РАДИОЛОКАЦИОННАЯ СЕЛЕКЦИЯ И
РАСПОЗНАВАНИЕ ОБЪЕКТОВ
6.1. Методы защиты от пассивных помех
Пассивные помехи представляют собой
радиосигналы, отраженные мешающими объектами при их облучении зондирующими
сигналами РЛС. Воздействие пассивных помех проявляется в подавлении и
маскировке сигналов, отраженных от наблюдаемой цели. Интенсивность помех может
существенно превышать не только уровень собственных шумов приемника, но и
полезный сигнал цели, что затрудняет ее радиолокационное наблюдение, а иногда
делает его вообще невозможным.
Методы борьбы с помехами основаны
на различии характеристик сигналов, отраженных целью и мешающими отражателями.
Эти различия связаны с разной протяженностью и положением их в пространстве,
скоростью движения и особенностями отражающих свойств.
Для улучшения соотношения сигнала и
помехи необходимо прежде всего улучшать пространственную избирательность РЛС
путем повышения ее разрешающей способности для приближения размера
разрешаемого элемента (разрешаемого объема или площади) к размеру цели, т.е.
необходимо сужением ДНА и расширением спектра сигнала оптимизировать условия
наблюдения малоразмерных целей на фоне помех.
В общей постановке при
проектировании РЛС решается задача выбора параметров зондирующего сигнала и
фильтра обработки отраженных сигналов в приемнике, обеспечивающих наибольшую
вероятность обнаружения цели при заданных вероятности ложной тревоги и
отношении сигнала цели к сумме помехи и шума приемника. Решить эту задачу в
общем виде затруднительно из-за разнообразия статистических характеристик
полезного сигнала и помех.
Для наиболее простого случая
сигнала точечной цели и помехи, создаваемой совокупностью сигналов большого
числа мешающих точечных отражателей, смещенных случайно по времени задержки и
частоте относительно сигнала, можно полагать, что Для минимизации мощности
помехи необходимо минимизировать частичный объем тела взаимной функции
неопределенности в помеховой зоне плоскости 
Если параметры зондирующего сигнала
РЛС заданы и в приемнике применен СФ, то для оптимизации обработки сигнала при
наличии пассивной помехи необходимо ввести второй фильтр, подавляющий частотные
составляющие спектра помехи, которые отличаются от сигнальных на величину
разности их допплеровских смещений. Такая фильтрация, называемая селекцией
движущейся цели, является эффективным средством улучшения радиолокационного
наблюдения и находит достаточно широкое применение в РЛС различного
назначения. Методы и устройства СДЦ будут рассмотрены далее, а здесь мы кратко
остановимся на поляризационной селекции сигнала характеристиках приемного устройства,
способствующих улучшению различимости сигнала на фоне пассивных помех.
Поляризационная селекция основана
на различии поляризационных характеристик цели и мешающих отражателей. Различают
собственную и нулевую поляризации отражателя. При собственной поляризации
отраженная волна имеет такую же поляризацию, как и облучающая, а при нулевой
отраженная волна поляризована ортогонально облучающей. Так, для линейного
вибратора собственной поляризацией является поляризация облучающей волны, параллельная
оси вибратора, а поляризация волны, перпендикулярная оси вибратора, будет
нулевой. Если поляризационные характеристики цели и мешающих отражателей
заранее известны, то поляризацию облучающей волны надо выбрать как можно ближе
к собственной для цели и к нулевой для мешающих отражателей.
Для подавления мешающих отражений
гидрометеоров (дождя, облаков) при радиолокационном наблюдении сосредоточенных
объектов (например, самолетов) применяется круговая поляризация, являющаяся
нулевой для шарообразных капелек, поскольку при отражении от них направление
вращения вектора поляризации изменяется на обратное.
В тумане, облаках и моросящем дожде
форма капелек близка к шарообразной и поляризационная селекция достаточно эффективна.
При увеличении интенсивности дождя капли деформируются и степень подавления
отражений уменьшается. Сигналы сосредоточенной цели также частично подавляются,
но в меньшей степени, чем сигналы гидрометеоров. Результирующий выигрыш в
отношении сигнал/помеха при переходе от линейной поляризации к круговой в
условиях дождя достигает 15... 18 дБ.
Сложнее обстоит дело при приеме
сигналов с произвольной (эллиптической) поляризацией. В оптимальном приемнике в
этом случае необходимо измерять разность фаз между ортогонально поляризованными
составляющими, что технически реализовать достаточно сложно. Некогерентные
системы с поляризационной селекцией, в которых определяется лишь соотношение
амплитуд в каналах с ортогональной поляризацией, проще когерентных, но менее
эффективны.
Исследование поляризации отраженных
сигналов позволяет извлечь некоторую информацию об электрических характеристиках
и форме цели. Если в РЛС предусмотрены независимые каналы передачи и приема
сигналов для ортогональных видов поляризации (например, для горизонтальной и
вертикальной), то возможно извлечь информацию в четырех режимах, для которых
могут быть измерены амплитуда и фаза принимаемых колебаний относительно
опорных. При этом определяются составляющие поляризационной матрицы (см.
формулу (2.9)), характеризующей отражающие свойства цели, что и используется
для поляризационной селекции. Более того, применяя модуляцию излучаемых сигналов
по поляризации можно расширить возможности радиолокационной селекции и
распознавания определенных объектов.
При проектировании РЛС для
улучшения наблюдаемости цели на фоне пассивных помех необходимо предусмотреть
также меры уменьшения влияния возможных перегрузок в приемном тракте РЛС при
приеме сильных сигналов от мешающих отражателей. В этом случае пригодны те же
способы, которые применяются для защиты от активных помех, а именно:
·
применение
переходной цепи с малой постоянной времени, что способствует удалению с экрана
индикатора сплошных засветок, вызванных отражениями от протяженных отражателей
(например, от земной поверхности вблизи РЛС), и устраняет перегрузки
оконечных каскадов приемника;
·
использование
логарифмической амплитудной характеристики приемника, стабилизирующей
действующее значение флуктуаций мешающих отражений, что улучшает наблюдение
цели на фоне дождевых облаков;
·
применение
быстродействующей автоматической регулировки усиления (БАРУ) в приемнике,
устраняющей перегрузки приемника и сплошные засветки на экране,
соответствующие протяженным мешающим отражателям;
·
использование
временной автоматической регулировки усиления (ВАРУ), увеличивающей усиление с
нарастанием дальности от минимального значения сразу после излучения зондирующего
сигнала до максимального на дальностях, близких к максимальной. Это
способствует ослаблению мешающих отражений от земной поверхности и местных
предметов вблизи РЛС.
Надлежащим выбором параметров
зондирующего сигнала и характеристик антенной системы и приемника можно
ослабить влияние пассивных помех, однако для эффективной защиты от них во
многих случаях необходимо применять дополнительно методы селекции полезного
сигнала и, в частности, весьма эффективные допплеровские методы СДЦ.
Следует заметить, что допплеровское
смещение частоты принимаемых сигналов используется в современной радиолокации
не только для выделения сигналов движущихся целей на фоне пассивных помех. Так,
в РЛС с непрерывным излучением допплеровский сдвиг частоты принимаемых сигналов
используется для обнаружения объектов и измерения их скорости, в РЛС с синтезированием
апертуры — для получения радиолокационных изображений высокой четкости, в
метеорологических РЛС — для определения скорости ветра.
6.2. Селекция движущихся целей на
основе эффекта Допплера
Допплеровские методы СДЦ основаны
на различии допплеровских смещений частоты выделяемого полезного сигнала цели и
пассивных помех, обусловленном различием радиальных скоростей цели и мешающих
отражателей.
Для простоты можно считать мешающие
отражатели неподвижными, тогда радиальная скорость цели  будет непосредственно определять допплеровское смешение
частоты относительно помехи
будет непосредственно определять допплеровское смешение
частоты относительно помехи

где  — соответственно частота и длина волны
излучаемых РЛС колебаний.
— соответственно частота и длина волны
излучаемых РЛС колебаний.
Для выделения допплеровского
смещения Fv частота принимаемого сигнала сравнивается с частотой излучаемого.
Наиболее просто это сделать в РЛС непрерывного излучения, в которых излучаемый
сигнал существует и во время приема отраженных. Однако наибольшее практическое
применение находят периодические импульсные зондирующие сигналы, которые могут
обеспечить высокую разрешающую способность и точность при измерении дальности.
Эффективная СДЦ может осуществляться в импульсных системах как при отсутствии
внутриимпульсной модуляции несущей, так и при использовании частотной или
фазовой модуляций. Как будет показано далее, применение периодических сигналов
в системах СДЦ приводит к появлению слепых скоростей, т.е. таких радиальных
скоростей цели, при которых полезный сигнал цели подавляется системой, как и
отражения от неподвижных объектов, и цель не может быть обнаружена. Для устранения
слепых скоростей разработаны различные способы работы и, в частности, вобуляция
(изменение) частоты повторения излучаемых импульсов или работа на двух несущих
частотах. В импульсных РЛС высокочастотные колебания излучаются в течение
длительности зондирующего импульса  Всю остальную часть периода повторения
Всю остальную часть периода повторения  они отсутствуют, и опорные колебания (когерентные с
излучаемыми), необходимые для выявления допплеровского приращения частоты
принимаемых импульсов, создаются в системах СДЦ когерентным гетеродином. Такие
системы называются
они отсутствуют, и опорные колебания (когерентные с
излучаемыми), необходимые для выявления допплеровского приращения частоты
принимаемых импульсов, создаются в системах СДЦ когерентным гетеродином. Такие
системы называются
когерентно-импульсными системами
СДЦ с внутренней когерентностью. В системах СДЦ с внешней когерентностью в
качестве опорных используют высокочастотные колебания сигналов, отраженных от
неподвижных отражателей, расположенных в пределах элемента разрешения
(разрешаемого объема), в котором находится и движущаяся цель.
Системы СДЦ с внутренней и внешней
когерентностью имеют свои достоинства и недостатки, определяющие области их
применения. Построение и эффективность систем СДЦ обоих типов рассмотрены
далее.
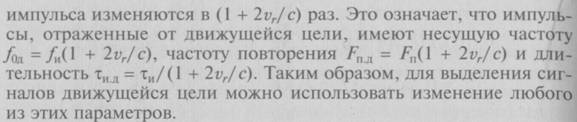
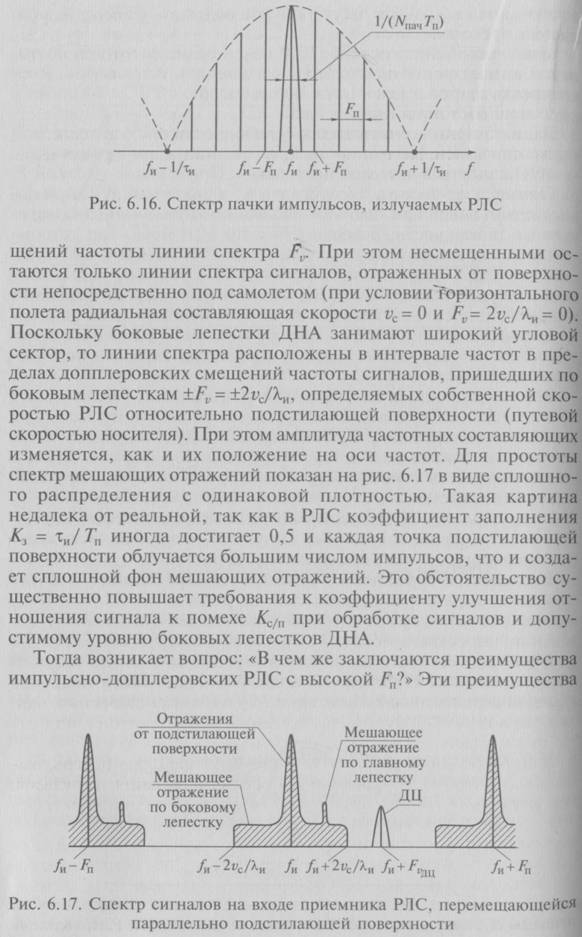
Спектр импульсного сигнала,
отраженного неподвижным точечным объектом, совпадает со спектром зондирующего
импульса. Спектр импульсного сигнала, отраженного от движущегося объекта (рис.
6.1), сжимается при удалении объекта или растягивается при его приближении к
РЛС, так как все частоты спектра
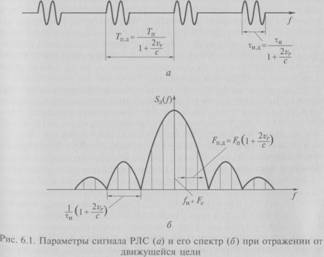
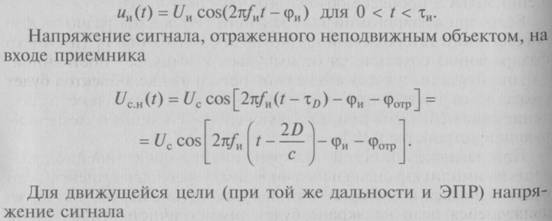
Однако практически реализуемо
только смещение центральной частоты, а точнее, изменение фазы высокочастотного
заполнения импульсов за период повторения Тп, так как из-за малости абсолютного
изменения частоты повторения Fп или длительности импульсов  выявить их трудно.
выявить их трудно.
Когерентно-импульсные системы СДЦ с
внутренней когерентностью.
Системы СДЦ с внутренней когерентностью различаются по способу формирования
когерентных опорных .колебаний во время приема отраженных радиосигналов.
В РЛС, имеющих передающее
устройство с независимым возбуждением, высокочастотные колебания задающего
генератора, работающего непрерывно, используются в качестве опорных непосредственно
или после умножения до частоты, на которой происходит их сравнение в
когерентном детекторе (рис. 6.2, а) с частотой принимаемых колебаний.
При применении в передающем
устройстве генератора с самовозбуждением (обычно магнетрона) источником когерентных
опорных колебаний является специальный генератор
— когерентный гетеродин,
фазируемый колебаниями генератора передатчика в течение длительности импульса  . Когерентный гетеродин работает на частоте сравнения, на
которой происходит выделение допплеровского смещения. Чаще всего частотой
сравнения является промежуточная частота приемника
. Когерентный гетеродин работает на частоте сравнения, на
которой происходит выделение допплеровского смещения. Чаще всего частотой
сравнения является промежуточная частота приемника . Такая схема (рис. 6.2, б) получила широкое
распространение, поэтому на ее работе целесообразно остановиться подробнее.
. Такая схема (рис. 6.2, б) получила широкое
распространение, поэтому на ее работе целесообразно остановиться подробнее.
Напряжение высокочастотных
колебаний, генерируемых генератором высокой частоты для любого периода
повторения, можно записать как
В результате смешения колебаний
отраженных сигналов с колебаниями местного стабильного гетеродина в смесителе
осуществляется переход на промежуточную частоту  на которой работает и когерентный гетеродин. Для фазирования
когерентного гетеродина частота колебаний генератора высокой частоты
предварительно понижается с помощью смесителя фазирования до промежуточной
на которой работает и когерентный гетеродин. Для фазирования
когерентного гетеродина частота колебаний генератора высокой частоты
предварительно понижается с помощью смесителя фазирования до промежуточной . Напряжение на выходе когерентного гетеродина
. Напряжение на выходе когерентного гетеродина  Для улучшения процесса фазирования колебания когерентного
гетеродина прерываются схемой управления незадолго до очередного импульса
генератора высокой частоты и возобновляются после установления колебаний
генератора. Время работы когерентного гетеродина в каждом периоде повторения
должно превышать
Для улучшения процесса фазирования колебания когерентного
гетеродина прерываются схемой управления незадолго до очередного импульса
генератора высокой частоты и возобновляются после установления колебаний
генератора. Время работы когерентного гетеродина в каждом периоде повторения
должно превышать  , соответствующее максимальной дальности действия РЛС в режиме
СДЦ.
, соответствующее максимальной дальности действия РЛС в режиме
СДЦ.
Напряжение когерентного гетеродина
и отраженных сигналов детектируется когерентным детектором. Ограничитель
амплитуды сигналов перед детектированием сжимает их динамический диапазон и
устраняет влияние модуляции амплитуды сигналов при вращении ДНА в процессе
обзора, что улучшает СДЦ.
Если при фазировании когерентного
гетеродина разность фаз когерентного гетеродина и фазирующих колебаний  (параметр фазирования) сохраняется от импульса к импульсу
постоянной, то амплитуда импульсов сигнала от неподвижных объектов будет
сохраняться постоянной, что обеспечивает эффективное подавление таких сигналов
при последующей фильтрации в компенсирующем устройстве СДЦ.
(параметр фазирования) сохраняется от импульса к импульсу
постоянной, то амплитуда импульсов сигнала от неподвижных объектов будет
сохраняться постоянной, что обеспечивает эффективное подавление таких сигналов
при последующей фильтрации в компенсирующем устройстве СДЦ.
При наблюдении целей на экране
индикатора с линейной разверткой амплитуда сигнальных видеоимпульсов
движущейся цели будет меняться с частотой допплеровского смещения и отметка
Движущейся цели на экране будет симметричной относительно
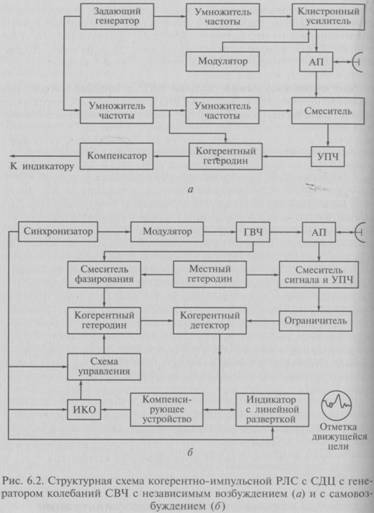
линии развертки и заштрихованной
(рис. 6.2, б), в то время как отметка неподвижного объекта будет односторонней
с постоянной амплитудой.
В современных РЛС индикаторы с
линейной разверткой используются редко, поэтому сигналы неподвижных объектов
предварительно подавляются в специальном компенсирующем устройстве, и при
идеальном подавлении на выходе последнего остаются только сигналы движущихся
целей, которые дальше воспроизводятся на экране индикатора с яркостной
модуляцией луча (например, И КО) или подвергаются дальнейшей обработке с целью
извлечения необходимой информации о цели (дальность, скорость и угловые
координаты).
Когерентно-импульсные системы СДЦ с
внешней когерентностью. Использование в
системах СДЦ с внешней когерентностью в качестве опорных колебаний отраженных
сигналов неподвижных отражающих объектов, находящихся в том же разрешаемом
элементе, что и движущаяся цель, было бы идеальным решением задачи СДЦ,
особенно при наличии собственной скорости РЛС vc. В системах с внутренней когерентностью vc приходится специально компенсировать
соответствующим смещением частоты когерентного гетеродина, а это не так просто
при изменении собственной скорости и направления на объект. По этой причине
системы СДЦ с внешней когерентностью нашли применение в РЛС, располагающихся на
самолетах и космических аппаратах, для выделения объектов, движущихся по
поверхности суши или моря.
Однако колебания, отраженные от
множества неподвижных отражателей (например, от земной поверхности), называемых
фоновыми, флуктуируют по амплитуде, частоте и фазе, поэтому эффективность
системы СДЦ с внешней когерентностью обычно ниже, чем с внутренней. В
результате биений сигнала движущейся цели с отражениями от фона амплитуда
импульсов движущейся цели на выходе детектора будет изменяться с допплеровской
частотой, что и используется для выделения движущейся цели (точно так же, как
и в системе с внутренней когерентностью) непосредственно на экране индикатора
с линейной разверткой или с помощью компенсирующего устройства.
Следует заметить, что в системах
СДЦ с внешней когерентностью отсутствие фона, т.е. опорных колебаний, может
привести к потере сигнала движущейся цели, если не принято надлежащих мер,
например автоматического отключения устройства СДЦ в таких ситуациях.
6.3. Аналоговая и цифровая фильтрация в
системах СДЦ
Наиболее простым фильтром
подавления пассивных помех является череспериодный компенсатор (ЧПК), в
котором осуществляется череспериодное вычитание сигнала, т.е. из отраженных
сигналов, принимаемых в текущий период повторения, вычитаются сигналы,
задержанные с помощью линии задержки (рис. 6.3, а)
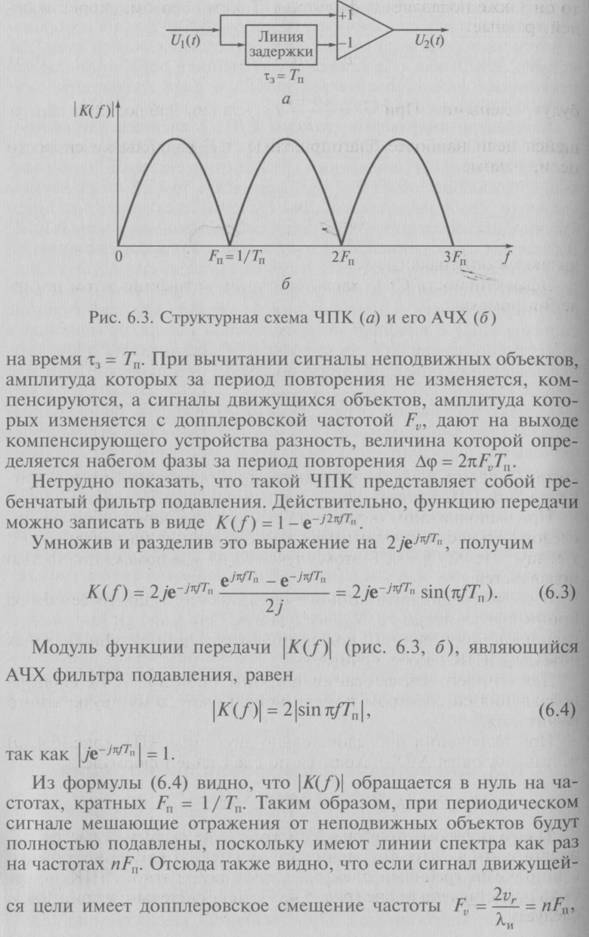
при прохождении режекторного
фильтра.
Коэффициент улучшения  который часто называют также коэффициентом подпомеховой
видимости, позволяет более полно оценить эффективность работы системы СДЦ и
поэтому используется в качестве критерия рационального выбора числа звеньев и
значений весовых коэффициентов трансверсального режекторного фильтра.
который часто называют также коэффициентом подпомеховой
видимости, позволяет более полно оценить эффективность работы системы СДЦ и
поэтому используется в качестве критерия рационального выбора числа звеньев и
значений весовых коэффициентов трансверсального режекторного фильтра.
Форму спектра допплеровских частот
пассивной помехи обычно принимают колокольной (повторяющей форму распределения
Гаусса): 
где  — дисперсия радиальной составляющей скорости мешающих
отражателей;
— дисперсия радиальной составляющей скорости мешающих
отражателей;
 — дисперсия соответствующих допплеровских
— дисперсия соответствующих допплеровских

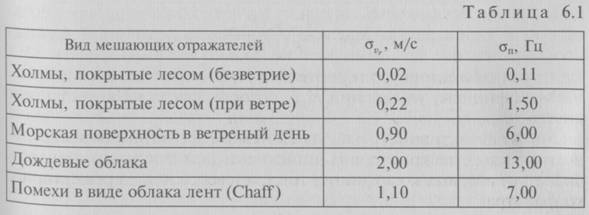
В табл. 6.1 приведены
ориентировочные значения СКО  для некоторых мешающих отражателей.
для некоторых мешающих отражателей.
Известна также эмпирическая формула
СКО  ,
,
связывающая о леса со скоростью
ветра  в диапазоне частот 3...24
ГГц.
в диапазоне частот 3...24
ГГц.
Подсчитано, что при использовании
трансверсального фильтра с АЧХ вида  равномерном распределении скоростей
целей, находящихся в точке облучения, и гауссовом спектре допплеровских частот
помехи в полосу подавления фильтра попадает 20 % целей при
равномерном распределении скоростей
целей, находящихся в точке облучения, и гауссовом спектре допплеровских частот
помехи в полосу подавления фильтра попадает 20 % целей при  при п = 2 и
почти половина целей при п = 4. Таким образом, простое увеличение числа звеньев фильтра
ведет к чрезмерному расширению полосы режекции и сужению полосы пропускания
фильтра. Для уменьшения потерь полезных сигналов целей необходимо рациональным
выбором п и величины весовых коэффициентов а стремиться получить форму АЧХ
фильтра, близкую к прямоугольной с необходимой для подавления помех полосой
режекции. Расчеты показывают, что при п < 4 можно обеспечить требуемую АЧХ
режекторного фильтра СДЦ оптимальным выбором весовых коэффициентов.
при п = 2 и
почти половина целей при п = 4. Таким образом, простое увеличение числа звеньев фильтра
ведет к чрезмерному расширению полосы режекции и сужению полосы пропускания
фильтра. Для уменьшения потерь полезных сигналов целей необходимо рациональным
выбором п и величины весовых коэффициентов а стремиться получить форму АЧХ
фильтра, близкую к прямоугольной с необходимой для подавления помех полосой
режекции. Расчеты показывают, что при п < 4 можно обеспечить требуемую АЧХ
режекторного фильтра СДЦ оптимальным выбором весовых коэффициентов.
