ГЛАВА 10 ПРИНЦИПЫ ПОСТРОЕНИЯ КОММУТАЦИОННЫХ СИСТЕМ КВАЗИЭЛЕКТРОННЫХ И ЭЛЕКТРОННЫХ АТС
10.1. РОЛЬ ЭЛЕКТРОНИКИ В КОММУТАЦИОННОЙ ТЕХНИКЕ
Современный этап научно-технической революции характеризуется бурным развитием электронной техники, техники электронных вычислительных машин (ЭВМ), электронной автоматики. Большие достижения в этих областях открывают широкие возможности в технике автоматической коммутации для разработки быстродействующей, надежной и экономичной аппаратуры, отвечающей современным требованиям. Стремление использовать электронные и магнитные элементы в коммутационной технике объясняется, с одной стороны недостатками существующих электромеханических коммутационных приборов, а с другой — новыми возможностями, которые дает применение электронных элементов.
Основными недостатками электромеханических коммутационных узлов и станций телефонных и телеграфных сетей являются: трудоемкость производства искателей, соединителей и реле, вызванная сложностью их конструкции; недостаточная скорость работы электромеханических коммутационных приборов, что особенно сказывается в системах, имеющих общие управляющие устройства; большие расходы на эксплуатацию вследствие необходимости периодической регулировки и замены деталей подвижных частей искателей, соединителей и реле; сравнительно небольшой срок службы коммутационных приборов; недостаточная надежность, большие габариты и масса; ограниченные возможности в предоставлении абонентам дополнительных видов обслуживания.
По сравнению с электромеханическими коммутационными приборами электронные и магнитные приборы имеют следующие преимущества: отсутствие подвижных частей, а следовательно, и механических повреждений; высокое быстродействие; небольшие габариты и масса. Значительным преимуществом электронных приборов являются: высокая технологичность их производства; большая интеграция компонентов в одном корпусе; возможность использования печатного монтажа и других видов современной технологии. Указанные свойства электронных приборов позволяют разрабатывать коммутационное оборудование с лучшими характеристиками и возможностями, чем оборудование узлов и станций электромеханического типа.
Техника автоматической коммутации предъявляет к электронным и магнитным элементам целый ряд требований, основными из которых являются: постоянная готовность к действию при малом расходе электроэнергии; малые расходы на эксплуатацию; большой срок службы; высокая механическая прочность; отсутствие регулируемых и быстро изнашиваемых деталей; малое потребление электроэнергии; большие скорости работы при установлении и разъединении соединений; малая стоимость; высокая технологичность при производстве и монтаже оборудования; малые габариты и масса; достаточно высокий коммутационный коэффициент; высокая надежность.
Появление таких приборов, как транзисторы, полупроводниковые диоды, магнитные элементы с прямоугольной петлей гистерезиса ППГ и полупроводниковые (твердые) интегральные схемы, позволило использовать их для построения электронных, механоэлектронных, квазиэлектронных коммутационных узлов и станций сетей электросвязи. Особенно перспективным является использование больших интегральных электронных схем (БИС) с высокой степенью интеграции.
До последнего времени в большинстве случаев управляющие устройства АТС выполнялись как составная часть приборов коммутации (например, в АТС декадно-шаговой системы). Количество управляющих устройств в таких АТС определялось объемом коммутационных приборов, и проектирование их сводилось в основном к рациональному построению схем, обеспечивающих заданную последовательность работы коммутационного прибора (например, искателя) в процессе установления соединения. Синтез управляющих устройств сводился к синтезу индивидуальных управляющих устройств каждого коммутационного прибора.
Появление координатных коммутационных узлов (станций) с обходным принципом установления соединения позволило отделить приборы коммутации от управляющих устройств и создать централизованные управляющие устройства. Централизация управляющих устройств привела к значительному расширению их функций и, как следствие этого, к усложнению их схем, а также повышению требований к скорости работы элементов, на которых они реализуются. Так впервые возникла возможность практического использования электронных элементов, обладающих большой скоростью работы и большим сроком службы, в устройствах управления коммутационных станций. Сначала появились АТС- механоэлектронного типа, где коммутация разговорного тракта осуществляется приборами электромеханического действия (искателями или соединителями), а управление этими приборами обеспечивается полностью или частично электронными управляющими устройствами. Однако в механоэлектронных АТС полностью использовать быстродействие электронных управляющих устройств не удается в виду малой скорости работы приборов коммутации. Для согласования скорости работы электромеханических приборов коммутационной системы и управляющих устройств между ними устанавливаются согласующие (буферные) устройства.
Использование электронных элементов для коммутации разговорного тракта ограничено тем, что существующие электронные элементы не обеспечивают требуемого качества разговорного тракта и высоких технико-экономических показателей при большой ем- кости АТС. Вследствие этого в настоящее время ведутся работы по созданию квазиэлектронных АТС (КЭАТС), в которых коммутация разговорного тракта осуществляется быстродействующими реле с герметизированными или открытыми контактами, а для управления применяются электронные программные управляющие, устройства. Кроме того, ведутся работы по созданию высококачественного и экономичного электронного контакта и изысканию таких способов построения электронных АТС, которые позволяют снизить требование к электронному контакту. Одним из таких способов является импульсное преобразование разговорных токов и импульсно-временное разделение каналов.
В настоящее время создаются электронные коммутационные узлы и станции, в которых применяется электронное коммутационное и управляющее оборудование. При, этом информация на сети связи передается дискретными импульсными сигналами. Это позволяет использовать единую элементную базу и принципы построения каналообразующего, коммутационного и управляющего оборудования. Наметилась тенденция использования электронных управляющих машин в квазиэлектронных и электронных коммутационных станциях, что открывает широкие возможности для гибкого построения сетей связи, предоставления дополнительных видов обслуживания абонентам сети, введения и изменения категорий и приоритетов в обслуживании.
10.2. КЛАССИФИКАЦИЯ КВАЗИЭЛЕКТРОННЫХ АТС
В настоящее время ведутся интенсивные разработки по созданию и внедрению квазиэлектронных АТС различного назначения (городских, учрежденческих, сельских и междугородных). Классификация КЭАТС может быть произведена по большому числу признаков, основными из них являются способы построения коммутационной системы КС и управляющих устройств УУ. На рис. 10.1 приведена классификация КЭАТС по указанным признакам. Основной характеристикой коммутационной системы являются тип коммутационного прибора, используемого для ее построения,
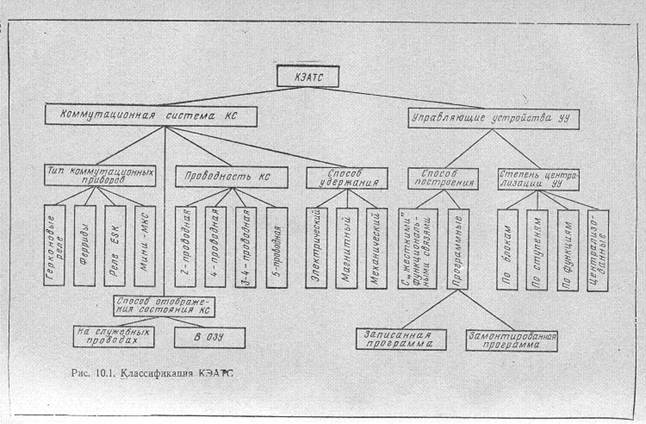
проводность КС, способ отображения состояния КС и способ удержания соединения.
Для построения КС могут использоваться герконовые реле, ферриды, реле Е5К, мини-МКС, объединяемые в соединители соответствующих типов, из которых строятся коммутационные блоки КС с требуемыми структурными параметрами.
Коммутационные системы могут иметь разную проводность линий (2, 3, 4, 5, 6 и более), которая зависит от назначения АТС, типа используемого коммутационного прибора и способа отражения состояния объектов коммутационной системы (входов, выходов, промежуточных линий, точек коммутации). Коммутационные системы могут иметь электрический, магнитный или механический способ удержания соединения, который зависит от типа применяемого коммутационного прибора. Если в коммутационных системах применяются коммутационные приборы, не обладающие свойством памяти (например, герконовые реле), то в такой КС соединение удерживается электрическим путем. В тех КС, где используются приборы, обладающие свойством памяти (например, ферриды), удержание осуществляется, магнитным способом. В процессе установления и разъединения соединений необходимо иметь информацию о состоянии объектов КС, например, свободна или занята та или иная линия. Информация может храниться (записываться) либо на служебных проводах и контактах в коммутационной системе, либо в специальном оперативном запоминающем устройстве ОЗУ.
Под служебными проводами понимают дополнительные коммутируемые провода, по которым не осуществляется передача разговорных сигналов, а производится проба выходов, удержание — соединения или выполняются другие функции, в процессе установления соединения, удержания его и разъединения. При использовании оперативных запоминающих устройств проводность коммутационной системы определяется проводностью разговорного тракта (двух или четырех проводная КС). Квазиэлектронные АТС различаются между собой по способу : построения управляющих устройств. Управляющие устройства могут быть выполненными с непосредственными (иногда говорят «жесткими») связями между функциональными блоками ФБ или. Структура УУ с непосредственными функциональными связями зависит от алгоритма функционирования УУ в процессе установления соединений и реализуется в виде автоматического устройства, логика работы которого характеризуется его схемой. Очередность работы функциональных блоков УУ определяется постоянными (жесткими) связями между этими блоками и закладывается при монтаже УУ. Подобную структуру УУ имеют электромеханические системы АТС, поэтому последние являются аналогами КЭАТС с непосредственными связями между блоками. Основным недостатком УУ с непосредственными связями между ФБ является необходимость перемонтажа схем управляющих устройств в случае изменения алгоритма функционирования АТС.
Программные КЭАТС имеют управляющие устройства,- алгоритм функционирования которых определяется специальным программным устройством, в котором заложена программа работы по установлению соединения. Если программа работы обеспечивается за счет определенных (монтажных) соединений между функциональными блоками самого программного устройства, то такие КЭАТС называют АТС с замонтирвванной программой. Для изменение программы требуется изменение (перемонтаж) соединений внутри программного устройства. Если программа работы записывается в специальном запоминающем устройстве, то в этом случае УУ, по существу, представляет собой специализированную электронную управляющую машину (ЭУМ), которая может строиться с использованием элементной базы и методов синтеза электронных вычислительных машин (ЭВМ). Такие АТС называют КЭАТС с записанной программой.
Использование программного управления в КЭАТС обеспечивает практически выполнение всех требований, которые предъявляются к современной технике автоматической коммутации и, в частности, к автоматической телефонной связи. Эти требования следующие: возможность оперативного изменения алгоритмов функционирования управляющих устройств, вызываемого, например, необходимостью предоставления абонентам дополнительных видов обслуживания, присвоения им различных категорий обслуживания и приоритетов, введения в случае необходимости ограничений в отдельных видах связи; увеличения скорости выполнения процессов управления соединениями, что особенно важно для автоматизации междугородной и международной связи; возможность создания узлов и станций коммутации большой емкости (городские АТС емкостью несколько десятков тысяч номеров и АМТС емкостью несколько тысяч каналов), что необходимо в условиях быстрого увеличения телефонной плотности и широкой автоматизации междугородной связи; введение программ контроля и диагностики работы оборудования АТС, что существенно облегчает процесс технического обслуживания АТС и повышает производительность труда обслуживающего технического персонала;
возможность организации динамического управления сетями связи с целью оперативного управления потоками информации,
Выполнение перечисленных технических требований КЭАТС с программным управлением должны обеспечиваться при одновременном снижении капитальных затрат на изготовление, установку и монтаж оборудования за счет автоматизации процесса производства, применения прогрессивной технологии производства, а также за счет автоматизации монтажных работ и тренировки.
Квазиэлектронные АТС по сравнению с электромеханическими обеспечивают большие возможности при построении телефонных сетей, так как являются более гибкими системами. Кроме того, КЭАТС имеют меньшие габариты, поэтому требуют меньших площадей и кубатуры зданий, меньших затрат на электроэнергию и на эксплуатационное обслуживание.
Оборудование КЭАТС состоит из следующих основных частей (рис. 10.2): коммутационной системы, различного вида комплектов,
регистров и управляющего устройства. Коммутационная система КС предназначена для установления соединений между линиями (или каналами), включенными в ее входы и выходы. Комплекты, включенные в КС, предназначены для передачи и приема управляющих и линейных сигналов. Комплекты подразделяются на абонентские АК, связанные через абонентскую линию с телефонным аппаратом абонента; шнуровые ШК, служебные СК или вспомогательные ВК, регистры Рег или комплекты набора номера КНН, комплекты входящих ВКСЛ и исходящих ИКСЛ соединительных линий. Управляющее устройство КЭАТС состоит из центрального управляющего устройства ЦУУ и периферийных управляющих устройств ПУУ. Последние представляют собой промежуточное оборудование, обеспечивающее взаимную работу КС с включенными в нее комплектами и ЦУУ и предназначенное для согласования временных и электрических параметров сигналов, которыми обмениваются между собой КС и ЦУУ.
Центральное управляющее устройство представляет собой комплекс оборудования, в который входит программное устройство. Этот комплекс обеспечивает вместе с ПУУ управление установлением соединения на АТС в соответствии с заданной программой.
В многозвенных КС для образовании цепей удержания герко новых реле используются схемы параллельного и последователь. ного включения. При последовательном включении обмоток число звеньев ограничено допустимой величиной напряжения и током удержания. Параллельное включение обмоток удержания не имеет указанного недостатка, однако требует более дорогих реле

из-за необходимости иметь на каждом реле две обмотки. Тот или иной тип герконовых реле при построении МГС выбирается при разработке КЭАТС в соответствии с ее назначением.
При построении КС с электрическим удержанием имеет место значительный расход электроэнергии, поскольку при каждом соединении в рабочем состоянии находятся обмотки удержания реле на каждом на звеньев коммутации. С целью уменьшения расхода электроэнергии для образования условий удержания в КС используются герконовые реле с магнитной блокировкой, получившие название ферридов.
Из отдельных ферридов выполняется многократный ферридовый соединитель (МФС), который в каждой точке коммутации имеет феррид с соответствующим числом контактов. Схема коммутации разговорного тракта в МФС аналогична схеме коммутации в герконовом соединителе. Соединение обмоток в МФС, имеющем четыре входа и четыре выхода, приведена на рис. 10.6. Для МФС с указанными структурными параметрами требуется 16 ферридов, которые располагаются в четырех горизонтальных и четырех вертикальных рядах. В каждом горизонтальном ряду обмотки Х н в каждом вертикальном ряду обмотки У соединены последовательно. Обмотки всех горизонталей и обмотки всех вертикалей запараллелены н соединены друг с другом. Для управления работой ферридного соединителя используется общий импульсный генератор ИГ, который может быть подключен к любой горизонтали при помощи реле Г1 — Г4 и к й вертикали посредством реле В1 — В4. Если в МФС треб установить соединение, например, входа выходом Д 4 необходимо обеспечить включение обмоток феррида ФЯ расположенного на пересечении первой горизонтали и четвертой вертикали. Для этого необходимо одновременно включить реле Гф и Bg, которые замкнут свои контакты, и импульс тока от генератора ИГ синхронно и синфазно пройдет через обмотки Х и У феррида , который нет свои контакты. При этом в ферридах 4ф1, горизонтального ряда ток пройдет только по обмоткам У, а в ферридах вертикального ряда — только по обмоткам-л. Поэтому в последовательной цепи из восьми ферридов сработает, только один, у которого ток прошел по обеим обмоткам в данном случае это будет феррид.
После прекращения управляющего импульса и размыкания цепей реле Гд. и % феррид 4ф за счет остаточного намагничивания остается в рабочем состоянии без потребления тока, т. е. обеспечивается магнитное удержание установленного соединения.
Одной из особенностей ферридового соединителя является то, что если какие-либо из ферридов до момента включения находились в состоянии с переключенными контактами, то при прохождении импульса тока только через одну обмотку (Х или У безразлично) происходит перемагничивание сердечников, в результате чего контакты этих ферридов размыкаются. Это свойство ферридов устраняет опасность двойных соединений, поскольку
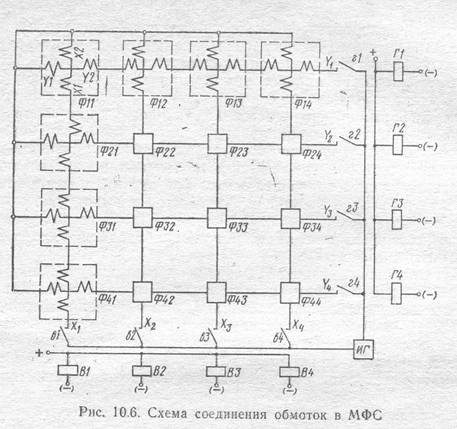
автоматически обеспечивается установление всегда только одного соединения по любому горизонтальному и вертикальному ряду,. и позволяет не иметь специальных сигналов отбоя, что существенно упрощает процесс управления коммутационной системой. Однако это свойство ферридового соединителя требует записи информации о состоянии. входов и выходов (или точек коммутации) в специальном запоминающем устройстве, поскольку после окончания соединения контакты феррида могут оставаться некоторое время (до установления нового соединения в соответствующем горизонтальном или вертикальном ряде соединителя) в рабочем положении, хотя вход и выход уже считаются свободными и могут заниматься для нового соединения. Следовательно, информация об освобождении входа и выхода должна быть передана в ЗУ.
Для управления работой феррида требуются импульсы тока большой мощности, поэтому амплитуда импульса достигает 10 А. Длительность управляющего импульса для включения феррида составляет 10 — 100 мкс и определяется только временем перемагничивания магнитной системы, так как после прекращения управляющего, импульса движение контактных пружин до момента замыкания происходит под действием остаточной магнитной индукции.
Разновидностью многократного соединителя с магнитным удержанием является многократный интегральная соединитель (МИС), который отличается от МФС тем, что магнит (из полутвердого магнитного материала) в выбираемой точке коммутации намагничивается по способу безгистерезисного намагничивания [7].
Для этого в одну из управляющих обмоток подается прямоугольный импульс тока, а во вторую — серия знакопеременных затухающих импульсов тока. При сложении магнитных полей, создаваемых управляющими токами, магнит намагничивается по безгистерезисной кривой. Начальная: амплитуда переменного затухающего магнитного поля должна быть достаточной для насыщения магнита. Таким образом, магниты - соединителя, на которые одновременно воздействует постоянное магнитное поле и переменное затухающее магнитное поле, намагничиваются; магниты, на которые воздействует только поле Нр, сохраняют свое состояние а магниты, на которые воздействует только переменное затухающее магнитное поле, размагничиваются. На рис. 10.7a показаны основная кривая намагничивания 1 и безгистерезисная кривая 2. Величина магнитного поля Н, при котором начинается намагничивание по основной кривой намагничивания, значительно превышает величину магнитного поля Н, при котором заканчивается намагничивание по безгистерезисной кривой. Это позволяет иметь больший допуск при выборе величины поля Нр (рабочий номинал) между значениями Н1 и Н>. Размагничивание магнита производится только при воздействии серии знакопеременных затухающих импульсов тока. На рис..10.7б показан принцип
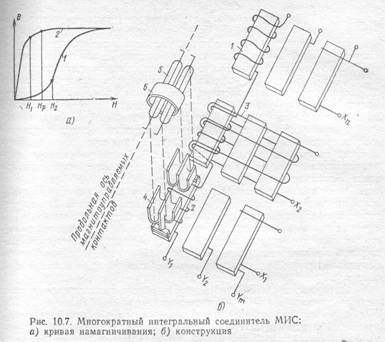
конструктивного выполнения МИС. В каждой точке коммутации установлены магниты 1, магнитопроводы 4, в которые помещаются герконы 5, управляющие обмотки 2 и 3. На герконы надето короткозамкнутое кольцо 6 из материала с высокой электропроводностью. Магнитопроводы из полутвердого магнитного материала охвачены обмотками управления Х и У. Управляющие обмотки 2 (обмотки У) соединяются последовательно в каждом ряду и выводятся на управляющие входы соответственно. Управляющие обмотки 3 (обмотки Х) наматываются общими для каждого ряда герконов и выводятся на управляющие входы Х соответственно Х1, Х ..., Х. Обмотки используются для управления переключением герконов в точке коммутации. После прекращения управляющих сигналов герконы остаются в переключенном состоянии за счет остаточного намагничивания магнита.
Для размыкания герконов в точке коммутации на одну из управляющих обмоток подается серия знакопеременных затухающих импульсов, обеспечивающих размагничивание магнита. В конструкции интегрального соединителя имеются две платы с печатным монтажом — плата магнитной системы с обмотками и плата герконов. При сборке МИС обе платы крепятся вместе так, чтобы герконы входили в магнитопроводы платы магнитной системы.
При объединении коммутационных элементов (герконов) в соединитель наблюдаются взаимные влияния между ними, что существенно снижает коэффициенты запаса по магнитодвижущей силе МДС и токам управления. Величина этого влияния зависит от расстояния между герконами соседних точек коммутации. Наибольшее влияние имеет место в направлении, перпендикулярном продольным осям магнитов и герконов вследствие того, что магнитная проводимость воздушных промежутков в этом направлении намного больше, чем других. Поэтому знакопеременные затухающие импульсы подаются и обмотки Х, расположенные в направлении наибольшего влияния между коммутационными элементами. Благодаря этому удается резко уменьшить эффект взаимного магнитного влияния. Для устранения возможности кратко- временного срабатывания герконов во время действия только переменного затухающего магнитного поля в конструкции МИС предусмотрено короткозамкнутое кольцо 6. Эффективность защиты зависит от сопротивления кольца, т. е. электропроводности материала и поперечного сечения. Г1ри выбранных размерах кольца допустима длительность управляющих импульсов, подаваемых в обмотку л до 200 мкс.
Многократные интегральные соединители выпускаются в двух модификациях: МИС-10 — четырехпроводной емкостью 4Х4 и МИС-11 — двухпроводной емкостью 4Х8. Габариты соединителя 215X182X18 мм, масса — 900 г. Соединитель типа МИС пред. назначен для коммутации цепей, по которым может передаваться как аналоговая, так и дискретная информация.
Разновидностью многократного герконового соединителя с магнитным удержанием является соединитель, в котором в точке коммутации установлен гезакои. Гезакон — это герметизированный запоминающий контакт (в американской литературе такие контакты называют ремридами, а в японской — меморидами). В гезаконе роль переменных магнитов выполняют сами контактные пружины, которые изготовляются из магнитного сплава с коэрцитивной силой 20 — 30 Э 143]. В процессе работы гезаконов направление намагниченности их пружин может меняться под действием кратковременных магнитных полей, возбуждаемых управляющими импульсами тока в обмотках. Под воздействием импульсов тока одного направления обе пружины оказываются на магниченными в одном и том же направлении, а при импульсе другого направления они на магничиваются в противоположных направлениях. В первом случае контактные пружины окажутся замкнутыми, а во втором — разомкнутыми. Оба состояния гезкона устойчивы, так как в замкнутом и в разомкнутых состояниях гезакои может находиться сколь угодно длительное время, поскольку его контактные пружины намагничены в том или ином направлении. Точка коммутации, выполненная на гезаконах, имеет ряд преимуществ по сравнению с точкой коммутация на ферридах: меньшие размеры, меньшее число деталей, лучшую технологичность, в несколько раз меньшие токи управления и импульсные помехи.
10.4. ПОСТРОЕНИЕ КОММУТАЦИОННОЙ СИСТЕМЫ КВАЗИЭЛЕКТРОННЫХ АТС
Коммутационная система КЭАТС строится по использованием типа. На основе соединители более крупные коммутационные блоки с требуемыми структурными параметрами для построения коммутационной системы АТС. Параметры соединителей на различных звеньях КС могут быть неодтпгаковыми. Наиболее распространенными являются емкостью 2Х2, 2X4, 4Х4, 4Х8, 8Х8, несколько режё используются соединители BXI6 и 16K N. При разработке структуры коммутационной системы АТС учитываются: емкость и назначение АТС, тип используемого соединителя, пропускаемая нагрузка, величина потерь сообщения, способ построения электронных управляющих устройств, алгоритм управления установлением соединения.
Для построения КС в квазиэлектронной АТС используются коммутационные блоки двух разновидностей блоки смешивания и блок концентрации.
Блок смешивания имеет одинаковое число входов и выходов и предназначен для смешивания нагрузки. На рис. 10.8а приведена
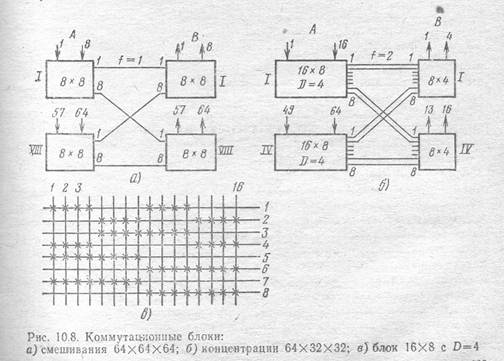
схема двухзвенного блока смешивания с параметрами 64Х64Х64, построенного на соединителях 8Х8. Блок смешивания имеет следующие структурные параметры: общее число входов N=64, число промежуточных линий V — 64, общее число выходов М =64, коэффициент связности между коммутаторами звеньев. А и В f=1 и коэффициент концентрации N = l. Число входов в каждый коммутатор звена А п=8, число выходов из каждого коммутатора звена А т —— 8, число коммутаторов на звене А 1=8. Число входов в коммутатор звена Bn — 8, число выходов m> — 8, и число коммутаторов k> — 8.
На рис. 10.8б представлена схема двухзвенного блока концентрации, предназначенного для перехода от 64 входов к 16 выходам, что обеспечивает концентрацию нагрузки на выходах блока (4:1). В этой схеме на звене А используются четыре однозвенных неполнодоступных блока 16Х8 с доступностью 4 (рис. 10.8в). На звене В имеется четыре соединителя 8Х4. Параметры блока концентрации, приведенного на рис. 10.8б, следующие: У=64, в=32, М=16, f=2 и о=М/N=0,25. Приведенный блок концентрации рассчитан на пропускание удельной нагрузки 0,1 Эрл. Для большей удельной нагрузки используются двухзвенные блоки с меньшей концентрацией (Л=32, Vg=16, М=16, о=0,5).
Блоки смешивания и концентрации могут иметь другие структурные параметры и быть построены с использованием соединителей большей или меньшей емкости.
В коммутационных системах АТС большой емкости городского типа применяются два типа коммутационных блоков, построенных из блоков концентрации и смешивания: блок абонентских линий БАЛ и блок соединительных линий БСЛ. Четырехзвенный блок абонентских линий (рис. 10.9) имеет следующие структурные
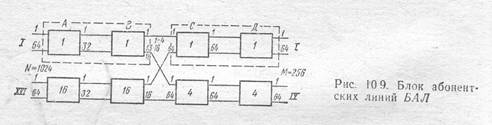
параметры: N =1024, Р=512, Рвс= V<p— 256, М=256, o=M/N=0,25. При этом на звеньях А и В используются 16 блоков концентрации вида, приведенного на рис. 10.8б: На звеньях С и В используются четыре блока смешивания 64Х64Х64 (см. рис. 10.8a) .
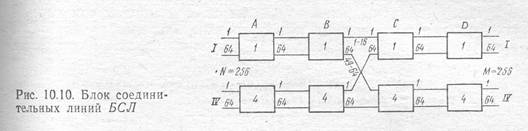
Блок соединительных линий (рис. 10.10) также имеет четырехзвенную структуру 256Х256Х256Х256Х256 и построен на основе блоков смешивания 64Х64Х64 (см. рис. 10.8а). Число блоков БАЛ и БСЛ зависит от емкости АТС. Блочное построение коммутационной системы позволяет наращивать емкостями путем добавления последних по мере развития емкости АТС. Для учрежденческих и сельских АТС, имеющих, как правило, небольшие емкости, используются двухзвенные блоки БАЛ и
БСЛ. Так, для АТС емкостью 2048 могут. использоваться двухзвенные блоки БАЛ типа 256Х128Х64 (рис. 10.lla) и блоки БСЛ
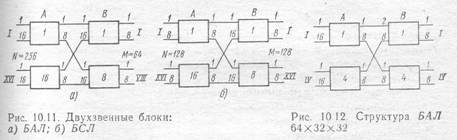
типа 128Х128Х128 (рис. 10.11б). С помощью таких блоковаможно обеспечить следующие градации емкости АТС: 512, 1024, 20М.
Для АТС малой емкости от 64 до 256 номеров могут использоваться двухзвенные блоки БАЛ типа 64X32X32 (рис. 10.12) и двухзвенные блоки БСЛ типа 64Х64Х64 (см. рис. 10.8а). Число этих блоков определяется емкостью АТС.
Таким образом, коммутационная система квазиэлектронной АТС комплектуется из требуемого числа коммутационных блоков ф БАЛ и БСЛ, которые соединяются между собой через промежуточные щиты, На рис. 10.13 для примера представлена одна из возможных .структурных схем коммутационной системы КЭАТС. В блоки БАЛ с одной стороны включаются абонентские комплекты АК, а с другой — шнуровые комплекты ШК и промежуточные линии (ПЛ) к блокам БСЛ. Блок абонентских линий обеспечивает концентрацию и.смешивание нагрузки, поступающей от абонентов АТС. Шнуровые комплекты включаются на промщите ПШ таким образом, что часть ШК обслуживает соединения, устанавливаемые между абонентскими линиями одного и того же блока,
а часть ШК обслуживает межблочные соединения. Блок соединительных линий является блоком смешивания. В блоки БСЛ включаются линейные комплекты исходящих ИКСЛ и входящих ВКСЛ соединительных линий, а также служебные комплекты и регистры (или комплекты приема импульсов набора номера вызываемого абонента). Блоки БАЛ и БСЛ соединяются между собой на ПЩ таким образом, что каждый блок БАЛ соединяется с каждым блоком БСЛ.
Для осуществления транзитных соединений между блоками БСЛ предусмотрены межблочные линии, с помощью которых устанавливаются соединения между соединительными линиями СЛ, включенными в разные блоки. Кроме того, предусматриваются

