на единицу, INC) и декремента (уменьшения на единицу, DEC) также бывают очень удобны. Их можно в принципе заменить командами суммирования с единицей или вычитания единицы, но инкремент и декремент выполняются быстрее, чем суммирование и вычитание. Эти команды требуют одного входного операнда, который одновременно является и выходным операндом.
Наконец, команда сравнения (обозначается CMP) предназначена для сравнения двух входных операндов. По сути, она вычисляет разность этих двух операндов, но выходного операнда не формирует, а всего лишь изменяет биты в регистре состояния процессора (PSW) по результату этого вычитания. Следующая за командой сравнения команда (обычно это команда перехода) будет анализировать биты в регистре состояния процессора и выполнять действия в зависимости от их значений (о командах перехода речь идет в разделе 3.3.4). В некоторых процессорах предусмотрены команды цепочечного сравнения двух последовательностей операндов, находящихся в памяти (например, в процессоре 8086 и совместимых с ним).
Логические команды выполняют над операндами логические (побитовые) операции, то есть они рассматривают коды операндов не как единое число, а как набор отдельных битов. Этим они отличаются от арифметических команд. Логические команды выполняют следующие основные операции:
• логическое И, логическое ИЛИ, сложение по модулю 2 (Исключающее ИЛИ);
• логические, арифметические и циклические сдвиги;
• проверка битов и операндов;
• установка и очистка битов (флагов) регистра состояния процессора (PSW).
Команды логических операций позволяют побитно вычислять основные логические функции от двух входных операндов. Кроме того, операция И (AND) используется для принудительной очистки заданных битов (в качестве одного из операндов при этом используется код маски, в котором разряды, требующие очистки, установлены в нуль). Операция ИЛИ (OR) применяется для принудительной установки заданных битов (в качестве одного из операндов при этом используется код маски, в котором разряды, требующие установки в единицу, равны единице). Операция «Исключающее ИЛИ» (XOR) используется для инверсии заданных битов (в качестве одного из операндов при этом применяется код маски, в котором биты, подлежащие инверсии, установлены в единицу). Команды требуют двух входных операндов и формируют один выходной операнд.
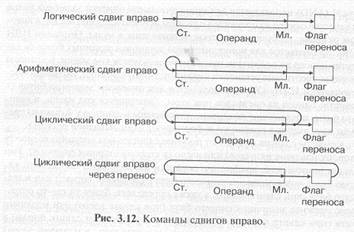
Команды сдвигов позволяют побитно сдвигать код операнда вправо (в сторону младших разрядов) или влево (в сторону старших разрядов). Тип сдвига (логический, арифметический или циклический) определяет, каково будет новое значение старшего бита (при сдвиге вправо) или младшего бита (при сдвиге влево), а также определяет, будет ли где-то сохранено прежнее значение старшего бита (при сдвиге влево) или младшего бита (при сдвиге вправо). Например, при логическом сдвиге вправо в старшем разряде кода операнда устанавливается нуль, а младший разряд записывается в качестве флага переноса в регистр состояния процессора. А при арифметическом сдвиге вправо значение старшего разряда сохраняется прежним (нулем или единицей), младший разряд также записывается в качестве флага переноса.
Циклические сдвиги позволяют сдвигать биты кода операнда по кругу (по часовой стрелке при сдвиге вправо или против часовой стрелки при сдвиге влево). При этом в кольцо сдвига может входить или не входить флаг переноса. В бит флага переноса (если он используется) записывается значение старшего бита при циклическом сдвиге влево и младшего бита при циклическом сдвиге вправо. Соответственно, значение бита флага переноса будет переписываться в младший разряд при циклическом сдвиге влево и в старший разряд при циклическом сдвиге вправо.
Для примера на рис. 3.12 показаны действия, выполняемые командами сдвигов вправо.
Команды проверки битов и операндов предназначены для установки или очистки битов регистра состояния процессора в зависимости от значения выбранных битов или всего операнда в целом. Выходного операнда команды не формируют. Команда проверки операнда (TST) проверяет весь код операнда в целом на равенство нулю и на знак (на значение старшего бита), она требует только одного входного операнда. Команда проверки бита (BIT) проверяет только отдельные биты, для выбора которых в качестве второго операнда используется код маски. В коде маски проверяемым битам основного операнда должны соответствовать единичные разряды.
Наконец, команды установки и очистки битов регистра состояния процессора (то есть флагов) позволяют установить или очистить любой флаг, что бывает очень удобно. Каждому флагу обычно соответствуют две команды, одна из которых устанавливает его в единицу, а другая сбрасывает в нуль. Например, флагу переноса С (от Carry) будут соответствовать команды С1 С (очистка) и SEC или STC (установка).