РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ И КОМПЛЕКСЫ
10.1. Классификация и
тактико-технические характеристики радионавигационных систем
Классификация и тактико-технические
характеристики РНС основаны на общих принципах, изложенных в гл.1 применительно
к любым РТС. Напомним их и конкретизируем непосредственно для РНС.
Радионавигационные системы
классифицируются по следующим признакам:
·
метод определения
местоположения объекта (угломерные, дальномерные,
·
разностно-дальномерные
и комбинированные);
·
вид несущего информацию
и измеряемого системой параметра радиосигнала (амплитудные, временные,
частотные и фазовые);
·
диапазон радиоволн
(от декакилометровых, применяемых в сверхдлинноволновые системах, до
оптических, используемых в лазерных системах местоопределения);
·
дальность действия
систем (глобальные, дальней и ближней навигации);
·
место расположения
опорных станций (системы наземного и космического базирования).
Тактическими называются
характеристики системы, определяющие ее функциональные возможности при
практическом применении.
К основным тактическим
характеристикам РНС относятся:
·
зона действия или
рабочая зона системы;
·
время поиска
сигналов в заданном секторе рабочей зоны;
·
пропускная
способность;
·
определяемые
параметры сигналов, их число и точность измерения;
·
разрешающая
способность;
·
помехозащищенность;
·
надежность.
Поскольку эти параметры
используются для оценки качества функционирования различных систем, следует
дать их общие определения, которые в дальнейшем могут быть уточнены
применительно к конкретным типам РНС.
Зоной действия называется область
пространства, в которой система надежно выполняет функции, соответствующие ее
назначению. Границы зоны действия характеризуются допустимыми погрешностями
местоопределения объекта при заданном уровне помех. Почти всегда одним из
параметров, определяющих рабочую зону, является дальность действия системы.
Чаще всего максимальная дальность действия системы зависит от допустимой
погрешности при измерении координат и параметров движения объектов.
Временем поиска сигналов называется
время, необходимое для обнаружения сигнала в заданном секторе зоны действия
системы.
Число измеряемых координат, так же
как и точность их измерения, определяет возможности системы при ее
практическом использовании.
Точность системы характеризуется
погрешностями при измерении координат и параметров движения объекта.
Пропускная способность
характеризуется числом объектов, обслуживаемых системой одновременно или в
единицу времени.
Пропускная способность зависит от
принципа действия системы и ряда ее тактических и технических параметров, в
частности рабочей зоны, точности и разрешающей способности. Так, РНС, в которых
используется одна линия связи (разностно-дальномерные или угломерные
радиомаячного типа), обладают неограниченной пропускной способностью, так как
могут одновременно обслуживать любое число объектов.
Пропускная способность дальномерных
систем, основанных на принципе запроса и активного ответа (две линии связи),
ограничена ответчиком, в котором для формирования ответного сигнала на каждый
запрос необходимо некоторое время. В этом случае пропускную способность
характеризуют вероятностью обслуживания заданного числа объектов при заданном
периоде повторения запросов каждым из объектов, находящихся в рабочей зоне
системы.
Разрешающая способность
определяется возможностью разделения сигнала, несущего полезную информацию, с
паразитными сигналами (отражения от ионосферы, местных предметов и т. п.),
подобными по форме полезному, но достоверной информации об определяемых
координатах не содержащими.
Помехозащищенность РНС —
способность надежного выполнения заданных функций в условиях действия
непреднамеренных и организованных помех. Помехозащищенность определяется скрытностью
работы системы и ее помехоустойчивостью. Под скрытностью системы понимают
трудность обнаружения ее работы и измерения основных параметров излучаемого
радиосигнала, а следовательно, и создания специально организованных помех.
Количественной оценкой
помехоустойчивости является отношение мощностей сигнала и помехи в полосе
пропускания приемника, при котором погрешность измерения заданного параметра
не превосходит допустимой с требуемой вероятностью.
Надежность — свойство объекта
сохранять во времени в установленных пределах значения параметров,
характеризующих способность выполнения требуемых функций в заданных режимах и
условиях применения, хранения и транспортировки.
К основным техническим
характеристикам РНС относятся параметры, непосредственно определяющие ее
тактические характеристики:
·
метод поиска
сигналов и измерения координат и параметров движения объекта;
·
рабочие частоты,
стабильность, мощность, вид модуляции, ширина спектра излучаемых колебаний;
·
форма, размеры,
коэффициент направленности антенны;
·
чувствительность и
полоса пропускания приемного устройства;
·
вид и параметры
устройств отображения и съема информации;
·
габариты и масса
устройств, составляющих систему, потребляемая ими энергия от источников
питания.
В дальнейшем взаимосвязь
тактических и технических характеристик будет рассмотрена для конкретных типов
РНС.
10.2. Точность определения
местоположения позиционным методом
Местоположение объекта позиционным
методом определяется как точка пересечения по крайней мере двух линий положения
различных семейств. Погрешность определения линий положения приводит к
погрешности нахождения координат объекта. Если 
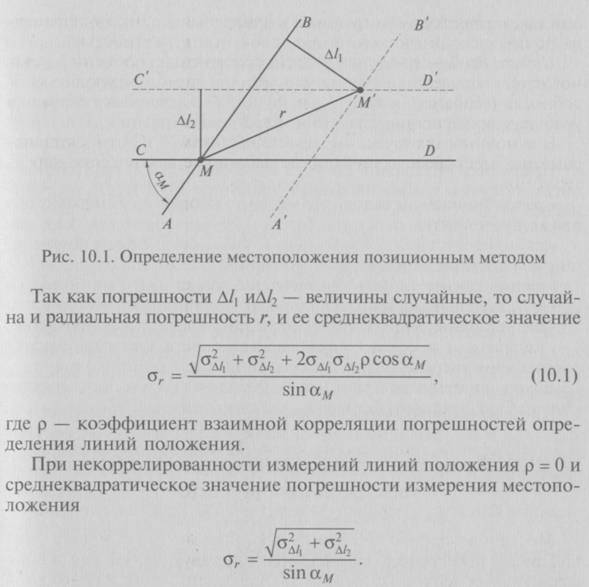
Таким образом, точность определения
местоположения растет при уменьшении погрешностей определения линий положения и
приближении угла пересечения линий положения  Часто при навигационных расчетах приближенная
оценка погрешностей местоопределения на основе среднеквадратического значения
радиальной погрешности является недостаточной. Более полной статистической
характеристикой радиальной погрешности является вероятность того, что
расчетное значение местоположения объекта находится в определенной области,
окружающей его истинное местоположение.
Часто при навигационных расчетах приближенная
оценка погрешностей местоопределения на основе среднеквадратического значения
радиальной погрешности является недостаточной. Более полной статистической
характеристикой радиальной погрешности является вероятность того, что
расчетное значение местоположения объекта находится в определенной области,
окружающей его истинное местоположение.
Рассмотрим частный случай, когда
случайные погрешности 
 взаимонезависимы и подчиняются
распределению Гаусса. Тогда их П В имеют вид
взаимонезависимы и подчиняются
распределению Гаусса. Тогда их П В имеют вид
10.3. Требования, предъявляемые к
навигационной аппаратуре
Требования, предъявляемые к
навигационной аппаратуре, целесообразно рассмотреть на примере навигационного
обеспечения авиации, поскольку при этом используются практически все методы и
средства управления движением воздушных судов (ВС) в околоземном пространстве в
самых различных условиях полетов.
Возрастание интенсивности
воздушного движения и ужесточение норм безопасности полетов ставят перед
разработчиками радионавигационного оборудования самолетов разнообразные требования.
Общими, не зависящими от
конкретного типа и целевого назначения ВС, являются следующие требования:
·
пригодность
технических средств навигационного обеспечения для всех типов ВС во всем
диапазоне их летно-технических характеристик;
·
решение совместно с
другими системами минимально необходимого перечня задач, включающего
определение места ВС (с передачей этой информации потребителям), пройденного
пути, обеспечение непрерывного траекторного управления и ручного или
автоматического пилотирования;
·
непрерывность
навигационного обеспечения, характеризуемая надежностью и работоспособностью
систем независимо от времени, погодных условий, подстилающей поверхности,
геофизических особенностей района полета;
·
глобальность
навигационного обеспечения, характеризуемая способностью оборудования
обеспечивать полеты ВС в любом районе земли;
·
наличие на борту ВС
систем автономного счисления координат и времени;
·
удобство
непосредственного восприятия экипажем информации системы индикации, в том
числе автоматических предупреждений о случайных отказах, повреждениях или
перерывах в работе;
·
контролеспособность
и целостность навигационного оборудования;
·
формирование
указателей на ошибочность информации, которая может быть следствием отказов
оборудования или неправильных действий экипажа, а также обеспечение
максимальной защиты против таких действий экипажа;
·
восстановление
функционирования систем после временной потери работоспособности с обеспечением
указания правильного местоположения ВС без повторного ввода исходных данных;
·
однозначность
выходной информации;
·
способность
технических средств навигационного обеспечения к взаимодействию с системами
УВД, связи и наблюдения;
·
обеспечение всех фаз
полета, включая заход на посадку и посадку ВС;
·
обеспечение плавного
перехода от маршрутного полета к полету в аэродромной зоне и минимального
влияния этого перехода
·
на процессы
индикации и управления, а также на загрузку экипажа;
·
непрерывное
местоопределение с точностью, позволяющей ВС находиться в заданных коридорах и
эшелонах, а экипажу точно выполнять требуемые процедуры и маневры;
·
электромагнитная
совместимость навигационных средств с другим оборудованием, установленным на
борту ВС и на Земле;
·
способность
выполнять упрощенным составом оборудования минимальный набор функций.
Для военных самолетов добавляются
специфические требования:
·
скрытность работы и
максимально возможная автономность;
·
живучесть и
устойчивость по отношению к поражающим факторам;
·
помехозащищенность
по отношению к организованным помехам.
Основными общими тактическими
требованиями являются следующие:
·
размер рабочей зоны;
·
точность определения
местоположения ВС;
·
целостность;
·
непрерывность
обслуживания;
·
готовность.
Требования к размерам рабочей зоны.
Выполнение полетов в условиях воздушного пространства в любой части мира
предопределяет необходимость навигационного обслуживания в любой точке
околоземного пространства, т.е. необходимо обеспечение глобальной рабочей зоны
от уровня земли до больших абсолютных высот. Глобальные навигационные системы
должны функционировать в условиях различной плотности воздушного движения любых
типов ВС, имеющих оборудование различной степени сложности, не вызывая при
этом многотипности и многовариантности наземного и бортового оборудования.
Распределение числа потребителей по
регионам и отдельным районам крайне неравномерно. Большая часть маршрутов
воздушных транспортных средств приходится на регионы наиболее интенсивной
хозяйственно-экономической деятельности стран. Эти обстоятельства
предопределили тенденцию создания локальных и региональных радионавигационных
полей с координацией их формирования и функционирования на государственных и
межгосударственных уровнях.
Благодаря быстрому прогрессу в
разработке концепции требуемых навигационных характеристик, в соответствии с
которой предполагается, что в конечном итоге все воздушное пространство будет
классифицировано, способность ВС выдерживать заданную траекторию вероятнее
всего будет определяться не одной навигационной системой, а комбинацией
систем, функционирующих с использованием бортовой системы управления полетом.
Непосредственное расширение зоны
действия навигационных средств будет главным образом связано с внедрением и
развитием глобальных спутниковых радионавигационных систем. При этом появляется
возможность расширить функциональные возможности локальных радионавигационных
систем за счет точной координатно-временнoй привязки по сигналам СРНС (GPS, ГЛОНАСС и др.).
Требования к точности определения
местоположения ВС. Эти
требования зависят от характера
задач, решаемых потребителями.
Погрешность навигационной системы
характеризует точность определения местоположения ВС относительно заданной
системы координат. Она определяется на выходе навигационной системы и
представляет собой сумму погрешностей компонентов системы.
В зависимости от принципа работы
РТС определение линий положения объектов производится путем измерения времени
запаздывания, амплитуды, фазы или частоты принимаемых электрических сигналов.
Измерение любого из указанных параметров сигнала происходит с ошибкой. Как уже
указывалось ранее, ошибки измерения можно условно классифицировать по причинам
их возникновения.
Инструментальные ошибки. Основной
причиной возникновения инструментальных ошибок являются процессы, протекающие
внутри узлов бортовой и наземной аппаратуры РТС местоопределения (изменение
элементов, параметров и режимов работы схем при изменении окружающей
температуры, влажности, питающих напряжений; старение элементов схемы;
воздействие внутренних шумов и т.д.). В инструментальную ошибку входят также
погрешности измерения, вызванные неточностью и нестабильностью градуировки
шкал и несовершенством систем индикации и отсчета показаний.
Ошибки распространения. Источником
ошибок распространения являются нестабильность условий распространения радиоволн
(скорости распространения, рефракции, затухания в атмосфере) и воздействие на
систему мешающих сигналов, отраженных от местных предметов, земной
поверхности, гидрометеоров и ионосферных слоев. На характер процессов
распространения и отражения радиоволн оказывают влияние состояние солнечной
активности, суточное и годовое вращение Земли, метеорологическая обстановка,
расположение местных предметов в момент излучения и приема сигналов.
Ошибки, обусловленные действием
внешних помех. Характеристики погрешностей измерения, вызванных действием
внешних источников помех, зависят от вида помех, их интенсивности и
расположения источников помех относительно станций системы.
Чрезвычайно большое число
независимо действующих факторов приводит к тому, что оценку точности
местоопределения можно производить только на основе статистических данных,
получаемых в результате большого числа измерений. Возможно также производить
вероятностную оценку точности аналитическим путем, изучая характер воздействия
различных факторов и задаваясь предполагаемыми условиями реальной работы
системы.
Требования воздушных потребителей к
точности определения местоположения ВС в зависимости от решаемых задач и
районов (зон) полета приведены в табл. 10.1. 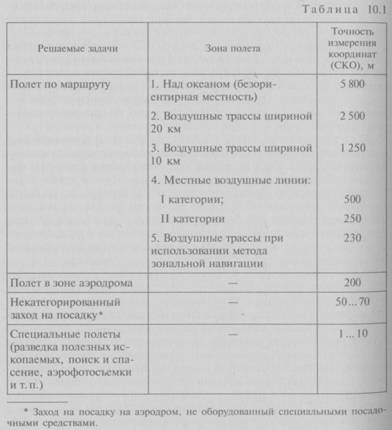
Требования к точности захода на посадку
и посадки определяются эксплуатационными минимумами категорий I, II и III и будут
рассмотрены далее.
Требования к целостности. Они характеризуют необходимую степень
доверия, с которым можно относиться к информации, выдаваемой навигационной
системой. Целостность предусматривает способность системы обнаруживать
отклонение от нормального функционирования и исключать возможность
использования данных в случае, когда рабочие характеристики системы выходят за
допустимые пределы. Избыточная навигационная информация, которая имеется на
борту ВС, может быть использована для проверки целостности навигационной
системы.
Численно целостность системы
оценивается вероятностью оповещения роп потребителя при нарушении работы системы
в пределах допустимого интервала времени Топ. Может также использоваться другой
параметр: значение временной задержки, соответствующей интервалу времени от
момента начала неправильного функционирования системы до того момента, когда об
этом будет сообщено экипажу ВС.
Требования воздушных потребителей к
целостности навигационных систем составляют:
·
для маршрутных
полетов и полетов в зоне аэродрома роп = 0,999 при допустимом времени
предупреждения Tоп =
10 с;
·
для некатегоричного
(неточного) захода на посадку соответственно роп = 0,999 и
Топ = 2 с.
На этапах захода на посадку и
посадки по I, II и III категории ICAO требования к
целостности (роп) для бортового оборудования составляют
соответственно  при допустимом времени оповещения
при допустимом времени оповещения 
Для обеспечения высокой целостности
решаются следующие задачи:
выбор типа, глубины и полноты
встроенного контроля и управления;
использование систем и элементов с
высокой надежностью.
Требования к непрерывности обслуживания. Эти требования характеризуют
способность навигационной системы выполнять свои функции без прерывания режима
работы при выполнении планируемой операции. Риск, связанный с непрерывностью
обслуживания, представляет собой вероятность того, что нормальный режим
работы навигационной системы будет прерван и система не представит необходимую
информацию при выполнении заданной операции. Непрерывность обслуживания системы
задается в виде значения риска, увязанного с продолжительностью участка планируемой
операции.
Требования к готовности. Они определяют способность навигационной
системы выполнять свою функцию в момент начала планируемой операции. Связанный
с готовностью риск представляет собой вероятность того, что определение
местоположения ВС или его наведение не будет обеспечиваться в указанный момент.
Готовность системы задается в виде показателя готовности в момент начала
выполнения планируемой операции и, как правило, имеет значение для различных
систем от 0,99 до 0,999.
10.4. Системы дальней радионавигации
наземного базирования
Наиболее широкое распространение
получили фазовые радионавигационные (ФРНС) и импульсно-фазовые радионавигационные
системы (ИФРНС). В простейших ФРНС многозначность фазовых измерений устраняется
путем непрерывного подсчета целого числа полных фазовых циклов в показаниях
фазометра при перемещении потребителя от точки с известными координатами.
Однако этот метод ненадежен, так как даже кратковременный сбой в синхронизаторе
бортового измерителя приводит к потере фазовых соотношений.
Наибольшее распространение получил
многошкальный метод устранения многозначности. Для его реализации нужно, чтобы
сигналы излучались на нескольких частотах, находящихся между собой в
определенном численном соотношении.
Используют также метод устранения
многозначности, основанный на привлечении информации о функции, модулирующей несущее
колебание по амплитуде. Необходимым условием при этом является поддержание
строгого синхронизма между модулирующей функцией и фазой несущего колебания.
Так, в ИФРНС применяют метод
устранения многозначности, основанный на измерении РНП по огибающим сигнальных
радиоимпульсов, форма которых близка к колоколообразной, а несущее колебание
жестко синхронизовано с некоторой характерной точкой огибающей. Классическим
примером многочастотных ФРНС являются сверхдлинноволновые (СДВ) системы, работающие
в диапазоне очень низких частот (10... 15 кГц). Особенностью радиоволн этого
диапазона является слабая зависимость затухания напряженности поля от
расстояния. Например, действующая в настоящее время СДВ ФРНС «Омега» при
наличии восьми опорных РМ обеспечивает надежное местоопределение потребителей
практически в любом районе земного шара.
В СДВ ФРНС опорные РМ излучают
последовательно во времени основную и дополнительные частоты. Дополнительные
частоты предназначены для реализации многошкального метода устранения
многозначности. Для определения РНП, как правило, используют основную частоту,
но не исключается возможность повышения точности местоопределения за счет
привлечения к фазовым измерениям сигналов дополнительных частот. В рассматриваемых
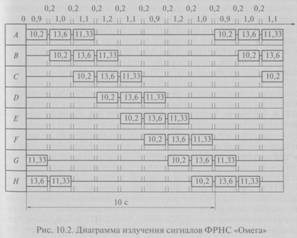
многочастотных ФРНС осуществляют частотно-временное разделение сигналов.
Диаграмма излучения сигналов ФРНС «Омега» представлена на рис. 10.2. Наземные
опорные РМ синхронизованно излучают импульсные радиосигналы большой длительности
(0,9... 1,2 с) на частотах 10,2; 13,6; 11,33 кГц. Период излучаемых сигналов
10 с. Сигналы частотой 10,2 кГц применяют для формирования шкалы высокой
точности. Для создания грубой шкалы используются биения колебаний на частотах
13,6 и 10,2 кГц, а для сверхгрубой — биения на частотах 11,33 и 10,2 кГц.
Предполагается, что с точностью до сверхгрубой шкалы местоположение потребителя
априори известно.
Как и в других РНС без ответчика,
выбор типа измерений для решения радионавигационной задачи в значительной мере
определяется стабильностью бортового эталона частоты и точностью априорных
сведений о сдвиге временной шкалы потребителя относительно шкалы опорных РМ.
Применение дальномерных измерений оправдано лишь в тех случаях, когда сдвиг
отсутствует или заранее известен. При невыполнении этого условия используются
квазидальномерные или разностно-дальномерные измерения, которые дают
одинаковые погрешности местоопределения
 потребителя при полной априорной неопределенности о сдвиге
временных шкал.
потребителя при полной априорной неопределенности о сдвиге
временных шкал.
Наибольший вклад в погрешность
местоопределения в СДВ ФРНС вносит изменчивость фазовой скорости
распространения радиоволн на трассе радиомаяк—потребитель. Погрешность,
обусловленная изменчивостью условий распространения радиоволн, может быть
представлена как функция регулярной и случайной составляющих фазового сдвига.
Регулярная составляющая фазового сдвига зависит от времени года и суток, типа
подстилающей поверхности и т.п. Она рассчитывается для различных районов
земного шара и должна учитываться при радионавигационных измерениях. Случайная
составляющая, если не осуществляются специальные меры (дифференциальный режим,
комплексирование), полностью входит в результирующую погрешность
местоопределения. Поэтому точность СДВ ФРНС невелика: среднеквадратическая
погрешность местоопределения достигает нескольких километров. Несмотря на
низкую точность СДВ ФРНС находят широкое применение, так как обладают
практически глобальной зоной действия, неограниченной пропускной способностью и
сравнительно невысокой стоимостью бортового оборудования потребителей.
Устранение многозначности измерений
в СДВ ФРНС «Омега» заключается в установлении целого числа циклов в фазовом
сдвиге, который и определяет оценку РНП. При этом отдают предпочтение
разностно-дальномерному методу, что экономически выгодно, так как не требует
размещения на борту потребителя
 . Последовательное уточнение результатов отсчета РНП от
шкалы к шкале позволяет получить однозначный отсчет по точной шкале.
. Последовательное уточнение результатов отсчета РНП от
шкалы к шкале позволяет получить однозначный отсчет по точной шкале.
Применение многоступенчатого
алгоритма дает правильное однозначное решение при условии, что погрешность
сверхгрубой шкалы не выходит за пределы грубой шкалы, а погрешность грубой — за
пределы точной шкалы. При воздействии помех это условие может быть нарушено,
что приводит к принятию ошибочного решения. Вероятность такого события зависит
от ряда факторов (уровня помех, коэффициента к и др.) и может быть определена как
Широкое распространение
многоступенчатого алгоритма устранения многозначности в бортовых
приемоиндикаторах ФРНС объясняется простотой его реализации, а также
традициями, которые сформировались на ранних этапах создания ФРНС, когда
применение бортовых ЭВМ было проблематичным. В настоящее время внедрение ЭВМ в
аппаратуру потребителей позволяет перейти от рассмотренного алгоритма к более
сложным, в основу которых положены правила оптимального оценивания, и задача
устранения многозначности решается одновременно с определением координат
потребителя.
Наряду с ФРНС широкое применение
получили импульсно- фазовые радионавигационные системы длинноволнового диапазона
(f0 = 100 кГц), дальность действия которых достигает 1
800...2ООО км. Опорные РМ ИФРНС объединены в группы (цепочки) из 3...6
наземных станций. В каждой цепочке одна из станций является ведущей, остальные
— ведомыми. Для определения координат потребителей используются, как правило,
разностно- дальномерные измерения, хотя не исключается возможность применения
дальномерных и квазидальномерных измерений. Измерение РНП производится
импульсно-фазовым методом: грубое измерение разности дальностей основано на
оценке интервала времени между огибающими импульсов ведущей и ведомых станций,
а точное — на оценке разности фаз несущих колебаний тех же импульсов. Поэтому в
ИФРНС сочетаются положительные качества фазовых и импульсных систем: высокая
точность и однозначность измерений.
Ведущая станция излучает
восьмиимпульсные пачки фазоманипулированных радиоимпульсов. Временной интервал
между импульсами пачки равен 1 000 мкс. Частота повторения пачек (10...25 Гц)
одинакова для всех станций одной цепочки и отличается от частоты повторения
пачек других цепочек, что позволяет в месте приема идентифицировать сигналы
различных цепочек.
Ведомые станции синхронизируются
сигналами ведущей станции и излучают радиоимпульсы такой же формы, но с
некоторой фиксированной задержкой во времени. Введение задержки обеспечивает
временное разделение сигналов ведущей и ведомых станций. Законы фазовой
манипуляции радиоимпульсов ведомых станций и ведущей станции различны, что
позволяет идентифицировать сигналы в месте приема.
В качестве примера на рис. 10.3
представлены временные диаграммы излучения сигналов ведущей и ведомой станций
широко распространенной ИФРНС типа «Лоран-С». Фазы радиоимпульсов, отмеченных
знаками «+» и «-», отличаются друг от друга на 180°. Полный период фазового
кода Тк соответствует двум пачкам радиоимпульсов и равен удвоенному
периоду повторения Тп восьмиимпульсных пачек.
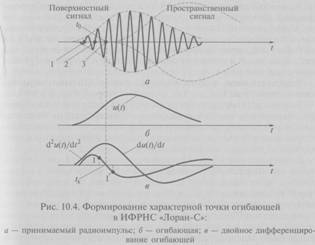
Радиоимпульсы, излучаемые РМ, имеют
медленно нарастающий фронт (рис. 10.4, а), длительность которого близка к 80
мкс. В место приема наряду с поверхностной приходит еще и пространственная
волна, время запаздывания которой зависит от состояния ионосферы и
электропроводности подстилающей поверхности на трассе распространения. Поэтому
на вход приемника поступает не только поверхностный, но и пространственный сигнал,
запаздывающий относительно первого на 35...50 мкс. В режиме точных измерений
пространственный сигнал не может использоваться из-за нестабильности его
параметров, поэтому измерение РНП производится по свободному от влияния
пространственного сигнала участку фронта сигнала поверхностной волны.
