Глава 1. Философия микропроцессорной техники
Лекция 1. Философия микропроцессорной техники
В этой лекции рассказывается о базовой терминологии микропроцессорной техники, о принципах организации микропроцессорных систем, о структуре связей, режимах работы и об основных типах микропроцессорных систем.
Ключевые слова: микропроцессор, микропроцессорная система, шина, архитектура, память, устройство ввода-вывода.
В этой главе рассматриваются базовые концепции, которые лежат в основе любой микропроцессорной системы — от простейшего микроконтроллера до сложного компьютера. Именно в этом смысле здесь используется термин «философия».
Для начала несколько основных определений.
• Электронная система — в данном случае это любой электронный узел, блок, прибор или комплекс, производящий обработку информации.
• Задача — это набор функций, выполнение которых требуется от электронной системы.
• Быстродействие — это показатель скорости выполнения электронной системой ее функций.
• Гибкость — это способность системы подстраиваться под различные задачи.
• Избыточность — это показатель степени соответствия возможностей системы решаемой данной системой задаче.
• Интерфейс — соглашение об обмене информацией, правила обмена информацией, подразумевающие электрическую, логическую и конструктивную совместимость устройств, участвующих в обмене. Другое название — сопряжение.
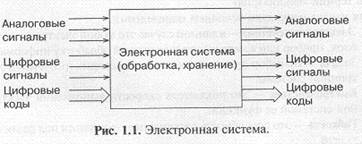
Микропроцессорная система может рассматриваться как частный случай электронной системы, предназначенной для обработки входных сигналов и выдачи выходных сигналов (рис. 1.1). В качестве входных и выходных сигналов при этом могут использоваться аналоговые сигналы, одиночные цифровые сигналы, цифровые коды, последовательности цифровых кодов. Внутри системы может производиться хранение, накопление сигналов (или информации), но суть от этого не меняется. 1.сли система цифровая (а микропроцессорные системы относятся к разряду цифровых), то входные аналоговые сигналы преобразуются в последовательности кодов выборок с помощью АЦП, а выходные аналоговые сигналы формируются из последовательности кодов выборок с помощью ЦАП. Обработка и хранение информации производятся в цифровом виде.
Характерная особенность традиционной цифровой системы состоит в том, что алгоритмы обработки и хранения информации в ней жестко связаны со схемотехникой системы. То есть изменение этих алгоритмов возможно только путем изменения структуры системы, замены электронных узлов, входящих в систему, и/или связей между ними. Например, если нам нужна дополнительная операция суммирования, то необходимо добавить в структуру системы лишний сумматор. Или если нужна дополнительная функция хранения кода в течение одного такта, то мы должны добавить в структуру еще один регистр. Естественно, это практически невозможно сделать в процессе эксплуатации, обязательно нужен новый производственный цикл проектирования, изготовления, отладки всей системы. Именно поэтому традиционная цифровая система часто называется системой на «жесткой логике».
Любая система на «жесткой логике» обязательно представляет собой специализированную систему, настроенную исключительно на одну задачу или (реже) на несколько близких, заранее известных задач. Это имеет свои бесспорные преимущества.
Во-первых, специализированная система (в отличие от универсальной) никогда не имеет аппаратурной избыточности, то есть каждый ее элемент обязательно работает в полную силу (конечно, если эта система грамотно спроектирована).
Во-вторых, именно специализированная система может обеспечить максимально высокое быстродействие, так как скорость выполнения алгоритмов обработки информации определяется в ней только быстродействием отдельных логических элементов и выбранной схемой путей прохождения информации. А именно логические элементы всегда обладают максимальным на данный момент быстродействием.
Но в то же время большим недостатком цифровой системы на «жесткой логике» является то, что для каждой новой задачи ее надо проектировать и изготавливать заново. Это процесс длительный, дорогостоящий, требующий высокой квалификации исполнителей. А если решаемая задача вдруг изменяется, то вся аппаратура должна быть полностью заменена. В нашем быстро меняющемся мире это довольно расточительно.
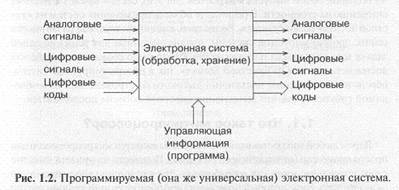
Путь преодоления этого недостатка довольно очевиден: надо построить такую систему, которая могла бы легко адаптироваться под любую задачу, перестраиваться с одного алгоритма работы на другой без изменения аппаратуры. И задавать тот или иной алгоритм мы тогда могли бы путем ввода в систему некой дополнительной управляющей информации, программы работы системы (рис. 1.2). Тогда система станет универсальной, или программируемой, не жесткой, а гибкой. Именно это и обеспечивает микропроцессорная система.
Но любая универсальность обязательно приводит к избыточности. Ведь решение максимально трудной задачи требует гораздо больше средств, чем решение максимально простой задачи. Поэтому сложность универсальной системы должна быть такой, чтобы обеспечивать решение самой трудной задачи, а при решении простой задачи система будет работать далеко не в полную силу, будет использовать не все свои ресурсы. И чем проще решаемая задача, тем больше избыточность, и тем менее оправданной становится универсальность. Избыточность ведет к увеличению стоимости системы, снижению ее надежности, увеличению потребляемой мощности и т.д.
Кроме того, универсальность, как правило, приводит к существенному снижению быстродействия. Оптимизировать универсальную систему так, чтобы каждая новая задача решалась максимально быстро, попросту невозможно. Общее правило таково: чем больше универсальность, гибкость, тем меньше быстродействие. Более того, для универсальных систем не существует таких задач (пусть даже и самых простых), которые бы они решали с максимально возможным быстродействием; За все приходится платить.
Таким образом, можно сделать следующий вывод. Системы на «жесткой логике» хороши там, где решаемая задача не меняется длительное время, где требуется самое высокое быстродействие, где алгоритмы обработки информации предельно просты. А универсальные, программируемые системы хороши там, где часто меняются решаемые задачи, где высокое быстродействие не слишком важно, где алгоритмы обработки информации сложные. То есть любая система хороша на своем месте.
Однако за последние десятилетия быстродействие универсальных (микропроцессорных) систем сильно выросло (на несколько порядков). К тому же большой объем выпуска микросхем для этих систем привел к резкому снижению их стоимости. В результате область применения систем на «жесткой логике» резко сузилась. Более того, высокими темпами развиваются сейчас программируемые системы, предназначенные для решения одной задачи или нескольких близких задач. Они удачно совмещают в себе как достоинства систем на «жесткой логике», так и программируемых систем, обеспечивая сочетание достаточно высокого быстродействия и необходимой гибкости. Так что вытеснение «жесткой логики» продолжается.
1.1. Что такое микропроцессор?
Ядром любой микропроцессорной системы является микропроцессор или просто процессор (от английского processor). Перевести на русский язык это слово правильнее всего как «обработчик», так как именно микропроцессор — это тот узел, блок, который производит всю обработку информации внутри микропроцессорной системы. Остальные узлы выполняют всего лишь вспомогательные функции: хранение информации (в том числе и управляющей информации, то есть программы), связи с внешними устройствами, связи с пользователем и т.д. Процессор заменяет практически всю «жесткую логику», которая понадобилась бы в случае традиционной цифровой системы. Он выполняет арифметические функции (сложение, умножение и тд.), логические функции (сдвиг, сравнение, маскирование кодов и т.д.), временное хранение кодов (во внутренних регистрах), пересылку кодов между узлами микропроцессорной системы и многое другое. Количество таких элементарных операций, выполняемых процессором, может достигать нескольких сотен. Процессор можно сравнить с мозгом системы.
