ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОСИСТЕМ
3.1. Дальность действия радиолиний
Дальность действия является одной
из важнейших характеристик большинства радиосистем. Под дальностью действия
системы понимают максимальное расстояние D=Dmax, на котором принимаемый сигнал достигает
минимально допустимого (порогового) уровня мощности
Рс = Рс min, еще достаточного для выполнения системой основных функций с
качественными показателями не хуже заданных.
Рассмотрим максимальную дальность
действия радиолиний трех типов, используемых в радиосистемах различного
назначения: радиолинии связи, радиолинии с активным ответом и радиолинии с
пассивным ответом.
Дальность действия линии
радиосвязи. Радиолиния связи состоит из передатчика и приемника радиосигнала.
Предположим, что в радиолинии используются радиоволны длиной  мощность излучаемых передающей антенной колебаний Ри,
ее коэффициент усиления Gи, коэффициент усиления приемной антенны Сп, а чувствительность приемника (мощность
порогового сигнала) Рс min .
мощность излучаемых передающей антенной колебаний Ри,
ее коэффициент усиления Gи, коэффициент усиления приемной антенны Сп, а чувствительность приемника (мощность
порогового сигнала) Рс min .
Плотность потока мощности,
создаваемого излучаемым сигналом в месте расположения приемной антенны на
расстоянии D от передающей, составит  , а мощность сигнала в приемной антенне
, а мощность сигнала в приемной антенне

где  — эффективная площадь приемной антенны,
— эффективная площадь приемной антенны, 
При увеличении дальности D мощность принимаемого сигнала падает и,
наконец, достигает порогового уровня Рс = Рс min, ограничивающего максимальное значение
дальности радиолинии

Значение Pcmin определяется приведенным ко входу отношением сигнала к
помехе (включая и собственный шум приемного устройства), необходимым для
извлечения информации с заданной достоверностью.
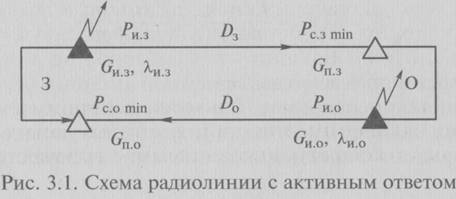
Радиолиния с активным ответом . Радиолиния с активным ответом (рис.
3.1) состоит из двух радиолиний связи: линии запроса и линии ответа. Для каждой
из них можно найти максимальную дальность действия по формуле (3.1), присвоив
параметрам, относящимся к линии запроса и ответа, соответствующие индексы 
Результирующая дальность действия
системы будет определяться радиолинией с меньшей дальностью действия.
Естественно стремление сделать каналы запроса и ответа равнопрочными, а
систему сбалансированной, т. е. обеспечить 
Если в запросчике и ответчике для
передачи и приема используется одна антенна и частоты запросного и ответного
сигналов близки, т.е.  и, следовательно,
и, следовательно,  .
.
Отсюда найдем условие баланса
системы 
В качестве примера приведем данные
космической радиолинии с активным ответом, работающей в диапазоне = 6 см. Параметры линии запроса: 
 параметры линии ответа:
параметры линии ответа:  Проверим балансировку системы
Проверим балансировку системы 

Таким образом, система близка к
балансу с некоторым запасом надежности (+3 дБ) запросного канала, поскольку
для запросчика,
расположенного на поверхности
Земли, легче создать большую антенну с высокой направленностью, мощный передатчик
и высокочувствительный приемник.
Радиолиния с пассивным ответом. В
этом случае ответный сигнал создается при рассеянии радиоволн облучаемым
объектом с ЭПР  , а запросчиком является PJIC или радиовысотомер. Предположим: PJIC излучает зондирующий сигнал мощностью Ри, коэффициент
усиления ее передающей антенны Gи, а приемной — Gп, соответственно эффективная площадь
, а запросчиком является PJIC или радиовысотомер. Предположим: PJIC излучает зондирующий сигнал мощностью Ри, коэффициент
усиления ее передающей антенны Gи, а приемной — Gп, соответственно эффективная площадь  чувствительность
приемника Рс min. При расстоянии от PЛC до цели D плотность потока мощности у цели будет
чувствительность
приемника Рс min. При расстоянии от PЛC до цели D плотность потока мощности у цели будет  а мощность,
а мощность,

По определению ЭПР вся эта
мощность рассеивается целью изотропно, следовательно, плотность потока мощности
у антенны PЛC на расстоянии D от цели составит 
При увеличении дальности D мощность сигнала Рс падает, достигая порогового
уровня
Рс = Рс min при

Это выражение носит название
основного уравнения радиолокации, или уравнения дальности РЛС в свободном
пространстве. Оно отражает связь дальности действия РЛС с ее основными
параметрами и ЭПР цели.
Параметры Рс
min и  имеют статистический характер и зависят от многих
факторов. В основном уравнении не учитываются потери при распространении
сигнала, потери в
имеют статистический характер и зависят от многих
факторов. В основном уравнении не учитываются потери при распространении
сигнала, потери в
антенно-фидерном тракте и других
устройствах РЛС при формировании, приеме и обработке сигнала. Влияние этих
факторов на дальность действия РТС рассматривается далее.
Особенности определения дальности
действия многопозиционных радиолокационных станций, в которых зона обзора зависит
от состава и конфигурации системы, заключаются в следующем.
В системе, состоящей из независимых
PJIC, рассчитывается  каждой из них относительно точки ее расположения (позиции).
Затем строится зона обзора системы, состоящая из круговых зон обзора с радиусом
Dmax и центрами в точках расположения РЛС. Внешний контур
частично перекрывающихся рабочих зон РЛС и определяет предельную дальность
действия МПРЛС.
каждой из них относительно точки ее расположения (позиции).
Затем строится зона обзора системы, состоящая из круговых зон обзора с радиусом
Dmax и центрами в точках расположения РЛС. Внешний контур
частично перекрывающихся рабочих зон РЛС и определяет предельную дальность
действия МПРЛС.
Сложнее определить дальность
действия многопозиционных систем, состоящих из передатчика и нескольких
приемников, расположенных в различных точках пространства.
Для бистатической РЛС с
разнесенными передатчиком и приемником дальность действия зависит от взаимного
положения передатчика, приемника и цели, .параметров ДН передающей и приемной
антенн, энергии излучаемых сигналов и чувствительности приемника, а также вида
сканировани^передающей и приемной антенн. По существу, необходимо рассматривать
дальность действия линий связи при передаче и приеме сигналов для различных
взаимных положений ДН передающей и приемной антенн. Таким образом, рабочая
область РЛС будет иметь меняющуюся во времени конфигурацию и может быть построена
для конкретных данных системы, что, конечно, относится и к случаю нескольких
приемников в составе многопозиционной РЛС.
3.2. Обобщенное уравнение дальности
радиолокационного
наблюдения в свободном пространстве
При расчете дальности
радиолокационного наблюдения определенной цели обычно используют среднее
значение ее ЭПР  ,а возможные флуктуации ЭПР учитывают выбором модели
принимаемого сигнала (видом флуктуации его огибающей и фазы). Таким образом,
для определения порогового сигнала
,а возможные флуктуации ЭПР учитывают выбором модели
принимаемого сигнала (видом флуктуации его огибающей и фазы). Таким образом,
для определения порогового сигнала  в уравнении (3.4) нужно знать характер
сигнала и помех, заданные значения вероятности правильного обнаружения
в уравнении (3.4) нужно знать характер
сигнала и помех, заданные значения вероятности правильного обнаружения  и вероятность ложной тревоги
и вероятность ложной тревоги  . При этом структура и характеристики
приемника, устройств обработки и регистрации сигнала выбираются так, чтобы
свести
. При этом структура и характеристики
приемника, устройств обработки и регистрации сигнала выбираются так, чтобы
свести  к возможно более низкому уровню, обеспечивающему
максимальную дальность действия РЛС.
к возможно более низкому уровню, обеспечивающему
максимальную дальность действия РЛС.
Рассмотрим определение  при воздействии помехи типа «нормальный белый шум» с
равномерной спектральной плотностью мощности N0/2.
Для сигнала с полностью известными
параметрами вероятность правильного обнаружения
при воздействии помехи типа «нормальный белый шум» с
равномерной спектральной плотностью мощности N0/2.
Для сигнала с полностью известными
параметрами вероятность правильного обнаружения  при заданной вероятности ложной тревоги
при заданной вероятности ложной тревоги  зависит от отношения сигнал/ шум на выходе согласованного
фильтра (СФ) или любого другого оптимального приемника
зависит от отношения сигнал/ шум на выходе согласованного
фильтра (СФ) или любого другого оптимального приемника  , где Е — энергия
обнаруживаемого сигнала.
, где Е — энергия
обнаруживаемого сигнала.
В радиолокации обычно используется
критерий Неймана — Пирсона, в соответствии с которым оптимальный приемник
должен обеспечивать получение наибольшего значения  при заданном
при заданном  . Для определения минимального значения q = qmin, при котором
. Для определения минимального значения q = qmin, при котором  еще не меньше заданного, а вероятность
ложной тревоги рлт не превышает допустимой, используются
характеристики обнаружения. Подробнее вопрос обнаружения сигналов рассмотрен в
гл. 4.
еще не меньше заданного, а вероятность
ложной тревоги рлт не превышает допустимой, используются
характеристики обнаружения. Подробнее вопрос обнаружения сигналов рассмотрен в
гл. 4.
Величина  , равная отношению
сигнала к шуму на выходе СФ (входе порогового устройства), называется параметром
обнаружения. Для флуктуирующего сигнала под E понимается его средняя энергия. В
случае импульсной РЛС с зондирующим импульсом с прямоугольной огибающей
длительности
, равная отношению
сигнала к шуму на выходе СФ (входе порогового устройства), называется параметром
обнаружения. Для флуктуирующего сигнала под E понимается его средняя энергия. В
случае импульсной РЛС с зондирующим импульсом с прямоугольной огибающей
длительности  и точечной цели сигнал на входе приемника также имеет
длительность
и точечной цели сигнал на входе приемника также имеет
длительность  и при мощности сигнала Рс его энергия равна
и при мощности сигнала Рс его энергия равна  Если амплитуда напряжения сигнала Uc max, то при входном сопротивлении 1 Ом энергию сигнала можно
представить в виде
Если амплитуда напряжения сигнала Uc max, то при входном сопротивлении 1 Ом энергию сигнала можно
представить в виде  . Тогда параметр
обнаружения
. Тогда параметр
обнаружения

Представляя мощность порогового
сигнала Рс min, входящего в основное уравнение радиолокации (3.4), через параметр
обнаружжения  можно непосредственно использовать характеристики
обнаружения при определении максимальной дальности действия РЛС. Отклонение
характеристик приемника от оптимальных учитывается введением коэффициента
потерь Ln> 1, который применительно к РЛС обнаружения с индикатором на
ЭЛТ называется коэффициентом различимости, так как показывает, во сколько раз
(на сколько Децибел) надо увеличить мощность сигнала в реальной системе, чтобы
обеспечить заданные параметры обнаружения сигнала. Таким образом, с учетом
потерь выражение (3.4) приводится к виду
можно непосредственно использовать характеристики
обнаружения при определении максимальной дальности действия РЛС. Отклонение
характеристик приемника от оптимальных учитывается введением коэффициента
потерь Ln> 1, который применительно к РЛС обнаружения с индикатором на
ЭЛТ называется коэффициентом различимости, так как показывает, во сколько раз
(на сколько Децибел) надо увеличить мощность сигнала в реальной системе, чтобы
обеспечить заданные параметры обнаружения сигнала. Таким образом, с учетом
потерь выражение (3.4) приводится к виду

Уравнение дальности в этой форме
называется обобщенным уравнением дальности, или обобщенным уравнением
радиолокации.
В том случае, когда источниками
помех являются шумы антенны мощностью  и шумы приемника с приведенной к входу
мощностью
и шумы приемника с приведенной к входу
мощностью  , полная мощность шумов на входе приемника равна
, полная мощность шумов на входе приемника равна  Если ширина полосы пропускания приемного тракта
Если ширина полосы пропускания приемного тракта  а температура антенны
а температура антенны  постоянная Больцмана,
постоянная Больцмана, 
Обычно спектральную плотность шума N0 представляют через шумовую температуру
Коэффициент потерь Lп характеризует
результат воздействия многих факторов и может быть представлен в виде
произведения соответствующих коэффициентов потерь  . Эти потери могут быть вызваны затуханием
сигнала на трассе и в антенно- фидерном устройстве, несогласованностью
амплитудно-частотной характеристики (АЧХ) приемника со спектром сигнала, потерями
при детектировании, нестабильностью порога, нестабильностью частоты гетеродина
приемника, сканированием ДНА и другими причинами.
. Эти потери могут быть вызваны затуханием
сигнала на трассе и в антенно- фидерном устройстве, несогласованностью
амплитудно-частотной характеристики (АЧХ) приемника со спектром сигнала, потерями
при детектировании, нестабильностью порога, нестабильностью частоты гетеродина
приемника, сканированием ДНА и другими причинами.
Часто уравнение (3.6) представляют
в логарифмической форме и все величины, в том числе и коэффициенты потерь, подставляют
в децибелах, заменяя умножение параметров их суммированием, а деление —
вычитанием. Анализируя уравнение (3.6), видим, что для увеличения Dmax, например, в 2 раза
надо увеличить энергию импульса в 16 раз, что соответствует 12 дБ. То же
относится и к другим параметрам, входящим в формулы для Dmax в
первой степени.
В импульсных РЛС при передаче и
приеме обычно используется одна и та же антенна, поэтому  и формула для Dmax принимает вид
и формула для Dmax принимает вид
Отсюда видно, что увеличения Dmax в 2 раза можно
достигнуть увеличением коэффициента усиления G в 4 раза.
Следует подчеркнуть, что
приведенные формулы для Dmax относятся к случаю обнаружения одиночного импульса. В
действительности в режиме обзора от цели за один обзор принимается пачка
отраженных импульсов. Так, для когерентной PЛC кругового обзора с частотой повторения излучаемых импульсов Fп, ДНА шириной  , вращающейся с угловой скоростью
, вращающейся с угловой скоростью  , число импульсов в пачке
, число импульсов в пачке  Накоплением принимаемых импульсов можно
снизить (улучшить) требуемое для получения заданной величины
Накоплением принимаемых импульсов можно
снизить (улучшить) требуемое для получения заданной величины  отношение сигнала к шуму на входе приемника в ку раз.
отношение сигнала к шуму на входе приемника в ку раз.
Коэффициент улучшения ку
зависит от характера принимаемых сигналов (когерентный или некогерентный
пакет), ДНА, определяющей при заданных скорости вращения антенны и периоде
следования сигналов число и амплитудные соотношения накапливаемых импульсов.
Изменение амплитуды может быть учтено соответствующим увеличением коэффициента
потерь Lп в уравнении дальности (3.6), которое с
учетом накопления принимает вид
Для рассматриваемого примера
использование додетекторного (когерентного) накопления
Nпач = 25 импульсов позволяет теоретически
увеличить 
Оценку увеличения дальности действия
PЛC при последетек- торном накоплении импульсов можно получить,
используя графики зависимости требуемого отношения сигнала к шуму q от числа накапливаемых импульсов*.
Следует заметить, что расчет Dmax для реальных условий
работы PJIC представляет собой достаточно сложную задачу, так как кроме
упомянутых источников потерь должны быть учтены потери при распространении
сигнала, а также влияние отражений от подстилающей поверхности (суши или моря).
3.3. Влияние отражения радиоволн от
земной
поверхности на дальность действия РЛС
При наличии в пределах главного
лепестка ДНА PJIC хорошо проводящей подстилающей поверхности или других
местных предметов, переотражающих энергию зондирующего сигнала в направлении
цели, проявляется эффект интерференции прямого и переотраженных сигналов,
прошедших по различным траекториям.
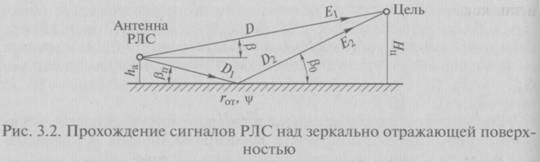
Рассмотрим влияние на дальность
действия РЛС отражения радиоволн от земной поверхности, для случая, когда ее
можно считать зеркально отражающей плоскостью, что реально соответствует
прохождению радиоволн над спокойной поверхностью моря (рис. 3.2). При этом
точка переотражения зондирующего сигнала находится на дальности, существенно
меньшей дальности горизонта.
Модуль напряженности поля в месте
расположения цели 
будет равен модулю суммы напряженностей
прямой и отраженной  волн:
волн: 
где  — модуль коэффициента отражения
поверхности; у — разность фаз прямой и отраженной радиоволн у цели,
— модуль коэффициента отражения
поверхности; у — разность фаз прямой и отраженной радиоволн у цели,  — изменение фазы при отражении;
— изменение фазы при отражении;  — набег фазы за счет разности расстояний до цели
— набег фазы за счет разности расстояний до цели 
Введем в рассмотрение
интерференционный множитель 
Для наземных или корабельных РЛС
обнаружения обычно выполняется условие  т.е. угол места цели
т.е. угол места цели  мал, как и углы
мал, как и углы  что позволяет при горизонтальной
поляризации радиоволн считать
что позволяет при горизонтальной
поляризации радиоволн считать  . В этом случае
. В этом случае 
где  — высоты расположения антенны РЛС и цели
соответственно.
— высоты расположения антенны РЛС и цели
соответственно.
Таким образом, множитель F0 изменяется по колебательному закону,
достигая максимального значения F0 = 2 в направлениях, где аргумент синуса
равен нечетному числу  и падает до 0 в направлениях, где аргумент равен
целому числу л. Следовательно, зависимость F0 от р имеет лепестковый характер, причем число лепестков
и падает до 0 в направлениях, где аргумент равен
целому числу л. Следовательно, зависимость F0 от р имеет лепестковый характер, причем число лепестков 
При вертикальной поляризации
излучаемых сигналов полученные результаты справедливы только для  , так как с увеличением
, так как с увеличением  значения
значения  и
и  изменяются, причем характер этих изменений
сильно зависит от частоты, на которой работает РЛС.
изменяются, причем характер этих изменений
сильно зависит от частоты, на которой работает РЛС.
С учетом интерференционного
множителя результирующий коэффициент усиления антенны по мощности будет Gp = F02G. В случае использования одной антенны при
излучении и приеме сигнала обобщенное уравнение дальности (3.7) с учетом
отражения от земной поверхности приводится к виду

При обнаружении низко расположенных
объектов (низколетящих целей)  , угол
, угол  мал и
мал и  . В этом случае цель
находится в нижней части первого лепестка результирующей ДНА и максимальная
дальность обнаружения
. В этом случае цель
находится в нижней части первого лепестка результирующей ДНА и максимальная
дальность обнаружения

Таким образом, дальность
обнаружения кораблей и низколетящих ЛА связана с энергией зондирующего
импульса уже корнем восьмой степени, и для увеличения дальности действия РЛС в
два раза энергию импульса требуется увеличить в 256 раз.
Условием, при котором цель
считается низколетящей, является неравенство