Измерению РНП предшествуют поиск
сигнала и грубое измерение (допоиск) временного положения начального участка
фронта сигнала, завершающиеся установкой селекторного импульса следящего
измерителя фазы на начальный участок фронта. Чувствительным элементом
следящего измерителя фазы является дискриминатор, вырабатывающий сигнал ошибки,
пропорциональный сигнальному напряжению в момент появления селекторного
импульса. Селекторный импульс под действием сигнала ошибки занимает одно из
устойчивых положений, соответствующих изменению знака сигнального напряжения
(например, со знака
«-» на знак «+»). Эти положения
обозначены на рис. 10.4, а цифрами 1, 2 и 3. Для исключения многозначности
фазовых измерений РНП необходимо, чтобы селекторные импульсы следящих
измерителей фазы сигналов ведущей и ведомых станций находились 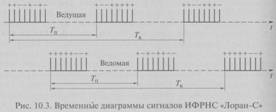
в одинаковых положениях
относительно огибающих, т.е. все они должны занимать одно из трех указанных на
рисунке положений. Для обеспечения наименьшей погрешности фазовых измерений
желательно, чтобы они занимали крайнее правое положение (положение 3 на рис.
10.4, а). Таким образом, устранение многозначности измерения РНП в ИФРНС
сводится к распознаванию нескольких (в нашем примере трех) дискретных положений
огибающей сигнального импульса относительно селекторного импульса следящей
системы и установке последнего в рабочую точку (точка t0 на рис. 10.4, а).
Для исключения влияния
пространственного сигнала на выбор рабочей точки используют различные способы
формирования характерной точки огибающей (рис. 10.4, б). Такой точкой может
быть любая точка на огибающей сигнала, лишь бы ее положение во времени
относительно сигнального импульса оставалось неизменным при изменении
интенсивности сигнала поверхностной волны и не зависело от наличия сигнала
пространственной волны. Например, один из способов формирования характерной
точки основан на двукратном дифференцировании огибающей сигнала. При этом
образуется напряжение, форма которого соответствует второй производной от
огибающей сигнала (рис. 10.4, в). Характерная точка tх определяется моментом изменения знака
второй производной с плюса на минус, что соответствует точке максимальной
крутизны фронта огибающей.
Широкое распространение получили
способы формирования характерной точки, основанные на преобразовании формы
сиг-/ нального радиоимпульса в линейном тракте приемного устройства. При этом
характерная точка огибающей определяется по средством анализа тонкой структуры
сформированного колебания, что позволяет исключить выделение огибающей радиоимпульса
в явном виде.
В качестве примера на рис. 10.5
представлено колебание, сформированное в результате весового суммирования
задержанного на Tо/2 и исходного радиоимпульсов. Временное
положение характерной точки совпадает с моментом прохождения через нуль огибающей
сформированного колебания.
В рассмотренных примерах временное
положение характерной точки оценивается по знакам напряжений, накопленных в сумматорах
выборочных значений. Накапливаемые выборочные значения относятся к точкам 1 и
1' на рис. 10.4 и 10.5. Они образуются в моменты стробирования сформированного
напряжения узкими селекторными импульсами, временное положение которых жестко
связано с селектирующим импульсом следящего за фазой измерителя. При отсутствии
помех временное положение рабочей точки t0 следящего измерителя должно
соответствовать моменту tх, как это показано на рис. 10.4. В этом
случае последовательность знаков накопленных в сумматорах напряжений имеет вид
«+», «-». При сдвиге рабочей точки влево или вправо на Т0 ранний и поздний селекторные импульсы сумматоров также
сместятся влево или вправо на Т0 и последовательность знаков накопленных
напряжений изменится на «+», «+» или на «-», «-». С учетом отмеченной закономерности
производится распознавание ложных положений рабочей точки и осуществляется ее
коррекция относительно
 характерной точки огибающей, чем и завершается устранение
многозначности фазового отсчета по начальному участку фронта сигнального
импульса.
характерной точки огибающей, чем и завершается устранение
многозначности фазового отсчета по начальному участку фронта сигнального
импульса.
После устранения многозначности по
сигналам ведущей и ведомых станций вырабатывается команда на разрешение снятия
отсчетов РНП, считываемых в виде разностей временных положений селекторных
импульсов следящих измерителей. Достоверность отсчетов РНП контролируется при
повторении процедуры накопления выборочных значений. Для этого накопленные
суммы сбрасываются и операция накопления возобновляется. Если повторное
накопление не подтверждает правильности устранения многозначности,
вырабатывается команда на запрет снятия отсчетов и процедура устранения
многозначности возобновляется.
10.5. Системы ближней навигации
Назначение систем ближней
навигации. Системы ближней навигации (СБН) — локальные (региональные) системы,
предназначенные для определения азимута и дальности ВС в пределах прямой
видимости.
Основным назначением СБН является
обеспечение самолетовождения по воздушным трассам, привода ВС к аэродрому
посадки, навигации в районе аэродрома, включая предпосадочное маневрирование.
Основой СБН является сеть
независимых РМ, относительно которых определяются навигационные параметры.
Различают азимутальные (АРМ), дальномерные (ДРМ) и азимутально-дальномерные
(АДРМ) радиомаяки.
Навигационные параметры СБН —
азимут и дальность, которые определяются на борту ВС относительно точки
расположения РМ. При известной высоте полета эти данные однозначно определяют
местоположение ВС в пространстве.
Наибольшее распространение получили
отечественная угломер- нодальномерная радиотехническая СБН, а также
разработанные в США угломерные системы VOR и TACAN и дальномерная система
DME, принципы построения которых приводятся далее.
Принципы построения РСБН. Радиотехническая система ближней
навигации (РСБН) является многофункциональной системой, входящей в состав
комплекса управления воздушным движением и решающей задачи навигации и
посадки.
Система была разработана в конце
1950-х гг. и с тех пор претерпела множество модернизаций.
Используемый диапазон частот
(770... I ООО МГц) предопределяет работу с наземным РМ в пределах прямой
видимости (не более 400 км при высоте полета 10 км). Рабочая зона в стандартном режиме (при использовании угломерно-дальномерного метода
местоопределения) ограничена окружностью с радиусом, определяемым дальностью
действия системы. Возможны также варианты использования системы в режиме
измерения двух и более дальностей (дальномерный метод местоопределения).
В РСБН можно выделить каналы
дальности (КД), азимута (КА) и наземной индикации (КНИ).
Канал дальности работает на основе
импульсных сигналов по принципу «запрос — ответ» и использует диапазон частот
772... 1 000,5 МГц. Информация о дальности заключена в интервале времени между
моментом излучения бортовым передатчиком ВС сигнала запроса дальности (ЗД) и
моментом приема сигнала ответа дальности (ОД), передаваемого наземным ДРМ.
Структурная схема КД представлена на рис. 10.6.
Запросные и ответные сигналы
передаются на разных частотах с использованием различных двухимпульсных кодов,
что позволяет избежать формирования ложных ответных сигналов сигналами ДРМ,
отраженными от местных объектов, уменьшить влияние соседних РМ и повысить
помехоустойчивость КД.
Длительность импульсов ЗД и ОД
составляет 1,5 мкс. Инструментальная точность (СКО) канала дальности
составляет 100 м.
Принцип «запрос —ответ»
обусловливает ограниченную пропускную способность системы: не более 100
работающих с одним РМ самолетов при вероятности ответа не менее 0,8.
Канал азимута использует диапазон
частот 873,6...935,2 МГц. Принцип измерения азимута основан на измерении
временного интервала между моментом прохождения ДН вращающейся антенны маяка
через направление на север и моментом прихода на борт азимутального сигнала,
образующегося за счет облучения объекта направленной антенной маяка.  Для идентификации наземных РМ используется частотно-кодовый
принцип разделения, предполагающий наличие для различных типов аппаратуры от
40 до 176 частотно-кодовых каналов.
Для идентификации наземных РМ используется частотно-кодовый
принцип разделения, предполагающий наличие для различных типов аппаратуры от
40 до 176 частотно-кодовых каналов.
Антенная система АРМ формирует
двухлепестковую диаграмму направленности (ДН1 на рис. 10.7, а), которую можно
аппроксимировать функцией вида
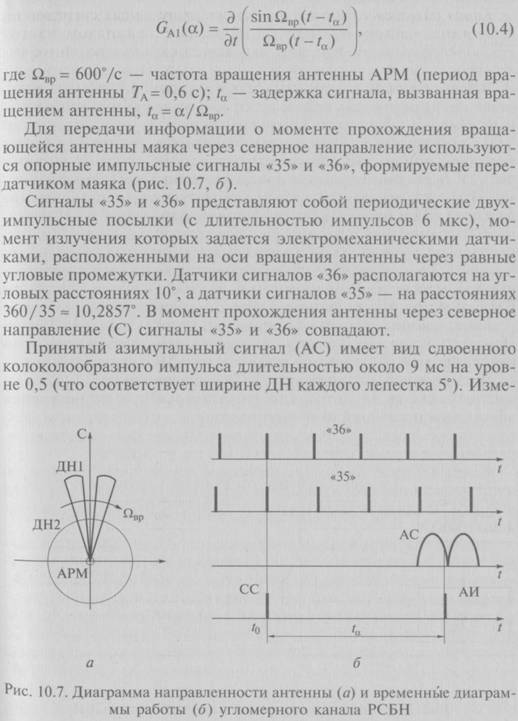
измерительный азимутальный импульс
(АИ) формируется в точке, находящейся на уровне 0,5 на заднем фронте первого
импульса АС. Временной интервал между моментом совпадения «35» и «36»/ и
импульсом АИ отражает в определенном масштабе измеряемое значение азимута.
В исходном варианте и ряде
последующих модификаций РСЬН используется «ненаправленный» режим работы. В этом
режиме опорные сигналы «35» и «36» (а также сигналы ОД) передаются через
всенаправленную антенну (ДН2 на рис. 10.7, а), а во вращающуюся двухлепестковую
ДН1 передается немодулированное колебание.
В более поздних модификациях
аппаратуры РСБН был использован «направленный» режим работы. В этом режиме
азимутальный сигнал, излучаемый через вращающуюся двухлепестковую ДН1,
представляет собой последовательность радиоимпульсов с периодом повторения,
соответствующим углу поворота антенны на 0,25° (четвертьградусное импульсное
заполнение азимутального сигнала). Сигналы ОД, «35» и «36» излучаются с
помощью отдельного облучателя. При этом формируется опорная ДН шириной 21° (на
уровне 0,5), которая сдвинута на такой же угол относительно средней точки
азимутальной ДН вперед по ходу вращения. К преимуществам направленного режима
перед ненаправленным можно отнести увеличение числа каналов за счет более
эффективного использования рабочего диапазона, лучшее согласование ширины
спектра азимутального сигнала и полосы пропускания УПЧ бортового оборудования,
согласование моментов излучения сигналов ЗД с работой азимутального канала
системы и т.д.
Инструментальная точность (СК.О)
канала азимута 0,125°. В реальных условиях переотражений сигналов, наличия
погрешностей юстировки погрешности азимута зачастую вырастают до уровня
одного-двух градусов, что соответствует снижению точности определения
координат на дальности 100 км до 3 000 м.
Канал наземной индикации позволяет
осуществить индикацию местоположения всех самолетов, находящихся в зоне
действия системы, на индикаторах кругового обзора, в том числе и выносных
(ВИКО).
Для обеспечения наземной индикации
передатчик РМ формирует сигналы запроса наземной индикации (ЗНИ). Момент излучения
сигналов ЗНИ задается импульсами, формируемыми с помощью электромеханических
датчиков на оси вращения азимутальной антенны через каждые один или два
угловых градуса. Одновременно те же импульсы запускают радиальную развертку на
И КО РМ и диспетчерском ВИКО. Круговое вращение радиальной развертки
осуществляется синхронно с вращением антенны. В результате в каждый момент
времени направление радиальной развертки на ИКО (ВИКО) отображает направление
облучения пространства азимутальной антенной РМ, а ее начало соответствует
моменту излучения сигнала ЗНИ. Если на данном направлении в зоне действия
системы имеется ВС, то момент его облучения фиксируется на борту приемом
азимутального сигнала и выработкой измерительного азимутального импульса.
Сформированный АИ разрешает прохождение одного сигнала ЗНИ с выхода бортового
приемника на запуск передатчика, излучающего сигналы ответа наземной индикации
(ОНИ), которые принимаются на земле и формируют яркостную отметку на И КО.
Таким образом, на РМ и диспетчерском пункте отображается в полярной системе
координат местоположение всех ВС, находящихся в зоне обслуживания данного
маяка РСБН.
Во всенаправленных РМ (с
непрерывным АС) сигналы ЗНИ излучаются через всенаправленную антенну с периодом
повторения 3,33 мс, что соответствует повороту азимутальной антенны на 2°.
В направленных РМ (с импульсным АС)
ЗНИ излучаются с периодом следования 1,67 мс (через Г поворота антенны).
Сигналы ЗНИ и ОНИ представляют
собой трехимпульсные кодовые группы с длительностью импульсов 1,5 мкс.
Дальномерная система DME. Импульсная дальномерная система DME (Distance Measurement Equipment — оборудование для измерения дальности) рекомендована и
стандартизована Международной организацией гражданской авиации (1САО) в
качестве международной системы для гражданской авиации. Система использует
частотный диапазон 960... 1215 МГц и предназначена для определения на борту ВС
дальности до ДРМ. При использовании нескольких РМ возможно местоопределение ВС
дальномерным методом.
Принципы работы системы DME мало отличаются от принципов работы КД отечественной РСБН.
Используются колоколообразные импульсы, характеризующиеся следующими параметрами:
 задержки сигнала в ретрансляторе
(наземном ДРМ), а также инструментальной погрешностью бортового измерителя.
Второе значение обусловлено нестабильностью скорости распространения
радиоволн, а также инструментальной погрешностью измерителя, зависящей от
дальности.
задержки сигнала в ретрансляторе
(наземном ДРМ), а также инструментальной погрешностью бортового измерителя.
Второе значение обусловлено нестабильностью скорости распространения
радиоволн, а также инструментальной погрешностью измерителя, зависящей от
дальности.
Для повышения точности измерения
дальности был разработан вариант системы DME/P (прецизионная). Данный вариант отличается от «стандартного» DME параметрами используемых импульсов:
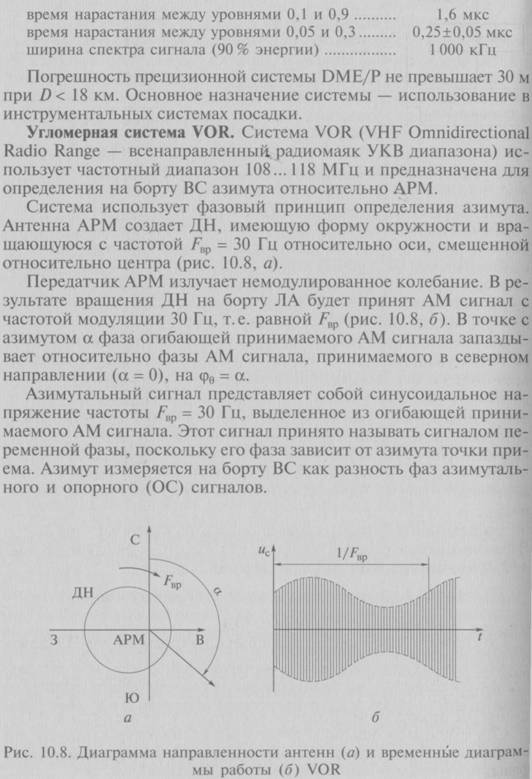
Опорный сигнал, излучаемый АРМ,
формируется следующим образом. Поднесущие колебания частотой  модулируются по частоте сигналом опорной фазы, имеющим
частоту 30 Гц и фазу, жестко связанную с положением ДН и не зависящую от
азимута точки приема. При а = 0 фазы АС и ОС совпадают. Полученное
частотно-модулированное напряжение модулирует по амплитуде колебания несущей
частоты АРМ.
модулируются по частоте сигналом опорной фазы, имеющим
частоту 30 Гц и фазу, жестко связанную с положением ДН и не зависящую от
азимута точки приема. При а = 0 фазы АС и ОС совпадают. Полученное
частотно-модулированное напряжение модулирует по амплитуде колебания несущей
частоты АРМ.
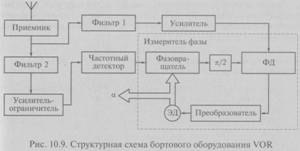
На рис. 10.9 приведена структурная
схема бортового оборудования VOR, используемого в ранних модификациях
системы. На вход приемника поступает смесь двух сигналов, излучаемых АРМ. После
амплитудного детектирования производится разделение сигналов. Фильтр 1
выделяет сигнал переменной фазы частотой 30 Гц, который после усилителя
подается на фазовый детектор, являющийся чувствительным элементом измерителя
фазы. Фильтр 2 настроен на поднесущую частоту fп =
9 960 Гц и выделяет ЧМ колебание опорной фазы. После усилителя-ограничителя,
устраняющего паразитную AM, производится частотное детектирование, в
результате чего выделяется опорный сигнал частоты 30 Гц. В фазовращателе фаза
ОС изменяется на  и далее сдвигается на
и далее сдвигается на  . Фазовый детектор выделяет сигнал ошибки
. Фазовый детектор выделяет сигнал ошибки
 Современные модификации бортовой аппаратуры отличаются от
рассмотренной, главным образом, построением измерителя фазы.
Современные модификации бортовой аппаратуры отличаются от
рассмотренной, главным образом, построением измерителя фазы.
Погрешность (2о) измерения азимута
в стандартном VOR составляет приблизительно 5°. Основной причиной такой
большой погрешности являются искажения фазы AM сигнала на борту ВС, вносимые сигналами АРМ, отраженными от
местных предметов.
Для повышения точности вместо
стандартных АРМ типа VOR используются более
сложные радиомаяки, позволяющие снизить влияние переотраженных сигналов за счет
усреднения на борту ВС быстро изменяющегося паразитного изменения фазы. Эти радиомаяки
называются DVOR — допплеровский VOR. Принцип действия DVOR отличается от стандартного тем, что информация об азимуте
заключена в фазе ЧМ сигнала с центральной частотой
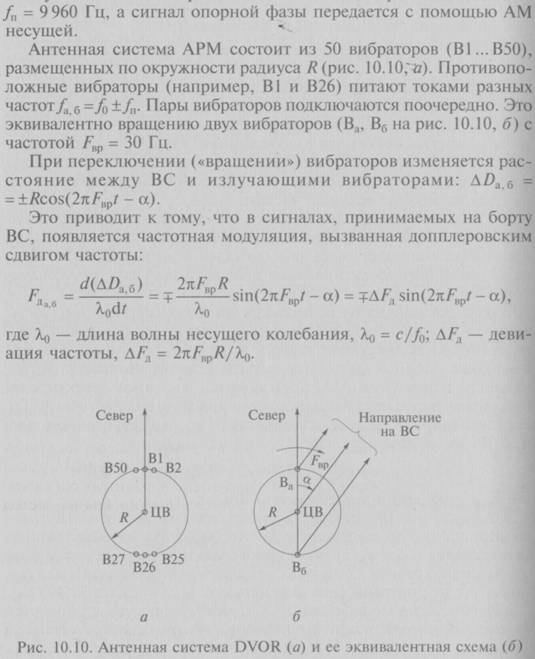

Через центральный вибратор (ЦВ)
излучается AM колебание, частота и фаза огибающей которого жестко связаны
с частотой и фазой «вращения» (переключения) вибраторов.
Результирующий сигнал на борту ВС
полностью идентичен по структуре сигналу стандартного VOR с той разницей, что информация об азимуте заключена в фазе
ЧМ колебания, а сигнал опорной фазы передается с помощью AM. Обработка такого
сигнала может производиться стандартным приемником VOR (см. рис. 10.9). Фильтр 1 при этом выделяет сигнал опорной
фазы, а на частотном детекторе после фильтра 2 выделяется азимутальный сигнал.
При использовании АРМ типа DVOR погрешность определения азимута определяется искажениями
фазы сигнала, модулирующего по частоте поднесущие колебания, а не AM сигнала, как в стандартном VOR. Ошибка, создаваемая
переотражением сигналов от местных предметов, снижается приблизительно в 14
раз. Кроме того, повышению точности измерения способствует увеличение апертуры
антенны. Результирующая погрешность DVOR оказывается на
порядок меньше, чем в стандартном VOR 
Система VOR рекомендована и стандартизована ICAO в качестве международной системы для гражданской авиации и,
как правило, используется в комплексе с дальномерной системой DME.
Система TACAN. Система TACAN (Tactical Air Navigation System — навигационная система для тактической авиации) является
угломерно-дальномерной навигационной системой и используется как гражданскими,
так и военными потребителями.
Дальномерный канал системы аналогичен
системе DME.
Канал азимута был разработан с
учетом опыта эксплуатации системы VOR, но использует частотный диапазон 900... 1
200 МГц для уменьшения габаритных размеров антенны. Измерение азимута, как и в
VOR, основано на фазовом методе: измерение фазы огибающей
принимаемых амплитудно-модулированных сигналов. Существенным отличием TACAN является двухшкальный метод измерения.
Азимутальный радиомаяк TACAN формирует ДН, представляющую собой кардиоиду, на которую
наложено девять дополнительных лепестков с периодом 40° (рис. 10.11, а).
Диаграмма вращается с частотой 15 об/с. В результате этого сигнал, принимаемый
на борту ВС, оказывается
амплитудно-модулированным частотами
15 и 135 Гц (рис. 10.11, б). Фаза огибающей определяется азимутом точки приема.
На частоте 15 Гц зависимость фазы от 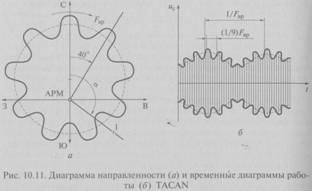 азимута однозначна, а погрешность
определения азимута равна погрешности измерения фазы. Поэтому на частоте 15 Гц
образуется однозначная грубая шкала азимута.
азимута однозначна, а погрешность
определения азимута равна погрешности измерения фазы. Поэтому на частоте 15 Гц
образуется однозначная грубая шкала азимута.
На частоте 135 Гц фаза огибающей
однозначна при изменении азимута в пределах периода дополнительной ДН, т.е.
40°, а погрешность измерения азимута в девять раз меньше, чем погрешность
измерения фазы. Это позволяет сформировать точную шкалу измерения азимута.
Опорные сигналы передаются
импульсами, излучаемыми при прохождении максимумами основной и дополнительной
ДН через восточное направление. На борту ВС опорные сигналы используются для
синхронизации бортовых генераторов частот 15 и 135 Гц.
Бортовое оборудование содержит два
практически идентичных канала грубого и точного измерения азимута, построенных
аналогично измерителю системы VOR.
Система TACAN обеспечивает погрешность измерения азимута  и находит весьма широкое применение благодаря относительно
небольшим габаритным размерам.
и находит весьма широкое применение благодаря относительно
небольшим габаритным размерам.
Некоторые варианты системы TACAN обеспечивают наземное наблюдение воздушной обстановки
(аналогично каналу наземной индикации РСБН).
10.6. Системы посадки самолетов
Назначение, состав и основные типы
систем посадки. Системы посадки
(СП) предназначены для получения на борту ВС и выдачи экипажу и в систему
автоматического управления информации о значении и знаке отклонения от
установленной траектории снижения, а также для определения моментов пролета
характерных точек при заходе на посадку и выполнении посадки.
Посадка самолета является наиболее
сложным и ответственным этапом полета с точки зрения обеспечения безопасности.
Это обусловливает внимание, уделяемое Международной организацией гражданской
авиации (ICAO) стандартизации
аппаратуры СП и предъявляемых к ней требований.
Все системы посадки самолетов
состоят из наземного и бортового оборудования.
Наземное оборудование предназначено
для излучения сигналов, несущих информацию об отклонении точки приема от заданной
траектории снижения в горизонтальной (курсовые РМ — КРМ) и вертикальной
(глиссадные РМ — ГРМ) плоскостях, а также об удаленности точки приема от
расчетной точки приземления (дальномерные РМ — ДРМ) либо о прохождении некоторых
фиксированных точек траектории (маркерные РМ — МРМ).
Бортовое оборудование СП
обеспечивает прием и преобразование сигналов наземных РМ и выдачу
соответствующей информации на индикаторы пилотов и в САУ.
В настоящее время в эксплуатации
находятся системы посадки метрового, дециметрового и сантиметрового диапазонов
волн.
Системы посадки метрового диапазона. Системы посадки метрового диапазона
наиболее широко используются в гражданской авиации.
В качестве международной системы
посадки стандартизована система ILS (Instrument Landing System). Международным стандартам
соответствуют отечественные системы СП-70, -75, -80.
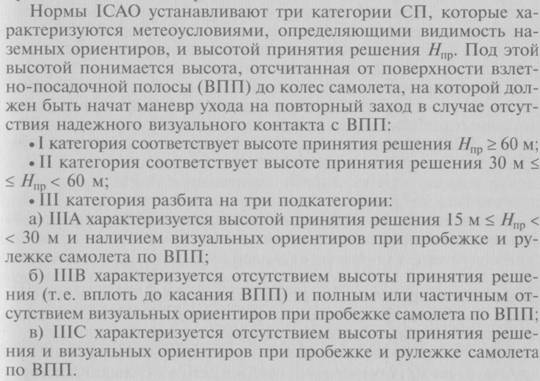
Наземное оборудование системы ILS содержит пять РМ: курсовой (КРМ), глиссадный (ГРМ) и три
маркерных — дальний (ФМРМ), средний (СМРМ), ближний (БМРМ).