Но при этом надо учитывать, что все свои операции процессор выполняет последовательно, то есть одну за другой, по очереди. Конечно, существуют процессоры с параллельным выполнением некоторых операций, встречаются также микропроцессорные системы, в которых несколько процессоров работают над одной задачей параллельно, но это редкие исключения. С одной стороны, последовательное выполнение операций— несомненное достоинство, так как позволяет с помощью всего одного процессора выполнять любые, самые сложные алгоритмы обработки информации. Но, с другой стороны, последовательное выполнение операций приводит к тому, что время выполнения алгоритма зависит от его сложности. Простые алгоритмы выполняются быстрее сложных. То есть микропроцессорная система способна сделать все, но работает она не слишком быстро, ведь все информационные потоки приходится пропускать через одинединственный узел — микропроцессор (рис. 1.3). В традиционной цифровой системе можно легко организовать параллельную обработку всех потоков информации, правда, ценой усложнения схемы.

Итак, микропроцессор способен выполнять множество операций. Но откуда он узнает, какую операцию ему надо выполнять в данный момент? Именно это определяется управляющей информацией, программой. Программа представляет собой набор команд (инструкций), то есть цифровых кодов, расшифровав которые, процессор узнает, что ему надо делать. Программа от начала и до конца составляется человеком, программистом, а процессор выступает в роли послушного исполнителя этой программы, никакой инициативы он не проявляет (если, конечно, исправен). Поэтому сравнение процессора с мозгом не слишком корректно. Он всего лишь исполнитель того алгоритма, который заранее составил для него человек. Любое отклонение от этого алгоритма может быть вызвано только неисправностью процессора или каких нибудь других узлов микропроцессорной системы.
Все команды, выполняемые процессором, образуют систему команд процессора. Структура и объем системы команд процессора определяют его быстродействие, гибкость, удобство использования. Всего команд у процессора может быть от нескольких десятков до нескольких сотен. Система команд может быть рассчитана на узкий круг решаемых задач (у специализированных процессоров) или на максимально широкий круг задач (у универсальных процессоров). Коды команд могут иметь различное количество разрядов (занимать от одного до нескольких байт). Каждая команда имеет свое время выполнения, поэтому время выполнения всей программы зависит не только от количества команд в программе, но и от того, какие именно команды используются.
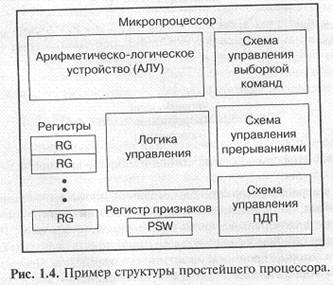
Для выполнения команд в структуру процессора входят внутренние регистры, арифметико-логическое устройство (АЛУ, ALU — Arithmetic Logic Unit), мультиплексоры, буферы, регистры и другие узлы. Работа всех узлов синхронизируется общим внешним тактовым сигналом процессора. То есть процессор представляет собой довольно сложное цифровое устройство (рис. 1.4).
Впрочем, для разработчика микропроцессорных систем информация о тонкостях внутренней структуры процессора не слишком важна. Разработчик должен рассматривать процессор как «черный ящик», который в ответ на входные и управляющие коды производит ту или иную операцию и выдает выходные сигналы. Разработчику необходимо знать систему команд, режимы работы процессора, а также правила взаимодействия процессора с внешним миром или, как их еще называют, протоколы обмена информацией. 0 внутренней структуре процессора надо знать только то, что необходимо для выбора той или иной команды, того или иного режима работы.
Для достижения максимальной универсальности и упрощения протоколов обмена информацией в микропроцессорных системах применяется так называемая шинная структура связей между отдельными устройствами, входящими в систему. Суть шинной структуры связей сводится к следующему.

При классической структуре связей (рис. 1.5) все сигналы и коды между устройствами передаются по отдельным линиям связи. Каждое устройство, входящее в систему, передает свои сигналы и коды независимо от других устройств. При этом в системе получается очень много линий связи и разных протоколов обмена информацией.
При шинной структуре связей (рис. 1.6) все сигналы между устройствами передаются по одним и тем же линиям связи, но в разное время (это называется мультиплексированной передачей). Причем передача по всем линиям связи может осуществляться в обоих направлениях (так называемая двунаправленная передача). В результате количество линий связи существенно сокращается, а правила обмена (протоколы) упрощаются. Группа линий связи, по которым передаются сигналы или коды как раз и называется шиной (англ. bus).
Понятно, что при шинной структуре связей легко осуществляется пересылка всех информационных потоков в нужном направлении, например, их можно пропустить через один процессор, что очень важно для микропроцессорной системы. Однако при шинной структуре связей вся информация передается по линиям связи последовательно во времени, по очереди, что снижает быстродействие системы по сравнению с классической структурой связей.

Большое достоинство шинной структуры связей состоит в том, что все устройства, подключенные к шине, должны принимать и передавать информацию по одним и тем же правилам (протоколам обмена информацией по шине). Соответственно, все узлы, отвечающие за обмен с шиной в этих устройствах, должны быть единообразны, унифицированы.
Существенный недостаток шинной структуры связан с тем, что все устройства подключаются к каждой линии связи параллельно. Поэтому любая неисправность любого устройства может вывести из строя всю систему, если она портит линию связи. По этой же причине отладка системы с шинной структурой связей довольно сложна и обычно требует специального оборудования.
В системах с шинной структурой связей применяют все три существующие разновидности выходных каскадов цифровых микросхем:
• стандартный выход или выход с двумя состояниями (обозначается 2С, 2S, реже ТТЛ, TTL);
• выход с открытым коллектором (обозначается ОК, ОС);
• выход с тремя состояниями или (что то же самое) с возможностью отключения (обозначается 3С, 3S).
Упрощенно эти три типа выходных каскадов могут быть представлены в виде схем на рис. 1.7.
У выхода 2С два ключа замыкаются по очереди, что соответствует уровням логической единицы (верхний ключ замкнут) и логического нуля (нижний ключ замкнут). У выхода ОК замкнутый ключ формирует уровень логического нуля, разомкнутый — логической единицы. У выхода 3С ключи могут замыкаться по очереди (как в случае 2С), а могут размыкаться одновременно, образуя третье, высокоимпедансное, состояние. Переход в третье состояние (Z-состояние) управляется сигналом на специальном входе EZ.

Выходные каскады типов 3С и ОК позволяют объединять несколько выходов микросхем для получения мультиплексированных (рис. 1.8) или двунаправленных (рис. 1.9) линий.
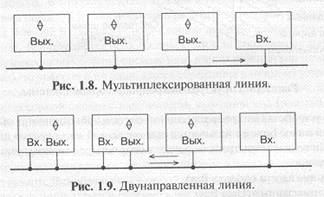
При этом в случае выходов 3С необходимо обеспечить, чтобы на линии всегда работал только один активный выход, а все остальные выходы находились бы в это время в третьем состоянии, иначе возможны конфликты. Объединенные выходы ОК могут работать все одновременно, без всяких конфликтов.
Типичная структура микропроцессорной системы приведена на рис. 1.10. Она включает в себя три основных типа устройств:
• процессор;
• память, включающую оперативную память (ОЗУ, RAM — Random Access Memory) и постоянную память (ПЗУ, ROM — Read Only Memory), которая служит для хранения данных и программ;
• устройства ввода/вывода (УВВ, I/О — Input/Output Devices), служащие для связи микропроцессорной системы с внешними устройствами, для приема (ввода, чтения, Read) входных сигналов и выдачи (вывода, записи, Write) выходных сигналов.

Все устройства микропроцессорной системы объединяются общей системной шиной (она же называется еще системной магистралью или каналом). Системная магистраль включает в себя четыре основные шины нижнего уровня:
• шина адреса (Address Bus);
• шина данных (Data Bus);
• шина управления (Control Bus);
• шина питания (Power Bus).
Шина адреса служит для определения адреса (номера) устройства, с которым процессор обменивается информацией в данный момент. Каждому устройству (кроме процессора), каждой ячейке памяти в микропроцессорной системе присваивается собственный адрес. Когда код какого то адреса выставляется процессором на шине адреса, устройство, которому этот адрес приписан, понимает, что ему предстоит обмен информацией. Шина адреса может быть однонаправленной или двунаправленной.