пучки внутриблочных линий для транзитных соединений через один какой-либо блок БСЛ. Для исходящих и входящих соединений в выходы блоков. БСЛ включаются комплекты ИКСЛ н ВКСЛ, из которых получают питание микрофоны ТА вызывающего и вызываемого абонентов данной АТС.
В зависимости от структуры блоков БАЛ и БСЛ и способов включения комплектов соединение через коммутационную систему устанавливается через разное число звеньев. Так, для структуры блоков БАЛ и БСЛ в соответствии с рис. 10.9 и 10.10 соединения устанавливаются через восемь звеньев, а для структуры БАЛ и БСЛ в соответствии с рис. 10.1 l a и б — через четыре звена.
10.5. ПОСТРОЕНИЕ КОММУТАЦИОННОЙ СИСТЕМЫ ЭЛЕКТРОННЫХ АТС
Для построения коммутационной системы и управляющих устройств электронных коммутационных узлов могут быть использованы бесконтактные элементы с двумя устойчивыми состояниями. Принципы действия таких элементов основаны на различных физических явлении, в вакууме, в полупроводниках, в газах, в ферромагнитах и т. д. Во всех этих случаях используется нелинейная зависимость между физическими величинами, дающая возможность создать скачкообразный переход элемента из одного состояния в другое. Одно состояние является проводящим (открытым), а второе — непроводящим (закрытым), причем время перехода из одного состояния в другое весьма мало.
В качестве элементов для образования двух состояний электрической цепи могут использоваться (рис. 10.14): электронные

лампы, лампы с холодным катодом — диоды и триоды (тиратроны), транзисторы, полупроводниковые диоды, магнитные элементы (ферриты), оптроны и др. Все эти элементы позволяют производить замыкание и размыкание электрической цепи нагрузки R, немеханическим путем и выполняют ту же задачу, что и релейные контакты (рис. 10.14а). Управление элементами осуществляется подачей соответствующего напряжения или тока на управляющий вход У (в скобках показан потенциал рабочего состояния, а без скобок — исходного состоянии). Принцип действия элементов изучается в курсах «Микроэлектроника», «Основы дискретной автоматики». Приведенные на рис. 10.14 элементы не обладают в полной мере свойствами релейного контакта, который имеет практически бесконечное сопротивление в разомкнутом состоянии и малое (почти нулевое) сопротивление в замкнутою состоянии. В электронных, ионных и магнитных элементах сопротивление в закрытом состоянии велико, однако небесконечно, а в открытом состоянии мало, но не равно нулю. Эти элементы могут быть представ. лены эквивалентной схемой на рис. 10.14и. Отношение сопротивлений в закрытом и открытом И, состояниях представляет собой коммутационный коэффициент или коэффициент перепада по сопротивлению сопротивление элемента соответственно в открытом и закрытом состояниях. Чем больше коммутационный коэффициент, тем выше качество контакта. Иногда под коммутационным коэффициентом понимают отношение напряжения или тока на выходе элемента в закрытом и открытом состояниях.
Электронные элементы по сравнению с электромеханическими обладают значительно большими скоростями переключения, не требуют искрогашение при переключении из одного состояния в другое, имеют большой срок службы, во многих случаях обладают меньшими габаритами и меньшим потреблением электроэнергии. Однако по величине коммутационного коэффициента и коммутационным возможностям (количество одновременно управляемых цепей) они уступают электромеханическим элементам.
По аналогии с четырехполюсниками все бесконтактные элементы можно разделить на пассивные, не имеющие дополнительных источников тока (например, электронные, ионные и полупроводниковые диоды), и активные, в которых выходной ток создается дополнительным источником тока, не связанным с управляющим напряжением или током (например, электронные и ионные триоды, транзисторы, оптроны). По своему действию бесконтактные элементы можно разбить на две группы: элементы, обладающие и не обладающие свойством памяти. В обоих случаях элемент изменяет свое состояние под влиянием внешнего управляющего сигнала, но в первом случае он сохраняет это состояние до нового появления управляющего сигнала, а во втором — только на время; пока имеется управляющий сигнал. В релейных схемах элементом, обладающим свойством памяти, является реле с блокировкой. К электронным элементам, обладающим свойством памяти, относятся тиратроны и магнитные элементы с прямо угольной петлей гистерезиса (ферриты). Для построения коммутационных систем ЭАТС в настоящее время нашли наибольшее применение полупроводниковые диоды и транзисторы.
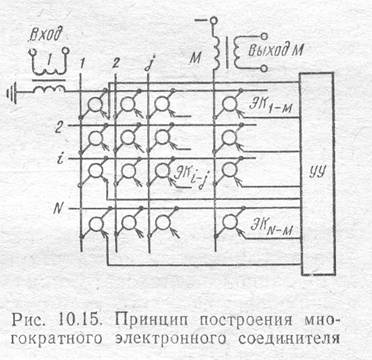
Из отдельных электронных элементов создаются соединители с требуемыми структурными параметрами. Электронный элемент, включенный по определенной схеме, выполняет роль, аналогичную механическому контакту искателей, соединителей или реле в АТС электромеханического или квазиэлектронного типа. Поэтому такую схему называют электронным контактом ЭК. На рис. 10.15 представлена схема многократного электронного соединителя МЭС. В каждой точке коммутации устанавливается электронный контакт, например тиратронный, диодный или транзисторный, обеспечивающий соединение входа с выходом под действием сигнала, поступающего на вход из управляющего устройства. Каждая горизонталь и вертикаль соединителя связаны с определенным входом и выходом через трансформаторы, поэтому в некоторых электронных АТС в пределах станции коммутация разговорного тракта может осуществляться но однопроводной системе.
В большинстве электронных соединителей существует гальваническая связь между исполнительными и управляющими цепями, что требует специальных мер для уменьшения влияния цепей управления на разговорный тракт. Для построения коммутационной системы электронных АТС с пространственным разделением каналов используются те же принципы, что и при построении КС электромеханических и квазиэлектронных АТС. Из отдельных МЭС создаются коммутационные блоки с требуемыми структурными параметрами, аналогичные блокам КЭАТС. При большой емкости необходимо использовать,
как правило, многозвенные коммутационные системы, поэтому соединительный путь между входом и выходом проходит через несколько электронных контактов, что накладывает определенные ограничения на число звеньев коммутационной системы, а следовательно, и на емкость АТС.
Предельная емкость электронной АТС зависит от качества электронного контакта. Чем выше качество ЭК, тем большую емкость могут иметь ЭАТС. Однако повышение качества ЭК, как правило, сопровождается усложнением его схемы и использованием более дорогих электронных элементов и других компонентов, что приводит к значительным капитальным затратам и делает ЭАТС более дорогими/по сравнению с АТС электромеханического или квазиэлектронного типа.
В настоящее время еще не удается создать высококачественный и экономичный электронный контакт для разговорного тракта АТС, поэтому разработанные АТС с пространственным разделением каналов имеют небольшие емкости. Одним из способов снижения требований к ЭК для коммутации разговорного тракта является использование импульсного преобразования разговорных сигналов для построения ЭАТС с импульсно-временным разделением каналов.
10.6. РАЗГОВОРНЫЙ ТРАКТ МАТС С ИМПУЛЬСНО- ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ
Принцип построения разговорного тракта с импульсно-временным разделением каналов представлен на рис. 10.16. Каждая абонентская линия имеет электронный контакт ЭК, через который она может подключаться к общестанционному участку тракта О. Для

Выдача требуемых импульсных последовательностей обеспечивается через управляющую (вспомогательную) пространственную коммутационную систему
УПКС (рис. 10.17) 11 соединения телефонных аппаратов двух абонентов Аб1 и А62 не. обходимо одновременно с соответствующей периодичностью, на. пример р; (см. рис. 3.15б), замыкать ЭК этих абонентов линий. При каждом импульсе ЭК открывается, а в паузах между импульсами данной последовательности закрывается. При новом соединении последовательность импульсов может быть другой, например р; или рв. Для передаваемой полосы разговорных частот 300— 3400 Гц частота замыкания контактов должна быть не ниже 6800 Гц. В известных экспериментальных ЭАТС частота замыкания контактов составляет 8, 10, 12, 5 кГц. Такую частоту переключения могут обеспечить только быстродействующие ЭК, поэтому данный способ разделения каналов не может использоваться в электромеханические.

Требуемые ЭК в УПКС выбираются управляющим устройством УУ в соответствии с номерами линий вызывающего и вызываемого абонентов и номером канала, предоставляемого для соединения. Поскольку ЗК в разговорном тракте открывается на очень малые промежутки времени, разговорный ток, приходящий по абонентской линии, передается в обще станционный участок тракта (провод) О в виде последовательности импульсов, модулированных в 9К1 по амплитуде. Для осуществления разговора эту последовательность нужно подать на ЭК2 и демодулировать ее, т. е. выделить низкочастотную составляющую разговорных токов, поступающих на вход ЭК1. Эту составляющую можно выделить при помощи фильтра нижних частот ФНЧ, который обычно имеет частоту среза, равную половине частоты повторения импульсов. С введением ФНЧ схема разговорного тракта с импульсно-временным разделением каналов - принимает вид, показанный на рис, 10.18. Если на вход ЭК1 поступает

разговорный ток, изменяющийся по закону Ат cos М (где А — амплитуда импульсов, т — коэффициент модуляции), выходе ФНЧ2 появляются разговорные токи, меняющиеся по : тому же закону, но с меньшей амплитудой, а именно: Атусов М
(т1=тТ— коэффициент заполнения, т — длительность импульса, Т, — период) .
Разговорные токи низкой частоты передаются через станционный участок тракта в виде импульсов, поэтому система импульс но-временной передачи вносит затухание. Для оценки величины этого затухания предположим, что четырехполюсники, из которых : построен тракт, всюду согласованы и содержат элементы, не вносящие потерь, а сопротивление-нагрузки (одной из абонентских линий) равно сопротивлению генератора (другой абонентской линии).
Рабочее затухание в идеальной системе с импульсно-временным разделением каналов зависит как от числа каналов и, так и от коэффициентов а. Расчеты и экспериментальная проверка показывает, что затухание разговорного, тракта даже при небольшом числе импульсно-временных каналов в станционном участке тракта значительно превышает норму, установленную для рабочего затухания АТС. Это приводит к необходимости введения дополнительных устройств для компенсации затухания, вносимого АТС с импульсно-временным разделением каналов. Такими устройства ми являются усилители, которые могут включаться либо в станционный участок тракта (импульсные усилители ИУ), либо устанавливаться для каждой абонентской линии в тракт низкой часто. ты (усилители низкой частоты УНЧ).
При использовании на АТС четырехпроводной системы передачи (рис. 10.19) в станционном участке тракта устанавливается импульсный усилитель. Каждый абонентский комплект в этом. случае содержит дифференциальную систему ДС с балансным

контуром БК для включения двухпроводной абонентской линии, два электронных контакта ЭК и ЭК и, фильтр нижних частот ФНЧ. Для осуществления передачи от Аб1 к АбУ необходимо совпадение импульсных последовательностей поступающих. Для передачи в обратном направлении необходимо также совпадение последовательностей импульсов, приложенных.
Если усилители устанавливаются на каждую абонентскую линию (рис. 10.20), то в станционном участке тракта импульсы передаются с небольшой амплитудой, а требуемый уровень передачи на выходе к абонентской линии получают при помощи усилителя низкой частоты УНЧ.
Рассмотренные схемы разговорных трактов ЭАТС с импульсно-временным разделением разговорных каналов требуют достаточно сложных абонентских комплектов (АК) с дифференциальными системами, которые вносят дополнительное затухание. Если используется двухпроводная система передачи, АК могут быть упрощены (рис. 10.21). В обще станционный участок тракта включают

один импульсный усилитель и четыре электронных контакта ЭКа — ЭКв. Время занятия тракта делится на две части: время, предоставляемое для передачи от Аб1 к А62 (.9Кз и ЭК открыты, а ЭК и ЭКв закрыты), и время, необходимое для передачи в обратном направлении (ЭК4 и 3К> открыты, а ЭКз и ЭКв закрыты). Как мы видим, упрощение АК приводит к усложнению обще станционной части тракта, а также к сокращению длительности импульса минимум в 2 раза, что вызывает увеличение затухания разговорного тракта.
В разговорном тракте АТС с импульсно-временным разделением каналов используются электронные контакты 91(, фильтры ФНЧ, усилители ИУс или УНЧ и разрядные устройства РУ.
Электронный контакт периодически размыкает и замыкает разговорную цепь во время передачи разговорных токов между соединенными телефонными аппаратами, поэтому он должен обладать малым сопротивлением в открытом состоянии и большим со- противлением в закрытом. В отличие от ЭК, в системах с пространственным разделением каналов к нему предъявляются повышенные требования в отношении частоты переключения. Поэтому для построения схемы ЭК используются полупроводниковые диоды, транзисторы и другие элементы, обладающие высокой скоростью переключения.
На рис. 10.22 представлен ЭК на трех транзисторах, который работает следующим образом. При отсутствии управляющей серии транзисторы Т1 и Т2 закрыты напряжением +12 В, а транзистор ТЗ закрыт положительным потенциалом (или отсутствием) на управляющем выходе У. При подаче на управляющий вход импульсной последовательности р; при каждом импульсе транзистор ТЗ открывается, и в первичной обмотке трансформатора протекает ток. Появляющееся при этом напряжение на вторичной обмотке трансформатора обеспечивает открывание транзисторов Т1 и Т2 при каждом импульсе.

Благодаря этому образуется электрическая цепь через транзисторы Tl и Т2 для
прохождения разговорных сигналов. — Величина управляющего тока выбирается такой, чтобы удержать транзисторы Tl и Т2 в состоянии насыщения на время действия импульса, поступающего на управляющий вход У.
В качестве коммутационных транзисторов Т1 и Т2 должны использоваться транзисторы, обладающие достаточно высоким быстродействием и малым сопротивлением между коллектором и эмиттером в открытом (насыщенном) состоянии.
Используемые в схемах ЭАТС с импульсным разделением каналов фильтры, усилители импульсные и низких частот не отличаются от аналогичных устройств, применяемых в аппаратуре уплотнения,
Разрядное устройство предназначено для устранения переходного влияния между каналами. В ЭАТС с импульсно-временным разделением каналов переходное затухание между каналами зависит от взаимного расположения импульсов соседних каналов. Максимальный уровень переходного разговора наблюдается между каналами, образованными импульсами двух соседних последовательностей. Основной причиной переходного разговора является накопление заряда на распределенной емкости общестанционного участка тракта (провод О), Защитный интервал между каналами т, мал, а заряд на емкости не успевает рассеяться к моменту поступления следующего канального импульса, что вызывает появление переходного разговора в соседнем канале. Для устранения
этого явления между проводом 0 и землей включается разрядное устройство РУ (рис. 10.23), представляющее собой электронный 1 контакт, управляемый специальной импульсной последовательностью. Эта последовательность открывает контакт после каждого канального импульса на время, несколько меньшее времени защитного интервала между импульсами двух соседних каналов.