На рис. 10.12 показан пример
расположения радиомаяков системы 1LS относительно ВПП.
Заданная траектория захода на
посадку определяется положениями линий курса и глиссады, формируемых антенными
системами курсового и глиссадного радиомаяков.
Информативный параметр сигнала .в
каналах курса и глиссады — разность глубин модуляции радиосигналов.
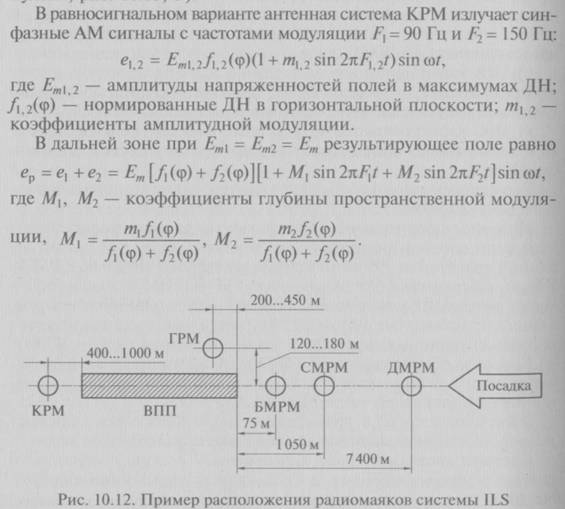
Канал курса использует частотный
диапазон 108... 1 1-2 МГц. КРМ расположен на оси ВПП. Антенная система КРМ
формирует в различных модификациях системы либо две ДН, пересекающиеся на оси
ВПП («равносигнальный» КРМ, рис. 10.13, а), либо две ДН, одна из которых имеет
максимум в направлении оси ВПП, а другая минимум (нуль) в этом направлении (КРМ
с «опорным нулем», рис. 10.13, б).
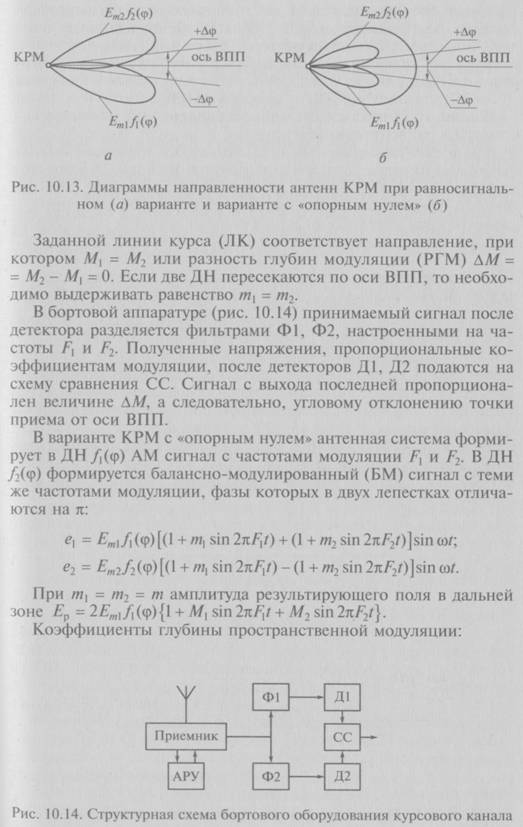
 Для обработки сигналов на борту самолета в обоих вариантах
построения КРМ используется одна и та же аппаратура.
Для обработки сигналов на борту самолета в обоих вариантах
построения КРМ используется одна и та же аппаратура.
Рассмотренные варианты КРМ
используются в системах посадки I категории. Их недостатком является сильное
влияние на положение линии курса сигналов, отраженных от местных предметов.
В системах посадки II и III
категорий используются двухканальные КРМ с «опорным нулем», в которых
формируются основной (узкий) и дополнительный (широкий) каналы. В узком канале
(сплошные линии на рис. 10.15) ширина ДН равна 8... 10°, что в 3 — 4 раза
меньше, чем в одноканальном КРМ. Широкий канал (канал клиренса) имеет
двухлепестковую ДН (пунктир на рис. 10.15), нулевое значение которой совпадает
с линией курса (осью ВПП). Ширина каждого лепестка 30...40°, а их максимумы
ориентированы под углом 15...20° к линии курса.
Более узкая ДН основного канала
способствует снижению влияния переотраженных сигналов. Канал клиренса
(отклонения) служит для указания экипажу направления выхода в зону действия
узкого канала.
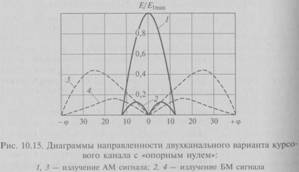 Диаграммы направленности / и 3 соответствуют AM сигналам с частотами модуляции 90 и 150 Гц, а диаграммы 2 и
4 — балансномодулированным (БМ) сигналам с теми же частотами. При этом с одной
стороны от J1K на борту заходящего на посадку самолета по каналу клиренса
принимается сигнал с частотой модуляции 90 Гц, а с другой стороны от Л К с
частотой 150 Гц.
Диаграммы направленности / и 3 соответствуют AM сигналам с частотами модуляции 90 и 150 Гц, а диаграммы 2 и
4 — балансномодулированным (БМ) сигналам с теми же частотами. При этом с одной
стороны от J1K на борту заходящего на посадку самолета по каналу клиренса
принимается сигнал с частотой модуляции 90 Гц, а с другой стороны от Л К с
частотой 150 Гц.
При малых отклонениях от линии
курса сигналы канала клиренса, переотраженные от местных предметов, будут
поступать на вход бортового приемника. Для их подавления сигналы двух каналов
КРМ должны отличаться по частоте (частотный клиренс) или фазе (квадратурный
клиренс).
При частотном клиренсе сигналы
широкого и узкого каналов сдвинуты по несущей частоте на 5... 14 кГц. При
квадратурном клиренсе несущие частоты в двух каналах одинаковы, но сдвинуты по
фазе на 90°.
Зона действия КРМ охватывает сектор
±35° в горизонтальной плоскости и 7° в вертикальной плоскости. Дальность
действия КРМ составляет 46 км в секторе ±10° и 31,5 км в секторе ±35° относительно оси ВПП. Допустимое отклонение по курсу от оси ВПП (для точки
принятия решения) составляет:
 Канал глиссады использует частотный диапазон 328,6... 335,4
МГц. Глиссадные радиомаяки практически полностью аналогичны соответствующим
КРМ. Бортовая аппаратура канала глиссады практически не отличается от бортовой
аппаратуры канала курса.
Канал глиссады использует частотный диапазон 328,6... 335,4
МГц. Глиссадные радиомаяки практически полностью аналогичны соответствующим
КРМ. Бортовая аппаратура канала глиссады практически не отличается от бортовой
аппаратуры канала курса.
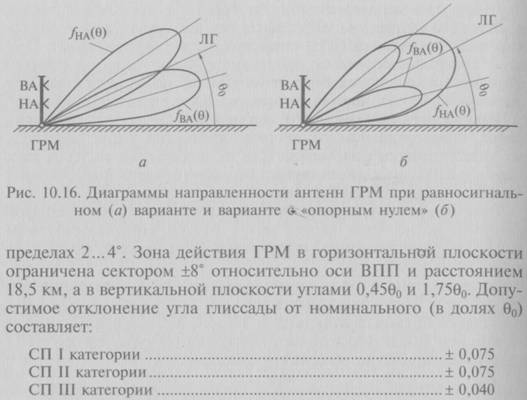
В равносигнальных ГРМ (рис. 10.16,
а) антенная система состоит из двух антенн, ДН которых пересекаются по линии
глиссады (ЛГ). В нижней антенне используется частота модуляции 
В системах посадки II и III
категорий используются двухканальные ГРМ с «опорным нулем». Положение Л Г
задается в основном канале. Диаграмма канала клиренса формируется нижней и
дополнительной верхней антеннами.
При вводе ГРМ в эксплуатацию ЛГ
устанавливают под номинальным углом  . ГРМ должен допускать регулировку угла в
. ГРМ должен допускать регулировку угла в
Маркерный канал работает на частоте
75 МГц и предназначен для фиксации прохождения самолетом определенных точек траектории
снижения.
Антенна МРМ формирует ДН в виде
направленной вверх воронки. Излучаемый сигнал является
амплитудно-модулированным с частотой модуляции 400 (дальний), 1 300 (средний)
или 3 000 Гц (ближний МРМ). Для идентификации МРМ используется дополнительная
манипуляция сигналов последовательностью точек или тире.
В некоторых модификациях СП
используют два маркерных радиомаяка, располагаемые на удалении от начала ВПП 4 км (дальний) и 1 км (ближний).
В бортовом маркерном приемнике
(рис. 10.17) сигнал после детектирования поступает на три фильтра, настроенные
на частоты модуляции сигналов МРМ.
Пройдя через соответствующий
фильтр, сигнал запускает схему световой и звуковой сигнализации. Кроме того,
экипаж самолета имеет возможность прослушивать в телефоне код манипуляции
сигнала МРМ.
Современные модификации СП
метрового диапазона наряду с маркерным каналом используют дальномерную
информацию. Дальномерный маяк-ответчик устанавливается рядом с ГРМ. Система посадки
ILS в этом случае использует дальномерную систему DME/P.
Системы посадки метрового диапазона
имеют ряд недостатков:
·
узкий сектор
относительно единственных линий курса и глиссады, где сохраняется линейная
зависимость сигнала от угла отклонения от этих линий;
·
искривления линий
курса и глиссады из-за влияния рельефа местности и параметров подстилающей
поверхности в зонах, примыкающих к радиомаякам;
·
значительные
габаритные размеры антенных устройств радиомаяков;
·
невозможность
использования глиссады ниже высоты порядка 15 м, что требует выполнения посадки на этапе выравнивания по другим радиосредствам или визуально.
Системы посадки дециметрового диапазона. Наряду с задачами навигации задачу
инструментальной посадки самолетов решает отечественная радиосистема ближней
навигации (РСБН), рассмотренная ранее (см. подразд. 10.5), которая изначально
строилась как многофункциональная система. Одним из необходимых условий при
разработке системы было использование единых бортовых приемных устройств для
целей навигации и посадки, а следовательно, и единый частотный диапазон.
Наземное оборудование дециметровых
систем посадки состоит из курсового и глиссадного радиомаяков и ретранслятора
дальномера — посадочная радиомаячная группа (ПРМГ).
Курсовые и глиссадные радиомаяки
используемых в настоящее время систем ПРМГ являются равносигнальными. Антенная
система формирует ДН в виде двух пересекающихся главных лепестков,
равносигнальная зона которых совпадает с линией курса у КРМ и линией глиссады у
ГРМ. При формировании курсового «правого» и глиссадного «верхнего» лепестков
излучаются сигналы, модулированные по амплитуде сигналом типа меандр с частотой
F1= 1 300 Гц. При формировании курсового «левого» и глиссадного
«нижнего» лепестков излучаются сигналы, модулированные по амплитуде сигналом
типа меандр с частотой F2 = 2 100 Гц. «Правый» («верхний») и «левый» («нижний») лепестки
ДН формируются поочередно с частотой коммутации 12,5 Гц. Длительность сигнала
в каждом лепестке — 35 мс, пауза между ними — 10 мс.

Бортовое оборудование строится по
схеме, применяемой в системах посадки метрового диапазона. Основным
параметром, характеризующим отклонение самолета от линии курса или глиссады,
является коэффициент разнослышимости (КРС)
 Ответные дальномерные сигналы ретранслятора дальномерного
канала системы посадки ПРМГ аналогичны сигналам ретранслятора радиомаяка РСБН,
работающего во всенаправленном режиме.
Ответные дальномерные сигналы ретранслятора дальномерного
канала системы посадки ПРМГ аналогичны сигналам ретранслятора радиомаяка РСБН,
работающего во всенаправленном режиме.
Глиссадный РМ и ретранслятор
дальномерного канала работают на единой несущей частоте дальномерного канала
РСБН. Курсовой РМ работает на частоте азимутального канала РСБН.
Системы посадки дециметрового
диапазона имеют ряд преимуществ по сравнению с СП метрового диапазона:
·
меньшие габаритные
размеры антенных систем и бортовой аппаратуры;
·
большая мобильность
и меньшее время для развертывания.
Вместе с тем, основные недостатки,
свойственные системам
посадки метрового диапазона,
присущи и дециметровым системам.
Системы посадки сантиметрового
диапазона. Системы посадки сантиметрового диапазона разрабатывались с целью
замены существующих СП метрового и дециметрового диапазонов. Они отличаются
большими размерами секторов пропорционального наведения (СПН) (объем
воздушного пространства, в котором измеренная угловая координата прямо
пропорциональна угловому отклонению бортовой антенны от линии нулевого значения
угла), возможностью формирования оптимальных траекторий захода на посадку. Эти
системы могут одновременно обслуживать несколько ВС, следующих по различным
траекториям, на этапах захода на посадку, выравнивания, посадки, руления, а
также при взлете и заходе на второй круг.
Принципиальным отличием СП
сантиметрового диапазона является обеспечение посадки по траектории,
оптимальной для данного типа ВС. Линия курса и глиссады определяется на борту
ВС на основе сравнения измеренных значений углов в горизонтальной и
вертикальной плоскостях с заданными.
Международной организацией
гражданской авиации (1САО) стандартизована система посадки MLS (Microwave Landing System — микроволновая система посадки).
Полный комплект наземного
оборудования MLS (рис. 10.18) состоит из дальномерной и угломерной подсистем.
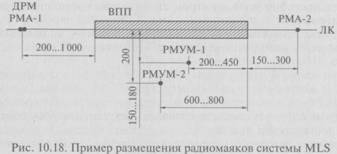 В состав
дальномерной подсистемы входит дальномерный радиомаяк ДРМ (ретранслятор
дальномера). В системе MLS используются
радиомаяк и бортовая аппаратура DME/P.
В состав
дальномерной подсистемы входит дальномерный радиомаяк ДРМ (ретранслятор
дальномера). В системе MLS используются
радиомаяк и бортовая аппаратура DME/P.
Угломерная подсистема использует
диапазон частот 5 031... 5 090,7 МГц и состоит из четырех каналов — по два
канала для измерения углов в горизонтальной и вертикальной плоскостях:
• азимутальный радиомаяк РМА-1,
обеспечивающий определение углового положения самолета относительно линии
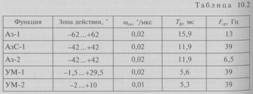
курса. Построение системы предусматривает два режима: с низкой (функция Аз-1)
и высокой (функция АзС-1) частотой повторения (табл.
Ю.2);
азимутальный радиомаяк РМА-2,
предназначенный для определения углового положения самолета относительно курса
посадки при уходе на второй круг (функция Аз-2);
угломестный радиомаяк РМУМ-1,
обеспечивающий определение угла в вертикальной плоскости при снижении самолета
(функция УМ-1);
угломестный радиомаяк РМУМ-2,
обеспечивающий определение угла в вертикальной плоскости при выравнивании
самолета (функция УМ-2).
Кроме угловых параметров в
угломерной подсистеме передаются основные и вспомогательные посадочные данные,
а также сигналы клиренса, указывающие направление выхода в сектор пропорционального
наведения при большом отклонении самолета от линии курса.
Угломерные маяки работают
поочередно в соответствии с регламентированной последовательностью передачи
угломерных функций. Синхронизация функций позволяет исключить интерференцию
сигналов различных функций, передаваемых на единой несущей частоте.
Угломерные функции имеют различные
периоды повторения. В табл. 10.2. приведены основные параметры угломерных
функций: зона действия по измеряемому углу, скорость сканирования 
длительность передачи функции Тф и средняя частота повторения функции Fcр.
Угловое положение  определяется на борту ВС по временному интервалу
определяется на борту ВС по временному интервалу  между сигналами С1
и С2, принятыми при сканировании ДН «туда» и «обратно» (рис.
10.19).
между сигналами С1
и С2, принятыми при сканировании ДН «туда» и «обратно» (рис.
10.19).
При ширине ДН антенны РМ
1...4" и скорости сканирования 0,02 °/с длительность сигналов составляет
50...200 мкс. Сигналы должны быть симметричны относительно центра сканирования.
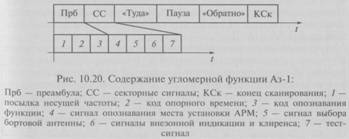
Кроме сигналов, непосредственно
несущих угловую информацию, на борту ВС принимаются и другие сигналы,
необходимые для работы бортового оборудования. На рис. 10.20 для примера
показано содержание угломерной функции Аз-1.
Преамбула (Прб) содержит:
·
посылку несущей
частоты (/), обеспечивающую подстройку частоты в бортовом приемнике;
·
код опорного времени
(2), определяющий момент начала отсчета;
·
код опознавания
функции (3), обеспечивающий необходимые переключения в бортовой аппаратуре при
переходе от одной функции к другой.
Секторные сигналы (СС) содержат:
·
сигнал опознавания
места установки АРМ (4)\
·
сигнал выбора
бортовой антенны (5), обеспечивающий выбор на борту ВС антенны, принимающей
максимальный сигнал;
·
сигналы внезонной
индикации и клиренса (6), используемые для исключения ложных измерений при
полете ВС вне СПН или сектора клиренса;
·
тест-сигнал (7) для
проверки бортовой аппаратуры.
Аналогичный тест-сигнал излучается
также в конце периода сканирования, перед импульсом конца сканирования (КСк).
Во время сканирования антенны
«туда» и «обратно» РМ излучает немодул и рованные колебания несущей частоты.
Временной интервал  между сигналами С1 и С2
линейно зависит от измеряемого угла
между сигналами С1 и С2
линейно зависит от измеряемого угла  .
.
 Принцип получения информации об угловом отклонении ВС от
заданной траектории захода на посадку один и тот же в азимутальном и
угломестном каналах. При этом в бортовой аппаратуре канала угла места имеется
возможность установки оптимального для данного класса ВС угла глиссады.
Принцип получения информации об угловом отклонении ВС от
заданной траектории захода на посадку один и тот же в азимутальном и
угломестном каналах. При этом в бортовой аппаратуре канала угла места имеется
возможность установки оптимального для данного класса ВС угла глиссады.
Обеспечение захода на посадку по
оптимальной для данного типа ВС траектории является большим достоинством СП
сантиметрового диапазона. Однако система существенно сложнее, чем СП метрового
и дециметрового диапазонов, а реализация ее потенциальных возможностей требует
решения многих технических проблем. В частности, качественные показатели
системы существенно ухудшаются при воздействии переотраженных сигналов.
В то же время интенсивно проводятся
работы по использованию дифференциального режима (ДР) СРНС (прежде всего, системы
GPS) для обеспечения посадки ВС по категориям ICAO. Многократно показана
пригодность ДР СРНС применительно к 1 категории, что позволило Федеральному
авиационному агентству (FAA) США отказаться от
продолжения работ по системе
 MLS, считая возможным продолжать использовать
систему ILS. Проводятся исследования возможностей создания специальных ДР
СРНС, позволяющих обеспечивать посадку в условиях II и даже III категорий ICAO. Перспективным
направлением при этом является использование стационарных «псевдоспутников»,
располагаемых на поверхности Земли и излучающих сигналы, эквивалентные
сигналам навигационных спутников. Ограничивающим фактором для использования
СРНС для целей обеспечения посадки в настоящее время является недостаточная
помехозащищенность СРНС. Однако в будущем, если эта проблема будет решена,
СРНС может стать основным средством инструментальной посадки самолетов.
MLS, считая возможным продолжать использовать
систему ILS. Проводятся исследования возможностей создания специальных ДР
СРНС, позволяющих обеспечивать посадку в условиях II и даже III категорий ICAO. Перспективным
направлением при этом является использование стационарных «псевдоспутников»,
располагаемых на поверхности Земли и излучающих сигналы, эквивалентные
сигналам навигационных спутников. Ограничивающим фактором для использования
СРНС для целей обеспечения посадки в настоящее время является недостаточная
помехозащищенность СРНС. Однако в будущем, если эта проблема будет решена,
СРНС может стать основным средством инструментальной посадки самолетов.
В настоящее время в эксплуатации
находятся все рассмотренные системы посадки (метрового, дециметрового и
сантиметрового диапазонов волн).
10.7. Системы межсамолетной навигации и
предупреждения столкновений
Назначение и решаемые задачи. В
соответствии с требованиями безопасности авиации осуществляются полеты
одиночных самолетов. Навигационное обеспечение полета основано на использовании
бортовых средств, предназначенных для определения положения и параметров
движения самолета, а также средств управления воздушным движением.
Однако в условиях плотного
воздушного движения (в частности, в аэродромной зоне) обеспечение безопасности
полета невозможно без учета воздушной обстановки вокруг каждого самолета.
Кроме того, в таких видах авиации,
как транспортная, полярная, спортивная и другие, широко применяются не только
одиночные, но и групповые полеты. Вождение самолетов в составе групп
представляет существенные трудности как для экипажей, так и для наземных служб
управления воздушным движением УВД. Наиболее полно удовлетворяют современным
требованиям обеспечения безопасности групповых полетов системы межсамолетной
навигации (МСН).
Системой межсамолетной навигации
называется совокупность бортовых радиоэлектронных средств и элементов
самолетного оборудования, включающая в себя измерители относительного положения
самолетов, штатные измерители параметров полета, устройства обработки,
отображения и индикации данных и команд и предназначенная для вождения
самолетов в составе групп.
Основными задачами, решаемыми
системами МСН, являются:
·
измерение параметров
относительного положения самолетов в группе и параметров полета;
·
обработка и
преобразование результатов измерений для отображения воздушной обстановки
экипажу самолета и, возможно, диспетчеру УВД;
·
формирование
управляющих сигналов и команд;
·
отображение
воздушной обстановки и индикация команд.
В зависимости от уровня
автоматизации процессов обработки данных и управления полетом системы МСН можно
разделить на два класса:
·
системы контроля
места, обеспечивающие экипаж самолета данными об относительном положении
самолета;
·
системы обеспечения
группового полета, обеспечивающие управление полетом самолета в составе
группы.
В качестве отдельного класса систем
МСН можно рассматривать бортовые системы предупреждения столкновений самолетов
(БСПС), решающие следующие задачи:
обнаружение в окружающем воздушном
пространстве всех опасных с точки зрения столкновений самолетов;
·
определение
параметров относительного положения самолета, угрожающего столкновением;
·
оценка времени до
момента возможного столкновения;
·
определение
целесообразных маневров уклонения от столкновения;
·
индикация экипажу
самолета воздушной обстановки и команд на выполнение маневров уклонения;
·
доведение до экипажа
конфликтного самолета информации о предполагаемых действиях и взаимная
координация маневров уклонения.
Общие принципы построения систем МСН. В составе бортового оборудования
самолета система МСН может строиться как отдельная самостоятельная система с
собственными источниками информации или как подсистема пилотажно-навигационного
комплекса. В любом случае обобщенная структурная схема имеет вид,
представленный на рис. 10.21.
Основой любой системы МСН являются
измерители относительных координат и скоростей самолетов. Измерители собственных
координат и скорости необходимы, в принципе, только как средство,
способствующее определению относительных координат.
В вычислительном устройстве
производится преобразование параметров относительного положения в форму,
требуемую для индикации воздушной обстановки, а также в сигналы управления.
Управление может производиться
автоматически (например, автоматическое поддержание строя) или
полуавтоматически.
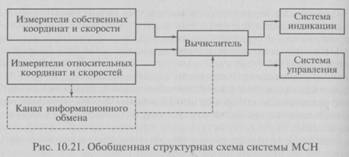
Канал информационного обмена,
строго говоря, не является обязательным элементом системы МСН. Однако
эффективность системы многократно возрастает, если взаимодействующие самолеты
имеют возможность обмениваться между собой и наземными службами различной
информацией (навигационной, служебной и т.д.).
Эффективность систем МСН в основном
определяется качественными показателями источников навигационной информации.
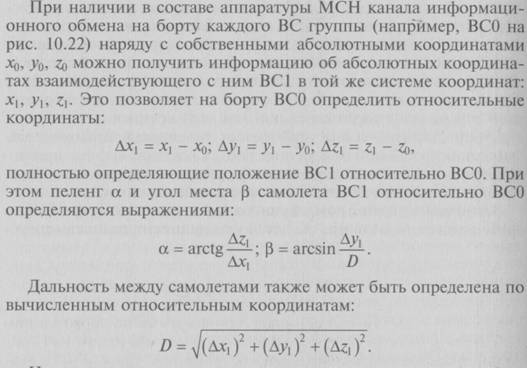
В зависимости от задачи, решаемой
системой МСН, могут использоваться различные параметры относительного
положения самолетов. Основные из этих параметров (в горизонтальной плоскости)
для пары самолетов ВСО, ВС1 показаны на рис. 10.22. Например, для поддержания
строя обычно необходимо определять дистанцию, измеряемую в направлении
горизонтального движения (d), интервал,
измеряемый в перпендикулярном направлении (l), и превышение по высоте (на рисунке не
показано). Однако эти параметры не могут быть непосредственно измерены и
должны вычисляться по результатам измерения других параметров. Непосредственно
на борту взаимодействующих ВС могут быть измерены расстояния (дальность D) и скорости их
изменения (радиальные скорости), относительные пеленги (а) или курсовые углы
(9), относительные углы места.
Дальности измеряются методом
«запрос-ответ» (ВСО передает запрос и принимает ответ ВС1) или «однопутевым»
методом по времени запаздывания принятого на ВСО сигнала ВС1 относительно
известного момента его излучения. «Однопутевой» метод обладает существенным
преимуществом перед методом «запрос- ответ» с точки зрения пропускной
способности системы, так как по сигналу ВС1 дальность до него (и радиальную
скорость по допплеровскому сдвигу частоты) могут измерить все самолеты, принявшие
сигнал. Однако реализация метода требует высокоточной синхронизации временных
шкал взаимодействующих самолетов.