условия можно определить граничное
расстояние  при превышении которого для расчета Domax можно использовать формулу (3.11). Для увеличения Domax необходимо
увеличивать отношение
при превышении которого для расчета Domax можно использовать формулу (3.11). Для увеличения Domax необходимо
увеличивать отношение 
Отсюда следует также, что для
приближения к РЛС на возможно малое расстояние, оставаясь необнаруженным, ЛА
должен лететь на минимально возможной высоте Hц.
Именно это условие и выполняется при полете крылатых ракет.
Если отражающая поверхность
шероховатая (например, поверхность моря при волнении), то в дополнение к
зеркальному отражению возникает диффузное рассеяние. При вычислении множителя F0 рассеянный сигнал обычно отдельно не
рассматривается, а объединяется с прямой и отраженной волнами. При этом
принимаемый сигнал становится флуктуирующим даже при отсутствии флуктуаций ЭПР
цели, что подробно обсуждалось в предыдущей главе.
При отражении радиоволн от неровной
или слабо проводящей поверхности введенные ранее предположения относительно rот и у уже не справедливы и вычисление F0 необходимо производить по исходной
формуле (3.8). Так как в этих случаях всегда roт< 1, то пределы изменения F0 будут меньше, чем для идеально отражающей поверхности, хотя
лепестковый характер диаграммы изменения сигнала в зависимости от угла места
цели сохранится.
До сих пор рассматривалось
радиолокационное наблюдение на дальностях, при которых земная поверхность могла
считаться плоской. Кривизна земной поверхности ограничивает дальность радиолокационного
обнаружения. В оптическом диапазоне волн дальность наблюдения ограничена
дальностью прямой видимости (дальностью горизонта) 
Если дальность радиолокационного
наблюдения не превышает Dr., то расчет Dmax может выполняться по
полученным интерференционным формулам с учетом поправки на кривизну земной
поверхности. При выполнении условия  учет сферичности земной поверхности
сводится к замене истинной высоты цели
учет сферичности земной поверхности
сводится к замене истинной высоты цели  (рис. 3.3) приведенной высотой
(рис. 3.3) приведенной высотой 
 При этом вид зоны обнаружения в вертикальной плоскости
(диаграммы видимости) остается таким же, как и для «плоской» Земли, а ее
поверхность будет представлена кривой (см. рис. 3.3), уравнение которой имеет
вид
При этом вид зоны обнаружения в вертикальной плоскости
(диаграммы видимости) остается таким же, как и для «плоской» Земли, а ее
поверхность будет представлена кривой (см. рис. 3.3), уравнение которой имеет
вид  . Линии равных высот Hц = const будут параллельны этой линии. Из рис. 3.3 непосредственно
видно, что кривизна земной поверхности уменьшает дальность радиолокационного
наблюдения низко расположенных объектов. Для сохранения дальности необходимо
увеличивать высоту расположения антенны РЛС или увеличивать энергетический
потенциал станции, повышая энергию зондирующего импульса, направленность
антенны и чувствительность приемника.
. Линии равных высот Hц = const будут параллельны этой линии. Из рис. 3.3 непосредственно
видно, что кривизна земной поверхности уменьшает дальность радиолокационного
наблюдения низко расположенных объектов. Для сохранения дальности необходимо
увеличивать высоту расположения антенны РЛС или увеличивать энергетический
потенциал станции, повышая энергию зондирующего импульса, направленность
антенны и чувствительность приемника.
В реальных условиях работы РЛС
приходится учитывать также влияние рельефа местности и наличие сильно
отражающих объектов вокруг РЛС на ее зоны обнаружения. Создаваемые ими дополнительные
отражения искажают диаграмму видимости РЛС, снижая дальность обнаружения и
точность местоопределения цели. Поэтому стремятся по возможности располагать
РЛС на ровной площадке, свободной от сильных отражателей в секторе обзора РЛС.
Кроме отражений от поверхности
Земли и местных предметов на работу РЛС и РНС существенное влияние оказывают и
иные причины, связанные с условием распространения радиоволн.
3.4. Влияние условий распространения
радиоволн на дальность действия радиолокационных и радионавигационных систем
При определении дальности действия
РТС приходится учитывать поглощение и преломление радиоволн при их
распространении в атмосфере, их отражение от ионосферы, влияние подстилающей
поверхности вдоль трассы, по которой распространяется радиосигнал. Степень
влияния этих факторов зависит от частотного диапазона РТС и условий ее
эксплуатации (время суток, географический район, высоты передатчика и
приемника).
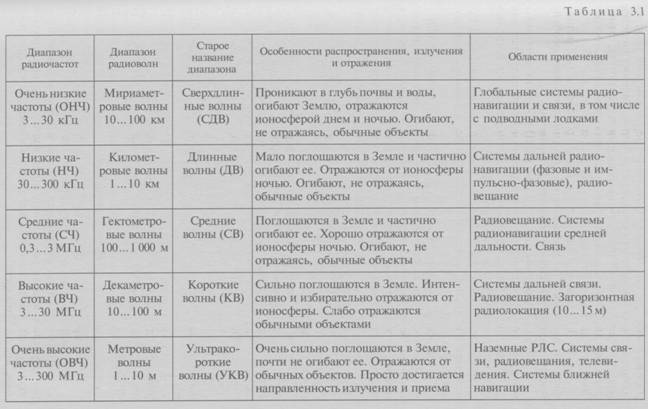
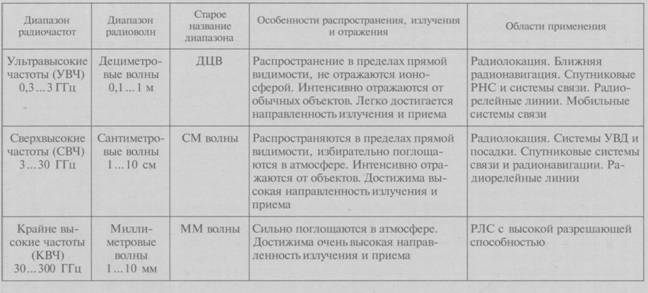
В табл. 3.1 приведено принятое в
России распределение радиочастот и радиоволн по диапазонам с кратким указанием
особенностей распространения и областей применения.
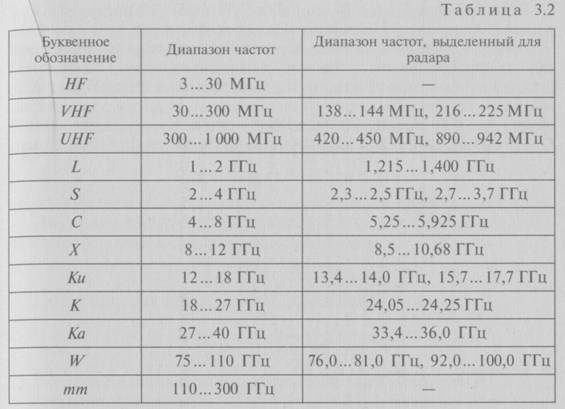
В табл. 3.2 приведены используемые
в США буквенные обозначения частотных диапазонов и поддиапазонов, выделенных
для радиолокации. В последнее время эти обозначения все шире используются и в
отечественной литературе.
Влияние поглощения и преломления
радиоволн наиболее существенно в нижнем основном слое атмосферы, называемом
тропосферой.
Тропосфера простирается до высот
8... 10 км в полярных районах и до 16... 18 км в тропических широтах Земного шара. В тропосфере сосредоточена основная часть водяного пара, образуются облака и
турбулентные потоки, что оказывает сильное влияние на распространение
радиоволн, особенно миллиметрового, сантиметрового и дециметрового диапазонов,
используемых в радиолокации и ближней радионавигации.
Отражение от ионосферы наиболее
сильно сказывается на декаметровых и более длинных волнах, используемых в РТС
навигации и связи.
Влияние затухания радиоволн в
тропосфере. Это влияние связано
с их поглощением в молекулах кислорода и водяного пара, гидрометеорами (дождь,
туман, снег) и твердыми частицами (дым, пыль), а также с рассеянием радиоволн
жидкими и твердыми частицами. Поглощение и рассеяние радиоволн ведет к снижению
плотности потока мощности радиоволны с расстоянием по экспоненциальному
закону. Снижение мощности зависит от коэффициента затухания а3 и
расстояния D, проходимого радиоволнами.
Если коэффициент а3
вдоль всей трассы постоянен и рассматривается случай активной РЛС с пассивным
ответом, то мощность сигнала на входе приемника уменьшается за счет затухания
от Рс.о до

Если выразить 
При наличии в атмосфере
гидрометеоров и других частиц коэффициент затухания а3 является
суммой частных коэффициентов затухания, вызванных поглощением молекулами
кислорода и водяного пара, а также влиянием жидких и твердых частиц, распыленных
в атмосфере.
Молекулярное поглощение в атмосфере
происходит в основном на частотах, близких к резонансным, свойственным молекулам
данного вещества. Резонансные линии всех газов атмосферы, за исключением
кислорода и водяного пара, расположены вне диапазона радиоволн, поэтому
существенное влияние на дальность действия РТС оказывает только поглощение
молекулами кислорода и водяного пара. Поглощение молекулами водяного пара имеет
максимум на волне  , а молекулами кислорода — на волнах
, а молекулами кислорода — на волнах  . Таким образом, молекулярное поглощение существенно в
сантиметровом и особенно в миллиметровом диапазонах, где оно является
фактором, сильно ограничивающим дальность действия радиосистем, особенно
радиолокационных, работающих по отраженным сигналам.
. Таким образом, молекулярное поглощение существенно в
сантиметровом и особенно в миллиметровом диапазонах, где оно является
фактором, сильно ограничивающим дальность действия радиосистем, особенно
радиолокационных, работающих по отраженным сигналам.
Другой причиной, вызывающей потери
энергии сигнала при распространении, является рассеяние, прежде всего дождевыми
каплями и туманом. Чем больше отношение радиуса капли  к длине волны
к длине волны  тем больше потери энергии за счет ее
рассеяния во всех направлениях. Это рассеяние возрастает пропорционально
четвертой степени частоты, поскольку ЭПР капли при
тем больше потери энергии за счет ее
рассеяния во всех направлениях. Это рассеяние возрастает пропорционально
четвертой степени частоты, поскольку ЭПР капли при  определяется по формуле
определяется по формуле

где  — диэлектрическая постоянная воды.
— диэлектрическая постоянная воды.
Если известны диаметр капель и их
число на единицу объема, то можно определить величину коэффициента затухания  .
.
В справочниках величина для дождя обычно указывается в зависимости от его
интенсивности I и длины волны  сантиметровом диапазоне коэффициент затухания изменяется
приблизительно пропорционально квадрату частоты сигнала
сантиметровом диапазоне коэффициент затухания изменяется
приблизительно пропорционально квадрату частоты сигнала  . Так, если на частоте = 3 000 МГц = 0,002 дБ/км при I= 1 мм/ч, то на частоте = 30 000 МГц при той же интенсивности дождя = 0,18 дБ/км.
. Так, если на частоте = 3 000 МГц = 0,002 дБ/км при I= 1 мм/ч, то на частоте = 30 000 МГц при той же интенсивности дождя = 0,18 дБ/км. 
Ослабление в тумане прямо
пропорционально концентрации воды в тумане. Ослабление градом и снегом
значительно меньше, чем дождем или туманом, и их влиянием обычно пренебрегают.
На рис. 3.4 представлены зависимости а3 от длины волны для водяного
пара, кислорода, тумана и дождя различной интенсивности.
Максимальная дальность действия РЛС
с учетом затухания может быть найдена по формуле

если известна дальность действия в
свободном пространстве 
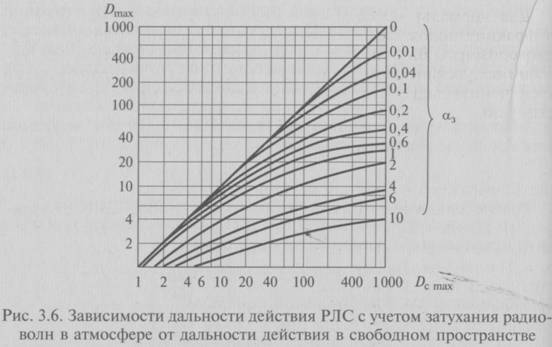
Это уравнение трансцендентно и его
можно решать графически, представляя в логарифмической форме:
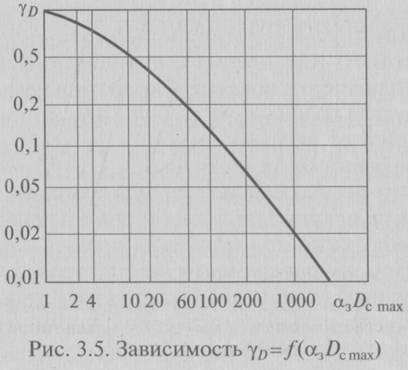
Обозначим относительное уменьшение
дальности  и запишем уравнение в виде, удобном для графического представления:
и запишем уравнение в виде, удобном для графического представления: 
На рис. 3.5 приведена зависимость  позволяющая при заданных
позволяющая при заданных  найти
найти  , а следовательно,
, а следовательно,  .
.
На рис. 3.6 представлены
зависимости  для значений от 0,01 до 10 дБ/км.
для значений от 0,01 до 10 дБ/км.
Для определения  в условиях дождя можно воспользоваться эмпирической
зависимостью = 0,3
в условиях дождя можно воспользоваться эмпирической
зависимостью = 0,3 где — коэффициент затухания, дБ/км; I— интенсивность
дождя, мм/ч;
где — коэффициент затухания, дБ/км; I— интенсивность
дождя, мм/ч;  — длина волны, см.
— длина волны, см.
На волнах длиннее 10 см влияние поглощения и рассеяния радиоволн незначительно и его в большинстве случаев можно не
учитывать.
Влияние рефракции волн в атмосфере. Рефракцией (преломлением, искривлением) радиоволн
называется отклонение распространения радиоволн от прямолинейного при
прохождении ими среды с изменяющимися электрическими параметрами. Преломляющие
свойства среды характеризуются коэффициентом преломления  , определяемым ее диэлектрической проницаемостью
, определяемым ее диэлектрической проницаемостью  .
.
Вместе с  коэффициент преломления
коэффициент преломления  в атмосфере изменяется с высотой Н. Как правило, это обусловлено изменением
температуры и влажности воздуха. Скорость изменения с высотой характеризуется градиентом
в атмосфере изменяется с высотой Н. Как правило, это обусловлено изменением
температуры и влажности воздуха. Скорость изменения с высотой характеризуется градиентом  , величина и знак которого
характеризуют рефракцию.
, величина и знак которого
характеризуют рефракцию.
При gn= 0 рефракция
отсутствует.
Если gn > 0, то рефракция
называется отрицательной и траектория радиоволны искривляется в сторону от
поверхности Земли.
При gn < 0 рефракция
положительна и траектория радиоволны искривлена в сторону поверхности Земли,
что приводит к огибанию ее радиоволной, увеличению дальности действия радиосистем
и, в частности, дальности радиолокационного обнаружения кораблей и низколетящих
ЛА.
Для нормального состояния атмосферы
 т.е. рефракция положительна, что ведет к увеличению
дальности радиогоризонта. Влияние нормальной рефракции учитывается кажущимся
увеличением радиуса Земли в 4/3 раза, что равносильно увеличению дальности
радиогоризонта («прямой радиовидимости») до
т.е. рефракция положительна, что ведет к увеличению
дальности радиогоризонта. Влияние нормальной рефракции учитывается кажущимся
увеличением радиуса Земли в 4/3 раза, что равносильно увеличению дальности
радиогоризонта («прямой радиовидимости») до

где Dr выражена в
километрах; ha и Hц — в метрах.
Радиус кривизны траектории
радиоволны обратно пропорционален градиенту  радиус
кривизны траектории радиоволны равен радиусу Земли
радиус
кривизны траектории радиоволны равен радиусу Земли  и радиоволна, направленная горизонтально, будет распространяться
параллельно поверхности Земли, огибая ее. Это случай критической рефракции, при
котором возможно значительное увеличение дальности действия РЛС.
и радиоволна, направленная горизонтально, будет распространяться
параллельно поверхности Земли, огибая ее. Это случай критической рефракции, при
котором возможно значительное увеличение дальности действия РЛС.
При аномальных условиях в
тропосфере (резкое увеличение давления, влажности, температуры) возможна и
сверхрефракция, при которой радиус кривизны траектории радиоволны становится
меньше радиуса Земли. При этом в тропосфере возможно волноводное
распространение радиоволн на большие расстояния, если антенна РЛС и объект
находятся в пределах слоя тропосферы, образующего волноводный канал.
Влияние подстилающей поверхности.
Кроме атмосферной рефракции огибание земной поверхности происходит в силу
дифракции радиоволн. Однако в зоне тени (за горизонтом) напряженность
радиоволн быстро падает из-за потерь в подстилающей поверхности, которые
быстро растут с увеличением частоты радиосигнала. Поэтому только на волнах
более 1 000 м поверхностная волна, т.е. волна, огибающая поверхность Земли,
может обеспечить большую дальность действия системы (несколько сотен и даже
тысяч километров). В связи с этим в РНС дальнего действия используются волны
длинноволнового и сверхдлинноволнового диапазонов.
Затухание поверхностной волны
зависит от диэлектрической постоянной е„ и проводимости оп
подстилающей поверхности. Для морской поверхности  для песчаных или горных пустынь
для песчаных или горных пустынь
 величина
величина  изменяется в пределах
изменяется в пределах  С уменьшением проводимости почвы затухание резко увеличивается,
поэтому наибольшая дальность действия обеспечивается при распространении
радиоволн над морем, что существенно для морской радионавигации.
С уменьшением проводимости почвы затухание резко увеличивается,
поэтому наибольшая дальность действия обеспечивается при распространении
радиоволн над морем, что существенно для морской радионавигации.
Влияние подстилающей поверхности
сказывается не только на Дальности действия РНС, но и на их точности, поскольку
фазовая скорость распространения радиоволн также зависит от параметров
подстилающей поверхности. Создаются специальные карты поправок фазовой
скорости в зависимости от параметров подстилающей поверхности, но поскольку
эти параметры меняются в зависимости от времени года и суток и даже погоды, то
полностью исключить погрешности местоопределения, вызванные изменением
фазовой скорости распространения радиоволн, практически невозможно. Однако их
можно существенно уменьшить оперативным введением поправок.
Влияние отражения радиоволн ионосферой. Радиоволны, достигающие приемной
антенны после отражения ионосферой, называются пространственными.
Пространственные волны могут обеспечить очень большую дальность действия, что
и используется в связных системах коротковолнового (декаметрового диапазона).
На пространственных волнах осуществляется также сверхдальнее радиолокационное
обнаружение некоторых целей (ядерных взрывов и запуска ракет) с помощью
отраженных целью сигналов, которые на трассе распространения испытывают одно
или несколько отражений от ионосферы и поверхности Земли. Явление приема таких
сигналов было открыто в 1947 г. Н.И.Кабановым и носит название эффекта
Кабанова, а РЛС, основанные на этом эффекте, называются ионосферными, или
загоризонтными. В таких станциях, работающих на волнах длиной 10... 100 м, как и в обычных РЛС, дальность цели определяется по времени запаздывания сигнала, а
направление фиксируется с помощью направленной антенны. В силу ограниченности
спектральных ресурсов декаметрового диапазона и неустойчивости характеристик
ионосферы точность таких станций невелика и не превышает 3...5 км по дальности
и 2... 3° по азимуту. Для улучшения характеристик загоризонтных РЛС используют
специальные методы и технические средства диагностики состояния ионосферы, что
позволяет выбрать оптимальную рабочую частоту и рассчитать трассу
распространения сигнала.
Зависимость высоты ионосферы от
многих причин приводит к непредсказуемым изменениям задержки сигнала, что затрудняет
использование пространственных волн для радионавигации.
Более того, интерференция
пространственных и поверхностных радиоволн ведет к искажению поверхностного
сигнала и снижает точность местоопределения. С этим явлением приходится
считаться ночью на дальностях, больших 500 км над морем и 250 км над сушей, где интенсивность пространственного сигнала становится соизмеримой и даже
превышает интенсивность
поверхностного сигнала, по
которому проводится измерение в РНС. При использовании в РНС непрерывных или
продолжительных импульсных сигналов пространственный сигнал накладывается на
поверхностный, что приводит к случайным флуктуациям амплитуды и фазы
результирующего сигнала и, следовательно, к большим погрешностям
местоопределения. Для разделения пространственных и поверхностных сигналов
используются сравнительно короткие импульсные сигналы, что, однако, вызывает
возникновение определенных проблем, которые будут обсуждаться при изучении
импульсно-фазовых РНС.
Радиоволны мириаметрового
(сверхдлинноволнового) диапазона длиной 10... 30 км, используемые в системах глобальной навигации наземного базирования, обладают некоторыми
особенностями распространения. Эти волны слабо поглощаются подстилающей
поверхностью и хорошо отражаются от нее, так же как и от ионосферы, как ночью,
так и днем. В результате сверхдлинные волны распространяются вокруг поверхности
Земли, как в волноводе, ограниченном поверхностью Земли и ионосферой, на очень
большие расстояния. При этом изменение скорости распространения и фазовые
сдвиги можно прогнозировать, что обеспечивает точность местоопределения,
достаточную для судовождения в открытом море.
В настоящее время для глобальной
навигации используются спутниковые РНС, в которых благодаря большой высоте
орбит ИСЗ обеспечивается прямая «видимость» на больших расстояниях в
дециметровом и сантиметровом диапазонах волн, которые свободно проходят через
ионосферу. Применение дециметровых и сантиметровых волн позволяет получать с
помощью спутниковых РНС очень высокую точность местоопределения в рабочей
области системы, которая охватывает все околоземное пространство.
3.5. Влияние потерь при формировании и
обработке сигналов
в РЛС на ее дальность действия
Обобщенное уравнение дальности
(3.5) включает в себя коэффициент Lп, который кроме рассмотренных выше потерь
при распространении сигнала содержит и ряд других составляющих, влияющих на
максимальную дальность действия PЛC. К ним относятся
потери в линиях, соединяющих антенну с передатчиком и приемником, потери в
антенном переключателе и антенной системе, потери при обработке сигнала в
приемнике и устройствах отображения.
Потери в линии передачи от антенны
к передатчику и приемнику определяются типом линии передачи, ее протяженностью,
наличием изгибов и сочленений. В линиях передачи волноводного типа,
используемых в очень широком диапазоне частот 0,35...40 ГГц, коэффициент
затухания  изменяется соответственно от 0,001 до 0,7 дБ/м. При
использовании одной и той же линии длиной при передаче и приеме потери
составят величину
изменяется соответственно от 0,001 до 0,7 дБ/м. При
использовании одной и той же линии длиной при передаче и приеме потери
составят величину 
Потери в антенном переключателе
могут достигать значения  а потери во вращающихся сочленениях до
а потери во вращающихся сочленениях до 
Например, для корабельной РЛС
кругового обзора десятисантиметрового диапазона с волноводной линией передачи
длиной l = 20 м результирующие потери линии достигают значения

Таким образом, потери весьма
существенны и при разработке РЛС ее высокочастотному тракту должно быть уделено
серьезное внимание.
Влияние потерь в фидерной системе
можно снизить за счет размещения дополнительного малошумящего усилителя высокой
частоты непосредственно в антенном устройстве.
Потери в антенной системе связаны в
основном формой ДНА и ее сканированием в процессе обзора, а также потерями в
обтекателе антенны (защитном колпаке).
В уравнении дальности РЛС
коэффициенты усиления антенны при излучении Gn предполагаются соответствующими направлению максимума ДНА.
При сканировании ДНА, имеющей ширину  и аппроксимируемой кривой Гаусса
и аппроксимируемой кривой Гаусса  потери на сканирование (уменьшение мощности сигнала на
краях ДНА в 2 раза) можно представить формулой
потери на сканирование (уменьшение мощности сигнала на
краях ДНА в 2 раза) можно представить формулой

где п — число интегрируемых импульсов;  — число импульсов в пачке
(предполагается нечетное число импульсов, причем центральный импульс пачки
располагается на оси ДНА). Так, например, для
— число импульсов в пачке
(предполагается нечетное число импульсов, причем центральный импульс пачки
располагается на оси ДНА). Так, например, для  потери на сканирование
потери на сканирование 
При сканировании симметричной диаграммы
(карандашного типа) по двум координатам потери удваиваются.
Потери в обтекателе антенны зависят
от его типа (применяемого материала и конструкции) и частоты, на которой
работает РЛС. В обтекателях наземных РЛС, работающих на частотах от 1 до 4 ГГц,
потери составляют  . В надувных обтекателях потери меньше,
чем в обтекателях жесткой рамной конструкции.
. В надувных обтекателях потери меньше,
чем в обтекателях жесткой рамной конструкции.
Одной из причин потерь при
обработке радиолокационных сигналов является несогласованность АЧХ приемного
тракта с формой и шириной спектра радиосигналов. Опыт показывает, что эти
потери составляют  . Потери при приеме с постоянным уровнем
ложной тревоги достигают
. Потери при приеме с постоянным уровнем
ложной тревоги достигают  , использование бинарного накопления
добавляет еще
, использование бинарного накопления
добавляет еще  (за счет ограничения амплитуды
сигналов). Потери при дискретизации и квантовании сигналов для перехода к
цифровой обработке достигают 0,5 дБ при двух выборках на импульс и снижаются
до 0,2 дБ при трех.
(за счет ограничения амплитуды
сигналов). Потери при дискретизации и квантовании сигналов для перехода к
цифровой обработке достигают 0,5 дБ при двух выборках на импульс и снижаются
до 0,2 дБ при трех.
Специфические потери, снижающие
дальность действия PJIC с селекцией движущихся целей и импульсно-допплеровских РЛС,
будут рассмотрены при изучении этих типов станций.
Таким образом, и обобщенное
уравнение дальности дает лишь приближенную оценку дальности действия РЛС, так
как невозможно априори учесть все возможные причины, влияющие на ее величину.
Поэтому важное значение при разработке РЛС имеет экспериментальная проверка ее
дальности действия в условиях, близких к реальным, с возможной настройкой
параметров входящих в нее устройств. В процессе эксплуатации РЛС предусматривается
периодическая проверка параметров РЛС, определяющих ее работоспособность и, в
частности, дальность действия, являющуюся одной из основных характеристик не
только РЛС, но и большинства систем радионавигации, радиосвязи и
радиоуправления.
3.6. Уравнение дальности при
радиолокационном наблюдении поверхностно и объемно распределенных объектов
Основное и обобщенное уравнения
радиолокации были получены в предположении обнаружения одиночной точечной
цели, имеющей ЭПР  При облучении с летательного аппарата участка подстилающей
поверхности зависит от отражающих свойств этой поверхности, параметров
РЛС и положения облучаемого участка поверхности относительно РЛС.
При облучении с летательного аппарата участка подстилающей
поверхности зависит от отражающих свойств этой поверхности, параметров
РЛС и положения облучаемого участка поверхности относительно РЛС.
В гл. 2 было показано, что ЭПР
разрешаемой площади  облучаемой поверхности с удельной ЭПР
облучаемой поверхности с удельной ЭПР  Для диффузно рассеивающей поверхности, облучаемой под углом
|3 и имеющей коэффициент отражения
Для диффузно рассеивающей поверхности, облучаемой под углом
|3 и имеющей коэффициент отражения  , удельная ЭПР
, удельная ЭПР  .
.
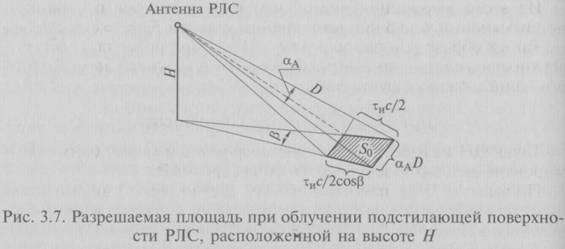
При облучении такой поверхности
зондирующим импульсом РЛС длительностью  , излучаемым антенной, расположенной на
высоте Н (рис. 3.7) и имеющей узкую ДН в горизонтальной плоскости (шириной
, излучаемым антенной, расположенной на
высоте Н (рис. 3.7) и имеющей узкую ДН в горизонтальной плоскости (шириной  ) и широкую в вертикальной (
) и широкую в вертикальной ( ), величина разрешаемой площади
), величина разрешаемой площади