Наличие РУ резко укорачивает задний фронт импульса, тем самым уменьшая уровень переходных разговоров (рис. 10.24о).
10.7. ГРУППООБРАЗОВАНИЕ BATC С ИМПУЛЬСНО- ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ
В ЭАТС с импульсно-временным разделением каналов импульсные последовательности могут закрепляться за отдельными источниками нагрузки (абонентскими или соединительными линиями) или предоставляться источникам только на время соединения. По принципу- построения разговорного тракта ЭАТС с импульсно-временным разделением каналов подразделяются на ЭАТС в которых соединение импульсно-временных каналов осуществляется с переходом на низкую частоту, и МАТС, в которых происходит непосредственная коммутация обще станционных трактов. На рис. 10.25 представлена схема ЭАТС с импульсно-временным разделением соединительных путей с амплитудно-импульсной модуляцией и четырехпроводным трактом. К обще станционным

проводам Оа и Оз, 04 подключаются через оконечные устройства (дифференциальную систему, усилитель, фильтр низкой частоты) и электронные контакты абонентские и внутристанционные линии. Число последних определяется по величине телефонной нагрузки, создаваемой N линиями и принятыми потерями сообщения. За каждой абонентской линией закреплена индивидуальная. серия импульсов р, р, ра, ..., р, которая воздействует на соответствующие ЭК; и ЭК'; и открывает их в определенной временной позиции.
Для установления соединения, например, между линиями Аб 1 и Аб N необходимо на концы внутристанционной линии, по которой будет устанавливаться соединение, подать серии импульсов соответственно. При этом ЭК концов этих линий будут открываться в той же временной позиции, что и ЭК соединяемых абонентских линий. Необходимое число импульсных каналов и определяется числом источников нагрузки N. При заданной частоте импульсных последовательностей образующих каналы, время, отведенное для одного канала, определяется из соотношения
Из полученного выражения видно, что с увеличением числа источников нагрузки уменьшается время, отводимое одному каналу, а это, в свою очередь, приводит к уменьшению длительности канального импульса, а следовательно, к увеличению рабочего затухания. [см. (10.2)]. Такой способ закрепления импульсных последовательностей за абонентскими линиями может быть использован для МАТС малой емкости.
Импульсные последовательности можно закреплять не за каждой абонентской линией, а за внутристанционными линиями. В этом случае при установлении соединения, например, между линиями Аб 1 и Аб N необходимо открывать ЭК и ЭК во временных позициях, закрепленных за концами внутристанционных линии. При этом Число Импульсных последовательностей сокращается и равно удвоенному количеству внутристанционных линий.
Разговор между абонентами Аб 1 и Аб N происходит следующим образом, Аналоговый сигнал поступает на ЭК, который открывается импульсами с последовательностью p. В ЭК аналоговый сигнал превращается в импульсный и проходит через ЭК открываемый в той же временной позиции. Импульсный сигнал проходит через ФНЧ и УНЧ, преобразуется в низкочастотный сигнал и поступает на ЭК и далее на ЭК. Эти электронные контакты открываются в одинаковой временной позиции pb, в результате чего на выходе ЭК появляется импульсный сигнал, который далее преобразуется в аналоговый и поступает в линию Аб Ф.
Коммутационная система ЭАТС позволяет осуществлять передачу разговора без перехода на низкую частоту, при этом импульсные последовательности каналов Ne закрепляются постоянно . за каждой абонентской или соединительной линией, а придаются каждой паре соединяемых линий только на время соединения. При таком построении схемы отпадает необходимость во внутри- станционных линиях, так как абонентские линии будут соединяться непосредственно через общестанционные провода 0> — О~ при воздействии на 9К этих линий, совпадающих по фазе серий им- пульсов,
Число каналов, предоставляемых для соединения группе из N абонентов, при любом способе закрепления каналов лимитируется длительностью канального интервала т. При частоте повторения импульсов f=8 кГц и числе каналов n=100 время, отводимое на канал, т=1,25 мкс. Дальнейшее увеличение числа каналов приведет к уменьшению т. При этом повышается требование к быстродействию ЭК и увеличивается рабочее затухание. Это ограничение накладывает определенные условия схемы группо- образования коммутационных систем МАТС.
В электронной МАТС большой емкости М абонентских линий разбиваются на й групп по а линий в группе. Каждой группе придается свой обще станционный провод 0 (групповой тракт) с числом временных каналов с. При установлении соединения между ;абонентскими линиями из разных групп имеет место коммутация между обще станционными проводами О, относящимися к соответствующим группам (рис. 10.26).
Соединение между абонентскими линиями внутри группы осуществляется одним из выше рассмотренных способов. Для соединении

АЛ разных групп необходима коммутация групповых трактов, которая может обеспечиваться как с переходом, так и без перехода на тональную частоту.
На рис. 10.26а представлена схема группообразования, в которой предусматривается переход на тональную частоту посредством комплектов тональной частоты КТЧ. Для установления соединения между каждой парой групповых трактов, обслуживающих разные группы, предусматривается отдельная группа комплектов КТЧ, общее число которых
Подключение КТЧ к двум групповым трактам осуществляется при помощи двух ЭК. Для коммутации групповых трактов и подключения к ним пиний в рассматриваемой схеме потребуется число ЭК, равное. В такой схеме при установлении соединения между абонентами разных групп не требуется совпадения импульсных последовательностей в различных групповых трактах. Для установления соединения между абонентскими линиями, относящимися к двум разным группам, например Аб 1 из Гр 1 и Аб и из Гр 2, необходимо подать одинаковые импульсные последовательности, например р на ЭК> в первой группе и ЭК z первого группового тракта, а на ЭК по второй группе и ЭК я второго группового тракта может быть подана любая другая свободная импульсная последовательность, например р;, образующая канал в групповом тракте.
Количество КТЧ можно сократить, используя схему группообразования, приведенную на рис. 10.266. В данной схеме за каждым групповым трактом (кроме одного) закрепляется одна группа КТЧ. Как и в схеме на рис. 10.26а, число комплектов КТЧ в группе равно числу каналов с. При этом любой канал из данной группы может через любой комплект КТЧ соединиться с любым импульсным каналом другой группы. Для обеспечения этого каждый комплект КТЧ имеет k групповых электронных контактов I'ЭК. Общее число электронных контактов в данной схеме равно Q>q=ck(k — 1)+nk, а количество комплектов КТЧ равно (k — lj, т. е. уменьшается в k раз по сравнению со схемой на рис. 10.26а Однако требования к ГЭК значительно возрастают, поскольку они должны работать при подаче любых импульсных последовательностей, образующих каналы в групповом тракте. В связи с этим ГЭК должны работать при значительно меньшей скважности между импульсами и, следовательно, их необходимо рассчитывать на рассеивание значительно большей мощности, чем обычные ЭК.
Для станций большой емкости необходимо применять звеньевое построение разговорного тракта, поэтому при использовании КТЧ станции становятся сложными и дорогими 1 к- и применение их становится нецелесообразным. Электронные АТС большой емкости можно строить по принципу непосредственной коммутации.

На рис. 10.27 представлена схема, в которой при установлении соединения между абонентскими линиями из разных групп ЭК этих линий и ГЭК соединяющие групповые тракты должны открываться в одной и той же временной последовательности. Такое соединение возможно только в том случае, если имеются импульсные каналы, одновременно свободные в обоих рассматриваемых группах. Количество ЭК в схеме
В том случае, если разговорный тракт строится по четырехпроводной системе, каждая группа имеет два импульсных групповых тракта передающий и приемный.
Недостатком схемы с непосредственной коммутацией групповых трактов являются сложность синхронизации, а также наличие внутренних блокировок за счет неудачного сочетания свободных каналов в различных группах. При установлении соединения в группах, обслуживаемых, например, трактами 0i и Ор, могут использоваться три способа выбора каналов.
1. Сначала в случайном порядке выбирается любой свободный ' канал в групповом тракте 0>, затем отыскивается свободный канал в той же временной последовательности в групповом тракте 0>. Если этот канал окажется занятым, абоненту посылается сиг. ': нал «Занято». Этот способ искания каналов достаточно прост, однако процесс обслуживания связан с большими потерями сообщения.
2. Находятся одноименные свободные каналы. в обоих групповых трактах, которые и используются для установления соединения. Если в групповых трактах нет одноименных свободных каналов, то абоненту посылается сигнал «Занято». При этом способе потери сообщения уменьшаются, однако процесс искания свободных каналов усложняется.
3. В групповом тракте 0 занимается любой свободный канал, во втором тракте отыскивается канал в той же временной позиции. Если этот канал окажется занятым, то для соединения используется ближайший свободный канал. С целью соединения этих каналов применяются линии задержки, которые обеспечивают сдвиг информации из временной последовательности одного канала во временную последовательность другого канала. При этом потери сообщения уменьшаются, однако схемы искания и коммутации усложняются.
ГЛАВА 12 ЭЛЕКТРОННЫЕ УПРАВЛЯЮЩИЕ УСТРОЙСТВА
12.1. СПОСОБЫ ПОСТРОЕНИЯ УПРАВЛЯЮЩИХ УСТРОИСТ
Установление соединения между входами и выходами коммутационной системы осуществляется управляющим устройством {одними или несколькими), которое должно обеспечивать принятый пора. док обслуживания соединений на данном коммутационном узла В зависимости от способа построения управляющие устройств могут выполнять все или только часть функций по установлению соединений. По выполняемым функциям различают три разновесности управляющих устройств: а) обеспечивающие все виды соединений в пределах одного {или нескольких) коммутационном блоков одной ступени искания; б) выполняющие только часть функций по установлению соединений или соединения одного да (такие управляющие устройства называют функциональнымн1; в) выполняющие все функции при установлении всех видов соединений в пределах всей коммутационной системы узла или станции {такие УУ называют централизованными).
Способ построения управляющих устройств оказывает влиянию на объем оборудования коммутационной системы. Из приведен. ных трех способов построения управляющих устройств первый требует наибольшего объема коммутационного оборудования, так как управляющее устройство каждой ступени искания устанавливает соединения между входом и выходом этой ступени, после чего освобождается, не дожидаясь окончания установления соединения через ace ступени искания. При этом может оказаться, что выход ступени искания, к которому установлено соединение, не имеет в последующих ступенях искания свободных и доступных ему промежуточных линий, тогда как другим выходам дан ной ступени доступны свободные промежуточные линии на после. дующих ступенях искания. Для снижения вероятности потерь по указанным причинам необходимо увеличивать число промежуточных линий и выходов на каждой ступени искания.
При втором способе построения управляющие устройства станций подразделяются на группы в зависимости от выполняемых ими функций при установлении различных видов соединений, В одних случаях каждая группа УУ обслуживает-различные связи: исходящую, входящую и внутреннюю. Внутри группы одновременно может устанавливаться только одно соединение, но в различных группах установление соединения может происходить параллельно. В других случаях каждая группа УУ обслуживает различные этапы соединений: например, соединение от вызывающей линии к свободному шнуровому комплекту и от шнурового комплекта к вызываемой линии и т п. Такой способ пост. роения управляющих устройств обеспечивает уменьшение объема коммутационного оборудования по сравнению со способом управления по ступеням искания. Минимальный объем коммутационного оборудования имеют коммутационные системы с централизованным управляющим устройством, которое управляет установлением соединений в пределах всей КС станции «от конца к концу» (от входа к выходу). В процессе установления соединения управляющее устройство взаимодействует с коммутационной системой, комплектами каналов (линий) и групповыми устройствами (регистрами или кодовыми приемниками и передатчиками), принимающими и передающими управляющую информацию, необходимую для установления требуемого соединения. Для выполнения своих функций УУ должно иметь соответствующее число функциональных блоков ФБ, : каждый из которых выполняет определенную задачу (операцию или группу операций) при установлении соединения через КС узла. Это означает, что при образовании соединительного пути через КС для разных видов соединений принимает участие разное количество ФБ управляющего устройства с разной очередностью их работы. Количество функциональных блоков УУ и их структура зависят от количества функций, возложенных на УУ в процессе установления соединений, которые в значительной степени определяются емкостью КС, схемой группообразования, способом искания, режимом работы тех или иных ступеней искания, количеством категорий абонентских и соединительных линий, требуемой величиной надежности. Очередность работы ФБ определяется принятым алгоритмом работы УУ по установлению соединений, а обеспечивается цятветствующими связями между ФБ. Существует два способа связи между ФБ, обеспечивающие определенную последовательность их работы: 1) ФБ имеют непосредственные (жесткие) функциональные связи между собой (см. рис. 4.8а); 2) ФБ взаимодействуют через программное устройство (см. рис. 4.8б). При непосредственной связи между ФБ число функциональных связей между блоками зависит от числа видов соединений, количества категории источников информации, числа возможных состояний объектов коммутационной системы и каналов связи и т. п. Для передачи и приема сигналов взаимодействия между блоками, определяющими очередность их работы при установлении соединений, в каждом ФБ должны быть предусмотрены специальные .. схемы. Если требуется изменить порядок обслуживания соединений (например, перевести источник информации из одной категории в другую), то необходимо изменить функциональные связи между отдельными блоками, что связано с изменением режимов работы тех элементов, которые обеспечивают передачу и прием г сигналов взаимодействия между блоками.
Программный способ построения УУ позволяет устранить функциональные связи между отдельными блоками. Это приводит к упрощению тех схем ФБ, которые принимают и выдают сигналы управления.
Схемы приема и выдачи сигналов взаимодействия между ФБ и ПУ могут быть одинаковыми для всех ФБ. При этом способе построения УУ в случае необходимости можно добавлять ФБ и менять очередность их работы без изменения схем уже существующих ФБ. Для этого достаточно изменить очередность выдачи управляющих сигналов из ПУ, что достигается изменением порядке выполнения программы. При введении новых видов обслуживания достаточно ввести в программу работы УУ дополнительные подпрограммы и обеспечить переход к ним в процессе установления соединения.
Программное управление позволяет предоставлять отдельные категориям абонентов различные условия обслуживания, напри- мер обслуживание вне очереди, для чего в случае необходимости освобождаются занятые соединительные пути или каналы; осуществлять следящий контроль за установленным соединением; восстанавливать нарушенное соединение без участия абонента; устанавливать соединения по двум и более параллельным путях для обеспечения заданной надежности; устанавливать соединения по обходным путям в случае, если основные пути заняты или повреждены. При программном управлении в случае необходимости можно изменять категории отдельных абонентов или вводить новые категории обслуживания путем добавления соответствующих ФБ в УУ, но при этом ранее существующие блоки не подвергаются изменениям, а программа работы по обслуживанию соединений обеспечивает новый порядок выдачи сигналов из ПУ в различные ФБ. Это позволяет гибко строить систему управления, не закладывая всех возможностей в начальной стадии введения КУ, а вводя их по мере необходимости путем добавления различных ФБ с одновременным увеличением числа команд для управления этими блоками.
Особенно большое значение приобретает программный способ управления в тех коммутационных узлах, где возможны переключения большого числа каналов в соответствии с состоянием сети для обеспечения связи в требуемых направлениях. Если на узле имеется, информация о состоянии сети, поступающая из устройств управления сетью, то по этой информации может обеспечить выбор оптимального пути прохождения: соединения между передатчиком и приемником информации. По информации о состоянии каналов в тех или иных направлениях ПУ может, в случае необходимости, направить соединение по обходным путям. Это позволяет осуществлять динамическое управление сетью связи.
Программный способ построения УУ позволяет контролировать работу оборудования путем создания контрольных («тестовых») программ. Во время выполнения контрольной программы авто. магически проверяется состояние оборудования, неисправные при. боры блокируются и включаются резервные. Имеется также возможность вводить проверочные испытания в основную программу, т. е. обеспечивать поэтапный контроль при установлении соединений, например, путем контроля длительности выполненных операций. Если операция не заканчивается в определенный отрезок времени, то ПУ производит повторное установление соединения, начиная с той операции, которая не завершилась. Если при повторной попытке завершить операцию не было достигнуто положительного результата, то ПУ включает резервный блок, который завершает установление соединения и одновременно передает сигнал в контрольное устройство о неисправности соответствующего блока.
12.2. ПРИНЦИПЫ ПОСТРОЕНИЯ ЦЕНТРАЛИЗОВАННЫХ ПРОГРАММНЫХ УПРАВЛЯЮЩИХ УСТРОЙСТВ
Централизованные программные управляющие устройства со стоят из двух основных видов оборудования: периферийного и центрального. Периферийное оборудование, образующее периферийные управляющие устройства ПУУ, включает в себя функциональные блоки, непосредственно связанные с объектами ком- мутационной системы узла и включенными в нее комплектами. Периферийные управляющие устройства передают. сигналы управления, а также информацию о координатах и состоянии объектов между центральным блоком и управляемыми объектами. Кроме того, ПУУ согласуют по частоте следования и мощности передаваемые сигналы между коммутационной системой, комплектами и центральным управляющим устройством ЦУУ. В состав ПУУ, как правило, входят определители объектов (входов выходов, промежуточных линий коммутационной системы, комплектов и регистров), блоки включения коммутационных элементов БВКЭ и подключающие устройства.
На станциях и узлах обычно имеется несколько групп ПУР, каждая из которых обслуживает определенную часть коммутационного оборудования, комплектов и т. п. Различия в структура ПУУ разных систем АТС зависят от распределения функций между отдельными ПУУ и центральным управляющим устройством, а также от алгоритма работы управляющего устройства. При проектировании ПУУ и ЦУУ и распределении функций между ними учитываются структура коммутационной системы, принцип работы коммутационных элементов, экономические показатели, технические возможности, конструктивное расположение оборудования. В зависимости от способа организации работы ПУУ можно разделить на активные, выполняющие большую часть своих функций без команд из ЦУУ, и пассивные, действующие только по командам из ЦУУ.
Основными блоками центрального управляющего устройства являются программное устройство ПУ, запоминающее устройство ЗУ, состоящее из оперативного ОЗУ и полупостоянного ППЗУ, и подключающие устройства, обеспечивающие взаимодействие между ЦУУ и ПУУ.
Блочное построение коммутационного оборудования и выделение в управляющем устройстве периферийных и центральных блоков позволяет при увеличении емкости АТС одновременно наращивать коммутационное и периферийное управляющее оборудование. В центральном управляющем устройстве соответственно увеличивается емкость запоминающих устройств и вносятся некоторые изменения в программу его работы.
При построении коммутационных узлов с централизованным программным управлением применяются два способа хранения информации о состоянии объектов коммутационной системы: с помощью служебных контактов коммутационной системы и посредством оперативного запоминающего устройства ОЗУ, входящего в состав ЦУУ. При использовании первого способа свободный соединительный путь выбирают определители промежуточных линий и выходов, которые получают информацию о состоянии объектов через служебные контакты коммутационной системы. В таких системах управляющее устройство для выполнения своих функций должно содержать следующие основные функциональные блоки (рис. 12.1): определитель абонентских линий ОАЛ,
работающий при исходящей и входящей связи; определитель про- межуточных линий ОПЛ; определитель входящих соединительных линий ОВСЛ; определитель выходов коммутационной системы (исходящих соединительных линий, абонентских регистров, шнуровых комплектов, вспомогательных комплектов) ОВ; блоки включения коммутационных элементов БВКЭ; программное устройство ПУ. Программное устройство представляет собой ЦУУ, а остальные функциональные блоки относятся к ПУУ. Такие управляющие устройства относятся к УУ с замонтирвванной программой.
При использовании второго способа хранения информации .о состоянии объектов с помощью ЗУ в управляющее устройство место определителя промежуточных линий ОПЛ и определите- I з выходов ОВ устанавливается оперативное запоминающее устройство ОЗУ. В программное устройство добавляется программа риска свободного соединительного пути. Основными функциональными блоками управляющего устройства (рис. l2.2) в этом случае будут: определитель абонентских линий ОАЛ, работающий только при исходящей связи; определитель отбоя комплектов ОК, который служит для приема сигналов отбоя из ИКСЛ КСЛ, ШК; определитель входящих соединительных линий ВСЛ; блоки включения коммутационных элементов БВКЭ; оперативное запоминающее устройство ОЗУ и программное устройство ПУ. Последние два функциональных блока входят в состав (УУ, остальные — в ПУУ. Этот вид управляющих устройств относится к УУ с записанной программой.
В оперативном запоминающем устройстве записывается два информации: информация о состоянии абонентских, промеуточных, исходящих линий, регистров, ВК и информация о состоянии соединительных путей. Запоминающее устройство, в .котором хранится информация первого вида, должно иметь один разряд на каждую линию, регистр и комплект. Запоминающее устройство, в котором хранится информация. второго вида, предусматривает одно многоразрядное слово на каждый выход из блока абонентских и блока соединительных линий. Последний вид памяти используется для временного хранения информации об установленных соединениях.
Если при использовании служебных контактов состоянии входа, выхода и промежуточных линий выбранного соединительного пути отмечается на этих служебных контактах, то при отсутствии последних УУ после установления соединения должно записать в запоминающее устройство состояние занятых объектов. Для этого е программе работы станции предусматриваются подпрограмма записи информации об установленном соединении и подпрограмма освобождения соединительных устройств, которая выполняется при поступлении сигналов отбоя по соединительным или абонентским линиям. Выбор свободного соединительного пути, запись информации об установленном соединении и отбое при помощи ЦУУ увеличивают время установления соединения и, следовательно, выдвигают повышенные требования к скорости работы управляющего устройства АТС.
В системах с централизованным управлением при использовании схемной памяти применяются два способа выбора соединительного пути между заданными входом и выходом КС. Первый, способ заключается в том, что опробование промежуточных линий и выбор соединительного пути осуществляется периферийными управляющими устройствами. Информация о результатах выбора поступает за тем в центральное управляющее устройство, которое в зависимости от результатов выбора осуществляет переход выполнению той или иной команды.
Второй способ выбора соединительного пути заключается в том, что опробование состояния линий осуществляется по команде из ЦУУ периферийными управляющими устройствами тех коммутационных блоков, через которые будет установлено соединение. Затем информация из периферийных устройств передается в ЦУУ, которое выбирает соединительный путь через КС.
При использовании первого способа периферийное УУ выбирает любой свободный соединительный путь между заданными входом и выходом, тогда как при применении второго способа существует возможность анализа информации о состоянии соединительных путей того или иного блока и выбора такого пути, занятие которого обеспечит наименьшее число блокировок для последующих соединений.
Особенностью АТС с централизованным программным управлением является возможность упрощения оконечных комплектов за счет передачи части их функций УУ и специальным вспомогательным упрощенным комплектам ВК (комплектам приема им. пульсов набора номера, комплектам сигнала контроля посылки вызова, комплектам посылки сигнала вызова и. т. п.). Однако в некоторых случаях упрощение оконечных комплектов приводит к необходимости неоднократного переустановления соединения при обслуживании одного вызова, что увеличивает время установления соединения.
Наличие одного, общего для всей станции центрального управляющего устройства обусловливает повышение требований к его надежности. Во всех известных квазиэлектронных системах АТС с централизованным управлением применяется дублирование ЦУУ. При этом используются два способа совместной работы двух ЦУУ:
параллельная работа двух ЦУУ, обрабатывающих одновременно одну и ту же информацию и сравнивающих результаты после выполнения каждой операции; поочередная работа двух ЦУУ. При параллельной работе каждое из ЦУУ выполняет одинаковые команды одинаковых для обоих ЦУУ программ. Операции обоих ЦУУ должны быть синхронизированы. Полученные после каждой операции результаты сравниваются между собой и используются для установления соединений и для непрерывной проверки исправной работы обоих ЦУУ.
При поочередной работе двух каждое ЦУУ обслуживает половицу поступающих вызовов. В случае повреждения одного ЦУУ другое обслуживает все соединения. Очередность работы ЦУУ такова, что если одно ЦУУ обслуживает соединение, другое ЦУУ в это время может принимать информацию о поступлении новых вызовов. Во время установления каждого соединения одним ЦУУ в другое передается информация о занятом входе, выходе и промежуточных линиях. Поэтому при выходе из строя одного ЦУУ другое может продолжить установление начатого другим ЦУУ соединения. Такой способ работы обеспечивает независимую работу ЦУУ.
Используется также такой способ совместной работы двух ЦУУ, при котором в установлении одного соединения могут принимать участие не только функциональные блока одного ЦУУ, но и функциональные блоки из разных ЦУУ (рис. 12.3). Переключение
функциональных блоков двух ЦУУ в нормальных условиях работы производится периодически через определенные интервалы времени. При появлении сигнала о повреждении устройство анализа повреждений выявляет неисправный блок путем их по- очередного переключения.
12.4. ЦЕНТРАЛЬНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО С ЗАПИСАННОЙ ПРОГРАММОЙ
Если коммутационная система узла (или станции) построена таким образом, что отсутствуют служебные провода и контакты, предназначенные для отметки состояния объектов КС, то в этом случае УУ должно иметь оперативное запоминающее устройство ОЗУ для хранения информации о состоянии объектов КС и комплектов, включенных в нее, а также для хранения информации об установленных соединениях.
Алгоритм работы управляющего устройства АТС при отображении . состояния коммутационной системы в запоминающем устройстве представляет собой последовательное выполнение арифметических и логических операций. Этот процесс подобен процессам, выполняемым электронными вычислительными маши- нами (ЭВМ). Поэтому появилась идея использования ЭВМ для управления процессами установления соединений на АТС. Однако( универсальные ЭВМ, в силу специфических условий работы АТС, нецелесообразно использовать в качестве управляющих устройств. Поэтому для коммутационных узлов и станций разрабатываются специальные электронные управляющие машины ЭУМ, в которым имеется возможность использования элементной базы, схемных в( технических решений вычислительной техники, а также применения отдельных блоков ЭВМ.
Коммутационная система АТС имеет большое количество источников информации, которыми являются абонентские и соедини- тельные линии, а ЭУМ имеют ограниченное количество входов, по которым они могут принимать информацию, и ограниченной количество выходов, по которым выдается информация о результатах выполнения той или иной задачи, поэтому управляющее устройство коммутационной системы не может состоять только из одной управляющей машины. Кроме того, скорости поступления сигналов от источников информации и скорости переключения коммутационных элементов значительно отличаются от скорости обработки информации в ЭУМ. Для согласования скорости работы элементов коммутационной системы и оконечных устройств со скоростью работы блоков ЭУМ, а также для включения коммутационных элементов управляющее устройство АТС должно содержать также периферийные управляющие устройства ППУ.