Для измерения относительных угловых
координат (пеленгов и углов места) могут быть использованы амплитудные или
фазовые методы.
Использование амплитудного метода
предполагает наличие на борту самолета антенны с узконаправленной ДН. В секторе
обзора этой ДН измерение направления прихода сигнала может быть произведено с
достаточной точностью. Однако установка на борту современных самолетов антенной
системы, обеспечивающей круговое вращение (сканирование) узкой ДН, сопряжено с
большими техническими трудностями. На практике зона обзора, в которой могут
быть измерены угловые координаты, оказывается весьма узкой (около ±30...45°)
относительно оси самолета. Однако для решения ряда задач МСН этого вполне
достаточно.
При использовании фазового метода
угловые координаты определяются по разности фаз высокочастотных сигналов,
принимаемых разнесенными антеннами. В частности, для этих целей могут быть
использованы разреженные антенные решетки, обеспечивающие устранение
неоднозначности, присущей фазовым методам. В этом случае принципиально может
быть обеспечена круговая зона обзора как в горизонтальной, так и в вертикальной
плоскостях при высоком темпе обновления угломерной информации. Основной
проблемой при этом являются искажения фазы принимаемых сигналов за счет
влияния фюзеляжа самолета, что существенно затрудняет обеспечение требуемой
точности.
Более перспективным представляется
определение угловых координат на основе обмена между взаимодействующими
самолетами
 информацией об абсолютных координатах. Такое решение тем
более оправдано, что практически любой вариант совместного использования группы
самолетов обязательно предполагает обмен между ними служебной информацией.
информацией об абсолютных координатах. Такое решение тем
более оправдано, что практически любой вариант совместного использования группы
самолетов обязательно предполагает обмен между ними служебной информацией.
На борту современного самолета
имеются различные средства для определения собственного местоположения и
параметров полета: РСБН, РСДН, ИНС, ДИСС и т.д. Основным источником данных об
абсолютных координатах самолета и его скорости является в настоящее время
СРНС.
Будем считать, что абсолютные
координаты определяются в прямоугольной системе координат (см. рис. 10.22). Ось
X направлена на Север, ось Y— вертикально вверх (на рис. 10.22 не показана), ось Z дополняет систему до правой.
 Наличие двух независимых каналов определения дальности (непосредственные
измерения и вычисления по прямоугольным координатам) может быть использовано
для повышения точности и достоверности местоопределения при вторичной
обработке.
Наличие двух независимых каналов определения дальности (непосредственные
измерения и вычисления по прямоугольным координатам) может быть использовано
для повышения точности и достоверности местоопределения при вторичной
обработке.
Наряду с относительными
координатами информационный обмен позволяет определить и составляющие вектора
относительной скорости  , что обеспечивает возможность экстраполяции относительных
координат в промежутках между моментами их определения.
, что обеспечивает возможность экстраполяции относительных
координат в промежутках между моментами их определения.
Усложнение задач, которые ставятся
перед системами МСН, приводит к необходимости определения и передачи по каналу
связи ряда других параметров относительного положения и параметров полета.
Например, в некоторых случаях может использоваться обмен данными о
пространственной ориентации самолета (углах крена и тангажа).
Более простые задачи решаются,
естественно, при меньшем числе измеряемых параметров. В качестве примера далее
рассмотрена задача встречи двух самолетов в воздухе.
Обеспечение встречи самолетов в
воздухе. Задача встречи двух самолетов в воздухе является исторически первой
задачей, относящейся к МСН, которая была сформулирована и решена.
Задача решается на основе измерения
дальности между самолетами и отклонения от нулевого пеленга по отношению к взаимодействующему
ВС (рис. 10.23).
Самолеты ВСО и ВС1 обмениваются
между собой сигналами запроса и ответа, измеряя дальность D. Для определения
отклонения от нулевого пеленга используется антенная система с двумя
диаграммами направленности, пересекающимися на определенном, заранее выбранном
направлении (направлении нулевого пеленга). В качестве направления нулевого
пеленга технически удобно выбрать направление строительной оси самолета.
Отклонение вектора путевой скорости от этой оси (угол сноса) измеряется
допплеровским измерителем скорости и угла сноса.
Принимая сигналы ВС1 по каждой из
пересекающихся диаграмм направленности и сравнивая их амплитуды, можно судить
о величине отклонения от равносигнального направления в определенной зоне вблизи
от направления нулевого пеленга.
Основным параметром,
характеризующим отклонение ВС1 от линии нулевого пеленга, является коэффициент
разнослышимости:
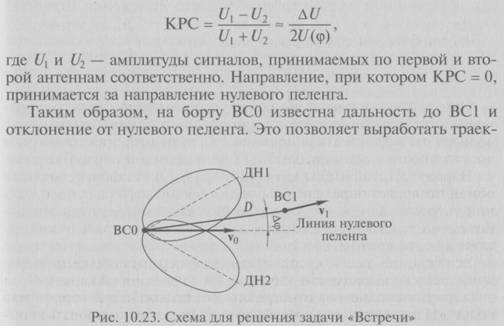
торию полета ВСО по направлению к
ВС1. Вид траектории зависит от конкретных условий полетного задания.
На борту ВС 1 также измеряется
дальность до ВСО. Угловое положение ВСО на борту ВС1 может быть получено от
ВСО, если между двумя ВС имеется канал информационного обмена.
Принципы построения бортовых СПС. В соответствии с требованиями ICAO системой предупреждения столкновений должны быть оборудованы
все самолеты гражданской авиации. Исключение могут составлять самолеты местных
воздушных линий, осуществляющие полеты на малых высотах по визуальным ориентирам.
Определение возможности конфликтной
ситуации при сближении двух самолетов предполагает введение определенных критериев
опасности сближения. Формирование критериев производится по данным о
параметрах воздушной обстановки, вырабатываемым каждым самолетом независимо
(автономные БСПС) или с использованием обмена информацией между самолетами либо
между самолетом и наземными службами (неавтономные БСПС). В настоящее время
автономные БСПС не находят применения ввиду технической трудности определения
параметров траекторий других самолетов с помощью оборудования только данного
самолета.
Оценка опасности, как правило,
производится раздельно в горизонтальной и вертикальной плоскостях, что связано
с предположением малости вертикальных составляющих скоростей ВС.
В горизонтальной плоскости степень
опасности конфликтующего самолета (КС) определяется обычно двумя основными
факторами: временем, оставшимся до момента наибольшего сближения  , и величиной
дальности наибольшего сближения (пролета)
, и величиной
дальности наибольшего сближения (пролета)

Рассмотрим кинематическую схему
сближения двух самолетов ВСО и ВС1 в горизонтальной плоскости (рис. 10.24).
Пусть в начальный момент времени t = 0 расстояние между ними равно D0. Сближение самолетов
определяется относительной скоростью  — векторы скорости ВСО и ВС1 соответственно.
Тогда в произвольный момент времени t расстояние составит
— векторы скорости ВСО и ВС1 соответственно.
Тогда в произвольный момент времени t расстояние составит
где  — модуль и радиальная проекция вектора относительной
скорости соответственно.
— модуль и радиальная проекция вектора относительной
скорости соответственно.
В качестве критерия опасности в
этом случае выбирается условие  — время предупреждения, необходимое для
предотвращения столкновения.
— время предупреждения, необходимое для
предотвращения столкновения.
Оценка угрозы столкновения в
вертикальной плоскости производится по относительной высоте.

 Ввиду сложности измерения относительного угла места
определение относительной высоты производится на основе обмена информацией о
высоте полета между конфликтующими самолетами.
Ввиду сложности измерения относительного угла места
определение относительной высоты производится на основе обмена информацией о
высоте полета между конфликтующими самолетами.
Оценка относительной высоты позволяет
устранить ложные тревоги, возникающие в том случае, когда самолеты могут
разойтись по высоте, а «критерий  указывает на опасность столкновения.
указывает на опасность столкновения.
Время, оставшееся до наибольшего
сближения  и минимальное расстояние между самолетами
и минимальное расстояние между самолетами  получим, приравняв нулю производную дальности D(t) по времени
получим, приравняв нулю производную дальности D(t) по времени 
 В идеале БСПС должна обеспечивать
определение дальности, курсового угла и их первых производных. Наиболее сложной
оказывается задача определения угловых координат КС. Поэтому на борту ВС часто
известны только дальности и скорости их изменения. В этом случае полагают
В идеале БСПС должна обеспечивать
определение дальности, курсового угла и их первых производных. Наиболее сложной
оказывается задача определения угловых координат КС. Поэтому на борту ВС часто
известны только дальности и скорости их изменения. В этом случае полагают  . При этом величина /сбл
минимальна и определяет время до предполагаемого столкновения
. При этом величина /сбл
минимальна и определяет время до предполагаемого столкновения 
Если выбранные критерии в обеих
плоскостях указывают на угрозу столкновения (УС), то должны быть выработаны
согласованные маневры уклонения. Отсутствие надежной информации об
относительных угловых координатах является основной причиной того, что маневры
уклонения осуществляются только в вертикальной плоскости. Определение маневра
производится на том ВС, который первым обнаружил УС. Информация о предлагаемом
маневре передается КС и диспетчеру службы УВД. Последнее необходимо для
избежания «вторичных конфликтов», т.е. чтобы при уклонении от возможного
столкновения с одним самолетом не возникло конфликтной ситуации с другим
самолетом. При необходимости диспетчер имеет возможность вмешаться, запретив
предполагаемый маневр уклонения или внеся в него коррективы.
Руководящими документами ICAO диспетчеру предоставлено право окончательного решения по
выбору маневра уклонения. Это возлагает на него большую ответственность и
служит причиной высоких стрессовых нагрузок, приводящих к ошибкам, которые
могут оказаться роковыми. Видимо, именно ошибка диспетчера явилась причиной
столкновений российского ТУ-154 с грузовым самолетом Boeing над Германией летом 2002 г. Снижение нагрузки на диспетчерскую службу путем повышения роли и участия экипажа в принятии решений по
управлению полетом признано 1САО одним из основных направлений развития систем
УВД.
Бортовая система предупреждения
столкновений TCAS. Бортовая система
предупреждения столкновений типа TCAS (Traffic Alert and Collision Avoidance System) была предложена
Федеральным управлением США и в настоящее время принята в гражданской авиации в
качестве основы для стандартизации БСПС.
Система TCAS является независимой системой, дополняющей наземную систему
УВД, и выполняет следующие функции:
·
наблюдение;
·
выработка
консультативной информации;
·
обнаружение угрозы
столкновения с ВС;
·
выработка рекомендаций
на маневр уклонения в вертикальной плоскости;
·
координация
маневров;
·
связь с наземными
системами.
Длительность рабочего цикла системы
номинально составляет 1 с и в конфликтной ситуации не должна превышать 1,2 с.
Система TCAS позволяет отображать информацию о ВС, находящемся, как
минимум, в пределах 11 км (6 морских миль) по дальности и ±370 м (1200 футов) по абсолютной высоте, если конфликтующее ВС передает данные о высоте.
Точность определения дальности до
ВС, представляющего угрозу, должна быть не менее 14,5 м, а рекомендуемое значение СКО определения относительного пеленга не должно превышать 10°.
Указанная точность определения относительного пеленга достаточна для целей
визуального отслеживания потенциальной угрозы, однако не позволяет вырабатывать
рекомендации по расхождению ВС в горизонтальной плоскости и надежного
прогнозирования горизонтального расстояния при расхождении ВС.
Работа системы TCAS тесно увязана с работой системы вторичной радиолокации (CBPJ1) УВД. Коротко
рассмотрим принципы работы CBPJ1.
CBPJI обеспечивают определение координат ВС, оборудованных
ответчиками, и получение от этих ВС полетной и служебной информации (бортовой
номер, высота, скорость и курс полета, запас топлива, выпуск шасси, наличие
аварийной ситуации и т.д.). В состав CBPJI входят вторичные
обзорные радиолокаторы (ВОРЛ) и бортовые ответчики.
ВОРЛ выполняет функцию запросчика в
системе активной радиолокации с активным ответом. По сигналам ответа ВОРЛ определяет
наклонную дальность и азимут ВС, а также извлекает из кодированных сигналов
полетную и служебную информацию. Применение активного ответа позволяет при
сохранении мощности излучения существенно повысить дальность действия системы.
Бортовой ответчик представляет
собой приемопередатчик, генерирующий ответный сигнал в случае приема запроса
ВОРЛ. Сигнал ответа формируется на основе данных, поступающих от бортовых
систем ВС, в зависимости от содержания сигнала запроса.
По принципу работы СВРЛ
подразделяются на неселективные и дискретно-адресные.
В неселективных системах
запрашивающий ВОРЛ посылает группы запросных импульсов, которые запускают
каждый бортовой ответчик, находящийся в зоне перекрытия главного лепестка ДН
антенны радиолокатора. При получении такой группы запросных импульсов ответчик
передает группу ответных импульсов. Эти ответы принимаются и декодируются
запрашивающим ВОРЛ. Измеренные значения дальностей и азимутов, а также
декодированные данные, содержащиеся в сообщении, направляются диспетчеру
службы УВД. В зависимости от кода запроса ответный сигнал может содержать
информацию о бортовом номере, барометрической высоте, запасе топлива, путевой
скорости и путевом угле.
Используются два неселективных
режима работы ВОРЛ:
·
режим УВД,
применимый только на внутренних трассах РФ;
·
режим RBS, стандартизованный ICAO для международного применения.
СВРЛ режима S (дискретно-адресные) основаны на тех же принципах, что и
неселективные СВРЛ. Главные отличия состоят в следующем:
·
всем ВС, работающим
в режиме S, индивидуально присваиваются уникальные адреса;
·
на запрос ВОРЛ в
режиме S отвечает только тот ответчик, которому адресован запрос;
·
каналы запроса и
ответа используют помехоустойчивое кодирование.
Эксплуатируемые самолеты
оборудованы ответчиками, работающими в различных режимах. Для обеспечения взаимодействия
с любыми ответчиками ВОРЛ режима S может излучать запросные сигналы
различных видов:
·
запрос общего вызова
режимов RBS и 5;
·
общего вызова только
режима RBS
·
общего вызова
режимов УВД и S;
·
режима S.
На запросы общего вызова отвечают
все ответчики, получившие запрос. На адресный запрос отвечает только тот
ответчик, которому адресован запрос.
Формат передаваемых данных в
сигналах запроса и ответа режима S определяется протоколами,
стандартизованными ICAO. Объем передаваемой информации составляет 56 или 112 бит. Для
целей вторичной радиолокации чаще используются короткие сообщения (56 бит), в
которых передаются данные о высоте, а также информация о стадии движения
(состоянии полета) ВС — нахождение ВС в воздухе, передвижение его по земле,
предупреждение об опасности, специальная идентификация местоположения.
Длинные посылки (112 бит)
предназначены в основном для решения задач наблюдения. При этом по линии
«борт—земля» может передаваться расширенная навигационная (например, координаты
ВС и параметры полета) "и служебная информация, а по линии «земля —борт» —
служебная информация (например, сведения о погодных условиях, состоянии полосы,
наличии пассажиров, ожидающих рейс в аэропорте) и адресные запросы на
получение конкретной информации с борта ВС.
Дискретная адресация и цифровое
кодирование, примененные в передачах режима S, позволяют
использовать их в виде цифровой линии передачи данных. Форматы передаваемых
запросов и ответов, определенные в системе режима 5, содержат поля кодирования
для передачи информации. Такая же система передачи данных может быть
использована для обмена информацией по линии «борт—борт». Это позволяет решать
задачи межсамолетной навигации и предупреждения столкновений. На этом принципе,
в частности, основана работа системы предупреждения столкновений типа TCAS.
В упрошенном виде принцип работы
системы TCAS заключается в следующем. Система периодически посылает
запросные сигналы общего вызова для всех радиомаячных систем УВД и ВС,
оборудованных ответчиками УВД, работающими в режиме S. В ответ на эти
запросы ответчики посылают сигналы, содержащие значения их текущей высоты. По
этим сигналам система TCAS измеряет дальность
до отвечающего ВС. Для оценки угрозы столкновения используются данные высоты и
соотношения высот ВС, вертикальной скорости, дальности и скорости изменения
дальности. Если в составе бортового оборудования имеется аппаратура,
обеспечивающая определение относительных угловых координат, то эта информация
также используется для оценки угрозы столкновения. При этом могут быть оценены
время, оставшееся до момента наибольшего сближения  и величина дальности наибольшего сближения (пролета)
и величина дальности наибольшего сближения (пролета)  . Если угловые координаты не измеряются, то для оценки
угрозы столкновения в горизонтальной плоскости используется «критерий т».
. Если угловые координаты не измеряются, то для оценки
угрозы столкновения в горизонтальной плоскости используется «критерий т».
Если в соответствии с используемым
критерием обнаружена угроза столкновения, то период обновления информации между
защищающимся и конфликтующим самолетами уменьшается до 1 с, а общий
широковещательный режим наблюдения (общий вызов) сменяется на адресный запрос
и адресный ответ. В систему управления самолета и экипажу выдается
консультативная информация о воздушном движении. На индикаторе кругового обзора
пилотажно-навигационного комплекса отображаются местоположение (дальности и
пеленги), высота (относительная или абсолютная) и данные об изменениях
абсолютных высот тех КС, которые представляют потенциальную угрозу.
В случае обнаружения угрозы
столкновения система выдает рекомендации, которые могут быть разделены на две
группы:
·
корректирующие,
предписывающие изменение высоты полета или скорости ее изменения;
·
профилактические,
которые инструктируют пилота избежать некоторых маневров.
Рекомендации по предотвращению
угрозы столкновения выдаются за 15...35 с до предполагаемого момента
наибольшего сближения конфликтующих ВС и должны обеспечивать расхождение ВС по
высоте не менее чем на 300 м.
Маневры предотвращения
столкновения, выработанные системой TCAS, могут создавать ситуацию конфликта с
другим ВС, оборудованным системой TCAS, поскольку этот самолет может принять к
выполнению маневр, направленный на первый самолет. Для избежания подобных
ситуаций ВС обмениваются сообщениями согласования, используя адресные запросы.
Самолет, который обнаружил угрозу
столкновения первым, вырабатывает маневры уклонения и инициализирует процедуру
связи с конфликтующим самолетом для координации маневров. Одновременно взаимное
расположение конфликтующих самолетов и предполагаемые маневры уклонения
отображаются на индикаторе диспетчера системы УВД. В необходимых случаях
диспетчер имеет возможность включиться в процесс разрешения конфликтной
ситуации (например, отменить маневры, рекомендуемые системой TCAS, и предложить
собственный вариант действий). В соответствии с нормативными документами ICAO, действующими в
настоящее время, последнее слово остается за диспетчером.
Рекомендации системы TCAS отключаются на высоте 300 м и ниже во избежание неудобств при посадке самолета, а также по сигналам систем, имеющих более высокий приоритет
(например, GPWS — Ground Proximity Warning System — системы сигнализации опасного сближения с землей).
Исследования, проведенные
фирмами-разработчиками системы TCAS под контролем ICAO, а также имеющийся
опыт эксплуатации системы показали ее высокую эффективность с точки зрения
снижения риска столкновения. Что не менее важно, система сама не ухудшает
сложившуюся ситуацию. Однако полной защиты от возможного столкновения система TCAS не обеспечивает. Кроме того, постоянно и высокими темпами
растет интенсивность воздушного движения и напряженность в воздушном пространстве,
особенно в районе аэропортов. Это является катализатором интенсивных усилий,
направленных на разработку новых, более эффективных СП. Одним из результатов
этих усилий является система TCAS-2000, являющаяся развитием системы TCAS. Проводятся также
работы по построению бортовых СПС на основе использования данных СРНС.
Отдельного внимания заслуживают
системы автоматического зависимого наблюдения (АЗН), определенные ICAO как один из основных элементов будущей глобальной системы
Связи, Навигации, Наблюдения/Организации Воздушного Движения. АЗН является
методом наблюдения, при котором воздушное судно (или любой другой абонент)
автоматически по линии передачи данных периодически предоставляет конкретному
(при адресном АЗН) или любому (при радиовещательном АЗН) потребителю информацию
своих бортовых систем. В зависимости от конкретной реализации АЗН может
включать в себя функции наблюдения по линиям связи «борт земля» и «борт—борт»,
а также поддерживать некоторые виды применения, относящиеся к взаимодействию
между воздушными судами и наземным транспортом (например, автозаправщиком).
Одной из основных функций АЗН
является обеспечение экипажа самолета информацией об окружающей воздушной
обстановке. В перспективе предусматривается доведение этой функции до функции
предотвращения столкновений. В свою очередь, на основе решения задачи
предотвращения столкновений может быть организовано автономное эшелонирование.
При этом пилоты смогут принимать на себя ответственность за обеспечение
эшелонирования, обеспечивая тем самым реализацию перспективных концепций ICAO: «свободного полета»
и разделения ответственности за эшелонирование между диспетчером и пилотом.
Автоматическое зависимое наблюдение
может являться основой и для построения систем МСН. Обмен данными по линии
«борт—борт» при обеспечении необходимого объема и темпа обновления информации
позволяет обеспечить решение не только задачи встречи ВС в воздухе, но и более
общих задач МСН, включая автоматическое управление групповым полетом.
Контрольные вопросы
1.В чем различие фазового и
импульсно-фазового методов измерения РНП?
2.Поясните зависимость погрешности
измерения дальности (разности дальностей) в ФРНС от номинала несущей частоты
сигнала.
3.Почему при измерении РНП в ИФРНС
используется лишь начальный участок фронта сигнального импульса? Как это
влияет на погрешность измерения, обусловленную действием шума?
4.Поясните процедуру устранения
многозначности измерений по начальному участку фронта сигнала.
5.Погрешность измерений РНП в ИФРНС
зависит от номинала несущей частоты f0 сигнала. К каким последствиям приводит увеличение f0?
6.В чем причина ограниченной
пропускной способности дальномерного канала РСБН и системы DME?
7.Поясните особенности работы
угломерного канала РСБН в ненаправленном и направленном режимах.
8.Как используется эффект Допплера
для снижения ошибок измерения азимута в системе VOR?
9.Поясните принцип двухшкального
измерения азимута в системе TACAN.
10.Поясните различия равное и гнал
ьных маяков и маяков с «опорным нулем», используемых в системах посадки
метрового диапазона.
11.Перечислите основные недостатки
систем посадки метрового и дециметрового диапазонов волн.
12.Поясните принцип формирования
измерительных сигналов в системе посадки сантиметрового диапазона.
13.Сформулируйте основные задачи
систем межсамолетной навигации.
14.Поясните принципы обнаружения
угрозы столкновения самолетов.
15.Поясните сущность «критерия  .
.
16.Сформулируйте основные принципы
построения системы TCAS.
СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
11.1. Спутниковые радионавигационные
системы первого поколения
В 1957 г. группа советских ученых под руководством академика В.А. Котельникова экспериментально
подтвердила возможность определения параметров движения искусственных спутников
Земли по результатам измерений допплеровского сдвига частоты сигнала,
излучаемого с ИСЗ, в точке приема с известными координатами. Была установлена
также возможность решения обратной задачи — нахождения координат точки приема
по измеренному допплеровскому сдвигу частоты сигнала, излучаемого с ИСЗ, параметры
движения которого известны.
Использование ИСЗ в качестве
радионавигационной опорной станции, координаты которой хотя и изменяются, но заранее
известны для любого момента времени, позволило создать ряд проектов спутниковых
радионавигационных систем первого поколения. Характерной чертой первого
поколения СРНС является применение низковысотных (низкоорбитных) ИСЗ и
использование для навигационных определений сигнала одного ИСЗ, оказывающегося
в зоне радиовидимости наблюдателя.
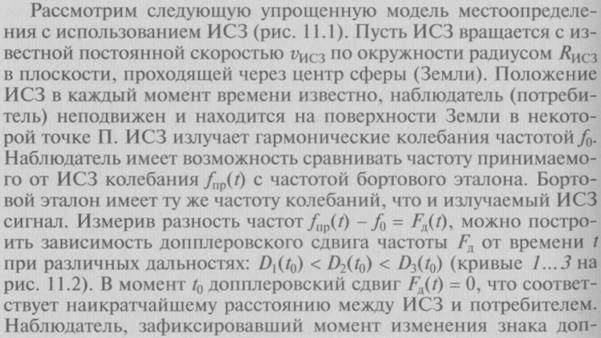
плеровской частоты, может
утверждать, что находится в плоскости, нормальной к вектору скорости ИСЗ. Зная
координаты ИСЗ в момент времени t0 и направление его движения, можно построить
поверхность положения в виде плоскости, а также линию положения на поверхности
Земли (линия СП на рис. 11.1). Для опре- 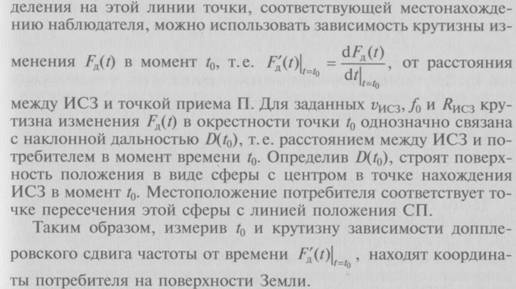
Рассмотренный метод определения
координат называют дифференциальным допплеровским (траверзным).