Шина данных — это основная шина, которая используется для передачи информационных кодов между всеми устройствами микропроцессорной системы. Обычно в пересылке информации участвует процессор, который передает код данных в какое-то устройство или в ячейку памяти или же принимает код данных из какого-то устройства или из ячейки памяти. Но возможна также и передача информации между устройствами без участия процессора. Шина данных всегда двунаправленная.
Шина управления в отличие от шины адреса и шины данных состоит из отдельных управляющих сигналов. Каждый из этих сигналов во время обмена информацией имеет свою функцию. Некоторые сигналы служат для стробирования передаваемых или принимаемых данных (то есть определяют моменты времени, когда информационный код выставлен на шину данных). Другие управляющие сигналы могут использоваться для подтверждения приема данных, для сброса всех устройств в исходное состояние, для тактирования всех устройств и т.д. Линии шины управления могут быть однонаправленными или двунаправленными.
Наконец, шина питания предназначена не для пересылки информационных сигналов, а для питания системы. Она состоит из линий питания и общего провода. В микропроцессорной системе может быть один источник питания (чаще +5 В) или несколько источников питания (обычно еще — 5 В, +12 В и — 12 В).
Каждому напряжению питания соответствует своя линия связи. Все устройства подключены к этим линиям параллельно.
Если в микропроцессорную систему надо ввести входной код (или входной сигнал), то процессор по шине адреса обращается к нужному устройству ввода/вывода и принимает по шине данных входную информацию. Если из микропроцессорной системы надо вывести выходной код (или выходной сигнал), то процессор обращается по шине адреса к нужному устройству ввода/вывода и передает ему по шине данных выходную информацию.
Если информация должна пройти сложную многоступенчатую обработку, то процессор может хранить промежуточные результаты в системной оперативной памяти. Для обращения к любой ячейке памяти процессор выставляет ее адрес на шину адреса и передает в нее информационный код по шине данных или же принимает из нее информационный код по шине данных. В памяти (оперативной и постоянной) находятся также и управляющие коды (команды выполняемой процессором программы), которые процессор также читает по шине данных с адресацией по шине адреса. Постоянная память используется в основном для хранения программы начального пуска микропроцессорной системы, которая выполняется каждый раз после включения питания. Информация в нее заносится изготовителем раз и навсегда.
Таким образом, в микропроцессорной системе все информационные коды и коды команд передаются по шинам последовательно, по очереди. Это определяет сравнительно невысокое быстродействие микропроцессорной системы. Оно ограничено обычно даже не быстродействием процессора (которое тоже очень важно) и не скоростью обмена по системной шине (магистрали), а именно последовательным характером передачи информации по системной шине (магистрали).
Важно учитывать, что устройства ввода/вывода чаще всего представляют собой устройства на «жесткой логике». На них может быть возложена часть функций, выполняемых микропроцессорной системой. Поэтому у разработчика всегда имеется возможность перераспределять функции системы между аппаратной и программное реализациями оптимальным образом. Аппаратная реализация ускоряет выполнение функции, но имеет недостаточную гибкость. Программная реализация значительно медленнее, но обеспечивает высокую гибкость. Аппаратная реализация функций увеличивает стоимость системы и ее энергопотребление, программная не увеличивает. Чаще всего применяется комбинирование аппаратных и программных функций.
Иногда устройства ввода/вывода имеют в своем составе процессор, то есть представляют собой небольшую специализированную микропроцессорную систему. Это позволяет переложить часть программных функций на устройства ввода/вывода, разгрузив центральный процессор системы.
1.3. Режимы работы микропроцессорной системы
Как уже отмечалось, микропроцессорная система обеспечивает большую гибкость работы, она способна настраиваться на любую задачу. Гибкость эта обусловлена прежде всего тем, что функции, выполняемые системой, определяются программой (программным обеспечением, software), которую выполняет процессор. Аппаратура (аппаратное обеспечение, hardware) остается неизменной при любой задаче. Записывая в память системы программу, можно заставить микропроцессорную систему выполнять любую задачу, поддерживаемую данной аппаратурой. К тому же шинная организация связей микропроцессорной системы позволяет довольно легко заменять аппаратные модули, например, заменять память на новую большего объема или более высокого быстродействия, добавлять или модернизировать устройства ввода/вывода, наконец, заменять процессор на более мощный. Это также позволяет увеличить гибкость системы, продлить ее жизнь при любом изменении требований к ней.
Но гибкость микропроцессорной системы определяется не только этим. Настраиваться на задачу помогает еще и выбор режима работы системы, то есть режима обмена информацией по системной магистрали (шине).
Практически любая развитая микропроцессорная система (в том числе и компьютер) поддерживает три основных режима обмена по магистрали:
• программный обмен информацией;
• обмен с использованием прерываний (Interrupts) ;
• обмен с использованием прямого доступа к памяти (ПДП, DMA Direct Memory Access).
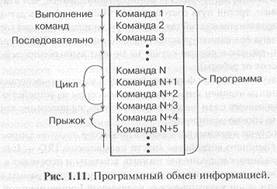
Программный обмен информацией является основным в любой микропроцессорной системе. Он предусмотрен всегда, без него невозможны другие режимы обмена. В этом режиме процессор является единоличным хозяином (или задатчиком, Master) системной магистрали. Все операции (циклы) обмена информацией в данном случае инициируются только процессором, все они выполняются строго в порядке, предписанном исполняемой программой.
Процессор читает (выбирает) из памяти коды команд и исполняет их, читая данные из памяти или из устройства ввода/вывода, обрабатывая их, записывая данные в память или передавая их в устройство ввода/вывода. Путь процессора по программе может быть линейным, циклическим, может содержать переходы (прыжки), но он всегда непрерывен и полностью находится под контролем процессора. Ни на какие внешние события, не связанные с программой, процессор не реагирует (рис. 1.11). Все сигналы на магистрали в данном случае контролируются процессором.
Обмен по прерываниям используется тогда, когда необходима реакция микропроцессорной системы на какое-то внешнее событие, на приход внешнего сигнала. В случае компьютера внешним событием может быть, например, нажатие на клавишу клавиатуры или приход по локальной сети пакета данных. Компьютер должен реагировать на это, соответственно, выводом символа на экран или же чтением и обработкой принятого по сети пакета.
В общем случае организовать реакцию на внешнее событие можно тремя различными путями:
• с помощью постоянного программного контроля факта наступления события (так называемый метод опроса флага или polling);
• с помощью прерывания, то есть насильственного перевода процессора с выполнения текущей программы на выполнение экстренно необходимой программы;
• с помощью прямого доступа к памяти, то есть без участия процессора при его отключении от системной магистрали.
Проиллюстрировать эти три способа можно следующим простым примером. Допустим, вы готовите себе завтрак, поставив на плиту кипятиться молоко. Естественно, на закипание молока надо реагировать, причем срочно. Как это организовать? Первый путь — постоянно следить за молоком, но тогда вы ничего другого не сможете делать. Правильнее будет регулярно поглядывать на молоко, делая одновременно что-то другое. Это программный режим с опросом флага. Второй путь — установить на кастрюлю с молоком датчик, который подаст звуковой сигнал при закипании молока, и спокойно заниматься другими делами. Услышав сигнал, вы выключите молоко. Правда, возможно, вам придется сначала закончить то, что вы начали делать, так что ваша реакция будет медленнее, чем в первом случае. Наконец, третий путь состоит в том, чтобы соединить датчик на кастрюле с управлением плитой так, чтобы при закипании молока горелка была выключена без вашего участия (правда, аналогия с ПДП здесь не очень точная, так как в данном случае на момент выполнения действия вас не отвлекают от работы).
Первый случай с опросом флага реализуется в микропроцессорной системе постоянным чтением информации процессором из устройства ввода/вывода, связанного с тем внешним устройством, на поведение которого необходимо срочно реагировать.