В этом случае  и, следовательно,
мощность отраженного сигнала в антенне РЛС можно представить выражением
и, следовательно,
мощность отраженного сигнала в антенне РЛС можно представить выражением

где  — длина волны и мощность излучаемых антенной PJIC колебаний соответственно;
— длина волны и мощность излучаемых антенной PJIC колебаний соответственно;  — представляет собой зависимость
коэффициента направленности антенны по мощности от угла облучения
— представляет собой зависимость
коэффициента направленности антенны по мощности от угла облучения  .
.
Кубическая зависимость Рс от дальности (вместо четвертой степени
при точечной цели) объясняется тем, что при малых углах облучения (что обычно имеет место) разрешаемая площадь  , увеличивается
пропорционально D. Из формулы (3.17)
легко получить уравнение дальности для поверхностно распределенной цели в
обычной форме, справедливое при упомянутых условиях,
, увеличивается
пропорционально D. Из формулы (3.17)
легко получить уравнение дальности для поверхностно распределенной цели в
обычной форме, справедливое при упомянутых условиях,

Интересно найти форму ДНА PЛC в вертикальной плоскости , при которой Рс будет оставаться неизменной (при неизменной
Н) при изменении р одновременно с изменением D до облучаемой в данный момент площадки S0. Это особенно важно при воспроизведении
радиолокационного изображения на экране ЭПТ с яркостной модуляцией луча
индикатора панорамной PJIC для получения
одинаковой яркости по всему экрану.
Подставив в формулу 

— максимальный коэффициент
направленности антенны;  — функция, описывающая форму ДНА по напряженности поля),
получим
— функция, описывающая форму ДНА по напряженности поля),
получим

Из этого выражения видно, что Рс сохраняется постоянной при изменении
угла р при выполнении условия  .
.
Таким образом, в панорамной РЛС
обзора подстилающей поверхности желательно иметь форму ДНА в вертикальной
плоскости, описываемую функцией

Такая ДН называется
косекансквадратной и может быть сформирована антенной зеркального типа или
ФАР.
По азимуту ДНА панорамной РЛС
должна быть узкой (  малым) для получения высокого разрешения в направлении, перпендикулярном
оси ДНА (высокого углового разрешения).
малым) для получения высокого разрешения в направлении, перпендикулярном
оси ДНА (высокого углового разрешения).
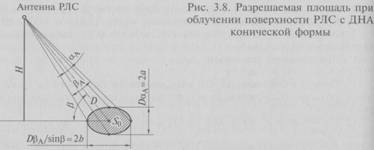
В случае облучения подстилающей
поверхности антенной РЛС, имеющей узкую ДНА в обеих плоскостях (называемую конической,
а иногда «карандашной»), ЭПР при известном коэффициенте отражения поверхности гОТ
можно вычислить по формуле  , если облучается
диффузно рассеивающая поверхность под углом облучения р (рис. 3.8).
, если облучается
диффузно рассеивающая поверхность под углом облучения р (рис. 3.8).
Полагая форму площадки, вырезаемой
ДНА на облучаемой поверхности, эллипсоидной, найдем ее величину 

При этом для РВ можно принять  , следовательно, мощность отраженного сигнала в антенне
обратно пропорциональна Н2, если используется достаточно длительный зондирующий
сигнал, при котором величина
, следовательно, мощность отраженного сигнала в антенне
обратно пропорциональна Н2, если используется достаточно длительный зондирующий
сигнал, при котором величина  определяется только шириной ДНА.
определяется только шириной ДНА.
Выражение (3.21) позволяет
определить Dmax, соответствующую
пороговому уровню отраженного сигнала Рс = Рс min.
В случае объемно распределенных
целей ЭП Р определяется разрешаемым объемом PJIC V0 и его заполнением элементарными отражателями, имеющими ЭПР
 . Возможно полное и неполное заполнение V0 элементарными отражателями. При полном заполнении
. Возможно полное и неполное заполнение V0 элементарными отражателями. При полном заполнении
объема ЭПР вычисляется по формуле:  — число элементарных отражателей на единицу объема.
— число элементарных отражателей на единицу объема.
При неполном заполнении объема ЭПР
зависит от формы и расположения заполненной части объема, а также соотношения
заполненной части и всего объема V0. Однако в любом случае ЭПР меньше  и в первом приближении может быть определена умножением
объема заполненной части на
и в первом приближении может быть определена умножением
объема заполненной части на  . При этом от степени заполнения объема V0 зависимость ЭПР от дальности рассматриваемой области
пространства меняется от квадратичной при полном заполнении до независимости
при точечной цели.
. При этом от степени заполнения объема V0 зависимость ЭПР от дальности рассматриваемой области
пространства меняется от квадратичной при полном заполнении до независимости
при точечной цели.
В практике радиолокации это
актуально при определении дальности грозовых и дождевых фронтов РЛС управления
воздушным движением и метеорологическими PЛC.
Контрольные
вопросы
1.Каким образом дальность действия
РЛС зависит от ее длины волны?
2.Как влияет отражение радиоволн от
поверхности Земли на дальность действия РЛС?
3.В чем особенность
радиолокационного обнаружения низко расположенных объектов?
4.Каковы основные причины
ослабления радиолокационных сигналов при их распространении?
5.При каких условиях рефракция
радиоволн приводит к аномальному увеличению дальности действия РЛС?
6.Определите дальность действия РЛС
трехсантиметрового диапазона, работающей в условиях дождя интенсивностью  Дальность действия РЛС в свободном пространстве
Дальность действия РЛС в свободном пространстве 
7.РЛС работает на частоте 1,35 ГГц
и имеет параболическую антенну с раскрывом диаметром dA = 8 м, совершающую при
круговом обзоре один оборот за 10 с. Определите число импульсов в пачке
отраженных импульсов на уровне половинной мощности.
8.Почему антенна самолетной
панорамной РЛС должна иметь форму ДН в вертикальной плоскости, близкую к
функции 
9.Какое влияние на  РЛС обнаружения
оказывает выбор полосы пропускания приемника?
РЛС обнаружения
оказывает выбор полосы пропускания приемника?
10.В чем заключается влияние
подстилающей поверхности на работу РНС наземного базирования?
11.Почему в системах дальней
радионавигации наземного базирования используют радиоволны длинноволнового и
сверхдлинноволнового диапазонов?
12.В чем заключаются особенности
распространения радиоволн СДВ диапазона?
13.Почему в длинноволновых РНС
наземного базирования для место- определения используется только
«поверхностная» волна?
ОБНАРУЖЕНИЕ, РАЗЛИЧЕНИЕ И ОЦЕНИВАНИЕ
ПАРАМЕТРОВ СИГНАЛОВ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
4.1. Основные теоретические сведения
Под обнаружением сигнала в РТС понимается анализ принятого
колебания y{t), завершающийся принятием решения о наличии или отсутствии в
нем полезной составляющей, которую и называют сигналом. Различение
сигналов определяют как анализ принятого колебания, завершающийся принятием
решения, какой из М сигналов, принадлежащих
заданному множеству 

Частным случаем этой задачи
является ситуация, когда принятое колебание y(t) может вообще не
содержать сигнала (один из различаемых сигналов тождественно равен нулю). В
такой постановке говорят о различении-обнаружении.
Оцениванием параметра  сигнала s(t, ) на основе анализа наблюдаемого
колебания
сигнала s(t, ) на основе анализа наблюдаемого
колебания
 оператор, определяющий характер
взаимодействия сигнала s(t, ) и помехи х(0) называется процедура формирования значения
параметра
оператор, определяющий характер
взаимодействия сигнала s(t, ) и помехи х(0) называется процедура формирования значения
параметра  , выдаваемого в качестве истинного
значения параметра , не гарантируя при этом равенства = . Сформированное значение , которое является функционалом от
наблюдаемого колебания y(t), называется оценкой
параметра .
, выдаваемого в качестве истинного
значения параметра , не гарантируя при этом равенства = . Сформированное значение , которое является функционалом от
наблюдаемого колебания y(t), называется оценкой
параметра .
При синтезе оптимальных
обнаружителей, различителей и устройств оценивания параметров сигнала
используется критерий минимального среднего риска и его частные случаи.
Применительно к задаче различения М сигналов средний риск  имеет вид
имеет вид

где  — элементы матрицы потерь;
— элементы матрицы потерь;  , — априорные вероятности гипотез (предположений о
присутствии в y(t) сигнала
, — априорные вероятности гипотез (предположений о
присутствии в y(t) сигнала  условные
вероятности ошибок,
условные
вероятности ошибок,  (принятие решения
(принятие решения  в пользу сигнала sj(t), в то время как колебание y(t) содержит сигнал si{t)).
в пользу сигнала sj(t), в то время как колебание y(t) содержит сигнал si{t)).
Для задачи обнаружения формула
(4.1) имеет вид 
где П0 и П1 —
потери, связанные с ложной тревогой и пропуском сигнала; w — априорная вероятность отсутствия
сигнала;  — условные вероятности принятия ошибочных решений, называемые
вероятностями ложной тревоги и пропуска сигнала соответственно.
— условные вероятности принятия ошибочных решений, называемые
вероятностями ложной тревоги и пропуска сигнала соответственно.
Задача проверки гипотез  при различении М сигналов или
при различении М сигналов или  при обнаружении сигнала) сводится к такому разбиению
пространства наблюдения Y на непересекающиеся области Yi при котором величина средних потерь (см. формулу (4.1))
достигает минимума. Тогда условные вероятности ошибок
при обнаружении сигнала) сводится к такому разбиению
пространства наблюдения Y на непересекающиеся области Yi при котором величина средних потерь (см. формулу (4.1))
достигает минимума. Тогда условные вероятности ошибок
Характер областей  определяется способом формирования
наблюдаемых данных. При дискретном наблюдении (цифровая обработка) Y есть n-мерное вещественное или комплексное
пространство, а
определяется способом формирования
наблюдаемых данных. При дискретном наблюдении (цифровая обработка) Y есть n-мерное вещественное или комплексное
пространство, а  есть совместная П В наблюдаемых отсчетов у1
у2, ..., у„ при справедливости
гипотезы Hi. При наблюдении реализаций колебания
есть совместная П В наблюдаемых отсчетов у1
у2, ..., у„ при справедливости
гипотезы Hi. При наблюдении реализаций колебания  есть функционал плотности наблюдаемого колебания в
предположении истинности гипотезы Hi.
есть функционал плотности наблюдаемого колебания в
предположении истинности гипотезы Hi.
С учетом введенных обозначений
минимизация (см. формулу (4.1)) приведет нас к следующему алгоритму принятия
решения: принимается решение  в пользу гипотезы Нк, если для номера к совместно выполняются
М неравенств
в пользу гипотезы Нк, если для номера к совместно выполняются
М неравенств 
В тех случаях, когда потери,
связанные с перепутыванием гипотез, одинаковы,  Решение принимается в пользу той
гипотезы Нк, для которой будет выполнена система неравенств
Решение принимается в пользу той
гипотезы Нк, для которой будет выполнена система неравенств

где  называется апостериорной вероятностью гипотезы Hi, и характеризует
всю доступную наблюдателю информацию, включая априорные сведения Р(Нi) и наблюдение у. Данный алгоритм определяет правило
максимума апостериорной плотности вероятности (МАП).
называется апостериорной вероятностью гипотезы Hi, и характеризует
всю доступную наблюдателю информацию, включая априорные сведения Р(Нi) и наблюдение у. Данный алгоритм определяет правило
максимума апостериорной плотности вероятности (МАП).
При отказе от априорной информации
о проверяемых гипотезах  критерий минимума среднего риска
превращается в критерий минимума суммы условных вероятностей ошибок
критерий минимума среднего риска
превращается в критерий минимума суммы условных вероятностей ошибок  и решение принимается в пользу той гипотезы
и решение принимается в пользу той гипотезы
Нк, которой при
принятой реализации у соответствует
наибольшее значение  . Это
выражение, рассматриваемое как функция у, является ПВ, или функционалом ПВ,
при истинности гипотезы Нк. При фиксированном наблюдении у это же выражение,
рассматриваемое как функция номера к, называется функцией правдоподобия (ФП) и
показывает, насколько правдоподобна та или иная гипотеза при данном наблюдении
у. Описанный алгоритм носит название метода максимума правдоподобия (МП).
. Это
выражение, рассматриваемое как функция у, является ПВ, или функционалом ПВ,
при истинности гипотезы Нк. При фиксированном наблюдении у это же выражение,
рассматриваемое как функция номера к, называется функцией правдоподобия (ФП) и
показывает, насколько правдоподобна та или иная гипотеза при данном наблюдении
у. Описанный алгоритм носит название метода максимума правдоподобия (МП).
Для задачи обнаружения все
перечисленные критерии, включая критерий Неймана—Пирсона, для которого
минимизируется вероятность пропуска сигнала  при условии
при условии  решение принимается на основе сравнения с порогом /п
отношения правдоподобия, т.е.
решение принимается на основе сравнения с порогом /п
отношения правдоподобия, т.е.
Для упрощения алгоритма обе части
неравенства могут быть преобразованы с помощью монотонной функции  т.е.
т.е.
Наиболее часто в этой роли
выступает логарифмическая функция. 
Для задачи оценивания параметра  сигнала s(t,
сигнала s(t,  ), аддитивно взаимодействующего с помехой x(t) и образующего в результате наблюдаемое колебание
), аддитивно взаимодействующего с помехой x(t) и образующего в результате наблюдаемое колебание  выражение для среднего
риска запишется в форме
выражение для среднего
риска запишется в форме 
где  — функция потерь, характеризующая
последствия отклонения параметра сигнала от сформированной на основе наблюдения y(t) и имеющейся априорной информации оценки
— функция потерь, характеризующая
последствия отклонения параметра сигнала от сформированной на основе наблюдения y(t) и имеющейся априорной информации оценки 
 — априорная ПВ параметра (аналог априорных вероятностей
гипотез);
— априорная ПВ параметра (аналог априорных вероятностей
гипотез);  — условная ПВ оценки параметра , являющаяся аналогом условных вероятностей ошибок в
формуле (4.1). В соответствии с теоремой умножения плотностей вероятности
— условная ПВ оценки параметра , являющаяся аналогом условных вероятностей ошибок в
формуле (4.1). В соответствии с теоремой умножения плотностей вероятности
 и учитывая, что оценка
и учитывая, что оценка  формируется путем обработки принятого
колебания y(t), формулу (4.3) можно записать в виде
формируется путем обработки принятого
колебания y(t), формулу (4.3) можно записать в виде 
где  — безусловная ПВ оценки;
— безусловная ПВ оценки;  — условная ПВ
— условная ПВ
параметра  при наблюдаемой реализации y(t), называемая апостериорной ПВ параметра . Выражение в квадратных скобках называется условным
(соответствующим колебанию y{t)) средним риском.
при наблюдаемой реализации y(t), называемая апостериорной ПВ параметра . Выражение в квадратных скобках называется условным
(соответствующим колебанию y{t)) средним риском.
Как видно из выражения (4.4),
минимизация условного среднего риска для любой реализации y(t) обеспечит минимум  . Поэтому оценки по критерию минимума
среднего риска можно находить на основе минимизации по выражения
. Поэтому оценки по критерию минимума
среднего риска можно находить на основе минимизации по выражения

Функция потерь, характеризующая
последствия отклонения оценки от истинного значения параметра  , обычно задается в виде одного из следующих трех выражений:
, обычно задается в виде одного из следующих трех выражений: 
Минимизация выражения (4.5) по  при приведенных функциях потерь дает следующие результаты:
при приведенных функциях потерь дает следующие результаты:
1) при квадратичной функции потерь
оптимальная оценка  соответствует математическому ожиданию апостериорной ПВ,
т.е.
соответствует математическому ожиданию апостериорной ПВ,
т.е.
2) при модульной функции потерь  соответствует медиане апостериорной плотности вероятности,
т.е. находится из уравнения
соответствует медиане апостериорной плотности вероятности,
т.е. находится из уравнения
3) при прямоугольной функции потерь
и  соответствует аргументу наибольшего значения
соответствует аргументу наибольшего значения  и называется оценкой
по максимуму апостериорного распределения.
и называется оценкой
по максимуму апостериорного распределения.
Апостериорная ПВ  может быть получена,
если известна совместная ПВ (функционал ПВ) принимаемой реализации y(t) и параметра
может быть получена,
если известна совместная ПВ (функционал ПВ) принимаемой реализации y(t) и параметра  . В этом случае:
. В этом случае: 
Первый сомножитель  не зависит от и может быть
не зависит от и может быть
найден, если это необходимо, с
помощью условия нормировки  . Второй
сомножитель
. Второй
сомножитель  — априорная ПВ
— априорная ПВ
параметра — должен быть задан. Третий сомножитель, рассматриваемый
как функционал от y(t), является условным
функционалом ПВ принятой реализации при фиксированном значении параметра. Если
y(t) зафиксировано
(принято), то зависимость
 от значения параметра есть ФП и характеризует степень
правдоподобности тех или иных значений параметра X при данной реализации y(t). На рис. 4.1 приведены графики сомножителей, входящих в
формулу (4.6), и результат их перемножения
от значения параметра есть ФП и характеризует степень
правдоподобности тех или иных значений параметра X при данной реализации y(t). На рис. 4.1 приведены графики сомножителей, входящих в
формулу (4.6), и результат их перемножения
— — для двух принятых
реализаций
— для двух принятых
реализаций 
Из рис. 4.1 видно, что если
априорное распределение  (рис. 4.1, в) значительно шире, чем ФП,
т.е. основная информация о значении параметра
(рис. 4.1, в) значительно шире, чем ФП,
т.е. основная информация о значении параметра  извлекается из результатов измерений, то
вид апостериорной ПВ и положение ее максимума близки к форме ФП и положению ее
максимума. Это делает оправданным
извлекается из результатов измерений, то
вид апостериорной ПВ и положение ее максимума близки к форме ФП и положению ее
максимума. Это делает оправданным
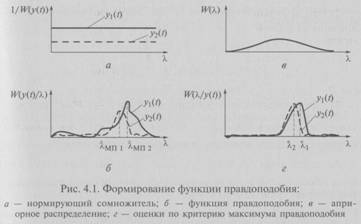
ориентацию на метод МП, при котором
в качестве оценки  выдается значение аргумента
выдается значение аргумента  соответствующее максимуму этой функции по
соответствующее максимуму этой функции по  . Таким образом,
. Таким образом,  Значения этих оценок для реализаций
Значения этих оценок для реализаций  приведены на рис. 4.1, б. Значения оценок
приведены на рис. 4.1, б. Значения оценок  соответствующих критерию МАП, показаны на рис. 4.1, г.
соответствующих критерию МАП, показаны на рис. 4.1, г.
В случае помехи в виде нормального
белого шума (НБШ) со спектральной плотностью мощности (СПМ) N0/2 и аддитивным взаимодействием с сигналом функция
правдоподобия имеет вид: для задачи проверки гипотез
В выражениях (4.7), (4.8) [0, Т] —
интервал наблюдения, охватывающий сигналы 
Подставляя формулу (4.7) в формулу
(4.2) с учетом того, что  получим после несложных преобразований алгоритм обнаружения
полностью известного сигнала s(t) на фоне НБШ с СПМ N0/2:
получим после несложных преобразований алгоритм обнаружения
полностью известного сигнала s(t) на фоне НБШ с СПМ N0/2:
условных вероятностей ошибок  и порог, с которым сравнивается корреляционный интеграл z равен половине энергии ожидаемого сигнала.
При использовании критерия Неймана—Пирсона пороговый уровень zп выбирается по заданному уровню Pл.т0.
и порог, с которым сравнивается корреляционный интеграл z равен половине энергии ожидаемого сигнала.
При использовании критерия Неймана—Пирсона пороговый уровень zп выбирается по заданному уровню Pл.т0.
Корреляционный интеграл z, характеризующий степень близости
принятой реализации y(t) и ожидаемого сигнала
s(t), может быть сформирован как отсчет на выходе фильтра,
согласованного с сигналом s(t), взятый в момент времени, соответствующий максимуму
отношения сигнал/шум на выходе фильтра. Если этот момент соответствует
окончанию интервала наблюдения [0, Т], то импульсная
характеристика такого фильтра  а комплексный коэффициент передачи
а комплексный коэффициент передачи  где ср— коэффициент, обеспечивающий размерность
(отсутствие размерности) АГсф(у'(о) и по величине равный 1. Так как
его величина не влияет на отношение сигнал/шум, то в дальнейшем он будет
опущен.
где ср— коэффициент, обеспечивающий размерность
(отсутствие размерности) АГсф(у'(о) и по величине равный 1. Так как
его величина не влияет на отношение сигнал/шум, то в дальнейшем он будет
опущен.
Сигнал на выходе СФ может быть
записан с помощью интеграла Дюамеля 
Откуда видно, что если интервал
наблюдения полностью охватывает ожидаемый сигнал, выходной сигнал СФ есть
автокорреляционная функция ожидаемого сигнала, максимум которой соответствует
времени t= Т. Этот максимум  равен энергии Е обнаруживаемого сигнала. Соответствие размерности
обеспечивает не влияющий на величину отношения сигнал/ шум коэффициент ср.
равен энергии Е обнаруживаемого сигнала. Соответствие размерности
обеспечивает не влияющий на величину отношения сигнал/ шум коэффициент ср.
Корреляционная функция помехи на
выходе СФ 
Так как в соответствии с обобщенным
равенством Парсеваля и свойствами преобразования Фурье
Если сигнал, подаваемый на
перемножитель в корреляторе, отличается от s(t) или импульсная характеристика фильтра отличается от s(T - t), но момент взятия отсчета на выходе
фильтра попрежнему t = Т, то возникают потери в отношении сигнал/ шум, которые
можно оценить следующим образом. 