В космических РНС особое внимание
уделяется зависимости качества радионавигационных измерений от мощности
излучаемого ИСЗ сигнала. Помехоустойчивость радионавигационного канала тем
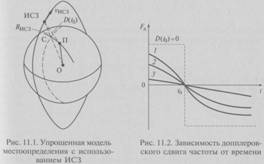
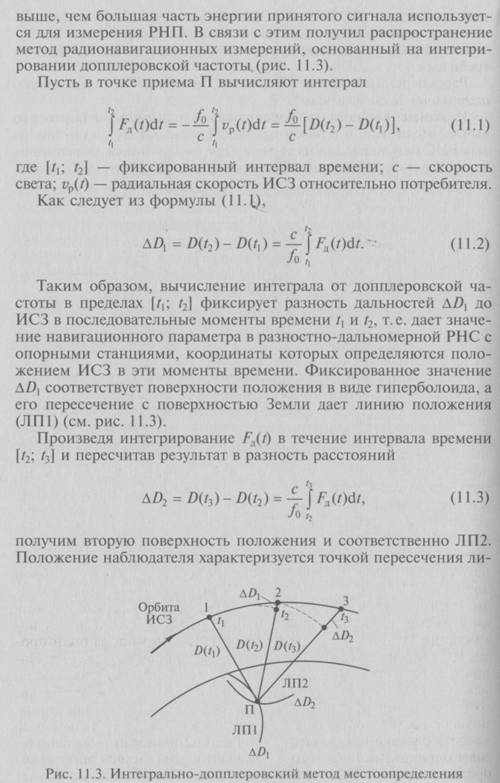
линий положения (ЛП1 и ЛП2).
Возникающая при этом неоднозначность решения навигационной задачи устраняется,
как и в наземных РНС, с помощью априорных данных о координатах потребителя.
Рассмотренный метод нахождения
координат называется интегральным допплеровским.
Искомые координаты рассчитывают с
помощью бортового вычислителя. Как и в наземных беззапросных РНС, в спутниковых
РНС основным условием является точная привязка результатов измерения РНП к
единой шкале времени. Для этого в аппаратуру потребителя вводят
высокостабильный эталон частоты, обеспечивающий формирование бортовой шкалы
времени, коррекцию которой осуществляют с помощью специальных меток времени в
принимаемом радиосигнале. Кроме того, для вычисления текущих пространственных
координат ИСЗ на борту потребителя необходимо иметь эфемероидную информацию,
т.е. предвычисленные значения координат и вектора скорости ИСЗ.
Эфемероидную информацию в форме
параметров орбиты ИСЗ либо его геоцентрических координат передают с борта ИСЗ с
помощью модуляции (фазовой или частотной) непрерывной несущей, используемой
для интегральных допплеровских измерений.
Приведенные соображения о
возможности применения в СРНС интегрального допплеровского метода носят общий
характер и не учитывают ряда важных факторов, влияющих на качественные
показатели системы. Для того чтобы составить представление о влиянии этих
факторов (интервалов времени между навигационными сеансами, параметров
движения потребителя и др.) на точность определения местоположения
потребителя, рассмотрим низкоорбитную СРНС «Транзит». В состав этой СРНС входят
пять или шесть ИСЗ, наземный комплекс контроля и парк бортовой аппаратуры
потребителей. ИСЗ расположены на круговых полярных орбитах высотой около 1 100 км и имеют период обращения около 107 мин. При таких параметрах орбит каждый ИСЗ может
находиться в зоне радиовидимости потребителя, радиус которой достигает 2 ООО
км, от 10 до 16 мин. Учитывая, что период передачи навигационной информации (эфемероидная
информация, метки времени, служебная информация) равен 2 мин, а время нахождения
ИСЗ в зоне радиовидимости 10... 16 мин, за один пролет ИСЗ можно получить
несколько поверхностей положения. Например, если  мин, что соответствует расстоянию между положениями
спутника в точках 1, 2, 3, ... около 960 км, то число поверхностей положения будет 5...8, тогда как минимальное достаточное для местоопределения число 3.
Избыточное число образованных поверхностей положения может быть использовано
для статистического сглаживания получаемых оценок координат. Кроме сглаживания
избыточная информация позволяет
мин, что соответствует расстоянию между положениями
спутника в точках 1, 2, 3, ... около 960 км, то число поверхностей положения будет 5...8, тогда как минимальное достаточное для местоопределения число 3.
Избыточное число образованных поверхностей положения может быть использовано
для статистического сглаживания получаемых оценок координат. Кроме сглаживания
избыточная информация позволяет
измерить не только координаты:
географическую широту и долготу, но и расхождение между шкалами времени
потребителя и ИСЗ
В рассматриваемой системе применяют
два высокочастотных сигнала: основной (400 МГц) и вспомогательный (150 МГц),
что дает возможность произвести компенсацию ошибки, обусловленной ионосферной
рефракцией при допплеровских измерениях. Передачу навигационной информации
осуществляют путем фазовой модуляции обеих несущих двоичными посылками ±60°,
что сохраняет постоянный уровень несущего колебания и обеспечивает устойчивую
работу канала фазовой автоподстройки частоты (ФАПЧ) вне зависимости от
передаваемой последовательности информационных посылок.
При движении потребителя точность
местоопределения зависит от точности оценки скорости объекта. Это объясняется
тем, что для нахождения координат потребителя как точки пересечения нескольких
поверхностей положения, соответствующих различным моментам времени, необходимо
линии положения привести к одному моменту времени. Точное решение этой задачи
возможно лишь при известных параметрах движения потребителя в интервалах между
оценками РНП. Например, при погрешности измерения скорости объекта 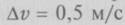 погрешность местоопределения составляет 500 м, в то время как погрешность местоопределения неподвижного объекта приблизительно равна 50 м.
погрешность местоопределения составляет 500 м, в то время как погрешность местоопределения неподвижного объекта приблизительно равна 50 м.
Кроме того, в рассматриваемых СРНС
невозможно непрерывно осуществлять местоопределение потребителей из-за наличия
длительных перерывов между обсервациями (прохождениями спутниками зоны
радиовидимости). Средний интервал времени между обсервациями зависит от
географической широты потребителя и колеблется от 35 мин в приполярных районах
до 90 мин вблизи экватора. Уменьшение этого интервала путем увеличения числа
спутников в данных системах невозможно, так как все ИСЗ излучают сигналы на
одних и тех же частотах. При нахождении в зоне радиовидимости нескольких
спутников возникают взаимные помехи, что нарушает работоспособность систем.
Таким образом, существующие
низкоорбитные СРНС обладают, по крайней мере, двумя серьезными недостатками:
малой точностью определения координат высокодинамичных объектов и большим
интервалом времени между обсервациями.
11.2. Спутниковые радионавигационные
системы второго поколения
Несоответствие СРНС первого
поколения требованиям высокоточного непрерывного навигационного обеспечения
привело к разработке нового, второго, поколения СРНС. Характерными особенностями
СРНС второго поколения являются применение средневысотных (среднеорбитных) ИСЗ
и использование для навигационных определений сигналов нескольких одновременно
находящихся в зоне радиовидимости ИСЗ. В состав СРНС входят подсистема ИСЗ,
подсистема контроля и управления (наземный
командно-измерительный комплекс) и
подсистема аппаратуры потребителей.
В состав космической подсистемы
входят 18...24 ИСЗ, размещенных равномерно в нескольких орбитальных
плоскостях. Высота орбит ИСЗ около 20000 км, период обращения 12 ч. На рис. 11.4 в качестве примера показано размещение навигационных ИСЗ системы ГЛОНАСС при
полном развертывании. В зоне радиовидимости потребителя в любой момент может
находиться до 11 — 12 ИСЗ, что обеспечивает возможность непрерывного
определения трех координат (долгота, широта, высота). Временные шкалы всех ИСЗ
согласованы между собой и синхронизируются системой единого времени.
Подсистема контроля и управления
(наземный командно-измерительный комплекс) осуществляет слежение за ИСЗ и
обеспечивает спутники информацией, необходимой для формирования
радионавигационных сигналов и навигационных сообщений.
Навигационная аппаратура
потребителей (подсистема аппаратуры потребителей) производит выбор рабочего
созвездия ИСЗ, поиск и слежение за сигналами, обработку измеряемых РНП и эфемероидной
информации для определения координат и составляющих скорости потребителей.
В рассматриваемой СРНС ИСЗ излучают
двоичный фазоманипулированный сигнал, код которого является индивидуальной
принадлежностью каждого ИСЗ. Это позволяет всем ИСЗ работать на общей несущей
частоте, не создавая заметных внутрисистемных помех. Измеряемыми
радионавигационными параметрами служат время запаздывания и допплеровское
смещение частоты принимаемого радионавигационного сигнала относительно его
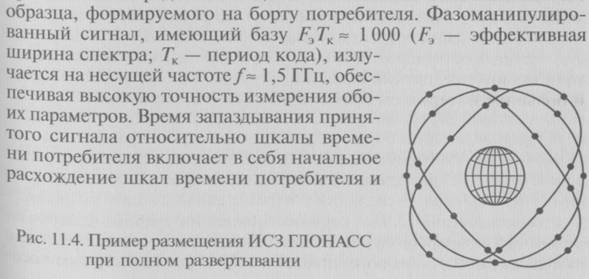
ИСЗ и задержку распространения
сигнала на трассе ИСЗ —потребитель. Если фазы опорных генераторов потребителя
и ИСЗ совпадают (расхождение шкал времени равно нулю), то измеряемое время
запаздывания пропорционально дальности между ИСЗ и потребителем. В противном
случае оно пропорционально квазидальности (псевдодальности) и для оценки
координат необходимо использовать квазидальномерные или разностно-дальномерные
измерения подобно тому, как это делается в наземных РНС.
Измерение времени запаздывания
принимаемого сигнала производится на основе корреляционного метода.
Формируемая в приемнике копия сигнала ИСЗ перемножается с принятым сигналом,
образуя после интегрирования корреляционную функцию. Выходной сигнал
коррелятора достигает максимального значения, пропорционального числу
элементов кода, когда формируемая копия (образец) совпадает по времени и
частоте с принимаемым сигналом. Получаемый максимум функции корреляции пропорционален
времени интегрирования в корреляторе. Выбором достаточно большого времени
интегрирования достигается высокая точность измерения.
Поиск максимума функции корреляции
на плоскости время — частота тем надежнее, чем меньше уровень боковых
лепестков. В связи с тем, что сигналом является двоичная фазоманипулированная
последовательность большой длины (N ~ 1 ООО), уровень боковых лепестков сравнительно мал и они
практически не влияют на надежность поиска.
В связи с тем, что для определения
координат необходимо иметь сведения о местоположении ИСЗ на каждый момент
времени, в рассматриваемой СРНС, как и в СРНС первого поколения, на борту
потребителя следует располагать эфемероидной информацией. Для этого на борту
ИСЗ дальномерный фазоманипулированный радионавигационный сигнал подвергается
дополнительной бинарной фазовой манипуляции в соответствии с информационным
сообщением, представленным последовательностью нулей и единиц. Требуемая
скорость передачи информации (эфемериды, поправки на распространение радиоволн
и др.) невелика (около 50 бит/с), поэтому длительность одного информационного
символа составляет приблизительно 20 мс, в то время как период дальномерного
кода — около 1 ООО мкс, что практически исключает влияние передаваемого
сообщения на качество измерения псевдодальностей на борту потребителя. Таким
образом, выделяемый на борту потребителя информационный сигнал несет сведения
о параметрах движения ИСЗ, а дальномерный радионавигационный сигнал — сведения
о параметрах движения потребителя относительно ИСЗ. Для составления
навигационных уравнений удобно использовать систему декартовых координат (рис.
11.5) с началом в центре Земли (геоцентрическую прямоугольную систему 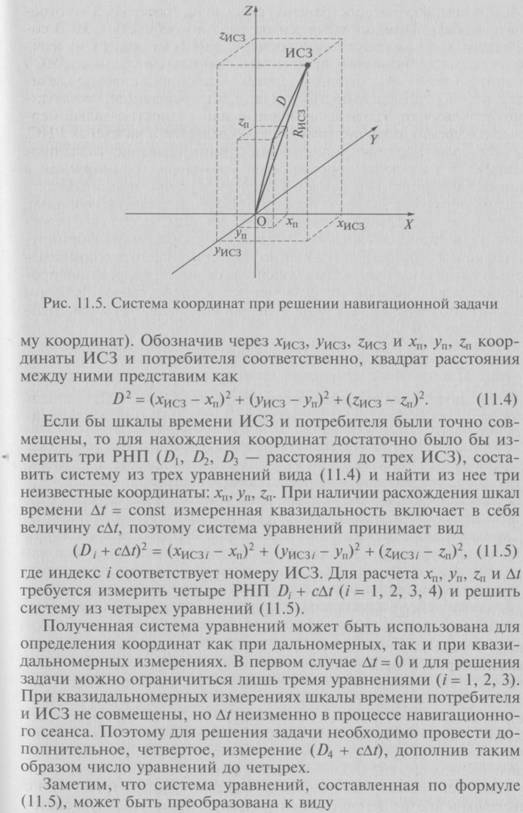
 Возвращаясь к решению навигационной задачи при
квазидальномерных измерениях, укажем на возможность оценки составляющих
вектора скорости потребителя "по результатам измерений разности частот
принятого сигнала и бортового опорного генератора. Для этого вновь обратимся к
системе уравнений, записанных по формуле (11.5). Переход от измерения
дальностей (квазидальностей) к измерению скоростей (квазискоростей) позволяет с
помощью дифференцирования по времени уравнений (11.5) вычислить значения
составляющих вектора скорости потребителя
Возвращаясь к решению навигационной задачи при
квазидальномерных измерениях, укажем на возможность оценки составляющих
вектора скорости потребителя "по результатам измерений разности частот
принятого сигнала и бортового опорного генератора. Для этого вновь обратимся к
системе уравнений, записанных по формуле (11.5). Переход от измерения
дальностей (квазидальностей) к измерению скоростей (квазискоростей) позволяет с
помощью дифференцирования по времени уравнений (11.5) вычислить значения
составляющих вектора скорости потребителя 
 Прежде чем перейти к формальной записи новой системы
уравнений целесообразно рассмотреть влияние изменения величины
Прежде чем перейти к формальной записи новой системы
уравнений целесообразно рассмотреть влияние изменения величины  в процессе измерений на погрешности определения координат
и скорости потребителя. При высокой стабильности опорных генераторов и
достаточно высокой точности установки их номинальных частот изменение за время навигационного сеанса невелико и при нахождении
координат потребителя им можно пренебречь. При измерении же скорости
зависимость от времени существенно влияет на погрешность измерения.
в процессе измерений на погрешности определения координат
и скорости потребителя. При высокой стабильности опорных генераторов и
достаточно высокой точности установки их номинальных частот изменение за время навигационного сеанса невелико и при нахождении
координат потребителя им можно пренебречь. При измерении же скорости
зависимость от времени существенно влияет на погрешность измерения.
Для количественной оценки этого
влияния рассмотрим характерный для СРНС пример. Пусть несущая частота сигнала f = 109
Гц. Относительное расхождение номиналов частот опорных генераторов потребителя
и ИСЗ равно  что соответствует абсолютному расхождению 0,1 Гц. В этом
случае шкалы времени потребителя и ИСЗ перемещаются друг относительно друга на
1 не за 1 с, что соответствует изменению дальности со скоростью 0,3 м/с. Если
время, затрачиваемое на измерение дальности (квазидальности), равно 1 с, то
пренебрежение изменением
что соответствует абсолютному расхождению 0,1 Гц. В этом
случае шкалы времени потребителя и ИСЗ перемещаются друг относительно друга на
1 не за 1 с, что соответствует изменению дальности со скоростью 0,3 м/с. Если
время, затрачиваемое на измерение дальности (квазидальности), равно 1 с, то
пренебрежение изменением  приведет к погрешности 0,3 м, что намного меньше погрешностей, обусловленных другими причинами (изменчивость условий
распространения радиоволн, инструментальные ошибки, влияние помех и др.). Если
же измеряемым параметром является скорость, то при тех же условиях погрешность
измерения радиальной скорости составит 0,3 м/с, что существенно превышает
допустимую погрешность измерения скорости.
приведет к погрешности 0,3 м, что намного меньше погрешностей, обусловленных другими причинами (изменчивость условий
распространения радиоволн, инструментальные ошибки, влияние помех и др.). Если
же измеряемым параметром является скорость, то при тех же условиях погрешность
измерения радиальной скорости составит 0,3 м/с, что существенно превышает
допустимую погрешность измерения скорости.
С учетом изложенного после
дифференцирования выражения (11.5) получим:
11.3. Принципы построения аппаратуры
потребителей спутниковой радионавигационной системы второго поколения GPS
Основные задачи, решаемые
аппаратурой потребителя. К числу потребителей СРНС второго поколения относятся
наземные объекты (подвижные и неподвижные), ЛA (высокодинамичные и низкодинамичные) и др. В зависимости от
типа потребителя требования к точностным характеристикам, числу измеряемых
координат и составляющих скорости, допустимому времени вхождения в синхронизм,
массогабаритным показателям и стоимости аппаратуры потребителя колеблются в
широких пределах. Для наземных и морских объектов достаточно ограничиться
измерением двух координат и двух составляющих скорости. Для ЛА число измеряемых
координат и составляющих скорости возрастает до трех. Поэтому номенклатура
модификаций бортовой аппаратуры весьма обширна.
При рассмотрении задач, решаемых
аппаратурой потребителя, и принципов ее построения будем ориентироваться на
технические характеристики системы GPS.
С борта каждого ИСЗ системы GPS непрерывно излучаются два взаимно когерентных
фазоманипулированных колебания на несущих частотах 1 575,42 и 1 227,6 МГц.
Использование двух несущих
Основными задачами, решаемыми
аппаратурой потребителя, являются:
·
выбор рабочего
созвездия ИСЗ;
·
поиск и опознавание
навигационных сигналов ИСЗ;
·
введение в
синхронизм систем слежения по времени запаздывания и фазе несущей частоты
дальномерных сигналов;
·
измерение времени
запаздывания и допплеровского сдвига частоты;
·
выделение и
расшифровка содержания навигационного (информационного) сообщения;
·
расчет координат ИСЗ
на момент навигационных измерений;
·
решение
навигационной задачи (определение координат и составляющих вектора скорости
потребителя, поправок к сдвигу шкал времени и частот);
·
отображение
вычисленных данных на информационном табло.
Упрощенная структурная схема
аппаратуры потребителя представлена на рис. 11.6. Она включает антенное,
приемное и вычислительное устройства, а также пульт управления и индикации.
Антенное устройство состоит из
антенны, ВЧ блока и блока управления ДН антенны. Оно обеспечивает прием,
предварительную частотную селекцию и усиление сигналов. ДН антенны в простейшем
случае близка к полусфере. Для потребителей, к качественным показателям
которых предъявляются особенно высокие требования, применяют антенны с управляемой
ДН. Когда одна из антенн формирует ДН в направлении ИСЗ, расположенного в
зените, а другие — в направлениях ИСЗ, находящихся на малых углах возвышения,
используются антенные блоки.
Приемное устройство выполняет
функции супергетеродинного приемника, а также осуществляет первичную обработку
сигналов. Гетеродинные частоты формируются из колебаний опорного генератора с
помощью синтезатора частот. С усилителя промежуточной частоты (УПЧ) сигналы
поступают на блоки поиска (по времени запаздывания и частоте) и измерения.
После завершения
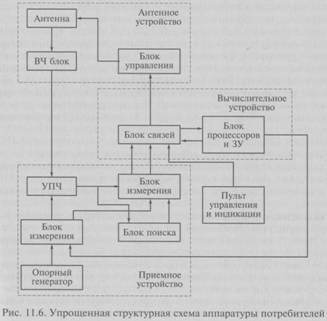 поиска в блоке измерения происходит захват сигналов
системами автоматической подстройки частоты (АПЧ), фазы (ФАПЧ) и времени
(АПВ). По завершении переходных процессов в следящих системах вырабатываемые в
блоке измерения значения РНП (квазидальности, квазискорости), а также код
данных Di(t) поступают на вычислительное устройство.
поиска в блоке измерения происходит захват сигналов
системами автоматической подстройки частоты (АПЧ), фазы (ФАПЧ) и времени
(АПВ). По завершении переходных процессов в следящих системах вырабатываемые в
блоке измерения значения РНП (квазидальности, квазискорости), а также код
данных Di(t) поступают на вычислительное устройство.
Вычислительное устройство содержит
блок связей и собственно вычислитель, который на рис. 11.6 упрощенно
представлен в виде блока процессоров и запоминающих устройств (ЗУ). Основой
вычислителя являются микропроцессоры, дополненные модулями памяти. В
зависимости от модификации аппаратуры в вычислитель обычно входит от одного др.
четырех микропроцессоров.
Пульт управления и индикации
содержит клавиатуру управления и индикационное табло, на котором по желанию
оператора могут отображаться измеряемые координаты, составляющие вектора
скорости, результаты расчетов сервисных задач (расчетное время прибытия в пункт
назначения, отклонения от заданного маршрута и т.п.), результаты тестовой
проверки отдельных блоков и всей аппаратуры в целом.
Модификации аппаратуры потребителей. Можно выделить три основные модификации
аппаратуры потребителей. Аппаратура первого класса предназначена для быстрых
высокоточных навигационных определений координат места и скорости, а также поправок
времени высокодинамичных потребителей в условиях сложной помеховой обстановки.
Упрощенная структурная схема аппаратуры потребителей первого класса
представлена на рис. 11.7. В ее состав входит пятиканальный блок АПВ, АПЧ и
ФАПЧ. Четыре идентичных канала используются для слежения за несущими частотами
четырех ИСЗ  канал АПВ обеспечивает последовательное слежение за
задержками сигналов ВТ и ПТ на частотах I 227,6 и 1 575,42 МГц поочередно для
всех четырех ИСЗ.
канал АПВ обеспечивает последовательное слежение за
задержками сигналов ВТ и ПТ на частотах I 227,6 и 1 575,42 МГц поочередно для
всех четырех ИСЗ.
Аппаратура потребителей второго
класса предназначена для низкодинамичных объектов. Это дает возможность
ограничиться последовательным слежением за несущей частотой четырех ИСЗ при
сохранении того же режима АПВ, как и в аппаратуре первого класса. Сокращение
числа систем АПЧ и ФАПЧ до одной заметно упрощает аппаратуру потребителей и
снижает ее стоимость.
Аппаратура потребителей третьего
класса представлена упрощенной структурной схемой рис. 11.8. Она удовлетворяет
требованию минимальной стоимости и рассчитана на прием лишь сигнала ПТ на
частоте 1 575,42 МГц, а также поочередное определение РНП по рабочим ИСЗ.
Сигнал ПТ по сравнению с сигналом ВТ имеет в десять раз большую длительность
элементарного символа кода, что сказывается на значении ошибки измерения квазидальности.
Кроме того, отказ от использования сигнала частоты
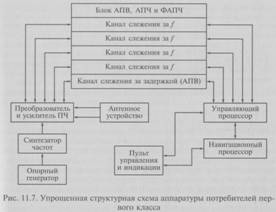 1 227,6 МГц не позволяет компенсировать ошибку, обусловленную
изменчивостью условий распространения радиоволн. Все это существенно снижает
точность навигационных измерений. Например, для неподвижного потребителя при
отсутствии организованных помех среднеквадратическая погрешность измерения
квазидальности составляет около 30 м, в то время как при тех же условиях
аппаратура первого и второго классов позволяет получить погрешность не более 5 м.
1 227,6 МГц не позволяет компенсировать ошибку, обусловленную
изменчивостью условий распространения радиоволн. Все это существенно снижает
точность навигационных измерений. Например, для неподвижного потребителя при
отсутствии организованных помех среднеквадратическая погрешность измерения
квазидальности составляет около 30 м, в то время как при тех же условиях
аппаратура первого и второго классов позволяет получить погрешность не более 5 м.
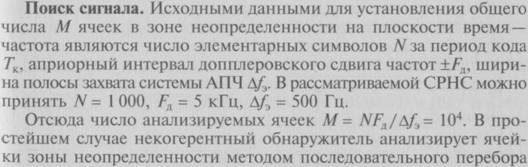 частоте и времени. По результатам накопления смеси сигнала
с шумом принимается решение о наличии или отсутствии сигнала в данной ячейке.
При отрицательном решении осуществляется переход в очередную ячейку, при
положительном замыкается цепь АПВ и АПЧ и контролируется наличие синхронизации
в следящих системах. Отсутствие синхронизации свидетельствует о ложном
частоте и времени. По результатам накопления смеси сигнала
с шумом принимается решение о наличии или отсутствии сигнала в данной ячейке.
При отрицательном решении осуществляется переход в очередную ячейку, при
положительном замыкается цепь АПВ и АПЧ и контролируется наличие синхронизации
в следящих системах. Отсутствие синхронизации свидетельствует о ложном
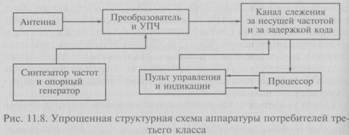 срабатывании устройства поиска. В этом случае поиск возобновляется.
При подтверждении наличия синхронизации поиск сигнала одного ИСЗ прекращается и
устройство поиска переключается в режим поиска сигнала следующего ИСЗ. Поиск
сигнала второго ИСЗ производится в существенно меньшей зоне неопределенности,
так как потребитель в результате дешифрации информационного сообщения Dj(t) первого ИСЗ располагает сведениями о координатах второго
ИСЗ на данный момент времени. Общее время, затрачиваемое на поиск сигналов
созвездия из четырех ИСЗ, составляет от единиц до десятков минут. После
завершения поиска осуществляется слежение за сигналами ИСЗ. Темп выдачи
измеряемых координат определяется классом потребителя. В аппаратуре первого
класса выдача координат обеспечивается непрерывно в реальном масштабе времени.