Во втором случае в режиме прерывания процессор, получив запрос прерывания от внешнего устройства (часто называемый IRQ — Interrupt ReQuest), заканчивает выполнение текущей команды и переходит к программе обработки прерывания. Закончив выполнение программы обработки прерывания, он возвращается к прерванной программе с той точки, где его прервали (рис. 1.12).
Здесь важно то, что вся работа, как и в случае программного режима, осуществляется самим процессором, внешнее событие просто временно отвлекает его. Реакция на внешнее событие по прерыванию в общем случае медленнее, чем при программном режиме. Как и в случае программного обмена, здесь все сигналы на магистрали выставляются процессором, то есть он полностью контролирует магистраль.
Для обслуживания прерываний в систему иногда вводится специальный модуль контроллера прерываний, но он в обмене информацией не участвует. Его задача состоит в том, чтобы упростить работу процессора с внешними запросами прерываний. Этот контроллер обычно программно управляется процессором по системной магистрали.

Естественно, никакого ускорения работы системы прерывание не дает. Его применение позволяет только отказаться от постоянного опроса флага внешнего события и временно, до наступления внешнего события, занять процессор выполнением каких-то других задач.
Прямой доступ к памяти (ПДП, DMA) — это режим, принципиально отличающийся от двух ранее рассмотренных режимов тем, что обмен по системной шине идет без участия процессора. Внешнее устройство, требующее обслуживания, сигнализирует процессору, что режим ПДП необходим, в ответ на это процессор заканчивает выполнение текущей команды и отключается от всех шин, сигнализируя запросившему устройству, что обмен в режиме ПДП можно начинать.
Операция ПДП сводится к пересылке информации из устройства ввода/ вывода в память или же из памяти в устройство ввода/вывода. Когда пересылка информации будет закончена, процессор вновь возвращается к прерванной программе, продолжая ее с той точки, где его прервали (рис. 1.13). Это похоже на режим обслуживания прерываний, но в данном случае процессор не участвует в обмене. Как и в случае прерываний, реакция на внешнее событие при ПДП существенно медленнее, чем при программном режиме.
Понятно, что в этом случае требуется введение в систему дополнительного устройства (контроллера ПДП), которое будет осуществлять полноценный обмен по системной магистрали без всякого участия процессора. Причем процессор предварительно должен сообщить этому контроллеру ПДП, откуда ему следует брать информацию и/или куда ее следует помещать. Контроллер ПДП может считаться специализированным процессором, который отличается тем, что сам не участвует в обмене, не принимает в себя информацию и не выдает ее (рис. 1.14).

В принципе контроллер ПДП может входить в состав устройства ввода/вывода, которому необходим режим ПДП или даже в состав нескольких устройств ввода/вывода.
Теоретически обмен с помощью прямого доступа к памяти может обеспечить более высокую скорость передачи информации, чем программный обмен, так как процессор передает данные медленнее, чем специализированный контроллер ПДП. Однако на практике это преимущество
• реализуется далеко не всегда. Скорость обмена в режиме ПДП обычно ограничена возможностями магистрали. К тому же необходимость программного задания режимов контроллера ПДП может свести на нет выигрыш от более высокой скорости пересылки данных в режиме ПДП. Поэтому режим ПДП применяется редко.
Если в системе уже имеется самостоятельный контроллер ПДП, то это может в ряде случаев существенно упростить аппаратуру устройств ввода/ вывода, работающих в режиме ПДП. В этом, пожалуй, состоит единственное бесспорное преимущество режима ПДП.
1.4. Архитектура микропроцессорных систем
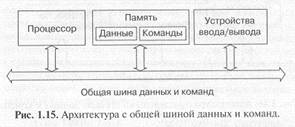
До сих пор мы рассматривали только один тип архитектуры микропроцессорных систем — архитектуру с общей, единой шиной для данных и команд (одношинную, или принстонскую, фон-неймановскую архитектуру). Соответственно, в составе системы в этом случае присутствует одна общая память, как для данных, так и для команд (рис. 1.15).
Но существует также и альтернативный тип архитектуры микропроцессорной системы — это архитектура с раздельными шинами данных и команд (двухшинная, или гарвардская, архитектура). Эта архитектура предполагает наличие в системе отдельной памяти для данных и отдельной памяти для команд (рис. 1.16). Обмен процессора с каждым из двух типов памяти происходит по своей шине.
Архитектура с общей шиной распространена гораздо больше, она применяется, например, в персональных компьютерах и в сложных микро компьютерах. Архитектура с раздельными шинами применяется в основном в однокристальных микроконтроллерах.
Рассмотрим некоторые достоинства и недостатки обоих архитектурных решений.
Архитектура с общей шиной (принстонская, фон-неймановская) проще, она не требует от процессора одновременного обслуживания двух шин, контроля обмена по двум шинам сразу. Наличие единой памяти данных и команд позволяет гибко распределять ее объем между кодами данных и команд. Например, в некоторых случаях нужна большая и сложная программа, а данных в памяти надо хранить не слишком много. В других случаях, наоборот, программа требуется простая, но необходимы большие объемы хранимых данных. Перераспределение памяти не вызывает никаких проблем, главное — чтобы программа и данные вместе помещались в памяти системы. Как правило, в системах с такой архитектурой память бывает довольно большого объема (до десятков и сотен мегабайт). Это позволяет решать самые сложные задачи.

Архитектура с раздельными шинами данных и команд сложнее, она заставляет процессор работать одновременно с двумя потоками кодов, обслуживать обмен по двум шинам одновременно. Программа может размещаться только в памяти команд, данные — только в памяти данных. Такая узкая специализация ограничивает круг задач, решаемых системой, так как не дает возможности гибкого перераспределения памяти. Память данных и память команд в этом случае имеют не слишком большой объем, поэтому применение систем с данной архитектурой ограничивается обычно не слишком сложными задачами.
В чем же преимущество архитектуры с двумя шинами (гарвардской)? В первую очередь, в быстродействии.
Дело в том, что при единственной шине команд и данных процессор вынужден по одной этой шине принимать данные (из памяти или устройства ввода/вывода) и передавать данные (в память или в устройство ввода/ вывода), а также читать команды из памяти. Естественно, одновременно эти пересылки кодов по магистрали происходить не могут, они должны производиться по очереди. Современные процессоры способны совместить во времени выполнение команд и проведение циклов обмена по системной шине. Использование конвейерных технологий и быстрой кэш памяти позволяет им ускорить процесс взаимодействия со сравнительно медленной системной памятью. Повышение тактовой частоты и совершенствование структуры процессоров дают возможность сократить время выполнения команд. Но дальнейшее увеличение быстродействия системы возможно только при совмещении пересылки данных и чтения команд, то есть при переходе к архитектуре с двумя шинами.
В случае двухшинной архитектуры обмен по обеим шинам может быть независимым, параллельным во времени. Соответственно, структуры шин (количество разрядов кода адреса и кода данных, порядок и скорость обмена информацией и т.д.) могут быть выбраны оптимально для той задачи, которая решается каждой шиной. Поэтому при прочих равных условиях переход на двухшинную архитектуру ускоряет работу микропроцессорной системы, хотя и требует дополнительных затрат на аппаратуру, усложнения структуры процессора. Память данных в этом случае имеет свое распределение адресов, а память команд — свое.
Проще всего преимущества двухшинной архитектуры реализуются внутри одной микросхемы. В этом случае можно также существенно уменьшить влияние недостатков этой архитектуры. Поэтому основное ее применение — в микроконтроллерах, от которых не требуется решения слишком сложных задач, но зато необходимо максимальное быстродействие при заданной тактовой частоте.
1.5. Типы микропроцессорных систем
Диапазон применения микропроцессорной техники сейчас очень широк, требования к микропроцессорным системам предъявляются самые разные. Поэтому сформировалось несколько типов микропроцессорных систем, различающихся мощностью, универсальностью, быстродействием и структурными отличиями. Основные типы следующие:
• микроконтроллеры — наиболее простой тип микропроцессорных систем, в которых все или большинство узлов системы выполнены в виде одной микросхемы;
• контроллеры — управляющие микропроцессорные системы, выполненные в виде отдельных модулей;
• микрокомпьютеры — более мощные микропроцессорные системы с развитыми средствами сопряжения с внешними устройствами.