Структурная схема коммутационного узла с использованием ЭУМ в качестве центрального управляющего устройства приведена на рис. 12.8.
К периферийным управляющим устройствам относятся: определитель абонентских линий ОАЛ, определитель комплектов ОК определитель входящих соединительных линий ОВСЛ, блок включения коммутационных элементов БВКЭ и схема подключения СП, Центральное управляющее устройство, представляющее собой ЭУМ, состоит из следующих блоков: арифметического устройства АУ, программного устройства каналов (устройств) ввода-вывода информации КВВ и оперативного запоминающего устройства ОЗУ.
Электронная управляющая машина координирует работу всех периферийных блоков в процессе установления соединения и отбоя. Основными техническими характеристиками ЭУМ являются система команд, быстродействие, разрядность и емкость запоминающих устройств. К техническим характеристикам ЭУМ относятся также: адресность (число адресов в команде), основные временные параметры (цикл работы оперативного запоминающего устройства, время выполнения операций), скорость работы устройств ввода и вывода информации. Структура ЭУМ и ее функционирование более подробно изучаются в курсе «Электронные управляющие машины».
12.5. МНОГОПРОГРАММНЫЙ СПОСОБ УПРАВЛЕНИЯ УСТАНОВЛЕНИЕМ СОЕДИНЕНИЙ
При большой емкости коммутационной системы, значительных нагрузках, поступающих на ее вход, и последовательном (одно- программном) выполнении операций по установлению соединения требуются большая. скорость установления соединения, а следовательно, высокое быстродействие программного управляющего устройства и достаточно высокое быстродействие элементов ком мутационной системы. Быстродействие УУ ограничено, так как при управлении медленнодействующими функциональными блоками, до выполнения ими своих функций, программное устройство не может приступить к управлению следующим ФБ.
Устранить этот недостаток позволяет многопрограммное управление, при котором одновременно (параллельно) устанавливается несколько соединений 26, 20j. Различные соединения могут устанавливаться как по одной, так и по разным программам в зависимости от категории обслуживаемых вызовов. Длительность отдельных этапов установления соединений неодинакова. Например, этап приема регистром информации а номере вызываемого абонента значительно длиннее этапов установления соединения на отдельных ступенях искания. Поэтому в течение длительных этапов, реализуемых отдельными ФБ, программное устройство может управлять ФБ, обеспечивающими выполнение отдельных этапов других соединений, а по истечении некоторого времени или но определенно
й команде из ПУ вернуться снова к управлению следующим этапом первого соединения.
Такой способ установления соединения позволяет значительно повысить использование управляющих устройств, а следовательно, и уменьшить время ожидания начала обслуживания поступающих вызовов. При этом вся последовательность из N операций по установлению каждого соединения разбивается на l этапов (частей), каждый из которых содержит определенное число операций 24. Установление соединения происходит по этапам, причем для выполнения соответствующего этапа ПУ подключается к ФБ, устанавливающему данный этап соединения. В промежутках между указанными подключениями ПУ управляет установлением других соединений также путем поэтапного подключения к ФБ. Сигналом для перехода от управления одним соединением к управлению другим соединением служит или сигнал о выполнении определенного числа операций, или сигнал об окончании определенного отрезка времени, отводимого на эти операции.
Последовательности операций каждого соединения можно выполнять неравными частями. В этом случае сигналом перехода к управлению другим соединением должен служить сигнал (признак), появляющийся в процессе выполнения данной последовательности, например требование на установление приоритетного соединения.
На рис. 12.9 приведена диаграмма работы ПУ для последовательного (однопрограммного) и параллельного (многопрограммного) способов выполнения операций при одновременном обслуживании нескольких соединений.
При установлении каждого из т со- единений (b>, b>, ..., b;, ..., b) выполняется N операций (А, A,..., А) с временем обслуживания каждого соединения t.. При последовательном обслуживании время установления т соединений равно т1,.
При много программном способе обслуживания т соединений каждая последовательность операций N разбивается на I этапов.
Каждый этап соединения содержит операций. Обозначим время, которое затрачивает ПУ на управление k-м этапом соединения при многопрограммном способе, через 4ь время между началом выполнения двух соседних k и (k+ 1) этапов одного соединения — через 1,». Используя эти параметры, можно определить время установления соединений, общее число одновременно устанавливаемых соединений и, следовательно, степень использования программного устройства.
При однопрограммном способе управления соединением 1=4=1так как 1=1 и т=1. Из (12.10) следует, что для увеличения пропускной способности надо стремиться к уменьшению 4 и увеличению 4. Время t, в устройствах управления определяется максимально возможным временем задержки установления данного соединения, которое не вызывает снижения качественных показателей обслуживания или искажения принимаемой и передаваемой информации. Время t, зависит от вида источника информации и этапа установления-соединения. Поэтому его увеличение ограничивается внешними условиями работы устройства и зависит от вида источника информации и этапа установления соединения. Время в основном зависит от принятого способа управления соединения и быстродействия элементов, используемых в управляющем устройстве.
При многопрограммном управлении для получения более высокого использования ЛУ по сравнению с однопрограммным способом управления необходимо разбивать последовательность операций таким образом, чтобы операции управления медленнодействующими ФБ, с которыми, возможна параллельная работа других ФВ, располагались в конце этапов соответствующего соединения.
ГЛАВА 13 ФУНКЦИОНАЛЬНЫЕ БЛОКИ ПЕРИФЕРИЙНЫХ УПРАВЛЯЮЩИХ УСТРОЙСТВ
В процессе установления соединения между входом и выходом коммутационной системы управляющее устройство выполняет целый ряд операций, приводящих к образованию тракта передачи информации или к посылке соответствующего сигнала в случае невозможности установления соединения. Анализ процессов обслуживания соединений с помощью логических схем алгоритмов позволяет определить количество и назначение функциональных блоков ФБ управляющего устройства и очередность их работы.
Основными блоками управляющего устройства при программном способе управления следует считать программное устройство, определители, обеспечивающие выбор объектов коммутационной схемы для образования тракта передачи информации, и блоки включения коммутационных элементов в точках коммутации. Количество и структура функциональных блоков определяются структурой КС и алгоритмом работы УУ при обслуживании вызовов. Кроме основных блоков, УУ может содержать вспомогательные ФБ, собирающие информацию о состоянии некоторой совокупности однородных объектов, например информацию о наличии вызовов в определенной группе, о наличии свободных выходов в тех или иных направлениях, о наличии регистров с законченным приемом управляющей информации и т. п. Необходимость введения ФБ зависит от режимов работы ступеней искания, соотношений между структурными параметрами коммутационной системы,. а также требуемого времени установления соединения. В некоторых случаях во время обслуживания соединений одни и ФБ управляющего устройства можно использовать многократно для управления различными объектами КС. Такие ФБ по мере необходимости должны подключаться к различным объектам. Для этой цели используются подключающие устройства.
Определители, обеспечивающие выбор объектов КС в процессе установления соединения, составляют обязательный набор функциональных блоков, который должен содержать управляющее, устройство.
Синтез ФБ, с точки зрения получения наиболее рациональной структуры, необходим для получения оптимальной структуры всего УУ. Стандартизация оборудования ФБ управляющих устройств позволит ускорить процесс проектирования коммутационных узлов.
Функциональные блоки управляющих устройств, а также регистры, шнуровые и вспомогательные комплекты, комплекты абонентских и соединительных линий могут содержать электронные узлы, выполняющие отдельные операции в процессе их работы. Такими узлами являются узлы, выполняющие логические, счетные, запоминающие функции, функции усиления, корректирования и формирования сигналов требуемой формы, функции кодирования и декодирования и др.
Из определенной совокупности этих узлов синтезируются функциональные блоки и комплекты. Поэтому изучение и синтез этих узлов представляют собой самостоятельную задачу и изучаются в курсе «Основы дискретной автоматики».
13.2. ЭЛЕКТРОННЫЕ ОПРЕДЕЛИТЕЛИ
Общие сведения
Одной из основных функций управляющих устройств коммутационных систем являются выбор и включение коммутационных элементов, обеспечивающих установление соединения между входящими и исходящими каналами связи. Способ выбора требуемых коммутационных элементов (точек коммутации) зависит от режима работы всей КС или ее отдельных ступеней искания, парапет ров схемы группообразования и от состояния КС в момент поступления требования на установление соединения. Количество ФБ, обеспечивающих выбор точек коммутации, в первую очередь будет, определяться структурой КС, а объем этих блоков — ее парапет. рами. Как правило, в КС между каждым входом и каждым выходом имеется несколько соединительных путей. Число соединитель. ных путей, через которые может быть установлено соединение, в общем случае неодинаково и зависит от структуры, параметров и состояния КС в момент поступления требования, на соединение.. Поэтому УУ должно выбрать один из возможных соединительных путей и после этого включить элементы, обеспечивающие образованне тракта передачи через соответствующие звенья коммутации.
Выбор соединительного пути сводится к выбору точек коммутации, через которые должен быть установлен разговорный тракт между требуемыми входом и выходом КС. Для заданной КС в соответствии с режимом ее работы определяется функция образования (составления) тракта передачи между входом и выходом как конъюнкция функций выбора элементов в точках коммутации на соответствующих звеньях:
![]()
где — функции выбора (или включения) коммутационных элементов в соответствующих звеньях КС.
Точки коммутации выбираются раздельно для каждого звена КС, а элементы в точках коммутации включаются одновременно, после того как будут выбраны точки коммутации для всего соединительного пути. В отдельных случаях, где это целесообразно, элементы могут включаться последовательно. Способ включения элементов в точках коммутации выбирается при конкретном проектировании коммутационного узла с учетом технико-экономических показателей того или иного способа включения.
Выбор требуемых объектов КС и проверка их состояния в процессе установления соединения осуществляются определителями. В соответствии с выбираемыми объектами различают определители: входящих каналов (линий), промежуточных линий, точек коммутации, исходящих каналов, регистров и т. п.
Каждый объект КС характеризуется одной или несколькими координатами, причем в зависимости от типа КС координаты могут быть постоянными или приписываться временно только для соединения. Объекты, характеризующиеся несколькими, выбираются либо по каждой координате отдельно, по нескольким координатам одновременно. В процессе установления соединения определитель должен реализовать функцию бора объекта с определенным признаком и хранить информацию о его координате (или координатах) в течение некоторого, которое определяется длительностью установления соединения рез данную ступень искания или через всю КС узла. Если объективы выбора является коммутационный элемент, то функция выбора может одновременно являться функцией включения этого элемента. Определители, выбирающие объекты по одной координате, называются однокоординатными, а по нескольким координатам- многокоординатными (двух- трехкоординатными и т. д.). Функция выбора одного из N объектов в однокоординатном определителе представляет собой конъюнкцию от двух переменных сигнала характеризующего состояние объекта Х;, и координатного сигнала (сигнала выбора) а данного объекта в соответствии со значением его координаты: (13.2) где нижний индекс члена а означает тип объекта (Х, У, W), а верхний — его координату (i, j, ).
Каждый объект может находиться в одном из двух состояний с точки зрения возможности использования его для установления соединения. Информация о состоянии объекта должна в определитель по входу, связанному с оконечным устройством объекта (абонентским комплектом, шнуровым комплектом, соединительных линий и т. д.). Условимся приписывать сигналу х; значение 1, если объект может использоваться для соединения, и 0 во всех остальных случаях (занят, блокирован н. д.).
Определитель реализует некоторую совокупность функций вы6ора. Число функций зависит от количества объектов N, обслуживаемых определителем: F. Поскольку в процессе установления соединения определитель должен выбирать только Один объект Х; из всей совокупности объектов N, то в отдельные моменты времени только одна функция выбора может принимать Значение 1.
Определители могут работать в режиме свободного или вынужденного искания. При свободном искании определитель должен выбрать объект с требуемым признаком среди некоторой совокупности однородных объектов. На вход определителя поступают сигналы или непосредственно из программного устройства, или от генератора тактовых импульсов через схему И. Объекты могут выбираться в порядке определенной очередности, в порядке чистой случайности, а также в порядке поступления требований на ycтaновление соединений. При вынужденном искании определите должен выбрать требуемый объект или группу объектов (например, направление) по информации, полученной из регистра ал кодового приемника. В отдельных случаях одни и те же опрело летели могут работать в режиме как свободного, так и вынужденного искания.
Функция выбора объектов зависит от количества по которым определяется данный объект, от информации, характеризующей состояние объекта, и от структуры самого опрело теля. Различают динамические, статические и импульсно временные определители.
Динамические определители
В динамических определителях объект с требуемым признака выбирается в процессе поочередного опроса состояния всех объектов. Если в некоторой совокупности имеется несколько объект с соответствующим признаком, то выбор происходит в порядка принятой очередности опроса. Время отыскания объекта зависит от емкости определителя, т. е. количества объектов, которые обслуживает, скорости его работы, а также состояния определите в момент поступления требования на отыскание объекта.
Рассмотрим принцип построения динамических электронных определителей, которые выбирают объект по одной координат, .Такой определитель можно представить как конечный [10], работа которого может быть описана четырьмя множествами:
множеством входных сигналов, несущих информацию о состоянии объектов:
![]()
множеством входных сигналов, изменяющих состояния определителя:
![]()
множеством выходных сигналов, соответствующих функции выбора объектов:
![]()
множеством внутренних состояний определителя:
![]()
Функционирование определителя в дискретные моменты времени
описывается системой двух уравнений:

е s(t) и s(t — 1) — состояния определителя соответственно в моты времени 1 и (t — 1); u(t) — сигнал (или сигналы) на входе определителя, обеспечивающий изменение его внутреннего состоял; х; — сигнал, описывающий состояние объекта.
Уравнение (13.7) представляет собой функцию, описывающую родной сигнал определителя, т. е. функцию выбора объекта, а (13.8) — функцию перехода определителя из одного состоит в другое. Каждому состоянию определителя приписывается соответствующий координатный сигнал выбора объекта следовательно, координатный сигнал вписывается функцией внутреннего состояния определителя:

Определитель соответствующих объектов можно представить устройство, состоящее из двух частей: счетной схемы А определяющей координаты объектов Х и дешифратора реализующего функцию выбора объекта f, (рис. 13.1). Функционирование
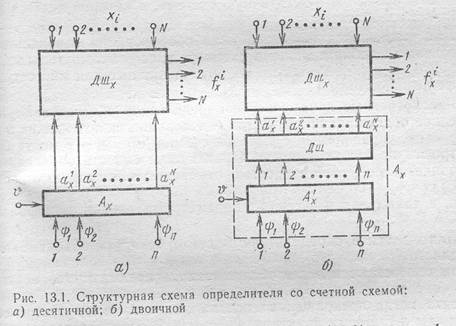
схемы А описывается (13.8) и (13.9); а дешифратора Дш,— уравнением (13.7). Каждому состоянию счетной схемы А динамического определителя соответствует координатный сигнал выбора а, одного из N объектов. Таким образом, число состояний счетной схемы определяется емкостью определителя (числом выходов ). Дешифратор представляет собой совокупность схем типа И, реализующих функции выбора соответствующих объектов. Число схем определяется количеством обслуживаемых объектов Для однокоординатного
определителя каждая схема типа И имеет два входа, на один из которых поступает сигнал х, описывающий состояние объекта Х, а на второй — координатный сигнал а формация о состоянии объектов должна поступать в определи или из оконечных устройств, или из оперативных запоминаю устройств ОЗУ, хранящих эту информацию.
При построении счетной схемы на N выходов в десятичной счисления (рис. 13.la) число элементов памяти и дол быть равно N+ I. Из них N элементов памяти используются запоминания значения координаты и выдачи соответствую сигналов а, а один элемент применяется для подготовки схем к приему информации.
При двоичной системе счисления число элементов уменьшается и составляет n=logqN, где NN (N' — ближайшее к N целое число, при котором также будет целы числом). Однако в этом случае появляется необходимость в уст ковке дешифратора Дш, через который выдаются сигналы а (рис. 13.1б). Дешифратор служит для перехода двоичной системы счисления, в которой записывается ординаты объектов, в десятичную систему, в которой ведется см выбираемых объектов.
Для уменьшения общего объема оборудования определителе с двоичными .избирательными схемами вместо прямоугольных а шифраторов можно использовать пирамидальные или дешифраторы [20].
Рассмотренные динамические определители обеспечивают поочередное обслуживание объектов — в порядке включения их в и. шифратор, управляемый с выходов счетной схемы, — и могут быть построены на любую емкость. Практически емкость определители ограничена требуемой скоростью отыскания объектов, скорость переключения элементов, на которых выполнена схема определи. теля, а также электрическими параметрами диодов дешифратор.
Динамические определители могут отыскивать объекты исходного (начального) положения, так и с того положения, в котором они остаются после обслуживания предыдущего объекта Эти определители хранят информацию о координатах выбранного объекта после прекращения сигнала из оконечного устройство (сигналы х;). Время, хранения информации определяется условия. ми работы управляющего устройства и ограничивается временем поступления на вход определителя сигнала, переводящего его следующее состояние. Следовательно, такой определитель представляет собой оперативное запоминающее устройство (ОЗУ), которое сохраняет информацию о координатах выбранного объекта время установления соединения через данную ступень искания ил всю КС узла. Это свойство динамического определителя позволяет сравнительно просто решать задачу повторных соединений, контроля за правильностью доставки информации и др.
Наличие блока памяти в динамическом определителе возможность использовать его в режиме как свободного, так и вынужденного искания. В последнем случае, кроме общего (счетное ) входа, каждый элемент памяти должен иметь отдельный вход, в который поступает информация со стороны регистра или кодовое приемника. Благодаря этому определитель можно принудительна останавливать в состояние выдачи требуемого координатного сигнала а. Рассмотренный ранее определитель, производящий выбор одного 5ъекта из N только по одной координате i, может быть построен как двухкоординатный. В таком определителе все N объектов разбиваются на А групп по и объектов в каждой группе (М=Ап), ля выбора объекта в определителе необходимо знать две координаты: координату r группы 8„ к которой принадлежит объект, я координату i объекта Х внутри группы, где r = 1, 2,..., А, а i =l, ,...,n.
Функция выбора объекта в таком определителе представляет Собой конъюнкцию от трех переменных: сигнала х описывающего состояние объекта Х; и координатных сигналов выбора.
Объект может быть выбран только в том случае, если функция
выбора принимает значение 1.
Для построения такого определителя требуются две счетные схемы 4, и А соответственно на k и состояний и дешифратор Дш содержащий N схем типа И, каждая из которых имеет три входа: х, а (рис. 13.2a).