срабатывании устройства поиска. В этом случае поиск возобновляется.
При подтверждении наличия синхронизации поиск сигнала одного ИСЗ прекращается и
устройство поиска переключается в режим поиска сигнала следующего ИСЗ. Поиск
сигнала второго ИСЗ производится в существенно меньшей зоне неопределенности,
так как потребитель в результате дешифрации информационного сообщения Dj(t) первого ИСЗ располагает сведениями о координатах второго
ИСЗ на данный момент времени. Общее время, затрачиваемое на поиск сигналов
созвездия из четырех ИСЗ, составляет от единиц до десятков минут. После
завершения поиска осуществляется слежение за сигналами ИСЗ. Темп выдачи
измеряемых координат определяется классом потребителя. В аппаратуре первого
класса выдача координат обеспечивается непрерывно в реальном масштабе времени.
Упрощенная структурная схема
устройства поиска представлена на рис. 11.9. На выходе генератора кода по
команде блока управления поиском устанавливается код искомого ИСЗ. На выходе
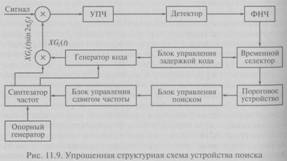
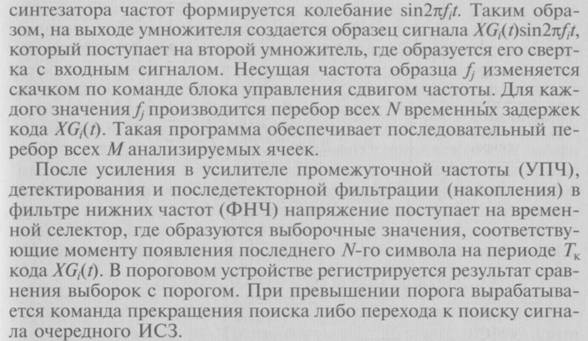
Схемы слежения за фазой и временем
запаздывания сигнала. Схемы слежения за
фазой и временем запаздывания сигнала обеспечивают поддержание синхронизма
между принимаемым сигналом и опорным образцом, форма которого является копией
полезного сигнала. Синхронизация по времени запаздывания производится с
помощью системы АПВ, а по фазе — системы ФАПЧ. Слежение осуществляется в
условиях, когда несущая частота в спектре сигнала отсутствует, так как код XGi(t) имеет практически одинаковое число символов со знаками «+»
и «-» на периоде Тк. Если синхронизация по фазе не может быть реализована
(режим поиска, работа в условиях сильных помех и др.), то применяют
синхронизацию по частоте (АПЧ). В этом случае системы синхронизации по несущей
и АПВ работают в некогерентном режиме, что приводит к увеличению ошибки
слежения, но позволяет сохранить состояние захвата в цепи слежения за несущей.
Система слежения за несущей и АПВ связаны, так как для работы системы АПВ
используется оценка фазы (частоты), а для работы ФАПЧ (АПЧ) — оценка задержки
огибающей (кода). Рассмотрим когерентную систему синхронизации. Структурная
схема когерентной АПВ и ФАПЧ представлена на рис. 11.10 (индекс i, показывающий
номер ИСЗ, опущен). С выхода УПЧ приемника сигнал  поступает на фазовый
дискриминатор, куда с другой стороны подается опорное напряжение
поступает на фазовый
дискриминатор, куда с другой стороны подается опорное напряжение  Фаза несущей частоты элементарных радиоимпульсов опорного
напряжения отличается от фазы импульсов сигнала на
Фаза несущей частоты элементарных радиоимпульсов опорного
напряжения отличается от фазы импульсов сигнала на  . Близость времен запаздывания сигнала и опорного
напряжения поддерживается системой АПВ. Фазовый дискриминатор имеет два
канала, отличающиеся лишь тем, что их опорные напряжения сдвинуты по фазе на
. Близость времен запаздывания сигнала и опорного
напряжения поддерживается системой АПВ. Фазовый дискриминатор имеет два
канала, отличающиеся лишь тем, что их опорные напряжения сдвинуты по фазе на  , т.е. находятся в квадратуре. Каждый из каналов
, т.е. находятся в квадратуре. Каждый из каналов
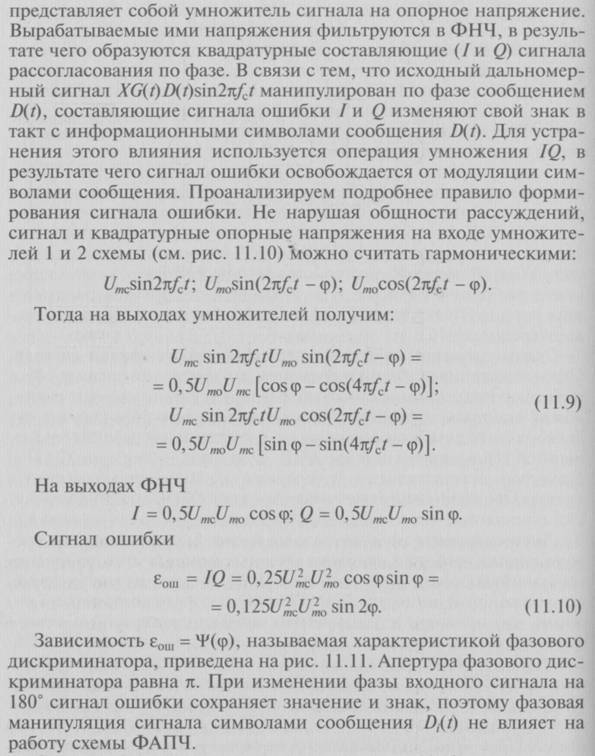
С выхода фазового дискриминатора
(см. рис. 11.10) сигнал ошибки поступает на петлевой фильтр, содержащий одно
или несколько интегрирующих звеньев и корректирующие цепи. Тип фильтра определяет
порядок астатизма системы ФАПЧ. Имея в виду, что следующим звеном системы
является генератор, управляемый напряжением (ГУН), который, в свою очередь,
является интегрирующим звеном в системе ФАПЧ, число интеграторов в петлевом
фильтре обычно не превышает двух. Наличие трех интеграторов в системе ФАПЧ
обеспечивает нулевые динамические погрешности
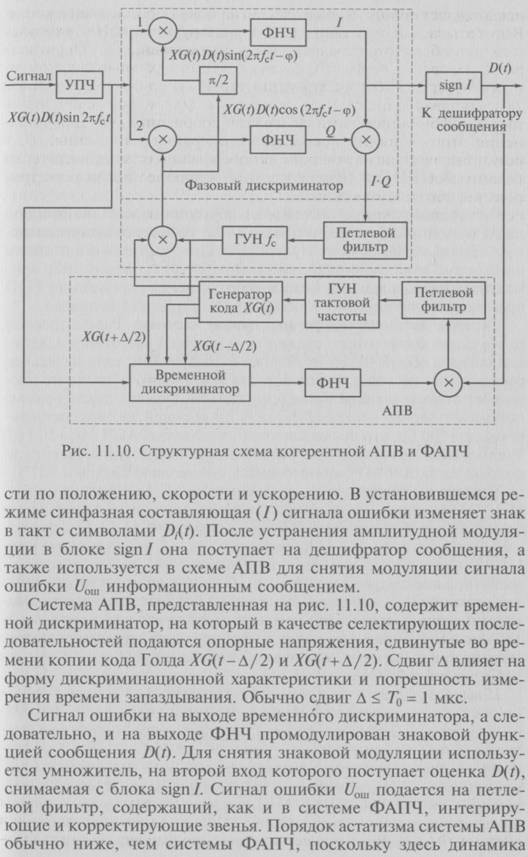
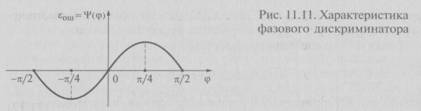
может быть учтена пересчетом
допплеровского сдвига частоты из системы ФАПЧ. Генератор кода XG(t) построен на двух регистрах сдвига с обратными связями.
Проанализированная система синхронизации
представляет собой канал слежения за сигналом одного ИСЗ. Рабочее созвездие
содержит несколько ИСЗ, поэтому для решения навигационной задачи необходимо
иметь многоканальную аппаратуру слежения либо применять последовательный режим
работы, когда определение РНП производится поочередно по каждому ИСЗ рабочего
созвездия.
Система автоматической подстройки
частоты. Рассмотренная
ранее схема когерентного слежения за несущей частотой и задержкой сигнала
обеспечивает вхождение в синхронизм, если начальное расхождение несущих частот
сигнала и опорного образца не превышает полосы захвата  системы ФАПЧ. Обычно после режима поиска априорная
неопределенность по несущей частоте составляет около ±500 Гц, что превышает
полосу захвата ФАПЧ
системы ФАПЧ. Обычно после режима поиска априорная
неопределенность по несущей частоте составляет около ±500 Гц, что превышает
полосу захвата ФАПЧ 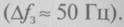 Уменьшение интервала неопределенности по несущей частоте до
полосы захвата ФАПЧ производится с помощью системы АПЧ.
Уменьшение интервала неопределенности по несущей частоте до
полосы захвата ФАПЧ производится с помощью системы АПЧ.
Упрощенная структурная схема
системы АПЧ приведена на рис. 11.12. Обведенные пунктирной линией блоки
выполняют те же функции, что и одноименные блоки в схеме рис. 11.10. Квадратурные
составляющие  образуются так же, как и в схеме рис. 11.10 (индекс к
указывает на принадлежность
образуются так же, как и в схеме рис. 11.10 (индекс к
указывает на принадлежность  к интервалу времени с порядковым номером
к). Отличие состоит лишь в том, что в установившемся режиме в системе ФАПЧ
сигнал и опорные образцы отличаются фазой несущих колебаний, в то время как в
системе АПЧ — еще и по частоте (наличие допплеровского сдвига частоты Fд в квадратурных опорных колебаниях).
к интервалу времени с порядковым номером
к). Отличие состоит лишь в том, что в установившемся режиме в системе ФАПЧ
сигнал и опорные образцы отличаются фазой несущих колебаний, в то время как в
системе АПЧ — еще и по частоте (наличие допплеровского сдвига частоты Fд в квадратурных опорных колебаниях).
Сигнал ошибки в системе АПЧ
образуется по правилу

где квадратурные составляющие  запаздывают
относительно на время Т.
запаздывают
относительно на время Т.
Не останавливаясь на вопросах
технической реализации правила (11.11), рассмотрим его физический смысл.
Прежде всего, докажем, что сигнал ошибки (см. формулу (11.11)) пропорционален
допплеровскому сдвигу частоты Fд. Не нарушая общности рассуждений, сигнал
и квадратурные опорные напряжения на входе
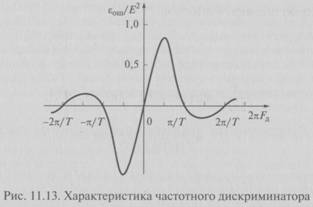 неопределенности по
частоте в устройстве поиска должен быть не более 500 Гц.
неопределенности по
частоте в устройстве поиска должен быть не более 500 Гц.
Возвращаясь к рассмотрению схемы
АПЧ, представленной на рис. 11.12, заметим, что порядок астатизма системы АПЧ
полностью зависит от построения петлевого фильтра. Действительно, если
исключить петлевой фильтр из структуры системы АПЧ, то сигнал ошибки  воздействуя на ГУН несущей, приводит к изменению частоты
ГУН в сторону уменьшения Fa, что в свою очередь
снижает и т.д. до тех пор, пока процесс подстройки не установится.
Установившийся режим будет соответствовать некоторому постоянному Fд т.е. система АПЧ окажется статической. Поэтому введение
петлевого фильтра первого порядка астатизма позволяет устранить систематическую
ошибку по частоте Fд. В схемах АПЧ системы GPS порядок астатизма петлевого фильтра обычно не превышает
двух.
воздействуя на ГУН несущей, приводит к изменению частоты
ГУН в сторону уменьшения Fa, что в свою очередь
снижает и т.д. до тех пор, пока процесс подстройки не установится.
Установившийся режим будет соответствовать некоторому постоянному Fд т.е. система АПЧ окажется статической. Поэтому введение
петлевого фильтра первого порядка астатизма позволяет устранить систематическую
ошибку по частоте Fд. В схемах АПЧ системы GPS порядок астатизма петлевого фильтра обычно не превышает
двух.
При анализе правила формирования
сигнала ошибки предполагалось, что сигнал и опорное напряжение имеют вид
гармонических колебаний. На самом же деле и сигнал, и опорные колебания
манипулированы по фазе кодом XG(t). Для приведения в соответствие
опорного колебания, вырабатываемого ГУН несущей, с фазоманипулированным
сигналом в схеме рис. 11.12 используется умножитель 3, осуществляющий фазовую
манипуляцию опорного колебания. Модулирующая функция XG(t) должна совпадать по времени запаздывания с кодом входного
сигнала  . Обеспечение такого
синхронизма по коду осуществляется системой АПВ. Система АПВ в данном случае
должна быть некогерентной, так как система АПЧ не обеспечивает в отличие от
ФАПЧ получения когерентного опорного колебания.
. Обеспечение такого
синхронизма по коду осуществляется системой АПВ. Система АПВ в данном случае
должна быть некогерентной, так как система АПЧ не обеспечивает в отличие от
ФАПЧ получения когерентного опорного колебания.
В заключение отметим еще одну
особенность правила (11.11) формирования сигнала ошибки , а именно: независимость сигнала ошибки от изменения фазы
несущей сигнала на 180°. Действительно, при сдвиге фазы несущей частоты
входного сигнала на 180° знаки квадратурных выборок  , так же как и
, так же как и  одновременно изменяются на обратные. Это, как следует из правила
(11.11), никак не влияет на
одновременно изменяются на обратные. Это, как следует из правила
(11.11), никак не влияет на  . Таким образом, наличие модуляции
дальномерного сигнала символами +1 сообщения Di(t) не влияет на работу рассмотренной системы
АПЧ.
. Таким образом, наличие модуляции
дальномерного сигнала символами +1 сообщения Di(t) не влияет на работу рассмотренной системы
АПЧ.
11.4. Спутниковая радионавигационная
система
ГЛОНАСС
В структуру спутниковой системы
ГЛОНАСС входят:
·
орбитальная
группировка (навигационные ИСЗ);
·
наземные средства
управления, слежения и контроля;
·
навигационная
аппаратура потребителей;
·
средства
развертывания и восполнения системы (космодром).
Орбитальной группировкой считается
та рабочая группа спутников, которая используется в конкретном навигационном
сеансе, являясь частью всей сети ИСЗ. Вся сеть ИСЗ системы ГЛОНАСС
характеризуется следующими параметрами: тип орбиты — круговая, высота 19 100 км, период обращения 11 ч 15 мин, наклонение плоскости орбиты 68,8°. После полного развертывания
системы 24 ИСЗ будут размещены на трех орбитах, сдвинутых по экватору на 120°,
по восемь спутников на каждой из них.
Способ разделения сигналов,
излучаемых спутниками системы ГЛОНАСС, является частотным. Сигналы спутников
идентифицируются по значению номинала их несущей частоты, лежащей в 
Каждый ИСЗ системы ГЛОНАСС излучает
сигналы в обоих диапазонах для реализации двухчастотного способа исключения
ионосферной погрешности измерений навигационных параметров. Для когерентности
этих сигналов они формируются от общего эталонного генератора при соблюдении
отношения рабочих частот 
Навигационное сообщение передается
со скоростью 50 символов в секунду. Применяется фазовая манипуляция несущей
даль- номерным псевдошумовым кодом, период повторения которого составляет 1 мс
при символьной частоте 511 кГц, так что за один период повторения формируется
511 символов.
Точность в системе ГЛОНАСС имеет
тот же уровень, что и в системе GPS. Обе эти системы рассматриваются в
настоящее время как содействующие друг другу. Как уже подчеркивалось,
увеличение числа обрабатываемых спутниковых сигналов увеличивает точность
местоопределения, так что очевидна выгода от совместного использования обоих
спутниковых созвездий. Кроме того, не редки случаи, когда некоторые спутники
над горизонтом заслонены (например, крылом самолета), так что общее число доступных
дальномерных сигналов только системы GPS или только ГЛОНАСС
недостаточно для местоопределения. Большое число моделей приемников,
представленных на рынке или планируемых к разработке, пригодны к совместной
обработке сигналов обеих систем.
11.5. Дифференциальный режим СРНС
Несмотря на достаточно высокую
точность СРНС развернулись работы, направленные на повышение точности и
устойчивости функционирования этих систем. Одно из этих направлений связано с
вводом дифференциального режима (ДР) — режима дифференциальных навигационных
определений. Внимание кДР, прежде всего, связано с необходимостью обеспечения
решения задач, требующих точностей выше 10 м.
В основе ДР лежит формирование
разности отсчетов, что и придало методу название «дифференциальный». Эта
дифференциальная подсистема (ДПС) не влияет на функционирование системы в
основном, стандартном режиме, но предоставляет потребителю возможность перейти
при необходимости на работу в ДР.
Структура ДПС включает средства
наземной контрольно-корректирующей станции (ККС) и дополнительные устройства потребителя.
На ККС размещена высокоточная
аппаратура потребителя, а также формирователь и передатчик корректирующей
информации (КИ).
На борту потребителя размещается
аппаратура приема КИ и устройство ввода КИ в стандартную аппаратуру
потребителя. Антенна АП, размещенная на ККС, привязывается на местности с
геодезической точностью. В ДР на борту потребителя результаты определений в
стандартном режиме будут автоматически корректироваться с помощью переданных с
ККС поправок. Поскольку ККС имеет ограниченную зону действия, на обеспечиваемой
территории размещается ряд таких станций, каждой из которых потребитель
пользуется в зоне уверенной передачи ею КИ.
Повышение точности определения
координат потребителя в дифференциальном режиме основано на исключении
сильнокоррелированных составляющих погрешностей спутниковых навигационных
определений. Такие составляющие обусловлены проявлением эфемероидных
погрешностей навигационного космического аппарата (НКА), уходом их шкал времени
и влиянием распространения сигналов в ионосфере и тропосфере [12].
Эффект от применения ДР будет
зависеть от степени пространственной и временной корреляций погрешностей, т.е.
от того, насколько одинаковыми окажутся погрешности на ККС и в точке
расположения потребителя в моменты проведения навигационных определений. При
сильной корреляции систематическая часть погрешности будет исключаться
практически полностью.
Удаление потребителя от ККС
приводит к пространственной декорреляции погрешностей. Это является одной из
причин ограничения дальности действия ККС. Обычно считается, что использование
ДР эффективно в радиусе 500 км от ККС.
Временная декорреляция связана с
несовпадением моментов формирования КИ на ККС и использования этой КИ на борту
потребителя. Допустимое снижение корреляции наряду с техническими возможностями
при реализации канала передачи КИ определяет период передачи дифференциальных
поправок.
Реализовано несколько вариантов ДР,
различающихся, главным образом, характером корректируемой в АП информации и
способом передачи КИ с ККС потребителям.
По характеру корректируемой
информации основными являются метод коррекции координат и метод коррекции навигационного
параметра.
Метод коррекции координат. Этот метод предполагает, что корректирующая
информация формируется на ККС путем сравнения эталонных координат с
координатами, вычисленными в результате стандартного навигационного сеанса,
проводимого на ККС с помощью АП наивысшего класса точности. Полученные дифференциальные
поправки передаются в составе КИ потребителю. Алгоритм может быть записан в
виде: 

Метод коррекции координат
сравнительно прост, так как не затрагивает основного алгоритма навигационных
определения потребителя. Однако поправки, вычисляемые на ККС, относятся к
оптимальному для нее созвездию навигационных спутников. При этом потребители,
желающие скорректировать свои координаты, должны использовать то же самое
созвездие. Но по мере удаления потребителя от ККС созвездие, оптимальное для
нее, перестает быть таковым для потребителя, а на определенных расстояниях
некоторые НКА из него вообще могут стать невидимыми для потребителя.
Метод коррекции навигационных
параметров. Этот метод предполагает, что потребителю передается набор поправок
к результатам измерений по всем НКА, наблюдаемых на ККС. Для этого на ККС
измеряют псевдодальности до всех радиовидимых НКА и одновременно вычисляют эти
псевдодальности по эталонным координатам. Разности расчетных и измеренных
значений передаются в составе КИ потребителям. Каждый потребитель выбирает оптимальное
для него созвездие, корректирует измеренные им псевдодальности с помощью
полученной КИ и по скорректированным результатам измерений решает
навигационную задачу.
Данный метод более универсален и
более точен, чем метод коррекции координат, однако требует существенно большего
объема КИ.
Возможности практической реализации
ДР определяются возможностями передачи КИ от ККС к АП. Повышение требований
гражданских потребителей вызвало бурное развитие функциональных дополнений
СРНС, одним из основных назначений которых является реализация
дифференциального режима.
11.6. Функциональные дополнения
спутниковых радионавигационных систем
Возможности СРНС второго поколения
в части координатометрии и временной привязки, наличие открытых каналов, предоставляемых
любым пользователям, непрерывное снижение массогабаритных характеристик и
стоимости АП, связанное с достижениями интегральной микроэлектроники (коммерческий
вариант АП содержит две сверхбольших интегральных схемы), привели к созданию
новых информационных технологий, используемых в самых разнообразных областях
науки и техники (астрономия и геодезия, мобильная связь и коммерческий
транспорт, строительное дело и добыча полезных ископаемых). Мы остановимся на
тех системах, в которых СРНС играют центральную роль, являясь основным
источником информации.
Для улучшения точностных
характеристик уже развернутых СРНС были предложены и создаются функциональные
дополнения (ФД) этих систем. В англоязычной литературе ФД соответствует
аббревиатура BAS (Based Augmentation System). На ФД, как правило,
возлагаются следующие задачи:
·
контроль за
состоянием навигационного поля и информирование о его характеристиках
пользователей, включая информацию по каждому спутнику, входящему в орбитальную
группировку (ОрГ);
·
выработка
дифференциальных поправок, позволяющих повысить точность координатометрии и
временной привязки;
·
увеличение числа
навигационных точек за счет использования либо ретрансляторов сигналов штатных
НКА СРНС, либо дополнительных источников навигационной информации.
Классификация ФД может быть
осуществлена либо по расположению передающих станций, либо по протяженности
рабочих зон, обслуживаемых данным ФД. По первому признаку выделяют спутниковые
ФД (СФД или SBAS), авиационные ФД (АФД или ABAS) и наземные ФД (ЗФД
или GBAS).
По второму признаку ФД
подразделяются на широкозонные (ШФД), региональные (РФД) и локальные (ЛФД).
Спутниковые ФД являются широкозонными,
и их принято дополнительно классифицировать по типу орбит НКА. Различают
геостационарные, высокоэллиптические и средневысотные круговые СФД.
Спутниковые ФД предназначены для
передачи поправок пользователям уже развернутых СРНС (ГЛОНАСС/GPS). Кроме того, каждый
спутник СФД является источником навигационного сигнала, привязанного к
системному времени СРНС.
В настоящее время разрабатываются
четыре системы СФД, использующие геостационарные спутники.
Северо-Американская система WAAS (Wide Area Augmentation System), создаваемая по
заказу федеральной авиационной администрации США, ориентирована на повышение
целостности, доступности и точности до уровня, удовлетворяющего требованиям ICAO для всех фаз полета вплоть до захода на посадку ВС по
категории I (до высоты 60 м) в пределах
Северо-Американского континента. Европейское
сообщество разрабатывает СФД EGNOS (European Geostationary Navigation Overlay System), являющееся первым
этапом на пути развертывания Европейской СРНС GALILEO, которая кратко
описана в гл. 14. Орбитальная группировка системы EGNOS включает два спутника 1NMARSAT-3 и геостационарный спутник Европейского космического
агентства ARTEMIS. Зоной обслуживания системы является большинство европейских
государств, Северное море, восточная часть Атлантического океана.
Японская система MSAS (Multifunctional Satellite-based Augmentation System) предполагает
использование многофункциональных транспортных космических аппаратов (МТКА),
управляемых по трем осям ориентации, со сроком существования в системе не менее
10 лет. МТКА будут помимо навигационных функций обеспечивать метеорологические
функции, передачу данных и речевую связь. Навигационные функции МТКА состоят в
передаче навигационного сигнала, подобного сигналу GPS, корректирующей
информации и информации о целостности системы. Зона обслуживания системой MSAS охватывает воздушные трассы северной части Тихого океана
между Азией и Америкой и, естественно, регион Японских островов.
Индия разрабатывает СФД GAGAN, аналогичную по
функциональным возможностям и техническим характеристикам системам WAAS, EGNOS и MAAS. Ожидаемая точность с
использованием СФД 2,5...5,0 м (СКО) существенно выше, чем номинальная
точность местоопределения по системам GPS и ГЛОНАСС.
Учитывая, что перечисленные выше
СФД не охватывают большую часть территории России, ракетно-космической
корпорацией «Энергия» и Центром управления полетами разработан проект СФД,
ориентированного на высокоэллиптические орбиты НКА, позволяющего обеспечить
поправками и сигналами целостности всю территорию России и прилегающее
акватории.
Наземные ФД подразделяются на
региональные и локальные. Региональные ФД, как это и следует из названия, имеют
своими задачами навигационное обеспечение отдельных регионов с диаметром
рабочей зоны от 400... 500 до 2 000 км. Например, РФД Starfix имеет дальность действия свыше 2 000 км.