сигнала s(t) и опорного колебания son(t). Таким образом, величина потерь  определяется коэффициентом взаимной корреляции
определяется коэффициентом взаимной корреляции 
Качественными показателями
обнаружителей и различителей сигналов называют значения условных вероятностей
ошибок (вероятности ложной тревоги рл.т и вероятности пропуска сигнала рп.с при обнаружении сигнала, вероятности перепутывания сигналов
 для задачи различения сигналов). Зная эти вероятности, можно
вычислить значения целевой функции длялюбого из рассмотренных выше критериев
(средний риск, сумма условных вероятностей ошибок).
для задачи различения сигналов). Зная эти вероятности, можно
вычислить значения целевой функции длялюбого из рассмотренных выше критериев
(средний риск, сумма условных вероятностей ошибок).
Для задачи обнаружения полностью
известного сигнала s(t) на фоне НБШ с СПМ N0/2: 
нормированный относительно среднего
квадратического отклонения (СКО) шума;
q — параметр обнаружения, численно равный отношению
сигнал/шум на выходе СФ.
Величина порогового уровня и
отношения сигнал/шум соответственно равны: 
Если обнаруживаемый сигнал
представляет собой группу (пачку) импульсов вида  то это должно
учитываться как в структуре обнаружителя (фильтр должен быть согласован с группой),
так и при расчете качественных показателей. При этом под
то это должно
учитываться как в структуре обнаружителя (фильтр должен быть согласован с группой),
так и при расчете качественных показателей. При этом под
энергией Е следует понимать энергию
группы 
Если сигналы, входящие в группу,
взаимноортогональны, т.е. для любой пары сигналов si,(t) и Sj(t) выполняется соотношение

энергий сигналов, входящих в
группу. В частности, для N взаимноортогональных сигналов одинаковой энергии Е0 Е = NE0 или  , что позволяет
определить требуемое число сигналов при заданных
, что позволяет
определить требуемое число сигналов при заданных 

где  — функция, обратная интегралу
вероятностей.
— функция, обратная интегралу
вероятностей.
Как уже отмечалось ранее, при
решении задачи различения М сигналов в зависимости от выбранного критерия ищется номер
сигнала, для которого:
• если различитель оптимален по
критерию минимального среднего риска, то совместно выполняются М неравенств

где r = 0, 1, ..., М - 1;
• если различитель оптимален по
критерию МАП, то совместно выполняются М неравенств

где i = 0, 1, ..., М- 1;
• если различитель оптимален по
критерию МП, то решение принимается в пользу той гипотезы Нк, для которой ФП W (y(t) Нк) будет наибольшей.
В последнем случае при различении
на фоне НБШ М сигналов, имеющих
одинаковую энергию Е, решение
принимается на основе сравнения друг с другом корреляционных интегралов

Решение принимается в пользу той
гипотезы (сигнала), которой соответствует наибольший корреляционный интеграл.
Вероятность ошибки при различении
двух сигналов s0(t) и s1(t) с одинаковыми энергиями Е составит
называемое аддитивной границей
полной вероятности ошибки.
Для задачи оценивания вектора
параметров  качественными показателями являются вектор средних значений
качественными показателями являются вектор средних значений
 и корреляционная матрица К, диагональные элементы которой
определяют дисперсии оценки компонентов
и корреляционная матрица К, диагональные элементы которой
определяют дисперсии оценки компонентов
вектора параметров  а внедиагональные элементы — корреляционные связи между
оценками компонент.
а внедиагональные элементы — корреляционные связи между
оценками компонент.
Оценки по методу МП (ОМП)
асимптотически несмещенные, асимптотически совместно эффективные и нормальные с
корреляционной матрицей 
— матрица, обратная информационной
матрице Фишера Ф, элементы которой

Предполагается, что логарифм ФП
дважды дифференцируем по параметру. Это надо иметь в виду при определении
точности измерения параметров конкретных сигналов. 
При измерении неэнергетических
параметров, для которых  т.е. ОМП соответствует максимуму
корреляционного интеграла
т.е. ОМП соответствует максимуму
корреляционного интеграла  рассматриваемому при фиксированной
реализации у(t) как функция
рассматриваемому при фиксированной
реализации у(t) как функция  . В этом случае второе слагаемое в выражении для Фik равно нулю
. В этом случае второе слагаемое в выражении для Фik равно нулю  и после несложных преобразований получим
и после несложных преобразований получим
Функция неопределенности сигнала  по параметру
по параметру  . характеризует меру линейной связи
(коэффициент корреляции) двух копий сигнала, имеющих различные значения
параметра
. характеризует меру линейной связи
(коэффициент корреляции) двух копий сигнала, имеющих различные значения
параметра  .
.
Для ФН стационарного типа,
зависящей от разности  , можно положить
, можно положить  и определить ее как
и определить ее как
и для дисперсии МП оценки
единственного неэнергетического параметра сигнала (фаза, частота для
узкополосного сигнала; временной сдвиг, если сигнал не выходит за пределы
интервала наблюдения  можно записать
можно записать

Ранее речь шла об обнаружении и
различении полностью известных сигналов, а в задаче оценивания параметров оценке
подлежали все неизвестные параметры. В тех случаях, когда сигналы содержат
параметры  не интересующие наблюдателя и которые можно рассматривать
как случайные величины с ПВ
не интересующие наблюдателя и которые можно рассматривать
как случайные величины с ПВ  входящие в рассмотренные выше алгоритмы
ФП
входящие в рассмотренные выше алгоритмы
ФП
 для задачи
обнаружения и различения и
для задачи
обнаружения и различения и  для
задачи оценивания должны быть усреднены по всем значениям неинформационного
параметра
для
задачи оценивания должны быть усреднены по всем значениям неинформационного
параметра 
Для случая, когда единственным
неинформационным параметром является случайная начальная фаза сигнала ф,
равномерно распределенная в интервале  мы приходим к следующим результатам.
Оптимальным правилом обнаружения радиосигнала
мы приходим к следующим результатам.
Оптимальным правилом обнаружения радиосигнала

будет сравнение с порогом zo, зависящим от выбранного критерия
оптимальности, статистики
 Корреляционные
интегралы
Корреляционные
интегралы  равны
равны

где  — полностью известная огибающая, центральная частота и
закон угловой модуляции соответственно;
— полностью известная огибающая, центральная частота и
закон угловой модуляции соответственно;  — упомянутая ранее
случайная начальная фаза.
— упомянутая ранее
случайная начальная фаза.
Способы реализации алгоритма
рассмотрены в [8, 9]. Вероятность ложной тревоги равна
 нормированный относительно СКО шума на выходе СФ порог,
нормированный относительно СКО шума на выходе СФ порог, 
Вероятность правильного обнаружения
сигнала может быть определена в виде

где q — отношение сигнал/шум на выходе СФ; Q — табулированная Q-функция Маркума,
определяемая выражением
Из приведенных выражений можно
определить пороговое отношение сигнал/шум qmin, обеспечивающее обнаружение сигнала с требуемыми
вероятностями 

где  — функция, обратная Q-функции по второму аргументу. При
обнаружении когерентного пакета (группы) импульсов
— функция, обратная Q-функции по второму аргументу. При
обнаружении когерентного пакета (группы) импульсов

со случайной начальной фазой ср,
равномерно распределенной в интервале  при определении параметра обнаружения
при определении параметра обнаружения
(где  — независимые между собой, равномерно распределенные в
интервале
— независимые между собой, равномерно распределенные в
интервале  случайные начальные фазы) оптимальный алгоритм усложняется
и состоит в сравнении с порогом
случайные начальные фазы) оптимальный алгоритм усложняется
и состоит в сравнении с порогом  решающей статистики
решающей статистики  . Порог выбирается в зависимости от используемого
критерия.
. Порог выбирается в зависимости от используемого
критерия.
Определение качественных
показателей  в общем случае достаточно сложно. Однако в случае
обнаружения пакета слабых сигналов, когда
в общем случае достаточно сложно. Однако в случае
обнаружения пакета слабых сигналов, когда  и при условии высокой вероятности
и при условии высокой вероятности  с достаточно малы) необходимо обрабатывать большое число
импульсов N и в соответствии с
центральной предельной теоремой распределение решающей статистики
с достаточно малы) необходимо обрабатывать большое число
импульсов N и в соответствии с
центральной предельной теоремой распределение решающей статистики  , можно считать
близким к нормальному закону. При этих допущениях для пачки одинаковых
импульсов
, можно считать
близким к нормальному закону. При этих допущениях для пачки одинаковых
импульсов

где  — центрированный нормированный порог;
— центрированный нормированный порог;  — отношение сигнал/шум на выходе детектора огибающей.
Величина порога определяется выражением
— отношение сигнал/шум на выходе детектора огибающей.
Величина порога определяется выражением
где  — соответственно среднее значение и
дисперсия отсчета на выходе квадратичного детектора, включенного после
фильтра, согласованного с одиночным импульсом, при отсутствии сигнала.
— соответственно среднее значение и
дисперсия отсчета на выходе квадратичного детектора, включенного после
фильтра, согласованного с одиночным импульсом, при отсутствии сигнала.
Отношение сигнал/шум на выходе
детектора можно записать в виде
где  — среднее значение отсчета на выходе
детектора при наличии сигнала.
— среднее значение отсчета на выходе
детектора при наличии сигнала.
Приведенные соотношения позволяют
оценить потери при обнаружении некогерентного пакета слабых  сигналов по сравнению с когерентным пакетом, имеющим для
одиночных сигналов такое же отношение сигнал/шум
сигналов по сравнению с когерентным пакетом, имеющим для
одиночных сигналов такое же отношение сигнал/шум  . Эти потери можно
выразить в необходимом увеличении числа импульсов для некогерентного пакета Nнк по сравнению с числом импульсов для
когерентного пакета Nk при одинаковых
вероятностях
. Эти потери можно
выразить в необходимом увеличении числа импульсов для некогерентного пакета Nнк по сравнению с числом импульсов для
когерентного пакета Nk при одинаковых
вероятностях 
Если учесть, что для слабых
сигналов  имеет место эффект подавления, проявляющийся в том,
что
имеет место эффект подавления, проявляющийся в том,
что  то
то

При обнаружении сигнала,
содержащего два неинформационных параметра, случайную начальную фазу ф,
распределенную, как и раньше, равномерно в интервале  и случайную амплитуду А, подчиняющуюся распределению W(А), оптимальный
алгоритм не зависит от W(А) и совпадает с алгоритмом обнаружения
сигнала со случайной начальной фазой и известной амплитудой. Случайные
величины
и случайную амплитуду А, подчиняющуюся распределению W(А), оптимальный
алгоритм не зависит от W(А) и совпадает с алгоритмом обнаружения
сигнала со случайной начальной фазой и известной амплитудой. Случайные
величины  и А считаются
независимыми.
и А считаются
независимыми.
Если флуктуации амплитуды А подчиняются закону Рэлея 
то качественные показатели  соответственно получим:
соответственно получим: 
где пороговый уровень h и отношение
сигнал/шум q определяются
выражениями: 
При этом средняя энергия сигнала Е связана с энергией сигнала Е0 при А = 1 соотношением  .
.
Средний квадрат амплитуды равен
При различении равновероятных
сигналов энергии Е со случайными,
независимыми и равномерно распределенными в интервале  начальными фазами оптимальный алгоритм состоит в сравнении
между собой статистик Zi определяющих алгоритм обнаружения сигнала со случайной
начальной фазой. Решение принимается в пользу того сигнала, для которого эта
статистика окажется наибольшей.
начальными фазами оптимальный алгоритм состоит в сравнении
между собой статистик Zi определяющих алгоритм обнаружения сигнала со случайной
начальной фазой. Решение принимается в пользу того сигнала, для которого эта
статистика окажется наибольшей.
Для ансамбля М сигналов, ортогональных в усиленном смысле
(при любых значениях начальных фаз) и образующих для данной модели оптимальную
совокупность сигналов, может быть записана оценка для вероятности ошибки

Посмотрим, как изменятся
результаты, связанные с оценкой параметров сигнала, при наличии у сигнала
случайной равномерно распределенной в интервале  начальной фазы. Усредненная по
начальной фазы. Усредненная по  функция правдоподобия параметра
функция правдоподобия параметра  .
.

2. Совместная оценка амплитуды А и фазы  . Совместная оценка амплитуды А и фазы
. Совместная оценка амплитуды А и фазы  сигнала
сигнала 
 — полностью известная огибающая, центральная частота и закон
угловой модуляции соответственно.
— полностью известная огибающая, центральная частота и закон
угловой модуляции соответственно.
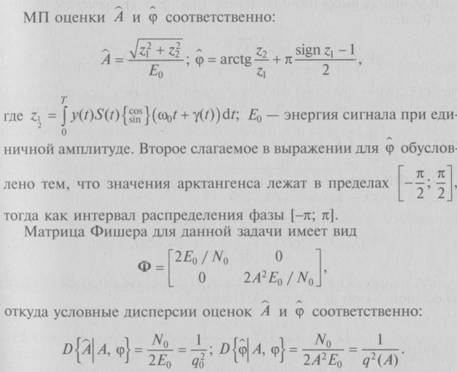
Таким образом, дисперсия оценки
амплитуды определяется отношением сигнал/шум на выходе СФ для сигнала с
единичной амплитудой, а дисперсия оценки фазы — фактическим отношением
сигнал/шум. Оценки  некоррелированы, а в силу асимптотической нормальности и
независимы.
некоррелированы, а в силу асимптотической нормальности и
независимы.
3. Оценка времени запаздывания
сигнала. Время запаздывания  является единственным информационным параметром сигнала
является единственным информационным параметром сигнала 
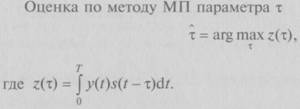
Эту оценку можно получить, фиксируя
положение наибольшего значения на выходе фильтра, согласованного с сигналом s(t), с учетом постоянной поправки  , равной длительности сигнала, т.е.
, равной длительности сигнала, т.е. 
Пользуясь выражениями (4.9) и
(4.10), можно получить выражения для дисперсии ОМП параметра т при известных
остальных параметрах сигнала: 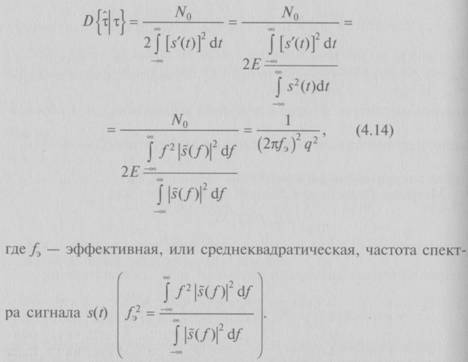
В формуле (4.14) второе выражение
для  показывает, что точность измерения временного положения
сигнала зависит от отношения сигнал/шум на выходе СФ и энергии производной
сигнала s'(t), отнесенной к энергии сигнала, т.е. для быстроизменяющихся сигналов
точность измерения при одних и тех же значениях q будет выше. Третье и четвертое выражения в формуле (4.14)
позволяют связать точность измерения времени запаздывания т с параметром
спектра
показывает, что точность измерения временного положения
сигнала зависит от отношения сигнал/шум на выходе СФ и энергии производной
сигнала s'(t), отнесенной к энергии сигнала, т.е. для быстроизменяющихся сигналов
точность измерения при одних и тех же значениях q будет выше. Третье и четвертое выражения в формуле (4.14)
позволяют связать точность измерения времени запаздывания т с параметром
спектра  , который характеризует ширину спектра сигнала и его положение
на оси частот. Соотношение для
, который характеризует ширину спектра сигнала и его положение
на оси частот. Соотношение для  можно записать в форме
можно записать в форме 
— центральная частота спектра
сигнала, равная нулю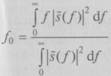 для видеосигнала и радиосигналов
для видеосигнала и радиосигналов
 и выражение для дисперсии оценки временного положения
сигнала принимает вид
и выражение для дисперсии оценки временного положения
сигнала принимает вид
Учитывая, что для узкополосного
радиосигнала спектр комплексной огибающей есть удвоенная часть спектра,
расположенного вокруг центральной частоты f0, смещенная в начало координат, можно
утверждать, что точность ОМП запаздывания сигнала со случайной фазой можно
повысить, не прибегая к увеличению энергии сигнала, так как расширение спектра
также уменьшает условную дисперсию ОМП. Тривиальным способом увеличения F3 является укорочение сигнала, т.е.
уменьшение его длительности  . При этом для сохранения постоянства
энергии, т.е. значения q, необходимо
одновременно поднимать пиковую мощность сигнала, что на практике не всегда
возможно в силу ограниченности мощности передатчиков. Однако спектр сигнала
можно расширить и при фиксированной длительности
. При этом для сохранения постоянства
энергии, т.е. значения q, необходимо
одновременно поднимать пиковую мощность сигнала, что на практике не всегда
возможно в силу ограниченности мощности передатчиков. Однако спектр сигнала
можно расширить и при фиксированной длительности  . Для этого требуется только осуществить соответствующую
модуляцию сигнала в пределах длительности При правильно выбранном законе модуляции
ширина спектра F3 определяется параметрами этого закона, а не длительностью . При этом выполняется соотношение
. Для этого требуется только осуществить соответствующую
модуляцию сигнала в пределах длительности При правильно выбранном законе модуляции
ширина спектра F3 определяется параметрами этого закона, а не длительностью . При этом выполняется соотношение  Сигналы, удовлетворяющие этому неравенству, называются сложными
(широкополосными, шумоподобными) в отличие от простых, для которых база
(произведение
Сигналы, удовлетворяющие этому неравенству, называются сложными
(широкополосными, шумоподобными) в отличие от простых, для которых база
(произведение  близка к единице.
близка к единице.
Механизм роста потенциальной
точности оценки т с расширением спектра сигнала состоит в следующем: с ростом F3 огибающая сигнала после СФ «обостряется»
и ее пик флуктуирует по времени под воздействием шума того же уровня в меньших
пределах. Обратим внимание на то, что точность оценки  сигнала со случайной начальной фазой не зависит от номинала
f0, поскольку за ОМП принимают временное положение максимума
огибающей "радиосигнала (а не его высокочастотного заполнения) на выходе
СФ.
сигнала со случайной начальной фазой не зависит от номинала
f0, поскольку за ОМП принимают временное положение максимума
огибающей "радиосигнала (а не его высокочастотного заполнения) на выходе
СФ.
4. Оценка частоты. При оценивании допплеровского сдвига частоты
Fдля сигнала со случайной начальной фазой
Физика роста точности ОМП  с увеличением Тэ очевидна: оценить отличие частоты от
номинального значения можно по набегу фазы
с увеличением Тэ очевидна: оценить отличие частоты от
номинального значения можно по набегу фазы  несущей наблюдаемого колебания
относительногармонической опоры частоты f0. За эффективную длительность сигнала значение набега фазы
составит
несущей наблюдаемого колебания
относительногармонической опоры частоты f0. За эффективную длительность сигнала значение набега фазы
составит  , и поэтому оценить F можно делением ОМП значения
, и поэтому оценить F можно делением ОМП значения  в силу инвариантности ОМП относительно замены переменных.
Так как дисперсия
в силу инвариантности ОМП относительно замены переменных.
Так как дисперсия  имеет порядок
имеет порядок  , то дисперсия
, то дисперсия  оказывается равной правой части выражения (4.16).
оказывается равной правой части выражения (4.16).
Из приведенных рассуждений
оказывается понятным, почему и для полностью известного сигнала (за исключением
оцениваемого частотного сдвига F) в соответствии с выражением (4.10)
мы получили бы аналогичное
выражение для  . Ведь измерение частоты связано с оценкой
. Ведь измерение частоты связано с оценкой  , которая определяется как разность фаз в конце и начале сигнала
с учетом
, которая определяется как разность фаз в конце и начале сигнала
с учетом  за счет известной центральной частоты f0. При этом случайная, но постоянная за
время Тэ, фаза
за счет известной центральной частоты f0. При этом случайная, но постоянная за
время Тэ, фаза  исключается.
исключается.
Интересно отметить дуальность
временных и спектральных характеристик при изменениях  и F. Если при q = const точность оценки времени запаздывания
определяется шириной спектра, т.е. «протяженностью» сигнала в частотной
области, то дисперсия ОМП частоты зависит только от протяженности сигнала во
временной области. Если при оценивании или F производится N независимых измерений в одинаковых
условиях, то величина дисперсии оценки уменьшается в N раз.
и F. Если при q = const точность оценки времени запаздывания
определяется шириной спектра, т.е. «протяженностью» сигнала в частотной
области, то дисперсия ОМП частоты зависит только от протяженности сигнала во
временной области. Если при оценивании или F производится N независимых измерений в одинаковых
условиях, то величина дисперсии оценки уменьшается в N раз.
угловой модуляции сигнала.
Таким образом, условные дисперсии
совместных ОМП и F в асимптотическом приближении соответственно:
Так как матрица Ф-1 является корреляционной матрицей асимптотически совместно
нормальных ОМП  , то из выражения (4.16) следует, что коэффициент
, то из выражения (4.16) следует, что коэффициент
частотно-временной связи есть не
что иное, как коэффициент корреляции случайных величин при  . Кроме того, результаты выражений (4.18) и (4.19)
показывают, что при прочих равных условиях точность совместной оценки
. Кроме того, результаты выражений (4.18) и (4.19)
показывают, что при прочих равных условиях точность совместной оценки  выше в том случае, когда
выше в том случае, когда
 не коррелированы. При этом выражения (4.18) и
(4.15), как и выражения (4.19) и (4.16), совпадают, откуда следует, что при
отсутствии частотно-временной связи точность ОМП одного из параметров
не коррелированы. При этом выражения (4.18) и
(4.15), как и выражения (4.19) и (4.16), совпадают, откуда следует, что при
отсутствии частотно-временной связи точность ОМП одного из параметров  не зависит от того,
известен ли другой или оценивается наряду с первым. Подчеркнем, что для любых
сигналов без ЧМ, а также для сигналов с симметричной ЧМ
не зависит от того,
известен ли другой или оценивается наряду с первым. Подчеркнем, что для любых
сигналов без ЧМ, а также для сигналов с симметричной ЧМ  Для сигналов названных типов дисперсии ОМП
Для сигналов названных типов дисперсии ОМП  и F при совместных и раздельных измерениях времени запаздывания
и частоты одинаковы. При этом ФН
и F при совместных и раздельных измерениях времени запаздывания
и частоты одинаковы. При этом ФН

называют частотно-временной. Само
название «функция неопределенности», введенное
Ф. Вудвордом, первоначально было закреплено
за функцией (4.20) и лишь впоследствии по мере разработки общей теории оценок
распространено на параметры любой природы. Очевидно, геометрически ФН (см.
формулу (4.20)) описывает некую поверхность над плоскостью  причем ее максимум, равный единице, находится в точке
причем ее максимум, равный единице, находится в точке 