• компьютеры (в том числе персональные) — самые мощные и наиболее универсальные микропроцессорные системы.
Четкую границу между этими типами иногда провести довольно сложно. Быстродействие всех типов микропроцессоров постоянно растет, и нередки ситуации, когда новый микроконтроллер оказывается быстрее, например, устаревшего персонального компьютера. Но кое какие принципиальные отличия все-таки имеются.
Микроконтроллеры представляют собой универсальные устройства, которые практически всегда используются не сами по себе, а в составе более сложных устройств, в том числе и контроллеров. Системная шина микроконтроллера скрыта от пользователя внутри микросхемы. Возможности подключения внешних устройств к микроконтроллеру ограничены. Устройства на микроконтроллерах обычно предназначены для решения одной задачи.
Контроллеры, как правило, создаются для решения какой-то отдельной задачи или группы близких задач. Они обычно не имеют возможностей подключения дополнительных узлов и устройств, например, большой памяти, средств ввода/вывода. Их системная шина чаще всего недоступна пользователю. Структура контроллера проста и оптимизирована под максимальное быстродействие. В большинстве случаев выполняемые программы хранятся в постоянной памяти и не меняются. Конструктивно контроллеры выпускаются в одноплатном варианте.
Микрокомпьютеры отличаются от контроллеров более открытой структурой, они допускают подключение к системной шине нескольких дополнительных устройств. Производятся микрокомпьютеры в каркасе, корпусе с разъемами системной магистрали, доступными пользователю. Микрокомпьютеры могут иметь средства хранения информации на магнитных носителях (например, магнитные диски) и довольно развитые средства связи с пользователем (видеомонитор, клавиатура). Микрокомпьютеры рассчитаны на широкий круг задач, но в отличие от контроллеров, к каждой новой задаче его надо приспосабливать заново. Выполняемые микрокомпьютером программы можно легко менять.
Наконец, компьютеры и самые распространенные из них — персональные компьютеры — это самые универсальные из микропроцессорных систем. Они обязательно предусматривают возможность модернизации, а также широкие возможности подключения новых устройств. Их системная шина, конечно, доступна пользователю. Кроме того, внешние устройства могут подключаться к компьютеру через несколько встроенных портов связи (количество портов доходит иногда до 10). Компьютер всегда имеет сильно развитые средства связи с пользователем, средства длительного хранения информации большого объема, средства связи с другими компьютерами по информационным сетям. Области применения компьютеров могут быть самыми разными: математические расчеты, обслуживание доступа к базам данных, управление работой сложных электронных систем, компьютерные игры, подготовка документов и т.д.
Любую задачу в принципе можно выполнить с помощью каждого из перечисленных типов микропроцессорных систем. Но при выборе типа надо по возможности избегать избыточности и предусматривать необходимую для данной задачи гибкость системы.
В настоящее время при разработке новых микропроцессорных систем чаще всего выбирают путь использования микроконтроллеров (примерно в 80% случаев). При этом микроконтроллеры применяются или самостоятельно, с минимальной дополнительной аппаратурой, или в составе более сложных контроллеров с развитыми средствами ввода/вывода.
Классические микропроцессорные системы на базе микросхем процессоров и микропроцессорных комплектов выпускаются сейчас довольно редко, в первую очередь, из-за сложности процесса разработки и отладки этих систем. Данный тип микропроцессорных систем выбирают в основном тогда, когда микроконтроллеры не могут обеспечить требуемых характеристик.
Наконец, заметное место занимают сейчас микропроцессорные системы на основе персонального компьютера. Разработчику в этом случае нужно только оснастить персональный компьютер дополнительными устройствами сопряжения, а ядро микропроцессорной системы уже готово. Персональный компьютер имеет развитые средства программирования, что существенно упрощает задачу разработчика. К тому же он может обеспечить самые сложные алгоритмы обработки информации. Основные недостатки персонального компьютера — большие размеры корпуса и аппаратурная избыточность для простых задач. Недостатком является и неприспособленность большинства персональных компьютеров к работе в сложных условиях (запыленность, высокая влажность, вибрации, высокие температуры и т.д.). Однако выпускаются и специальные персональные компьютеры, приспособленные к различным условиям эксплуатации.
Глава 2. Организация обмена информацией
Лекция 2. Шины микропроцессорной системы и циклы обмена
В этой лекции речь идет об обмене информацией по шинам микропроцессорных систем, о циклах обмена информацией и их фазах, о принципах синхронизации обмена, принципах организации прерываний и ПДП.
Ключевые слова: мультиплексирование, синхронный и асинхронный обмен, циклы ввода и вывода, векторное и радиальное прерывания, запросы прерывания и ПДП.
Самое главное, что должен знать разработчик микропроцессорных систем — это принципы организации обмена информацией по шинам таких систем. Без этого невозможно разработать аппаратную часть системы, а без аппаратной части не будет работать никакое программное обеспечение.
За более чем 30 лет, прошедших с момента появления первых микро процессоров, были выработаны определенные правила обмена, которым следуют и разработчики новых микропроцессорных систем. Правила эти не слишком сложны, но твердо знать и неукоснительно соблюдать их для успешной работы необходимо. Как показала практика, принципы организации обмена по шинам гораздо важнее, чем особенности конкретных микропроцессоров. Стандартные системные магистрали живут гораздо дольше, чем тот или иной процессор. Разработчики новых процессоров ориентируются на уже существующие стандарты магистрали. Более того, некоторые системы на основе совершенно разных процессоров используют одну и ту же системную магистраль. То есть магистраль оказывается самым главным системообразующим фактором в микропроцессорных системах.
Обмен информацией в микропроцессорных системах происходит в циклах обмена информацией. Под циклом обмена информацией понимается временной интервал, в течение которого происходит выполнение одной элементарной операции обмена по шине. Например, пересылка кода данных из процессора в память или же пересылка кода данных из устройства ввода/вывода в процессор. В пределах одного цикла также может передаваться и несколько кодов данных, даже целый массив данных, но это встречается реже.
Циклы обмена информацией делятся на два основных типа:
• Цикл записи (вывода), в котором процессор записывает (выводит) информацию;
• Цикл чтения (ввода), в котором процессор читает (вводит) информацию.
В некоторых микропроцессорных системах существует также цикл «чтение-модификация-запись» или же «ввод-пауза-вывод». В этих циклах процессор сначала читает информацию из памяти или устройства ввода/вывода, затем как-то преобразует ее и снова записывает по тому же адресу. Например, процессор может прочитать код из ячейки памяти, увеличить его на единицу и снова записать в эту же ячейку памяти. Наличие или отсутствие данного типа цикла связано с особенностями используемого процессора.
Особое место занимают циклы прямого доступа к памяти (если режим ПДП в системе предусмотрен) и циклы запроса и предоставления прерывания (если прерывания в системе есть). Когда в дальнейшем речь пойдет о таких циклах, это будет специально оговорено.
Во время каждого цикла устройства, участвующие в обмене информацией, передают друг другу информационные и управляющие сигналы в строго установленном порядке или, как еще говорят, в соответствии с принятым протоколом обмена информацией.
Длительность цикла обмена может быть постоянной или переменной, но она всегда включает в себя несколько периодов сигнала тактовой частоты системы. То есть даже в идеальном случае частота чтения информации процессором и частота записи информации оказываются в несколько раз меньше тактовой частоты системы.
Чтение кодов команд из памяти системы также производится с помощью циклов чтения. Поэтому в случае одношинной архитектуры на системной магистрали чередуются циклы чтения команд и циклы пересылки (чтения и записи) данных, но протоколы обмена остаются неизменными независимо от того, что передается — данные или команды. В случае двухшинной архитектуры циклы чтения команд и записи или чтения данных разделяются по разным шинам и могут выполняться одновременно.