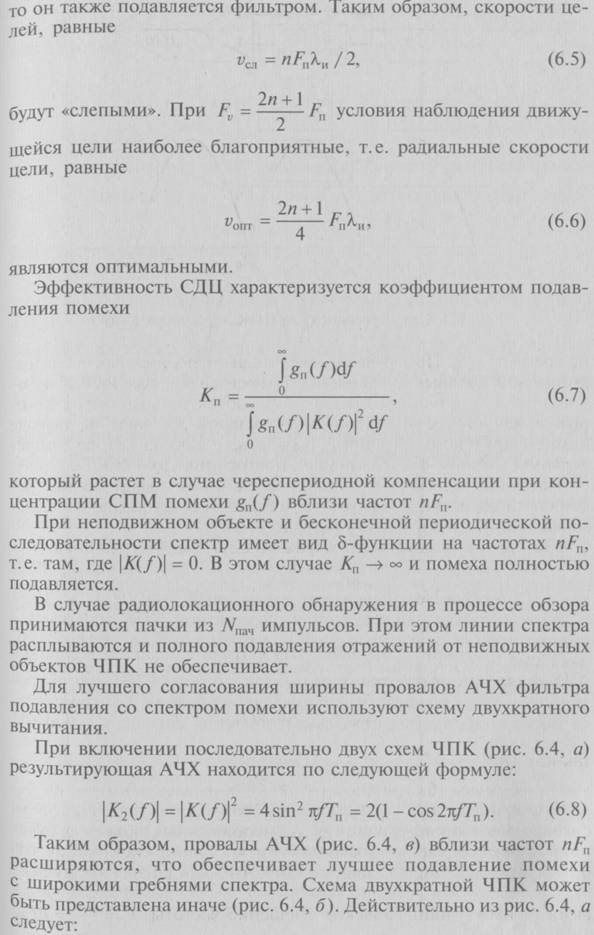
При наличии пассивных помех и
флуктуационных шумов схема оптимальной обработки периодического импульсного
сигнала в PJIC должна содержать три последовательно включенных фильтра:
фильтр, согласованный с одиночным импульсом; гребенчатый фильтр накопления
сигнала и гребенчатый фильтр подавления помехи.
Необходимо обеспечить очень высокие
требования к точности и стабильности работы отдельных узлов и элементов системы
СДЦ и, в частности, к сохранению равенства  в линии задержки схемы ЧПК, а также к
сохранению амплитуды и формы сигналов в ее каналах. Для получения достаточно
большого времени задержки
в линии задержки схемы ЧПК, а также к
сохранению амплитуды и формы сигналов в ее каналах. Для получения достаточно
большого времени задержки  и сохранения формы импульса при его
задержке в аналоговых компенсаторах используют ультразвуковые линии задержки с
полосой
и сохранения формы импульса при его
задержке в аналоговых компенсаторах используют ультразвуковые линии задержки с
полосой  . Такие линии имеют большое затухание (более 80 дБ), для
компенсации которого в канал задержки последовательно включается усилитель. Для
идентичности каналов такой же усилитель включается и в другой канал («не задержанный»),
а для выравнивания коэффициентов усиления каналов еще и аттенюатор с
затуханием, равным затуханию линии задержки. Для эффективной работы схемы ЧПК
баланс должен поддерживаться при широком изменении условий эксплуатации, что
представляет достаточно сложную техническую задачу. В результате аналоговые
фильтры получаются дорогостоящими и недостаточно надежными. Поэтому
предпочтение отдается цифровым фильтрам подавления. Перспективны также фильтры,
в которых роль линии задержки гребенчатого фильтра выполняют приборы с
зарядовой связью.
. Такие линии имеют большое затухание (более 80 дБ), для
компенсации которого в канал задержки последовательно включается усилитель. Для
идентичности каналов такой же усилитель включается и в другой канал («не задержанный»),
а для выравнивания коэффициентов усиления каналов еще и аттенюатор с
затуханием, равным затуханию линии задержки. Для эффективной работы схемы ЧПК
баланс должен поддерживаться при широком изменении условий эксплуатации, что
представляет достаточно сложную техническую задачу. В результате аналоговые
фильтры получаются дорогостоящими и недостаточно надежными. Поэтому
предпочтение отдается цифровым фильтрам подавления. Перспективны также фильтры,
в которых роль линии задержки гребенчатого фильтра выполняют приборы с
зарядовой связью.
При цифровой обработке выборки
сигнала, следующие с интервалами дискретизации по времени, преобразуются с
помощью АЦП в коды (обычно двоичные) чисел, соответствующих амплитуде выборок.
Далее эти числа в цифровом процессоре подвергаются весовой обработке в
соответствии с алгоритмом решаемой задачи.
Фильтр СДЦ является режекторным
фильтром, вырезающим из спектра частоты вблизи  , что обеспечивается,
как показано ранее, задержкой сигнала и весовым суммированием. В цифровом виде
просто осуществить задержку на несколько периодов (большое п) и сравнительно несложно управлять
величиной весовых коэффициентов, что позволяет не только оптимизировать АЧХ
фильтра подавления, но и управлять ею в соответствии с изменением помеховой
обстановки, т.е. создать адаптивную цифровую систему СДЦ.
, что обеспечивается,
как показано ранее, задержкой сигнала и весовым суммированием. В цифровом виде
просто осуществить задержку на несколько периодов (большое п) и сравнительно несложно управлять
величиной весовых коэффициентов, что позволяет не только оптимизировать АЧХ
фильтра подавления, но и управлять ею в соответствии с изменением помеховой
обстановки, т.е. создать адаптивную цифровую систему СДЦ.
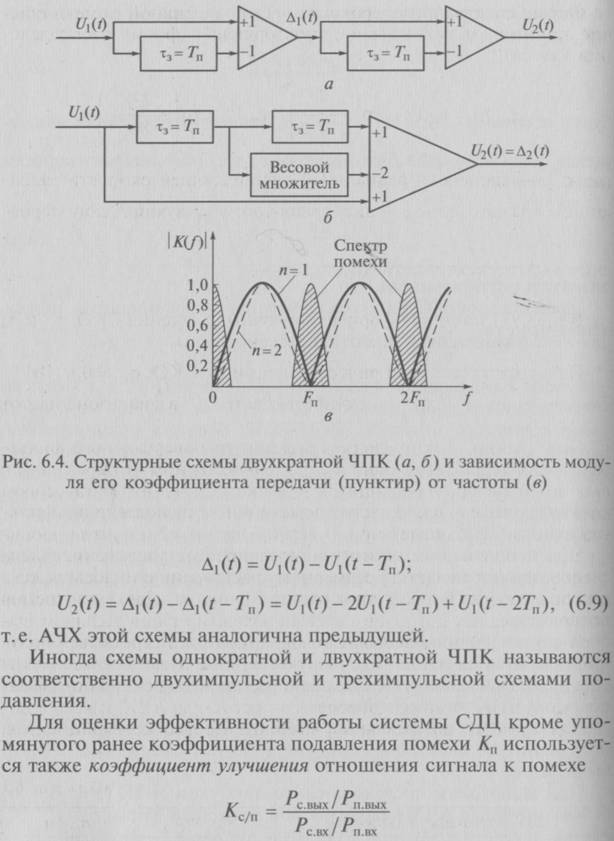
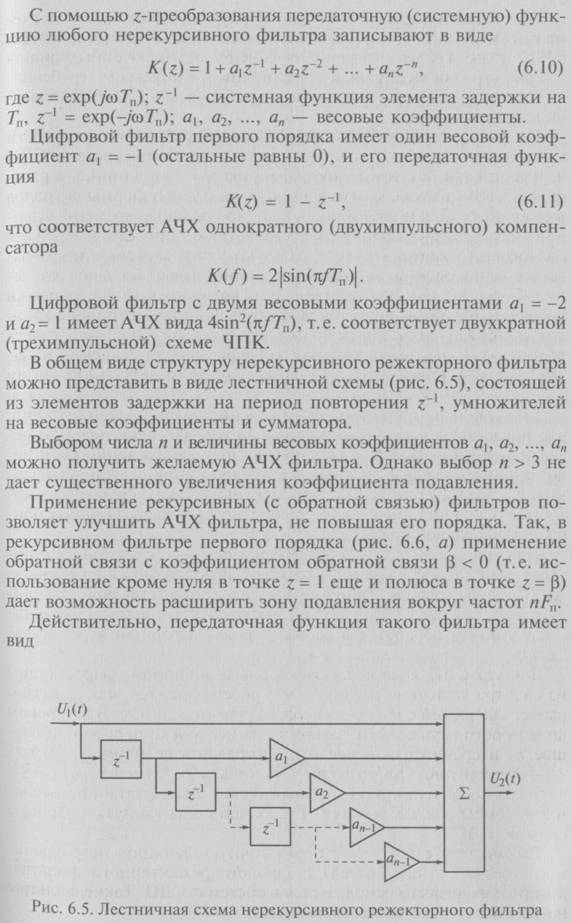
Рассмотрим структуру и передаточную
функцию нерекурсивного (без обратных связей) цифрового режекторного фильтра, который
чаще всего используется в системах СДЦ. Такие фильтры называются также
трансверсальными.
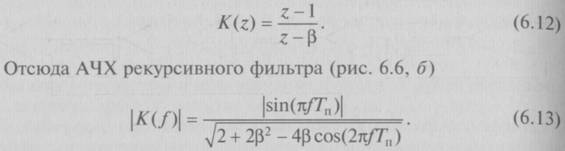
Таким образом, в рекурсивном
фильтре первого порядка при использовании лишь одного элемента памяти можно
получить АЧХ такую же, как и для нерекурсивного фильтра второго порядка, причем
изменением величины коэффициента обратной связи можно изменять ширину зоны
подавления. Это достигается за счет циркуляции импульсов в цепи обратной связи.
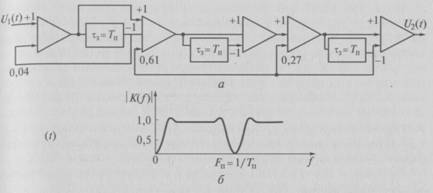
На рис. 6.7, а представлена схема
рекурсивного фильтра третьего порядка, в котором выбором коэффициентов
обратных связей обеспечена форма АЧХ, близкая к прямоугольной (рис. 6.7, б).
Изменение весовых коэффициентов позволяет получить оптимальное для решаемой
задачи соотношение полосы прозрачности и полосы подавления фильтра.
Дополнительные возможности
управления формой АЧХ открываются при использовании в рекурсивных фильтрах
двухсторонних обратных связей (вперед и назад). Следует заметить, что задача
получения желаемой формы АЧХ легче решается в цифровом виде. 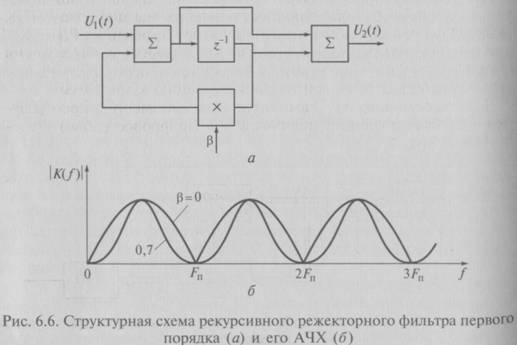
Рассмотрим основные требования к
выбору параметров цифровой системы СДЦ на примере цифровой двухимпульсной схемы
подавления помех на нерекурсивном фильтре (однократная цифровая ЧПК).
Структура такой системы от
аналогового входа, на который подается сигнал u1(t) с выхода фазового детектора приемника, до
аналогового выхода, с которого импульсы движущейся цели u2(t) и неподавленные фильтром остатки помехи поступают на
индикатор РЛС и вторичную обработку, если она предусмотрена, представлена на
рис. 6.8.
Импульсный элемент (ИЭ)
осуществляет дискретизацию видеоимпульсов u1(t) поступающих на вход схемы цифровой ЧПК с
выхода фазового (когерентного) детектора приемника РЛС. Желательно выбрать
период дискретизации Тд таким, чтобы за время длительности
импульса  иметь, по крайней мере, две выборки сигнала, что сводит
потери на дискретизацию к минимуму.
иметь, по крайней мере, две выборки сигнала, что сводит
потери на дискретизацию к минимуму.
Далее с помощью АЦП амплитуда
каждой выборки преобразуется в соответствующий цифровой код (цифровое слово) с
учетом знака u1(t).
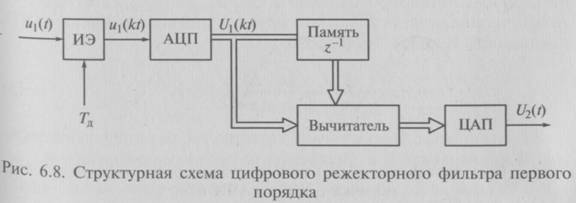
С выхода АЦП код вводится в
устройство цифровой памяти (например, регистр) и с каждым тактом продвигается в
нем на величину Тд. Через период повторения Тп задержанные цифровые слова вычитаются из текущих значений
выборок непосредственно на выходе АЦП, и в результате вычитания происходит
компенсация импульсов помехи, представленных в цифровой форме. С помощью ЦАП
сигналы движущихся целей и остатки неподавленных помех восстанавливаются в
аналоговой форме для их отображения на экране индикатора с яркостной
модуляцией луча ЭЛТ.
Таким образом, видно, что
рассмотренная цифровая схема является эквивалентом однократной аналоговой
схемы ЧПК. Приведем некоторые соображения к выбору основных параметров
цифровой схемы ЧПК.
характеризующее максимально
возможное подавление помехи. Разрядность АЦП г и соответственно емкость памяти  выбирают таким образом, чтобы потери, связанные с
квантованием, сказывались на эффективности системы СДЦ меньше, чем другие
параметры РЛС, влияние которых на качество работы системы СДЦ рассматривается
далее.
выбирают таким образом, чтобы потери, связанные с
квантованием, сказывались на эффективности системы СДЦ меньше, чем другие
параметры РЛС, влияние которых на качество работы системы СДЦ рассматривается
далее.
Остановимся на проблеме так
называемых «слепых» фаз и связанных с этим потерь при СДЦ. В отличие от
«слепых» скоростей, возникающих при частотах допплеровского сдвига Fv, равных или кратных Fп (рис. 6.9, а), «слепые» фазы возникают при Fn>
Fv в случаях, когда
соседние импульсы сигналов движущихся целей (ДЦ) имеют равные амплитуды  на рис. 6.9, б) и, следовательно, будут частично подавлены
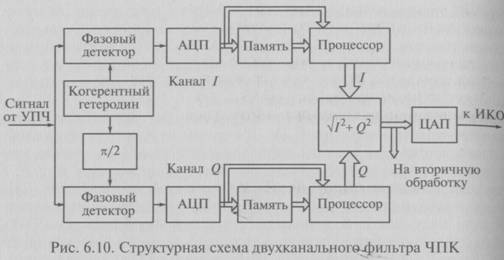
одноканальным фильтром ЧПК. Для устранения потерь используется двухканальная
схема фильтра ЧПК (рис. 6.10), состоящая из синхронного канала I и квадратурного Q. На фазовые детекторы каналов опорные
колебания когерентного гетеродина подаются со сдвигом на
на рис. 6.9, б) и, следовательно, будут частично подавлены
одноканальным фильтром ЧПК. Для устранения потерь используется двухканальная
схема фильтра ЧПК (рис. 6.10), состоящая из синхронного канала I и квадратурного Q. На фазовые детекторы каналов опорные
колебания когерентного гетеродина подаются со сдвигом на  , благодаря чему допплеровская огибающая сигнальных
импульсов в квадратурном канале сдвигается на (рис. 6.9, в). При суммировании цифровых
сигналов I и Q на выходах каналов подавление сигналов
устраняется.
, благодаря чему допплеровская огибающая сигнальных
импульсов в квадратурном канале сдвигается на (рис. 6.9, в). При суммировании цифровых
сигналов I и Q на выходах каналов подавление сигналов
устраняется.
При суммировании сигналов могут
быть использованы операции  (соответствующие квадратичному
детектированию)
(соответствующие квадратичному
детектированию)
и  (соответствующие линейному детектированию).
(соответствующие линейному детектированию). 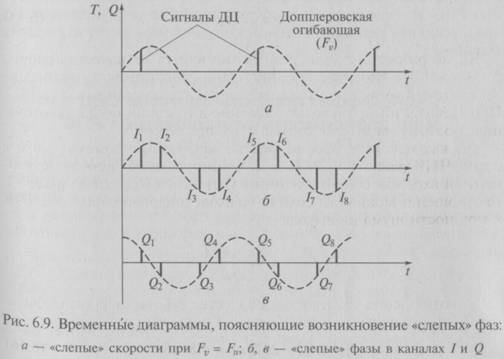
Расчет показывает, что переход от
одноканального фильтра ЧПК к двухканальному дает уменьшение потерь за счет
эффекта «слепых фаз» от 2,8 до 13,7 дБ для вероятностей правильного обнаружения
от 0,5 до 0,9 соответственно и вероятности ложной тревоги  Выигрыш зависит также от числа импульсов в пачке и их
флуктуаций. Конечно, двухканальная схема фильтра СДЦ сложнее одноканальной и
требует поддержания фазового сдвига опорных колебаний равным , а также идентичности АЧХ каналов.
Выигрыш зависит также от числа импульсов в пачке и их
флуктуаций. Конечно, двухканальная схема фильтра СДЦ сложнее одноканальной и
требует поддержания фазового сдвига опорных колебаний равным , а также идентичности АЧХ каналов.
Развитие цифровой техники позволило
уже в середине 1970-х гг. применять двухканальные фильтры СДЦ в аэродромных
обзорных РЛС, для которых надежное обнаружение движущихся объектов в условиях
разнообразных пассивных помех имеет важнейшее значение.
6.4. Эффективность системы СДЦ и ее
зависимость от параметров РЛС
Для характеристики эффективности
работы системы СДЦ можно использовать введенный ранее (см. формулу (6.7))
коэффициент подавления пассивных помех Кп. Однако более полной характеристикой
качества работы системы является коэффициент улучшения отношения сигнал/помеха
при прохождении фильтра подавления

где  — мощности сигнала и помехи на входе и
выходе фильтра соответственно.
— мощности сигнала и помехи на входе и
выходе фильтра соответственно.
Этот коэффициент называется также
коэффициентом подпомеховой видимости.
Величина зависит от изменений спектра сигналов движущихся целей и
пассивных помех, вызванных движением пассивных отражателей относительно друг
друга и РЛС, вращением ДНА при обзоре, нестабильностью частоты передатчика и
гетеродинов, частоты повторения и длительности импульсов РЛС, а также других
ее параметров.
зависит от изменений спектра сигналов движущихся целей и
пассивных помех, вызванных движением пассивных отражателей относительно друг
друга и РЛС, вращением ДНА при обзоре, нестабильностью частоты передатчика и
гетеродинов, частоты повторения и длительности импульсов РЛС, а также других
ее параметров.
Рассмотрим влияние указанных
факторов на эффективность систем СДЦ с череспериодной компенсацией сигналов и
необходимые требования к некоторым параметрам РЛС.
Стабильность частоты гетеродинов и
генератора высокой частоты.
Разность фаз колебаний сигнала и когерентного гетеродина (см. рис. 6.2) зависит
от их частот  , а также времени распространения сигнального импульса до
объекта и обратно
, а также времени распространения сигнального импульса до
объекта и обратно
Несмотря на то, что это значение
кратковременной нестабильности (за период Тп), обеспечить ее можно лишь применением
специальных мер стабилизации частоты местного гетеродина.
Когерентный гетеродин должен быть
достаточно стабильным не только по частоте, но и начальной фазе колебаний
(постоянство параметра фазирования), а его частота  точно равна промежуточной
точно равна промежуточной  При неточной настройке видеосигнал будет
содержать несколько периодов биений
При неточной настройке видеосигнал будет
содержать несколько периодов биений  , что нарушит работу компенсатора. Для
нормальной работы необходимо выполнение условия
, что нарушит работу компенсатора. Для
нормальной работы необходимо выполнение условия  при котором в пределах видеоимпульса
укладывается не более четверти периода биений.
при котором в пределах видеоимпульса
укладывается не более четверти периода биений.
Требования к стабильности частоты
генератора высокой частоты ниже, чем к местному гетеродину, так как для
генератора существенным является уход частоты только за время длительности
импульса ти, значительно меньшей периода Тп. Для генератора

Следует заметить, что
нестабильность частоты генератора высокой частоты и гетеродинов не
единственная причина неполного подавления помехи. Фактически для получения
остаточного фона помехи, не превышающего уровня 0,06, к стабильности частоты
предъявляются еще более высокие требования. Дополнительно накладывается
требование максимально допустимого ухода частоты за время длительности импульса
 что необходимо для исключения изменений амплитуды сигналов
неподвижных объектов, вызванных биениями из-за различия частот в пределах
импульса.
что необходимо для исключения изменений амплитуды сигналов
неподвижных объектов, вызванных биениями из-за различия частот в пределах
импульса.
Модулятор РЛС с СДЦ должен
обеспечить заданную форму и амплитуду модулирующих импульсов, стабильную
длительность и равенство периода повторения импульсов на выходе модулятора
периоду синхронизирующих импульсов Тп и времени задержки в фильтре подавления  Обычно стремятся получить прямоугольную форму модулирующих
импульсов, так как при этом легче выполнить условие неизменности частоты
колебаний генератора высокой частоты на протяжении импульса. При изменении
длительности импульса за период повторения на величину Дти после
вычитающего устройства остается некомпенсированное остаточное напряжение,
допустимый уровень которого определяет требования к стабильности
Обычно стремятся получить прямоугольную форму модулирующих
импульсов, так как при этом легче выполнить условие неизменности частоты
колебаний генератора высокой частоты на протяжении импульса. При изменении
длительности импульса за период повторения на величину Дти после
вычитающего устройства остается некомпенсированное остаточное напряжение,
допустимый уровень которого определяет требования к стабильности  .
.
Влияние флуктуаций амплитуды
сигналов. Сигналы неподвижных объектов обычно не имеют строго постоянной
амплитуды из- за флуктуаций их эффективной площади рассеяния. Кроме того,
большинство мешающих объектов не являются совершенно неподвижными (деревья,
кусты, волны и т.п.) и отраженный ими сигнал имеет допплеровское смещение частоты.
Поэтому даже при идеальном выборе параметров системы СДЦ не удается полностью
избавиться от фона местных предметов. Кроме случайных флуктуаций амплитуды
сигналов при работе РЛС в режиме обзора сказывается также изменение амплитуды
по закону, определяемому формой сканирующей ДНА.
Отрицательное влияние изменений
амплитуды сигналов, отраженных от неподвижных объектов, может быть уменьшено,
как Уже упоминалось, рациональным выбором амплитудной характеристики приемного
канала, использованием логарифмической характеристики, ограничением сигнала и
БАРУ.
Важное значение имеет также выбор
величины напряжения когерентного гетеродина UK и типа детектора.
Наилучшие результаты дает применение балансного (фазового) детектора при
Равенстве сигнального и опорного напряжений  Собственное движение РЛС со скоростью vc приводит к смещению частоты сигналов, отраженных
элементарными отражателями, Зависящему от угла
Собственное движение РЛС со скоростью vc приводит к смещению частоты сигналов, отраженных
элементарными отражателями, Зависящему от угла  между направлением движения РЛС и осью
ДНА:
между направлением движения РЛС и осью
ДНА: 
Влияние флуктуаций пассивной
помехи, обусловленных движением РЛС, превосходит влияние флуктуаций, вызванных
другими причинами. Однако практически следует рассматривать воздействие всех
взаимодействующих факторов, что усложняет задачу оценки эффективности систем
СДЦ.
Из этого следует, что коэффициенты
подавления помех Кп и улучшения отношения сигнал/помеха Кс/п уменьшаются с ростом остаточного фона на выходе схемы
вычитания, обусловленного изменением амплитуды сигналов 
6.5. Методы повышения эффективности
систем СДЦ
Цифровая реализация схем
формирования и обработки сигналов позволяет существенно улучшить
характеристики РЛС, в частности их защищенность от пассивных помех. Для этого
наряду с применением сложных сигналов с внутриимпульсной модуляцией
и ФАР, обеспечивающих повышение пространственной селекции целей,
совершенствуют характеристики систем СДЦ. Для повышения эффективности систем
СДЦ современных РЛС применяют различные методы. Некоторые из них уже
рассматривались ранее. Остановимся на используемых методах более подробно.
Устранение зон «слепых» скоростей. Из
формулы 
(где п — целое число) следует, что при
радиальной скорости цели, при которой допплеровское смещение равно или близко к
значению  , отраженные от такой
цели сигналы будут подавлены режекторным фильтром СДЦ и цель может быть не
обнаружена или потеряна, если такая ситуация будет продолжаться длительное
время. Чтобы устранить такое положение, можно изменить несущую частоту
излучаемых колебаний
, отраженные от такой
цели сигналы будут подавлены режекторным фильтром СДЦ и цель может быть не
обнаружена или потеряна, если такая ситуация будет продолжаться длительное
время. Чтобы устранить такое положение, можно изменить несущую частоту
излучаемых колебаний  или частоту повторения импульсов Fп.
или частоту повторения импульсов Fп.
Этот способ, называемый вобуляцией
частоты, применялся в PJ1C с аналоговыми схемами формирования и обработки сигналов. С
внедрением цифровых методов формирования и обработки более целесообразно
применять дискретное изменение временного интервала между излучаемыми
импульсами. Такое изменение может производиться с различной периодичностью: от
импульса к импульсу; через период сканирования ДНА; через интервалы времени,
равные половине длительности пачки импульсов  принимаемых от объекта в процессе обзора. Важно при этом
свести к минимуму отрицательное влияние эффекта «слепых» скоростей.
принимаемых от объекта в процессе обзора. Важно при этом
свести к минимуму отрицательное влияние эффекта «слепых» скоростей.
Часто для этого используют
ступенчатое изменение интервала между зондирующими импульсами Тот импульса к
импульсу (которое обычно называют ступенчатым изменением частоты повторения).