При разделении N объектов на группы требуется наиболее целесообразное количество групп k и объем кажи группы и.
После преобразования функции выбора объекта может быть получено несколько новых форм записи этой

Схемы, реализующие первые две функции выбора, показа соответственно на рис. 13.2б и в.
Для приведенных форм записи функции (13.11) объем oбopудования двухкоординатного определителя будет одинаковым и с стоимость находится из следующего выражения:
![]()
где с и с2 — стоимости соответственно одного элемента счетных схем и одного элемента дешифраторов.
При синтезе определителя следует минимизировать выбора, т. е. отыскивать такую форму ее записи, которая обеспечивала бы минимальный объем оборудования при заданной скорости отыскания обслуживаемых объектов. Минимизацию функции можно проводить в соответствии с рекомендациями, изложенными в [22].
Аналогичным образом можно получить функции выбора ll трем, четырем, пяти и большему числу координат. По этим функциям могут быть синтезированы многокоординатные определителе
Выбор структуры определителя и количество координат зависят от емкости определителя У и требований к параметрам электрического сигнала, формируемого на выходе определителя переходе от однокоординатного определителя к существенно уменьшается объем оборудования. Увеличению числа координат от двух до трех существенного уменьшения оборудования не дает, а увеличение числа координат до четырех и более приводит к увеличению объема оборудования.
В отдельных случаях уменьшение оборудования можно полую чуть за счет использования в двоичных счетных. схемах или многоступенчатых дешифраторов. При этом увеличивается число диодов между выходами элементов памяти схемы и устройствами, которыми управляют определители.
Основное назначение управляющих устройств при тракта передачи через коммутационную систему узла в выборе точек коммутации на соответствующих звеньях соединения. Точки коммутации можно рассматривать, как объекты КС подлежащие выбору со стороны определителей при соединения между входом и выходом данной . Местоположение точки коммутации в соответствующем звене однозначно определяется координатами входа и выхода, связанными с нею (рис. 13.3). Состояние точки коммутации можно определить по состоянию входа и выхода. Поэтому функция выбора точки коммутации будет зависеть от четырех переменных: состояния входа х
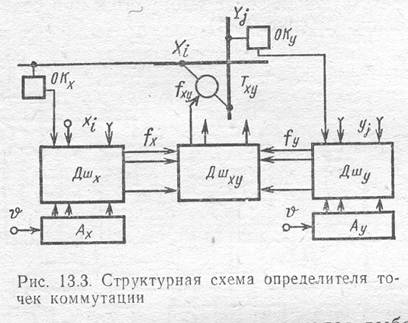 ,
,
состояния выхода у; и координатных сигналов выбора входа а, и выхода а. Для выбора точки коммутации необходимо, чтобы каждая из переменных принимала значение 1.
Следовательно, функцию выбора точки коммутации, например на звене А, можно представить как конъюнкцию этих переменных:
![]()
Функция (13.3), описывающая работу определителя точек коммутации звена А, реализуется двумя счетными схемами соответственно на и т состояний и дешифратором емкостью nm выходов. Дешифратор представляет собой совокупность схем типа И на четыре входа. Функцию выбора точки коммутации на основе ассоциативного закона можно привести к виду
![]()
Следовательно, функция выбора точки коммутации представляет собой конъюнкцию функций выбора входа f, и выхода f Д, т. е. для выбора точки коммутации при установлении соединения требуется совместная работа двух определителей: определителя входов и определителя выходов, каждый из которых может быть одно или многокоординатным.
Кроме определителей входов и выходов, для выбора точки коммутации необходимо иметь дешифратор емкостью nm выходов, реализующий конъюнкцию функций выбора входа и выхода. Каждый элемент дешифратора представляет собой схему типа И на два входа.
На рис. 13.3 представлена схема выбора точки коммутации в соответствии с функцией (13.14) . Поскольку для образования тракта передачи через КС требуется определять точки на соответствующих звеньях и ступенях искания, то управляют устройство должно содержать определители входов и выходами связанных с точками коммутации на каждом звене. Точка коммутации на соответствующем звене выбирается при совместной раб те этих определителей (рис. 13:4) .

к Изменение состояния определителя обеспечивается сигналами х, характеризующими состояние объектов, и сигналами обратной связи, представляющими собой функции выбора объектов .
Удержание определителя в состоянии выбора объекта обеспечивается входным сигналом х поэтому этот сигнал должен сох» заняться до включения коммутационных элементов. Статические определители выбирают объект или подготавливают его к выбору без каких-либо управляющих сигналов из ПУ или другого ФБ.
На рис. 13.5а и б представлены функциональные схемы стати веского определителя, реализующие соответственно функции

(13.15) и (13.16). Данные определители могут работать только режиме свободного искания.
Однако этот обьем оборудования может быть отнесен только к статическим определителям малой емкости, поскольку в определителях большой ем кости требуется установка усилителей или разделение всех входов на группы с целью обеспечения надежной блокировки входов одновременном поступлении сигнала (x = l) из нескольких оконечных устройств.
Достоинством статических определителей является высокая скорость работы при отыскании объектов с требуемым признаком. Практически скорость ограничивается скоростью переключен элементов, на которых выполнен определитель, К недостаткам относятся сравнительно большой объем оборудования и зависимость электрического режима работы элементов от количества блокируемых объектов, а также необходимость введения специальных схем для изменения преимущества выбора объектов. Импульсно- временной определитель представляет собой устройство, в котором каждый объект выбирается. при совпадении им пульсов от разных импульсных источников, имеющих разную длительность и частоту следования [20]. Каждому объекту отводится определенная временная позиция, в которой происходит сов падение импульсов, образующих код данного объекта.
13.3. БЛОКИ ВКЛЮЧЕНИЯ КОММУТАЦИОННЫХ ЭЛЕМЕНТОВ
Блоки включения, коммутационных элементов (БВКЭ) управляющих устройств квазиэлектронных и электронных систем пред: назначены для включения герконовых реле или электронных контактов разговорного тракта при установлении соединения между входом и выходом коммутационной системы, узла. Блоки включения являются исполнительными и получают управляющую информацию из других блоков управляющего устройства. Структура. блоков включения коммутационных элементов существенно зависит от структуры коммутационной системы. Независимо от типа применяемого коммутационного при, бора для управления коммутационным элементом необходимо выдать координатные сигналы выбора точки коммутации а; и а, и проверить ее состояние. Сигнал, характеризующий состояние точки коммутации , может принимать два значения (О или 1) . В одном из состояний, например 1, точка коммутации считается свободной и может быть использована для образования соединительного пути в КС при установлении соединений, а в состоянии 0 она занят а или блокирована и не может участвовать в образовании соединительного пути. Следовательно, для выбора и включения точки коммутации: необходимо совпадение трех. сигналов. Это условие может быть записано посредством логического произведения конъюнкпии1.
Функцию f J назовем функцией включения коммутационного элемента. Эта функция после перевода К9 в рабочее состояние ие остается равной 1, так как сигнал состояния элемента а; после установления соединения принимает значение, равное О. Поэтому удержание КЭ в рабочем состоянии должно обеспечиваться за счет внутренних свойств последнего или при помощи дополнительного элемента памяти в этой точке коммутации.
Сравнивая функцию включения КЭ (13.17) с функцией выбора объекта (13.10), можно заметить, что эти функции одинаковы, так как каждая из них представляет собой конъюнкцию координатных сигналов выбора соответствующего объекта, например КЭ, и сигнала его состояния.
Полученная зависимость между функциями включения КЭ f, и Р, казалось бы дает возможность получить сигналы для включения КЭ непосредственно из определителей. Однако это невозможно, так как в момент переключения КЭ сигнал его состояния а;; изменяет свое значение с 1 на 0 и функция включения принимает значение, равное О. Коммутационные элементы изменяют сигнал состояния с 1 на 0 несколько раньше, чем происходит их полное переключение. Например, контакты реле с целью обеспечения некоторого контактного давления замыкаются до того, как якорь окончательно притянется к сердечнику. Следовать но, сигналы включения К9 становятся равными 0 раньше, чем происходит полное их переключение, в результате чего элемент может возвратиться в исходное состояние.
Для обеспечения надежного включения КЭ необходимо, что бы функция ( не изменяла своего значения с 1 на 0 до полного его переключения. Это условие может быть выполнено при помощи дополнительного устройства в каждой точке коммутации, запоминающего предыдущее значение сигнала состояния КЭ на время, необходимое для полного его переключения. Однако это , потребует значительного увеличения объема оборудования коммутационной системы.
Возможен другой способ, при котором используется значение структурной функции определителя точек коммутации. Действительно, равенство 1 значения функции F, свидетельствует о том, что выбранный при помощи определителя КЭ свободен и сигнал его состояния а»» равен 1.,Следовательно, если значение функции F> равно 1, то в блок включения К9 (БВК9} можно выдавать сигнал, например из ПУ, разрешающий включать КЭ. В этом для построения БВК9 нет необходимости использовать сигнал состояния выбранного КЭ, а функцию его включения можно записать так:
где а, — сигнал, разрешающий включать выбранный КЭ (а,=1, если значение F, равно 1).
Поскольку в коммутационных системах при установлении соединения отыскиваются не точки коммутации на каждом звене, а' входы и выходы соответствующих звеньев, то для построения
БВКЭ используется значение структурной функции определителя. входов (или выходов). Равенство 1 значения структурной функции. входов (выходов) F является свидетельством того, что выбранный определителем объект (вход или выход) свободен и сигнал состояния КЭ, при помощи которого выбранный объект может быть подключен к заданному входу или выходу, равен 1. Значение функции F можно: фиксировать в определителе объектов. Если значение функции F равно 1, то с устройства, фиксирующего это значение, выдается сигнал, разрешающий включать КЭ.
Для включения всех коммутационных элементов в БВКЭ необходимо иметь; столько схем И, сколько точек коммутации в управляемой коммутационной системе. Так, блок включения коммутационных элементов в коммутаторе (рис., 13.6), имеющего и входов и т выходов, состоит из nm схем И, каждая из которых; формирует сигнал на одном выходе блока. В этом случае блок включения представляет собою схему, состоящую из (n+; +и+1) входных шин, на которые пода

координатные сигналы выбора коммутационных элементов а и и, и сигнал: а, разрешающий их включать, а также nm выходных шин, каждая из которых соединяется с тремя соответствующими входными шинами при помощи схемы совпадения И.
Таким образом, условие передачи сигналов на выходы БВКЭ определяется группой функций f i от входных переменных а;, а,; .а>, число которых на единицу больше числа координат, определяющих каждый элемент. Блок включения представляет собой схему, число входов которой (s+1), а число выходов Т равно числу включаемых КЭ (s — сумма числа значений всех координат, определяющих КЭ). Следовательно, при построении БВК9 можно использовать методы синтеза схем со многими выходами.
Работа логической схемы, имеющей (s+1) входов и Т выходов, описывается совокупностью функций f Д каждая из которых определяет закон функционирования схемы по одному выходу:
![]()
Если реализовать функции включения, входящие в совокупность (13.20) независимо друг от друга, то схема со многими выходами, реализующая эти функции, будет содержать nm изолированных цепей. Однако в общем случае структуру этой схемы можно упростить за счет того, что отдельные цепи содержат схемы совпадения, соответствующие одинаковым членам функций включения. Таким образом, минимизация схем БВКЭ сводится к выявлению выражений, одинаковых для всех функций включения. Эти выражения можно реализовать только один раз, а сигналы с их выходов использовать .многократно.
Рассмотрим синтез блоков включения двухзвенных коммутационных систем. Каждая точка коммутации звена А двухзвенной коммутационной системы (рис. 3;9) определяется координатами 1, а точка коммутации звена В — координатами j, г и у. Блок включения коммутационных элементов каждого звена должен реализовать соответственно совокупность функций включения:

В этом случае лучшее использование общих схем И будет при реализации БВКЭ в соответствии с выражением (13.24), так как . Схема блока включения КЭ звена А, построенного указанным способом, состоит из трех ступеней схем И на два входа каждая и представляет собой пирамидальный дешифратор.

Как следует из выражения (13.21), БВКЭ звена А состоит из схем И на четыре входа каждая, реализующих функции включения. Если каждая схема И содержит четыре диода, то для построения БВКЭ потребуется диодов., Уменьшить количество диодов можно за счет наличия схем И, реализующих одинаковые выражения функций включений. Общим и всех функций включения этого вида является сигнал а. Каждый координатный сигнал а является общим для функций включения, каждый координатный сигнал а, — для Функций и каждый координатный сигнал а; — алкал функций. При общей для большего числа функций включения является каждая из схем И, реализующих выражения. Учитывая это, совокупность функций включения коммутационных элементов звена А можно записать следующими способами:

(13.25) В общем случае при таком способе построения БВК9 пирами дальней дешифратор содержит Ь ступеней схем И (Л — число ко ординат, характеризующих точку коммутации). Следовательно, при использовании пирамидального дешифратора количество диодов в БВКЭ первого звена сокращается:

При тл,3 1 и )1 отношение (13.26) равно Q/Q2. Такая образом, если число координат, по которым определяется коммутационный элемент, равно или больше трех, то для уменьшения объема оборудования БВКЭ целесообразно использовать пирамидальные дешифраторы.
Подобным образом может быть построена схема БВКЭ звени В двухзвенной коммутационной системы. Если совокупность функций включения элементов звена В записать следующим образов
![]()
то можно заметить, что схемы И, реализующие выражения
![]()
могут быть общими для двух блоков включения, при условии, что включение КЭ звеньев А и В производится одно временно после определения значений всех координат. Это условие может быть записано следующим образом:
(13.28) Тогда совокупности функций включения и записываются на звене А

Как видно из рис. 13.7, такая схема БВКЭ содержит на
диодов меньше, чем содержали бы два блока включения, построенные отдельно.
Следовательно, для уменьшения объема, оборудования БВКЭ путем использования общих схем совпадения, реализующих одинаковые члены функций включения, необходимо определить общие координаты для различных звеньев коммутационной системы. Координатные сигналы, соответствующие этим координатам, должны поступать на схемы И первых ступеней блоков включен ч.
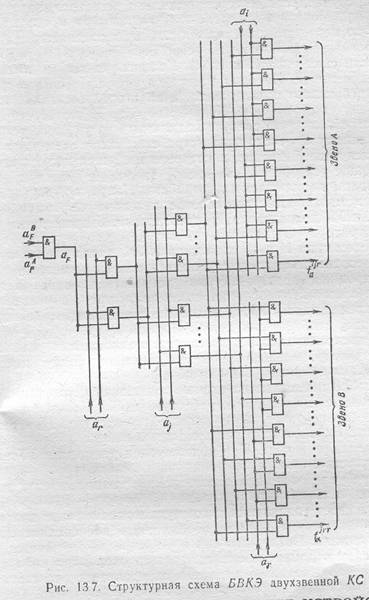
13.4. ЭЛЕКТРОННЫЕ ПОДКЛЮЧАЮЩИЕ УСТРОЙСТВА
Коммутационное оборудование АТС состоит из нескольких ступеней искания, в каждую из которых может входить несколько коммутационных блоков. Применение быстродействующих управляющих устройств позволяет использовать в однотипных коммутационных блоках для установления соединения одни и те же УУ ри этом появляется необходимость в подключающих устройствax, которые поочередно подключали бы УУ к тому или коммутационному блоку. Аналогичная задача должна выполнятся и в том случае, если имеется несколько регистров, которые н обходимо подключать в определенной очередности к одному и тому же УУ по мере установления тех или иных соединений. Электронные подключающие устройства состоят из некоторого совокупности схем типа И и ИЛИ. Каждая схема И- имеет да входа и один выход. На один из входов поступает сигнал из устройства, требующего подключения, а на второй — сигнал из УУ, разрешающего подключение. Количество схем И соответствует количеству цепей, которые следует подключать из .каждого устройства, умноженному на число этих устройств. Число схем типа ИЛИ определяется числом входов, к которым требуется подключать соответствующие устройства, а число входов в каждую схему ИЛИ — числом подключаемых устройств. Например, двухзначных регистр при многопроводном способе передачи информации подключается к УУ посредством 16 проводов, по 8 проводов от каждого регистратора. Следовательно, для каждого регистра потребуется 16 схем типа И 16 схем типа ИЛИ, число входов в которых будет соответствовать числу подключенных регистров.
К электронным подключающим устройствам предъявляются следующие основные требования: высокое быстродействие, сравни- мое с быстродействием УУ, и возможность одновременного подключения всех необходимых цепей. Последнее требование особенно важно, поскольку неодновременность подключения цепей может вызвать неправильный прием информации ввиду высокого быстродействия приемных элементов.
На рис. 13.8 представлена схема подключающего устройства для подключения двухзначных регистров к УУ. Каждый регистр, как было показано ранее, имеет регистратор десятков Р и регистратор единиц Р в которых информация о номере абонента записывается в двоичном коде. При подключении регистра к УУ в последнем осуществляется дешифрация информации и обеспечивается выбор требуемой линии. Поскольку информация, о номере абонента может быть принята несколькими регистрами одновременно, а УУ обслуживает соединения в коммутационном блоке поочередно, схема подключения должна обеспечивать поочередное считывание информации, После того как в регистре заканчивается прием информации о номере абонента, триггер окончания набора номера Т г, переключается и выдает в определитель регистров ОР УУ сигнал о готовности регистра к выдаче информации. Определитель регистров определяет в заданной очередности состояние регистров посредством выдачи сигнала опроса на схему И, связанную с соответствующим регистром. Если, например, на регистре Р закончился набор номера и определитель ОР выдал сигнал на схему И, то последняя, переключается и на входах схем первой группы И — H в схеме подключения СП появляется сигнал, разрешающий считывание.
ИЛИ i — ИЛИ, а на входы дешифраторов Д и Да, h У, Посредством дешифратора Дш А выдается сигнал выбора в АК, номер которого соответствует цифрам, записанным в Рд и Р, регистра Р1 Одновременно с выдачей сигнала в схему СП выдается сигнал на остановку