2.1. Шины микропроцессорной системы
Прежде чем переходить к особенностям циклов обмена, остановимся подробнее на составе и назначении различных шин микропроцессорной системы.
Как уже упоминалось, в системную магистраль (системную шину) микропроцессорной системы входит три основные информационные шины: адреса, данных и управления.
Шина данных — это основная шина, ради которой и создается вся система. Количество ее разрядов (линий связи) определяет скорость и эффективность информационного обмена, а также максимально возможное количество команд. Ф
Шина данных всегда двунаправленная, так как предполагает передачу информации в обоих направлениях. Наиболее часто встречающийся тип выходного каскада для линий этой шины — выход с тремя состояниями.
Обычно шина данных имеет 8, 16, 32 или 64 разряда. Понятно, что за один цикл обмена по 64-разрядной шине может передаваться 8 байт информации, а по 8-разрядной — только один байт. Разрядность шины данных определяет и разрядность всей магистрали. Например, когда говорят о 32-разрядной системной магистрали, подразумевается, что она имеет 32 разрядную шину данных.
Шина адреса — вторая по важности шина, которая определяет максимально возможную сложность микропроцессорной системы, то есть допустимый объем памяти и, следовательно, максимально возможный размер программы и максимально возможный объем запоминаемых данных. Количество адресов, обеспечиваемых шиной адреса, определяется как 2N, где N — количество разрядов. Например, 16-разрядная шина адреса обеспечивает 65 536 адресов. Разрядность шины адреса обычно кратна 4 и может достигать 32 и даже 64.
Шина адреса может быть однонаправленной (когда магистралью всегда управляет только процессор) или двунаправленной (когда процессор может временно передавать управление магистралью другому устройству, например контроллеру ПДП). Наиболее часто используются типы выходных каскадов с тремя состояниями или обычные ТТЛ (с двумя состояниями).
Как в шине данных, так и в шине адреса может использоваться положительная логика или отрицательная логика. При положительной логике высокий уровень напряжения соответствует логической единице на соответствующей линии связи, низкий — логическому нулю. При отрицательной логике — наоборот. В большинстве случаев уровни сигналов на шинах — ТТЛ.
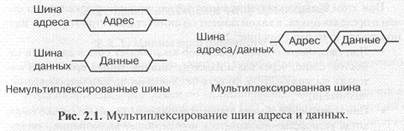
Для снижения общего количества линий связи магистрали часто применяется мультиплексирование шин адреса и данных. То есть одни и те же линии связи используются в разные моменты времени для передачи как адреса, так и данных (в начале цикла — адрес, в конце цикла — данные). Для фиксации этих моментов (стробирования) служат специальные сигналы на шине управления. Понятно, что мультиплексированная шина адреса/данных обеспечивает меньшую скорость обмена, требует более длительного цикла обмена (рис. 2.1). По типу шины адреса и шины данных все магистрали также делятся на мультиплексированные и не мультиплексированные.
В некоторых мультиплексированных магистралях после одного кода адреса передается несколько кодов данных (массив данных). Это позволяет существенно повысить быстродействие магистрали. Иногда в магистралях применяется частичное мультиплексирование, то есть часть разрядов данных передается по не мультиплексированным линиям, а другая часть — по мультиплексированным с адресом линиям.
Шина управления — это вспомогательная шина, управляющие сигналы на которой определяют тип текущего цикла и фиксируют моменты времени, соответствующие разным частям или стадиям цикла. Кроме того, управляющие сигналы обеспечивают согласование работы процессора (или другого хозяина магистрали, задатчика, master) с работой памяти или устройства ввода/вывода (устройства-исполнителя, slave). Управляющие сигналы также обслуживают запрос и предоставление прерываний, запрос и предоставление прямого доступа.
Сигналы шины управления могут передаваться как в положительной логике (реже), так и в отрицательной логике (чаще). Линии шины управления могут быть как однонаправленными, так и двунаправленными. Типы выходных каскадов могут быть самыми разными: с двумя состояниями (для однонаправленных линий), с тремя состояниями (для двунаправленных линий), с открытым коллектором (для двунаправленных и мультиплексированных линий).
Самые главные управляющие сигналы — это стробы обмена, то есть сигналы, формируемые процессором и определяющие моменты времени, в которые производится пересылка данных по шине данных, обмен данными. Чаще всего в магистрали используются два различных строба обмена:
• Строб записи (вывода), который определяет момент времени, когда устройство-исполнитель может принимать данные, выставленные процессором на шину данных;
• Строб чтения (ввода), который определяет момент времени, когда устройство-исполнитель должно выдать на шину данных код данных, который будет прочитан процессором.
При этом большое значение имеет то, как процессор заканчивает обмен в пределах цикла, в какой момент он снимает свой строб обмена. Возможны два пути решения (рис. 2.2):
• При синхронном обмене процессор заканчивает обмен данными самостоятельно, через раз и навсегда установленный временной интервал выдержки (t ), то есть без учета интересов устройства-исполнителя;
• При асинхронном обмене процессор заканчивает обмен только тогда, когда устройство-исполнитель подтверждает выполнение операции специальным сигналом (так называемый режим handshake— рукопожатие).

Достоинства синхронного обмена — более простой протокол обмена, меньшее количество управляющих сигналов. Недостатки — отсутствие гарантии, что исполнитель выполнил требуемую операцию, а также высокие требования к быстродействию исполнителя.
Достоинства асинхронного обмена — более надежная пересылка данных, возможность работы с самыми разными по быстродействию исполнителями. Недостаток — необходимость формирования сигнала подтверждения всеми исполнителями, то есть дополнительные аппаратурные затраты.
Какой тип обмена быстрее, синхронный или асинхронный? Ответ на этот вопрос неоднозначен. С одной стороны, при асинхронном обмене требуется какое-то время на выработку, передачу дополнительного сигнала и на его обработку процессором. С другой стороны, при синхронном обмене приходится искусственно увеличивать длительность строба обмена для соответствия требованиям большего числа исполнителей, чтобы они успевали обмениваться информацией в темпе процессора. Поэтому иногда в магистрали предусматривают возможность как синхронного, так и асинхронного обмена, причем синхронный обмен является основным и довольно быстрым, а асинхронный применяется только для медленных исполнителей.
По используемому типу обмена магистрали микропроцессорных систем также делятся на синхронные и асинхронные.
2.2.1. Циклы программного обмена
Рассмотрим для примера два довольно типичных случая программного обмена по магистрали микропроцессорной системы.
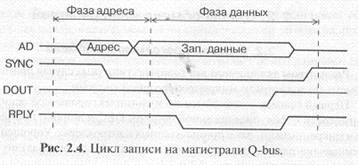
Первый пример — это обмен по мультиплексированной асинхронной магистрали Q-bus, предложенной фирмой DEC и широко применявшейся в микрокомпьютерах и промышленных контроллерах. Упрощенные временные диаграммы циклов чтения (ввода) и записи (вывода) по этой магистрали приведены на рис. 2.3 и 2.4.
Отметим, что в дальнейшем тексте знак «минус» перед названием сигнала говорит о том, что активный уровень сигнала низкий, пассивный— высокий, то есть сигнал отрицательный. Если минуса перед названием сигнала нет, то сигнал положительный, его низкий уровень пассивный, а высокий — активный.
На шине адреса/данных (AD) в начале цикла обмена (в фазе адреса) процессор (задатчик) выставляет код адреса. На этой шине используется отрицательная логика. Средний уровень сигналов на шине AD обозначает, что состояния сигналов на шине в данные временные интервалы не важны. Для стробирования адреса используется отрицательный синхросигнал -SYNC, выставляемый также процессором. Его передний (отрицательный) фронт соответствует действительности кода адреса на шине AD. Фаза адреса одинакова в обоих циклах записи и чтения.