Если интервалы между импульсами имеют величину Т1 Т2,
..., Тn и для последующих п
импульсов такое чередование повторяется, то при весовых коэффициентах а,
трансверсального фильтра его АЧХ можно записать
Конечно коэффициент подавления
помехи при таком ступенчатом изменении периода несколько снижается, однако
уменьшение потерь в обнаружении целей из-за «слепых» скоростей значительно
повышает эффективность системы СДЦ при сравнительно простых трансверсальных
фильтрах.
Изменение частоты повторения от
обзора к обзору легче осуществляется и позволяет решить задачу подавления
отражений от мешающих объектов, расположенных на дальностях  Сигналы, отраженные от этих объектов, появляются за пределами
данного периода повторения. При этом обычно используют две частоты повторения:
Сигналы, отраженные от этих объектов, появляются за пределами
данного периода повторения. При этом обычно используют две частоты повторения:  чередующиеся через время сканирования ДНА. Однако снижение
влияния «слепых» скоростей при этом значительно меньше, чем при ступенчатом
изменении периода от импульса к импульсу, и требует значительно большего
времени наблюдения. Смена частоты повторения через время, равное половине
длительности пачки, занимает промежуточное положение, т.е. требует меньшее
время для выхода из зоны «слепой» скорости. Эффективность применения этого метода
существенно повышается при его использовании совместно с применением набора
допплеровских фильтров и карты мешающих отражений.
чередующиеся через время сканирования ДНА. Однако снижение
влияния «слепых» скоростей при этом значительно меньше, чем при ступенчатом
изменении периода от импульса к импульсу, и требует значительно большего
времени наблюдения. Смена частоты повторения через время, равное половине
длительности пачки, занимает промежуточное положение, т.е. требует меньшее
время для выхода из зоны «слепой» скорости. Эффективность применения этого метода
существенно повышается при его использовании совместно с применением набора
допплеровских фильтров и карты мешающих отражений.
Набор допплеровских фильтров.
Использование набора из N фильтров, частотные характеристики которых
перекрывают допплеровские частоты в пределах от 0 до Fп, позволяет разделить сигналы по допплеровскому приращению
частоты, т.е. разделить объекты по их радиальной скорости. При этом появляется
возможность измерить эту скорость. За счет узкополосности допплеровских
фильтров улучшается и отношение полезного сигнала к шуму.
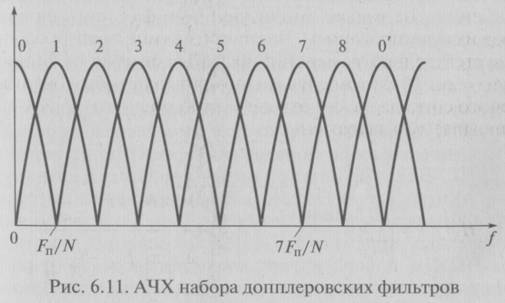
Для получения N пересекающихся АЧХ
может быть использован рассмотренный ранее трансверсальный фильтр с N отводами и п =
N - 1 элементами
(линиями) задержки с  , но с применением комплексных весовых коэффициентов. Эти
коэффициенты изменяют не только амплитуду, но и фазу сигналов на отводах
перед их суммированием. Часто при формировании набора АЧХ используется только
изменение фазы весовых коэффициентов с шагом
, но с применением комплексных весовых коэффициентов. Эти
коэффициенты изменяют не только амплитуду, но и фазу сигналов на отводах
перед их суммированием. Часто при формировании набора АЧХ используется только
изменение фазы весовых коэффициентов с шагом  . В этом случае с помощью преобразования
Фурье суммарного сигнала на отводе можно получить АЧХ А-го фильтра,
описываемую выражением
. В этом случае с помощью преобразования
Фурье суммарного сигнала на отводе можно получить АЧХ А-го фильтра,
описываемую выражением
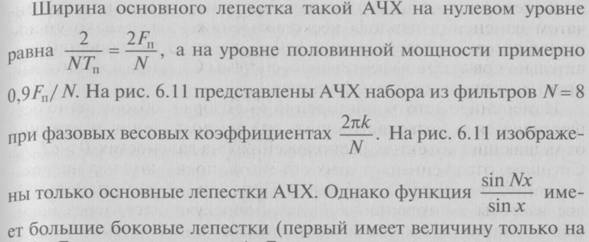 13,2 дБ меньше основного). Боковые лепестки ухудшают селективные
способности такого набора. Выбором весовых коэффициентов (изменением не только
фазы, но и амплитуды суммируемых сигналов) удается снизить отрицательное
влияние боковых лепестков. В этом отношении более эффективен рассмотренный
ранее фильтр ЧПК, который при меньшем наборе фильтров (N= 3) дает сравнимую величину
13,2 дБ меньше основного). Боковые лепестки ухудшают селективные
способности такого набора. Выбором весовых коэффициентов (изменением не только
фазы, но и амплитуды суммируемых сигналов) удается снизить отрицательное
влияние боковых лепестков. В этом отношении более эффективен рассмотренный
ранее фильтр ЧПК, который при меньшем наборе фильтров (N= 3) дает сравнимую величину  Для использования преимуществ того и другого методов борьбы
с пассивными помехами иногда применяют последовательное включение набора допплеровских
фильтров и фильтра ЧПК.
Для использования преимуществ того и другого методов борьбы
с пассивными помехами иногда применяют последовательное включение набора допплеровских
фильтров и фильтра ЧПК.
Следует заметить, что при
использовании БПФ для формирования АЧХ набора фильтров целесообразно выбирать N равным целой степени 2. Часто используют
значение N= 23 = 8, для которого на рис. 6.11 изображены АЧХ набора допплеровских
фильтров.
Формирование карты мешающих отражений. Формирование карты мешающих отражений
в оперативном запоминающем устройстве является одним из способов стабилизации
уровня ложных тревог путем автоматической установки порога обнаружения в
 соответствии с усредненным уровнем сигнала за предыдущие обзоры,
записанные для каждого элемента (или группы элементов) разрешения, где
пороговый уровень превышен. Эти усредненные сигналы в памяти и носят название
карты мешающих отражений поскольку усредненные сигналы сохраняются в тех
элементах разрешения, в которых размещаются отражатели, по крайней мере, в
течение времени усреднения. Такая карта облегчает подавление отражений от
земной поверхности и местных предметов, дающих устойчивые отражения в одних и
тех же элементах разрешения. При этом используется межобзорная корреляция таких
отражений для отделения их от флуктуирующих помех путем установления порога
радиальной скорости объекта, ниже которого отражения от объекта считаются
мешающими.
соответствии с усредненным уровнем сигнала за предыдущие обзоры,
записанные для каждого элемента (или группы элементов) разрешения, где
пороговый уровень превышен. Эти усредненные сигналы в памяти и носят название
карты мешающих отражений поскольку усредненные сигналы сохраняются в тех
элементах разрешения, в которых размещаются отражатели, по крайней мере, в
течение времени усреднения. Такая карта облегчает подавление отражений от
земной поверхности и местных предметов, дающих устойчивые отражения в одних и
тех же элементах разрешения. При этом используется межобзорная корреляция таких
отражений для отделения их от флуктуирующих помех путем установления порога
радиальной скорости объекта, ниже которого отражения от объекта считаются
мешающими.
Пороговое значение скорости, время
хранения карты и постоянная времени сглаживания при необходимости могут
регулироваться оператором на основе изображений на экране ИКО.
Достаточно универсальной является
трехканальная схема обработки сигналов в РЛС, содержащая канал без
компенсации, канал с подавлением отражений от местных предметов и канал с
адаптивным подавлением отражений от гидрометеоров.
Основой системы является карта
помех, частично обновляемая с каждым обзором, и определение допплеровского
сдвига для каждого элемента разрешения. Полученная информация используется для
автоматической подстройки полосы режекции адаптивного фильтра подавления
помех. Обновляемая карта помех используется также для адаптации порога
обнаружения с целью стабилизации уровня ложных тревог. В системе предусмотрено
считывание из памяти значений весовых коэффициентов фильтра подавления,
соответствующих текущему значению временных интервалов между импульсами
сигнала при изменении периода повторения зондирующих импульсов, что позволяет
максимизировать коэффициент подавления помех системой.
Конечно, для реализации этих
функций вычислительное устройство системы должно иметь достаточную емкость
памяти и быстродействие.
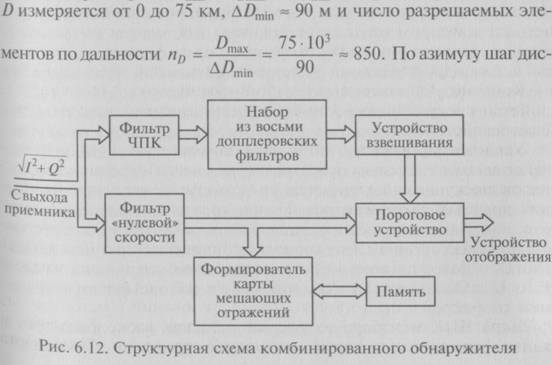
Универсальный обнаружитель
движущихся целей. В условиях воздействия разнообразных пассивных помех
надежное выделение сигналов движущихся целей, скорости которых изменяются в
широких пределах, возможно только при совместном использовании рассмотренных
способов повышения эффективности работы системы СДЦ. Впервые такой комбинированный
обнаружитель (MTD — Moving Target Detector) был применен в
американской РЛС КО. Обнаружитель РЛС содержит канал подавления отражений от
местных предметов и метеообразований, состоящий из фильтра ЧПК и набора из
восьми допплеровских фильтров, и канал формирования карты мешающих отражений.
Такая карта позволяет осуществить адаптивное управление пороговыми уровнями
обнаружения в отдельных элементах (или группах соседних элементов) разрешения
по дальности, азимуту и радиальной скорости. Упрощенная структурная схема
комбинированного обнаружителя представлена на рис. 6.12. На вход схемы
обнаружителя сигнал поступает с выхода приемного устройства, в котором после
УПЧ сигналы детектируются синхронным I и квадратурным Q фазовыми детекторами. После преобразования в цифровую форму десятиразрядным
АЦП и операции суммирования  сигналы подаются на двухканальный
обнаружитель. В первом канале фильтр ЧПК осуществляет подавление пассивных
помех с допплеровскими приращениями в окрестности нулевых значений. Набор
допплеровских фильтров с последующим взвешиванием и сравнением с адаптивным
порогом позволяет отделить сигналы целей с малыми допплеровскими приращениями
(при движении цели по траектории, перпендикулярной направлению на РЛС) от
сигналов, вызванных отражениями от дождя, стаи птиц или растительности.
сигналы подаются на двухканальный
обнаружитель. В первом канале фильтр ЧПК осуществляет подавление пассивных
помех с допплеровскими приращениями в окрестности нулевых значений. Набор
допплеровских фильтров с последующим взвешиванием и сравнением с адаптивным
порогом позволяет отделить сигналы целей с малыми допплеровскими приращениями
(при движении цели по траектории, перпендикулярной направлению на РЛС) от
сигналов, вызванных отражениями от дождя, стаи птиц или растительности.
Второй канал включает фильтр
«нулевой» скорости, выделяющий сигналы с малыми допплеровскими сдвигами,
которые после обработки в фильтре формирования карты мешающих отражений
запоминаются в ячейках памяти. При этом и создается электронная «карта помех»,
позволяющая управлять пороговыми уровнями соответствующих элементов
разрешения.
Число таких элементов определяется
диапазоном изменения дальности Д азимута а и радиальной скорости vr, а также разрешением по этим параметрам  Для рассматриваемой РЛС
Для рассматриваемой РЛС
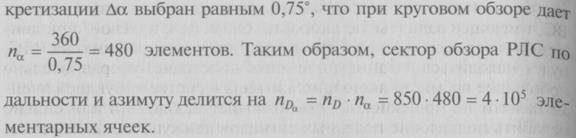 На одной дальности в течение времени поворота антенны на
На одной дальности в течение времени поворота антенны на  излучается 10 импульсов с частотой повторения
излучается 10 импульсов с частотой повторения  следующие 10 импульсов — с частотой Fп2. Затем снова Fп1 и т.д. Время излучения пачки
следующие 10 импульсов — с частотой Fп2. Затем снова Fп1 и т.д. Время излучения пачки
из 10 импульсов с постоянной
частотой повторения является интервалом когерентности. Именно в таком интервале
осуществляется обработка сигналов в фильтре ЧПК и наборе допплеровских
фильтров, позволяющих выделить восемь полос в спектре допплеровских приращений
в окрестности нулевых частот. При смене частоты повторения импульсов сигнал
цели, движущейся с малой радиальной скоростью, не только проходит через фильтр
ЧПК, но также через один из допплеровских фильтров набора. Это значительно
улучшает надежность обнаружения полезного сигнала движущейся цели, тем более
что при такой обработке устраняются мешающие отражения, вызванные предыдущими
зондирующими импульсами, задержка которых превышает Тп.
Весовая обработка в первом канале
обнаружителя позволяет снизить величину боковых лепестков АЧХ набора
допплеровских фильтров, что улучшает разрешение по радиальной скорости.
Дополнительно улучшение селективных характеристик обнаружителя обеспечивает
управление (адаптацию) пороговыми уровнями при изменении помеховых условий и
параметров движения целей. Для этого используется карта помех, формирование
которой происходит во втором канале обнаружителя, состоящем из так называемого
фильтра «нулевой» скорости, схемы формирования карты мешающих отражений и
устройства памяти, хранящего эту периодически обновляемую электронную карту.
Фильтр нулевой скорости позволяет
выделить сигналы с малыми допплеровскими приращениями, вызванные не только мешающими
отражателями, но и воздушными судами (ВС), траектории которых пересекают
направление на РЛС. Различие сигналов цели и помех заключается во времени их
существования в данном элементе разрешения. Для каждого из элементов разрешения
определяется уровень сигнала, записываемый в соответствующую ячейку памяти.
Этот уровень устанавливается путем накопления сигналов за десять оборотов
антенны, причем на каждом обороте добавляется 1/8 напряжения на выходе фильтра
«нулевой» скорости.
Таким образом, для неподвижного
объекта, расположенного в данном элементе разрешения, напряжение за десять
оборотов антенны достигает уровня, установленного для помехи, тогда как ВС,
имеющее радиальную скорость, близкую к нулевой, при движении по траектории,
перпендикулярной к направлению на РЛС, будет находиться в данном элементе
пространства сравнительно небольшое время и накопления сигнала в
соответствующей ячейке памяти не произойдет. Это позволяет исключить или
сильно ослабить подавление полезных сигналов движущихся целей в подобных
ситуациях.
На выходе схемы обнаружителя
формируется цифровой сигнал, код которого содержит координаты и скорость цели
для тех элементов разрешения, где в данное время находится цель. Для формирования
усредненных оценок на выходе обнаружителя предусмотрен процессор,
интерполирующий получаемые данные по дальности, азимуту и скорости.
Оцениваются также амплитуды
сигналов, что позволяет отделить сигналы, отраженные от ВС, от более слабых
сигналов, вызванных отражениями от птиц или насекомых, при одинаковых
значениях радиальных составляющих скорости их движения.
Дальнейшая фильтрация данных
осуществляется при вторичной обработке в компьютере, при которой вычисляются
траектории движения целей в секторе обзора PJIC. Эти траектории
воспроизводятся на экране дисплея или И КО, позволяя оператору выделить те,
которые соответствуют движению ВС.
С развитием цифровых технологий
алгоритм и схемы обработки сигналов обнаружителей непрерывно совершенствуются,
однако основные принципы их построения в основном сохраняются.
Влияние собственной скорости
перемещения РЛС на эффективность СДЦ. При расположении РЛС с системой СДЦ на движущемся
носителе (корабль, самолет) задача выделения сигналов ДЦ на фоне мешающих
отражений сильно усложняется, так как отраженные сигналы объектов получат
допплеровское смещение частоты за счет собственной скорости носителя РЛС vc.
При сканировании ДНА РЛС изменяется
не только величина допплеровского смещения Fv вместе с изменением радиальной составляющей собственной
скорости, но и ширина спектра допплеровских частот.
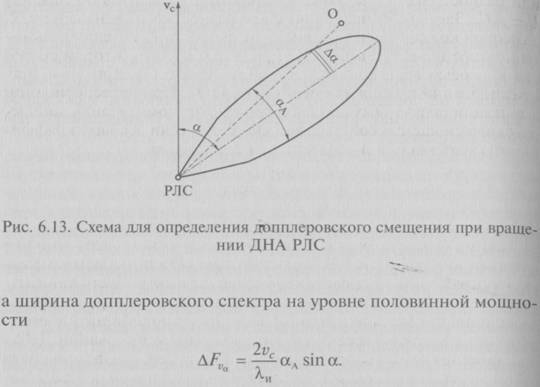
Для упрощения рассмотрим
расположение РЛС кругового обзора на движущемся корабле при обнаружении
морских объектов, когда направление на неподвижный отражатель (точка О на Рис.
6.13) определяется только азимутом. Если в рассматриваемый Момент ось
вращающейся ДНА составляет с вектором скорости vc Угол
 , а направление на объект (в пределах ширины ДНА
, а направление на объект (в пределах ширины ДНА  ) с ее осью угол
) с ее осью угол  , то допплеровское смещение частоты
, то допплеровское смещение частоты 
 Как уже упоминалось, задача выделения
сигнала ДЦ в этой ситуации может быть решена при использовании в качестве опорных
колебаний сигналов, отраженных неподвижными объектами, т.е. системы СДЦ с
внешней когерентностью. Такая система позволяет автоматически устранить
влияние собственной скорости РЛС, но обладает низкой эффективностью из-за
неустойчивости опорных колебаний.
Как уже упоминалось, задача выделения
сигнала ДЦ в этой ситуации может быть решена при использовании в качестве опорных
колебаний сигналов, отраженных неподвижными объектами, т.е. системы СДЦ с
внешней когерентностью. Такая система позволяет автоматически устранить
влияние собственной скорости РЛС, но обладает низкой эффективностью из-за
неустойчивости опорных колебаний.
Поэтому предложен ряд методов
компенсации влияния собственной скорости применительно к системам СДЦ с
внутренней когерентностью, позволяющих получить достаточную эффективность
функционирования таких систем при движении РЛС.
Первый из таких методов разработан
для самолетных обзорных РЛС и заключается в подстройке когерентного гетеродина
системы СДЦ под усредненную частоту сигналов, отраженных на протяжении
некоторого отрезка дальности неподвижными объектами или окружающими ДЦ
облаками, морскими волнами.
Другой, более эффективный, метод
компенсации влияния собственной скорости РЛС (DPCA
— Displaced Phase Center Antenna) заключается в
периодическом смещении фазового центра антенной системы при передаче и приеме
сигнала. Рассмотрим этот метод на примере антенны с двумя смещенными ДН (как
при равносигнальном методе пеленгования).
При излучении зондирующих импульсов
используется суммарная ДНА, т.е. импульсы излучаются одновременно обоими излучателями,
а при приеме отраженных сигналов образуется сумма или разность из суммарного и
разностного сигналов по правилу  Здесь j означает сдвиг фазы разностного сигнала на
Здесь j означает сдвиг фазы разностного сигнала на  , а весовой коэффициент к зависит от скорости носителя vc, частоты повторения импульсов РЛС Fn и угла а между вектором скорости vc и осью вращающейся ДНА (см. рис. 6.13), при этом знак
суммирования изменяется через период Тп. При череспериодном вычитании получаемых
сигналов происходит компенсация допплеровского смещения собственной скорости,
если весовые коэффициенты изменяются в соответствии с формулой
, а весовой коэффициент к зависит от скорости носителя vc, частоты повторения импульсов РЛС Fn и угла а между вектором скорости vc и осью вращающейся ДНА (см. рис. 6.13), при этом знак
суммирования изменяется через период Тп. При череспериодном вычитании получаемых
сигналов происходит компенсация допплеровского смещения собственной скорости,
если весовые коэффициенты изменяются в соответствии с формулой
 где dA — размер апертуры антенны.
где dA — размер апертуры антенны.
Таким образом теоретически можно
скомпенсировать влияние собственной скорости РЛС на эффективность подавления
мешающих отражений. На практике, однако, эффективность снижается за счет
изменения амплитуды сигналов при сканировании, из- за наличия боковых лепестков
ДНА, изменения ширины доппле- ровского спектра отраженных сигналов при
сканировании ДНА.
Применение ФАР позволяет снизить
потери эффективности путем изменения формы ДН в зависимости от изменяющейся по-
меховой обстановки в процессе обзора. При этом создается
пространственно-временной фильтр подавления нежелательных отражений. При
наличии необходимого вычислительного ресурса бортовой ЭВМ и многоэлементной ФАР
принципиально возможно создать адаптивную систему СДЦ, сохраняющую достаточно
высокую эффективность и при движении РЛС.
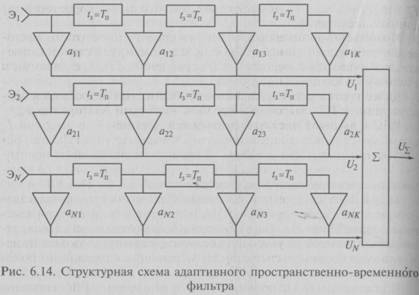
Действие такого адаптивного
пространственно-временного фильтра заключается в изменении положения нулей
(провалов) ДНА ФАР в зависимости от величины допплеровского смещения
принимаемых сигналов так, чтобы мешающие отражатели оказались на нулевых
направлениях и сигналы, отраженные от них, были подавлены или существенно
ослаблены. При этом одновременно осуществляется изменение весовых
коэффициентов  трансверсальных фильтров (рис. 6.14), которые включены на выходе
каждого из N элементов (Э) ФАР.
трансверсальных фильтров (рис. 6.14), которые включены на выходе
каждого из N элементов (Э) ФАР.
В процессе обзора РЛС происходит
сравнение сигналов на выходах каждого из А" фильтров с напряжением на выходе сумматора
 для установки
весовых коэффициентов фильтров
для установки
весовых коэффициентов фильтров  обеспечивающих максимальное отношение
сигналов ДЦ помехе. Одновременно происходит изменение амплитуды и фазы сигналов
в цепи элементов ФАР для обеспечения пространственной фильтрации,
способствующей подавлению мешающих отражений.
обеспечивающих максимальное отношение
сигналов ДЦ помехе. Одновременно происходит изменение амплитуды и фазы сигналов
в цепи элементов ФАР для обеспечения пространственной фильтрации,
способствующей подавлению мешающих отражений.
 Это сильно упрощенная схема работы
пространственно-временного фильтра, конфигурация которого на практике зависит
от условий работы РЛС, типа обнаруживаемых целей, возможных траекторий их
движения, помеховой обстановки в пространстве обзора РЛС и ее изменений в
процессе обзора.
Это сильно упрощенная схема работы
пространственно-временного фильтра, конфигурация которого на практике зависит
от условий работы РЛС, типа обнаруживаемых целей, возможных траекторий их
движения, помеховой обстановки в пространстве обзора РЛС и ее изменений в
процессе обзора.
6.6. Импульсно-допплеровские РЛС
В сложных условиях работы самолетных
РЛС, возникающих при необходимости обнаружения и определения параметров движения
целей на фоне разнообразных интенсивных мешающих отражений с широким диапазоном
допплеровских смещений частоты, оказывается целесообразным использование
импульсно- допплеровских РЛС с высокими и средними частотами повторения
импульсов.

Импульсно-допплеровские РЛС со
средними частотами повторения занимают промежуточное положение и, естественно,
имеют преимущества и недостатки по сравнению с РЛС с низкими и высокими
частотами повторения.
Далее кратко рассматриваются
особенности построения и эксплуатации РЛС с высокой и средней частотами
повторения Fп.
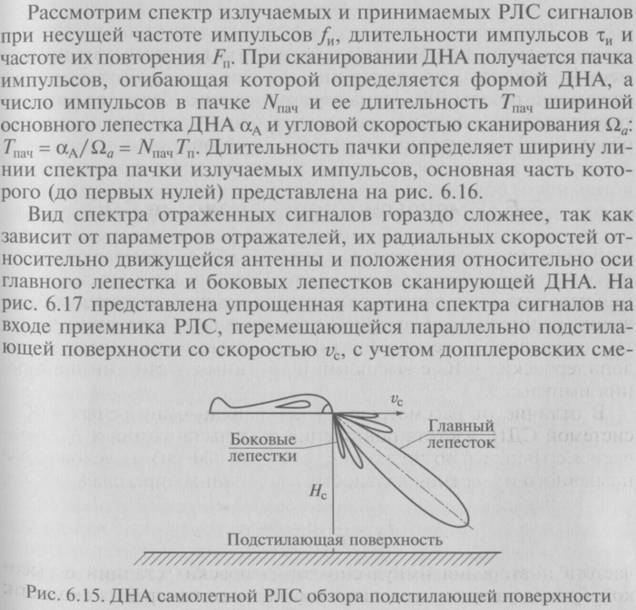
РЛС с высокой частотой повторения. Применение высокой Fп оказывается наиболее целесообразным в
самолетных РЛС при обнаружении целей при наличии мешающих отражений от подстилающей
поверхности (поверхности суши или моря, над которыми пролетает самолет или
другой носитель РЛС). На рис. 6.15 представлена ДНА самолетной обзорной РЛС в
момент, когда главный лепесток сканирующей ДНА отклонен вниз и по направлению
полета носителя. Также показан веер боковых лепестков, занимающих широкий
угловой сектор, что сильно усложняет помеховую обстановку за счет приема
мешающих сигналов по боковым лепесткам.
заключаются в большом частотном
интервале допплеровских приращений, свободном от мешающих отражений, и
отсутствии зон «слепых» скоростей в отличие от РЛС с низкой частотой повторения.
Важным преимуществом РЛС с высокой Fп является однозначность при определении
скорости целей.