определителя регистров ОР на время передачи информации в УУ и установления требуемого соединения, после чего ОР переходит к опросу следующего регистра. Если в этот же момент на другом регистре, например Р, закончился прием информации о номере, то эта информация не может быть считана, пока определитель регистров не опросит его состояние, а это может произойти только, когда закончится установление соединения для абонента, занявшего регистр Pi.
ГЛАВА 14 ЭЛЕКТРОННЫЕ КOMIIЛEKTЫ И PЕГИСТРЫ
На коммутационном узле (станции) связи каждая включает MBA линия оборудуется оконечным (линейным) комплектом. Этот комплект обеспечивает прием и передачу сигналов для установления и разъединения соединений, линейных сигналов, передаваемых по линии (каналу) связи, а также сигналов, которыми обманываются линейные комплекты с управляющими устройствами п процессе установления и разъединения соединений. В некоторая случаях эти комплекты выполняют функции корректора сигналом.
Удельный вес оконечного оборудования достаточно велик, потому при синтезе его комплектов следует стремиться к максимальному упрощению.
Схема оконечного комплекта зависит от типа линий, которыми включаются в коммутационный узел (станцию). Различают комплекты: индивидуальных абонентских линий АК; линий спаренных телефонных аппаратов КСА; линий монетных автоматов; комплекты различных соединительных линий КСЛ (линий между однотипными АТС, между АТС различных систем, линий от подстанций п учрежденческих станций различных систем и т. д.). Кроме того, на АТС имеются комплекты, обеспечивающие питание микрофонов абонентских аппаратов и прием сигналов отбоя, так называемые шнуровые комплекты ШК и ряд других. При разработке этого типа оборудования на электронных элементах следует иметь в виду, что ШК и КСЛ включаются в разговорный тракт и, следовательно, влияют на качество передачи разговорных сигналов в части вносимого и переходного затухания. Поскольку и то и другое затухание нормируется, схемы комплектов должны рассчитываться таким образом, чтобы указанные затухания находились в пределах установленных норм для всего тракта передачи.
На автоматических телефонных станциях с косвенным управлением требуются регистры (или комплекты) для приема и фиксации информации о номере вызываемого абонента и передачи в той информации в управляющие устройства. Регистры выполняются на различных электронных и магнитных элементах. Выбор типа элемента определяется требованиями к регистру. В процессе установления соединений регистр и управляющее устройство обмениваются информацией, которая передается, как правило, в кодированном виде, поэтому на АТС, помимо электронных регистров, требуются также кодовые приемопередатчики, выполненные на электронных или магнитных элементах.
14.2. ЭЛЕКТРОННЫЙ АБОНЕНТСКИЙ КОМПЛЕКТ
Абонентские комплекты АК являются наиболее массовым видом оборудования АТС, поэтому при разработке станции стремятся по возможности сделать схему комплекта наиболее простой и содержащей минимальное число элементов. Исходя из этого в системах с общими управляющими устройствами стремятся часть функций, выполняемых АК, передать в общее управляющее устройство и тем самым сократить общий объем оборудования, поскольку УУ используется многократно. Таким образом функции АК выполняют как бы два блока: собственно абонентский комплект, которым оборудуются все абонентские линии на АТС, и общее устройство — определитель абонентских линий ОАЛ, устанавливаемый в УУ и связанный со всеми АК. В определителе абонентских линий, в свою очередь, также можно выделить элементы схем, число которых равно числу АК, и общие схемы, занимаемые независимо от того, какой комплект обслуживается. Функции АК при входящей и исходящей связи различны. При исходящей связи АК отмечает поступление вызова от абонентского аппарата, принимает сигнал подключения УУ и совместно с ним включает коммутационные элементы в КС. После установления соединения АК отмечается занятым для входящей связи.
При входящей связи АК принимает сигнал занятия из УУ, блокируется от нового занятия и вместе с УУ подготавливает или включает коммутационные элементы. На рис,
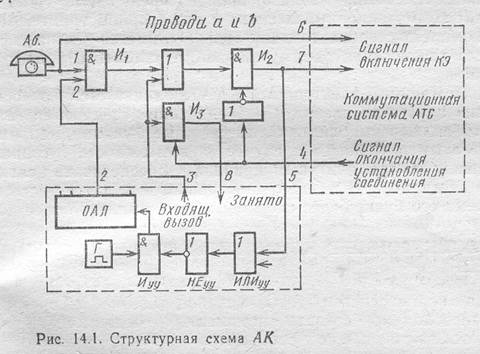
Определитель абонентских линий поочередно опробует состояние АК, и если последний не находится в состоянии вызова, то ОАЛ опробует АК, связанный со следующей абонентской линией, и т. д. Если абонент произвел вызов, то на вход 1 схемы поступил соответствующий потенциал и подготовил эту схему к работе. Как только определитель подключится к данному АК и подаст на вход 2 схемы потенциал, обеспечивающий ее переключение, на выходе схемы И| появится рабочий сигнал. Этот сигнал, пройдя через схемы ИЛИ и , включит (или подготовит к включению) соответствующий коммутационный элемент в разговорном тракте. Схема И была подготовлена к открытию еще в исходном состоянии, так как на входе схемы НЕ потенциал отсутствовал. Одно- временно с сигналом на включение КЭ подается сигнал на схему ИЛИЮ и далее на схему . В результате закроется схема И и импульсы от генератора перестанут поступать в определитель, благодаря чему последний будет находиться на выходе к данному
АК до окончания установления соединения через КС станции. Когда соединение будет установлено, на вход 4 поступит сигнал окончания установления соединения. При этом подготовится к открытию схема ИЗ, переключится схема НЕ и закроется схема И2, определитель перейдет к обслуживанию других абонентов. Если кок мутационный элемент не обладает свойством памяти, то он удерживается в разговорном тракте специальной схемой. В случае повторного подключения определителя к АК, уже занятому разговором, сигнал пройти на выход не сможет, так как закрыта схема И2.
Если в данный АК поступил входящий вызов, о чем свидетельствует появление сигнала на входе 3, то АК через схему Из пере- даст в УУ сигнал «Занято». При поступлении входящего вызова в свободный АК сигнал входа 8, пройдя через схемы ИЛИ и Н2, включит коммутационный элемент в разговорном тракте. Абонентский комплект освободится, как только снимется сигнал с входа 4, после выключения коммутационного элемента разговорного тракта.
Рассмотренный электронный АК выполняет только основные функции при установлении и разъединении соединения на АТС, Если он должен выполнять более сложные функции, например посылать зуммер «Занято» в случае невозможности установления соединения по тем или иным причинам, обеспечивать сигнализацию о неисправности абонентской линии и т. д., то естественно, что схема его будет более сложной и сам комплект более дорогим.
14.3. ЭЛЕКТРОННЫЕ КОМПЛЕКТЫ СОЕДИНИТЕЛЬНЫХ ЛИНИЙ
Для новых систем АТС механоквази и электронного типа необходимо создать комплекты соединительных линий <CJ7, обеспечивающие совместную работу указанных ATC между собой и с существующими АТС электромеханического типа. Следует стремиться к тому, чтобы КС7 был построен на тех же элементах, что и в согласуемых системах ATC. Например, если на сети, где действуют АТС декадно-шаговой системы, появляются станции с электронным управлением, желательно, что- бы КСЛ, устанавливаемые на АТС шаговой системы, были релейными, а на АТС с электронным управлением — электронными. Это обеспечивает однотипность применяемого оборудования и источников питания, облегчает обслуживание станций техническим персоналом.
Основными функциями, выполняемыми КСЛ, являются: прием и коррекция импульсов набора номера с последующей трансляцией их в регистр; контроль состояния проводов соединительной линии; удержание комплекта в рабочем состоянии; прием и передача сигнала отбоя; выдача зуммерных сигналов (а иногда сигналов посылки вызова). Кроме того, КСЛ выполняет другие функции, специфические для согласуемых систем.
передает информацию о состоянии. соединительной линии в управляющее устройство;
обеспечивает цепь удержания коммутационного элемента во время разговора;
принимает сигнал отбоя по исходящей соединительной линии из схемы РСЛ опорной ATC;
обеспечивает освобождение приборов подстанции после отбоя;
передает
сигнал о блокировке исходящей соединительной линии в блок дистанционной
сигнализации, откуда выдается сигнал на опорную ATC. Д1 112 1и +2 84 -H I 
Комплект исходящей соединительной линии (рис. 14.2) р„с 14 2, с имеет четыре электронных ключа на транзисторах.
Транзистор Tl предназначен для контроля состояния и исправности соединительной линии. Транзистор T2 служит для приема сигнала отбоя со стороны опорной ATC. Транзистор T3 обеспечивает передачу сигнала о состоянии соединительной линии в УУ. Транзистор Т4 предназначен для обеспечения цепи удержания коммутационного элемента во время разговора.
Схема ИКСЛ работает следующим образом.
В исходном состоянии ИКСЛ, когда соединительная линия исправна и свободна, на проводе а (вход 4) имеется отрицательный потенциал, а на проводе Ь (вход 5) — нулевой потенциал из Рассмотрим в качестве примера схему исходящего электронного комплекта соединительной линии ИКСЛ подстанции ПС-КЭ-100 при включении ее в опорную АТС декадно-шаговой системы. Этот комплект, устанавливаемый на подстанции, предназначен для приема и посылки линейных сигналов по исходящей соединительной линии между координатно-электронной подстанцией ПС-КЭ-100 и опорной АТС декадно-шаговой системы АТС-47 или АТС-54 [20]. Электронный комплект ИКСЛ разработан для совместной работы через соединительную линию с релейным комплектом РСЛ, применяемым для координатной подстанции с релейным управлением ПС-МКС-100 с сохранением всех сигналов взаимодействия, передаваемых по соединительным линиям.
Схема электронного комплекта исходящей соединительной линии ИКСЛ выполняет следующие функции:
контролирует исправность соединительной линии; контролирует состояние соединительной линии и связанного опорной АТС;
схемы РСЛ опорной АТС. Благодаря этому транзистор закрыт, а транзистор Т2 открыт. С коллектора открытого транзистора Т2 нулевой потенциал поступает на базу транзистора ТЗ и держит его в закрытом состоянии. Отрицательный потенциал с коллектора транзистора ТЗ подается на выход б в определитель исходящих соединительных линий, что служит признаком исправности и свободности данной соединительной линии.
Одновременно с коллектора транзистора ТЗ подается отрицательный потенциал на базу транзистора Т4 и последний открывается, чем подготавливает цепь удержания коммутационного элемента (выход 7).
При установлении исходящего соединения определитель исходящих линий отыскивает свободную и исправную исходящую линию, а следовательно, и связанный с ней ИКСЛ.
Если данный ИКСЛ выбран, то после включения коммутационного элемента создается цепь его удержания через открытый транзистор Т4. С этого момента данная исходящая линия отмечается занятой. В таком состоянии схема ИКСЛ остается до поступления сигнала отбоя из РСЛ„опорной АТС. Сигнал отбоя абонентов подстанции воспринимается на опорной АТС и сопровождается проводов а и b соединительной линии. При этом открывается транзистор Т1, а транзистор Т2 закрывается.
С коллектора транзистора Т2 подается отрицательный потенциал на базу транзистора ТЗ и одновременно на выход 3 в блок дистанционной сигнализации БДС. Транзистор Т8 открывается и закрывает транзистор Т4. При закрывании транзистора Т4 происходит выключение коммутационного элемента, участвующего в данном соединении.
Открываясь, транзистор ТЗ одновременно подает нулевой потенциал на выход б на все время переполюсовки проводов а и b, что служит признаком занятости данного ИКСЛ. Таким образом со стороны УУ этот ИКСЛ не может быть занят до тех пор, пока вызванный абонент не даст отбоя и на проводах соединительной: линии не появятся потенциалы исходного состояния. Следовательно, этот сигнал подается на все время переполюсовки.
Если время переполюсовки превысит 200 мс (вызванный абонент не дал отбоя или не освободится 1/П ГИ, связанный с данной соединительной линией), то в блоке дистанционной сигнализации вырабатывается сигнал блокировки исходящей соединительной линии, который передается на опорную АТС.
Электронные регистры используются в автоматических телефонных станциях с косвенным управлением. Регистры позволяют отделить этап приема импульсов набора номера от этапа управления приборами АТС при установлении соединения. Благодаря этому скорость установления соединения на ступенях искания не за- висит от скорости набора номера абонентом и определяется скоростью работы приборов управления и приборов, коммутирующих ; разговорный тракт, а также скоростью передачи информации из регистра в УУ на соответствующих ступенях искания.
В электронных, квази и механоэлектронных АТС регистры после приема информации о номере вызываемого абонента обеспечивают быстродействующую передачу этой информации в электронное управляющее устройство. Как правило, информация из регистра передается в кодированном виде. В некоторых случаях регистр выполняет дополнительные функции, зависящие от системы АТС, способа взаимосвязи регистра с управляющими устройствами, способа подключения и т. п.
Рассмотрим схему двухзначного регистра, выполненного на диодах и транзисторах. Схема предназначена для приема и фиксации двух цифр абонентского номера, выдачи сигнала окончания набора номера в УУ и передачи информации о зафиксированном- номере в УУ.
На рис. 14.3 представлена структурная схема регистра, а на рис. 14.4 — его принципиальная схема. Регистр содержит следующие
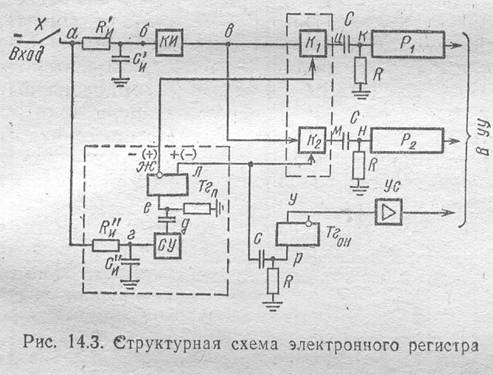
блоки: два регистратора Р и Р> (десятков и единиц): два клапана (схемы типа И) K i и К2, корректор импульсов КО; переключатель серии ПС, состоящий из серийного устройства СУ а переключающего триггера Т г триггера окончания набора номера
Регистраторы предназначены для приема и фиксации цифр десятков и единиц абонентского номера и передачи накопленной ин- формации в дешифратор УУ. Состоят они из четырех триггеров. На рис. 14.4 показаны схемы только триггеров. Клапаны KI и К2 предусмотрены для передачи импульсов серии десятков и серии единиц абонентского номера в соответствующие регистраторы Р и Р>. Каждый клапан состоит из двух транзисторов, включенных последовательно
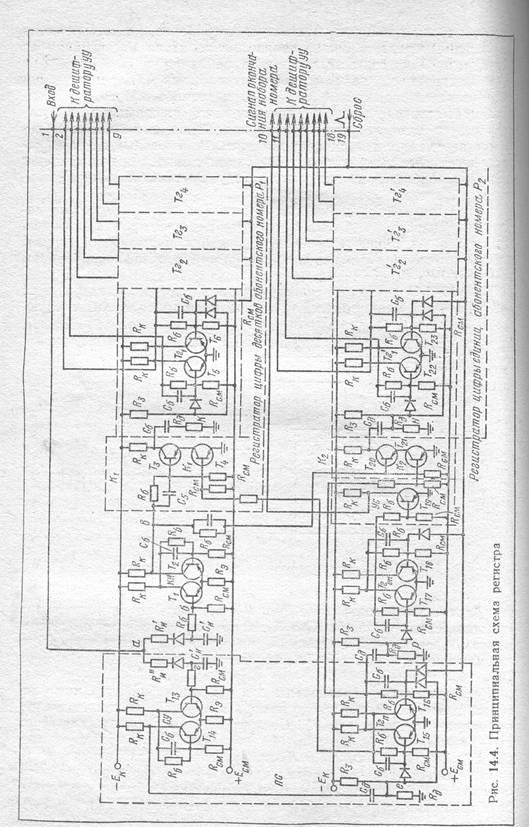
14.4 и 14.5 эти точки обозначены строчными буквами. IILI INJ IILI В исходном состоянии регистра все триггеры счетных UUU схем Р, и Р, находятся в положении, при котором левые (по ) схеме) транзисторы открыты, 2) а правые закрыты. С коллектора транзистора переключающего триггера Т г, подается отрицательный потенциал на базу транзистора Т клапана T

К, благодаря чему транзистор 1 открыт и клапан К подготовлен к открытию. С коллектора и) 11 Д I открытого транзистора Т переключающего триггера Тг, на базу транзистора Т клапана л) 1( подается потенциал земли, что обеспечивает последнему закрытое состояние.
После занятия регистра на y) его вход (точка а) поступают
отрицательные импульсы десятков. Эти импульсы, y)l проходя интегрирующую цепочку , посту па ют н а вход корректора импульсов КИ (точка б). При каждом импульсе транзистор Т1 открывается, а транзистор Т, закрывается, и с его коллектора отрицательный потенциал подается на базы транзисторов Т, и Т20 (точка в) клапанов К и Кг. Так как транзистор Т закрыт, то клапан открыться не может, клапан l будет открываться при каждом им Функцией корректора импульсов КИ является исправление , {формирование) фронтов импульсов, поступающих с линии. Корректор содержит транзисторы Т1- и Т2 и интегрирующую цепь С. Переключатель серий ПС предназначен для переключения клапанов K i и К2 после окончания соответствующих серий импульсов. В состав его входят серийное устройство СУ с интегрирующей цепью R",С", на входе и переключающий триггер Т г на транзисторах Ти , который управляет работой клапанов К и К2. Триггер окончания набора Т г, выдает сигнал об окончании набора номера в УУ. На рис. 14.5 приведена диаграмма напряжений в различных точках схемы регистра во время фиксации двух серий импульсов а номе а На схемах
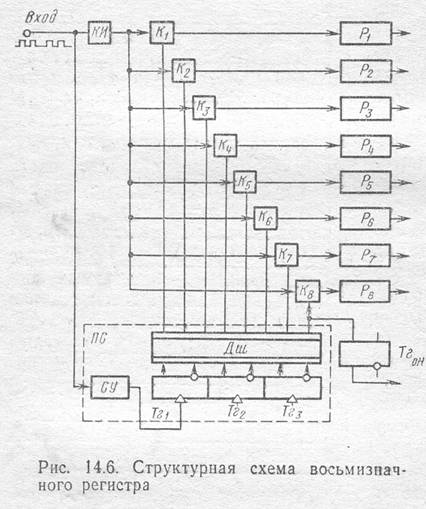
переключающего триггера- Т г поступит положительный импульс. Триггер Т г,. переключится, закроет клапан К1 и подготовит к открытию клапан К. Состояние счетных Тг регистратора цифры десятков Р, будет зависеть от набираемой цифры.
При поступлении на вход регистра второй серии импульсов переключаются триггеры счетной схемы регистратора цифры единиц Р2. По окончании второй серии импульсов счетная схема Р, будет находиться в состоянии, Серийное устройство снова переключит триггер Тг последний закроет клапан Ка и подготовит к открытию клапан К1, обеспечивая тем самым прием импульсов на Р при новом занятии регистра. Одновременно переключающий триггер Тг, переключит триггер окончания набора .и с коллектора транзистора Т4я будет выдан сигнал окончания набора номера (отрицательный потенциал) в УУ.
После выдачи регистром сигнала окончания набора номера происходит считывание зафиксированной информации; при этом выходы регистраторов (коллекторы счетных триггеров подключаются к УУ. Ли 1( 1 Тгг Ггг пульсе, и с его выхода (с дифференцирующей цепочки Сд Рд) будут поступать положительные импульсы на вход первого счетного триггера Тг1 регистратора цифры десятков Р4.
Одновременно импульсы серии десятков поступят на серийное устройство Ch переключателя серий ПС через интегрирующую цепочку 4т"С",. От первого импульса Ch переключится (транзит. тор Ti откроется, а транзистор Т14 закроется), при этом с транзистора Т 4 отрицательный потенциал поступит на вход: триггера Т г,. Триггер переключается только положительными импульсами, т. е. он останется в исходном состоянии.
Благодаря наличию на входе серийного устройства интегрирующей цепочки с большой постоянной времени СУ останется в переключенном состоянии до окончания серии. После окончания серии СУ вернется в исходное состояние, а на вход:.
При освобождении регистра все триггеры Положительным 'импульсом «Сброс» принудительно устанавливаются в исходное состояние.
Для получения схемы регистра на любое заданное число знаков достаточно в схеме переключатели серий иметь вместо одного переключающего триггера счетную схему на заданное число знаков абонентского номера. Для 6, 8-значного регистра в схеме 1lC необходимо иметь счетную схему из трех триггеров Ta> — Тг, с дешифратором Дш (рис. 14.6),
ГЛАВА 15 КВАЗИЭЛЕКТРОННЫЕ И ЭЛЕКТРОННЫЕ АТС
В настоящее время во многих странах мира ведутся разработки новых систем АТС, базирующихся на современных достижениях электроники и вычислительной техники. Г1оскольку еще не найден электронный элемент для коммутации разговорного тракта, способный конкурировать по своим технико-экономическим показателям с металлическим контактом соединителей и реле, создаются системы АТС, в которых для коммутации разговорного тракта используются приборы с металлическими контактами, а устройства управления построены на электронных и магнитных элщиеитах. В коммутационных системах АТС используются: 1) обычные или малогабаритные многократные координатные и кодовые соединители. Эти системы получили название механоэлектронных АТС; 2) быстродействующие реле с герметизированными контакта- ми, называемыми герконами, или реле с открытыми контактами (типа ESK). Такие АТС называются квазиэлектронными или полуэлектронными.
Наибольший интерес представляют квазиэлектронные системы АТС (КЭАТС), в которых благодаря быстродействию элементов, коммутирующих разговорный тракт, более эффективно используются электронные устройства управления. Разрабатываемые квазиэлектронные ATC отличаются между собой большим разнообразием основных технических решений j22].
Квазиэлектронные АТС классифицируются по следующим признакам.
1. По типу металлического контакта, используемого для коммутации разговорного тракта: герметизированные контакты (герконы); открытые контакты.
2. По способу управленим элементом в точке коммутации: индивидуальные обмотки для каждого элемента; общие обмотки на группу элементов, расположенные горизонтали и вертикали коммутационной схемы; по принципу МКС (электромеханический).
3. По способу удержания элемента а рабочем положении: электрический; магнитный; механический.
4. По проводности точки коммутации: двух- или четырехпроводные (только разговорные провода); трех, четырех-, пятипроволные и т. д. (кроме разговорных, существуют служебные провода— пробные, удержания).
5. По способу управления установлением соединения: централизованное управление с замонтированной программой; централизованное управление с записанной программой.
6. По способу хранения информации о состоянии коммутационной системы: посредством служебных проводов и контактов КС; в запоминающем устройстве.
Анализ разработок квазиэлектронных АТС показывает, что в качестве управляющих устройств в коммутационных узлах различного назначения (АТС, АМТС, УИС, УВС, УАТС и т. д.) находят применение специализированные электронные управляющие машины ЭУМ [21, 26]. Эти машины, кроме основных функций по установлению соединений, контролируют состояние оборудования, учитывают телефонную нагрузку и потери сообщения на отдельных направлениях, определяют номер вызывающего абонента при автоматической междугородной связи, производят тарификацию междугородных переговоров и т. д.
Для построения специализированных управляющих машин используются новейшие достижения, имеющиеся в вычислительной технике и интегральной электронике.
В разрабатываемых КЭАТС предусматривается возможность предоставления абонентам по мере необходимости дополнительных видов обслуживания, таких, как сокращенный набор номера для наиболее часто вызываемых абонентов, автоматическая переадресация вызова на другой телефонный аппарат, установка на ожидание в случае занятости вызываемого абонента, конференц-связь, наведение справок без нарушения установленного соединения и т. д.
15.2. КВАЗИЭЛЕКТРОННЫЕ АТС С ЗАПИСАННОЙ ПРОГРАММОЙ
Общие сведения
Системы квазиэлектронных АТС различаются по назначению,: емкости, способу построения управляющих устройств и другим показателям. Рассмотрим один из способов построения КЭАТС большой емкости для городских телефонных сетей с управлением посредством ЭУМ и записанной программой.
Комплекс оборудования КЭАТС позволяет строить городские опорные АТС, узлы исходящего и -входящего сообщений УИВС и подстанции. Опорные АТС могут работать на районированных и нерайонированных городских телефонных сетях и иметь емкость до 20000 абонентских линий с удельной нагрузкой 0,1 Эрл. Квазиэлектронная АТС имеет блочное построение и может наращиваться блоками по 4096 абонентских линий. Емкость узлов исходящих — входящих сообщений — до 4096 линий с возможностью наращивания блоками по 1024 линии. Нагрузка на вход составляет 0,6 Эрл. На УИВС может быть образовано от 20 до 130 направлений. В направлениях к другим узлам сети число линий может быть от 100 до 1000 линий, в направлениях к опорным АТС — от 20 до 180. Коммутационная система АТС строится на основе коммутационных блоков, выполненных на двухпроводных многократных ферридовых соединителях МФС емкостью 8)(8. Параметры абонентских и соединительных линий приведены в табл. 15.1.

На КЭАТС предусматривается предоставление следующих дополнительных видов обслуживания (ДВО): сокращенный набор номера наиболее часто вызываемых абонентов сети; сопровождающий вызов при внутристанционной связи, позволяющий направить вызовы на другой ТА, где в данный момент находится вызываемый абонент; автоматическое временное отключение ТА для входящей связи; передача входящих вызовов на бюро поручений на время отсутствия абонента; автоматическая передача вызова на другой ТА при занятости вызываемого абонента, организация конференц-связи для группы в 3 — 5 абонентов в пределах одной АТС; подключение к различным автоинформаторам.
Предусматривается передача управляющей информации между КЗАТС по общему каналу сигнализации (ОКС), а между КЭАТС и существующими системами АТС — по разговорным проводам. Связь с существующими системами АТС предусматривается через опорные КЭАТС.
Для построения КЭАТС используются многократные ферридовые соединители (двух- или четырехпроводные), электронные полупроводниковые приборы (транзисторы, диоды, стабилитроны, тиристоры), в основном кремниевые, имеющие высокую устойчивость к тепловым воздействиям, интегральные микросхемы, что позволяет уменьшить массу, габариты, потребляемую мощность оборудования и повысить его надежность, В отдельных блоках и комплектах используются герконовые реле.
Конструктивная единица оборудования КЭАТС, называемая секцией, имеет следующие конструктивные размеры: высота 2600 мм, ширина 800 мм. Оборудование размещается рядами, ряды компонуются парами, монтажной стороной друг к другу. Рас- стояние между монтажными сторонами 600 мм. Проход между рядами 1000 мм.
Электропитание осуществляется от аккумуляторной батареи, работающей в буферном режиме с выпрямительными устройствами. Напряжение питания 60+10% В. Для получения других градаций напряжения, требуемых для отдельных групп оборудования, устанавливаются вторичные источники питания ВИП, преобразующие постоянное напряжение 60 В в постоянное стабилизированное напряжение следующих градаций: для коммутационного оборудования: +5, — 12, +12,6 и +24 В; для управляющего-комплекса: 2,4, 5, 6,3, 12,6, 20, 27 и 40 В. Вторичный источник питания построен в основном на транзисторах, обладает малыми размерами, массой и высокой надежностью. Он устанавливается на стативах совместно с питаемым оборудованием.
Структура коммутационной системы КЭАТС
На рис. 15.1 представлена структурная схема коммутационной системы опорной КЭАТС. Коммутационная система строится из коммутационных блоков абонентских БАЛ и соединительных БСЛ линий.