Чтобы лучше понять смысл требований
к ФН, вытекающих из стремления к высокой точности оценок  обратимся к схеме измерителя времени запаздывания и частоты,
изображенной на рис. 4.2 в соответствии с существом метода МП.
обратимся к схеме измерителя времени запаздывания и частоты,
изображенной на рис. 4.2 в соответствии с существом метода МП.
Схема состоит из набора фильтров СФк, согласованных с сигналами 
 — частотная расстройка каналов, причем полоса частот
— частотная расстройка каналов, причем полоса частот
 охватывает все возможные значения
оцениваемой частоты F. Выходные сигналы СФ поступают на
детекторы огибающей, после
охватывает все возможные значения
оцениваемой частоты F. Выходные сигналы СФ поступают на
детекторы огибающей, после

чего в решающем блоке определяется
номер канала  , в котором огибающая достигла наибольшего значения, и
фиксируется временное положение этого максимума т с поправкой на длительность
сигнала
, в котором огибающая достигла наибольшего значения, и
фиксируется временное положение этого максимума т с поправкой на длительность
сигнала  . Оценка частотного сдвига
. Оценка частотного сдвига  . Число каналов М выбирается из условий требуемой точности
замены непрерывной оценки F дискретной.
. Число каналов М выбирается из условий требуемой точности
замены непрерывной оценки F дискретной.
Пусть на вход этой схемы подан
сигнал с нулевыми значениями времени запаздывания и частотной расстройки.
Тогда при отсутствии шума на входе измерителя выходной сигнал детектора
огибающей с линейной характеристикой для i-го канала в момент времени  получим
получим

Таким образом, огибающая после i-го СФ воспроизводит
по форме  как функцию х при фиксированной расстройке Fi. Поскольку Fi меняется от канала к каналу, рассматриваемые в совокупности
выходы всех детекторов схемы (см. рис. 4.1) одновременно воспроизводят все
сечения ФН (см. формулу (4.20)) плоскостями
как функцию х при фиксированной расстройке Fi. Поскольку Fi меняется от канала к каналу, рассматриваемые в совокупности
выходы всех детекторов схемы (см. рис. 4.1) одновременно воспроизводят все
сечения ФН (см. формулу (4.20)) плоскостями  . В идеале частотная расстройка между соседними каналами
должна быть бесконечно малой. Тогда выходы всех детекторов в точности
воспроизвели бы ФН, если одну координату
. В идеале частотная расстройка между соседними каналами
должна быть бесконечно малой. Тогда выходы всех детекторов в точности
воспроизвели бы ФН, если одну координату  рассматривать как реальное время t (с вычитанием
рассматривать как реальное время t (с вычитанием  ), а другую F — как частотную расстройку СФ от номинала fо.
), а другую F — как частотную расстройку СФ от номинала fо.
Следовательно, для достижения
высокой точности совместного измерения  необходимо иметь достаточно острый пик ФН
в точке
необходимо иметь достаточно острый пик ФН
в точке  . Действительно, появление шума на входе системы приведет к
искажению воспроизводимой ею поверхности по сравнению с ФН
. Действительно, появление шума на входе системы приведет к
искажению воспроизводимой ею поверхности по сравнению с ФН  ) и, как следствие, к
отклонениям
) и, как следствие, к
отклонениям
координат ее максимума  от значений
от значений  . При одном
. При одном
и том же довольно слабом шуме колебания
поверхности по вертикали вызовут тем меньшие флуктуации координат максимума,
чем острее пик ФН в точке  . Следует отметить, что наличие у ФН
побочных максимумов (боковых лепестков) увеличивает риск аномальных ошибок.
Если у ФН есть побочные боковые лепестки, их «легче» поднять до уровня главного
(расположенного в точке
. Следует отметить, что наличие у ФН
побочных максимумов (боковых лепестков) увеличивает риск аномальных ошибок.
Если у ФН есть побочные боковые лепестки, их «легче» поднять до уровня главного
(расположенного в точке  так как для этого потребуются шумовые
выбросы меньшей интенсивности, чем при равенстве ФН нулю вне пределов зоны
главного максимума.
так как для этого потребуются шумовые
выбросы меньшей интенсивности, чем при равенстве ФН нулю вне пределов зоны
главного максимума.
Сформулированные требования к виду
ФН аналогичны требованиям, которые будут изложены в подразд. 4.3 при изучении
разрешающей способности PJIC.
4.2. Потенциальная точность измерения
угловых координат
Характеристики потенциальной
точности измерения угловых координат при больших отношениях сигнал/шум
получаются с использованием границ Крамера—Рао и зависят как от излучаемых
сигналов, так и от параметров антенной системы. Рассмотрим для примера
потенциальную точность оценки угловой координаты методом пеленгации, при
котором отсчет угловой координаты происходит в момент времени когда
интенсивность принимаемых колебаний достигает максимального значения. Будем
считать, что излучаемый сигнал имеет вид

где fн — несущая частота;  — комплексная огибающая одиночного сигнала; Тп — период повторения. При этом выполняется условие
— комплексная огибающая одиночного сигнала; Тп — период повторения. При этом выполняется условие

где L — линейная протяженность антенны по направлению, соответствующему
измеряемому углу;  — ширина спектра сигнала;
— ширина спектра сигнала;  — длина волны, соответствующая
— длина волны, соответствующая 
Выполнение этого условия позволяет
считать диаграмму направленности антенны для сигнала, определенного по формуле
(4.21), совпадающей с ДН для монохроматического сигнала с частотой fн.
Тогда отраженный от цели сигнал
получим в виде

В выражении (4.22) А и  — несущественные параметры, характеризующие соответственно
интенсивность сигнала и начальную фазу, которые считаются независимыми
случайными величинами, причем распределена равномерно в интервале
— несущественные параметры, характеризующие соответственно
интенсивность сигнала и начальную фазу, которые считаются независимыми
случайными величинами, причем распределена равномерно в интервале 
Подлежащая оцениванию угловая
координата цели 
 момент времени, в который максимум ДН
момент времени, в который максимум ДН  направлен на цель, а
направлен на цель, а  - угловая скорость сканирования ДН.
- угловая скорость сканирования ДН.
При выполнении условия  — временная протяженность огибающей пачки импульсов, образующейся
при сканировании ДН, функция неопределенности по параметрам
— временная протяженность огибающей пачки импульсов, образующейся
при сканировании ДН, функция неопределенности по параметрам
 и F примет вид
и F примет вид
Из выражения (4.23) можно
заключить, что потенциальная точность и разрешающая способность по угловым
координатам определяются корреляционной функцией ДН 
Так как  является неэнергетическим параметром, то в соответствии с
формулой (4.13) дисперсия оценки угла
является неэнергетическим параметром, то в соответствии с
формулой (4.13) дисперсия оценки угла
а разрешающая способность по
угловой координате будет определяться шириной главного лепестка, а также
уровнем побочных лепестков функции  . Если ДН описывается кривой Гаусса
. Если ДН описывается кривой Гаусса
Если выразить ширину ДН через
относительный раскрыв антенны  , то выражение (4.24) примет вид
, то выражение (4.24) примет вид
Входящее в выражение (4.24)
отношение сигнал/шум вычисляется с учетом числа импульсов, образующих пачку
при сканировании ДН, и может быть записано в форме  число импульсов в
пачке; q0 — отношение
сигнал/шум для наибольшего по амплитуде из импульсов пачки; кд— коэффициент, определяемый формой ДН.
число импульсов в
пачке; q0 — отношение
сигнал/шум для наибольшего по амплитуде из импульсов пачки; кд— коэффициент, определяемый формой ДН.
Ранее была рассмотрена модель
когерентного сигнала со слу-1 чайной начальной фазой (см. формулу (4.22)). Для
некогерентной последовательности, как и в задаче обнаружения, выделяют два
крайних случая:  . В первом случае эффективность обработки
практически не отличается от рассмотренного ранее (для
. В первом случае эффективность обработки
практически не отличается от рассмотренного ранее (для
когерентного сигнала) и  . Во втором.случае с учетом эффекта подавления слабых
сигналов при детектировании
. Во втором.случае с учетом эффекта подавления слабых
сигналов при детектировании  . Коэффициенты
. Коэффициенты  близки к единице и определяются формой ДН, а также методикой
оценки ширины ДН
близки к единице и определяются формой ДН, а также методикой
оценки ширины ДН  Предполагается выполнение условий
Предполагается выполнение условий 
В радиолокационных системах широко
используются антенные решетки, позволяющие за счет управления ДН решать целый
ряд важнейших задач (разрешение целей, подавление активных помех). Для
измерения одной угловой координаты может быть использована эквидистантная
линейная антенная решетка.
Эквидистантность решетки обозначает
неизменность расстояния b между элементами решетки. Если принимаемый сигнал по отношению
к оцениваемой угловой координате  может быть представлен в виде
может быть представлен в виде  что допускает разделение пространственной и временной
обработок, то для дисперсии оценки углового положения цели
что допускает разделение пространственной и временной
обработок, то для дисперсии оценки углового положения цели  (угла между фронтом волны и линией расположения элементов
решетки) можно записать*
(угла между фронтом волны и линией расположения элементов
решетки) можно записать*
где q2 — отношение сигнал/шум по мощности, соответствующее
когерентной обработке N импульсов,  — отношение сигнал/шум для одиночного сигнала); М — число элементов антенной решетки; b — расстояние между
элементами решетки;
— отношение сигнал/шум для одиночного сигнала); М — число элементов антенной решетки; b — расстояние между
элементами решетки;  —длина волны;
—длина волны;  — значение измеряемого угла.
— значение измеряемого угла.
При монохроматическом сигнале 
где Um — амплитуда сигнала на входе; Т — время наблюдения (накопления); N0/2 — пересчитанная ко входу СПМ типа «белый шум».
4.3. Разрешающая способность РЛС
Разрешающей способностью (разрешающей силой) называется способность приборов
различать близкие в пространстве, времени или по физическим свойствам объекты
или процессы. Это понятие, изначально введенное Дж. Рэлеем применительно к
оптическим приборам, продолжает широко использоваться в оптике, радиоастрономии,
радиотехнических приложениях.
С точки зрения теории радиосистем
задача разрешения сводится к возможности раздельного наблюдения и обработки
сигналов, отличающихся друг от друга значением параметра  в состав которого могут входить, например, время
запаздывания, сдвиг по частоте, направление прихода, поляризация. Переформулируя
классическое детерминистическое определение применительно к радиотехнике, получим
следующее: разрешающая способность радиоэлектронного прибора есть способность
давать такой суммарный отклик на суперпозицию двух отличающихся значениями
параметра
в состав которого могут входить, например, время
запаздывания, сдвиг по частоте, направление прихода, поляризация. Переформулируя
классическое детерминистическое определение применительно к радиотехнике, получим
следующее: разрешающая способность радиоэлектронного прибора есть способность
давать такой суммарный отклик на суперпозицию двух отличающихся значениями
параметра  сигналов, в котором просматриваются два максимума,
соответствующие отдельным сигналам. Мерой разрешающей способности при этом
может служить минимальная разница значений накладывающихся сигналов, при которой указанные
два максимума еще не воспринимаются как один.
сигналов, в котором просматриваются два максимума,
соответствующие отдельным сигналам. Мерой разрешающей способности при этом
может служить минимальная разница значений накладывающихся сигналов, при которой указанные
два максимума еще не воспринимаются как один.
Однако характерным для радиосистем
извлечения и обработки информации является наблюдение сигналов на фоне шумов.
Учитывая, что основным методом описания помех являются вероятностные законы,
весьма конструктивным оказывается статистический подход к решению задачи
разрешения сигналов. Конкретизируя понятия «извлечение информации», «обработка
сигнала», можно видеть, что задача разрешения представляется в виде решаемых
отдельно или совместно процедур различения, измерения параметров, обнаружения
сигналов.
Статистическая интерпретация
разрешения по параметру позволяет определить его как обнаружение,
различение либо измерение параметров полезного сигнала в условиях совокупного
мешающего воздействия флуктуационных шумов и помех в виде суперпозиции копий
полезного сигнала, отличающихся от последнего значениями . Термин «разрешающая способность» при этом °значает
способность к выполнению соответствующей функции (обнаружения, различения,
измерения параметров) в присутствии помех названной природы. Статистическое
толкование разрешающей способности учитывает конечные цели обработки наблюдений
в РТС и является более содержательным, чем заимствованное из классической
оптики детерминистическое.
Несмотря на принципиальные различия
статистического и детерминистического подходов к проблеме разрешения практические
выводы, получаемые на их основе, нередко совпадают. Многочисленные примеры
свидетельствуют о том, что качество разрешения находится в сильной зависимости
от одной и той же характеристики сигнала — функции неопределенности по параметру
, которая была введена ранее: 
где , и м —
значения параметра информационного и мешающего сигналов соответственно; S(t, ,) — комплексная огибающая.
При стационарной ФН можно положить  будет характеризовать качество разрешения двух сигналов,
значения неэнергетического параметра которых отличаются на .
будет характеризовать качество разрешения двух сигналов,
значения неэнергетического параметра которых отличаются на .
Основной вывод, к которому приводит
анализ рассматриваемой задачи, состоит в том, что показатели различения
сигналов по параметру . тем выше, чем ниже уровень  при упоминавшемся ранее ограничении
при упоминавшемся ранее ограничении  .
.
Остановимся на важнейших частных
случаях.
Разрешение по времени запаздывания.
Пусть скалярным параметром, по
которому необходимо разрешать сигналы, служит время запаздывания. Качество
разрешения 
Следовательно, две копии сигнала,
отличающиеся временем запаздывания на т, разрешаются тем успешнее, чем меньше
уровень корреляционной функции комплексной огибающей при данном  .
.
В качестве меры разрешающей
способности по т можно принять то минимальное расхождение min времен запаздывания двух копий сигнала, начиная с которого
последние разрешаются удовлетворительно, причем в рамках статистического
подхода требуемое качество разрешения понимается в смысле соответствия тех или
иных статистических показателей (вероятностей ошибок при разрешении
—обнаружении, дисперсий оценок при разрешении — измерении) предъявленным
требованиям. Чем меньше min, тем более высокой
следует признать разрешающую способность по времени запаздывания. Таким
образом, чем более сконцентрирована корреляционная функция в окрестности = 0, тем выше разрешающая способность, т.е.
хорошо разрешаются по времени запаздывания лишь сигналы, обладающие достаточно
«короткими» корреляционными функциями. При этом следует отметить, что полная
длительность автокорреляционной функции сигнала протяженности с равна 2с. Таким образом, речь идет о длительности
главного (центрального) пика ФН по при условии достижения функцией  пренебрежимо малого уровня за пределами этого пика.
пренебрежимо малого уровня за пределами этого пика.
Достигнуть того, чтобы длительность
ФН или, что эквивалентно, длительность  к
корреляционной функции комплексной огибающей была меньше min, можно простым способом: взять любой импульсный сигнал,
длительность которого
к
корреляционной функции комплексной огибающей была меньше min, можно простым способом: взять любой импульсный сигнал,
длительность которого  Однако при уменьшении длительности с сигнала без изменения
Однако при уменьшении длительности с сигнала без изменения
его мощности Pc(t) уменьшается и энергия  от отношения которой к СПМ белого шума
зависят статистические характеристики соответствующих процедур извлечения
информации. Следовательно, чтобы уменьшение энергии Е не снижало положительного эффекта
укорочения ФН, нужно, уменьшая с,
пропорционально увеличивать мощность сигнала Pc(t). Возможности такого увеличения на практике
далеко не беспредельны.
от отношения которой к СПМ белого шума
зависят статистические характеристики соответствующих процедур извлечения
информации. Следовательно, чтобы уменьшение энергии Е не снижало положительного эффекта
укорочения ФН, нужно, уменьшая с,
пропорционально увеличивать мощность сигнала Pc(t). Возможности такого увеличения на практике
далеко не беспредельны.
Перечисленные причины побуждают к
поискам таких сигналов, которые позволяли бы иметь хорошее качество разрешения
по времени запаздывания при больших собственных длительностях  т.е. обладали бы
корреляционной функцией комплексной огибающей, более узкой, чем сам сигнал:
т.е. обладали бы
корреляционной функцией комплексной огибающей, более узкой, чем сам сигнал:  . Если сигнал с таким свойством поступает на согласованный с
ним Фильтр, то длительность основной части реакции последнего (главный
лепесток) оказывается значительно меньше с,
т.е. происходит сжатие сигнала в СФ.
. Если сигнал с таким свойством поступает на согласованный с
ним Фильтр, то длительность основной части реакции последнего (главный
лепесток) оказывается значительно меньше с,
т.е. происходит сжатие сигнала в СФ.
Сигналы в виде одиночных импульсов
без угловой модуляции, называемые простыми, имеют действительную
неотрицательную комплексную огибающую  Поэтому для них значение к
не может быть заметно меньше длительности импульса с. Следовательно,
чтобы соблюсти условие , необходимо «усложнить» комплексную огибающую
Поэтому для них значение к
не может быть заметно меньше длительности импульса с. Следовательно,
чтобы соблюсти условие , необходимо «усложнить» комплексную огибающую  осуществив в пределах длительности сигнала модуляцию его
фазы или частоты. Введению такой модуляции и сопровождающему его эффекту
укорочения корреляционной функции будет неизбежно сопутствовать значительное
расширение спектра сигнала. Действительно, спектр сигнала на выходе СФ
осуществив в пределах длительности сигнала модуляцию его
фазы или частоты. Введению такой модуляции и сопровождающему его эффекту
укорочения корреляционной функции будет неизбежно сопутствовать значительное
расширение спектра сигнала. Действительно, спектр сигнала на выходе СФ  будет тем шире, чем короче сам выходной сигнал фильтра, что
можно выразить соотношением
будет тем шире, чем короче сам выходной сигнал фильтра, что
можно выразить соотношением  — ширина спектра
— ширина спектра  Ввиду того, что
Ввиду того, что
передаточная функция СФ  , амплитудно-частотный спектр
, амплитудно-частотный спектр  сигнала на выходе СФ повторяет по форме энергетический
спектр входного сигнала. Поэтому ширина спектра
сигнала на выходе СФ повторяет по форме энергетический
спектр входного сигнала. Поэтому ширина спектра  последнего совпадает
с
последнего совпадает
с  В результате приходим к следующему выводу: для того чтобы
сигнал обладал свойством сжатия в СФ ширина его спектра должна удовлетворять
неравенству
В результате приходим к следующему выводу: для того чтобы
сигнал обладал свойством сжатия в СФ ширина его спектра должна удовлетворять
неравенству  . Иными словами, для любых сигналов,
поддающихся сжатию в СФ, база В, определяемая как произведение ширины спектра
на длительность, должна быть большой:
. Иными словами, для любых сигналов,
поддающихся сжатию в СФ, база В, определяемая как произведение ширины спектра
на длительность, должна быть большой: 
Сигналы с большими базами (как это
уже отмечалось) называются сложными (шумоподобными либо широкополосными). Последний
термин не следует рассматривать как антоним термина «узкополосный»,
предполагающий  .
.
Когда говорят о сложных сигналах,
необходимо отметить, что сжатие их происходит в СФ, т.е. одновременно с обработкой,
максимизирующей выходное отношение сигнал/шум. С помощью специально
подобранного фильтра можно «укоротить» любой сигнал, однако для простых
сигналов это достигается ценой больших потерь в выходном отношении сигнал/шум
по сравнению с согласованной фильтрацией. В то же время нередки случаи, когда
помехи в виде запаздывающих или опережающих копий сигнала представляют гораздо
большую опасность, чем флуктуационные шумы. Тогда приходится заведомо соглашаться
на определенные потери в отношении сигнал/шум, применяя вместо согласованных
фильтров фильтры, обеспечивающие более высокую степень сжатия сигнала.
Разрешение по времени запаздывания
и частоте. В ряде случаев интерферирующие на входе приемника сигналы,
отраженные различными целями, отличаются друг от друга не только временем
запаздывания, но и допплеровскими сдвигами спектра. При этом приходится
говорить о разрешении сигналов по времени запаздывания и по частоте F, т.е. по двухмерному векторному параметру
 , компонентами которого служат
, компонентами которого служат  Качество разрешения при этом определяется видом
частотно-временной ФН
Качество разрешения при этом определяется видом
частотно-временной ФН

Подробнее вопросы разрешения по
времени и частоте рассмотрены в подразд. 4.5. Разрешение по угловым
координатам, как уже отмечалось ранее, изучается в подразд. 8.2 с позиции
пространственно-временной обработки сигналов.
4.4. Виды сложных сигналов
Сигналы с непрерывной частотной
модуляцией. Пусть в течение длительности  сигнала s(t) мгновенное значение
частоты его заполнения линейно нарастает от
сигнала s(t) мгновенное значение
частоты его заполнения линейно нарастает от  центральная частота; Wf— девиация частоты сигнала. Принимая за
точку t = 0 момент, соответствующий середине
сигнала, запишем выражения для его частоты f(t) и фазы
центральная частота; Wf— девиация частоты сигнала. Принимая за
точку t = 0 момент, соответствующий середине
сигнала, запишем выражения для его частоты f(t) и фазы  при
при 


где без ограничения общности
принято значение фазы Ф(0) = 0.
Радиосигнал с угловой модуляцией
вида (см. выражения (4.26)) называется
линейно-частотно-модулированным
импульсом (ЛЧМ импульсом).
Второе из выражений (4.26)
позволяет записать прямоугольный ЛЧМ импульс амплитуды А в виде следующей
функции времени: 
Следовательно, с учетом выражений
(4.27) комплексная огибающая прямоугольного ЛЧМ импульса
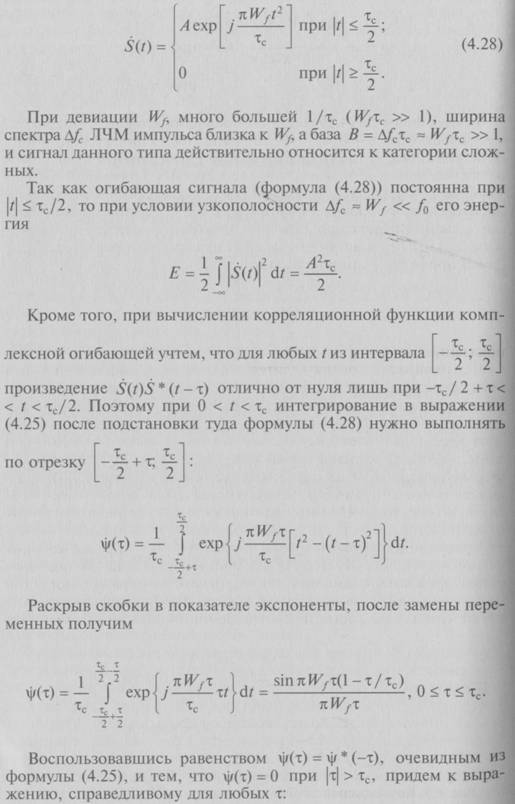
Точная формула (4.29) в случаях
больших девиаций  , т.е. больших баз
, т.е. больших баз  , допускает наглядное приближение. Действительно, когда
произведение
, допускает наглядное приближение. Действительно, когда
произведение  достаточно велико, абсолютное значение
знаменателя
достаточно велико, абсолютное значение
знаменателя  дроби в формуле (4.29) становится большим уже при малых
дроби в формуле (4.29) становится большим уже при малых  затухает до пренебрежимого уровня уже при
затухает до пренебрежимого уровня уже при  . Поэтому в той области значений
. Поэтому в той области значений  , где с уровнем
, где с уровнем  приходится считаться, сомножитель
приходится считаться, сомножитель  в аргументе синуса практически равен единице. Это и приводит
к аппроксимации
в аргументе синуса практически равен единице. Это и приводит
к аппроксимации