Основными недостатками таких РЛС
являются необходимость создания антенн с очень низким уровнем боковых
лепестков, а также определенные трудности при решении задачи разрешения
многозначности при измерении дальности.
При выборе частоты повторения Fп таких станций основным является выполнение условия
однозначного измерения скорости целей в заданном диапазоне:
 Для РЛС истребителей-перехватчиков наиболее приемлем трехсантиметровый
диапазон волн, позволяющий получить необходимые точность и разрешающую
способность по угловым координатам при допустимых размерах антенны. При
Для РЛС истребителей-перехватчиков наиболее приемлем трехсантиметровый
диапазон волн, позволяющий получить необходимые точность и разрешающую
способность по угловым координатам при допустимых размерах антенны. При
 условие однозначности измерения
скорости выполняется при
условие однозначности измерения
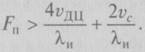
скорости выполняется при  Для самолетных РЛС обзора земной
поверхности выбор Fп определяется скоростью носителя vc и скоростью движущихся целей
Для самолетных РЛС обзора земной
поверхности выбор Fп определяется скоростью носителя vc и скоростью движущихся целей  относительно подстилающей поверхности.
Однозначные измерения скорости гарантируются при
относительно подстилающей поверхности.
Однозначные измерения скорости гарантируются при
 Это условие также выполняется при выборе Fп в указанных ранее пределах.
Это условие также выполняется при выборе Fп в указанных ранее пределах.
Для фильтрации допплеровских
приращений сигналов используется набор допплеровских фильтров, перекрывающих
частотный интервал возможных допплеровских смещений.
Выбор частот повторений Fп усложняется необходимостью разрешения неоднозначности,
возникающей при высоких Fп при измерении дальности целей. Для этого
надо иметь, по крайней мере, две частоты повторения. Однако более надежное
устранение неоднозначности гарантируется при трех частотах повторения, если их
величины находятся в целочисленных соотношениях при отсутствии общего делителя
этих величин.
Для РЛС с высокой Fп актуальна также проблема потерь, вызванных запиранием
приемника на время излучения импульсов. При увеличении Fп неизбежно
увеличивается и время прекращения приема сигналов, что следует учитывать при
выборе Fп, так как временные потери снижают дальность действия РЛС. Для
ее сохранения возникает необходимость повышения энергетического потенциала
РЛС, который оценивается произведением излучаемой мощности Ри на величину эффективной площади апертуры антенны Ап, как это следует из уравнения дальности РЛС. Конечно, это
связано с усложнением и увеличением стоимости PJIC, поэтому
целесообразно рассмотреть функциональные возможности импульсно-допплеровских
РЛС со средними Fп.
PJIC со средней частотой повторения. Такие PЛC используются на самолетах, работают в трехсантиметровом диапазоне
с частотами повторения 5...30 кГц и сочетают преимущества и недостатки PJIC с низкими и высокими частотами повторения. Прежде всего
следует констатировать наличие неоднозначности, а также «слепых» зон и по
дальности, и по скорости. Сокращается при этом и зона допплеровских смещений,
свободная от мешающих отражений, что имеет место при высоких Fп. Несмотря на очевидные недостатки использование PJIC со средними частотами повторения в некоторых случаях
оказывается целесообразным.
Для пояснения обратимся к рис.
6.17. Ясно, что с понижением Fп сократится интервал, свободный от
мешающих отражений (поскольку сблизятся линии спектра), что ухудшит условия
обнаружения целей, движущихся с большими скоростями (истребители на встречных
курсах). Однако с понижением Fп улучшаются условия обнаружения целей,
имеющих меньшие скорости относительно PJIC (морские и наземные
объекты, воздушные цели со стороны хвоста истребителя), поскольку при снижении Fп снижается и уровень мешающих сигналов, приходящих по боковым
лепесткам, так как уменьшается число импульсов, принимаемых по каждому из
лепестков. Таким образом, выбор средней частоты повторения Fп целесообразен для РЛС «защиты хвоста» на истребителях и РЛС
обзора земной поверхности.
Наряду с фильтрацией по допплеровскому
смещению применяется стробирование приемника по дальности. Это позволяет
подавить сильные отражения вблизи несущей частоты (в области центрального
выброса на рис. 6.17, соответствующего сигналам, отраженным от подстилающей
поверхности непосредственно под самолетом) и тем самым облегчить условия обнаружения
сигналов «медленных» целей в окрестности центрального выброса.
Наиболее сложной задачей при
средних значениях частоты повторения является разрешение неоднозначности по
дальности и скорости. Для гарантированного устранения неоднозначности трех
частот повторения (как в случае высоких значений Fп) уже недостаточно. В широком диапазоне измерения дальности
и скорости однозначность может быть обеспечена при наличии в РЛС семи или
восьми частот повторения, что существенно усложняет передатчик и устройство
обработки РЛС. Достаточно сказать, что смена частот повторения импульсов
заставляет менять и их длительность, чтобы сохранить постоянной среднюю
мощность генератора высокой частоты.
Для сохранения согласованной
обработки импульсов изменение их длительности вынуждает изменять и полосу
пропускания приемника.
Как и в случае РЛС с высокой
частотой повторения Fn, эффективная работа
импульсно-допплеровской РЛС со
средней частотой повторения возможна только при очень низком уровне боковых
лепестков ДНА.
Таким образом, применение средних
частот повторения целесообразно только при решении определенных задач, когда
надежное обнаружение целей не может быть достигнуто РЛС с низкой частотой
повторения и наличием системы СДЦ или импульсно-допплеровскими РЛС с высокой
частотой повторения.
Кроме РЛС
истребителей-перехватчиков, работающих в трехсантиметровом диапазоне, высокая
частота повторения импульсов успешно используется в станциях радиолокационной
разведки десятисантиметрового диапазона AWACS (Airborne Warning And Control System).
Необходимо обратить внимание на
сложность и высокую стоимость импульсно-допплеровских РЛС с высокой и средней
частотами повторения импульсов, в связи с чем их использование оправдано
только в случаях сложной помеховой обстановки, когда надежное наблюдение целей
невозможно обеспечить РЛС с низкой частотой повторения и системой СДЦ.
6.7. Самолетная РЛС обнаружения
воздушных и наземных целей
При выборе параметров самолетной
РЛС обнаружения воздушных и наземных целей при наличии разнообразных мешающих
отражателей перед разработчиком возникает ряд принципиальных вопросов.
Например, какую частоту повторения импульсов выбрать, поскольку от ее выбора
зависит построение РЛС и в конечном счете эффективность выполнения ею заданных
функций при приемлемых экономических показателях.
Остановимся подробнее на примере
выбора Fп самолетной РЛС обнаружения движущихся целей в передней
полусфере. Ясно, что условия обнаружения воздушных и наземных целей при этом
различны. При обнаружении воздушных целей мешающие отражения от подстилающей
поверхности воздействуют в основном по боковым лепесткам ДНА, и рациональным
выбором ее формы и метода обзора пространства эти помехи можно свести к приемлемому
Уровню.
Сложнее обстоит дело при
обнаружении целей, движущихся по поверхности суши или моря под самолетом, а
также воздушных целей, расположенных ниже носителя РЛС. В этих случаях мешающие
отражения будут приниматься и по основному лепестку ДНА, и их мешающее
воздействие будет максимальным. Это обстоятельство предопределяет выбор такой Fп, которая дает возможность надежного обнаружения цели в таких
ситуациях.
Наиболее трудные условия возникают
при обнаружении цели малых размеров, движущейся по поверхности Земли.
неоднозначность измерения скорости
использованием соответствующего набора допплеровских фильтров.
Для эффективной работы PJ1C при выполнении ею различных функций приходится изменять и
другие параметры излучаемых сигналов, а следовательно, и параметры устройств
приема и обработки отраженных сигналов.
Для примера рассмотрим, как решены
эти проблемы в американской РЛС
истребителя-перехватчика.
В станции предусмотрено изменение
параметров не только при переходе от работы по воздушным целям к обнаружению
наземных или морских, но и адаптация к различным условиям работы РЛС в каждом
из этих режимов. Так, при обнаружении воздушных целей, находящихся ниже
носителя РЛС (режим «вниз»), используется импульсно-допплеровская обработка со
средней частотой повторения, поскольку имеются мешающие отражения от подстилающей
поверхности и по главному, и по боковым лепесткам ДНА. При обнаружении целей
выше РЛС (режим «вверх») мешающие отражения от подстилающей поверхности
практически отсутствуют и возможно использование низкой частоты повторения Fп, обеспечивающей однозначное измерение дальности при эффективном
использовании энергии излучаемых сигналов и более простой обработке отраженных.
Предусмотрена также полная автоматизация обнаружения цели и ее сопровождения в
условиях воздушного боя.
В режиме «воздух—поверхность»
предусмотрена возможность обнаружения и идентификации наземных объектов. При
этом для исключения неоднозначности измерения и «слепых» скоростей используется
небольшое изменение несущей частоты (frequency agile mode). Для повышения
четкости получаемого изображения местности в режиме картографирования
предусмотрено «сжатие» ДНА за счет допплеровской обработки сигналов. При
обнаружении морских судов в условиях умеренного волнения моря применяется
некогерентная обработка сигналов с изменяющейся несущей, а при наличии сильных
мешающих отражений применяется когерентный режим СДЦ.
В РЛС предусмотрен также режим
запроса радиомаяков и обработка ответных сигналов, а также режим встречи
истребителя с самолетом-заправщиком.
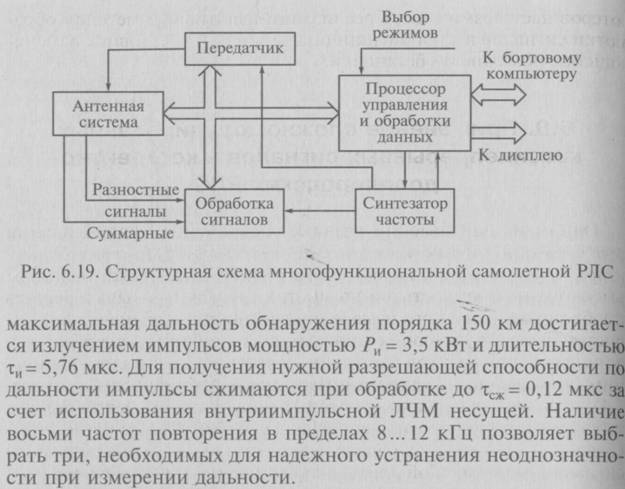
Многофункциональность РЛС
обеспечивается применением Управляемых ФАР, многорежимного когерентного
передатчика, адаптивного приемного устройства и цифрового процессора обработки
сигналов. Упрошенная структурная схема самолетной РЛС представлена на рис.
6.19.
РЛС работает в трехсантиметровом
диапазоне радиоволн, что позволяет при ограниченных размерах антенной системы
обеспечить требуемую угловую разрешающую способность. Необходимая
Когерентность излучаемых колебаний
гарантируется использованием высокостабильного задающего генератора
(синтезатора частоты), колебания которого усиливаются до необходимой мощности
усилителем с оконечным каскадом на лампе бегущей волны.
Антенная система представляет собой
ФАР с габаритными размерами 51x32 см, разделенную на четыре квадранта, что
позволяет сформировать четыре смещенных ДН, необходимых для реализации
моноимпульсного метода точного сопровождения цели по азимуту и углу места.
При поиске целей осуществляется
сканирование ДНА по азимуту и углу места механическим поворотом ФАР в секторе
±60°. Управление приводом ФАР от компьютера позволяет оперативно изменять
величину сектора обзора и скорость сканирования.
В блоке антенной системы
осуществляется также усиление и преобразование принимаемых сигналов. Таким
образом, на схему обработки поступают суммарные и разностные сигналы на
промежуточной частоте  для реализации моноимпульсного метода
сопровождения цели при их обработке. При этом сигналы преобразуются в цифровую
форму и вся дальнейшая обработка осуществляется на основе БПФ на 128 точек под
управлением программы компьютера РЛС.
для реализации моноимпульсного метода
сопровождения цели при их обработке. При этом сигналы преобразуются в цифровую
форму и вся дальнейшая обработка осуществляется на основе БПФ на 128 точек под
управлением программы компьютера РЛС.
Выбор режима работы РЛС
осуществляется переключением программы компьютера. Непрерывное
совершенствование компьютеров дает возможность реализации адаптивных методов
обработки сигналов в многофункциональных PЛC в условиях изменяющейся помеховой обстановки.
6.8. Применение сложномодулированных
квазинепрерывных сигналов в когерентно- допплеровских РЛС
Одним из направлений развития
современной радиолокации является применение когерентных сложномодулированных
квазинепрерывных сигналов, которые при низкой скважности обладают высокой
энергоемкостью и во многих случаях позволяют решить проблему однозначного
измерения дальностей и радиальных скоростей целей в широких диапазонах
изменения задержек х и допплеровских
сдвигов частоты fD отраженных сигналов. Напомним, что сложномодулированными,
или сложными (см. подразд. 4.4), называются сигналы, у которых модуляции
подвергаются два и более параметра. Квазинепрерывными будем считать сигналы,
скважность которых Q, равная отношению полной длительности сигнала тс к
суммарной длительности интервалов времени, в пределах которых амплитуда
сигнала не равна нулю, не превышает 10. В данном подразделе рассмотрены
амплитудно-фазоманипулированные
дискретно-кодированные сигналы с
двоичной амплитудной манипуляцией и бинарной фазовой манипуляцией. Манипуляция
параметра сигнала является частным случаем модуляции, при котором параметр
может принимать одно из набора фиксированных значений. Двоичная, или бинарная,
манипуляция предполагает, что модулируемый параметр сигнала может принимать
одно из двух возможных значений.
Как правило, в
амплитудно-фазоманипулированных сигналах манипуляция амплитуды используется для
организации работы приемника и передатчика РЛС на единую приемопередающую
антенну. Их совместное функционирование организовано так, что во время работы
передатчика (высокий уровень мощности,  приемник заперт. При отсутствии излучаемой мощности на выходе
передатчика
приемник заперт. При отсутствии излучаемой мощности на выходе
передатчика  приемник открыт и осуществляется прием отраженных сигналов.
Бинарная фазовая манипуляция сигнала используется для однозначного измерения
задержки и разрешения целей по дальности в рабочей зоне задержек. Структурная
схема когерентной РЛС с квазинепрерывным сложномодулированным зондирующим
сигналом представлена на рис. 6.20.
приемник открыт и осуществляется прием отраженных сигналов.
Бинарная фазовая манипуляция сигнала используется для однозначного измерения
задержки и разрешения целей по дальности в рабочей зоне задержек. Структурная
схема когерентной РЛС с квазинепрерывным сложномодулированным зондирующим
сигналом представлена на рис. 6.20.
Когерентность при формировании и
обработке сигналов обеспечивается применением высокостабильного задающего
генератора и единого когерентного гетеродина, с помощью которого сигнал
сначала переносится вверх на рабочую несущую частоту в передатчике, а затем
вниз на промежуточную частоту в приемнике. Y-циркулятор Ц
обеспечивает за счет специальной конструкции дополнительную развязку приемника
и передатчика (порядка 30 дБ). Кодирующие последовательности  генерируются в кодирующем устройстве. Радиосигнал
формируется на низкой частоте задающего генератора с помощью
амплитудно-фазового (АФ) модулятора. Для удобства обеспечения поочередной
работы приемника и передатчика в кодирующем устройстве формируются прямая Zu и инверсная
генерируются в кодирующем устройстве. Радиосигнал
формируется на низкой частоте задающего генератора с помощью
амплитудно-фазового (АФ) модулятора. Для удобства обеспечения поочередной
работы приемника и передатчика в кодирующем устройстве формируются прямая Zu и инверсная  последовательности, которые управляют работой электронных
ключей 1 и 2. Это делает невозможной одновременную работу приемника и
передатчика. Выходной сигнал приемника промежуточной частоты, равной частоте
задающего генератора, преобразуется с помощью фазового детектора в два
квадратурных
последовательности, которые управляют работой электронных
ключей 1 и 2. Это делает невозможной одновременную работу приемника и
передатчика. Выходной сигнал приемника промежуточной частоты, равной частоте
задающего генератора, преобразуется с помощью фазового детектора в два
квадратурных
синусно-косинусных сигнала SI и SQ на видеочастоте, которые образуют комплексный сигнал. В
устройстве обработки осуществляется согласованная корреляционная или фильтровая
обработка отраженных сигналов, как правило, в цифровом виде, для чего в
кодирующем устройстве формируются параллельно или последовательно задержанные
копии модулирующих амплитуду и фазу последовательностей с учетом трансформации
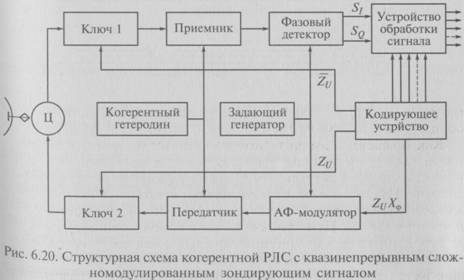
структуры отраженных сигналов за
счет квазинепрерывного режима работы РЛС.
На рис. 6.21 приведены примеры
сложных сигналов с амплитудно-фазовой манипуляцией (АФМн). На рис. 6.21, а в качестве примера приведен АФМн сигнал,
сформированный на основе двоичной амплитудной манипуляции по закону регулярной
импульсной последовательности (РИП) со скважностью Q = 2 и бинарной фазовой
манипуляции со случайным равновероятным законом переключения фазы на  . РИП характеризуется длительностью
. РИП характеризуется длительностью
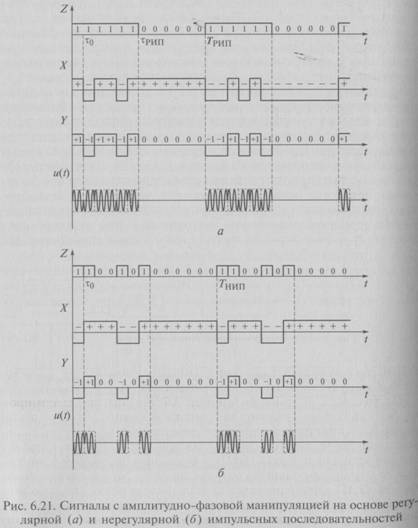
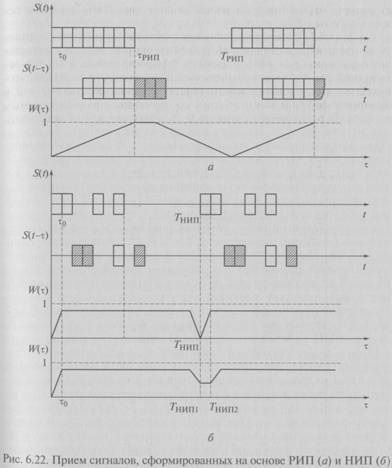
 На рис. 6.21, б приведен пример АФМн сигнала, сформированного
на основе двоичной амплитудной манипуляции по закону нерегулярной импульсной
последовательности (НИП) со свойством «не более одного совпадения» при любой
задержке сигналов, не кратной периоду НИП, и бинарной фазовой манипуляции со
случайным равновероятным законом переключения фазы
На рис. 6.21, б приведен пример АФМн сигнала, сформированного
на основе двоичной амплитудной манипуляции по закону нерегулярной импульсной
последовательности (НИП) со свойством «не более одного совпадения» при любой
задержке сигналов, не кратной периоду НИП, и бинарной фазовой манипуляции со
случайным равновероятным законом переключения фазы  НИП характеризуется длительностью элементарного импульса
НИП характеризуется длительностью элементарного импульса  , числом активных символов N0 с единичной амплитудой и периодом, выраженным числом
элементарных импульсов
, числом активных символов N0 с единичной амплитудой и периодом, выраженным числом
элементарных импульсов
 на основе НИП весьма привлекательными для организации квазинепрерывного
режима, поскольку гарантируется, что при любой задержке отраженных сигналов
перекрытие во времени с работой передатчика возможно только в пределах одного
элементарного импульса.
на основе НИП весьма привлекательными для организации квазинепрерывного
режима, поскольку гарантируется, что при любой задержке отраженных сигналов
перекрытие во времени с работой передатчика возможно только в пределах одного
элементарного импульса.
Одной из важнейших характеристик
квазинепрерывных сигналов при работе PЛC на одну антенну является функция приема Щт), представляющая
собой зависимость от задержки отношения той части энергии отраженного сигнала,
которая попадает на вход приемника, к полной энергии отраженного сигнала на выходе
антенны. Поясним это графически на приведенных примерах. Рассмотрим вначале
сигнал на основе РИП (рис. 6-22, а). Очевидно, что с ростом задержки в
пределах  растет относительная энергия сигнала, которая попадает на
вход приемника при выключенном передатчике, причем эта зависимость линейна,
так как линейно увеличивается площадь принимаемого сигнала, которая определяет
его энергию (заштрихованная область на рис. 6.22, а). Для сигнала на основе РИП
функция приема
растет относительная энергия сигнала, которая попадает на
вход приемника при выключенном передатчике, причем эта зависимость линейна,
так как линейно увеличивается площадь принимаемого сигнала, которая определяет
его энергию (заштрихованная область на рис. 6.22, а). Для сигнала на основе РИП
функция приема  имеет вид трапеции, достигая значения
имеет вид трапеции, достигая значения  Исключение составляет случай сигнала со скважностью Q = 2, когда
Исключение составляет случай сигнала со скважностью Q = 2, когда  принимает вид треугольника. Обычно для сигналов на основе
РИП рабочая зона задержек ограничена величиной
принимает вид треугольника. Обычно для сигналов на основе
РИП рабочая зона задержек ограничена величиной 
 Заметим, что вид функции приема для
сигналов на основе РИП удобен для компенсации мешающего влияния отражений от
подстилающей поверхности, находящейся в ближней зоне радиолокатора. Как
известно, мощность сигнала, отраженного от любой цели, в том числе поверхностно
распределенной, обратно пропорциональна четвертой степени дальности или задержки.
В то же время легко показать, что площадь облучаемого участка подстилающей поверхности,
попадающей в главный лепесток ДНА, возрастает линейно с увеличением дальности
или задержки. Следовательно, при малых углах скольжения в среднем линейно
возрастает ЭПР подстилающей поверхности, определяющая мощность отраженного
помехового сигнала. Суммарная зависимость интенсивности помехового сигнала от
задержки становится, таким образом, обратно пропорциональной третьей степени.
Функция приема вида треугольника или трапеции (см. рис. 6.22, а) обеспечивает
дополнительное энергетическое взвешивание помеховых сигналов, что улучшает
условия обнаружения удаленных целей на фоне пассивных помех от подстилающей
поверхности. Это особенно актуально в случае, когда полезный и мешающий
сигналы перекрываются в зоне действия боковых лепестков функции
неопределенности.
Заметим, что вид функции приема для
сигналов на основе РИП удобен для компенсации мешающего влияния отражений от
подстилающей поверхности, находящейся в ближней зоне радиолокатора. Как
известно, мощность сигнала, отраженного от любой цели, в том числе поверхностно
распределенной, обратно пропорциональна четвертой степени дальности или задержки.
В то же время легко показать, что площадь облучаемого участка подстилающей поверхности,
попадающей в главный лепесток ДНА, возрастает линейно с увеличением дальности
или задержки. Следовательно, при малых углах скольжения в среднем линейно
возрастает ЭПР подстилающей поверхности, определяющая мощность отраженного
помехового сигнала. Суммарная зависимость интенсивности помехового сигнала от
задержки становится, таким образом, обратно пропорциональной третьей степени.
Функция приема вида треугольника или трапеции (см. рис. 6.22, а) обеспечивает
дополнительное энергетическое взвешивание помеховых сигналов, что улучшает
условия обнаружения удаленных целей на фоне пассивных помех от подстилающей
поверхности. Это особенно актуально в случае, когда полезный и мешающий
сигналы перекрываются в зоне действия боковых лепестков функции
неопределенности.
Построение функции приема для
квазинепрерывного сигнала на основе НИП иллюстрирует рис. 6.22, б. Вначале  ) линейно возрастает в интервале задержек, не превышающих
длительность элементарного импульса:
) линейно возрастает в интервале задержек, не превышающих
длительность элементарного импульса:  . На этом участке зависимость для сигналов на основе НИП почти эквивалентна обычному импульсному
сигналу с длительностью импульса т0. Отличие заключается в том, что
для НИП, строго удовлетворяющей свойству одного совпадения, не достигает 1 и равна (N0- l)/N0. Основным
недостатком сигналов развязки приемника и передатчика на основе НИП является
наличие «слепых» дальностей, следующих с периодом Тнип. Для уменьшения их числа или полного устранения приходится
увеличивать период НИП, который определяется числом позиций кода N. Однако для
существующих НИП увеличение N ведет к существенному увеличению скважности Q: при N> 100 скважность увеличивается до 10 и более.
Компромиссом может служить вобуляция периода НИП путем добавления в конце
каждого периода кодовой последовательности нулевой позиции.
. На этом участке зависимость для сигналов на основе НИП почти эквивалентна обычному импульсному
сигналу с длительностью импульса т0. Отличие заключается в том, что
для НИП, строго удовлетворяющей свойству одного совпадения, не достигает 1 и равна (N0- l)/N0. Основным
недостатком сигналов развязки приемника и передатчика на основе НИП является
наличие «слепых» дальностей, следующих с периодом Тнип. Для уменьшения их числа или полного устранения приходится
увеличивать период НИП, который определяется числом позиций кода N. Однако для
существующих НИП увеличение N ведет к существенному увеличению скважности Q: при N> 100 скважность увеличивается до 10 и более.
Компромиссом может служить вобуляция периода НИП путем добавления в конце
каждого периода кодовой последовательности нулевой позиции.