В основу построения КС положен блочный принцип, обеспечивающий гибкость системы при изменении емкости станции и телефонной нагрузки. Блоки БАЛ и БСЛ имеют четырехзвенное построение. Во входы блоков БАЛ включаются абонентские линии, в выходы блоков БСЛ — комплекты исходящих ИКСЛ и входящих ВКСЛ соединительных линий и устройства различного назначения: шнуровые комплекты ШК„ приемники набора номера ПНИ; частотные приемопередатчики ЧПП; батарейные передатчики БП, испытательные комплекты, вспомогательные комплекты ВК и другие комплекты, необходимые в процессе установления соединений.
В выходы блоков БАЛ включаются межблочные линии, одна часть которых предназначена для соединения с блоками БСЛ при установлении внешних соединений, а другая — для установления внутристанционных соединений в пределах одного блока БАЛ или между этими блоками В эти линии включаются шнуровые комплекты ШК. Включение ШК в блоки БАЛ уменьшает нагрузку на блоки БСЛ, что позволяет сократить количество этих блоков при большой внутристанционной нагрузке. Однако при таком включении образуются небольшие пучки, в которых ШК имеют малое использование. Для увеличения использования ШК некоторые из них включаются в выходы БСЛ для пропуска избыточной внутристанционной нагрузки. В силу этого часть внутристанционных соединений проходит через 8 звеньев (только через блоки БАЛ), а часть — через 16 звеньев (через блоки БАЛ и БСЛ). Входящие и исходящие внешние соединения устанавливаются через
8 звеньев (через блоки БАЛ и БСЛ). На ATC предусматриваются также транзитные соединения, которые устанавливаются через 8 звеньев блоков БСЛ.
Блок абонентских линий построен из блоков концентрации (звенья А и В) и блоков смешивания (звенья С и О). На рис. 15.2 представлен блок концентрации с параметрами 64X32X16 с концентрацией 4:1. На звене А использованы два однозвенных не полнодоступных блока 32Х16 с доступностью 4, а на звене В —; четыре полнодоступных блока 8Х4. Связность в блоке концентрации f — 4. Такой блок рассчитан на удельную абонентскую нагрузку 0,1 Эрл. Для включения абонентских линий с большой удельной нагрузкой (0,12 — 0,2 Эрл) используется блок с концентрацией 2: 1 и с параметрами 32Х32Х16 -(рис. 15.3). На звене

используются восемь блоков 4Х4, а на звене В — четыре блока 8Х4 при связности f» — — 1.
Блок смешивания имеет параметры 64Х64Х64 и состоит из восьми блоков 8Х8 на звене С и 8 блоков 8Х8 на звене О, связность fee — — 1 (см. рис. 10.8а).
На основе блоков концентрации и смешивания выполняется блок БАЛ на требуемую емкость. На рис. 154 приведена схема блока БАЛ на 4096 входов и 1024 выходов. Для построения такого блока требуется 64 блока концентрации (4096:64=64) и 16 блоков смешивания (1024:64=16). Следовательно, параметры блока будут 4096X2048X1024X 1024. Между каждым входом и выходом БАЛ имеется один соединительный путь. Число блоков БАЛ зависит от емкости АТС. Так, при наличии двух блоков БАЛ на ATC можно включить 8192 абонентских линий, при трех — 12288 и т. д.

Блоки соединительных линий БСЛ комплектуются только из блоков смешивания с параметрами 64Х64Х64 как на звеньях А и В, так и на звеньях С и О. На рис. 15.5 показана схема БСЛ на 1024 входа и 1024 выхода. Для построения блока требуется
16 блоков смешивания на звеньях А и В и 16 на звеньях CD. Между входом и выходом соединение может быть установлено по любому из четырех соединительных путей. Все блоки БАЛ и БСЛ связаны между собой по принципу «каждый с каждым», соединение между блоками осуществляется на промежуточном щите.
Структура управляющего устройства
Управление установлением соединения осуществляет электронная управляющая машина ЭУМ. Для обеспечения требуемой надежности используются две машины, образующие двухмашинный комплекс. На рис. 15.6 представлена структурная схема КЭАТС, на которой показаны основные функциональные блоки ПУУ и ЭУМ. В состав ПУУ входят: определитель абонентских линяй! OAJ блок включения коммутационных элементов БВКЭ; определитель входов (комплектов) ОВ; определитель отбоя центральный импульсный распределитель ЦИР, предназначенный для распределения сигналов по блокам ПУУ, согласующие устройства СУ.
Управляющий комплекс работает по записанной программе. Каждая из двух электронных управляющих машин ЭУМ содержит: центральный процессор; периферийный процессор ITl7p; оперативное запоминающее устройство ОЗУ; постоянное (долго- временное) запоминающее устройство ПЗУ; две группы каналов (устройств)' ввода-вывода КВВ1 и КВВ2; устройства управления комплексом УУК и внешние устройства ВУ.
Центральный процессор предназначен для арифметической и логической обработки в реальном масштабе времени ин формации о вызовах, поступающей из периферийного процессора, мультиплексного канала МК или непосредственно из периферийных управляющих устройств при отсутствии периферийного процессора. Центральный процессор взаимодействует с оперативным и постоянным запоминающими устройствами как при выполнении команд программы, так и.при обмене информацией между памятью ЭУМ и внешними устройствами.
Управление работой всех устройств комплекса производится автоматически по командам управляющей программы, выполняемой центральным процессором. Последний выполняет 120 команд, формат которых занимает 32 разряда. В составе команд наряду
с обычными командами, используемыми в ЭВМ общего назначения, имеются команды, специфические для процессов телефонной коммутации.
Центральный процессор имеет систему прерываний, которая позволяет вести обработку информации в реальном масштабе- времени, и канал (устройство) прямого управления, предназначенный для организации двухмашинной работы управляющего комплекса, обнаружения ошибок и диагностики. Быстродействие составляет 250 тыс. операций в секунду при выполнении. команд типа «сложение» в формате сумматор — память.
Периферийный процессор предназначен для согласования временных режимов ПУУ с ЭУМ и снижения необходимого быстродействия. Периферийный процессор выполняет операции ввода информации из ПУУ в ЭУМ, вывода информации из памяти ЭУМ в ПУУ и предварительной логической обработки, вводимой из ПУУ информации. Для управления операциями ввода-вывода информации из ПУУ периферийный процессор использует команды ЦПр «Начать ввод-вывод», «Остановить ввод-вывод», «Опросить канал», «Опросить ввод-вывод», так как связь между ЦПр и ППр организована аналогично связи между ЦПр и каналами (устройствами) ввода-вывода. В некоторых случаях ППр в ЭУМ не устанавливают.
Оперативное запоминающее устройство ОЗУ предназначено для временного хранения информации о состоянии объектов коммутационной системы и программ. В качестве ОЗУ используется устройство емкостью 65536 слов (64 кбайт). Каждое слово состоит из 32 информационных и четырех контрольных разрядов (битов). Оперативное запоминающее устройство состоит из двух блоков памяти емкостью по 32 К и построено на ферридовых: кольцевых сердечниках диаметром 0,6 мм. Время цикла ОЗУ - 1,25 мс, время выборки — 0,75 мс.
Постоянное запоминающее устройство ПЗУ предназначено для долговременного. хранения программ. Емкость ПЗУ 12812- 36-разрядных слов состоит не более чем из 8 блоков (модулей), время цикла обращения — 1,25 мс, время выборки — 0,75 мс.
Каналы (устройства) ввода-вывода КВВ обеспечивают связь ППУ и разнотипных внешних устройств с процессорами и ОЗУ. Наличие ABB устраняет необходимость непосредственной связи между процессорами и устройствами управления внешними устройствами и позволяет осуществить выполнение основной программы параллельно с выполнением операций ввода-вывода.
Обмен данными между процессорами и внешними устройства
ми производится через систему шин. Для операций ввода-вывода l КВВ использует серию собственных команд. При этом структура 1 и набор команд, управляющие сигналы и информационные слова, принимаемые для управления любыми внешними устройствами, не зависят от типа последних. Обмен информацией между ОЗУ и внешними устройствами ВУ может производиться в двух режимах: групповым и мультиплексным.
В групповом режиме выбираемое ВУ использует все средства управления, имеющиеся в КВВ, и остается в логической связи с: —: этим устройством, пока не завершится передача всего массива данных или управляющей информации. Работающие в этом режиме КВВ называют селекторными (СК) и обеспечивают последовательную работу 256 внешних устройств.
В мультиплексном режиме КВВ может обслуживать одновременно несколько выполняющих операции ввода-вывода.
В этом режиме выполнение операций ввода-вывода разделяется: на короткие интервалы времени, в каждом из которых между КВВ и ВУ передается только фрагмент данных определенной длины. Средства KBB, необходимые для выполнения определенной операции ввода-вывода, связанные с одним ВУ, называются под каналом. Каналы, работающие в данном режиме, называются мультиплекснылш (МК) и обеспечивают работу 256 ВУ, Мультиплексные каналы могут работать и в монопольном режиме: последовательно с каждым из 256 ВУ. В квазиэлектронной АТС рассматриваемого типа используются два селекторных канала СК, работающие с максимальной скоростью передачи информации 800 кбайт/с, и один мультиплексный канал МК с общей пропуск- ной способностью 40 кбайт/с. При работе этого канала в монопольном режиме его максимальная пропускная способность 360 кбайт. Устройство управления комплексом УУК предназначено для коммутации цепей, по которым передаются управляющие сигналы между ЦПр, ППр и КВВ; хранения информации о структуре и состоянии управляющего комплекса, режимах работы ЭУМ и р контроля за информацией, поступающей от ЦПр, ППр и КВВ.
Внешние устройства ВУ управляющего комплекса состоят из накопителей на магнитном барабане НМБ с устройствами управления УУНМБ; накопителей на магнитной ленте НМЛ с устройствами управления УУНМЛ; телетайпа с устройствами управления УУТ; устройства передачи данных УПД; комплекса общего канала сигнализации ОКС при передаче данных. Устройства управления внешними устройствами (УВУ) преобразуют стандартный набор информационных и управляющих слов к виду, обеспечивающему управление работой конкретного внешнего устройства.
Общий канал сигнализации ОКС предназначен для передачи сигналов управления и контроля между квазиэлектронными АТС, УИВС и подстанциями. Формат каждого сообщения содержит, данные о виде сигнала, номерах направления, номере той линии, которой принадлежит сигнал. В состав оборудования OAС сxoдят: устройство передачи сигналов УПС; устройство передачи сигналов низкого уровня УПС — НУ, устройство зашиты от ошибок УЗО. Скорость передачи информации 2400 бит/с.
Все блоки и устройства управляющего комплекса дублированы для обеспечения требуемой надежности.
Управляющий комплекс имеет программное обеспечение ПО,— которое содержит систему телефонных программ, операционную систему и внешнее программное обеспечение. Система телефон- ных программ содержит программы ввода-вывода, программы обслуживания вызовов и управляющие программы. Программы ввода-вывода обеспечивают опрос всех источников вызовов и постановку всех заявок на обслуживание. Программа вывода обеспечивает передачу команд в ПУУ. Управляющие программы осуществляют все действия по приему и передаче информации, необходимой в процессе установления соединения, а также все операции- по установлению соединений. Операционная система осуществляет контроль и диагностику всего оборудования АТС, включая программное обеспечение, а также ввод-вывод с различных ВУ а возможность общения оператора с ЭУМ. Внешнее программное обеспечение содержит средства автоматизации программирования, систему логического моделирования и отладки. В системе квазиэлектронных АТС предусматриваются широкое использование подстанций, управление установлением соединений на которых осуществляется управляющим устройством опорной станции. На подстанции (рис. 15.7) устанавливаются упрощенные управляющие устройства, которые взаимодействуют УУ опорной АТС через ОКС. Управляющее устройство полстанции состоит из периферийных управляющих устройств УУ, включающих в себя определитель абонентских линий ОАЛ и блоки включения коммутационных элементов БВКС, и управляющего, устройства подстанции УУПС. Кроме того, на подстанции имеется устройство управления внешними устройствами и аппаратурой передачи данных УВУ. Аппаратура передачи данных АПД со.
стоит из устройства защиты от ошибок УЗО и устройства преобразования сигналов низкого уровня УПС — НУ, связанного с общим каналом сигнализации ОКС. Информация о состоянии всех устройств подстанции хранится в ЗУ управляющего комплекса опорной АТС. На основании этой информации на опорной АТС определяются все координаты соединительного тракта на ПС и через ОКС выдаются в УУПС и далее в УУ подстанции,
Абонентам подстанции представляются такие же возможности при установлении соединений, как и абонентам опорной АТС.
Максимальная емкость подстанции составляет 2048 абонент. ских линий. Емкость может наращиваться блоками по 256 абонентских линий. При максимальной емкости подстанции количество соединительных линий к опорной ATC составляет 512. В опорную АТС максимально может быть включено пять подстанций, емкостью каждая до 2048 номеров, Все блоки управления на под. станции и ОКС — дублированы.
На сетях большой емкости, оборудованных КЭАТС предполагается организация узлов исходящего а входящего сообщений УИВС, предназначенных для транзитных соединений между АТС. Узел строится из блоков входящих линий БВЛ и блоков исходящих линий БИЛ. Блоки могут иметь четырехпроводную или двух проводную коммутацию разговорного тракта. На рис. 15.8 показана структурная схема УИВС. Принцип построения ПУУ и управляющего комплекса узла аналогичен УУ опорной ATC.

Процессы установления соединения
Внутристанционные соединения. Определение в ы з о в а. Снятие вызывающим абонентом микротелефонной рубки отмечается в соответствующем абонентском комплекте А7( и в определителе абонентских линий 0АЛ, который периодически опрашивается со стороны в соответствии с программой. Запрос на установление соединения анализируется программой, в соответствии с которой определяются категория вызывающего абонента, тип его ТА (дисковый или кнопочный) и производится поиск соответствующего приемника набора номере ПНН (см. рис. 15.6). Затем определяется свободный соединительный путь от АК до ПНН. Для включения коммутационных элементов в точках коммутации выбранного соединительного пути необходимо сформировать команды на проверку и включение и передать в соответствующий БВК9 периферийного управляющего устройства. В результате выполнения этих команд устанавливается соединение между АК и ПНН (рис. 15.9а), из которого абоненту посылается сигнал «Ответ станции». Абонент приступает к набору номера, который принимается и фиксируется в ПНН. В соответствии с программой приема и анализа цифр номера в ОЗУ подсчитываются импульсы набора, записывается и анализируется по- ступающая цифровая информация. Если в результате анализа выясняется, что соединение внутристанционное, то выбирается свободный соединительный путь между вызывающей и вызываемой абонентскими линиями. В этой же программе предусмотрен поиск свободного ШК. Далее выбираются свободный комплект посылки вызова ф(7В) и комплект посылки вызывающему абоненту зуммерного сигнала «Контроль посылки вызова> (КПЗ), определяются свободные соединительные пути для подключения этих комплектов к абонентским линиям. Затем формируется команда на включение коммутационных элементов в точках коммутации, образующих эти пути, после чего вызываемому абоненту посылается сигнал «Посылка вызова», а вызывающему — «Контроль посылки вызова». Во время посылки этих сигналов соединительный путь АбА — ШК — АбБ не замкнут, однако информация о нем хранится в ОЗУ (рис. 15.9б).
После получения от вызываемого абонента сигнала ответа, который воспринимается в комплекте КПВ, формируются команды на подключение ШК к абонентским линиям и образование разговорного тракта. При этом соединительные пути АбА — КПЗ я АбБ — КПВ размыкаются, а комплекты освобождаются (рис. 15.9в). Питание микрофонов ТА абонентов осуществляет ШК, который контролирует состояние АЛ и воспринимает сигнал отбоя.
И с х о д я щ е е с о е д и н е н и е. При установлении исходящего соединения первый этап — подключение линии абонента к ПНН и набор номера осуществляются аналогично выше описанному. В результате анализа набранного номера определяются направление к другой станции и ее код, а также выбирается свободный комплект исходящей соединительной линии ИКСЛ в выбранном направлении. Далее отыскивается свободный соединительный путь между линией вызывающего абонента и выбранным ИКСЛ. Координаты объектов выбранного соединительного пути записываются в ОЗУ. Далее отыскивается соответствующий коду станции частотный (ЧПП) или батарейный передатчик и устанавливается соединительный путь между выбранным передатчиком и ИКСЛ (рис. 15.10а). После этого на встречную станцию передается

цифровая и управляющая информация по исходящей линии под управлением программы передачи цифровой информации и сигналов управления. После передачи всех сигналов на встречную станцию и приема сигнала «Ответ абонента» размыкаются соединительные пути: АбА — ПНН, HKCJT — передатчик и замыкается соединительный путь АбА — ИКСЛ (координаты которого хранились в ОЗУ), благодаря чему устанавливается разговорное состояние (рис. 15.106). Состояние линий вызывающего и вызываемого абонентов контролируется в ИКСЛ.
В х о д я щ е е с о е д и н е н и е. Сигнал входящего вызова с другой АТС воспринимается в комплекты входящей соединительной линии ВКСЛ, которые периодически опрашиваются в соответствии с программой опроса. В результате анализа принятого сигнала определяется тип АТС, с которой получен сигнал занятии. Если это АТС координатного типа, то выбирается свободный частотный приемник ЧПП и устанавливается соединительный путь ВКСЛ — ЧПП (рис. 15.11а). В случае поступления сигнала занятия от АТСДШ такой путь устанавливать не надо, так как цифры набора номера принимаются непосредственно в ВКСЛ. После приема всех сигналов, необходимых для установления соединения, программа обработки вызова анализирует их. Если установлено, что соединение направлено к абоненту данной опорной АТС, то необходимо определить номер вызываемого абонента и место его включения в БАЛ. Затем выбирается свободный соединительный путь между линией вызываемого абонента и ВКСЛ и координаты этого пути записываются в ОЗУ. После этого выбираются свободные комплекты КПЗ бодных соединительных путей абонента и КПВ и между ВКСЛ сигналов в ТА абонентов и КПВ, проверяется наличие между линей вызываемого
абонент ответит, что отмечается в КПВ, соединительные пути абонентская линия — КПВ и ВКСЛ — КПЗ, а также комплекты КПВ и КПЗ освобождаются. После этого выбирается соедини. тельный путь между линией вызываемого абонента и ВКСЛ (рис. 15.1.1в) и устанавливается разговорное состояние. Состояние линий абонентов контролируется в ВКСЛ.
Т р а н з и т н о е с о е д и н е н и е. В процессе установления соединения ВКСЛ периодически опрашивается. Как только будет обнаружен сигнал занятия по входящей линии, образуется соединительный путь В.КСЛ — приемник (рис. 15.12а). Приемник производит прием цифровой информации. Затем эта т в ОЗУ ЭУМ: В соответствии с принятой информацией определяются направление и свободный ИКСЛ в этом направлении, а также соединительный путь от ВКСЛ к ИКСЛ, координаты которого запоминаются в ОЗУ. Затем устанавливается соединительный путь от передатчика к ИКСЛ. После передачи информации образуется соединительный путь между ВКСЛ и ИКСЛ. На АТС состояние линий, между которыми установлено соединение, контролируется ШК при внутристанционных соединениях и комплектами соединительных линий при исходящих, входящих и транзитных соединениях. Для того чтобы выявить сигнал отбоя, поступивший от одного из разговорных абонентов, в УУ устанавливается специальный определитель сигналов отбоя (Oping) (см. рис. 15.6) . Этот определитель периодически опрашивает ШК, ВКСЛ и ИКСЛ. При появлении сигнала отбоя в одном из комплектов определяет номер этого комплекта и выдает в центральный процессор запрос на выполнение программы отбоя. Назначение этой программы состоит в том, чтобы отметить в ЗУ ЭУМ свободными те объекты коммутационной системы, которые были заняты в данном соединении.
Контроль ва состоянием оборудования
Квазиэлектронные АТС работают в реальном масштабе времени и не могут иметь перерыва в своей работе. Поэтому к надежности оборудования АТС предъявляются жесткие требования. Интенсивность отказов, приводящих к прекращению хотя бы одного из видов связи для одного источника нагрузки, должна врыть 10-4 — 10- отк/ч, а суммарное время простоя для всех источников нагрузки должно быть не более двух часов в течение срока службы.
Такие высокие требования по надежности и полная централизация управления требуют быстрой локализации отказавших при- боров. Поэтому в состав программного обеспечения входят контрольные программы, обеспечивающие выключение поврежденных приборов .на время устранения повреждения, и диагностические программы, которые способствуют сокращению времени обнаружения повреждений и своевременному выяснению неисправного оборудования.
Система контроля и диагностики оборудования КЭАТС представляет собой совокупность программных и аппаратурных средств, обеспечивающих своевременное обнаружение неисправностей, блокировку и выключение неисправного оборудования, определение места и характера повреждения. Предусматривается оперативный и тестовый контроль. Оперативный контроль предусматривается двух видов: оперативный аппаратный контроль правильности работы оборудования и оперативный контроль выполнения управляющих программ. Аппаратный контроль проверяет состояние оборудования непрерывно в течение всего времени функционирования, обнаруживает неисправность в момент ее возникновения, осуществляет диагностический доступ .к неисправным устройствам. Оперативный контроль выполнении управляющих программ в процессе установления соединения заключается в использовании программных и логических методов контроля. Программный контроль основан на контроле длительности выполнения отдельных операций и предупреждения «зацикливания»: программ. Логический контроль заложен в самих управляющих программах и предусматривает выполнение определенных условий.
Тестовый контроль осуществляется в отдельные промежутки времени, задаваемые программой временного расписания, заявкой оператора или программой оперативного контроля. Тестовый контроль позволяет обнаружить неисправности, которые не выявлены средствами оперативного контроля, определить место повреждения, локализовать место неисправности, восстановить работоспособность оборудования, проверить контролируемое оборудование. Результаты диагностики выдаются обслуживающему персоналу в виде записи на ленте для устранения неисправностей. Ремонт оборудования, как правило, производится путем замены неисправного типового элемента замены (ТЭЗ). После каждой замены по заявке оператора выполняется тест, определяющий правильность функционирования устройства и указывающий на место неисправности, если она не устранена.
В осуществлении функций управления и технического обслуживания участвует система программного обеспечения. Программа технического обслуживания записывается в ЗУ (накопитель) на магнитном барабане, эти данные переносятся в ОЗУ по мере необходимости. Основной функцией технического обслуживания является контроль состояния оборудования АТС. При выполнении программы технического обслуживания данные о состоянии различных устройств АТС печатаются телетайпом и выдаются по мере поступления запросов от обслуживающего персонала.
ГЛАВА 17 ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ АТС
17.1. ОСНОВНАЯ ЗАДАЧА ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИЙ
Система технической эксплуатации АТС складывается из следующих компонентов: аппаратурных или программных средств контроля и проверки исправности оборудования; устройств и методов обнаружения и устранения неисправностей, возникающих в приборах и, программах АТС; организационных мероприятий, определяющих методы и способы технического обслуживания.
Основной задачей системы эксплуатации является обеспечение нормального функционирования всех устройств телефонной сети при наименьших затратах труда, денежных средств, материалов и оборудования. Выполнение противоречивых требований о высоком качестве работы АТС и низком уровне эксплуатационных расходов достигается только путем решения ряда сложных научных и инженерных задач. Выбор системы эксплуатации не может быть произвольным, он обусловлен многими объективными факторами. Наибольшее влияние на систему эксплуатации оказывают технические характеристики обслуживаемой системы АТС и, в первую очередь, ее надежность.
На современном этапе основными направлениями усовершенствования систем эксплуатации АТС являются: максимальная автоматизация всех процессов обслуживания АТС с использованием программных средств диагностики повреждений;
централизованное обслуживание нескольких АТС персоналом находящимся в эксплуатационно-техническом центре; использование математически обоснованных методов эксплуатации и дифференцированных для каждой АТС показателей качества ее работы; внедрение на телефонных сетях автоматизированных систем управления (АСУ).
17.2. УСТРОЙСТВА СИГНАЛИЗАЦИИ АТС
Для обеспечения выявления характера и места повреждения на АТС используется система оптической и акустической сигнализации. Различают аварийную сигнализацию, которая требует немедленного вмешательства обслуживающего персонала для быстрейшего устранения повреждения, и неаварийную, которая отмечает повреждения, не влияющие в данный момент на работоспособность всей станции. Некоторые неаварийные сигналы возникают только после определенной выдержки времени Т (это предотвращает появление ложных сигналов).
На каждом стативе АТС размещаются плата сигнализации, которая фиксирует различные сигналы о повреждениях приборов данного статива, и комплект разноцветных сигнальных ламп для проявления этих сигналов. Кроме того, на некоторых стативах установлены индивидуальные лампы для сигнализации о повреждении отдельного прибора. Совокупность названных выше устройств называют стативной сигнализацией (табл. 17.1).
Аварийные сигналы сопровождаются непрерывным звонком громкого боя (H3), неаварийные — прерывистым звонком (П3).