показанной на рис. 4.3.
Если принять за оценку длительности
 корреляционной функции, представленной формулой (4.30),
расстояние между ближайшими к ее максимуму нулями
корреляционной функции, представленной формулой (4.30),
расстояние между ближайшими к ее максимуму нулями  , то для ЛЧМ импульсов
с большими базами обнаруживается эффект сжатия импульсов в СФ. Этот эффект
проявляется в существенном уменьшении
, то для ЛЧМ импульсов
с большими базами обнаруживается эффект сжатия импульсов в СФ. Этот эффект
проявляется в существенном уменьшении  относительно длительности
относительно длительности  исходного импульса
исходного импульса  . Форма реакции СФ на радиоимпульс (см.
формулу (4.27)), описываемая функцией (4.30), подтверждает изложенное ранее
относительно спектра ЛЧМ импульса, поскольку радиоимпульс с огибающей sinx/x имеет прямоугольный спектр с шириной, обратной расстоянию
первого нуля функции (4.30) от начала координат:
. Форма реакции СФ на радиоимпульс (см.
формулу (4.27)), описываемая функцией (4.30), подтверждает изложенное ранее
относительно спектра ЛЧМ импульса, поскольку радиоимпульс с огибающей sinx/x имеет прямоугольный спектр с шириной, обратной расстоянию
первого нуля функции (4.30) от начала координат:  Но так как спектр на выходе СФ повторяет по форме квадрат
амплитудно-частотного спектра входного сигнала, то амплитудно-частотный спектр
ЛЧМ импульса приближенно (в силу нестрогости соотношения (4.30)) можно
полагать
Но так как спектр на выходе СФ повторяет по форме квадрат
амплитудно-частотного спектра входного сигнала, то амплитудно-частотный спектр
ЛЧМ импульса приближенно (в силу нестрогости соотношения (4.30)) можно
полагать

равномерным в диапазоне  и равным нулю вне этого отрезка.
и равным нулю вне этого отрезка.
Пользуясь выражением (4.17), можно
оценить точностные характеристики РЛС, использующей ЛЧМ импульс.
Технические средства, применяемые
для формирования и согласованной фильтрации ЛЧМ сигналов, разнообразны. Для импульсов
длительностью тс вплоть до десятков —сотен микросекунд и девиациями
до нескольких мегагерц наиболее характерно построение СФ с использованием
дисперсионных линий задержки на поверхностных акустических волнах (ПАВ).
Групповое время задержки t3 в дисперсионных линиях зависит от частоты 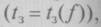 и если в пределах полосы ЛЧМ сигнала функция t3(f) линейно убывает с угловым коэффициентом
и если в пределах полосы ЛЧМ сигнала функция t3(f) линейно убывает с угловым коэффициентом  (рис. 4.4), то подобный четырехполюсник, последовательно
соединенный с неиска- жающим полосовым фильтром с полосой Wf, образует СФ для сигнала (см. формулу (4.27)).
Объяснение этого факта базируется на осмыслении физики работы любого СФ,
функции которого сводятся к накоплению (запоминанию и взвешенному суммированию)
последовательно поступающих на вход фрагментов сигнала. ЛЧМ сигнал начинается
с низкочастотных колебаний
(рис. 4.4), то подобный четырехполюсник, последовательно
соединенный с неиска- жающим полосовым фильтром с полосой Wf, образует СФ для сигнала (см. формулу (4.27)).
Объяснение этого факта базируется на осмыслении физики работы любого СФ,
функции которого сводятся к накоплению (запоминанию и взвешенному суммированию)
последовательно поступающих на вход фрагментов сигнала. ЛЧМ сигнал начинается
с низкочастотных колебаний  близка к
близка к  которые в дисперсионной линии будут задержаны
на максимальное время порядка
которые в дисперсионной линии будут задержаны
на максимальное время порядка  (см. рис. 4.4). Идущий затем отрезок
сигнала с более высокой частотой запоздает на меньшее время таким образом,
чтобы к моменту «догнать» предшествовавший, и т.д. Заключительный отрезок
сигнала задержится только на время t0, догнав все предыдущие. Поэтому в момент
произойдет синфазное сложение всех собравшихся вместе
сигналов, дающее основной пик отклика на рис. 4.3. Результатом интерференции
отрезков в другие моменты времени будут изменения комплексной огибающей на
выходе по закону, воспроизведенному на рис. 4.3.
(см. рис. 4.4). Идущий затем отрезок
сигнала с более высокой частотой запоздает на меньшее время таким образом,
чтобы к моменту «догнать» предшествовавший, и т.д. Заключительный отрезок
сигнала задержится только на время t0, догнав все предыдущие. Поэтому в момент
произойдет синфазное сложение всех собравшихся вместе
сигналов, дающее основной пик отклика на рис. 4.3. Результатом интерференции
отрезков в другие моменты времени будут изменения комплексной огибающей на
выходе по закону, воспроизведенному на рис. 4.3.
Для обработки ЛЧМ сигнала с шириной
спектра в сотни и тысячи мегагерц возможности устройств на ПАВ оказываются исчерпанными,
и в этих случаях целесообразно использование
акустооптических сигнальных
процессоров. При построении акустооптических согласованных фильтров (АОСФ) для
широкополосных, но достаточно коротких (десятки микросекунд) ЛЧМ импульсов
можно использовать АОСФ с пространственным интегрированием сигнала.
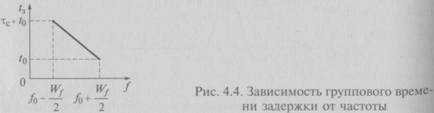
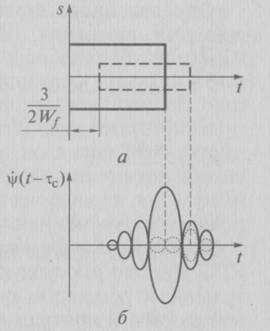
Достоинствами такого фильтра
являются исключительная простота и широкополосность. Для обработки
широкополосных и протяженных по времени сигналов необходимо использовать АОСФ
с временным интегрированием, для которого длительность обрабатываемого сигнала
может достигать десятков миллисекунд*.
Отметим, что хотя за длительность
сжатого ЛЧМ импульса была принята ширина основного пика, выбросы  за пределами интервала
за пределами интервала
 (боковые лепестки) достигают значительного уровня,
спадающего в обратной пропорции от
(боковые лепестки) достигают значительного уровня,
спадающего в обратной пропорции от  . Первый
. Первый
— максимальный по уровню боковой лепесток
— при  лишь в
лишь в  раза (-13 дБ) ниже основного пика. Столь заметные боковые
лепестки могут существенно повысить риск аномальных ошибок при измерении
времени запаздывания ЛЧM сигнала и затруднить разрешение импульсов, имеющих разброс
по времени, близкий к
раза (-13 дБ) ниже основного пика. Столь заметные боковые
лепестки могут существенно повысить риск аномальных ошибок при измерении
времени запаздывания ЛЧM сигнала и затруднить разрешение импульсов, имеющих разброс
по времени, близкий к 
На рис. 4.5, а сплошными и
пунктирными линиями условно обозначены соответственно сильный и слабый ЛЧМ
импульсы, сдвинутые друг относительно друга по времени на 3/(2
Wf). В этом случае из-за интерференции откликов СФ на
перекрывающиеся ЛЧМ сигналы боковые лепестки сильного сигнала на выходе фильтра
(сплошные линии на рис. 4.5, б) могут замаскировать основной пик слабого
выходного импульса (пунктир на рис. 4.5, б).
На практике часто важно не
пропустить именно полезный слабый радиосигнал на фоне близко расположенного
мешающего сильного. Так, в радиолокации отраженный лоцируемой целью импульс
нередко теряется в более сильных отражениях от близких посторонних объектов
(построек, морской поверхности, элементов рельефа, специально устанавливаемых
ложных целей); в дальней радионавигации используемый для местоопределения
слабый сигнал поверхностной волны маскируется накладывающимся на него более
сильным, отраженным ионосферой. Поэтому так актуальны попытки избежать
осложнений, связанных с наличием у ФН  ЛЧМ импульсов больших боковых лепестков.
ЛЧМ импульсов больших боковых лепестков.
Определенного снижения уровня
боковых лепестков можно добиться, применяя ЛЧМ сигналы с непрямоугольными
гладкими (типа колоколообразных) огибающими, переходя к нелинейной частотной
модуляции либо заменяя согласованную фильтрацию специальной весовой
обработкой*.
Некоторые трудности, связанные с
высокой широкополое- ностью ЧМ сигналов, исключаются при использовании ступенчатого
изменения частоты от импульса к импульсу пачек радиоимпульсов, периодически
излучаемых РЛС. Структура РЛС со ступенчатым изменением частоты рассмотрена в
подразд. 4.6.
Дискретные и фазоманипулированные
сигналы. В современных РТС
широко используются дискретные сигналы, т.е. последовательности регулярно
повторяющихся радиоимпульсов одинаковой формы и центральной частоты,
отличающихся друг от друга лишь значениями комплексных амплитуд. Модель jV-импульсного дискретного сигнала может быть записана в виде

где  — аналитический сигнал, реальная часть которого
— аналитический сигнал, реальная часть которого  описывает отдельный (одиночный) импульс пакета;
описывает отдельный (одиночный) импульс пакета;  комплексная огибающая одиночного импульса
комплексная огибающая одиночного импульса  учитывающая форму его действительной огибающей S0(t), а также закон внутриимпульсной угловой модуляции
учитывающая форму его действительной огибающей S0(t), а также закон внутриимпульсной угловой модуляции  — период повторения импульсов в пакете;
— период повторения импульсов в пакете;  — комплексная амплитуда i-го импульса (модуль
— комплексная амплитуда i-го импульса (модуль  и аргумент
и аргумент  , , которые задают действительную амплитуду
и начальную фазу i-го импульса пакета). Набор
, , которые задают действительную амплитуду
и начальную фазу i-го импульса пакета). Набор 
 устанавливающий закон изменения амплитуд и фаз дискретного
сигнала от импульса к импульсу, называется кодовой последовательностью, или кодом.
устанавливающий закон изменения амплитуд и фаз дискретного
сигнала от импульса к импульсу, называется кодовой последовательностью, или кодом.
Вычислим корреляционную функцию  комплексной огибающей
комплексной огибающей 
дискретного сигнала (см. формулу
(4.31)). Подставив выражение (4.32) в выражение (4.25), найдем
Формула  следует из выражения (4.35) после замены индекса
суммирования
следует из выражения (4.35) после замены индекса
суммирования  Название
«корреляционная функция»
Название
«корреляционная функция»  отражает смысл этой функции,
показывающей, насколько близки, коррелированны между собой кодовая
последовательность
отражает смысл этой функции,
показывающей, насколько близки, коррелированны между собой кодовая
последовательность  и ее копия, сдвинутая на т позиций. Для вычисления,
например,
и ее копия, сдвинутая на т позиций. Для вычисления,
например,  нужно под исходной кодовой последовательностью записать ее
сдвинутую на две позиции вправо комплексно-сопряженную копию
нужно под исходной кодовой последовательностью записать ее
сдвинутую на две позиции вправо комплексно-сопряженную копию 
и, перемножив попарно стоящие в
каждом столбце этой записи элементы, просуммировать полученные произведения,
после чего умножить результат на нормирующую константу 
Понятно, что  потому что сдвинутая на такое число позиций кодовая
последовательность не перекроется с исходной. Окончательно для корреляционной
функции (4.36) получим
потому что сдвинутая на такое число позиций кодовая
последовательность не перекроется с исходной. Окончательно для корреляционной
функции (4.36) получим 
Отсюда видно, что корреляционная
функция комплексной огибающей дискретного сигнала (см. формулу (4.31)) есть
сумма повторяющихся с интервалом Тп корреляционных функций комплексной
огибающей одиночного импульса, взвешенных корреляционной функцией кодовой
последовательности 
Так как  воспроизводит комплексную огибающую одиночного импульса
воспроизводит комплексную огибающую одиночного импульса  пропущенного через согласованный с ним фильтр, то
длительность
пропущенного через согласованный с ним фильтр, то
длительность  комплексной огибающей
комплексной огибающей  не превышает удвоенной длительности одиночного импульса
не превышает удвоенной длительности одиночного импульса 
 Таким образом, корреляционная функция
Таким образом, корреляционная функция  (см. формулу (4.38)) комплексной огибающей пакета (см.
формулу (4.31)) представляет собой группу из 2N
- 1 повторяющихся с
интервалом Тп импульсов вида с длительностью не
более
(см. формулу (4.38)) комплексной огибающей пакета (см.
формулу (4.31)) представляет собой группу из 2N
- 1 повторяющихся с
интервалом Тп импульсов вида с длительностью не
более  , причем комплексная амплитуда m-го импульса этого
нового пакета равна значению корреляционной функции кодовой последовательности
, причем комплексная амплитуда m-го импульса этого
нового пакета равна значению корреляционной функции кодовой последовательности
 дискретного сигнала (см. формулу (4.31)) при m-го сдвиге.
дискретного сигнала (см. формулу (4.31)) при m-го сдвиге.
Нетрудно понять, какое необходимое
и достаточное условие должно быть выполнено для того, чтобы дискретный сигнал
сжимался в СФ. Если бы кодовая последовательность была не коррелированна со
всеми своими сдвигами  то в сумме (см. формулу (4.38)) осталось бы единственное
ненулевое слагаемое с
то в сумме (см. формулу (4.38)) осталось бы единственное
ненулевое слагаемое с 

и корреляционная функция комплексной огибающей сигнала имела бы вид одиночного
импульса  длительностью
длительностью  . Отсчитывая эту длительность по
некоторому условному ненулевому уровню, можно в первом приближении принять
. Отсчитывая эту длительность по
некоторому условному ненулевому уровню, можно в первом приближении принять  В то же время длительность сигнала
В то же время длительность сигнала  поэтому при выполнении перечисленных требований к
корреляционной функции кодовой последовательности произошло бы сжатие сигнала
в N раз. Так как ширина спектра сжатого сигнала, а следовательно, и самого пакета
не менее
поэтому при выполнении перечисленных требований к
корреляционной функции кодовой последовательности произошло бы сжатие сигнала
в N раз. Так как ширина спектра сжатого сигнала, а следовательно, и самого пакета
не менее  то для дискретного сигнала длительности
то для дискретного сигнала длительности  не менее длины кодовой последовательности N.
не менее длины кодовой последовательности N.
Так как первый и последний импульсы
в выражении (4.31) по определению имеют ненулевые амплитуды 
 и обращение в нуль
и обращение в нуль  при всех ненулевых m заведомо невозможно. Поэтому функция (4.38) кроме основного
пика будет иметь и боковые, уровень которых определяется значениями при
при всех ненулевых m заведомо невозможно. Поэтому функция (4.38) кроме основного
пика будет иметь и боковые, уровень которых определяется значениями при  Для
того чтобы сделать максимальный боковой лепесток у(т) приемлемо малым,
необходимо добиться минимума, максимального по всем
Для
того чтобы сделать максимальный боковой лепесток у(т) приемлемо малым,
необходимо добиться минимума, максимального по всем
ненулевым m уровням корреляции  кодовой
кодовой
последовательности со своими
сдвигами: 
На практике элементы  , кодовых последовательностей выбирают не произвольно, а из
некоторого заранее оговоренного множества — алфавита кода — по возможности
небольшого объема. Подобное ограничение, как правило, отражает желание максимально
упростить формирование и обработку дискретных сигналов.
, кодовых последовательностей выбирают не произвольно, а из
некоторого заранее оговоренного множества — алфавита кода — по возможности
небольшого объема. Подобное ограничение, как правило, отражает желание максимально
упростить формирование и обработку дискретных сигналов.
По этим соображениям предпочтение
нередко отдается двоичным фазоманипулированным сигналам, т.е. дискретным сигналам
с действительными элементами кода, принадлежащими двоичному алфавиту  амплитудная модуляция импульсов (см. формулу (4.31))
отсутствует, так что энергия двоичного фазоманипулированного сигнала
равномерно рассредоточена в пределах его длительности, что обычно и требуется
от сложного сигнала. В то же время начальные фазы радиоимпульсов такого
сигнала могут принимать только два значения:
амплитудная модуляция импульсов (см. формулу (4.31))
отсутствует, так что энергия двоичного фазоманипулированного сигнала
равномерно рассредоточена в пределах его длительности, что обычно и требуется
от сложного сигнала. В то же время начальные фазы радиоимпульсов такого
сигнала могут принимать только два значения:  , что заметно упрощает и удешевляет
соответствующие схемотехнические средства.
, что заметно упрощает и удешевляет
соответствующие схемотехнические средства.
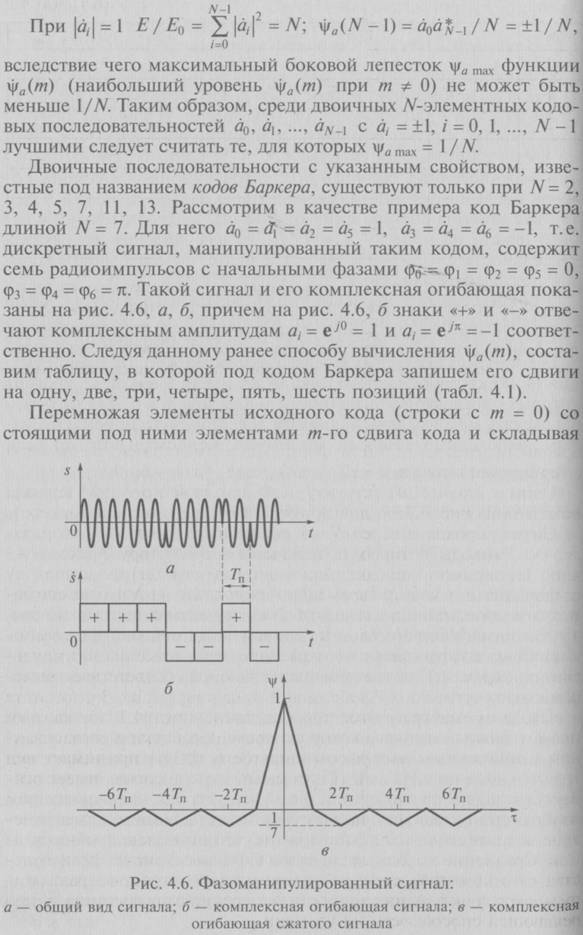
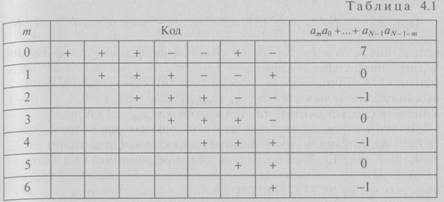
произведения, получим числа,
стоящие в последнем столбце табл. 4.1. После деления на N- 7 получим значения  Обращаясь к выражению (4.38) и имея в виду, что
корреляционная функция
Обращаясь к выражению (4.38) и имея в виду, что
корреляционная функция  одиночного прямоугольного видеоимпульса длительностью Тп имеет форму равнобедренного треугольника с основанием 2 Тп, приходим к выводу, что для двоичного ФМ сигнала на основе
кода Баркера комплексная огибающая сжатого сигнала характеризуется основным треугольным
пиком и «отрицательными» боковыми лепестками той же формы, но в семь раз
меньшей высоты с вершинами в точках
одиночного прямоугольного видеоимпульса длительностью Тп имеет форму равнобедренного треугольника с основанием 2 Тп, приходим к выводу, что для двоичного ФМ сигнала на основе
кода Баркера комплексная огибающая сжатого сигнала характеризуется основным треугольным
пиком и «отрицательными» боковыми лепестками той же формы, но в семь раз
меньшей высоты с вершинами в точках  (рис. 4.6, в).
(рис. 4.6, в).
Одна из возможных структур СФ для
двоичного ФМ сигнала показана на рис. 4.7, а (для примера взят прежний код
Баркера).
Сигнал проходит через N - 1
последовательных элементов задержки, выходы которых подключены к сумматору с
весами +1 или -1, взятыми в порядке, зеркальном по отношению к порядку
следования  в коде, за время Тп. В результате на N входах сумматора
при поступлении на вход СФ сигнала, показанного на рис. 4.7, б, появляются его
сдвиги, причем те из них, которые умножаются на коэффициент -1, изменяют
начальные фазы импульсов на
в коде, за время Тп. В результате на N входах сумматора
при поступлении на вход СФ сигнала, показанного на рис. 4.7, б, появляются его
сдвиги, причем те из них, которые умножаются на коэффициент -1, изменяют
начальные фазы импульсов на  рис. 4.7, в, где нумерация эпюров соответствует номерам
входов сумматора, изображенного на (рис. 4.7, а). В результате с выхода
сумматора снимается колебание (рис. 4.7, г), каждый прямоугольный импульс
которого после обработки в согласованном с одиночным импульсом фильтре (СФОИ)
принимает вид треугольника (рис. 4.7, д). Получаемый в итоге сигнал имеет огибающую
вида
рис. 4.7, в, где нумерация эпюров соответствует номерам
входов сумматора, изображенного на (рис. 4.7, а). В результате с выхода
сумматора снимается колебание (рис. 4.7, г), каждый прямоугольный импульс
которого после обработки в согласованном с одиночным импульсом фильтре (СФОИ)
принимает вид треугольника (рис. 4.7, д). Получаемый в итоге сигнал имеет огибающую
вида  (см. рис. 4.6, в). На рис. 4.7, д пунктиром изображена
огибающая на выходе СФ для радиоимпульса, имеющего длительность 7 Тп, но при отсутствии фазовой манипуляции. Сравнение выходных
сигналов СФ иллюстрирует преимущества сложного ФМ сигнала по сравнению с
простым радиоимпульсом с точки зрения точности измерения запаздывания и разрешающей
способности по времени.
(см. рис. 4.6, в). На рис. 4.7, д пунктиром изображена
огибающая на выходе СФ для радиоимпульса, имеющего длительность 7 Тп, но при отсутствии фазовой манипуляции. Сравнение выходных
сигналов СФ иллюстрирует преимущества сложного ФМ сигнала по сравнению с
простым радиоимпульсом с точки зрения точности измерения запаздывания и разрешающей
способности по времени.