Период НИП увеличивается на один
элементарный импульс, незначительно возрастает скважность, но «слепые» зоны также
смещаются. При когерентном накоплении сигнала на месте «слепых» зон функция
приема  . Свойство «не более
одного совпадения» сохраняется, поэтому функция приема в целом сохраняет свои
свойства, ее вид приведен на нижнем графике рис. 6.22, б.
. Свойство «не более
одного совпадения» сохраняется, поэтому функция приема в целом сохраняет свои
свойства, ее вид приведен на нижнем графике рис. 6.22, б.
Основной спецификой проектирования
РЛС с квазинепрерывными зондирующими сигналами малой скважности является
трансформация принимаемых сигналов при коммутации входа приемника сигналом
развязки, причем характер трансформации зависит от задержки сигнала. Поэтому
при анализе и синтезе как зондирующих сигналов, так и алгоритмов их обработки,
необходимо использовать функцию взаимной неопределенности (ФВН). Эта функция
характеризует степень корреляции двух различных сигналов на плоскости
параметров  в отличие от введенной ранее ФН, которая характеризует
степень корреляции сигнала и его копии, отличающейся только значениями этих
параметров.
в отличие от введенной ранее ФН, которая характеризует
степень корреляции сигнала и его копии, отличающейся только значениями этих
параметров.
6.9. Распознавание целей
Во многих случаях применения
радиолокации желательно не только обнаружить цель и определить ее координаты,
но и определить вид этой цели, т.е. произвести распознавание (опознавание)
цели.
При этом возможны два принципиально
отличающихся метода. В первом для опознавания цели используется ответчик, установленный
на обнаруживаемом объекте (самолете, корабле), который при облучении объекта
зондирующим сигналом РЛС формирует и излучает ответный сигнал, содержащий
необходимую информацию об объекте. Такие системы вначале использовались в
военной авиации для отличия своих самолетов от «чужих». В системах управления
воздушным движением кодированный сигнал ответчика может содержать не только
информацию о принадлежности самолета и его бортовом номере, но также и другие
сведения, необходимые для эффективного управления воздушным движением.
В системах распознавания второго
типа распознавание осуществляется на основе анализа характеристик отраженных
от цели сигналов при их обработке в РЛС. При этом используют связь статических,
динамических и статистических характеристик радиолокационного рассеяния
различных объектов (см. подразд. 2.2) с характеристиками сигналов, принимаемых
РЛС. Анализ отраженных сигналов при определенных условиях позволяет классифицировать
обнаруженные объекты, т.е. установить вид обнаруженного объекта: отличить
истребитель от бомбардировщика, военный корабль от танкера, баллистическую
ракету от ИСЗ.
Распознавание целей является
развитием рассмотренной ранее селекции цели на фоне мешающих отражателей,
наличие которых естественно затрудняет распознавание. Поэтому для распознавания
необходимо прежде всего обеспечить достаточно большое отношение сигнала к
помехе. Второе важнейшее требование к РЛС — высокая разрешающая способность по
измеряемым координатам и составляющим вектора скорости. Распознавание целей в
общем случае основано на расположении и взаимном перемещении центров
отражения, воспроизводимых на радиолокационном изображении цели на экране
дисплея. При этом используется анализ изменений комплексной характеристики
отраженных сигналов (сигнатуры) во времени.
В зависимости от типа РЛС и
обнаруживаемых целей различают случаи анализа одномерных и двухмерных
изображений. РЛС с высокой разрешающей способностью и точностью по дальности
позволяет воспроизвести профиль цели по дальности, что дает возможность
осуществить распознавание кораблей по их длине и контуру надстроек при
определенных ракурсах относительно РЛС. При этом необходима разрешающая
способность по дальности порядка единиц метров, наличие библиотеки образцов
профилей различных целей для разных ракурсов, что требует большого объема
памяти. Таким образом, одномерный анализ пригоден для распознавания кораблей с
небольшой скоростью маневрирования.
Создание четкого двухмерного
изображения целей требует высокой разрешающей способности не только по
дальности, но и по направлению, т.е. угловой разрешающей способности. Требуемое
для распознавания целей разрешение на значительных расстояниях от РЛС
достижимо только при синтезированных апертурах. Такое синтезирование возможно
при относительном перемещении антенны РЛС и цели. Самолетные (спутниковые) РЛС
бокового обзора с синтезированной апертурой позволяют получить четкое
радиолокационное изображение местности по обе стороны линии пути (проекции
траектории на подстилающую поверхность) носителя РЛС и распознать на этом
изображении отдельные объекты. Принцип действия таких РЛС рассмотрен в подраз.
8.5. 'фи неподвижной РЛС высокое разрешение по направлению можно получить при
сканирующей ДНА РЛС инверсным синтезированием раскрыва. При этом необходимо
достаточно большое время интегрирования принимаемых сигналов, что не является
серьезным ограничением при наблюдении кораблей в отличие от быстро
перемещающихся воздушных целей.
Для распознавания кораблей могут
быть использованы специфические изменения параметров отраженных сигналов при
бортовой и килевой качке корабля. При качке допплеровские сдвиги частотных
составляющих спектра сигналов, отраженных от мачт, надстроек и корпуса корабля,
отличаются между собой, и при наличии статистических данных о допплеровском
смещении сигналов для кораблей разных классов при различных ракурсах и характере
волнения возможно осуществить распознавание классов кораблей.
Распознавание самолетов сложнее,
чем кораблей, поскольку самолет обычно имеет меньшие размеры и меньшее число
центров отражения и не имеет таких свойственных кораблям признаков, как
качка. Кроме того, самолеты перемещаются в трехмерном пространстве с высокой
скоростью, что ограничивает возможность использования PJIC с инверсным синтезированием апертуры. Эффективным для
распознавания самолетов оказывается использование МПРЛС. Даже применение
двухпозиционной РЛС с вынесенным приемником позволяет получить контур наблюдаемого
самолета при достаточно большой базе системы.
Радикального повышения разрешающей
способности, а следовательно и детальности радиолокационных изображений, позволяет
достигнуть переход в миллиметровый диапазон радиоволн, в котором при применении
широкополосных сигналов и приемлемых размерах апертуры антенной системы можно
воспроизвести контур цели.
Однако в условиях атмосферы и
особенно при наличии осадков миллиметровые волны можно использовать лишь на
сравнительно небольших дальностях.
PЛC миллиметрового диапазона эффективно используются для обзора
летного поля аэропортов или акватории морских портов. В этих случаях они
обеспечивают наблюдение за перемещением самолетов или судов, а учитывая наличие
радиосвязи или ответчиков на борту, и надежное опознавание наблюдаемых
объектов. РЛС миллиметрового диапазона используются также для наблюдения за
полем боя для оперативного управления войсками.
Большие возможности РЛС
миллиметрового диапазона открываются при обнаружении и опознавании космических
объектов, что подтвердилось при эксплуатации РЛС «Руза», рассмотренной в
подразд. 8.4.
Для распознавания радиолокационных
объектов используются различные изменения характеристик отраженных сигналов,
обусловленные специфическими свойствами этих объектов. Периодические
изменения амплитуды сигналов, связанные с вращением винтов самолетов или
вертолетов, позволяют отличить их друг от друга и от реактивных самолетов.
Отраженные сигналы от последних также могут быть модулированы по амплитуде,
если в зоне облучения оказываются турбины турбореактивных двигателей. Частоты
модуляции при этом существенно выше, чем в случае винтомоторных самолетов.
Траектория движения объектов,
скорость их перемещения по траектории также могут служить признаком для
распознавания целей при их сопровождении на достаточно большом интервале
времени. Этот метод используется для распознавания баллистических ракет и ИСЗ
среди других космических объектов. Особое значение имеет надежное распознавание
баллистических ракет и особенно на восходящем участке траектории их полета. Для
этого совместно с наземными РЛС ПРО используются и РЛС, размещенные на ИСЗ, которые
позволяют обнаружить и сопровождать ракету от момента ее запуска.
Подводя итог, следует подчеркнуть,
что для распознавания целей используются самые разнообразные эффекты,
изменяющие спектр отраженных сигналов. Для иллюстрации можно сослаться на использование
для распознавания некоторых объектов гармоник, появляющихся в спектре
отраженных сигналов из-за детекторного эффекта, возникающего на стыках двух
разнородных металов. Тонкий анализ спектра возможен при высоком быстродействии
и большом объеме памяти цифровых устройств обработки РЛС. Параметры
зондирующих сигналов РЛС должны обеспечивать ее высокую пространственную,
временную и частотную селективности. Большое значение для надежного
распознавания объектов имеет возможность использования совместно с радиолокационной
также и других видов информации.
Контрольные
вопросы
1.Каковы возможные способы
уменьшения влияния пассивных помех на наблюдаемость радиолокационных целей?
2.В чем заключается принцип СДЦ?
3.Чем отличаются системы СДЦ с
внешней и внутренней когерентностями?
4.Для чего необходим когерентный
гетеродин в когерентно-импульсных системах СДЦ?
5,В чем заключается недостаток
однократной схемы ЧПК?
6.Каковы пути повышения
эффективности систем СДЦ?
7.В чем заключаются достоинства
цифровых фильтров подавления пассивных помех?
8.Как определить требуемое число
разрядов цифрового фильтра ЧПК?
9.Каким требованиям должны
удовлетворять параметры основных узлов когерентно-импульсной системы СДЦ?
10.Каково влияние флуктуаций
амплитуды сигналов, а также собственной скорости носителя РЛС на эффективность
СДЦ?
11.Определите значение «слепых»
скоростей для РЛС с СДЦ, работающей на волне 3 см с периодом повторения импульсов 1 мс.
12.Каким образом можно исключить
влияние «слепых» скоростей?
13.Почему использование
коэффициента улучшения для оценки эффективности СДЦ предпочтительнее
коэффициента подавления?
14.В чем заключаются преимущества и
недостатки РЛС со средней и высокой частотами повторения по сравнению с РЛС с
низкой частотой повторения?
15.В каких случаях целесообразно
применение импульсно-допплеровских РЛС с высокой и средней частотами
повторения?
16.Почему в импульсно-доплеровских
РЛС необходимо применять несколько частот повторения? В каких соотношениях эти
частоты должны находиться и почему?
17.Почему в импульсно-допплеровских
РЛС предъявляются очень высокие требования к уровню боковых лепестков ДНА?
РАДИОТЕХНИЧЕСКИЕ МЕТОДЫ И УСТРОЙСТВА
ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ ОБЪЕКТОВ
7.1. Импульсный метод измерения
временной задержки
Как уже отмечалось ранее, в основе
измерения дальности радиотехническими методами лежит измерение времени
задержки радиосигнала  , которое при известной скорости с распространения радиоволны
прямо пропорционально расстоянию D oт источника
радиосигнала до приемного устройства, на выходе которого и производится
измерение тем или другим способом. В активных РЛС время задержки
, которое при известной скорости с распространения радиоволны
прямо пропорционально расстоянию D oт источника
радиосигнала до приемного устройства, на выходе которого и производится
измерение тем или другим способом. В активных РЛС время задержки  пропорционально удвоенному расстоянию D, поскольку время задержки измеряется от
момента излучения зондирующего сигнала РЛС до приема отраженного
(переизлученного) объектом сигнала.
пропорционально удвоенному расстоянию D, поскольку время задержки измеряется от
момента излучения зондирующего сигнала РЛС до приема отраженного
(переизлученного) объектом сигнала.
В радионавигационных дальномерных
системах беззапросного типа измеряется время задержки от момента излучения
радиосигнала опорной станцией, расположенной на Земле или ИСЗ, до его приема
на объекте, определяющем свое местоположение. В этом случае время задержки связано с расстоянием от опорной станции до объекта D соотношением  В
разностно-дальномерных РНС измеряется разность времени задержки сигналов,
принимаемых от двух опорных станций:
В
разностно-дальномерных РНС измеряется разность времени задержки сигналов,
принимаемых от двух опорных станций:

Наиболее прост импульсный метод
измерения временной задержки, применение которого наиболее естественно в
системах с импульсной модуляцией радиосигналов. Именно такой метод применен в
РЛС КО, рассмотренной в гл. I в качестве примера, поясняющего принцип
определения дальности и азимута в двухкоординатной РЛС обнаружения. В такой
станции время задержки отраженного целью сигнала измеряется по положению
яркостной отметки цели на развертке дальности И КО, начало которой соответствует
моменту излучения зондирующего импульса. Если скорость развертки дальности vp = const, то время задержки принятого импульсного сигнала будет пропорционально расстоянию на экране ЭЛТ от начала
развертки до отметки цели. Это расстояние может быть измерено с помощью
механических или электронных меток визуально. Такой метод не может быть
точным, так как даже при наличии электронной метки в виде кольца, совмещаемого
при измерении с яркостной отметкой цели, погрешность измерения дальности будет
значительной из-за погрешности совмещения даже в отсутствии помех и других
факторов, влияющих на задержку сигнала.
В гл. 4 показано, что потенциальная
точность измерения временной задержки сигнала со случайной фазой (что имеет
место в некогерентных РЛС) на фоне помехи в виде НБШ определяется эффективной
шириной спектра сигнала  и отношением сигнала к шуму на выходе СФ
и отношением сигнала к шуму на выходе СФ
Таким образом, повышения точности
измерения дальности можно достигнуть расширением спектра и увеличением энергии
излучаемых сигналов. Расширение спектра можно получить сокращением длительности
сигнала. При этом для сохранения требуемого значения q придется увеличивать пиковую мощность, однако возможности
на этом пути крайне ограничены. Как известно, эти противоречия разрешаются при
использовании внутриимпульсной модуляции частоты или фазы колебаний высокой
частоты, позволяющей обеспечить требуемое произведение  для получения заданных значений максимальной дальности,
точности и разрешающей способности по дальности. Кроме ширины спектра и энергии
сигнала при проектировании импульсной радиолокационной станции должны быть
выбраны частота повторения импульсов Fп, время обзора То, способ измерения
времени задержки сигнального импульса и отображения измеренного значения
дальности.
для получения заданных значений максимальной дальности,
точности и разрешающей способности по дальности. Кроме ширины спектра и энергии
сигнала при проектировании импульсной радиолокационной станции должны быть
выбраны частота повторения импульсов Fп, время обзора То, способ измерения
времени задержки сигнального импульса и отображения измеренного значения
дальности.
Выбор частоты повторения обычно
определяется требованием однозначного измерения дальности. Если задана
максимальная дальность действия РЛС  , то однозначное измерение обеспечивается при выполнении
условия:
, то однозначное измерение обеспечивается при выполнении
условия: 
Это ограничение влияет и на выбор
скорости обзора, если измерение дальности производится в процессе обзора, поскольку
число накапливаемых импульсов пачки  , определяющее
величину q, связано с угловой скоростью сканирования
ДНА
, определяющее
величину q, связано с угловой скоростью сканирования
ДНА  и ее шириной
и ее шириной  формулой
формулой

Таким образом, выбор частоты
повторения должен удовлетворять также условию  в котором число импульсов в пачке и скорость сканирования
в котором число импульсов в пачке и скорость сканирования  определяются заданными максимальной дальностью действия РЛС
и темпом обзора, а — требуемой точностью и разрешающей способностью по
азимуту.
определяются заданными максимальной дальностью действия РЛС
и темпом обзора, а — требуемой точностью и разрешающей способностью по
азимуту.
Нарушение условия однозначности
(формула (7.1)) ведет к усложнению системы, так как для устранения
неоднозначности измерения дальности приходится применять две или более частоты
повторения импульсов, что приходится делать в когерентно импульсных РЛС со
средней и высокой частотами повторения с целью борьбы с пассивными помехами.
Рассмотрим, какие причины влияют на
точность измерения дальности импульсным методом с помощью индикаторов на ЭЛТ.
Прежде всего обратимся к РЛС КО, в которой дальность определяется в процессе
обзора по изображению на экране И КО. Точность измерения дальности при этом
значительно ниже потенциально возможной, определяемой шириной спектра сигнала
и отношением сигнал/шум. Дополнительные погрешности связаны с синхронизацией
развертки дальности, нестабильностью ее скорости и способом отсчета положения
яркостной отметки цели. Если имеются задержки сигнала в приемном тракте  и начала развертки дальности относительно момента излучения зондирующего
импульса, то естественно возникает соответствующая погрешность измерения
и начала развертки дальности относительно момента излучения зондирующего
импульса, то естественно возникает соответствующая погрешность измерения  .
.
Кроме того, существенную
погрешность вносит неточное совмещение метки дальности с отметкой цели.
Значение этой погрешности зависит от диаметра пятна на экране ЭЛТ, определяемого
качеством фокусирования, скоростью развертки дальности и ее стабильностью во
времени. Если обозначить среднеквадратичное значение погрешности синхронизации
(начала развертки)  , погрешности из-за изменяющейся задержки в приемном тракте
и погрешности отсчета , то при независимости указанных ошибок
погрешность измерения дальности будет определяться значением результирующей погрешности
измерения временной задержки
, погрешности из-за изменяющейся задержки в приемном тракте
и погрешности отсчета , то при независимости указанных ошибок
погрешность измерения дальности будет определяться значением результирующей погрешности
измерения временной задержки  :
:

Более высокую точность измерения
дальности можно получить при использовании индикатора с линейной разверткой и
отметкой цели, получаемой отклонением луча. В этом случае можно существенно
уменьшить погрешность отсчета, который обычно производится по переднему фронту
сигнального импульса. Выбирая соответствующую шкалу дальности индикатора, т.е.
изменяя скорость развертки и соответственно масштаб изображения, можно
Радикально снизить погрешность отсчета. Однако в современных РЛС индикатор с
линейной разверткой используется редко (обычно в качестве устройства контроля
работы аппаратуры при ее испытаниях и настройке).
Точное измерение дальности
обеспечивается с помощью следящих дальномеров, осуществляющих автоматическое
измерение временной задержки аналоговым или цифровым способом в режиме точного
сопровождения цели. В этом режиме в течение времени измерения ось ДНА
совмещается с направлением на цель, т.е. одновременно осуществляется
автоматическое слежение за целью и по угловым координатам, что позволяет получить
требуемое для заданной точности измерения дальности и азимута число
накапливаемых импульсов.
7.2. Автоматическое сопровождение цели
по дальности
В настоящее время чаще используют
автоматические дальномеры цифрового типа, однако для лучшего понимания
принципа построения замкнутой системы автоматического сопровождения целей по
дальности целесообразно сначала рассмотреть аналоговый вариант такой системы.
Структурная схема следящего
измерителя дальности (СИД) РЛС представлена на рис. 7.1, а, а временные
диаграммы ее работы на рис. 7.1, б. Непосредственно схема СИД выделена
пунктиром.
Режиму слежения предшествует режим
поиска сигнала цели на оси времени (по дальности) перемещением селекторных
импульсов
 до момента попадания сигнала цели на выходе приемника в пределы
селекторных импульсов, открывающих селектор дальности. При этом импульсы
сигнала
до момента попадания сигнала цели на выходе приемника в пределы
селекторных импульсов, открывающих селектор дальности. При этом импульсы
сигнала  поступают на временной дискриминатор, осуществляется захват
цели и переход СИД в режим слежения. В режиме слежения на выходе временного
дискриминатора выделяется напряжение сигнала ошибки
поступают на временной дискриминатор, осуществляется захват
цели и переход СИД в режим слежения. В режиме слежения на выходе временного
дискриминатора выделяется напряжение сигнала ошибки  определяемое величиной и знаком смещения сигнального
импульса относительно оси селекторных импульсов. Это напряжение подается на
экстраполятор, состоящий из интегрирующих и корректирующих звеньев. Число интеграторов
определяет порядок астатизма СИД, а следовательно, и точность сопровождения
цели, т.е. точность совмещения селекторных импульсов, создаваемых схемами
задержки (синтезатором задержки) и формирования, с сигнальными импульсами
цели. Обычно число интеграторов в схеме экстраполятора не превышает двух, что
достаточно для исключения динамических погрешностей по положению и скорости.
При сложных траекториях маневренных объектов может потребоваться и третье
интегрирующее звено для устранения погрешности, обусловленной ускорением.
определяемое величиной и знаком смещения сигнального
импульса относительно оси селекторных импульсов. Это напряжение подается на
экстраполятор, состоящий из интегрирующих и корректирующих звеньев. Число интеграторов
определяет порядок астатизма СИД, а следовательно, и точность сопровождения
цели, т.е. точность совмещения селекторных импульсов, создаваемых схемами
задержки (синтезатором задержки) и формирования, с сигнальными импульсами
цели. Обычно число интеграторов в схеме экстраполятора не превышает двух, что
достаточно для исключения динамических погрешностей по положению и скорости.
При сложных траекториях маневренных объектов может потребоваться и третье
интегрирующее звено для устранения погрешности, обусловленной ускорением.
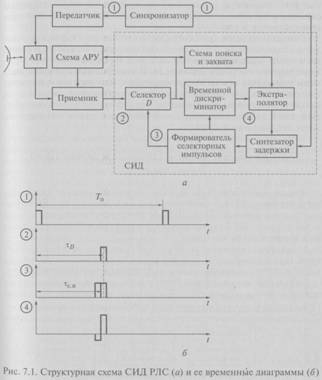
При работе СИД в условиях
воздействия флуктуационных помех полезно сужать ее полосу пропускания, однако
при этом следует учитывать, что значительную часть времени СИД работает в
переходном режиме, требующем расширения полосы.
Следует подчеркнуть, что в
аналоговых СИД точность сопровождения снижается из-за влияния различных
дестабилизирующих факторов, поэтому все шире используются СИД цифрового типа,
обеспечивающие более точное и стабильное сопровождение цели. При их применении
проще осуществляется сопряжение с компьютером, на который возможно также
возложить часть функций СИД.
Ясно, что точность оценки
ограничена периодом временной дискретизации. Кроме того, простое преобразование
временной задержки в цифровой код не позволяет стробировать приемник в
соответствии с изменяющейся задержкой  при движении цели. Для этого необходима
замкнутая следящая система цифрового типа, т.е. цифровой СИД.
при движении цели. Для этого необходима
замкнутая следящая система цифрового типа, т.е. цифровой СИД.
Структурная схема одной из
возможных реализаций цифрового СИД представлена на рис. 7.2. В схеме пунктиром
выделены временной дискриминатор, экстраполятор, синтезатор задержки и
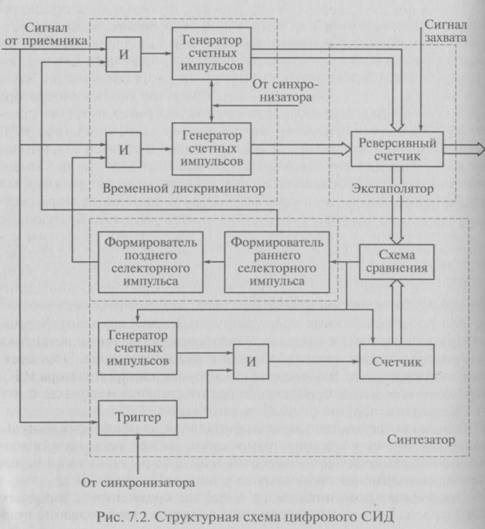 схема формирования селекторных импульсов. В режиме сопровождения
цели происходит сравнение цифровых кодов реверсивного счетчика, управляемого от
временного дискриминатора, и счетчика, в котором код обновляется каждый период
повторения импульсов РЛС.
схема формирования селекторных импульсов. В режиме сопровождения
цели происходит сравнение цифровых кодов реверсивного счетчика, управляемого от
временного дискриминатора, и счетчика, в котором код обновляется каждый период
повторения импульсов РЛС.
Временной дискриминатор состоит из
двух схем И, на которые подаются сигналы с выхода приемника РЛС и селекторные
импульсы от формирователя селекторных импульсов. На выходах схем И создаются
положительное и отрицательное напряжения, разность которых пропорциональна
временному рассогласованию положений сигнала цели и оси селекторных импульсов.
Напряжения преобразуются в пропорциональные числа счетных импульсов
генераторами счетных импульсов. Эти импульсы подаются на суммирующий и
вычитающий входы реверсивного счетчика, меняя его показания в соответствии со
знаком и величиной временного рассогласования сигнального и селекторных импульсов.
Таким образом, реверсивный счетчик
играет роль экстраполятора СИД, показания которого в виде цифрового кода
соответствуют оценке дальности цели. Начало слежения определяется установкой
исходного состояния реверсивного счетчика кодом, поступающим от схемы поиска и
захвата цели на сопровождение.
Синтезатор задержки цифрового СИД
состоит из генератора счетных импульсов, схемы И, триггера, счетчика и схемы
сравнения. Триггер открывается импульсом от синхронизатора РЛС одновременно с
излучением зондирующего импульса и закрывается поступающим с выхода приемника
сигналом цели. Таким образом, триггер формирует импульс длительностью  , который открывает на
это время схему И, и импульсы от генератора счетных импульсов поступают на
счетчик синтезатора, преобразующего время задержки xD в цифровой код. В схеме сравнения с этим кодом сравнивается
код реверсивного счетчика, и при их совпадении формируются селекторные
импульсы. Таким образом, образуется замкнутая следящая система, в которой
функции единственного интегратора выполняет синтезатор задержки.
, который открывает на
это время схему И, и импульсы от генератора счетных импульсов поступают на
счетчик синтезатора, преобразующего время задержки xD в цифровой код. В схеме сравнения с этим кодом сравнивается
код реверсивного счетчика, и при их совпадении формируются селекторные
импульсы. Таким образом, образуется замкнутая следящая система, в которой
функции единственного интегратора выполняет синтезатор задержки.
В момент совпадения кодов импульсом
запуска схемы формирования селекторных импульсов осуществляется также
остановка генератора счетных импульсов и счетчика синтезатора. Этот счетчик
снова запускается очередным импульсом синхронизатора РЛС, что позволяет жестко
синхронизировать счетные импульсы с моментом излучения зондирующих импульсов.