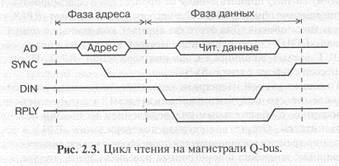
Получив (распознав) свой код адреса, устройство ввода/вывода или память (исполнитель) готовится к проведению обмена. Через некоторое время после начала (отрицательного фронта) сигнала -SYNC процессор снимает адрес и начинает фазу данных.
В фазе данных цикла чтения (рис. 2.3) процессор выставляет сигнал строба чтения данных -DIN, в ответ на который устройство, к которому обращается процессор (исполнитель), должно выставить свой код данных (читаемые данные). Одновременно это устройство должно подтвердить выполнение операции сигналом подтверждения обмена -RPLY.
Для сигнала -RPLY используется тип выходного каскада ОК, чтобы не было конфликтов между устройствами-исполнителями. Процессор, получив сигнал -RPLY, заканчивает цикл обмена. Для этого он снимает сигнал -DIN и сигнал -SYNC. Устройство-исполнитель в ответ на снятие сигнала -DIN должно снять код данных с шины AD и закончить сигнал подтверждения -RPLY. После этого процессор снимает сигнал -SYNC.
В фазе данных цикла записи (рис. 2.4) процессор выставляет на шину AD код записываемых данных и сопровождает его отрицательным сигналом строба записи данных -DOUT. Устройство-исполнитель должно по этому сигналу принять данные от процессора и сформировать сигнал подтверждения обмена -RPLY. Процессор, получив сигнал -RPLY, заканчивает цикл обмена. Для этого он снимает код данных с шины AD и сигнал -DOUT. Устройство-исполнитель в ответ на снятие сигнала -DOUT должно закончить сигнал подтверждения -RPLY. После этого процессор снимает сигнал -SYNC.
То есть на данной магистрали адрес передается синхронно (без подтверждения его получения исполнителем), а данные передаются асинхронно, с обязательным подтверждением их выдачи или приема исполнителем. Отсутствие сигнала подтверждения -RPLY в течение заданного времени воспринимается процессором как аварийная ситуация. В принципе возможна и асинхронная передача адреса, что увеличивает надежность обмена, хотя может снижать его скорость.
Помимо циклов чтения и записи на магистрали Q-bus используются также и циклы типа «ввод-пауза-вывод» («чтение-модификация-запись»). Упрощенная временная диаграмма этого цикла представлена на рис. 2.5.
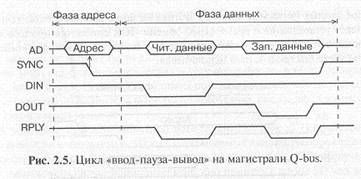
В этом цикле адресная фаза производится точно так же, как и в циклах чтения (ввода) и записи (вывода). Но в фазе данных процессор производит сначала чтение из заданного в адресной фазе адреса, а потом запись в тот же самый адрес. Для чтения используется строб чтения -DIN, а для записи — строб записи -DOUT. В ответ на сигнал -DIN устройство-исполнитель выдает свои данные на шину AD, а по сигналу -DOUT — принимает данные с шины AD. Как и в циклах чтения и записи, устройство исполнитель подтверждает выполнение каждой операции сигналом подтверждения -RPLY. Понятно, что цикл «ввод-пауза-вывод» требует больше времени, чем каждый из циклов чтения или записи, но меньше времени, чем два последовательно произведенных цикла чтения и записи (так как для него нужна только одна адресная фаза). Сигнал -SYNC вырабатывается процессором в начале цикла «ввод-пауза-вывод» и держится до окончания всего цикла.
В качестве второго примера рассмотрим циклы обмена на синхронной не мультиплексированной магистрали ISA (Industrial Standard Architecture), предложенной фирмой IВМ и широко используемой в персональных компьютерах. Упрощенные циклы записи в устройство ввода/вывода и чтения из устройства ввода/вывода приведены на рис. 2.6 и 2.7.
Оба цикла начинаются с выставления процессором (задатчиком) кода адреса на шину адреса SA (логика на этой шине положительная). Адрес остается на шине SA до конца цикла. Фаза адреса, одинаковая для обоих циклов, заканчивается с началом строба обмена данными -IOR или –IOW. В течение фазы адреса устройство-исполнитель должно принять код адреса и распознать или не распознать его. Если адрес распознан, исполнитель готовится к обмену.
В фазе данных цикла чтения (рис. 2.6) процессор выставляет отрицательный сигнал чтения данных из устройства ввода/вывода -IOR. В ответ на него устройство-исполнитель должно выдать на шину данных SD свой код данных (читаемые данные). Логика на шине данных положительная. Через установленное время строб обмена -IOR снимается процессором, после чего снимается также и код адреса с шины SA. Цикл заканчивается без учета быстродействия исполнителя.

Но так происходит только в случае основного, синхронного обмена. Кроме него на магистрали ISA также предусмотрена возможность асинхронного обмена. Для этого применяется сигнал готовности канала (магистрали) I/О СН RDY. Тип выходного каскада для данного сигнала — ОК, для предотвращения конфликтов между устройствами-исполнителями. При синхронном обмене сигнал!/О СН RDY всегда положительный. Но медленное устройство-исполнитель, не успевающее работать в темпе процессора, может этот сигнал снять, то есть сделать нулевым сразу после начала строба обмена. Тогда процессор до того момента, пока сигнал 1/О СН RDY не станет снова положительным, приостанавливает завершение цикла, продлевает строб обмена. Конечно, слишком большая длительность этого сигнала рассматривается как аварийная ситуация. Для простоты понимания можно считать, что устройство-исполнитель формирует в данном случае отрицательный сигнал неготовности завершить обмен. На время этого сигнала обмен на магистрали приостанавливается.
Принципиальное отличие асинхронного обмена по магистрали ISA от асинхронного обмена по магистрали Q-bus состоит в следующем. Если в случае Q-bus сигнал подтверждения обязателен, и его должен формировать каждый исполнитель, то в случае ISA сигнал о неготовности исполнитель может не формировать, если он успевает работать в темпе процессора. Зато в случае Q-bus к концу цикла обмена процессор всегда уверен, что устройство-исполнитель выполнило требуемую операцию, а в случае ISA такой уверенности нет.
В фазе данных цикла записи по магистрали ISA (рис. 2.7) процессор выставляет на шину данных SD код записываемых данных и сопровождает их стробом записи данных в устройство ввода/вывода -IOW. Получив этот сигнал, устройство-исполнитель должно принять с шины SD код записываемых данных. Если оно не успевает сделать это в темпе процессора, то оно может снять на нужное время сигнал I/О СН RDY после получения переднего фронта сигнала -IOW. Тогда процессор приостановит окончание цикла записи.
Рассмотренные примеры, конечно, не раскрывают всех тонкостей обмена по упомянутым магистралям. Они всего лишь иллюстрируют главные принципы обмена по ним.
2.2.2. Циклы обмена по прерываниям
Циклы обмена в режиме прерываний строятся по тем же принципам, что и циклы программного обмена, но имеют ряд специфических особенностей.
Прерывания в микропроцессорных системах бывают двух основных типов:
• векторные прерывания, которые требуют проведения цикла чтения по магистрали;
• радиальные прерывания, которые не требуют никакого цикла обмена по магистрали.
Дело в том, что прерываний в микропроцессорной системе обычно бывает много. Поэтому процессору необходима информация о номере (или, как еще говорят, об адресе вектора) конкретного прерывания. Эта информация может быть передана процессору двумя путями.
При векторном прерывании код номера прерывания передается процессору тем устройством ввода/вывода, которое данное прерывание запросило. Для этого процессор проводит цикл чтения по магистрали, и по шине данных получает код номера прерывания. Шина адреса в данном цикле обычно не используется, так как устройство, запросившее прерывание, и так знает, что процессор будет обращаться именно к нему. В этом случае в магистрали достаточно всего одной линии запроса прерывания для всех устройств ввода/вывода. Так организованы прерывания, например, в магистрали Q-bus.