Региональные ФД системы Skyfix фирмы Racal Survey Limited обслуживает большинство районов, в которых ведется добыча
природных ресурсов. Передача дифференциальных поправок, как и в системе Starfix, ведется с помощью геостационарных НКА INMARSAT. Принимая навигационные сигналы GPS и используя несколько ККС, система Skyfix обеспечивает точность на уровне 1 м. Планируется создание сети из примерно 60 ККС, расположенных по всему миру.
Интересное РФД системы Eurofix разработано российскими и европейскими специалистами. В
системе Eurofix используются передающие станции радиосистем дальней
навигации наземного базирования Лоран-С/Чайка для передачи корректирующей информации
систем ГЛОНАСС/GPS (дифференциальные поправки и сигналы контроля целостности).
Такое решение, основанное на использовании уже существующей структуры, снижает
стоимость проекта. Энергетический потенциал и частотный диапазон работы систем
Лоран-С/Чайка обеспечивает охват большой площади, доступность канала передачи
данных в местах со сложным рельефом (города, горы).
Интегрированная аппаратура
пользователей системы Eurofix обеспечивает
местоопределение как по системам ГЛОНАСС/GPS, так и по системам Лоран-С/Чайка, что повышает надежность
решения навигационных задач.
Локальные функциональные дополнения
(ЛФД) характеризуются значительно меньшей зоной охвата, чем РФД (максимальная
дальность действия 50... 500 км). По своему назначению ЛФД, содержащие, как
правило, одну локальную ККС (ЛККС), подразделяются на морские, авиационные и
предназначенные для геодезических, землемерных и других специальных работ.
Важным элементом ЛФД является канал передачи потребителю корректирующей
информации. В морских ЛФД для передачи данных используют всенаправленные
средневолновые (от 283,5 до 325,0 кГц) радиомаяки с дальностью действия до 500 км, размещенные по побережью практически всюду, где имеется интенсивное судоходство.
Для передачи используется
спектрально эффективная фазовая манипуляция с минимальным фазовым сдвигом,
позволяющая избежать создания помех для потребителей, использующих
традиционные методы пеленгации.
Благодаря тому, что антенны
радиомаяков, как правило, ненаправленные, имеется возможность использовать
данную сеть ЛФД в прибрежных районах земли и в воздухе.
Авиационные ЛФД позволяют решать
задачи, связанные с инструментальным заходом ВС на посадку в сложных метеоусловиях
на расстояниях порядка 50 км от взлетно-посадочной полосы, дают возможность
оборудовать местные авиалинии. Для передачи корректирующей информации
используется УКВ диапазон (112...118 МГц).
Рассматриваются варианты построения
Л ККС с использованием РСБН, что дает возможность совместить функции двух систем
(ГЛОНАСС/GPS и РСБН) в одном аппаратурном комплексе.
Для проведения геодезических работ,
контроля геометрии крупных инженерных сооружений (мосты, высотные здания)
необходима точность взаимного позиционирования нескольких пунктов на уровне
единиц сантиметров и менее. На базе СРНС такую точность можно реализовать с
использованием фазовых измерений на несущей частоте и применением
дифференциальных методов местоопределения.
Часто используется несколько иная
классификация ФД [6]. В соответствии с ней выделяются следующие разновидности
функциональных дополнений:
·
дифференциальные
подсистемы (ДПС), подразделяемые в зависимости от зоны покрытия на
широкозонные, региональные и локальные;
·
псевдоспутники (ПС);
·
ретрансляторы
сигналов СРНС.
Дифференциальные подсистемы были
кратко описаны ранее. Надо заметить, что с использованием псевдоспутников также
создаются ДПС. Под псевдоспутником понимают комплекс технических средств,
расположенный в точно определенной точке земной поверхности и выполняющий
следующие функции:
формирование и излучение
дальномерных сигналов, соответствующих по структуре и несущим частотам
сигналам основной СРНС;
формирование КИ, включение ее в
состав навигационного сообщения и передача пользователям системы.
Введение ПС в состав рабочего
созвездия позволяет улучшить геометрию новой системы (ПС + НКА СРНС), что
приводит к уменьшению геометрического фактора, позволяет повысить надежность и
достоверность определений.
Количественные характеристики и
вопросы оптимизации сети ПС рассмотрены в монографии*, материалы которой были
использованы при написании данного подраздела.
Ретрансляторы сигналов СРНС
являются весьма перспективным видом ФД. В нем осуществляется прием сигналов
СРНС, их преобразование и излучение. Если координаты ретранслятора известны с
высокой точностью, то он выполняет функции ПС. Ретранслятор может
устанавливаться на объекте, координаты которого надо измерить
(внешнетраекторные измерения при испытании авиационной и ракетно-космической
техники). В этом случае обработка сигналов, принятых от навигационных
спутников, сводится к переносу спектра принятых сигналов на частоту связи с
контрольным пунктом (КП). Определение координат объекта осуществляется на КП
как в реальном времени, так и в режиме постобработки. Рассмотренный пример
иллюстрирует типичную информационно-управляющую систему с использованием
сигналов СРНС.
В зависимости от характера
управляемых объектов такие системы подразделяются на транспортные
информационно-управляющие системы (ТИУС, или ITS), аэронавигационные
системы автоматического зависимого наблюдения (АЗН, или ADS) (см. подразд. 10.7),
морские автоматические информационно-идентификационные системы (АИИС).
Указанные системы строятся по единому принципу, состоящему в том, что на
подвижном объекте устанавливается аппаратура, позволяющая определить координаты
и параметры движения объекта (АП СРНС), или ретранслятор для передачи принятых
на объекте сигналов рабочего созвездия СРНС. Данные навигационно-временного
определения или принятые сигналы СРНС совместно с другой информацией, характеризующей
состояние объекта, передаются в диспетчерские
(командно-управляющие) центры по
соответствующему радиоканалу. Типичным примером является широко
распространенная система ACARS (Airline Communication Addressing and Reporting System), установленная на
более чем 7 000 ВС.
Канал связи может работать в
диапазонах коротких, метровых и дециметровых волн при организации спутниковой
связи через систему INMARSAT. Кроме навигационной информации система обеспечивает передачу
речи и цифровых данных со скоростью 2 400 бит/с.
Дальнейшее развитие системы связано
с реализацией самоорганизующегося многостанционного доступа с временным разделением
каналов STOMA (Self-organizing Time Division Multiple Access). При этом каждый
пользователь системы на основании определенных приоритетов получает по запросу
временной интервал, в течение которого он передает свою информацию. Положение
временного интервала (слота) жестко синхронизировано по системному времени
СРНС. По данному принципу реализован вещательный режим автоматического зависимого
наблюдения (АЗН-В), в соответствии с которым сообщения, передаваемые с борта
каждого ВС, принимаются другими ВС и диспетчерскими пунктами, оборудованными
аппаратурой АЗН-В. Это позволяет организовать высокоэффективную систему
предупреждения столкновений в воздухе, повысить эффективность работы систем УВД
(см. под- разд. 10.7). С организацией и возможностями АИИС и ITS можно ознакомиться с помощью учебного пособия [6].
Контрольные вопросы
1.Перечислите недостатки СРНС
первого поколения.
2.Чем вызвана необходимость
применения в СРНС сигналов двух частот?
3.Используя выражения (11.2) и
(11.3), а также рис. 11.3, поясните интегральный допплеровский метод
определения координат.
4.Какие методы измерений РНП можно
применять в СРНС второго поколения? Как влияет выбор метода измерений на
требования к бортовому эталону частоты?
5.Поясните целесообразность
применения в СРНС второго поколения сложных сигналов с большой базой.
6.Перечислите основные задачи,
решаемые аппаратурой потребителей СРНС второго поколения.
7.Используя рис. 11.9, поясните
процедуру поиска сигналов рабочего созвездия ИСЗ.
8.Фазовый дискриминатор в схеме
рис. 11.10 вырабатывает сигнал ошибки, значение и знак которого не зависят от
изменения фазы входного сигнала на 180°. Докажите справедливость этого
утверждения.
9.Поясните правило формирования
сигнала ошибки (11.11) для схемы, представленной на рис. 11.12.
10.Поясните принцип организации
дифференциального режима СРНС.
СИСТЕМЫ РАДИОПРОТИВОДЕЙСТВИЯ
12.1. Радиопротиводействие и контррадиопротиводействие.
Основные понятия и определения
Под радиопротиводействием (РПД)
понимают комплекс методов и средств, направленных на снижение эффективности
радиоэлектронных средств (РЭС), используемых противником.
Контррадиопротиводействие (КРП)
охватывает методы и средства защиты от воздействия системы РПД противника.
Эффективность РПД и КРП зависит от
знания параметров сигналов подавляемых РЭС при РПД и помех при КРП. Поэтому
важным элементом в системе радиовооружения являются средства радиоразведки
(РР), позволяющие оценить параметры РТС противника как на этапе активного
взаимодействия (в боевой обстановке), так и предварительно.
Взаимодействие средств РПД и КРП
часто объединяется понятием радиоэлектронной борьбы (РЭБ), включающим в себя
радиоразведку и постановку разнообразных активных и пассивных помех,
затрудняющих или даже исключающих возможность использования определенных РЭС.
Применительно к радиолокации
основной целью РПД является снижение возможности получения достоверной информации
от РЛС, т.е. снижение дальности обнаружения защищаемых объектов, точности
измерения их координат, вероятности идентификации целей. В идеале система РПД
должна исключить возможность выполнения РЛС ее основных функций.
Меры КРП направлены на снижение
эффективности работы системы РПД противника. К ним относятся, прежде всего,
рациональный выбор параметров излучаемых сигналов РЛС, алгоритмов их обработки
и использование режимов обзора, затрудняющих работу разведывательных приемников
противника.
Различают активное и пассивное РПД.
При активном РПД осуществляется разведка РЭС противника, т.е. определение параметров
излучаемых сигналов с последующим созданием активной помехи, направленной в
сторону РЭС противника и имеющей такую структуру, которая в наибольшей степени
нарушает работу РЭС.
Пассивное РПД обеспечивает
маскировку защищаемого объекта от радиолокации противника выбором формы и
покрытия объекта с целью резкого уменьшения его ЭПР (технология Stealth) или маскировку объектов с помощью дипольных или уголковых
отражателей, затрудняющих обнаружение объектов или делающих невозможным
точное определение их координат. К пассивному РПД относится создание уводящих
«ложных целей».
Радиоэлектронная борьба является
частью общей проблемы защиты РЭС от помех, которые могут не только создаваться
противником в ходе РПД, но и возникать другим путем. В отличие от
преднамеренных помех, т.е. специально создаваемых в ходе РПД, существуют и
непреднамеренные помехи, к которым в радиолокации в первую очередь относят
отражения от местных предметов, метеообразований, подстилающей поверхности. В
радионавигации к таким помехам могут быть отнесены отражения сигнала от ионосферных
слоев при многолучевом распространении. Наконец, это могут быть помехи,
неумышленно создаваемые другими РЭС (в том числе и своими). Эта ситуация
особенно ярко проявляется в случае, когда большое число РЭС располагается в
тесной близости друг к другу.
Работа РЭС в условиях воздействия
различных источников помех, в том числе и от других РЭС, является предметом
рассмотрения недавно выделившейся ветви радиоэлектроники, называющейся
электромагнитной совместимостью (ЭМС). Предметом исследования в этой области
является взаимодействие электромагнитных полей, создаваемых различными РЭС, с
целью нахождения рационального расположения взаимодействующих источников
излучения и выбора параметров сигналов и способов их обработки, минимизирующих
взаимные помехи различных РЭС*.
Конечно, проблемы ЭМС тесно
соприкасаются с проблемами РЭБ, однако последние имеют свою специфику,
обусловленную преднамеренным созданием помех, выбором их характеристик и
ответным выбором мер контрпротиводействия. Дальнейшее рассмотрение относится к
анализу работы РЛС в условиях воздействия маскирующих и имитирующих помех.
Имитирующие помехи создают эффект
ложной цели, затрудняющий получение достоверной информации об истинных целях.
Для их создания необходима достаточно точная информация о параметрах
имитируемых сигналов, получаемая с помощью специальных разведывательных
приемников, которые рассмотрены в следующем подразделе. Остановимся более
подробно на воздействии маскирующих помех.
Маскирующие помехи создают условия,
при которых трудно выделить полезный сигнал, отраженный целью на фоне помех. По
своему характеру маскирующие помехи могут быть случайными (шумовыми) или
детерминированными, непрерывными во времени или импульсными. Структура
маскирующих помех выбирается таким образом, чтобы в наибольшей степени
затруднить извлечение полезной информации из радиолокационного сигнала.
Активные помехи проявляют себя на всех этапах обработки радиолокационного
сигнала. При этом информационный ущерб проявляется в уменьшении вероятности
обнаружения полезных сигналов, снижении точности измерения параметров, а иногда
в полном подавлении помехой сигналов в приемном тракте.
Активные помехи создаются с помощью
передатчиков помех, антенны которых излучают помехи в полосе частот приемника
РЛС (прицельные помехи) или в широкой полосе (заградительные помехи),
перекрывающей диапазон, в котором работают РЛС противника.
Средняя мощность прицельной помехи
может быть много меньше, чем заградительной, однако для ее создания необходимо
знать частоту настройки и величину полосы пропускания приемника
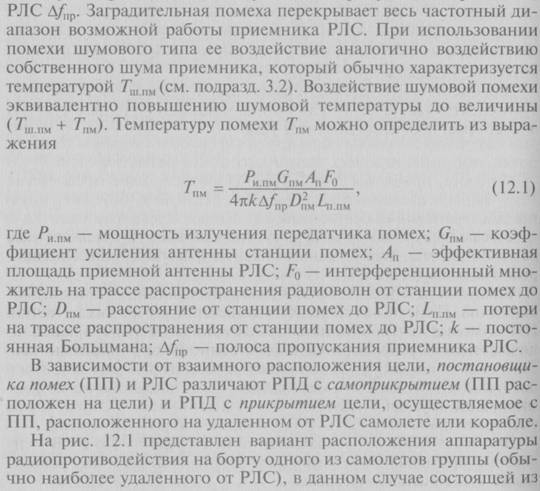
двух самолетов. Целью для РЛС на
корабле является обычно ближайший самолет, расположенный на расстоянии  .. Расстояние до постановщика помех
.. Расстояние до постановщика помех  Аппаратура РПД состоит из приемника разведки с анализатором
принимаемых сигналов, блока управления, передатчика помех и двух антенн:
приемной А1 и передающей А2. Поляризация антенн может изменяться на основе
результатов анализа принимаемых сигналов с целью согласования поляризации
излучаемых антенной А2 помех с поляризацией антенны, подавляемой PЛC.
Аппаратура РПД состоит из приемника разведки с анализатором
принимаемых сигналов, блока управления, передатчика помех и двух антенн:
приемной А1 и передающей А2. Поляризация антенн может изменяться на основе
результатов анализа принимаемых сигналов с целью согласования поляризации
излучаемых антенной А2 помех с поляризацией антенны, подавляемой PЛC.
Для оценки интенсивности помех при
подавлении РЛС используют спектральную плотность потока мощности, создаваемую
ПП в месте расположения антенны РЛС: 
где  — ширина спектра помехи.
— ширина спектра помехи.
В реальных системах РПД могут быть
использованы различные режимы работы передатчика помех: непрерывный, квазинепрерывный
и импульсный.
Следует подчеркнуть разнообразие
применяемых помех шумового типа. Помехи в виде непосредственно излучаемых
антенной ПП шумовых колебаний, называемые прямошумовыми, в наибольшей степени
приближаются к собственному шуму приемников. Такая помеха может генерироваться
непосредственно в диапазоне работы РЛС специальным генератором СВЧ. Возможно
также формирование шумовых колебаний на низкой частоте с переносом спектра в
диапазон работы РЛС методом гетеродинирования.
Для создания шумовых колебаний
непосредственно в СВЧ диапазоне применяют газоразрядные лампы, магнетроны,
работающие в специальном режиме.
Наряду с прямошумовой помехой часто
используются высокочастотные колебания в требуемом диапазоне частот с
модуляцией шумом по амплитуде, частоте или фазе. При модуляции по частоте в
качестве генераторов обычно используются лампы обратной волны, позволяющие
обеспечить девиацию частоты до сотен мегагерц. Это открывает широкие
возможности генерирования помех, как заградительных, так и прицельных.
В передатчиках помех часто
предусматривается возможность их перестройки (скольжения) по частоте. При этом
создается помеха нестационарного типа, называемая скользящей, эффективность
которой в ряде случаев может быть весьма высокой.
Для иллюстрации приведем основные
параметры аппаратуры ПП, обнаруживающей и анализирующей сигналы непрерывные,
импульсные, с фазовым кодированием и перестройкой по частоте.
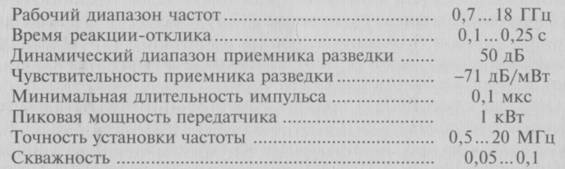 Передатчик помех генерирует соответствующую помеху, наносящую
наибольший информационный ущерб.
Передатчик помех генерирует соответствующую помеху, наносящую
наибольший информационный ущерб.
Оценим эффективность подавления РЛС
при различном расположении ПП относительно РЛС и цели.
Обращаясь к рис. 12.1, легко
понять, что для обнаружения цели с небольшой ЭПР (самолет) требуется
значительно большая энергия зондирующего сигнала PJ1C, чем для его обнаружения и анализа приемником разведки на
самолете ПП, даже при условии  Это следует из уравнений дальности для
линии связи (прохождение помехи или анализируемого сигнала) и уравнения
радиолокации (для отраженного целью сигнала РЛС). В первом случае дальность
обнаружения пропорциональна квадратному корню из энергии сигнала, а во втором
— корню четвертой степени.
Это следует из уравнений дальности для
линии связи (прохождение помехи или анализируемого сигнала) и уравнения
радиолокации (для отраженного целью сигнала РЛС). В первом случае дальность
обнаружения пропорциональна квадратному корню из энергии сигнала, а во втором
— корню четвертой степени.
Для оценки эффективности
воздействия помехи (информационного ущерба, наносимого помехой) вводят
коэффициент подавления сигнала помехой  , который зависит от параметров сигналов
РЛС и воздействующей помехи, а также взаимного положения РЛС, цели и ПП. В
основном коэффициент определяется отношением мощности помехи в полосе пропускания
приемника
, который зависит от параметров сигналов
РЛС и воздействующей помехи, а также взаимного положения РЛС, цели и ПП. В
основном коэффициент определяется отношением мощности помехи в полосе пропускания
приемника  и мощности сигнала Рс на входе приемника РЛС, т.е.
и мощности сигнала Рс на входе приемника РЛС, т.е. 

Рассмотрим сначала вариант РПД с
прикрытием цели сторонним ПП, представленный на рис. 12.1. На основе
упомянутых уравнений дальности (подробно рассмотренных в гл. 3) для линий
связи и радиолокации можно записать
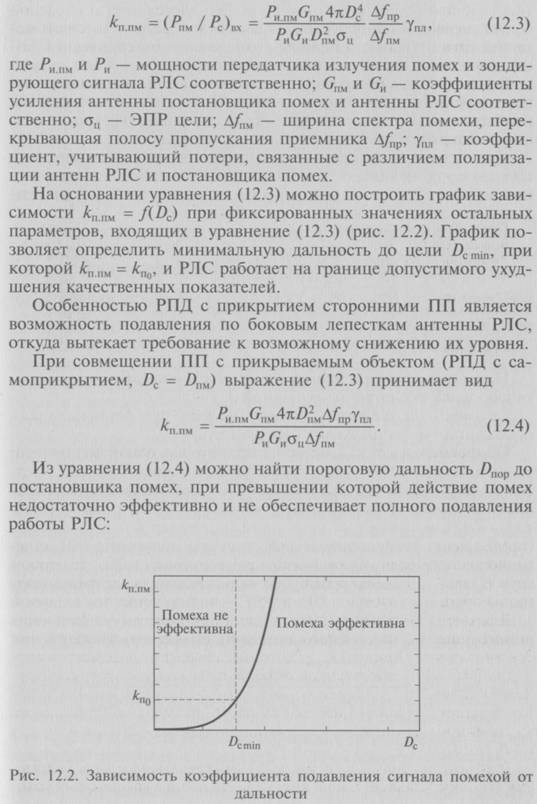
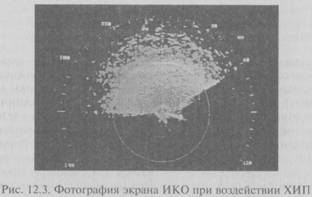
В связи с этим актуально применение
способов снижения ЭПР, рассмотренных в гл. 2, в том числе и технологии Stealth, обеспечивающей многократное уменьшение ЭПР кораблей,
самолетов и ракет.
В заключение следует остановиться
на хаотических импульсных помехах (ХИП), применение которых весьма эффективно
для подавления импульсных РЛС. ХИП представляет собой последовательность
радиоимпульсов с несущей частотой, равной или близкой к несущей частоте
подавляемой РЛС. Амплитуда, длительность и период повторения импульсов ХИП
могут изменяться случайным образом. ХИП могут быть когерентными и некогерентными.
Когерентные ХИП особенно опасны для РЛС с когерентной обработкой, поскольку
импульсы помехи могут накапливаться в когерентных накопителях РЛС, так же как
отраженные целью сигналы. Это приводит к недопустимому увеличению числа ложных
тревог и, естественно, к нарушению работы РЛС. Для иллюстрации на рис. 12.3
приведена фотография экрана И КО при воздействии ХИП. На рис. 12.3 видно, что
экран И КО покрыт множеством ложных отметок, похожих на отметки полезных целей,
и выделить последние становится практически невозможным.
12.2. Системы радиотехнической разведки
Системы радиотехнической разведки
(СРР) служат для сбора данных о параметрах радиоэлектронных систем противника.
Полученная информация оказывается полезной при разработке новых средств РПД и
совершенствовании уже имеющихся. Непосредственно в боевой обстановке СРР
позволяют на основе оценки параметров сигналов РТС противника выбрать наиболее
эффективный вид активной помехи.
Системы радиотехнической разведки,
установленные на наземных станциях, кораблях, самолетах, спутниках, осуществляют
перехват сигналов и измерение их параметров (рабочая частота, ширина спектра,
длительность и частота повторения импульсов, вид модуляции). Оценивается
мощность излучения, пространственные характеристики: ширина ДН, уровень
боковых лепестков.
Большинство из перечисленных задач
решается на основе обработки сигналов, записанных с выхода разведприемника в
условиях отсутствия дефицита времени и наличия мощных вычислительных средств.
На основе полученной информации формируются базы данных по РЭС противника, что
позволяет в боевой обстановке после идентификации PJIC, обычно по месту ее
установки (тип корабля, самолета), обеспечить эффективное РПД. Однако возможны
ситуации, когда оценку параметров подавляемой РЭС необходимо производить в
реальном масштабе времени.
При проектировании СРР необходимо
учитывать практически полное отсутствие априорной информации о сигналах,
которые надо обнаруживать и параметры которых желательно оценить.
Первой из задач, решаемых СРР,
является установление факта излучения и определение рабочей частоты и
направления на источник. Эта задача может решаться с использованием
параллельного или последовательного анализа просматриваемых областей спектра
и пространства. При параллельном анализе экономится время, но усложняется
структура СРР, при последовательном анализе упрощение СРР достигается за счет
увеличения времени анализа.
Основными элементами СРР являются:
·
антенные системы,
которые должны обеспечивать прием излучений с различной поляризацией, иметь
возможность перестройки по угловым координатам с регулировкой ширины ДН;
·
приемники различных
диапазонов с возможностью перестройки по частоте, сопрягаемые с компьютером;
·
вычислительный
комплекс с соответствующим программным обеспечением, решающий перечисленные
ранее задачи оценки параметров излучения РЭС противника.
К приемнику, с помощью которого
определяется частота перехватываемого излучения, предъявляются весьма жесткие
требования. Такие приемники должны работать в очень широком частотном
диапазоне. В современных СРР находят применение приемники, преобразующие
частоту принимаемого излучения в другую физическую величину, которую легче
идентифицировать и в последствии обрабатывать.
В качестве примера рассмотрим
акустооптический приемник на ячейке Брэгга и приемник со сжатием сигнала.
Схема оптической части приемника на
ячейке Брэгга приведена на рис. 12.4. В качестве материала в ячейке Брэгга
используется
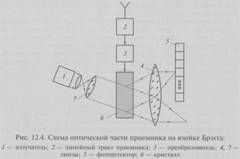 оптически прозрачный кристалл ниобата лития или диоксида теллура,
на одной из поверхностей которого находится пьезоэлектрический
преобразователь. При поступлении с выхода линейного тракта приемника 2 на
преобразователь 3 анализируемых сигналов в кристалле 6 возникают упругие
(акустические) волны. Бегущая акустическая волна создает переменный вдоль
направления распространения коэффициент преломления, формируя тем самым
бегущую дифракционную решетку. Кристалл освещается параллельным когерентным
лазерным пучком, формируемым излучателем 1 и линзой 7 и падающим под углом
Брэгга по отношению к направлению распространения акустической волны. В результате
взаимодействия с решеткой лазерный луч отклоняется на угол, пропорциональный
оптически прозрачный кристалл ниобата лития или диоксида теллура,
на одной из поверхностей которого находится пьезоэлектрический
преобразователь. При поступлении с выхода линейного тракта приемника 2 на
преобразователь 3 анализируемых сигналов в кристалле 6 возникают упругие
(акустические) волны. Бегущая акустическая волна создает переменный вдоль
направления распространения коэффициент преломления, формируя тем самым
бегущую дифракционную решетку. Кристалл освещается параллельным когерентным
лазерным пучком, формируемым излучателем 1 и линзой 7 и падающим под углом
Брэгга по отношению к направлению распространения акустической волны. В результате
взаимодействия с решеткой лазерный луч отклоняется на угол, пропорциональный  длина волны лазерного излучения; f— частота входного сигнала;
длина волны лазерного излучения; f— частота входного сигнала;  — скорость распространения звука в кристалле. Выходное
излучение фокусируется с помощью линзы 4 на поверхности фотодетектора матричного
типа 5, в качестве которого наиболее часто используются приборы с зарядовой
связью (ПЗС). Таким образом, частота входного сигнала определяет координату
возбужденного элемента фотодетектора, а энергия сигнала — фототок (заряд).