Несуществование кодов Баркера для N
> 13 стимулировало поиски двоичных ФМ сигналов, обладающих малым (хотя и
большим 1/N) уровнем бокового лепестка при больших длинах N. Таких
сигналов известно сейчас довольно много, хотя вопрос об их оптимальности и
существовании лучших кодов не решен. К числу последовательностей с особо
интересными корреляционными свойствами относятся двоичные M-последовательности,
существующие для любых длин вида  — натуральное число).
— натуральное число).
Чтобы проиллюстрировать достоинства
этих последовательностей, введем еще одно понятие.
Если любую последовательность
длиной N сдвигать на т позиций не так, как прежде, а циклически, т.е.
то корреляция кода с его m-м циклическим
сдвигом будет определяться несколько иначе, чем в выражении (4.37): в
соответствующей сумме при любом m всегда будет точно N слагаемых. Корреляционные свойства
последовательностей при циклических сдвигах характеризуются периодической автокорреляционной функцией
где обозначение  символизирует вычитание по модулю N, т. е. взятие остатка от деления (t- m) на N.
символизирует вычитание по модулю N, т. е. взятие остатка от деления (t- m) на N.
На практике дискретные сигналы
иногда передаются не изолированными пакетами, а повторяются с интервалом NTп, образуя бесконечную периодическую последовательность
манипулированных радиоимпульсов: спустя Тп секунд после импульса с комплексной
амплитудой  следует импульс с комплексной амплитудой
следует импульс с комплексной амплитудой  и сигнал (см. формулу (4.31)) повторяется. В этих случаях
важно, чтобы малый уровень боковых лепестков имела функция
и сигнал (см. формулу (4.31)) повторяется. В этих случаях
важно, чтобы малый уровень боковых лепестков имела функция  периодична по m с периодом N, т.е.
периодична по m с периодом N, т.е.  то
то  и желаемое свойство
и желаемое свойство  можно сформулировать как равенство нулю ее значений при
всех m, не кратных N.
можно сформулировать как равенство нулю ее значений при
всех m, не кратных N.
Многочисленными исследованиями
установлено, что для двоичных последовательностей с элементами +1, -1 это
требование невыполнимо (за исключением тривиального случая N = 4). Поэтому
^-последовательности (наряду с некоторыми другими) являются оптимальными среди
двоичных, так как их боковые лепестки  при всех значениях m, не кратных N) имеют минимально
возможный при нечетных длинах уровень. Что же касается «пакетных» (не
периодических) свойств, то максимум бокового лепестка
при всех значениях m, не кратных N) имеют минимально
возможный при нечетных длинах уровень. Что же касается «пакетных» (не
периодических) свойств, то максимум бокового лепестка  автокорреляционной функции
автокорреляционной функции  для M-последовательностей имеет значение,
близкое к 1 /N, что считается вполне приемлемым, так
как пока никаких двоичных кодов с существенно меньшим уровнем неизвестно.
для M-последовательностей имеет значение,
близкое к 1 /N, что считается вполне приемлемым, так
как пока никаких двоичных кодов с существенно меньшим уровнем неизвестно.
Отобранные здесь в качестве
примеров виды сложных сигналов не должны рассматриваться как самые типичные для
современных РТС. Упоминание именно этих сигналов связано с их большей
методической наглядностью по сравнению с другими. В реальных же системах
помимо рассмотренных находят применение и другие виды сложных сигналов. Так,
для получения нулевых боковых лепестков  вместо двоичной часто применяют р-чную фазовую манипуляцию либо двоичную
ФМ дополняют введением пассивных пауз.
вместо двоичной часто применяют р-чную фазовую манипуляцию либо двоичную
ФМ дополняют введением пассивных пауз.
Остановимся на некоторых часто
используемых кодированных сигналах. Из так называемых полифазных кодов (р -ичная ФМ) интересны коды Франка,
представляемые в виде матрицы (4.39), элементы которой умножаются на дискрет
изменения начальной фазы элементарных импульсов ФМ сигнала 

При этом число элементарных
импульсов кодовой последовательности N = р2, что определяет возможный коэффициент
сжатия и уровень боковых лепестков. При больших TV величина последних в  ниже основного пика сжатого сигнала. Так, при р =
5 дискретность изменения фазы
составляет 12°, длина последовательности и коэффициент сжатия равны
ниже основного пика сжатого сигнала. Так, при р =
5 дискретность изменения фазы
составляет 12°, длина последовательности и коэффициент сжатия равны
N = р2 = 25,
а уровень боковых лепестков на 23,9 дБ ниже основного пика.
Для сравнения M-последовательность
длины 31 (ближайшей к 25) дает при сжатии уровень боковых лепестков на 17,8 дБ
ниже основного.
Весьма интересны частотно-временные
коды Костаса, при использовании которых сигнал представляет собой последовательность
из М примыкающих друг к
другу радиоимпульсов (рис. 4.8, а), частоты заполнения которых скачкообразно
изменяются в соответствии с выбранным кодом. Частота каждого импульса длительностью
 М выбирается из М частот, перекрывающих полосу
М выбирается из М частот, перекрывающих полосу

шириной  (рис. 4.8, б). При определенном выборе частот импульсов
последовательности (рис. 4.8, в) можно получить ФН, близкую по форме к
«кнопочной». В этом случае коэффициент сжатия достигает величины
(рис. 4.8, б). При определенном выборе частот импульсов
последовательности (рис. 4.8, в) можно получить ФН, близкую по форме к
«кнопочной». В этом случае коэффициент сжатия достигает величины  . При
. При  коэффициент сжатия равен М2. Отметим, что для ФМ сигналов, у которых
частоты элементарных импульсов одинаковы (изменяется начальная фаза элементарного
сигнала), база
коэффициент сжатия равен М2. Отметим, что для ФМ сигналов, у которых
частоты элементарных импульсов одинаковы (изменяется начальная фаза элементарного
сигнала), база  и коэффициент сжатия равен М.
и коэффициент сжатия равен М.
При надлежащем выборе частот
импульсов последовательности можно получить боковые лепестки в М раз ниже основного по напряжению или в М2раз по мощности. Это легко понять из рис.
4.9, на котором приведены две смещенных диаграммы Костаса для М =
6.
Тонкими линиями изображена
диаграмма кода передаваемого сигнала, причем выбранные элементы отмечены
прямоугольниками в соответствующих ячейках диаграммы. Жирной линией выделена
диаграмма принимаемого сигнала, задержанного на время  и имеющего смещение по частоте
и имеющего смещение по частоте  Соответственно задержке по оси времени и сдвигу по частоте
диаграмма принятого сигнала смещена на 2 ячейки вправо по оси времени и на 3
ячейки вверх по оси частот, причем при приеме элементы отмечены окружностями.
Совпадение временного положения и частоты будет только в одной из М2
= 36 ячеек диаграммы,
что и определяет значение ФН в точке
Соответственно задержке по оси времени и сдвигу по частоте
диаграмма принятого сигнала смещена на 2 ячейки вправо по оси времени и на 3
ячейки вверх по оси частот, причем при приеме элементы отмечены окружностями.
Совпадение временного положения и частоты будет только в одной из М2
= 36 ячеек диаграммы,
что и определяет значение ФН в точке 
Число возможных кодовых комбинаций
быстро возрастает с увеличением M, а вместе с ним увеличивается коэффициент
сжатия сигнала. При больших М можно обеспечить и низкий уровень боковых лепестков. Так,
при М = 24
коэффициент сжатия равен 
576, а уровень боковых лепестков ФН
примерно на 27 дБ ниже основного.
Большое внимание, уделяемое
снижению уровня боковых лепестков сжатого сигнала, объясняется их
отрицательным влиянием на возможность надежного разрешения по времени (дальности)
двух близко расположенных объектов, особенно в случаях, когда их сигналы сильно
отличаются по интенсивности. Особое значение снижение уровня боковых лепестков
имеет в условиях наблюдения целей на фоне мешающих отражателей, создающих
сильные сигналы на большом интервале временных задержек, в пределы которого
попадают сигналы, отраженные от наблюдаемых целей, и они становятся неразличимыми
на фоне мешающих отражений. В таких ситуациях короткие периодические импульсы,
в принципе не имеющие боковых лепестков на оси времени, предпочтительнее, если
при этом можно обеспечить одновременно с заданной разрешающей способностью по
дальности также необходимую максимальную дальность обнаружения и однозначность
ее измерения.
Применение простых коротких
импульсных сигналов снижает также возможность возникновения перекрестных
пассивных помех, когда приемник одной РЛС принимает отраженные целью сигналы
при ее облучении зондирующим импульсом другой РЛС, работающей на той же или
близкой волне. При необходимости использования длинных, сжимаемых при обработке
сигналов, весьма важно обеспечить снижение боковых лепестков. Анализ
показывает, что при использовании ЛЧМ сигналов для уменьшения возможности
взаимных помех полезно применять в соседних РЛС противоположный наклон ЧМ.
Синтезу периодических дискретных
сигналов с оптимальными корреляционными свойствами и исследованию процедур
подавления боковых лепестков при их обработке посвящена монография [7], в
которой приведен каталог бинарных последовательностей с малыми потерями,
сопровождающими подавление боковых лепестков на временной оси, а также
троичных последовательностей с идеальными периодическими автокорреляционными
свойствами.
4.5. Разрешение по времени запаздывания
и частоте.
Частотно-временная функция
неопределенности сигнала
В локационных системах
интерферирующие на входе приемника сигналы, отраженные различными целями,
обычно отличаются друг от друга не только временем запаздывания, но и доппле-
ровскими сдвигами. В случаях, характерных, например, для радионавигации, 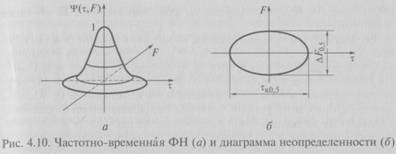
связи по многолучевым трассам,
приходится говорить о разрешении сигналов по времени запаздывания  и частоте F, т.е. по двухмерному векторному параметру
и частоте F, т.е. по двухмерному векторному параметру  , компонентами которого служат
, компонентами которого служат  . Качество разрешения
при этом определяется видом частотно-временной ФН
. Качество разрешения
при этом определяется видом частотно-временной ФН 
Геометрически  задает некоторую поверхность над координатной плоскостью
задает некоторую поверхность над координатной плоскостью  причем в начале координат
причем в начале координат  , F = 0 высота этой поверхности фиксирована и
равна
, F = 0 высота этой поверхности фиксирована и
равна  (рис. 4.10, а).
(рис. 4.10, а).
Две копии сигнала, сдвинутые друг
относительно друга по времени запаздывания на  и по частоте на F, разрешить тем легче, чем ниже уровень ФН (формула (4.40))
при данных , F, т.е. чем меньше высота поверхности на рис. 4.10, а в точке с
координатами , F. Таким образом, желательно, чтобы ФН
и по частоте на F, разрешить тем легче, чем ниже уровень ФН (формула (4.40))
при данных , F, т.е. чем меньше высота поверхности на рис. 4.10, а в точке с
координатами , F. Таким образом, желательно, чтобы ФН  как можно быстрее спадала по мере удаления точки (, F) от начала координат. Нужно отметить, что сечение
как можно быстрее спадала по мере удаления точки (, F) от начала координат. Нужно отметить, что сечение  плоскостью F= 0, как следует из формулы (4.40), есть ФН
по запаздыванию
плоскостью F= 0, как следует из формулы (4.40), есть ФН
по запаздыванию  и, следовательно, протяженность
и, следовательно, протяженность  по оси характеризует достижимую для данного
сигнала разрешающую способность только по времени запаздывания (т.е.
возможность разрешения двух копий сигнала, имеющих разное время запаздывания,
но одинаковые частотные сдвиги спектра). Аналогично протяженность вдоль оси F сечения
по оси характеризует достижимую для данного
сигнала разрешающую способность только по времени запаздывания (т.е.
возможность разрешения двух копий сигнала, имеющих разное время запаздывания,
но одинаковые частотные сдвиги спектра). Аналогично протяженность вдоль оси F сечения  ФН (см. формулу (4.32)) плоскостью х = 0
определяет разрешающую способность только по частоте (когда разрешаемые копии
сигнала совмещены по времени, но различаются частотными сдвигами спектра). При
этом, как следует из формулы (4.40), функция
ФН (см. формулу (4.32)) плоскостью х = 0
определяет разрешающую способность только по частоте (когда разрешаемые копии
сигнала совмещены по времени, но различаются частотными сдвигами спектра). При
этом, как следует из формулы (4.40), функция

повторяет по форме
амплитудно-частотный спектр квадрата действительной огибающей сигнала, т. е.
определяется исключительно законом амплитудной модуляции сигнала. Если
протяженность сечения  по
по  имеет порядок длительности
имеет порядок длительности  корреляционной функции комплексной огибающей сигнала, то
ширина сечения
корреляционной функции комплексной огибающей сигнала, то
ширина сечения  F) вдоль оси F близка к ширине спектра действительной огибающей сигнала,
т.е. значению, обратному длительности сигнала.
F) вдоль оси F близка к ширине спектра действительной огибающей сигнала,
т.е. значению, обратному длительности сигнала.
Следует отметить, что в аксонометрическом
изображении  (см. рис. 4.10, а), наглядном в качественном отношении, не
всегда удается учесть количественные соотношения, поэтому для графического
представления частотно-временной ФН нередко прибегают к методу, принятому в
топографии, где профиль рельефа местности на бумаге передают с помощью
изолиний, соединяющих географические точки одной и той же высоты. Чтобы таким
способом отразить рельеф поверхности, задаваемой ФН (см. формулу (4.40)),
следует нанести на плоскость
(см. рис. 4.10, а), наглядном в качественном отношении, не
всегда удается учесть количественные соотношения, поэтому для графического
представления частотно-временной ФН нередко прибегают к методу, принятому в
топографии, где профиль рельефа местности на бумаге передают с помощью
изолиний, соединяющих географические точки одной и той же высоты. Чтобы таким
способом отразить рельеф поверхности, задаваемой ФН (см. формулу (4.40)),
следует нанести на плоскость  сечения поверхности
сечения поверхности  горизонтальными плоскостями, поднятыми на ту или иную высоту
относительно координатной плоскости. Подобное сечение на высоте
горизонтальными плоскостями, поднятыми на ту или иную высоту
относительно координатной плоскости. Подобное сечение на высоте  , называемое областью высокой корреляции, или диаграммой
неопределенности (рис. 4.10, б), задает область, в пределах которой уровень ФН
превышает 0,5. Столь большое значение ФН позволяет с некоторой долей условности
считать, что любые две копии сигнала, у которых взаимные рассогласования по
времени запаздывания
, называемое областью высокой корреляции, или диаграммой
неопределенности (рис. 4.10, б), задает область, в пределах которой уровень ФН
превышает 0,5. Столь большое значение ФН позволяет с некоторой долей условности
считать, что любые две копии сигнала, у которых взаимные рассогласования по
времени запаздывания  и частоте F попадают в пределы области высокой корреляции, неразрешимы.
Это, в частности, означает, что для достижения высокой разрешающей способности
по времени и частоте необходимо, чтобы диаграмма неопределенности имела
довольно малую протяженность по любому направлению в плоскости При этом длина отрезка оси т в пределах области высокой
корреляции есть длительность
и частоте F попадают в пределы области высокой корреляции, неразрешимы.
Это, в частности, означает, что для достижения высокой разрешающей способности
по времени и частоте необходимо, чтобы диаграмма неопределенности имела
довольно малую протяженность по любому направлению в плоскости При этом длина отрезка оси т в пределах области высокой
корреляции есть длительность  корреляционной функции (см. формулу
(4.25)) по уровню 0,5, т.е. характеризует разрешающую способность только по
времени запаздывания. Аналогично длина отрезка оси F в пределах той же фигуры, равная ширине спектра
корреляционной функции (см. формулу
(4.25)) по уровню 0,5, т.е. характеризует разрешающую способность только по
времени запаздывания. Аналогично длина отрезка оси F в пределах той же фигуры, равная ширине спектра  квадрата действительной
огибающей сигнала по уровню 0,5, служит мерой разрешающей способности только по
частоте.
квадрата действительной
огибающей сигнала по уровню 0,5, служит мерой разрешающей способности только по
частоте.
Дополнительной иллюстрацией влияния
ФН (см. формулу (4.40)) на разрешающую способность служит тот факт, что ФН при
фиксированном значении F воспроизводит огибающую после СФ, на
который подается сигнал, расстроенный относительно фильтра на F герц. Набор таких
огибающих, после «гребенки» настроенных на разные частоты фильтров, образует
«пакет» сечений ФН  для разных значений F.
для разных значений F.
Для иллюстрации построим
частотно-временную ФН простейшего сигнала: радиоимпульса с прямоугольной
огибающей, для которого
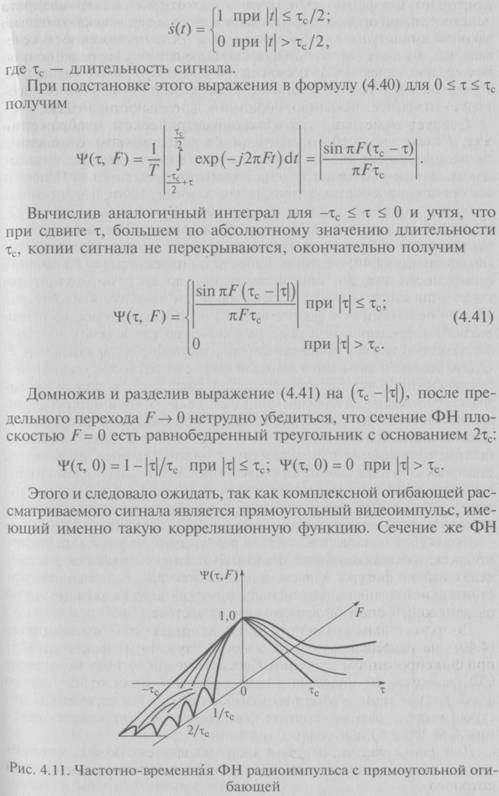
плоскостью  есть функция вида
есть функция вида  что опять же предсказуемо и без
вычисления ФН, так как квадрат огибающей прямоугольного радиоимпульса —
прямоугольный видеоимпульс, имеющий амплитудно-частотный спектр
что опять же предсказуемо и без
вычисления ФН, так как квадрат огибающей прямоугольного радиоимпульса —
прямоугольный видеоимпульс, имеющий амплитудно-частотный спектр  Кроме того, сечения ФН плоскостями
Кроме того, сечения ФН плоскостями  ненулевое целое, повторяют по форме модули синусов частот
ненулевое целое, повторяют по форме модули синусов частот  . Все эти детали отчетливо прослеживаются на аксонометрии
ФН, приведенной на рис. 4.11 и показывающей, что рельеф, сосредоточенный в
пределах полосы
. Все эти детали отчетливо прослеживаются на аксонометрии
ФН, приведенной на рис. 4.11 и показывающей, что рельеф, сосредоточенный в
пределах полосы  , имеет склоны от начала координат: линейный вдоль оси
, имеет склоны от начала координат: линейный вдоль оси  и вида sinx/x вдоль оси F;на расстояниях от оси , больших
и вида sinx/x вдоль оси F;на расстояниях от оси , больших  , поверхность
, поверхность  становится волнистой, приобретая характер извилистых гребней
и ложбин.
становится волнистой, приобретая характер извилистых гребней
и ложбин.
Область высокой корреляции для ФН,
показанная на рис. 4.12, заключает в себе отрезки осей , F, имеющие длины, связанные обратной
пропорцией, соответственно  . Следовательно, для прямоугольного
радиоимпульса улучшения разрешающей способности по времени запаздывания можно
достичь лишь ценой ухудшения разрешающей способности по частоте. Так, неограниченное
укорочение импульса, т.е. переход к огибающей типа
. Следовательно, для прямоугольного
радиоимпульса улучшения разрешающей способности по времени запаздывания можно
достичь лишь ценой ухудшения разрешающей способности по частоте. Так, неограниченное
укорочение импульса, т.е. переход к огибающей типа
 -функции, превратило бы область высокой
корреляции в бесконечно узкую полосу неограниченной протяженности вдоль оси F.
-функции, превратило бы область высокой
корреляции в бесконечно узкую полосу неограниченной протяженности вдоль оси F.
Это означает, что две копии
сигнала, разнесенные по времени запаздывания на любое ненулевое значение , оказались бы легко разрешимыми, тогда как совмещенные по
времени копии несмотря на сколь угодно большую частотную расстройку разрешить
бы не удалось. Аналогично, устремляя  т.е. переходя к сигналу в виде
немодулированного гармонического колебания, можно получить ДН в виде полосы,
вытянутой вдоль оси х. При этом сигналы с какой угодно отличной от нуля
частотной расстройкой разрешаются без затруднений, тогда как копии сигнала с
совпадающими частотами неразрешимы ни при каком разносе по времени.
т.е. переходя к сигналу в виде
немодулированного гармонического колебания, можно получить ДН в виде полосы,
вытянутой вдоль оси х. При этом сигналы с какой угодно отличной от нуля
частотной расстройкой разрешаются без затруднений, тогда как копии сигнала с
совпадающими частотами неразрешимы ни при каком разносе по времени.
Противоречивость показателей
разрешения по и F характерна для всех простых сигналов. В основе ее лежит
инвариантность к виду сигнала объема V тела неопределенности, т.е. тела,
заключенного между плоскостью  и поверхностью, описываемой квадратом ФН
и поверхностью, описываемой квадратом ФН  Соответствующее утверждение, известное
Соответствующее утверждение, известное

Таким образом, тело
неопределенности имеет единичный объем независимо от конкретного закона
модуляции сигнала. Можно представить тело неопределенности как некую массу
пластилина, которой, выбирая сигнал, можно придавать различные конфигурации,
но из которой нельзя удалить даже одной молекулы.
Из соотношения (4.42) можно сделать
важные выводы, если учесть, что объем тела неопределенности сигнала, имеющего
длительность  и ширину спектра
и ширину спектра  , обязательно сосредоточен в пределах
прямоугольника, длины сторон которого по осям
, обязательно сосредоточен в пределах
прямоугольника, длины сторон которого по осям  и F равны
и F равны  Действительно, из формулы (4.40) следует,
что ФН
Действительно, из формулы (4.40) следует,
что ФН  обращается в нуль, когда
обращается в нуль, когда  не перекрываются по времени, т.е. когда
не перекрываются по времени, т.е. когда  . Воспользовавшись в формуле (4.40) равенством Парсеваля
. Воспользовавшись в формуле (4.40) равенством Парсеваля