Однако погрешность, обусловленная
периодом счетных импульсов, сохраняется и в замкнутом режиме. Для ее
уменьшения возможно использовать дополнительный интегрирующий счетчик или
непосредственно увеличить частоту дискретизации СИД.
Преимуществом цифрового СИД по
сравнению с простым преобразованием  в цифровой код является стробирование приемного
канала на короткое время длительности селекторных импульсов, что улучшает
точность сопровождения за счет снижения уровня помех.
в цифровой код является стробирование приемного
канала на короткое время длительности селекторных импульсов, что улучшает
точность сопровождения за счет снижения уровня помех.
При использовании в РЛС или РНС
сложных фазоманипулированных (ФМ) сигналов в СИД применяется двухканальная корреляционная
обработка ФМ сигналов, что позволяет осуществлять автоматическое определение
задержки с точностью до фазы несущих колебаний сигнала. Такие схемы применяются
в приемо- индикаторах спутниковой радионавигационной системы, и их построение
рассмотрено в гл. 11. Рассмотренные ранее упрощенные структурные схемы
автодальномеров позволяют понять принципы работы систем автосопровождения,
однако при их практическом использовании в составе бортовых РЛС и комплексов
радиоуправления алгоритмы обработки усложняются, поскольку должны учитывать
изменяющиеся условия работы, что вызывает значительные трудности при
разработке систем высокой точности и надежности.
Достижения последних лет в создании
сверхманевренных летательных аппаратов, снижение их радиолокационной
заметности, необходимость одновременного автоматического сопровождения
нескольких целей в режиме обзора, расширение ассортимента радиопомех
потребовало разработки алгоритмов автоматического сопровождения, обеспечивающих
высокую эффективность оценивания дальности и скорости в условиях изменяющейся
обстановки работы РЛС. При разработке таких алгоритмов используются различные
теоретические подходы, основанные на представлении процессов в многомерном
пространстве состояний с использованием математического аппарата
статистической теории оптимального оценивания, идентификации и адаптации.
При синтезе системы в пространстве
состояний необходимо последовательно решить следующие задачи.
1.Выбрать исходные модели
интересующих процессов и синтезируемых систем, тип первичных измерителей
(датчиков информации), статистические характеристики возмущений (помех),
условия применения проектируемой системы и связанные с ними ограничения.
2.Выбрать критерий оптимизации
процессов.
3.Сформировать алгоритмы
функционирования системы, оптимальные по выбранному критерию с учетом
ограничений, связанных с условиями работы системы.
Для синтеза систем используется
теория оценивания, из которой известно, что формирование оценки
непосредственно в момент текущего измерения является процессом фильтрации,
формирование оценок на моменты, опережающие по времени моменты измерения, —
процессом экстраполяции, а оценка после получения измерений — процессом
интерполяции, или сглаживанием. Именно эти процессы и осуществляются в
рассмотренных ранее простейших схемах автодальномеров.
Рассмотренный подход характерен и
для решения более общей задачи — траекторной обработки радиолокационной
информации, рассмотренной в гл. 14.
7.3. Фазовый метод измерения дальности
Выполнение этого условия обычно
невозможно непосредственно на несущей частоте. Так, при  . Даже сверхдлинноволновые РНС работают на частотах
излучаемых колебаний
. Даже сверхдлинноволновые РНС работают на частотах
излучаемых колебаний , поэтому измерение фазового сдвига производится на частотах
модуляции несущей или на частотах биений двух несущих.
, поэтому измерение фазового сдвига производится на частотах
модуляции несущей или на частотах биений двух несущих.
В первом случае излучаемый сигнал
модулируется по частоте или амплитуде колебаниями с масштабной частотой  которая выделяется при детектировании принимаемых ответных
сигналов.
которая выделяется при детектировании принимаемых ответных
сигналов.
Измеряемая фазовая задержка сигнала
 включает не только фазовый сдвиг, пропорциональный
временной задержке xD, но и дополнительные фазовые сдвиги при формировании
ответного сигнала в ответчике (или при отражении объектом)
включает не только фазовый сдвиг, пропорциональный
временной задержке xD, но и дополнительные фазовые сдвиги при формировании
ответного сигнала в ответчике (или при отражении объектом)  и при прохождении приемного тракта
и при прохождении приемного тракта  . Полагая, что эти дополнительные фазовые сдвиги могут быть
учтены и скомпенсированы, можно считаться только с погрешностью измерения
временной задержки
. Полагая, что эти дополнительные фазовые сдвиги могут быть
учтены и скомпенсированы, можно считаться только с погрешностью измерения
временной задержки  , вызванной неточностью измерения фазового сдвига
, вызванной неточностью измерения фазового сдвига  фазометром:
фазометром:

 Промежуточная шкала обычно необходима для выполнения условия
согласования смежных шкал, которое заключается в том, чтобы удвоенная
максимальная погрешность измерения на грубой шкале не превышала всего
интервала измерения на соседней более точной шкале. Это позволяет исключить
возникновение грубых (аномальных) ошибок измерения при изменении фазы на
Промежуточная шкала обычно необходима для выполнения условия
согласования смежных шкал, которое заключается в том, чтобы удвоенная
максимальная погрешность измерения на грубой шкале не превышала всего
интервала измерения на соседней более точной шкале. Это позволяет исключить
возникновение грубых (аномальных) ошибок измерения при изменении фазы на 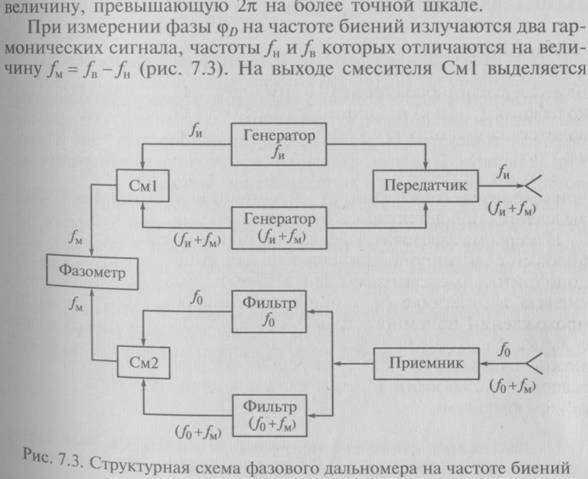 опорный сигнал на масштабной частоте
опорный сигнал на масштабной частоте  фаза которого соответствует излучаемым сигналам, а на
выходе второго смесителя См2 в приемном канале — колебания ответного сигнала на
той же частоте (если не учитывать допплеровский сдвиг при взаимном
перемещении дальномера и объекта). Измерение фазового сдвига двух сигналов
производится различными методами, в том числе и цифровым, при котором
гармонические колебания преобразуются в последовательности импульсов с
частотой повторения, равной масштабной частоте Измерение дальности при этом сводится к
измерению временной задержки одной последовательности импульсов относительно
другой, как в рассмотренном ранее импульсном методе. Таким образом,
рациональным выбором шкал измерения обеспечивается точное и однозначное
измерение дальности или разности дальностей.
фаза которого соответствует излучаемым сигналам, а на
выходе второго смесителя См2 в приемном канале — колебания ответного сигнала на
той же частоте (если не учитывать допплеровский сдвиг при взаимном
перемещении дальномера и объекта). Измерение фазового сдвига двух сигналов
производится различными методами, в том числе и цифровым, при котором
гармонические колебания преобразуются в последовательности импульсов с
частотой повторения, равной масштабной частоте Измерение дальности при этом сводится к
измерению временной задержки одной последовательности импульсов относительно
другой, как в рассмотренном ранее импульсном методе. Таким образом,
рациональным выбором шкал измерения обеспечивается точное и однозначное
измерение дальности или разности дальностей.
Однако при непрерывном сигнале
отсутствует? разрешение по дальности, а также имеются определенные трудности
устранения влияния сильных излучаемых сигналов запроса на прием слабых ответных
или отраженных.
При наличии ответчика на объекте
эта задача решается использованием разных частот в режимах запроса и ответа.
При работе по отраженным сигналам для частотной селекции принимаемых сигналов
может быть использовано допплеровское смещение частоты отраженных сигналов при
взаимном перемещении дальномера и объекта.
7.4. Частотный метод измерения
дальности
Применение частотной модуляции
излучаемого сигнала позволяет создать дальномер с непрерывным излучением,
обладающий высокой точностью и разрешающей способностью при измерении
дальности. При этом сохраняется возможность измерения скорости движения
объекта допплеровским методом.
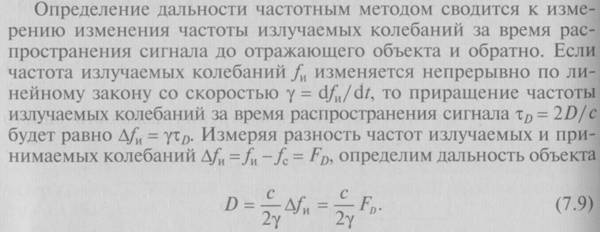 Однако непрерывное изменение частоты по
линейному закону практически не осуществимо, и приходится применять периодическую
модуляцию частоты, что вносит существенные особенности в работу системы.
Практически используются три вида частотной модуляции: симметричная линейная
(СЛЧМ), несимметричная линейная (НЛЧМ) и гармоническая (ГЧМ).
Однако непрерывное изменение частоты по
линейному закону практически не осуществимо, и приходится применять периодическую
модуляцию частоты, что вносит существенные особенности в работу системы.
Практически используются три вида частотной модуляции: симметричная линейная
(СЛЧМ), несимметричная линейная (НЛЧМ) и гармоническая (ГЧМ).
Рассмотрим работу частотного
дальномера при использовании симметричной линейной модуляции. Структурная
схема простейшего частотного дальномера включает в себя элементы, изображенные
на рис. 7.4, а. Работу дальномера при неизменном расстоянии до объекта D поясняет временная диаграмма,
представленная на рис. 7.4, б.
Верхний график диаграммы (см. рис.
7.4, б ) изображает изменение частоты излучаемых и принимаемых
(пунктир) колебаний, имеющих среднюю частоту f0, период модуляции Тм и девиацию частоты Wf. Ниже изображено изменение разностной
частоты биений FD. При выполнении условия  можно записать:
можно записать:
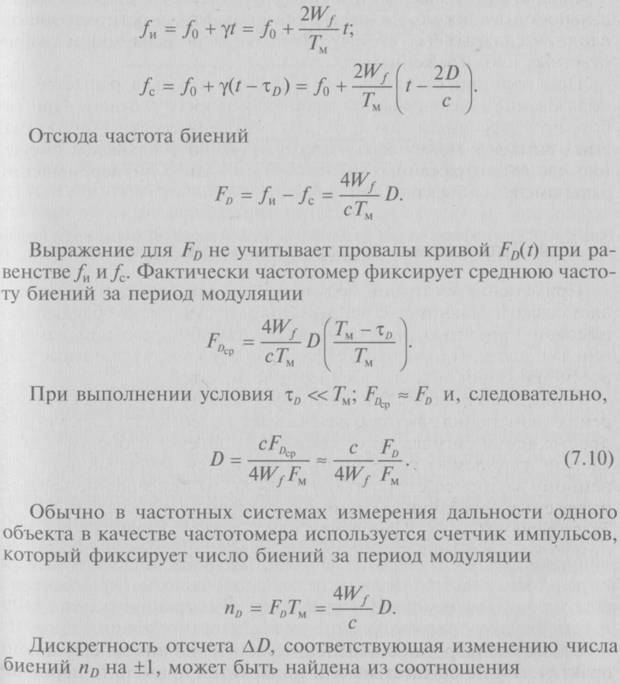
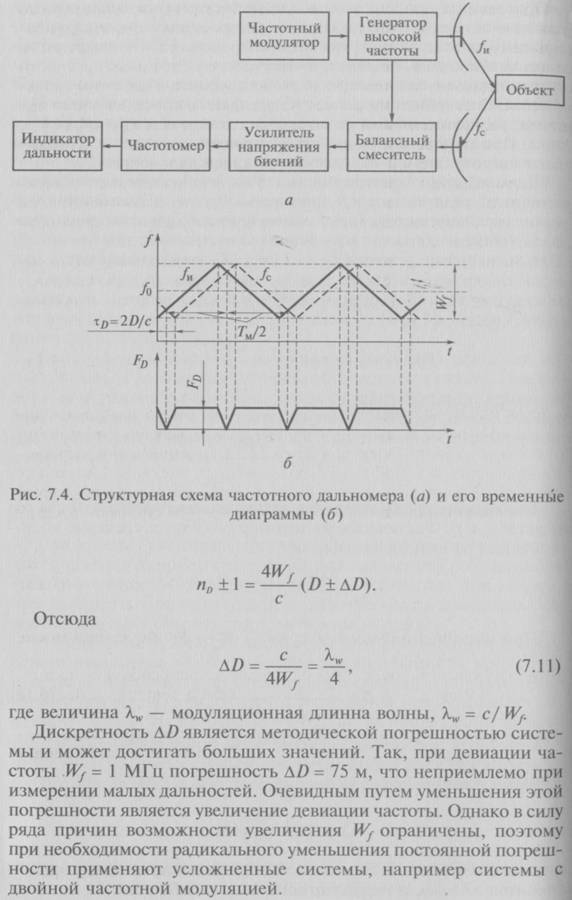
Приведенное объяснение дискретной
погрешности частотного дальномера весьма наглядно, но из него можно сделать
неправильный вывод, что причина этой погрешности в дискретности счетчика. На
самом же деле причина заключается в дискретности спектра периодического сигнала,
используемого в частотных дальномерах. Спектр биений также дискретный со
спектральными линиями, расположенными на шкале частот в точках Fk= kFM (к= 1, 2, ...). При измерении будет зафиксирована частота Fk, ближайшая к частоте биений FD, соответствующей дальности D.
Таким образом, частота биений FD может измеряться с дискретностью, равной
частоте модуляции FM, что в соответствии с формулой (7.10) определяет дискретность
измерения дальности 
Минимальная частота биений, которая
может быть зафиксирована анализатором спектра, равна частоте модуляции.
Следовательно, минимальная дальность, измеряемая частотным дальномером, также
равна

Если в зоне облучения частотного
дальномера находится несколько объектов на разных расстояниях, то каждому из
них будет соответствовать свой частотный спектр биений и для разрешения двух
объектов необходимо разделять эти спектры. Поскольку при  ширина спектра сигнала ЧМ дальномера примерно равна
девиации частоты Wf, то разрешаемое ЧМ системой расстояние
ширина спектра сигнала ЧМ дальномера примерно равна
девиации частоты Wf, то разрешаемое ЧМ системой расстояние

Его величина и характеризует
разрешающую способность системы по дальности. Таким образом, точность и
разрешающая способность частотного дальномера, а также  определяются девиацией частоты
определяются девиацией частоты  излучаемого сигнала, т.е. шириной его спектра.
излучаемого сигнала, т.е. шириной его спектра.
Движение объекта приводит к появлению
допплеровского смещения частоты принимаемого сигнала Fv, которое можно использовать для определения радиальной
скорости объекта vn если измерить раздельно дальностное FD и скоростное Fv приращения частоты.
Рассмотрим два возможных случая
работы системы.
В первом случае FD > Fv, т.е. дальностное приращение во всем
Диапазоне измеряемых дальностей и скоростей превышает скоростное (рис. 7.5,
а), и результирующая частота биений 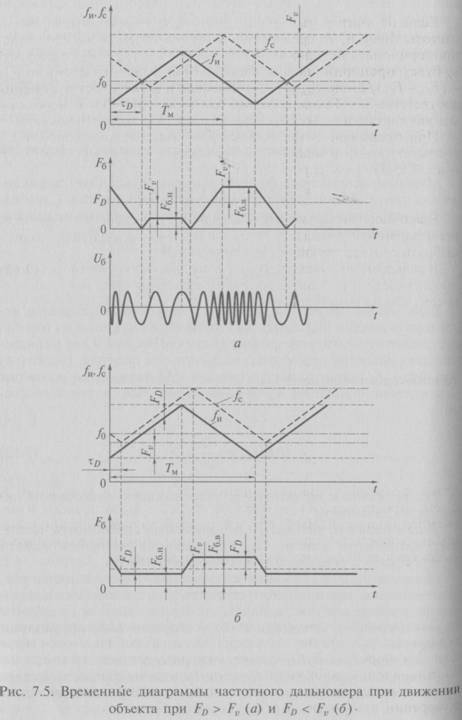
При определении результирующей
погрешности системы должны быть учтены и другие причины, влияющие на точность
измерения. Так, ЧМ обычно сопровождается паразитной амплитудной модуляцией (AM), которая приводит к
искажению огибающей биений. При этом в спектре биений появляются паразитные составляющие,
которые могут вызвать дополнительные погрешности и даже вообще нарушить работу
дальномера на предельных дальностях, когда отраженный сигнал весьма мал. Для
уменьшения паразитной AM стремятся обеспечить
равномерную частотную характеристику высокочастотного тракта в заданной полосе.
Решение этой задачи усложняется при увеличении отношения Wf/fo.
Возникает также вопрос о влиянии
нелинейности закона модуляции частоты на работу дальномера. Исследования
показывают, что при измерении дальности и скорости одного объекта основные
соотношения, полученные для линейной модуляции, справедливы при всех законах
изменения частоты, при которых кривые изменения частоты fи и fc имеют не более одного пересечения на каждый полупериод
модуляции. Однако при измерении дальности многих объектов принципиально
необходим линейный закон модуляции, выдерживаемый достаточно строго. Линейный
закон нужен и при автоматическом сопровождении одиночного объекта по дальности,
которое в частотных дальномерах сводится к удержанию частоты биений в полосе
пропускания узкополосного фильтра.
Автоматическое сопровождение
позволяет сделать систему узкополосной и тем самым снизить влияние помех по
сравнению с неперестраиваемым усилителем с полосой пропускания, охватывающей
весь диапазон частот биений. Одна из распространенных схем автоматического
сопровождения по дальности применяется при сравнительно медленном изменении
расстояния, например в частотном высотомере при выполнении условия FD> Fv. В обычную схему частотного дальномера вводится блок
управления, изменяющий FM или Wf таким образом, чтобы частота биений поддерживалась равной
частоте настройки усилителя биений Fm при изменении дальности D в заданном диапазоне

При этом напряжение,
пропорциональное дальности D(t), снимается с блока управления. В одном из
них осуществляется автоподстройка гетеродина, что имеет преимущества,
поскольку система автосопровождения охватывает в этом случае лишь приемную
часть системы.
При использовании так называемого
следящего гетеродина, частота которого изменяется таким образом, что разность 
 остается постоянной
(рис. 7.6), усиление сигнала в приемнике ЧМ дальномера переносится на
промежуточную частоту
остается постоянной
(рис. 7.6), усиление сигнала в приемнике ЧМ дальномера переносится на
промежуточную частоту  Это позволяет избавиться от воздействия низкочастотных
помех, вызванных, например, вибрациями, которые испытывает аппаратура при
размещении на движущемся объекте. Для измерения дальности и скорости одиночного
объекта в этом случае можно использовать частотный дискриминатор, настроенный
на Постоянная составляющая на выходе дискриминатора будет
пропорциональна Fv, а составляющая на частоте модуляции пропорциональна FD. Таким образом, с помощью фильтра нижних
частот и фильтра, настроенного на частоту FM, можно выделить напряжения, пропорциональные vr и D объекта. При этом устраняется дискретность отсчета дальности
и появляется возможность измерения малых дальностей, чему мешало воздействие
низкочастотных помех при непосредственном усилении на низкой частоте в
простейшей схеме частотного дальномера.
Это позволяет избавиться от воздействия низкочастотных
помех, вызванных, например, вибрациями, которые испытывает аппаратура при
размещении на движущемся объекте. Для измерения дальности и скорости одиночного
объекта в этом случае можно использовать частотный дискриминатор, настроенный
на Постоянная составляющая на выходе дискриминатора будет
пропорциональна Fv, а составляющая на частоте модуляции пропорциональна FD. Таким образом, с помощью фильтра нижних
частот и фильтра, настроенного на частоту FM, можно выделить напряжения, пропорциональные vr и D объекта. При этом устраняется дискретность отсчета дальности
и появляется возможность измерения малых дальностей, чему мешало воздействие
низкочастотных помех при непосредственном усилении на низкой частоте в
простейшей схеме частотного дальномера.
Измерение дальности многих объектов. При наличии в зоне облучения антенны
РЛС нескольких объектов, имеющих различные дальности и скорости, на вход
приемника поступает целый спектр частот, составляющие которого будут
определяться величинами дальностей и скоростей объектов. Для обнаружения
объектов и измерения их дальностей и скоростей необходимо произвести анализ
спектра частот принимаемого сигнала. Для анализа используются анализаторы
спектра как параллельного, так и последовательного типа.
Анализатор с параллельным
(одновременным) анализом имеет набор фильтров, частоты настройки которых
установлены с шагом порядка полосы пропускания фильтра  , выбираемой в
соответствии с заданной точностью и разрешающей способностью по дальности, а
число фильтров п определяется диапазоном анализируемых частот биений
, выбираемой в
соответствии с заданной точностью и разрешающей способностью по дальности, а
число фильтров п определяется диапазоном анализируемых частот биений
В случае неподвижных или медленно
движущихся объектов допплеровским приращением частоты Fv можно пренебречь и считать,
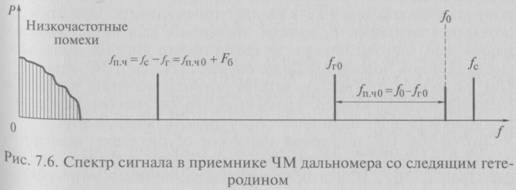 что спектр содержит только дальностные составляющие. Тогда
диапазон анализируемых частот
что спектр содержит только дальностные составляющие. Тогда
диапазон анализируемых частот  определяется зоной обзора по дальности и
необходимое число фильтров
определяется зоной обзора по дальности и
необходимое число фильтров

где  — заданное значение разрешаемого расстояния.
— заданное значение разрешаемого расстояния.
Имея в виду, что линии спектра
биений расположены на оси частот в точках, кратных частоте модуляции FM, желательно центральные частоты настройки
фильтров совместить с линиями спектра. В этом случае при полосе фильтра  заданный диапазон анализа Fa будет перекрыт при
числе фильтров
заданный диапазон анализа Fa будет перекрыт при
числе фильтров  . Таким образом, при
значительной зоне обзора по дальности и высокой разрешающей способности
дальномера требуется большое число фильтров. Поэтому несмотря на достоинство
параллельного анализатора, заключающееся в быстроте анализа (время анализа
. Таким образом, при
значительной зоне обзора по дальности и высокой разрешающей способности
дальномера требуется большое число фильтров. Поэтому несмотря на достоинство
параллельного анализатора, заключающееся в быстроте анализа (время анализа  в обзорных системах с ЧМ широко применяются последовательные
анализаторы с перестраиваемыми и не перестраиваемыми фильтрами. В частотных
дальномерах чаще находят применение последние. В этом случае фильтр настроен на
фиксированную частоту Fф, а заданный диапазон частот биений Fa последовательно
просматривается (например, на экране ЭЛТ) за счет изменения частоты гетеродина,
частоты модуляции или девиации частоты. Последние два случая основаны на
использовании условия
в обзорных системах с ЧМ широко применяются последовательные
анализаторы с перестраиваемыми и не перестраиваемыми фильтрами. В частотных
дальномерах чаще находят применение последние. В этом случае фильтр настроен на
фиксированную частоту Fф, а заданный диапазон частот биений Fa последовательно
просматривается (например, на экране ЭЛТ) за счет изменения частоты гетеродина,
частоты модуляции или девиации частоты. Последние два случая основаны на
использовании условия

С помощью схемы управления девиация
частоты Wf или частота модуляции FM периодически изменяются в пределах,
обеспечивающих последовательный анализ всего заданного диапазона дальностей.
При цифровой реализации в
анализаторе спектра используется дискретное преобразование Фурье. Анализируемые
сигналы в виде двух квадратурных составляющих подвергаются
аналого-цифровому преобразованию в
двух квадратурных каналах. При этом частота дискретизации FД должна превышать удвоенное значение
наивысшей частоты спектра анализируемого сигнала, определяемой шириной полосы  Далее осуществляется ДПФ, при котором на выходе процессора
можно оценить значения частотных составляющих спектра сигнала и выделить
составляющие, превышающие установленный пороговый уровень обнаружения.
Далее осуществляется ДПФ, при котором на выходе процессора
можно оценить значения частотных составляющих спектра сигнала и выделить
составляющие, превышающие установленный пороговый уровень обнаружения.