— скорость распространения звука в кристалле. Выходное
излучение фокусируется с помощью линзы 4 на поверхности фотодетектора матричного
типа 5, в качестве которого наиболее часто используются приборы с зарядовой
связью (ПЗС). Таким образом, частота входного сигнала определяет координату
возбужденного элемента фотодетектора, а энергия сигнала — фототок (заряд).
Приемник со сжатием обрабатываемого
сигнала работает по принципу превращения исходного гармонического сигнала в ЛЧМ
импульс и последующего его сжатия. Это достигается с помощью гетеродина с
перестройкой частоты по линейному закону. Если на входе приемника присутствуют
гармонические колебания разных частот, то соответствующие им ЛЧМ сигналы на
выходе смесителя в различное время попадают в полосу пропускания сжимающего
фильтра и отклики на них разделяются.
Обычно система радиоразведки вместе
с системой радиопротиводействия (РПД) образуют единый автоматизированный комплекс,
в котором данные радиоразведки используются для повышения эффективности
системы РПД. Структурная схема такого комплекса приведена на рис. 12.5. При
обнаружении сигнала на выходе приемника, фиксирующего наличие излучения (приемник
угрозы), осуществляется пеленгация выявленного источника и анализ его
характеристик (рабочая частота, период повторения).
Далее происходит сравнение данных
анализа с результатами, полученными ранее с целью выявления новых источников
излучения. Для каждого из возможных радиоэлектронных средств противника
запрограммирован соответствующий вид РПД. Логические устройства передатчиков
позволяют реализовать эту программу на основе результатов анализа принятого
излучения. Для отображения электромагнитной обстановки используются индикаторы
кругового обзора (ИКО) и панорамный спектроанализатор, на которых
представляются данные об источниках излучения (направление на источник, спектр
излучения).
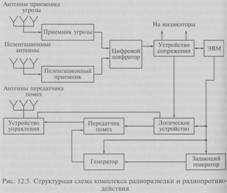 Используя уравнение дальности радиолинии связи, можно
определить дальность разведки при обнаружении и измерении параметров и
распознавании сигналов радиоэлектронных средств (РЭС). Дальность разведки
зависит от следующих факторов:
Используя уравнение дальности радиолинии связи, можно
определить дальность разведки при обнаружении и измерении параметров и
распознавании сигналов радиоэлектронных средств (РЭС). Дальность разведки
зависит от следующих факторов:
·
плотность потока
мощности, пик-фактор и длительность сигнала РЭС, или энергия входного сигнала
на входе разведывательного приемника (СРР);
·
степень совпадения
поляризации сигналов РЭС и антенны СРР;
·
чувствительность
(коэффициент шума) входного малошумящего усилителя, коэффициент усиления
антенны СРР;
·
качественные
показатели алгоритма обработки сигнала СРР, зависящие от числа накапливаемых
импульсов и уровня внутренних и внешних помех, типа решаемой задачи
(обнаружение, измерение параметров, распознавание);
·
условия
распространения, диапазон радиоволн и взаимное расположение в пространстве
разведываемой радиотехнической системы и СРР (воздух—поверхность,
поверхность—поверхность, космос — поверхность);
·
степень априорной
неопределенности о параметрах РЭС и режимах их работы;
·
помеховая
обстановка, при которой нужно учитывать помехи любых видов, в частности
создаваемых излучениями других РЭС.
Уравнение максимальной дальности
разведки РЛС можно записать на основе уравнения линии связи (3.1):
12.3. Скрытность и помехоустойчивость
РЭС по отношению к организованным помехам
Скрытность и помехоустойчивость
характеризуют помехозащищенность радиосредств. Под скрытностью понимают
способность РЭС решать поставленные перед ней задачи и не дать возможности СРР
противника обнаружить сам факт работы РЭС (абсолютная скрытность) или
затруднить оценку параметров сигнала, если факт излучения был обнаружен
противником.
Выделяют следующие виды скрытности:
·
энергетическая;
·
частотная;
·
временная;
·
пространственно-временная;
·
структурная.
Энергетическая скрытность может
характеризовать скрытность как самого объекта, так и сигналов, излучаемых
расположенными на нем РЭС.
В первом случае подразумевают
реализацию радиолокационной, оптической и инфракрасной незаметности объекта,
т.е. снижение его излучающих и отражающих свойств в соответствующих диапазонах
электромагнитных волн. Для этого применяются радиопоглощающие материалы,
теплоизолирующие и рассеивающие тепло экраны, обеспечивающие отвод и охлаждение
выхлопных газов. Выбирают формы объекта, при которых резко снижаются отражения
радиоволн и лазерного облучения.
Во втором случае энергетическая
скрытность характеризует способность РЛС противостоять мерам, направленным на
обнаружение ее сигнала разведывательным приемником.
Степень понижения вероятности
обнаружения излучений РЛС характеризуют частотной и временной скрытностью.
Прерывистые во времени сигналы РЛС затрудняют разведку. Для импульсных РЛС,
имеющих большой энергетический потенциал, можно использовать импульсы с
меньшей длительностью и частотой повторения. Существует метод, называемый
«работа под почерк», при котором параметры сигнала своей РЛС подстраивают под
параметры РЛС противника, работающей в этом же районе (поляризацию, частоту,
период следования и длительность импульсов). Данные для подстройки получают от
специального канала разведки излучений РЛС противника, проводимой
предварительно. Работа под почерк вносит неопределенность и затрудняет определение
пеленга разведываемой РЛС из-за перепутывания сигналов на входе
разведывательного приемника.
Другой метод основан на маскировке
работы скрытной РЛС излучением более мощной РЛС, подавление которой не ведет к
потере боеспособности объекта. В этом случае разведывательный приемник
противника обнаруживает излучение более мощной РЛС, например импульсной,
оценивает параметры ее зондирующего сигнала, и под этот сигнал противником
организуются помехи. При этом скрываемая РЛС с меньшей мощностью излучения,
как правило, когерентная и со сложномодулированным зондирующим сигналом с
большой базой, остается необнаруженной.
Применяют различные технические и
организационно-тактические меры повышения временной и частотной скрытности. К
ним относятся:
·
использование
режимов «мерцания» — кратковременного выключения передатчика;
·
перестройка несущей
частоты сигнала скачками от импульса к импульсу по случайному закону в широком
частотном диапазоне, например в пределах полосы частот, составляющей 10... 15%
от несущей частоты. Величины скачков по частоте превосходят частотный
поддиапазон разведприемника, что снижает вероятность обнаружения сигнала РЛС,
а ее дальность при обнаружении целей сложной конфигурации, состоящей из многих
блестящих точек, возрастает;
·
использование
широкополосного многочастотного зондирующего сигнала с большим разносом между
частотными полосками. Сжатие таких сигналов осуществляют в два этапа: вначале
гетеродинными методами уменьшают разнос между частотными полосами, а затем
сжимают частотные составляющие сигналов в корреляторе или в СФ;
·
использование
когерентного режима и сложномодулированных сигналов с большой базой (большим
временем накопления), что позволяет на несколько порядков снизить излучаемую
мощность передатчика.
При изменяющемся местоположении РЛС
появляется пространственная скрытность, что особенно существенно для подвижных
объектов. Она тем выше, чем уже ДНА РЛС и ниже уровень боковых лепестков.
Используют многолучевые антенные решетки с малыми боковыми лепестками ДНА и
адаптацию формы ДНА с учетом направлений прихода мощных помех с целью их минимизации
и максимизации сигналов, отраженных от целей.
Удобным подходом для
экспериментальной и теоретической оценок скрытности при разработке и испытаниях
РЛС является использование вероятностно-энергетического критерия. При оценке
скрытности РЛС производят расчет зон обнаружения цели радиолокатором и
разведки сигналов РЛС определенным типом разведприемника. Его используют при
расчетах и испытаниях РЛС повышенной скрытности. В соответствии с этим
критерием вводят коэффициент (показатель) скрытности 
 дальность обнаружения цели с заданными вероятностями
правильного обнаружения и ложной тревоги;
дальность обнаружения цели с заданными вероятностями
правильного обнаружения и ложной тревоги;  — дальность разведки излучения РЛС с заданными качественными
показателями при известных параметрах разведывательного приемника. Этот
показатель может быть получен и теоретически, и экспериментально.
— дальность разведки излучения РЛС с заданными качественными
показателями при известных параметрах разведывательного приемника. Этот
показатель может быть получен и теоретически, и экспериментально.
При условии  1 РЛС имеет запас по
скрытности. При S< 1 РЛС не скрытна для
данной ситуации. Для вычисления коэффициента S пользуются следующей методикой:
1 РЛС имеет запас по
скрытности. При S< 1 РЛС не скрытна для
данной ситуации. Для вычисления коэффициента S пользуются следующей методикой:
Из выражения (12.7) следует, что
для сигналов с большой базой можно обеспечить достаточно высокую скрытность
действия системы. Нужно, однако, иметь в виду, что для РЛС, даже используя
сложные сигналы, трудно обеспечить абсолютную скрытность: приемник СРР
работает по прямому сигналу, а приемник РЛС — по отраженному.
В тех случаях, когда факт излучения
скрыть не удается, применяют меры, снижающие эффективность системы РПД. К их
числу относятся перестройка рабочей частоты и частоты повторения; построение
угломеров на основе моноимпульсных систем, не подверженных воздействию помех,
излучаемых ПП, совмещенным с целью; применение сложных сигналов. Возможно также
излучение сигналов, направленных на дезинформацию СРР с целью скрыть истинную
картину работы РЛС.
При проектировании РТС военного
назначения большое внимание уделяется повышению помехоустойчивости системы
относительно активных помех. Особенностью является то, что реальная помеховая
обстановка может динамично изменяться и априори неизвестна. В такой ситуации,
учитывая, что помеха создается не природой (собственные шумы приемника,
атмосферные помехи), а постановщиком помех, целесообразно ориентироваться на
наихудший случай, связанный с созданием помех, максимально мешающих работе
системы (в рамках ограничений, накладываемых на технические возможности ПП), и
в этих условиях оптимизировать качество работы проектируемой РТС. Такое
взаимоотношение РТС и ПП создает конфликтную ситуацию, в которой поведение
каждой из сторон описывается в терминах теории игр.
Наиболее широко применяемым
пассивным методом противолокационной радиомаскировки является постановка
дипольной помехи. При этом пассивные помехи создаются разбрасыванием в
атмосфере отрезков бумажных металлизированных лент, металлизированного
стекловолокна или алюминиевой фольги с помощью самолетов, артиллерийских
снарядов или иными способами. Наибольшая эффективность дипольных помех достигается
в том случае, когда длина этих отрезков равна приблизительно половине длины
рабочей волны радиолокационной станции. Эффективная площадь рассеяния (ЭПР)
одиночного полуволнового дипольного отражателя определяется соотношением  угол между осью диполя и направлением электрического
вектора впадающей электромагнитной волны с длиной волны
угол между осью диполя и направлением электрического
вектора впадающей электромагнитной волны с длиной волны  .
.
Облака диполей могут содержать
тысячи отрезков, соизмеримых по размерам с длиной волны, подавляемой РЛС. Так
как пачки диполей комплектуют из нескольких типов с различной длиной, то
переотражения радиоволн от них могут перекрывать широкий частотный диапазон, в
котором работают РЛС. Диполи в атмосфере разносятся ветром, имитируя цели или
образуя протяженные в пространстве облака с высокой отражательной способностью.
Общая ЭПР пачки (облака) случайно ориентированных диполей после разброса в
атмосфере составляет

 — общее число диполей;
— общее число диполей;  — коэффициент разлета, учитывающий эффект слипания и разлома
отдельных диполей.
— коэффициент разлета, учитывающий эффект слипания и разлома
отдельных диполей.
Эту формулу можно применять для
расчета помехоустойчивости РЛС, если размеры облака помех меньше ее
разрешаемого объема  . Величина этого объема определяется шириной ДНА и шириной
спектра сигнала
. Величина этого объема определяется шириной ДНА и шириной
спектра сигнала  и приближенно равна
и приближенно равна
где D — дальность до просматриваемого элемента разрешения;  —
ширина ДНА РЛС соответственно по азимуту и углу места на уровне половинной
мощности.
—
ширина ДНА РЛС соответственно по азимуту и углу места на уровне половинной
мощности.
В отличие от шумовой активной
помехи, перекрывающей весь рабочий диапазон частот приемника РЛС, спектр
сигнала, отраженного облаком дипольных отражателей, занимает практически ту же
полосу частот, что и излучаемый сигнал, но отличается от него. Спектр
отраженного сигнала претерпевает допплеровское рассеяние, которое определяется
средней радиальной скоростью диполей и ее разбросом (дисперсией).
Зачастую значения разброса
скоростей диполей незначительны по сравнению со скоростью целей. Это позволяет
осуществить селекцию целей по допплеровскому сдвигу частоты.
Активными помехами называют
радиосигналы, создаваемые ПП с целью ухудшения работы или полного подавления
РЭС противника. Активные помехи можно подразделить на три группы:
·
непрерывные шумовые
помехи;
·
хаотические
импульсные помехи;
·
последовательности
детерминированных сигналов.
Как уже упоминалось в подразд.
12.1, по отношению к ширине спектра сигнала непрерывные шумовые помехи можно
разделить на заградительные, ширина спектра которых много больше ширины спектра
сигнала и полностью перекрывает возможные положения спектра сигнала на оси
частот, и прицельные, для которых спектры сигнала и помехи практически
совпадают. Сравнительная эффективность такой помехи также была рассмотрена в
подразд. 12.1.
Примером помехи, имеющей вид
детерминированных сигналов, является переизлученный ПП сигнал РЛС с внесением
в него необходимой дезинформации (время задержки, число принятых импульсов).
Это создает иллюзию наличия множества целей, большинство из которых — ложные.
12.4. Борьба с организованными радиопомехами
и эффективность
средств радиопротиводействия
Организованные радиопомехи включают
в себя рассмотренные ранее активные маскирующие (заградительные, прицельные) и
имитирующие помехи с различными видами изменения параметров радиопомех. Для
создания маскирующих помех применяют различные виды сигналов: непрерывные
шумовые, хаотические и регулярные импульсные последовательности,
частотно-модулированные и т.д.
Активные имитирующие помехи используют для внесения ложной информации в
подавляемую РЛС, перегружая каналы обнаружения, измерения, слежения и
распознавания ложными сигналами. Действие последних приводит к уменьшению пропускной
способности системы.
Особенностью имитирующих помех
является их незначительное отличие от полезных сигналов. Имитирующие помехи
можно подразделить по их назначению: подавление каналов обнаружения
разрешения целей, сопровождение (по
дальности, скорости, направлению) и дезинформация системы распознавания.
Средства борьбы с организованными
помехами должны обеспечивать помехозащищенность РЛС. Эти средства позволяют эффективно
работать при одновременном ведении противником радиоразведки и создании
радиопомех.
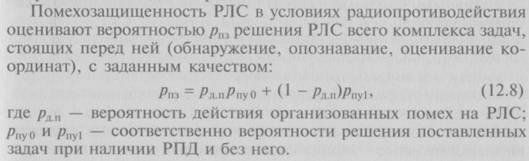
Вероятность  характеризует скрытность РЛС и эффективность системы
радиоразведки противника. Соотношение (12.8) можно использовать для
сравнительных оценок помехоустойчивости с помощью критерия
характеризует скрытность РЛС и эффективность системы
радиоразведки противника. Соотношение (12.8) можно использовать для
сравнительных оценок помехоустойчивости с помощью критерия  — допустимое ухудшение помехоустойчивости.
— допустимое ухудшение помехоустойчивости.
Вероятности  — основные качественные показатели помехоустойчивости РЛС
при наличии и отсутствии организованных радиопомех. Они определяются
назначением данного радиоэлектронного устройства. Наряду с этим показателем
используют частные критерии и показатели качества различных систем РЛС
(обнаружителя, следящего измерителя, системы идентификации и распознавания
целей).
— основные качественные показатели помехоустойчивости РЛС
при наличии и отсутствии организованных радиопомех. Они определяются
назначением данного радиоэлектронного устройства. Наряду с этим показателем
используют частные критерии и показатели качества различных систем РЛС
(обнаружителя, следящего измерителя, системы идентификации и распознавания
целей).
При разработке, построении и
экспериментальных проверках прототипов и серийных РЛС задают необходимые данные
по параметрам радиопомех, которые нужны для теоретического расчета и
экспериментальной оценки качественных показателей помехозащищенности РЛС с
устройствами подавления помех.
К ним относятся: направления
прихода, плотности потоков мощности, виды модулирующих функций, спектральные
характеристики, поляризация, вероятностные характеристики помех. Наиболее
сложной задачей конструирования является создание подавителей комбинированных
помех, когда выполнение основных задач РЛС происходит при действии комплекса
активных, пассивных, естественных и искусственных, умышленных и неумышленных
помех.
Большинство технических методов
защиты РТС от активных помех основано на различных способах селекции:
пространственной, амплитудной, временной, частотной и поляризационной.
Пространственная селекция
предполагает применение передающей и приемной антенн с узкими ДН и малым
уровнем боковых лепестков, что затрудняет ведение разведки и создание помех постановщиком,
размещенным в стороне от лоцируемого объекта.
Наиболее эффективно эти задачи
решаются в адаптивных РЛС с антенными решетками, в которых осуществляется
электронное управление ДН. В таких системах удается реализовать оптимальную
пространственно-временную обработку принимаемого излучения, включающего в себя
сигналы от целей, сигналы от пассивных отражателей, сигналы активных излучений
и флуктуационную помеху.
Амплитудная селекция защищает
приемное устройство от перегрузки помехой, попавшей на его вход. Она
обеспечивается применением различных типов автоматических регулировок усиления,
а также усилителей с расширенным динамическим диапазоном.
Временная селекция достигается
путем стробирования приемного устройства РТС на время действия полезного
сигнала.
Частотная селекция основана на
различии в расположении спектров сигнала и помехи на шкале частот. Для
повышения эффективности частотной селекции применяется перестройка рабочей
частоты РТС на основе анализа помеховой обстановки.
Поляризационная селекция использует
различие в поляризационных характеристиках полезных и мешающих сигналов.
Эффективной мерой борьбы с
активными помехами является вторичная обработка, позволяющая прогнозировать
поведение цели на время потери контакта с ней за счет действия средств РПД, а
также комплексирование систем, работающих на основе различных физических
принципов или в удаленных друг относительно друга частотных диапазонах. В
навигационных системах это комплексирование радионавигационного оборудования и
автономных средств счисления; в локационных — совместное применение РЛС, ОЛС и
пассивных систем.
В ходе радиолокационного конфликта
обе стороны ставят перед собой задачу повысить эффективность своих средств РПД
и одновременно снизить эффективность РПД противника, при этом в качестве
основных ставятся две задачи:
·
нарушение обмена
информацией между силами противника путем снижения эффективности или вывода из
строя его активных и пассивных радиолокационных систем, органов управления и
линий связи;
·
предотвращение или
снижение возможностей противника по нарушению обмена информацией и выводу из
строя собственных систем управления и связи.
Для этого необходимо обеспечить:
·
наблюдение за
интенсивностью излучений в электромагнитном спектре и возможность его
использования своими РТС;
·
вскрытие и
наблюдение за функционированием носителей и пользователей информацией в системе
управления и связи противника;
·
подавление систем
противника путем вывода их из строя;
·
снижение возможности
использования рабочих диапазонов частот электромагнитного спектра РТС
противника путем постановки помех.
Современные системы РПД являются
сложными комплексами, включающими в себя:
·
пассивные и активные
средства разведки электромагнитной обстановки и пространственного размещения
своих и чужих объектов;
средства постановки
дезинформирующих помех, нарушающих и затрудняющих работу радиолокационных
систем противника;
средства маскировки
своих объектов с применением методов и систем, излучающих и поглощающих
электромагнитную энергию.
Доказательством
значения скрытности в современных радиолокационных системах являются
современные системы высокоточного оружия (ВТО), представляющие собой комплексы,
в составе которых имеются система разведки, система наведения и система
поражения. Комплексы ВТО могут поражать цели самого различного характера:
движущиеся и неподвижные, крупноразмерные и точечные, находящиеся на земле, в
воздухе, на воде и под водой. Они базируются на земле, воздушных и космических
объектах.
В ВТО
радиолокационные средства должны обеспечивать надежное обнаружение
малоразмерных целей, с высокой точностью определять вектор состояния цели
(пространственные координаты, радиальные и истинные скорости, радиолокационные
признаки для идентификации целей), производить захват и траекторное
сопровождение цели с последующей выдачей целеуказания системам поражения.
Появление ВТО
приводит к необходимости создания новых методов и средств зашиты. Основные
способы защиты объектов от ВТО (в которых радиолокационные средства выполняют
главную роль) подразделяют на четыре основные группы:
1)способы
поражающего воздействия (огневое поражение средствами ПВО; преждевременный
подрыв боевой части ВТО; применение активных помех, нарушающих управление в
контурах наведения ВТО; огневое поражение комплексов ВТО);
2)способы уменьшения
информации (применение всех методов повышения скрытности, рассмотренных в
предыдущем разделе, применение дублирующих разнесенных в пространстве комплексов,
снижение побочных излучений в пространстве и в частотных диапазонах, снижение
радиолокационной заметности, ухудшение условий распространения электромагнитных
волн между ВТО и объектом);
3)способы смещения
точки наведения (применение дополнительных источников излучений — ловушек,
ложных целей, использование переотражений от подстилающей поверхности и других
объектов, постановка уводящих активных помех, применение разнесенных
многодиапазонных систем);
4)способы уменьшения
уязвимости объектов (военно-инженерные методы защиты, рациональное
конструирование, маскировка и т. п.).
В условиях
применения ВТО повышение скрытности работы РЛС приобретает особое значение. РЛС
должна выполнять свои задачи и одновременно максимально затруднять работу
систем радиотехнической разведки. Поскольку условиями обнаружения и идентификации
сигналов РЛС являются их достаточные для анализа мощность и энергия, то в
целях обеспечения скрытности эти параметры РЛС стремятся уменьшить. Современные
средства разведки имеют чувствительность, позволяющую обнаружить факт
излучения импульсной РЛС (по одному импульсу и основномулепестку ДНА, а при
обеспечении радиомолчания в районе расположения РЛС даже по фону боковых
лепестков).
Большое значение
имеют внешние условия, в которых развивается радиолокационный конфликт. Важную
роль играет используемый диапазон частот РЛС. В декаметровом диапазоне мощный
сигнал загоризонтной РЛС может быть обнаружен на дистанции несколько тысяч
километров за счет переотражений от ионосферы. С другой стороны, если
разведуемая РЛС и система РПД противника находятся на поверхности Земли или
моря, то в микроволновом диапазоне радиоволны за горизонтом сильно затухают и
находящийся в зоне тени разведывательный приемник сигнал, как правило, не
обнаруживает. Расчеты показывают, что в сантиметровом диапазоне волн за радиогоризонтом
дополнительное затухание на каждый километр дистанции составляет 2...6 дБ в
зависимости от степени рефракции. При расчете дальности скрытной работы
микроволновой РЛС следует учитывать интерференционный множитель. Влияние
земной поверхности сказывается в сильном ослаблении сигнала на входе
приемника, расположенного за горизонтом. Если приемник системы РПД расположен
на высоколетящем самолете, а корабельная РЛС должна работать по надводным
целям, то дальность разведки будет возрастать. Поэтому ДНА РЛС следует делать
узкой в вертикальной плоскости и стабилизировать ее положение при качке.
Из изложенного ясно,
что решение задач защиты от ВТО, так же как и его эффективного применения,
ставит перед разработчиками радиоэлектронных средств сложнейшие проблемы. Для
их разрешения радиоинженер должен владеть широким набором современных методов
анализа и синтеза различных РТС.
Контрольные вопросы
1.Какие задачи
решают системы радиопротиводействия и контррадиопротиводействия?
2.В чем заключается
активное и пассивное РПД?
3.Какова роль
маскирующих и имитирующих помех?
4.В чем отличие
заградительных и прицельных радиопомех?
5.Почему большее
применение в системах РПД находят помехи шумового типа?
6Какое воздействие
помеха шумового типа оказывает на работу РЛС?
7.Как оценивают
эффективность помех при подавлении РЛС?
8.Какие задачи
решают системы радиотехнической разведки?
9.Какие параметры
РЛС противника определяются приемником разведки?
10.Какие
функциональные узлы входят в состав аппаратуры радиотехнической разведки?
11.Как
осуществляется анализ радиосигналов в станции разведки?
12.От чего зависит
дальность радиоразведки?
13.Какие методы
радиомаскировки находят наибольшее применение?
14.Что такое
скрытность действия РЭС и как она обеспечивается?
15.Каковы методы
повышения эффективности средств радиопротиводействия?
16.Какие способы
защиты объектов от ВТО могут быть использованы?
17.Какие методы
защиты РЛС от организованных радиопомех находят применение?