Схема распространения сигналов, участвующих в прерываниях на магистрали Q-bus, показана на рис. 2.8. Упрощенная временная диаграмма цикла запроса и предоставления магистрали представлена на рис. 2.9.
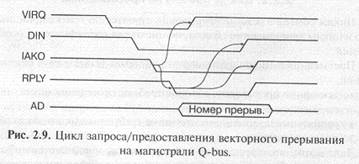
Запрос прерывания осуществляется отрицательным сигналом -VIRQ, который может формироваться каждым из устройств, запрашивающих прерывание. Тип выходного каскада для этого сигнала — ОК, чтобы избежать конфликтов между запрашивающими прерывания устройствами. Получив сигнал -VIRQ, процессор предоставляет прерывание (закончив предварительно выполнение текущей команды). Для этого он выставляет сигнал чтения данных -DIN и сигнал предоставления прерывания IАКО. Этот сигнал IАКО последовательно проходит через все устройства, которые могут запрашивать прерывания. Если устройство запросило прерывание, то оно не пропускает через себя этот сигнал. В результате получается, что если прерывания одновременно запросили два или более устройств, то сигнал предоставления прерывания получит только одно устройство, а именно то, которое ближе к процессору. Такой механизм разрешения конфликтов называется иногда географическим приоритетом (или цепочечным приоритетом, Daisy Chain). Получив сигнал IAKO, устройство, запросившее прерывание, должно снять свой сигнал -VIRQ.
Затем процессор проводит цикл безадресного чтения номера прерывания. В ответ на полученные сигналы -DIN и IAKO устройство, которому предоставлено прерывание, должно выдать на шину адреса/данных AD код номера прерывания (адреса вектора прерывания) и выставить сигнал подтверждения -RPLY. Процессор читает код номера прерывания и заканчивает цикл безадресного чтения снятием сигналов -DIN и IAKO.
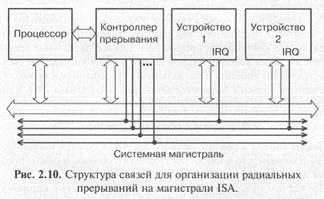
При радиальном прерывании в магистрали имеется столько линий запроса прерывания, сколько всего может быть разных прерываний. То есть каждое устройство ввода/вывода, желающее использовать прерывание, подает сигнал запроса прерывания по своей отдельной линии. Процессор узнает о номере прерывания по номеру линии, по которой пришел сигнал запроса прерывания. Никаких циклов обмена по магистрали при этом не требуется. В случае радиальных прерываний в систему обычно включается дополнительная микросхема контроллера прерываний, обрабатывающая сигналы запросов прерываний. Именно так организованы прерывания, например, в магистрали ISA.
Упрощенная структура связей между устройствами, участвующими в обмене по прерываниям, на магистрали ISA показана на рис. 2.10.
Процессор общается с контроллером прерываний как по магистрали (чтобы задать ему режимы работы), так и вне магистрали (при обработке запросов на прерывание). Сигналы запросов прерываний IRQ распределяются между всеми устройствами магистрали. На каждую линию IRQ приходится одно устройство. Тип выходного каскада для этих линий — 2С, так как конфликты здесь не предусмотрены. Запросом прерывания является передний, положительный фронт сигнала IRQ. При одновременном поступлении сигналов IRQ от нескольких устройств порядок их обслуживания определяется контроллером прерываний.
Какой тип прерываний лучше — векторный или радиальный? Векторные прерывания обеспечивают системе большую гибкость, в системе их может быть очень много. Но зато они требуют дополнительных аппаратурных узлов во всех устройствах, запрашивающих прерывания, для обслуживания циклов безадресного чтения.
Радиальных прерываний в системе обычно не очень много (от 1 до 16). При этом типе прерываний, как правило, требуется введение в систему специального контроллера прерываний. Каждое радиальное прерывание требует введения дополнительной линии в шину управления системной магистрали. Но работать с радиальными прерываниями проще, так как все сводится только к выработке единственного сигнала IRQ, и никаких циклов обмена по магистрали не требуется.
2.2.3. Циклы обмена в режиме ПДП
Циклы обмена в режиме прямого доступа к памяти выполняются по тем же правилам, что и циклы программного обмена, и циклы предоставления прерываний.
Прежде чем начать обмен в режиме ПДП, устройство, которому необходим ПДП, должно запросить ПДП и получить его. Процедура запроса и предоставления ПДП очень похожа на процедуру запроса и предоставления прерывания. В обоих случаях устройство, требующее обслуживания, посылает сигнал запроса процессору. Однако в случае ПДП процессор обязательно должен предоставить ПДП запросившему устройству с помощью специальных сигналов, так как на время ПДП процессор отключается от магистрали. А при радиальных прерываниях предоставления прерывания от процессора не требуется.
На магистрали Q-bus запрос и предоставление ПДП организуются подобно запросу и предоставлению прерывания. Упрощенная структура связей устройств, участвующих в ПДП, показана на рис. 2.11. Временная диаграмма запроса/предоставления ПДП очень близка к временной диаграмме запроса/пре доставления прерывания (см. рис. 2.9).

Сигнал запроса ПДП, называемый -DMR, передается всеми устройствами, нуждающимися в ПДП, по одной линии магистрали. Тип выходного каскада на этой линии — ОК. Процессор, получив сигнал -DMR, выдает сигнал предоставления ПДП DMGO, аналогичный сигналу 1АКО. Этот сигнал также проходит через все устройства последовательно, в результате чего ПДП получает только то устройство, которое находится ближе к процессору (географический приоритет). А затем устройство, получившее ПДП, проводит циклы обмена по магистрали, аналогично циклам программного обмена. В циклах ПДП информация читается из памяти и записывается в устройство ввода/вывода, или наоборот — читается из устройства ввода/вывода и передается в память.
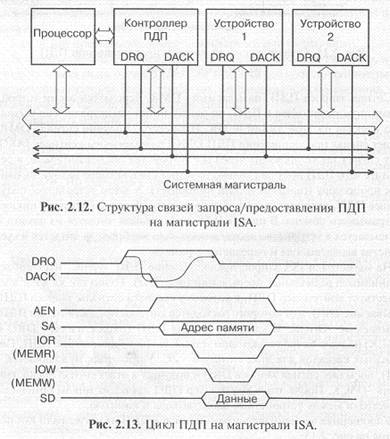
На магистрали ISA запрос/предоставление ПДП очень напоминает организацию радиальных прерываний (рис. 2.12). Точно так же в системе существует контроллер ПДП, к которому сходятся сигналы запроса ПДП, называемые DRQ, и от которого расходятся сигналы предоставления ПДП, называемые -РАСК. К каждому каналу ПДП (пара сигналов DRQ и -DACK) подключается только одно устройство, запрашивающее ПДП. Тип выходных каскадов для этих сигналов — 2С. Устройство, нуждающееся в ПДП, посылает сигнал запроса DRQ и получает в ответ сигнал предоставления -РАСК. После этого контроллер ПДП проводит циклы обмена по магистрали между устройством ввода/вывода и памятью.
Упрощенная временная диаграмма циклов ПДП на магистрали ISA показана на рис. 2.13.
На магистрали ISA используются раздельные стробы записи в память (-MEMW) и записи в устройства ввода/вывода (-IOW), а также раздельные стробы чтения из памяти (-MEMR) и чтения из устройств ввода/вывода (-IOR). Это позволяет за один цикл обмена ПДП читать информацию из памяти и записывать ее, в устройство ввода/вывода или же читать информацию из устройства ввода/вывода и записывать ее в память. При этом на шине адреса выставляется адрес памяти, а адрес устройства ввода/ вывода заменяется одним единственным сигналом AEN. Естественно, в цикле обмена в режиме ПДП участвует только то устройство ввода/вывода, которое предварительно запросило РДП и которому ПДП было предоставлено. Поэтому никаких конфликтов между устройствами ввода/вывода из-за такой упрощенной адресации не возникает.