Таким образом, цифровой процессор
осуществляет операцию, соответствующую параллельному анализатору спектра с
числом фильтров  . При этом полоса
пропускания каждого из фильтров
. При этом полоса
пропускания каждого из фильтров  число выборок за
число выборок за
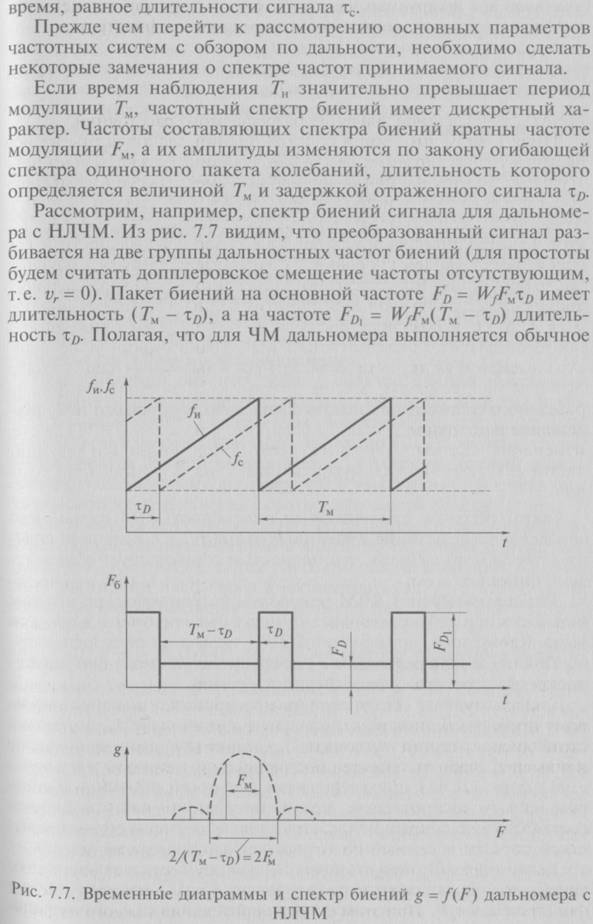
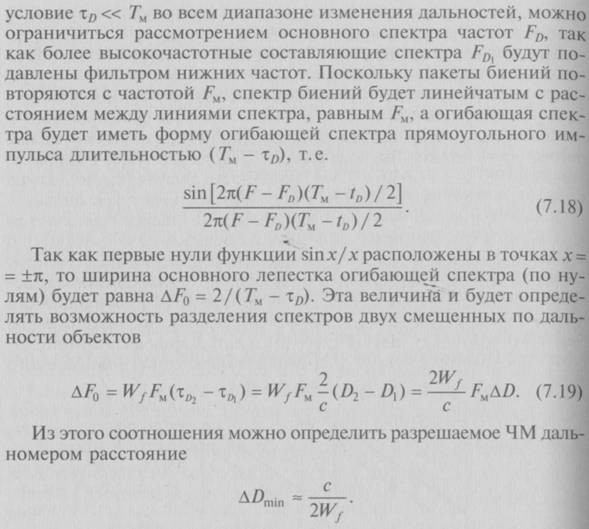
Таким образом, разрешающая
способность ЧМ дальномера определяется величиной девиации частоты Wf, т.е. шириной спектра излучаемого
сигнала, что полностью соответствует общей теории сигналов.
Для дальномера с СЛЧМ результаты
сохраняются, но отсчеты дальности при той же величине Тм могут быть получены в два раза чаще.
Кроме того, применение СЛЧМ позволяет разделить даль- ностное FD и допплеровское Fv приращения частоты при движущихся объектах, что уже
обсуждалось ранее.
Следует заметить, что от величины  зависит положение максимума огибающей спектра относительно
линий спектра, что может сказаться на точности измерения FD. Однако при выполнении условия
зависит положение максимума огибающей спектра относительно
линий спектра, что может сказаться на точности измерения FD. Однако при выполнении условия  влияние смещения невелико и его можно не учитывать.
влияние смещения невелико и его можно не учитывать.
В случае СЛЧМ при увеличении
дальности объектов D зоны провалов FD расширяются, а зоны постоянной частоты
биений соответственно сокращаются, что приводит к расширению огибающей спектра
и снижению точности и разрешающей способности дальномера. Отсюда становится
очевидной непригодность нелинейной модуляции частоты (например, ГЧМ) в
системах с обзором по дальности, так как при этом частота биений FD изменяется при неизменной дальности
объектов, что исключает возможность однозначного измерения их дальности и
разрешения по дальности.
Большое число фильтров, необходимое
для параллельного анализа при большом числе элементов разрешения,
препятствовало его широкому применению при аналоговой реализации. В настоящее
время, как отмечалось ранее, решение этой задачи осуществляется цифровыми
методами на основе БПФ, выполняемого процессором после аналого-цифрового
преобразователя спектра биений с помощью АЦП. При этом процессор должен иметь
достаточное быстродействие и память для обработки принимаемого сигнала в
реальном масштабе времени.
При движении объектов линии спектра
биений смещаются пропорционально радиальной скорости объектов. Как уже отмечалось,
дальностное и скоростное смещения частоты могут быть разделены и измерены при
использовании СЛЧМ. В этом случае линии спектра биений раздваиваются, причем
частотный интервал между смещенными линиями равен удвоенному значению
допплеровской частоты сигнала соответствующего объекта.
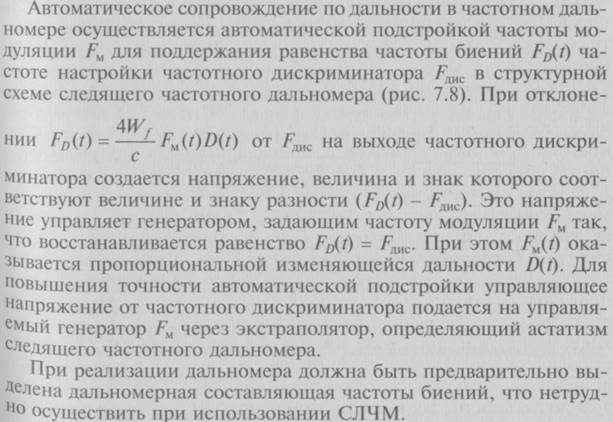
Сравнивая достоинства и недостатки
частотного и импульсного методов измерения дальности, следует отметить более
сложное решение задачи радиолокационного наблюдения многих объектов частотным
методом, в частности трудность обеспечения необходимой для этого высокой
линейности модуляции, эффективной развязки приемного и передающего трактов
частотной РЛС.
В то же время частотный метод
позволяет при малой пиковой мощности излучаемого сигнала получить высокую
точность и разрешающую способность по дальности, дает возможность измерения
весьма малых дальностей. Преимущества частотного метода особенно ощутимы при
измерении дальности и скорости единственного объекта на небольших расстояниях,
что и определило широкое применение частотных дальномеров для измерения высоты
летательных или космических аппаратов над поверхностью Земли или другой
планеты. В радиовысотомерах (РВ) закон модуляции частоты может отличаться от
линейного, что упрощает создание аппаратуры. Однако при использовании
частотного дальномера для измерения высоты должны учитываться некоторые особенности
отраженных сигналов, которые рассматриваются далее.
Особенности применения частотного метода
в радиовысотомерах. Измерение высоты и
вертикальной скорости объектов необходимо для решения следующих задач:
·
пилотирование ЛА
(самолетов и вертолетов);
·
дистанционная съемка
рельефа поверхности Земли и планет или их спутников;
·
посадка космических
аппаратов на поверхность планет;
·
определение текущей
высоты орбиты ИСЗ.
Основными тактическими
характеристиками радиовысотомеров являются пределы и точность измерения высоты
и вертикальной скорости. Требования к параметрам измерителя определяются его
назначением. Одним из основных требований к РВ является 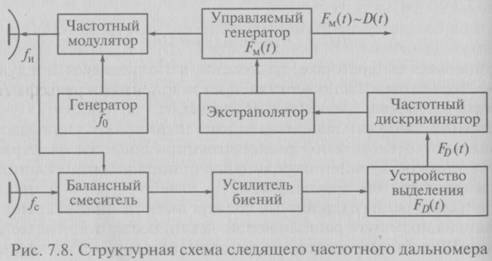
сохранение заданной точности
измерения при различных эволюциях ЛA. Возникающие при этом погрешности
измерения высоты и вертикальной скорости можно устранить гиростабилизацией
антенной системы РВ. Однако этот дорогостоящий способ используется редко.
Обычно для уменьшения возникающих из-за кренов ЛA погрешностей применяются широкие ДНА, что приводит к
расширению частотного спектра сигналов, отраженных от подстилающей поверхности,
и усложнению их обработки. Построение и характеристики РВ определяются видом
излучаемых (зондирующих) сигналов.
Непрерывное излучение с ЧМ
используется в РВ малых и средних высот. Импульсное излучение с малой
(квазинепрерывное) и большой скважностью применяется в основном в РВ больших и
космических высот, хотя с освоением наносекундной техники импульсное излучение
начинает применяться и при измерении малых высот.
Далее кратко рассмотрены
особенности построения РВ с ЧМ.
Специфика отражения радиосигналов в
диапазоне СВЧ от протяженной поверхности со случайным рельефом заключается в
том, что радиосигнал на входе приемника является результатом сложения большого
числа элементарных сигналов, созданных при 
Рассмотрим пути повышения точности
измерения высоты. Прежде всего необходимо при фильтрации использовать априорные
сведения об изменении рельефа, изменениях ориентации оси ДНА и флуктуациях
траектории. Это позволяет оптимизировать Фильтр и снизить апостериорные
дисперсии погрешностей. Наиболее радикальный путь решения этой задачи
состоит в комплексировании РВ с барометрическим высотомером и измерителем вертикальной
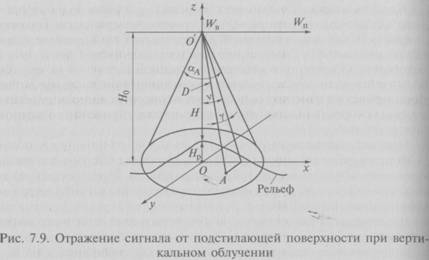 составляющей ускорения (акселерометром
вертикального канала). Высокая точность фильтрации параметров рельефа
подстилающей поверхности обеспечивается компенсацией траек- торных флуктуаций
высоты полета с помощью данных барометрического высотомера и акселерометра.
При этом становится возможным с помощью комплексированного РВ решить задачу
получения информации о профиле рельефа местности.
составляющей ускорения (акселерометром
вертикального канала). Высокая точность фильтрации параметров рельефа
подстилающей поверхности обеспечивается компенсацией траек- торных флуктуаций
высоты полета с помощью данных барометрического высотомера и акселерометра.
При этом становится возможным с помощью комплексированного РВ решить задачу
получения информации о профиле рельефа местности.
Как уже отмечалось, частотный
измеритель дальности позволяет одновременно определять и радиальную скорость
объекта. Однако необходимость расширения спектра для повышения точности и
разрешающей способности при измерении дальности ведет к ухудшению этих
параметров при измерении скорости. Поэтому при необходимости точного измерения
скорости создают специальные измерители скорости на основе допплеровского эффекта,
построение и выбор параметров которых обсуждается далее применительно к
допплеровским измерителям путевой скорости и угла сноса ЛА.
7.5. Допплеровский метод измерения
путевой скорости и угла сноса
В настоящее время широкое
применение для управления ЛА получили автономные средства навигации. К их числу
относятся и допплеровские измерители вектора скорости объекта. Наиболее распространенными
являются допплеровские измерители путевой скорости и угла сноса самолета
(ДИСС).
Путевой скоростью самолета
называется горизонтальная проекция скорости ЛA относительно земной поверхности. Путевая скорость W связана с воздушной
скоростью V и скоростью ветра U так называемым навигационным треугольником (рис. 7.10), в
котором угол ф между векторами воздушной и путевой скоростей называется углом
сноса, поскольку его причиной является ветер. Допплеровский измеритель
позволяет непосредственно определить путевую скорость по спектру частот
сигнала, отраженного земной поверхностью.
При горизонтальном полете ЛА
применяется наклонное облучение земной поверхности (рис. 7.11, а), чтобы
обеспечить достаточно большую проекцию вектора скорости W на направление облучения и в то же время сохранить
достаточно сильное отражение в направлении ДИСС.
Для определения спектра частот
отраженного сигнала вырежем из облучаемой площади элементарную полоску, все
точки которой расположены на направлениях, составляющих угол (3, с вектором
скорости W. При наклонном
облучении границы этих полосок имеют форму гипербол. Все точки такой
элементарной полоски создадут отраженный сигнал с частотой
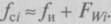 . Имея в виду, что
каждой из N элементарных полосок соответствует допплеровский сдвиг частоты
. Имея в виду, что
каждой из N элементарных полосок соответствует допплеровский сдвиг частоты  можно для всей облучаемой площади представить спектр
отраженного сигнала последовательностью частот
можно для всей облучаемой площади представить спектр
отраженного сигнала последовательностью частот
 Если отражающие свойства поверхности в пределах облучаемой
площади одинаковы, то форма огибающей спектра будет определяться формой ДНА
измерителя в вертикальной плоскости. Максимальную
Если отражающие свойства поверхности в пределах облучаемой
площади одинаковы, то форма огибающей спектра будет определяться формой ДНА
измерителя в вертикальной плоскости. Максимальную 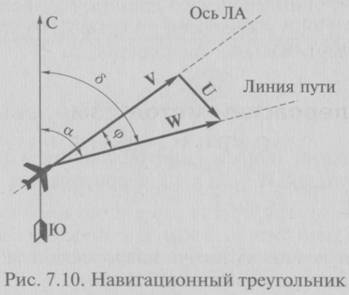
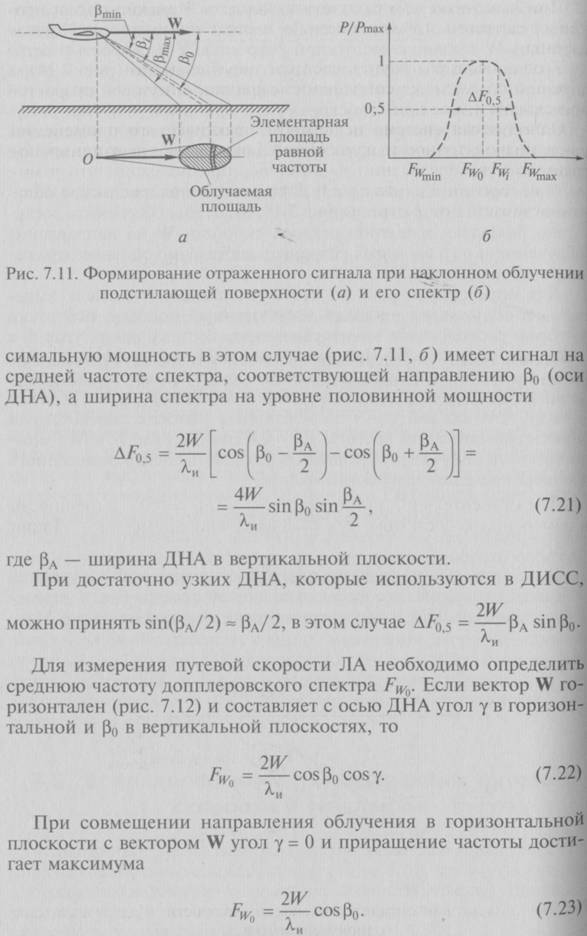
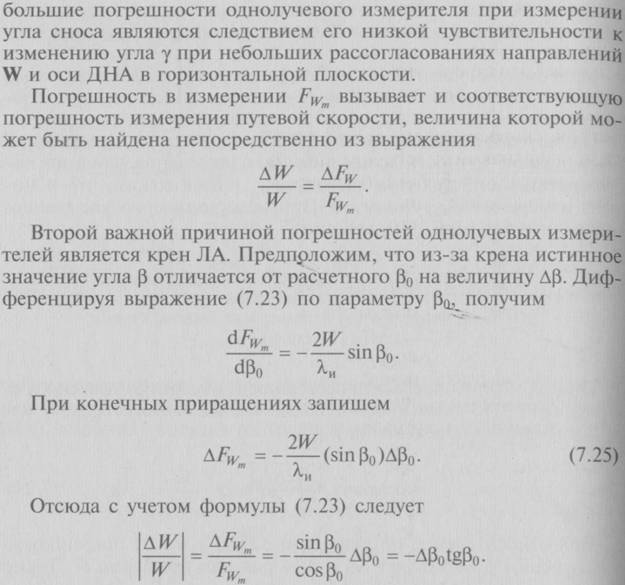 В реальных системах угол облучения
В реальных системах угол облучения  выбирается порядка 70°. В этом случае относительная
погрешность определения путевой скорости составляет 0,05 на каждый градус
погрешности
выбирается порядка 70°. В этом случае относительная
погрешность определения путевой скорости составляет 0,05 на каждый градус
погрешности  определения угла облучения
определения угла облучения
Уменьшения погрешности, вызываемой
креном, можно достигнуть стабилизацией антенны в горизонтальной плоскости или
введением поправок на крен в вычислительном устройстве при обработке данных.
Однако это приводит к существенному усложнению измерителя, но не устраняет
недостатков однолучевого метода, к которым следует отнести также высокие
требования к стабильности частоты излучаемых колебаний.
Наиболее радикальным путем
повышения точности измерения путевой скорости и угла сноса является применение
многолучевых измерителей, излучающих в двух, трех или четырех направлениях.
Измерение путевой скорости и угла сноса
многолучевыми системами. Измерители вектора
скорости ЛА принято подразделять на самолетные и вертолетные. В самолетных ДИСС
измеряются продольная и поперечная составляющие вектора скорости, т.е. путевая
скорость и угол сноса, в то время как вертолетные ДИСС позволяют измерять и
вертикальную составляющую скорости. Кроме того, в вертолетных измерителях
заранее неизвестен знак путевой скорости, а ее величина может быть и равной
нулю в режиме зависания.
Отличаются также максимальные
значения измеряемых скоростей и высот полета (для вертолетов максимальные
скорости и высоты в несколько раз меньше). Однако объем выходных данных
вертолетных измерителей может быть существенно больше из-за необходимости
измерения полного вектора скорости. Заметим, что вертолетные измерители
применяются также для обеспечения мягкой посадки космических аппаратов на Луну
и планеты, а самолетные ДИСС — для управления крылатыми ракетами и
экранопланами.
В состав измерителя вектора
скорости (упрощенная структурная схема четырехлучевого ДИСС представлена на
рис. 7.13) входят: антенное устройство, формирующее четыре луча, приемопередатчик,
устройство обработки принимаемых сигналов, вычислитель составляющих скорости и
устройство отображения. Обычно данные ДИСС непосредственно вводятся в систему
автоматического управления (САУ) ЛА.
Рассмотрим принцип действия
многолучевых ДИСС для горизонтального полета самолета, при котором вектор W всегда направлен вперед, а вертикальная составляющая
скорости отсутствует. Рассмотрим сначала двухлучевые системы. На рис. 7.14
представлено расположение лучей односторонней двухлучевой системы. 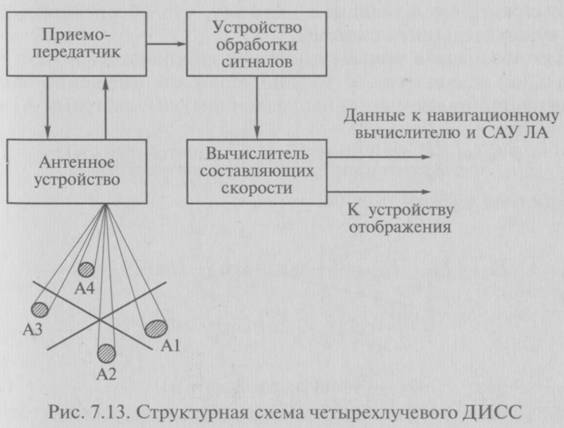
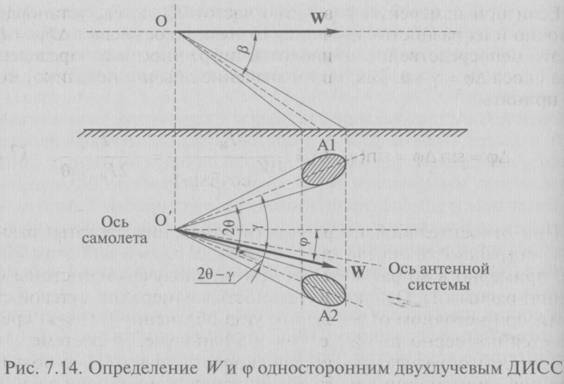 При измерении путевой скорости и угла сноса антенная система
поворачивается до совмещения спектров сигналов на выходе каналов приемника,
соответствующих двум лучам антенны. При этом ось симметрии лучей (ось антенной
системы) будет совмещена с вектором W, а угол между осью антенной системы и осью самолета равен
углу сноса ф. Непосредственно из рис. 7.14 видно, что точность двухлучевой
системы будет выше, чем однолучевой, так как при повороте антенны лучи
пересекают линии равных частот под углом, близким к прямому, что обеспечивает
большую чувствительность системы.
При измерении путевой скорости и угла сноса антенная система
поворачивается до совмещения спектров сигналов на выходе каналов приемника,
соответствующих двум лучам антенны. При этом ось симметрии лучей (ось антенной
системы) будет совмещена с вектором W, а угол между осью антенной системы и осью самолета равен
углу сноса ф. Непосредственно из рис. 7.14 видно, что точность двухлучевой
системы будет выше, чем однолучевой, так как при повороте антенны лучи
пересекают линии равных частот под углом, близким к прямому, что обеспечивает
большую чувствительность системы.
Если обозначить угол между осями
диаграмм А1 и А2в горизонтальной плоскости  , то допплеровское смещение частоты сигналов, принимаемых по
направлениям осей диаграмм А1 и А2:
, то допплеровское смещение частоты сигналов, принимаемых по
направлениям осей диаграмм А1 и А2:
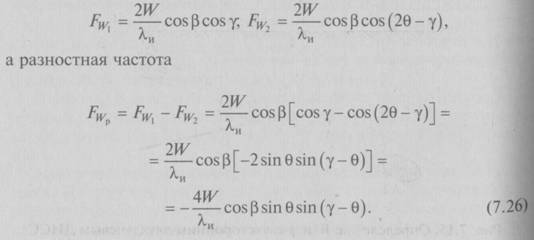
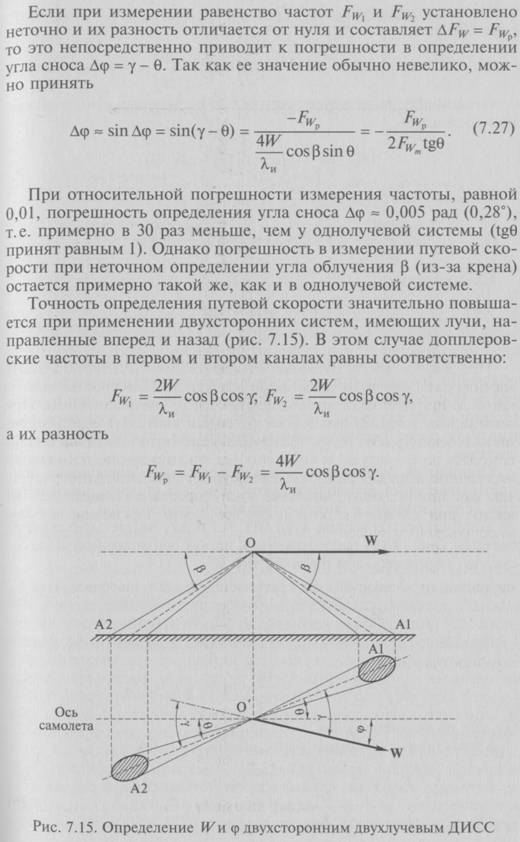
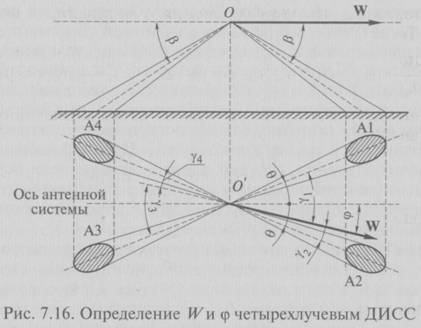 При совмещении оси
антенной системы с вектором W углы между осями ДНА и вектором путевой скорости совпадают
(у, = у2) и разностные частоты становятся равными, т.е.
При совмещении оси
антенной системы с вектором W углы между осями ДНА и вектором путевой скорости совпадают
(у, = у2) и разностные частоты становятся равными, т.е. 
Таким образом, добившись поворотом
антенной системы равенства разностных частот, можно определить угол сноса  непосредственно по положению оси антенной системы
относительно оси самолета, а путевую скорость W — по измеренной величине разностной
частоты.
непосредственно по положению оси антенной системы
относительно оси самолета, а путевую скорость W — по измеренной величине разностной
частоты.
При неподвижной относительно оси
самолета антенной системе величины W и находятся с помощью вычислительного устройства решением
уравнений (7.30) и (7.31), имея в виду, что в соответствии с рис. 7.16:
 Четырехлучевая система сочетает преимущества односторонней и
двухсторонней двухлучевых систем, заключающиеся в уменьшении погрешностей
из-за продольного и поперечного кренов, поскольку их влияние практически
компенсируется при вычитании допплеровских смещений противоположно
направленных лучей. Сохраняется и высокая чувствительность к изменению
допплеровского смещения при отклонении оси самолета в горизонтальной
плоскости, что позволяет определить угол сноса (или поперечную составляющую скорости vп) с высокой точностью. Большим достоинством системы является
также снижение требований к кратковременной стабильности частоты, поскольку
взаимодействующие сигналы каналов приходят примерно с Равных расстояний
Четырехлучевая система сочетает преимущества односторонней и
двухсторонней двухлучевых систем, заключающиеся в уменьшении погрешностей
из-за продольного и поперечного кренов, поскольку их влияние практически
компенсируется при вычитании допплеровских смещений противоположно
направленных лучей. Сохраняется и высокая чувствительность к изменению
допплеровского смещения при отклонении оси самолета в горизонтальной
плоскости, что позволяет определить угол сноса (или поперечную составляющую скорости vп) с высокой точностью. Большим достоинством системы является
также снижение требований к кратковременной стабильности частоты, поскольку
взаимодействующие сигналы каналов приходят примерно с Равных расстояний  и их временной сдвиг
и их временной сдвиг  определяющий требования к стабильности
частоты fи, весьма мал. Практически такие же результаты могут быть
получены и при использовании в системе трех лучей.
определяющий требования к стабильности
частоты fи, весьма мал. Практически такие же результаты могут быть
получены и при использовании в системе трех лучей.