В системе АТСК сохраняются в основном теже виды сигнализации, но некоторые из них приобретают другой смысл. Так, техническая сигнализация отмечает неоднократное неустановление соединения маркером. Абонентская сигнализация появляется после выдержки 5 — 11 мин в ИШК (при длительном неответе вызываемого абонента), в ВШК (при безотбойности вызванного абонента), а также на стативе АК (при безотбойности вызывавшего абонента). Используются также дополнительные виды сигнализации — о неисправности или безотбойности комплектов РСЛ, о повреждении цепей вызывного тока.
На необслуживаемых координатных АТС предусмотрена возможность автоматической передачи сигналов о повреждениях через свободную соединительную линию на вышестоящую станцию. С этой целью, например, на сельских оконечных и узловых АТС устанавливается передающий сигнальный комплект СК, а на UC приемный комплект СКЦ. Данные, принимаемые СКЦ, печатаются (в кодированной форме) на рулоне бумаги при помощи в электроуправляемой пишущей машинки.
Квазиэлектронные и другие перспективные АТС не требуют вмешательства обслуживающего персонала при каждом повреждении. На таких АТС используется аварийная сигнализация о вы ходе из строя важнейших приборов или об отсутствии исправных резервных функциональных блоков. Сигнализация должна возникать также в том случае, когда число накапливающихся повреждений превзойдет установленный допустимый уровень. При использовании устройств и программ автоматической диагностики повреждений сигнализация указывает блок или плату, в которых обнаружена неисправность.
17.3. КОНТРОЛЬНО-ИСПЫТАТЕЛЬНАЯ АППАРАТУРА
На АТС всех систем используется специальная аппаратура для проверки исправности оборудования и выявления повреждений. Ручные испытательные приборы требуют больших затрат труда и времени при проверках, поэтому они постепенно вытесняются высокоэффективной автоматической аппаратурой.
На декадно шаговых АТС ручная проверка приборов на рабочих местах выполняется при помощи универсального передвижного проверочного прибора № 21, прибора № 31 (для проверки состояния выходов ступеней искания) и прибора № 32 (для проверки ЛИМ). Кроме того, в регулировочной мастерской имеются настольные испытательные пульты для проверок съемных плат различных приборов. Автоматическая проверочная аппаратура (АПА) АТС-54 [30] размещена на специальном стативе и связана со всеми стативами ГИ и ЛИ через подключающие устройства, которые состоят из искателей-распределителей HP ШИ-50/4, находящихся на стативе АПА, и проверочно-подключающих искателей ППИ ШИ-25/8, установленных на. каждом стативе ГИ и ГH. При помощи ИР статив АПА соединяется с любым из 350 проверяемых стативов, а при помощи ППИ — с одним из приборов данного статива. По программе, задаваемой нажатием кнопок, измерятельно-испытательное устройство АПА подключается к входу проверяемого прибора и к проверочному выходу статива (таким вы- ходом обычно служат 10-й выход 9-й декады ГИ и 99-й выход ЛИ). В каждом цикле работы АПА имитирует все этапы установления соединения, проверяя наличие акустических сигналов, исправность разговорных проводов, действие пробных и импульсных цепей через искусственные линии и т. д. Предусмотрена возможность выборочной однократной или многократной проверки отдельных приборов либо сплошной поочередной проверки оборудования. В последнем случае задается только номер статива, с которого должна начаться проверка, а все дальнейшие переходы к различным приборам и стативам совершаются автоматически. Для проверки оборудования 10-тысячной станции по полной программе требуется 12 — 14 ч. Печатающее -устройство АПА (перфораторного или цифропечатающего типа) фиксирует все неправильные действия проверяемых приборов, отмечая номер прибора и статива, а также шифр повреждения. По некоторым данным использование АПА позволяет снизить число непрохождений в 2,5 раза и сократить штат АТС. С помощью АПА выявляется только 30% повреждений, однако эти повреждения являются самыми сложными.
На городских координатных АТС имеется комплекс передвижных пультов для ручных и полуавтоматических проверок маркеров (прибор ППМ), регистров (ППР), шнуровых и линейных комплектов (ПШК и ПРСЛ). Правильность взаимодействия приборов всей станции проверяется с помощью статива автоабонента (в АТСК-У) или автотренера (в АТСК). К этому стативу подводятся от разных абонентских сотен испытательные выходы, между которыми автоматически поочередно устанавливаются исходящие и входящие контрольные соединения. Автоабонента может действовать непрерывно, регистрируя число установленных и неустановленных соединений, либо останавливаться в случае непрохождения соединения и включать, сигнализацию. В первом режиме автоабонент обычно работает в ночное время, во втором— днем. Кроме того, на ЛГСК-У используется передвижной прибор для имитации пяти одновременных вызовов (ПОВ). Случаи неустановления соединений маркерами выявляются устройством автоматического контроля (УАК) с кодированной записью на руло не бумаги данных о номерах приборов, участвовавших в неустановленном соединении, номерах абонентов, этапе работы маркера и т. п. В АТСК-У фиксируется также номер регистра, не закончившего процесс соединения. Систематический анализ записей УАК служит основой для выявления повреждений. Локализация повреждений облегчается при использовании устройства оперативного контроля (УОК), которое включает сигнализацию, если в течение определенного интервала времени число соединений, неустановленных отдельным маркером или регистром, превысит допустимый уровень. Имеется также аппаратура для контроля и про. верки регистров (АКПР), которая в случайной последовательности подключается к различным регистрам и контролирует правильность их работы в процессе обслуживания абонентской на грузки. Кроме того, АКПР может работать в режиме поочередного занятия регистров и их автоматической однократной или многократной проверки.
Важным элементом системы эксплуатации является оборудование учета нагрузки (УН), которое позволяет получить статистические данные о количестве обслуженных и потерянных вызовов, а также о нагрузке отдельных пучков приборов. На АТАК используется статив УН, на котором установлены устройства измерения времени занятия приборов и электромеханические счетчики для регистрации числа занятий и неустановленных соединений. Контролируемые приборы подключаются к стативу УН при помощи кнопочных переключателей и реле. Для АТАК-У разработана электронная аппаратура УН, размещаемая на двух стативах. Вся поступающая в аппаратуру информация накапливается на электронных счетчиках и каждые 15 мин переписывается на перфоленту для обработки на ЭВМ.
Правильное использование комплекса автоматической контрольно-испытательной аппаратуры позволяет выявлять с ее помощью 40 — 50% повреждений на станциях АТАК.
В квазиэлектронных и электронных АТС непосредственное (визуальное) наблюдение за работой приборов невозможно, поэтому обычные методы контроля непригодны. В этих АТС используют комплекс разнообразных способов контроля, который согласован с программой работы станции. Рассмотрим кратко эти способы: 1) постоянное закрепление контролирующих устройств за наиболее ответственными приборами станции, например общими блоками управления. Такие встроенные устройства сравнительно несложны, они постоянно контролируют работу прибора во время обслуживания поступающей от абонентов нагрузки; 2) использование специальных тест-программ, при помощи которых периодически проверяются различные приборы в процессе установления обычных соединений; 3) применение более сложных тест-программ, создающих искусственную нагрузку (контрольные вызовы) в периоды, когда мала абонентская нагрузка; 4) использование полуавтоматической или автоматической проверочной и диагностической аппаратуры, которая дистанционно управляется оператором эксплуатационного центра, связанного с множеством необслуживаемых АТС.
Управление этой аппаратурой может осуществляться и без участия человека, с помощью программы, записанной в ЭВМ .эксплуатационного центра. Наилучший результат дает сочетание различных способов контроля. Использование встроенного контроля и простейших тест-программ позволяет включать аварийную сигнализацию при полном отказе контролируемого устройства или накапливать статистические данные о количестве сбоев. Поврежденное устройство может автоматически заменяться резервным. Если количество сбоев превысит допустимый уровень, то вызывается более сложная диагностическая подпрограмма, которая выясняет место повреждения до уровня съемной платы. Иногда эта задача решается с помощью дистанционно управляемой аппаратуры. Оператор эксплуатационного центра (или «проверяющая программа) может выдать команду, по которой неисправное устройство блокируется от занятий и тем самым предотвращается его влияние на качество работы станции. Таким образом, различные способы контроля решают разные задачи, взаимно дополняя друг друга.
В современных крупных квазиэлектронных АТС используется мощный комплекс диагностических программ, который является неотъемлемой частью единого программного обеспечения станции. В этих АТС все процессы управления коммутацией, контроля оборудования, диагностики повреждений, включения резервных блоков и сигнализации осуществляются единым управляющим комплексом с большим объемом памяти. При этом для обнаружения сравнительно несложных, но часто встречающихся повреждений применяют самые простые диагностические программы. Если использование такой программы не привело к успеху, то вызываются все более и более сложные программы до тех пор, пока повреждение не будет обнаружено. Такой принцип позволяет часто использовать простые программы и редко — сложные.
К настоящему времени сложились два основных метода эксплуатации — профилактический и статистический.
Профилактический .метод эксплуатации заключается в том, что все приборы АТС систематически проверяются, причем периодичность проверок для каждого вида приборов различна и определена заранее. Этот метод предполагает выполнение следующих работ в автозале АТС.
1. Текущее обслуживание складывается из постоянного (на декадно-щаговых АТС — круглосуточного) наблюдения за сигнализацией; выявления причин появления сигналов о неисправностях; устранения повреждений (по данным сигнализации и контрольно-испытательной аппаратуры, заявкам бюро ремонта и других станций); регистрации всех повреждений в журнале учета; обеспечения чистоты и оптимального температурно-влажностного режима в автозале. Эти работы выполняются дежурным персоналом смены в основном в дневное время. На необслуживаемых, например, сельских и учрежденческих координатных АТС текущее обслуживание отсутствует.
2. Планово-профилактические проверки и измерения проводятся с целью выявления неисправностей и нарушений регулировки в отдельных приборах станции. При таких проверках в соответствие с технологической картой, составленной для каждого вида приборов, выполняется ряд определенных операций: внешний осмотр; полная или частичная электрическая проверка действия прибора в обычных либо утяжеленных условиях; измерения некоторых параметров; чистка, а при необходимости также регулировка и замена отдельных деталей. При проверках используется ручная или автоматическая контрольно-испытательная аппаратура КИА. Периодичность проверок разных приборов определяется годовым планом профилактики (чем больше повреждаются приборы, тем чаще они проверяются). На обслуживаемых АТС плановая профилактика проводится в часы малой нагрузки силами сменного персонала, проверяющего за крепленную за ним часть оборудования. Простейшие повреждения немедленно устраняются этим персоналом, а сложные передаются регулировочной бригаде. На необслуживаемых АТС и подстанциях профилактика проводится электромеханиками, которые пери одически посещают закрепленные за ними объекты.
3. Текущий (планово-предупредительный) ремонт всех приборов проводится по плану силами регулировочной бригады. Ремонт заключается в снятии съемных приборов, чистке приборов и мест их установки, разборке и сборке механизмов с заменой изношен ных деталей, механической. регулировкой и смазкой трущихся частей. Отремонтированный прибор тщательно проверяется на пульте, а затем — на рабочем месте. Периодичность текущего ремонта зависит от интенсивности работы прибора. Искатель ДШИ-100, например, ремонтируется один раз в три года, если количество его занятий в сутки не превышает 100, и один раз в год — при 300 или более занятиях.
4. Капитальный ремонт проводится при сильном износе оборудования (на декадно-шаговых АТС через каждые 8 — 10лет) силами имеющейся на сети ремонтной бригады. При таком ремонте полностью заменяют изношенные приборы или отдельные их узлы, а также некоторые монтажные кабели, выполняют сплошную регулировку всех видов оборудования.
5. Учет и-контроль технического состояния АТС производятся путем внешнего осмотра оборудования, выборочной проверки отдельных приборов и контроля прохождения соединений при внутренней и межстанционной связи. На крупных ГТС имеются специальные группы контроля, которые систематически проверяют со
стояние станций. Для этого вручную или автоматически создают определенное количество контрольных вызовов к испытательным номерам и регистрируют несостоявшиеся соединения по техническим причинам. Качество работы станции должно проверяться в часы большой нагрузки. Необходимое количество контрольных вызовов определяется методами математической статистики [23]. Контрольные группы производят также приемку всех видов профилактических и ремонтных работ, оценивают работу регулировочных бригад, контролируют выполнение различных производственных показателей и разрабатывают рекомендации по их улучшение.
Профилактический метод эксплуатации обладает рядом серьез. ных- недостатков. Профилактические проверки всегда охватывают лишь небольшую часть оборудования и поэтому не позволяют вы. являть все имеющиеся повреждения. Некоторые повреждения, влияющие на качество работы станции, обнаруживаются с большим запозданием, а редкие отказы (сбои) вообще не выявляются. При хорошем качестве оборудования количество повреждений мало и несопоставимо с трудом, затраченным на их обнаружение, т. е. большая часть проверок оказывается бесполезной. Текущий ремонт всех приборов (как хорошо работающих, так и имеющих недостатки) часто приносит больше вреда, чем пользы. Иногда после проведения профилактических проверок и ремонтов число повреждений возрастает. Это может объясняться низкой квалификацией или случайными ошибками регулировщиков, нарушением «притирки» механических деталей, некачественно проведенной чисткой контактов. Текущий ремонт требует снятия части приборов, поэтому ухудшается качество обслуживания абонентов. Ос» ионным недостатком профилактического метода является то, что он требует неоправданно больших затрат труда и, следовательно, больших эксплуатационных расходов. Особенно возрастают эти расходы, если стремятся улучшить показатели при уже достигнутом высоком уровне качества. По некоторым рекомендациям доля неустановленных соединений должна находиться в определенных пределах, например 0,25 — 0,5%. Дальнейшее улучшение качества явно нецелесообразно, так как оно не будет ощутимо для абонентов и вместе с тем потребует значительных расходов. Согласно расчетам для уменьшения доли ошибок с 0,03 до 0,02% нулино затратить в 3 раза больше средств, чем для снижения этой доли с 2 до 1%.
Статистический метод эксплуатации лишен указанных выше недостатков. При использовании этого метода текущий ремонт и профилактические проверки не проводятся. Периодически проверяются лишь немногие наиболее важные общестанционные приборы, а также устройства контроля и сигнализации; в необходимых случаях выполняется смазка механизмов. Статистический метод допускает наличие некоторого, относительно не большого, количества неаварийных повреждений, которые не влияют заметно на качество обслуживания абонентов. Немедленное устранение всех замеченных повреждений не является обязательным, основные усилия обслуживающего персонала направлены только на поддержание приемлемого качества работы станционного оборудования. Решение этой задачи достигается последовательным выполнением ряда мероприятий.
1. Организуют непрерывный сбор информации о качестве работы отдельных устройств, пучков приборов, линий и станции в ц е лом. В настоящее время не существует единого, научно обоснован ного критерия, при помощи которого можно было бы оценить работу АТС. Поэтому используют многочисленные показатели качества обслуживания и нормативы. Основными показателями для коммутационного, оборудования являются: количество повреждений в единицу времени на .единицу оборудования (например, среднемесячное-число повреждений, приходящееся на 100 номеров задействованной емкости ATC); средняя продолжительность одного повреждения; доля повреждений, устраненных в течение нормированного так называемого контрольного срока; долнеустанов ленных соединений по отношению к общему числу поступивших вызовов (этот показатель оценивает отказы из-за повреждений приборов). Кроме того, используются такие дополнительные показатели, как количество заявок, поступивших в бюро ремонта АТС, число повторных повреждений и т. д. Показатели качества должны быть различными для разных станций и зависеть от системы ATC, поступающей нагрузки, числа ступеней искания и длительности эксплуатации (число повреждений особенно велико в пер. вые месяцы после пуска АТС, а при сроке эксплуатации свыше 25 лет оно возрастает на 12 — 25%).
При использовании статистического метода эксплуатации для получения информации о качестве работы оборудования применяют: АПА на декадно-шаговых АТС; автотренеры, УАК, УОК, АКПР, дефектографы, устройства учета нагрузки на координат. ных; встроенные электронные счетчики неустановленных соединений, аппаратуру и программы автоматического контроля на квази- электронных АТС с замонтированной программой; запоминающее устройство, накапливающее данные о повреждениях, на АТС с за. писанной программой. Устройства вывода информации и табло сигнализации желательно сосредоточить в одном пункте, находящемся вне автозала. Основным, обобщающим, критерием качества является доля неустановленных соединений, поэтому необходимо ежедневно производить такое количество контрольных вызовов, которое достаточно для достоверной оценки качества. Определить это количество можно в зависимости от полученных результатов проверок, используя специальные математические методы, напри. мер метод последовательного анализа [51]. Контрольные вызовы должны совершаться как в ЧНН, так и в периоды малой нагрузки.
2. Полученную информацию о состоянии оборудования тщательно анализируют с целью выработки достоверных гипотез о причинах возникающих повреждений. Обработка больших массивов поступающей информации, накопление необходимых статистических данных и их детальный анализ должны выполняться в максимально сжатые сроки, иначе принимаемые решения окажутся запоздалыми и, следовательно, малоэффективными. Ускорение обработки информации достигается использованием ЭВМ в эксплуатационном центре, который обслуживает все близлежащие ATC. Полученные в результате анализа показатели качества сравнивают с нормативными величинами, которые были определены ранее для каждой станции в условиях ее нормальной стабильной работы.
3. На основе проведенного анализа принимают решение о действиях, необходимых для поддержания допустимого качества, и а случае необходимости проводят работу по отысканию и устранению неисправностей в определенной части оборудования, продолжая при этом непрерывно контролировать показатели качества.
Эффективное применение статистического метода эксплуатации возможно только при наличии ряда объективных предпосылок: 1) оборудование ATC должно быть достаточно надежным (чтобы не потребовалось постоянное обслуживание); 2) средний уровень повреждаемости в нормальных условиях эксплуатации должен быть достаточно низким; 3) на АТС должны иметься эффективные автоматические средства контроля технического состояния оборудования; 4) необходим систематический сбор и анализ': статистических данных о повреждаемости оборудования с использованием современных средств вычислительной техники; 5) должна быть достигнута высокая общая «культура обслуживания», инженерно-технический персонал должен быть достаточно квалифицированным (чтобы принимаемые решения были правильными); 6) должны использоваться научно обоснованные нормативы качества работы оборудования. Перечисленным требованиям в значительной мере удовлетворяют современные координатные системы- АТС, поэтому статистический метод успешно внедряется на ряде телефонных сетей страны [11]. В еще большей степени отвечают условиям применения статистического метода перспективные системы АТС с программным управлением, обладающие мощным комплексом средств контроля и диагностики. В этих АТС имеется возможность полной. автоматизации всех процессов анализ статистических данных и определения оптимальной стратегии про верки оборудования.
17.5. ЦЕНТРАЛИЗАЦИЯ ОБСЛУЖИВАНИЯ ATC
Традиционный способ автономного обслуживания предполагает 4 наличие постоянного штата инженеров и электромехаников на каждой станции. Использование. координатной коммутационной- техники и статистического метода эксплуатации создало возможность внедрения на передовых ГТС и СТС страны прогрессивного- способа централизованного обслуживания [11]. Согласно этому — способу для группы близко расположенных АТС организуется, центр технического обслуживания {LITO), укомплектованный одной несколькими выездными бригадами, а также квалифицированными инженерами, которые координируют выполнение всех работ по обслуживанию данной группы АТС. За каждой станцией постоянно закрепляется лишь минимально необходимый персонал, который в часы наибольшей нагрузки проводит текущее обслуживание по показаниям сигнализации, УАК и автотренера, устраняет абонентско-станционные повреждения, а также выполняет все необходимые работы по указаниям ЦТО. При авариях или ухудшении качества работы оборудования ЦТО высылает: на АТС выездную бригаду, которая оказывает помощь персоналу станции или действует самостоятельно, проводя необходимые инженерно-технические мероприятия по выявлению и устранению недостатков в работе станции. Кроме того, персонал ЦТО с помощью средств дистанционного, контроля ведет наблюдение за работой оборудования всех АТС в то время, когда на них нет обслуживающего персонала.
На некоторых сетях организуется служба технического абонентов (СТОА), объединяющая работников, занятых устранением абонентских повреждений (обычно в пределах одного узлового района). Основными элементами СТОА являются централизованное бюро ремонта (ЦБР), операторы которого принимают все абонентские заявки о повреждениях; группа учета и анализа поступающих заявок, которая координирует работу СТОА и обменивается информацией с UTO; линейные участки, объединяющие монтеров по эксплуатации абонентских устройств; группа диспетчеров, которая контролирует работу монтеров по устранению повреждений и имеет прямые связи со всеми линейны- ми участками и автозалами; мастерская по ремонту телефонных аппаратов. Служба технического обслуживания абонентов оснащается специальным коммутационным и проверочным оборудованием.
Использование способов централизованного обслуживания позволяет резко повысить производительность труда предприятий связи и значительно улучшить качество обслуживания абонентов. Особенно велик эффект централизации при использовании АТС с программным управлением. Наличие на этих-АТС развитого комплекса диагностических программ позволяет сосредоточить в едином эксплуатационно-техническом центре весь обслуживающий персонал, наблюдающий за большой группой станций. Для работы непосредственно на АТС используются менее квалифицированные работники, которые к тому же посещают станции изредка — только для замены поврежденных съемных плат. По некоторым данным (15| до 98% повреждений удается обнаружить на ЦТО без выезда на АТС, из них в 70% случаев выявляется непосредственно поврежденная плата. Никаких ремонтов на АТС не производится, неисправности в съемных платах устраняются в мастерской ЦТО, оборудованной специальной диагностической аппаратурой. Такой способ обслуживания позволяет значительно снизить затраты тру. да. Таким образом наиболее сложные системы АТС с управлением по записанной программе оказываются самыми экономичными в эксплуатации.