При анализе точности различных
методов измерения W и допплеровское смещение предполагалось представленным единственной
частотой, тогда как фактически принимаемый сигнал содержит целый спектр
допплеровских частот, что было показано ранее. Это вносит дополнительные
погрешности, а также некоторые особенности в работу и построение ДИСС. В
частности, при наклонном облучении гладкой водной поверхности зеркальное
отражение приводит к резкому снижению интенсивности сигнала, отраженного в
сторону антенны ДИСС, что может привести к нарушению его работы («морской
эффект»).
Построение допплеровских измерителей
вектора скорости. Построение
допплеровских измерителей в значительной степени определяется выбранным
режимом излучения. Применяются системы непрерывного излучения без модуляции и
с частотной модуляцией, а также системы с импульсным излучением с малой скважностью
(квазинепрерывные) и большой скважностью.
Основным достоинством системы
непрерывного излучения без модуляции является сосредоточенность спектра
отраженного сигнала в пределах одной полосы частот, что обеспечивает наиболее
полное использование энергии сигнала, а также сравнительно простое устройство
передатчика, приемника и индикатора.
На рис. 7.17 представлена
структурная схема простейшего трехлучевого самолетного ДИСС с непрерывным
излучением, неподвижной антенной системой и непосредственным преобразованием
отраженных сигналов на низкую частоту.
Генератор высокой частоты (ГВЧ)
клистронного или полупроводникового типа генерирует колебания с частотой fи
необходимой мощности, поступающие через делитель мощности на три
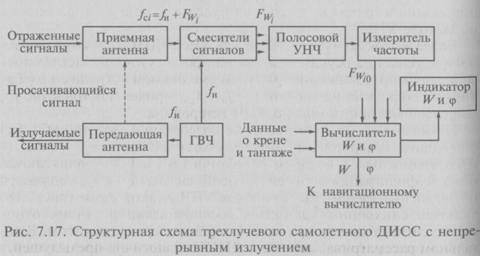 излучателя передающей антенны, которая формирует три луча,
направленных под заданными углами ((3 и 6) вниз и в стороны относительно оси
антенной системы, совпадающей с осью самолета.
излучателя передающей антенны, которая формирует три луча,
направленных под заданными углами ((3 и 6) вниз и в стороны относительно оси
антенной системы, совпадающей с осью самолета.
Отраженные сигналы с частотами  принятые по каждому из трех лучей приемной антенны, поступают
на три идентичных приемных измерительных канала. На вход каждого канала
проникают также колебания от ГВЧ на частоте, которые играют роль опорных в
балансных смесителях на входе каждого канала. На выходах балансных смесителей
выделяются низкочастотные колебания допплеровского спектра, которые после
усиления в усилителе низких частот (УНЧ) в каждом канале поступают на
измеритель частоты. Ширина полосы УНЧ выбирается исходя из возможного диапазона
допплеровских частот. При таком преобразовании частоты теряется знак
допплеровского смещения, что несущественно для самолетных ДИСС.
принятые по каждому из трех лучей приемной антенны, поступают
на три идентичных приемных измерительных канала. На вход каждого канала
проникают также колебания от ГВЧ на частоте, которые играют роль опорных в
балансных смесителях на входе каждого канала. На выходах балансных смесителей
выделяются низкочастотные колебания допплеровского спектра, которые после
усиления в усилителе низких частот (УНЧ) в каждом канале поступают на
измеритель частоты. Ширина полосы УНЧ выбирается исходя из возможного диапазона
допплеровских частот. При таком преобразовании частоты теряется знак
допплеровского смещения, что несущественно для самолетных ДИСС.
Измеритель частоты в каждом канале
измеряет среднюю частоту  допплеровского спектра, а вычислительное
устройство на основе уравнений, рассмотренных в подразд. 7.4, вычисляет
путевую скорость W и угол сноса , которые затем регистрируются
индикатором и используются для определения координат самолета методом
счисления пути (интегрированием скорости).
допплеровского спектра, а вычислительное
устройство на основе уравнений, рассмотренных в подразд. 7.4, вычисляет
путевую скорость W и угол сноса , которые затем регистрируются
индикатором и используются для определения координат самолета методом
счисления пути (интегрированием скорости).
Для измерения средней допплеровской
частоты можно использовать счетчик числа пересечений нулевого уровня напряжением
низкой частоты (НЧ) (счетчик числа «нулей»), автокоррелятор, измеряющий время
корреляции, обратно пропорциональное средней частоте, или частотный
дискриминатор. Все три метода имеют близкие погрешности, однако практически
легче осуществить счетчик «нулей», а точнее, счетчик числа импульсов,
сформированных схемой ограничения и дифференцирования в точках пересечения
нулевого уровня напряжением на выходе УНЧ.
Более высокую чувствительность
имеет ДИСС, в котором основное усиление осуществляется на промежуточной
частоте после первого преобразования частоты смешением сигнала с колебаниями
гетеродина на частоте  , причем постоянство
, причем постоянство  поддерживается с помощью АПЧ гетеродина.
поддерживается с помощью АПЧ гетеродина.
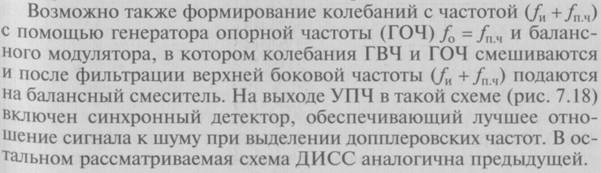
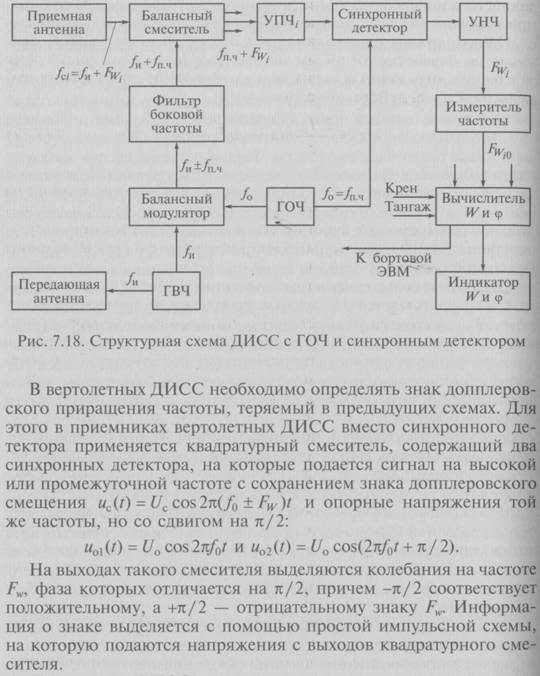
Недостатком ДИСС с непрерывным
излучением является трудность устранения просачивающегося на вход приемника
сигнала передатчика. Этот сигнал обычно модулирован по амплитуде и фазе шумовым
напряжением. Просочившийся сигнал может во много раз превышать не только
собственные шумы приемника, но и принимаемые сигналы, что ведет к снижению
чувствительности приемника.
Для уменьшения влияния
просочившихся сигналов в ДИСС используется частотная или импульсная модуляция
излучаемых колебаний. Проще всего осуществить развязку приемного и передающего
каналов применением импульсного режима излучения, при котором на время
излучения импульса  приемник запирается. Однако при этом появляются «слепые»
высоты, т.е. ДИСС оказывается неработоспособным на высотах
приемник запирается. Однако при этом появляются «слепые»
высоты, т.е. ДИСС оказывается неработоспособным на высотах  , на которых время задержки х3 отраженных сигналов кратно периоду
повторения импульсов Тп, т.е. действует условие
, на которых время задержки х3 отраженных сигналов кратно периоду
повторения импульсов Тп, т.е. действует условие
 Обычно выбирают
Обычно выбирают  и условие (7.32) действует лишь на малых
высотах, где отраженный сигнал очень сильный и обеспечивает приемлемое
отношение сигнал/помеха, что и используется в непрерывно-импульсных ДИСС при
работе на малых высотах без блокирования приемника.
и условие (7.32) действует лишь на малых
высотах, где отраженный сигнал очень сильный и обеспечивает приемлемое
отношение сигнал/помеха, что и используется в непрерывно-импульсных ДИСС при
работе на малых высотах без блокирования приемника.
Однако наибольшее практическое
применение находят импульсные ДИСС, работающие в автокогерентным режиме, при
котором поочередно взаимодействуют допплеровские спектры противоположно
направленных лучей: первого и третьего, второго и четвертого. Передающее
устройство таких ДИСС (рис. 7.19) генерирует высокочастотные импульсы
длительностью  с частотой повторения Fп и несущей fи.
с частотой повторения Fп и несущей fи.
Высокочастотный коммутатор с
частотой коммутации FK (несколько герц) поочередно подключает к передатчику
соответствующие пары антенн. На время излучения приемник запирается переключателем
прием-передача, управляемым импульсами от модулятора.
Отраженные сигналы соответствующих
пар лучей через коммутатор лучей и переключатель прием-передача поступают на
смеситель сигнала и после преобразования усиливаются на промежуточной частоте
и детектируются. На выходе детектора поочередно выделяется спектр разностных
частот  или
или  в соответствии с формулами (7.30) и
(7.31).
в соответствии с формулами (7.30) и
(7.31).
Этот спектр и используется далее
для определения путевой скорости W и угла сноса ср.
Такой метод выделения допплеровской
информации в виде разностной частоты двух одновременно приходящих отраженных
сигналов не требует опорного сигнала, поэтому и получил название
автокогерентного приема, или приема с внешней когерентностью. Сигнал,
пропорциональный разности частот  используется для управления поворотом
антенны в горизонтальной плоскости. При
используется для управления поворотом
антенны в горизонтальной плоскости. При  продольная ось антенны совмещается с вектором W, а угол между осью антенной системы и осью
самолета будет равен
продольная ось антенны совмещается с вектором W, а угол между осью антенной системы и осью
самолета будет равен  . Этот угол с помощью датчика передается непосредственно на
индикатор
. Этот угол с помощью датчика передается непосредственно на
индикатор  и W (или через интерфейс в вычислительное
устройство).
и W (или через интерфейс в вычислительное
устройство).
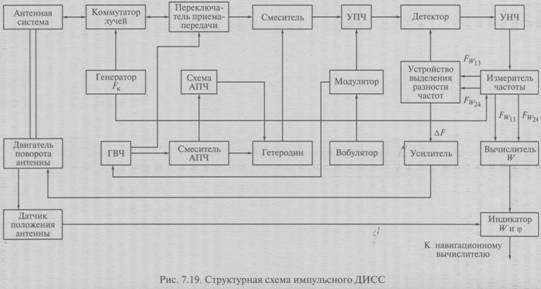
К сожалению, крен самолета ведет к
неодновременности прихода сигналов пар лучей, что нарушает работу ДИСС.
Поэтому в автокогерентных ДИСС применяют стабилизацию антенны в горизонтальной
плоскости. Однако при этом не устраняются нарушения работы ДИСС в условиях
сильно пересеченной местности, когда задержки сигналов противоположных лучей
настолько отличаются, что отраженные сигналы не перекрываются и разностные
биения не образуются. Правда, такие условия создаются на практике сравнительно
редко.
Следует отметить, что в ДИСС с
автокогерентным приемом могут использоваться генераторы с невысокой
стабильностью частоты, поскольку при приеме взаимодействуют одновременно
приходящие отраженные сигналы, на которых частотные и фазовые нестабильности
передатчика сказываются в равной степени и при вычитании спектров
компенсируются.
Широкое применение находят ДИСС с
ЧМ, поскольку частотная модуляция, сохраняя преимущества режима непрерывного
излучения, позволяет радикально снизить влияние шумовой составляющей
просачивающегося на вход приемника излучаемого сигнала, так как благодаря ЧМ
спектр отраженного сигнала сдвигается пропорционально его задержке. При этом,
так же как и в импульсных ДИСС, возможно использование одной антенны для
передачи и приема с разделением каналов с помощью невзаимных ферритовых
устройств.
В ДИСС с ЧМ чаще всего используется
гармонический закон модуляции частоты, при котором выбором соответствующей гармоники
частоты модуляции принимаемого сигнала можно обеспечить необходимое подавление
просочившегося сигнала передатчика. Выделение требуемой гармоники  обеспечивается настройкой фильтров УПЧ на частоту
обеспечивается настройкой фильтров УПЧ на частоту  . В остальном схема
ДИСС с ЧМ принципиально не отличается от схемы ДИСС без модуляции несущей.
. В остальном схема
ДИСС с ЧМ принципиально не отличается от схемы ДИСС без модуляции несущей.
Применение ЧМ позволяет с помощью
ДИСС определять не только составляющие скорости, но и измерять также наклонные
дальности до подстилающей поверхности по каждому из трех лучей антенны, на
основании которых можно вычислить высоту полета ЛА, а также углы крена и
тангажа.
Для определения расстояний в таких
ДИСС обычно измеряется фазовый сдвиг принимаемого сигнала, пропорциональный временной
задержке сигнала, непосредственно связанной с расстоянием. На рис. 7.20
представлена упрощенная структурная схема такого комбинированного измерителя.
Излучение и прием осуществляются в измерителе отдельными трехлучевыми
антеннами, причем обработка отраженных сигналов производится одновременно в
трех одинаковых каналах приемника. Генератор высокой частоты модулируется по
частоте по гармоническому закону с
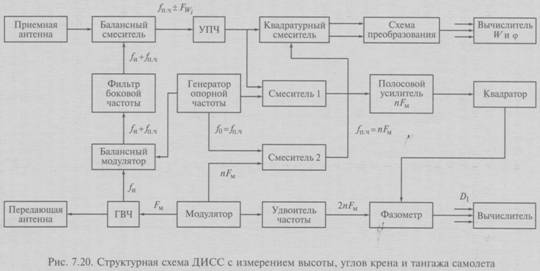
 Такой комбинированный измеритель очень удобен для вертолетов
и космических аппаратов с мягкой посадкой.
Такой комбинированный измеритель очень удобен для вертолетов
и космических аппаратов с мягкой посадкой.
7.6. Корреляционный метод измерения
путевой скорости и угла сноса
Принцип корреляционного метода
измерения путевой скорости W и угла сноса ф заключается в измерении времени задержки между
отраженными от подстилающей поверхности сигналами, принимаемыми разнесенными
антеннами, расположенными на ЛА.
Предположим сначала, что передающая
антенна Аи, две приемные антенны А1 и А2 (рис. 7.21, а)
расположены на продольной оси ЛА на расстоянии d и имеют ДНА, направленные вертикально вниз, а полет
происходит без сноса 
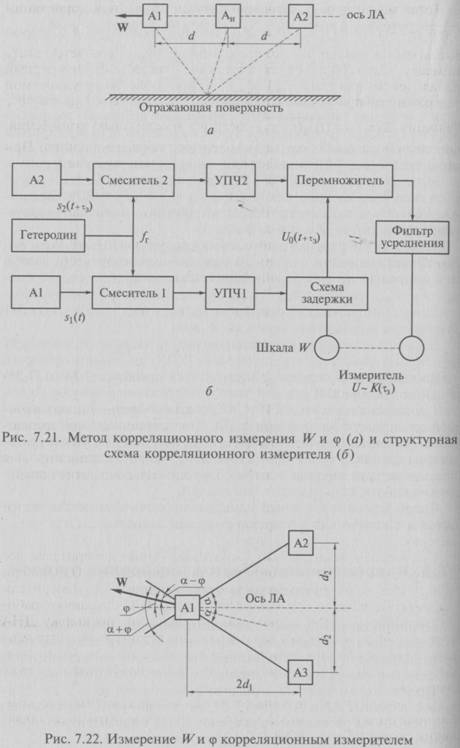
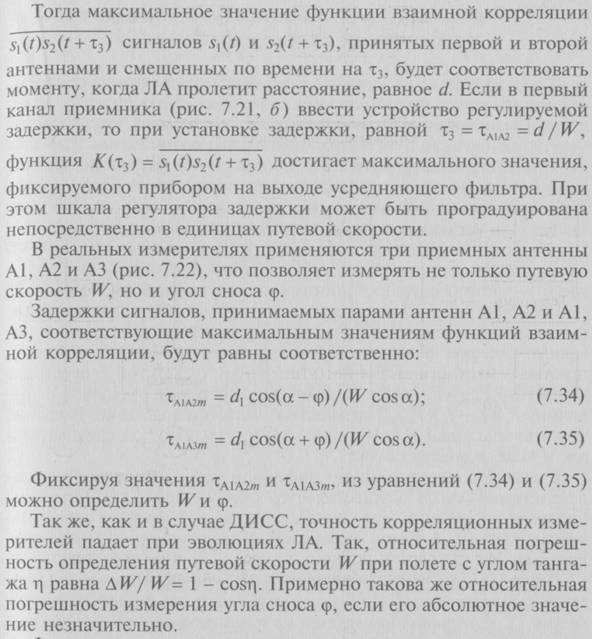 Флуктуационная погрешность корреляционных измерителей
связана с ограниченным временем усреднения в реальных измерителях.
Флуктуационная погрешность корреляционных измерителей
связана с ограниченным временем усреднения в реальных измерителях.
Сравнение допплеровских и
корреляционных измерителей показывает, что по точности они примерно
равноценны. Однако при полете над водной поверхностью корреляционные измерители
предпочтительнее, так как в отличие от ДИСС сохраняют работоспособность и при
спокойной поверхности, поскольку ДНА корреляционных измерителей направлены
вертикально и отраженные сигналы при спокойной поверхности не только не
пропадают, как в ДИСС с наклонным облучением поверхности, а даже возрастают.
На основе корреляционного метода
возможно создание комбинированного измерителя для определения высоты и
составляющих скорости полета ЛА.
7.7. Беззапросный и запросный
измерители радиальной
скорости объектов
В беззапросном измерителе
радиальная составляющая скорости vr измеряется по допплеровскому смещению частоты fи,
излучаемой высокостабильным генератором колебаний, расположенным на
движущемся объекте. Допплеровское смещение Fv в случаях, когда vr много меньше скорости распространения радиоволн с и
релятивистскими эффектами можно пренебречь, может быть найдено по формуле
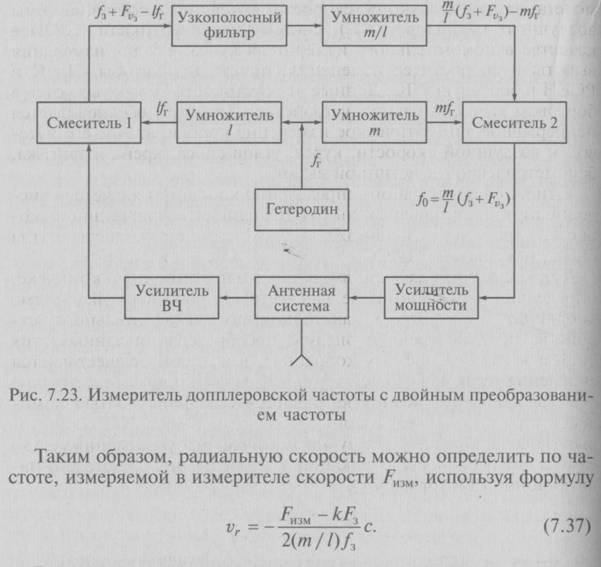
В командно-измерительных комплексах
находят применение измерители скорости, в которых используются Беззапросный и
запросный методы измерения, выбираемые по команде в зависимости от решаемой
системой задачи*.
7.8. Измерители координат и скорости в
составе
навигационного комплекса
Возрастающие требования к точности
и надежности управления полетом J1A удовлетворяются как путем улучшения характеристик отдельных
измерителей, так и объединением их в единый навигационный комплекс.
В состав комплекса (рис. 7.24) в
различных сочетаниях включают инерциальную навигационную систему (ИНС),
допплеровский (корреляционный) измеритель путевой скорости и угла сноса самолета,
датчик воздушной скорости, входящий в состав системы воздушных сигналов (СВС),
систему курсо вертикали (СКВ) в качестве вспомогательного измерителя курса, РВ
для измерения высоты и скорости ее изменения, приемоиндикаторы СРНС и РСБН и
бортовую РЛС. Данные этих устройств обрабатываются в бортовом вычислительном
устройстве. При этом обеспечивается непрерывное автоматическое измерение
координат ЛА, его путевой и воздушной скорости, курса, углов сноса, крена и
тангажа, барометрической и истинной высот.
Основой непрерывного определения
координат является счисление пути с помощью данных И НС, измерителя воздушной
скорости, курса, крена и тангажа, а также путевой скорости и угла сноса,
измеряемых ДИСС.
Так как датчики систем, входящих в
навигационный комплекс, определяют навигационные параметры в собственной
системе координат, в алгоритмах навигационного вычислительного устройства
предусмотрена процедура преобразования данных этих систем в единую систему
координат, в которой осуществляется счисление пути.
Навигационный комплекс является
составной частью комплекса пилотажно-навигационного оборудования (КПНО), который
включает также систему автоматического управления (САУ) самолетом и системы
индикации и отображения пилотажно-навигационной информации. 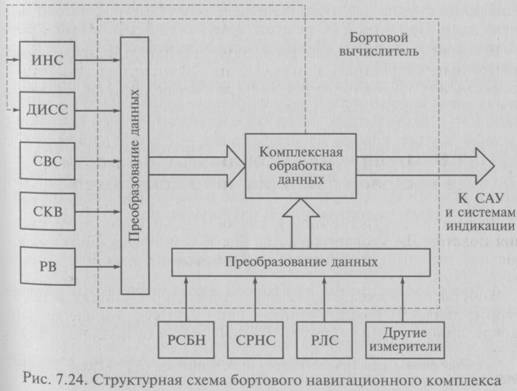
В круг задач, решаемых КПНО, помимо
непрерывного определения координат и вектора скорости самолета, входят программирование
маршрута полета, вычисление и передача в САУ управляющих сигналов, выдача
информации системам индикации и отображения информации, автоматический контроль
исправности бортовых устройств и систем КПНО, а также автоматическая
стабилизация полета.
В последние годы круг задач,
решаемых радиоэлектронными средствами обеспечения безопасности полетов и
организации воздушного движения, чрезвычайно расширился. В употребление вошли
новые названия этой области техники: авионика и ветроника. Термин «авионика» означает
радиоэлектроника обслуживания полетов авиации, «ветроника» — от англ. vehicle radioelectronic, т.е. совокупность радиоэлектронных средств, используемых на
борту ВС. В понятие «авионика» иногда включают не только бортовые радиосистемы
управления полетом, но также радиоэлектронное обеспечение всех видов
деятельности наземных авиационных служб: системы УВД, системы посадки, линии
передачи данных, системы аэродромных средств организации пассажиропотоков и
др.
Особое значение приобрели комплексы
управления высокоточным оружием (ВТО), разработке которого в настоящее время
уделяется большое внимание и выделяются огромные средства во многих странах
мира. Понятие «высокоточное оружие» обычно связывают с возможностью
гарантированного поражения заданной цели в группе или избирательного попадания
в заданный элемент цели. При этом РТС решают задачи обнаружения, распознавания,
идентификации и точного определения координат и параметров движения цели.
Обнаружение здесь связывается с
селекцией цели на фоне подстилающей поверхности и разнообразных видов помех,
распознавание — с различением целей определенного класса в группе с целями
другого класса, идентификация — с различением заданных целей от других целей
того же класса.
Решение этих задач потребовало разработки
новых и глубокой модернизации существующих средств радиоэлектроники и прежде
всего систем радиолокации и радионавигации.
Контрольные вопросы
1.Что такое постоянная погрешность
дальномера, каковы причины ее появления и пути уменьшения?
2.Чем определяется потенциальное
значение точности и разрешающей способности частотного дальномера?
3.При каких условиях возможно
раздельное однозначное измерение дальности и радиальной скорости объекта
частотным дальномером?
4.В каких случаях возможно
применение нелинейного закона ЧМ при измерении дальности частотным методом?
5.В чем особенность измерения
дальности многих объектов частотным методом?
6.Сравните преимущества и
недостатки импульсного и частотного методов измерения дальности.
7.Укажите особенности применения
4Mb радиовысотомерах и возможные пути повышения точности измерения высоты.
8.Выберите необходимые значения
девиации частоты Wf и периода модуляции Тm частотного дальномера, работающего в
трехсантиметровом диапазоне  если задан диапазон измеряемых дальностей
от
если задан диапазон измеряемых дальностей
от  , а максимальная радиальная скорость цели
, а максимальная радиальная скорость цели
 . Разрешаемое дальномером расстояние
. Разрешаемое дальномером расстояние  должно быть не более 30 м.
должно быть не более 30 м.
9.Как можно осуществить
автоматическое сопровождение по дальности частотным дальномером?
10.В чем заключается принцип
действия цифрового частотного дальномера?
11.В чем заключаются причины
больших погрешностей измерения однолучевых ДИСС?
12.Точность измерения какого
параметра и почему повышается при использовании одностороннего двухлучевого
ДИСС?
13.Каким образом должны быть
расположены лучи двухлучевого ДИСС для получения высокой точности измерения
путевой скорости?
14.Каковы достоинства трехлучевых и
четырехлучевых ДИСС?
15.Сравните преимущества и
недостатки ДИСС с непрерывным и импульсным излучением.
16.Как определяется угол сноса и
путевая скорость ДИСС, работающего в автокогерентном режиме?
17.Какие преимущества дает
применение в ДИСС частотной модуляции излучаемого сигнала?
18.В чем заключается корреляционный
метод измерения путевой скорости и угла сноса?
19Определите допустимую погрешность
в установке угла облучения  в случае однолучевого и двухстороннего
двухлучевого ДИСС для получения относительной погрешности измерения путевой
скорости, не превышающей 0,15 %.
в случае однолучевого и двухстороннего
двухлучевого ДИСС для получения относительной погрешности измерения путевой
скорости, не превышающей 0,15 %.