нетрудно убедиться в равенстве нулю
 и при частотных расстройках, больших по абсолютному значению
и при частотных расстройках, больших по абсолютному значению
 при этом не перекрываются по частоте спектры
при этом не перекрываются по частоте спектры 
Возвращаясь к вопросу о
предпочтительной форме частотно- временной ФН (о предпочтительном теле
неопределенности), можно утверждать, что для получения хорошей разрешающей
способности по  тело неопределенности должно иметь пик в начале координат
(основной пик) по возможности малого объема
тело неопределенности должно иметь пик в начале координат
(основной пик) по возможности малого объема  Оставшийся объем
Оставшийся объем  приходящийся на боковые лепестки, для минимизации уровня
последних следует распределить как можно более равномерным слоем по
прямоугольнику со сторонами
приходящийся на боковые лепестки, для минимизации уровня
последних следует распределить как можно более равномерным слоем по
прямоугольнику со сторонами  . Таким образом, идеальная ФН должна иметь «кнопочный» вид:
наподобие иголки единичной высоты на прямоугольном пьедестале площадью
. Таким образом, идеальная ФН должна иметь «кнопочный» вид:
наподобие иголки единичной высоты на прямоугольном пьедестале площадью  (рис. 4.13).
(рис. 4.13).
Для простых сигналов  , так что площадь всего прямоугольника, в пределах которого
сосредоточено тело неопределенности, имеет порядок единицы. Но тот же порядок
имеет и площадь области высокой корреляции простого сигнала, так как ее
размеры по осям
, так что площадь всего прямоугольника, в пределах которого
сосредоточено тело неопределенности, имеет порядок единицы. Но тот же порядок
имеет и площадь области высокой корреляции простого сигнала, так как ее
размеры по осям  близки к
близки к  (см. рис. 4.13). Следовательно, для
простых сигналов почти весь объем тела неопределенности сосредоточен в области
высокой корреляции и вытеснить оттуда существенную часть полного объема V= 1 не удается. Никакой
«иглы» на пьедестале при этом не получается (см. рис. 4.12), а невозможность
вытеснить объем из области высокой корреляции приведет к тому, что сплющивайие
ФН по одной из осей будет сопровождаться неминуемым расширением ее по другой.
Это и является причиной обратной зависимости между показателями разрешающей
способности по , свойственной простым
сигналам.
(см. рис. 4.13). Следовательно, для
простых сигналов почти весь объем тела неопределенности сосредоточен в области
высокой корреляции и вытеснить оттуда существенную часть полного объема V= 1 не удается. Никакой
«иглы» на пьедестале при этом не получается (см. рис. 4.12), а невозможность
вытеснить объем из области высокой корреляции приведет к тому, что сплющивайие
ФН по одной из осей будет сопровождаться неминуемым расширением ее по другой.
Это и является причиной обратной зависимости между показателями разрешающей
способности по , свойственной простым
сигналам.
Теперь понятно, что приближение к
идеальной форме ФН, наподобие изображенной на рис. 4.13, возможно лишь в классе
сложных сигналов. Действительно, для таких сигналов характерна малая по
сравнению с длительностью сигнала  длительность корреляционной функции
длительность корреляционной функции  , т.е. длина отрезка оси х внутри области высокой корреляции
, т.е. длина отрезка оси х внутри области высокой корреляции
 Длина же отрезка оси F в пределах той же области — ширина спектра квадрата действительной
огибающей
Длина же отрезка оси F в пределах той же области — ширина спектра квадрата действительной
огибающей  — для сложных сигналов та же, что и для простых,
— для сложных сигналов та же, что и для простых,  . Таким образом, если площадь области высокой корреляции
близка к произведению длин указанных отрезков, т.е. к
. Таким образом, если площадь области высокой корреляции
близка к произведению длин указанных отрезков, т.е. к  то объем основного пика (его высота равна единице, а площадь
основания близка к площади высокой корреляции)
то объем основного пика (его высота равна единице, а площадь
основания близка к площади высокой корреляции)  При базе
При базе  составит малую долю полного объема V =
1 и последний практически весь
придется на пьедестал, площадь которого
составит малую долю полного объема V =
1 и последний практически весь
придется на пьедестал, площадь которого  значительно больше единицы. Средний квадрат
боковых лепестков ФН можно найти, разделив объем пьедестала
значительно больше единицы. Средний квадрат
боковых лепестков ФН можно найти, разделив объем пьедестала
 на площадь его основания. Это основано на том, что наши
предыдущие рассуждения были связаны с телом неопределенности, которое в свою
очередь связано с ФН квадратичной зависимостью. Так как
на площадь его основания. Это основано на том, что наши
предыдущие рассуждения были связаны с телом неопределенности, которое в свою
очередь связано с ФН квадратичной зависимостью. Так как  то среднеквадратический уровень
то среднеквадратический уровень
боковых лепестков  примерно равен
примерно равен  т.е. уменьшения боковых лепестков
частотно-временной ФН можно добиться только за счет увеличения базы сигнала.
т.е. уменьшения боковых лепестков
частотно-временной ФН можно добиться только за счет увеличения базы сигнала.
Отыскание конкретных законов
модуляции, отвечающих приемлемым ФН, составляет предмет серьезной
самостоятельной задачи, и само по себе большое значение базы веще не
гарантирует близости  к идеальной. Так, если обратиться к ЛЧM сигналам, то выяснится, что для них имеет вид не иглы на
пьедестале, а узкого длинного гребня, повернутого относительно осей
к идеальной. Так, если обратиться к ЛЧM сигналам, то выяснится, что для них имеет вид не иглы на
пьедестале, а узкого длинного гребня, повернутого относительно осей  , F. Это подтверждает и диаграмма неопределенности такого сигнала
(рис. 4.14), вытянутая вдоль прямой
, F. Это подтверждает и диаграмма неопределенности такого сигнала
(рис. 4.14), вытянутая вдоль прямой  Отрезки осей
Отрезки осей  пределах этой области имеют длины
пределах этой области имеют длины  . Таким образом, надлежащим выбором девиации
. Таким образом, надлежащим выбором девиации  (ширины спектра) и длительности Тс можно добиться высокой разрешающей
способности по времени запаздывания (при нулевой взаимной частотной расстройке
интерферирующих сигналов) или по частоте (интерферирующие копии полностью
совмещены по времени). В то же время, какими бы ни были значения
(ширины спектра) и длительности Тс можно добиться высокой разрешающей
способности по времени запаздывания (при нулевой взаимной частотной расстройке
интерферирующих сигналов) или по частоте (интерферирующие копии полностью
совмещены по времени). В то же время, какими бы ни были значения  , копии сигнала, сдвинутые по
, копии сигнала, сдвинутые по  будут, как видно на рис. 4.14, иметь столь высокую
корреляцию, что их следует считать практически неразрешимыми.
будут, как видно на рис. 4.14, иметь столь высокую
корреляцию, что их следует считать практически неразрешимыми.
Более похожую на «кнопочную» ФН
имеют многие фазоманипулированные сигналы. Для них область высокой корреляции,
как и для простых сигналов, симметрична относительно осей  однако размер ее вдоль оси
однако размер ее вдоль оси  примерно в
примерно в  раз меньше
раз меньше  Поэтому, выбрав
Поэтому, выбрав  достаточно большими, основному пику всегда можно придать
иглообразную форму. При этом, однако, вместо изображенного на рис. 4.13
«гладкого»
достаточно большими, основному пику всегда можно придать
иглообразную форму. При этом, однако, вместо изображенного на рис. 4.13
«гладкого»
пьедестала высоты  вне основного пика ока
вне основного пика ока
зываются хаотически расставленными
острые боковые пики, отдельные из которых могут иметь уровни, заметно
превосходящие 
4.6. РЛС со ступенчатым изменением частоты
При распознавании объектов,
протяженных по дальности, необходимо воспроизвести зависимость амплитуды и
фазы отраженных от цели сигналов от их временной задержки (дальности). При этом
вводится понятие «профиля» цели по дальности. Такой профиль может быть получен
при облучении цели серией коротких импульсов с фиксированной частотой
повторения. Если серия радиоимпульсов будет передаваться с последовательным
смещением частоты в пределах полосы  то с помощью последующего дискретного преобразования Фурье
можно воспроизвести профиль цели с разрешением, определяемым полосой
то с помощью последующего дискретного преобразования Фурье
можно воспроизвести профиль цели с разрешением, определяемым полосой  что эквивалентно
облучению цели короткими импульсами длительностью
что эквивалентно
облучению цели короткими импульсами длительностью 
Эквивалентный результат может быть
получен использованием серий относительно узкополосных импульсов со смещенными
частотами, в сумме перекрывающими полосу частот , необходимую для получения заданного
разрешения по дальности  При этом, конечно, должно быть
обеспечено когерентное суммирование с сохранением амплитуд и фаз частотных
составляющих сигнала.
При этом, конечно, должно быть
обеспечено когерентное суммирование с сохранением амплитуд и фаз частотных
составляющих сигнала.
Такой способ формирования «профиля»
позволяет избежать трудностей при компрессии импульсов, связанных с формированием
и обработкой сверхширокополосных сигналов, тем более что очень широкая полоса
необходима только для разрешения и распознавания объектов и не требуется для их
обнаружения и определения угловых координат. Процесс получения «профиля» цели
по дальности синтезированием серий узкополосных отраженных импульсов включает в
себя следующие стадии.
Формируются и изучаются пачки из N
узкополосных радиоимпульсов со смещением частот соседних импульсов на шаг  При этом формируются и запоминаются квадратурные опорные
сигналы I и Q для каждого излучаемого импульса.
При этом формируются и запоминаются квадратурные опорные
сигналы I и Q для каждого излучаемого импульса.
При приеме выделяются квадратурные
компоненты всех N импульсов пачки
отраженных сигналов, затем формируется эквивалентное дискретное спектральное
распределение (сигнатура).
После внесения поправок путем
взвешивания пачки данных в зависимости от скорости цели, фазовых и амплитудных
флукту- аций применяется обратное дискретное преобразование Фурье (ДПФ),
позволяющее получить «профиль» цели по дальности для каждой пачки импульсов с
разрешением по дальности  , определяемым результирующей полосой пачки радиоимпульсов
, определяемым результирующей полосой пачки радиоимпульсов
 . Таким образом, метод ступенчатого изменения частоты
снимает требования формирования сигнала с очень широкой полосой и высокой
скоростью взятия выборок сигнала.
. Таким образом, метод ступенчатого изменения частоты
снимает требования формирования сигнала с очень широкой полосой и высокой
скоростью взятия выборок сигнала.
Упрощенная структурная схема РЛС,
представленная на рис. 4.15, поясняет, как осуществляется формирование и
обработка пачек радиоимпульсов со смещением частоты в соответствии с приведенными
ранее этапами формирования и обработки сигнала. Схема не требует подробных
комментариев. Заметим только, что задержка  необходима для синхронизации выборок квадратурных
составляющих I и Q сигнала в соответствии с синтезируемым интервалом
дальности.
необходима для синхронизации выборок квадратурных
составляющих I и Q сигнала в соответствии с синтезируемым интервалом
дальности.
После аналого-цифрового
преобразования выборок они суммируются, запоминаются и подвергаются обратному
ДПФ, после которого формируются отклики на принимаемые сигналы Y(t)
вида  Можно показать, что эти отклики
эквивалентны реакции СФ при обработке дискретно-кодированного сигнала с
полосой
Можно показать, что эти отклики
эквивалентны реакции СФ при обработке дискретно-кодированного сигнала с
полосой  . Таким образом, на
выходе формируются импульсы с огибающей
. Таким образом, на
выходе формируются импульсы с огибающей  длительностью на уровне
длительностью на уровне 


Рассмотренный пример еще раз
подтверждает широкие возможности ЧМ сигналов для получения радиолокационных
изображений высокой четкости.
Для более глубокого освоение
материала гл. 4 рекомендуем воспользоваться учебным пособием*.
Контрольные вопросы
1.Какой смысл вкладывается в
понятие ФН?
2.Можно ли повысить точность оценки
времени запаздывания, увеличивая центральную частоту радиосигнала?
3.Покажите, что для сигналов с
симметричной амплитудно-частотной модуляцией ошибки совместных оценок времени
запаздывания и частоты при  независимы.
независимы.
4.В чем суть понятий «разрешение
сигналов» и «разрешающая способность»?
5.Объясните связь разрешающей
способности по параметру  с видом ФН
с видом ФН 
6.Можно ли увеличить разрешающую
способность по времени запаздывания, применяя несогласованные фильтры, дающие
более короткие отклики на сигнал, чем согласованный фильтр?
7.Каковы преимущества сложных сигналов
по сравнению с простыми в задачах разрешения по времени запаздывания?
8.Чем определяется разрешающая
способность по частоте?
9.Дайте объяснение близости
амплитудно-частотного спектра ЛЧМ сигнала при 
к прямоугольному.
10.Почему в классе сложных сигналов
достижимы показатели совместного разрешения по времени запаздывания и частоте,
недоступные для простых сигналов?
11.Как связана разрешающая
способность по  с базой сигнала?
с базой сигнала?
12.Какова длительность основного
лепестка сжатого импульса на выходе фильтра сжатия, если на его вход подается
32-разрядная последовательность примыкающих ФМ импульсов общей длительностью 5
мкс? Какое разрешение по дальности при этом возможно?
13.РЛС со ступенчатым изменением
частоты должна воспроизводить «профиль» корабля по дальности протяженностью 200 м с разрешением 2 м. Каково должно быть минимальное число импульсов в пачке и каково значение
шага изменения частоты для обеспечения требуемого разрешения по дальности?
14.Допплеровский прибор определения
скорости приближающегося автомобиля работает на волне 3 см. Определите время наблюдения, необходимое для определения скорости с точностью 3,6 км/ч при отношении сигнала к шуму 15 дБ. Какой путь пройдет автомобиль, движущийся со скоростью 60 км/ч, за это время?
15.PЛC обнаружения ракет  излучает ЛЧМ импульсы длительностью 1 мс
с девиацией частоты 200 МГц. Какова будет погрешность измерения дальности
из-за допплеровского сдвига частоты, если радиальная скорость приближающейся
ракеты
излучает ЛЧМ импульсы длительностью 1 мс
с девиацией частоты 200 МГц. Какова будет погрешность измерения дальности
из-за допплеровского сдвига частоты, если радиальная скорость приближающейся
ракеты  ?
?
16.Объясните, каким образом линия
задержки с отводами, используемая для генерации сигнала РЛС, модулированного
кодом Баркера, может быть использована в качестве сжимающего фильтра при
приеме отраженного сигнала.
ПОИСК СИГНАЛОВ В РАДИОЛОКАЦИОННЫХ И
РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ
5.1. Поиск по угловым координатам,
дальности и скорости
Поиск сигналов в радиолокационных и
радионавигационных системах предшествует режиму точного измерения их параметров,
несущих информацию о координатах и скорости объектов. В случае РНС обычно
заранее известно расположение опорных станций (радиомаяков) системы, поэтому
на борту объекта, определяющего свое место, как правило, нет необходимости
выяснять, присутствует ли сигнал того или иного маяка, и поиск сводится к
грубому определению радионавигационного параметра (РНП). Эта особенность
отличает поиск сигналов в РНС от поиска сигналов радиолокационной цели, о
наличии которой в зоне обзора в большинстве практических случаев неизвестно. В
связи с этим целесообразно сначала рассмотреть общий случай РЛС, осуществляющей
поиск сигнала в рабочей зоне, называемой в радиолокации зоной, или сектором,
обзора.
Размеры рабочей зоны определяются
предельными значениями измеряемых координат и скорости объекта, т.е. дальности
 и радиальной
скорости
и радиальной
скорости  . Протяженность каждого из этих интервалов удобно представить
числом содержащихся в нем элементов разрешения по дальности
. Протяженность каждого из этих интервалов удобно представить
числом содержащихся в нем элементов разрешения по дальности  углу места
углу места 
В процессе обзора осуществляется
проверка наличия цели в каждом из элементов разрешения, причем
последовательность обзора задается методом (программой) обзора, выбор которого
определяется назначением РЛС. Станции обнаружения работают в режиме
непрерывного обзора, в процессе которого производится не только обнаружение,
но и измерение координат обнаруженных целей. В станциях точного измерения
координат обзор прекращается при обнаружении цели, затем станция переводится в
режим точного измерения координат цели.
При выборе способа обзора PJ1C учитываются размеры ее рабочей зоны, определяемые
координаты и точность их измерения, разрешающая способность станции по
дальности, скорости и угловым координатам, требуемое время обзора рабочей
зоны, вероятность появления цели в различных участках рабочей зоны, затраты
при технической реализации того или иного способа, его эксплутационная
надежность.
Главными параметрами,
характеризующими эффективность выбранного метода обзора, являются среднее время
до обнаружения цели с заданной вероятностью и среднее время между соседними
ложными обнаружениями (средняя частота ложных тревог).
Обзор элементов рабочей зоны РЛС
может производиться последовательно по времени (последовательный обзор) или
одновременно (параллельный, или одновременный, обзор). Применяется также
комбинированный параллельно-последовательный метод обзора. При параллельном
обзоре обработка сигналов может производиться одновременно во всех элементах
разрешения зоны обзора, поэтому обнаружение цели происходит сразу же при ее
появлении в зоне обзора РЛС. Однако малое время обзора при параллельном
способе достигается существенным усложнением оборудования, поэтому при
допустимости увеличения времени обзора рабочей зоны РЛС используются более
простые в реализации методы последовательного и
параллельно-последовательного
обзора.
Обзор рабочей зоны по дальности  происходит в процессе распространения сигнала до цели и
обратно. При расположении цели на максимальной дальности
происходит в процессе распространения сигнала до цели и
обратно. При расположении цели на максимальной дальности  время от излучения до приема отраженного сигнала равно
время от излучения до приема отраженного сигнала равно  — скорость распространения радиоволн. За это время
происходит последовательный просмотр всех элементов разрешения по дальности,
соответствующих определенному положению ДНА станции. Обработка сигналов,
соответствующих всем ND элементам разрешения, за время
— скорость распространения радиоволн. За это время
происходит последовательный просмотр всех элементов разрешения по дальности,
соответствующих определенному положению ДНА станции. Обработка сигналов,
соответствующих всем ND элементам разрешения, за время  требует создания сложной
требует создания сложной  -канальной системы обработки, что не
всегда целесообразно, поэтому чаще используют значительно меньшее число каналов
обработки
-канальной системы обработки, что не
всегда целесообразно, поэтому чаще используют значительно меньшее число каналов
обработки
к < ND. Такая параллельно-последовательная обработка сигналов естественно
связана с энергетическими потерями, увеличивающимися с ростом отношения ND/к. Таким образом,
снижение аппаратурных затрат приводит к ухудшению качественных показателей
системы, и при ее проектировании задача заключается в отыскании наилучшего
решения с учетом всех существенных факторов.
Выбор числа каналов обработки к
будет обсужден при рассмотрении поиска сигналов в РНС, которые в силу большой
дальности действия могут иметь весьма большие значения ND, и задача рационального выбора значения к
в этом случае особенно актуальна.
Проще решается задача поиска
сигнала цели по дальности в обзорных PJIC, имеющих на выходе индикаторное устройство
на ЭЛТ. Благодаря послесвечению экрана отметки всех целей на данном
направлении в пределах дальностей от Dmin до Dmax воспроизводятся на
линии развертки дальности (при выборе соответствующей шкалы дальности). При
этом происходит и накопление сигналов пачки импульсов, принимаемых за время
нахождения цели в пределах ширины сканирующей ДНА. Таким образом, элементы
(точки) линейной развертки ЭЛТ являются ячейками памяти и накопления
(суммирования). Именно так происходит поиск целей в РЛС кругового обзора,
принцип действия которой рассматривался ранее. В современных РЛС с цифровой
обработкой сигналов это свойство ЭЛТ реализуется за счет применения специально
организованной памяти, состоящей из ячеек с накоплением оцифрованных отсчетов,
соответствующих отраженным с определенных дистанций сигналам.
Обзор рабочей зоны по радиальной
скорости становится необходимым, если ширина спектра сигнала  меньше диапазона
возможных изменений допплеровского смещения частоты:
меньше диапазона
возможных изменений допплеровского смещения частоты: 
В этом случае в системе обработки
сигналов должно быть предусмотрено
 частотных каналов (фильтров) при одновременной обработке
или один перестраиваемый в диапазоне
частотных каналов (фильтров) при одновременной обработке
или один перестраиваемый в диапазоне  фильтр с полосой пропускания не шире
требуемого разрешаемого интервала по частоте
фильтр с полосой пропускания не шире
требуемого разрешаемого интервала по частоте  при последовательном обзоре. Последовательный обзор по
скорости также связан с энергетическими потерями и может быть использован при
сильных сигналах, например в системах с активным ответом.
при последовательном обзоре. Последовательный обзор по
скорости также связан с энергетическими потерями и может быть использован при
сильных сигналах, например в системах с активным ответом.
Обзор рабочей зоны по угловым
координатам также может быть параллельным, последовательным или
параллельно-последовательным. При параллельном обзоре PJIC должна иметь  угловых каналов, т.е.
угловых каналов, т.е.  -лучевую ДНА, перекрывающую всю зону обзора с
соответствующим числом приемных каналов. Если заданный сектор обзора не очень
широк, то при излучении может быть использована однолучевая ДНА, перекрывающая
весь сектор, однако это приведет к снижению усиления передающей антенны и
энергопотенциала PJIC в целом.
-лучевую ДНА, перекрывающую всю зону обзора с
соответствующим числом приемных каналов. Если заданный сектор обзора не очень
широк, то при излучении может быть использована однолучевая ДНА, перекрывающая
весь сектор, однако это приведет к снижению усиления передающей антенны и
энергопотенциала PJIC в целом.
Если заданы широкий сектор обзора и
высокая разрешающая способность по угловым координатам, то требуемое число
лучей и каналов обработки становится слишком большим, а система трудно
осуществимой. В этом случае используют последовательный одноканальный или
параллельно-последовательный метод обзора со сканированием (развертыванием)
луча во всей зоне обзора. Последовательный обзор проще и дешевле реализуется,
однако не всегда приемлем изза низкого темпа поступления информации, поскольку
скорость обзора ограничена временем  в течение которого ДНА должна быть направлена
на объект для того, чтобы принять хотя бы один отраженный целью сигнал. Таким
образом, время однократного обзора всей зоны Т0 обзора должно соответствовать условию
в течение которого ДНА должна быть направлена
на объект для того, чтобы принять хотя бы один отраженный целью сигнал. Таким
образом, время однократного обзора всей зоны Т0 обзора должно соответствовать условию

Для обнаружения слабых сигналов
(например, от целей, расположенных на расстояниях, близких к  ) требуется их накопление, что ведет к необходимости
снижения скорости обзора. Так, если в импульсной PЛC для обнаружения цели требуется накопление N импульсов, то
соответственно время обзора возрастает в N раз, поскольку период повторения
излучаемых импульсов Тп задан
условием однозначного измерения дальности
) требуется их накопление, что ведет к необходимости
снижения скорости обзора. Так, если в импульсной PЛC для обнаружения цели требуется накопление N импульсов, то
соответственно время обзора возрастает в N раз, поскольку период повторения
излучаемых импульсов Тп задан
условием однозначного измерения дальности 
Эти ограничения могут быть смягчены
при переходе от равномерного обзора к программируемому заранее на основе
априорных данных (например, о вероятности появления цели на том или ином
направлении) или к адаптивному. При адаптивном последовательном обзоре на
основе результатов обзора на предшествующих этапах изменяется очередность или
время анализа различных элементов рабочей зоны, или энергия, излучаемая в том
или другом направлении. Управление параметрами обзора осуществляется анализатором,
выявляющим направления наиболее вероятного наличия цели. Реализация
управляемого обзора возможна при использовании ФАР в сочетании с цифровым
процессором.
При параллельном обзоре адаптация
сводится к автоматическому увеличению энергии излучения РЛС, если при работе в
нормальном (дежурном) режиме появилось подозрение на наличие цели в рабочей
зоне РЛС.
5.2. Методы последовательного обзора
пространства
Наиболее часто в РЛС используется
последовательный однока- нальный обзор, при котором единственная ДНА отклоняется
в пределах заданного сектора (зоны) обзора. Такое отклонение (сканирование)
ДНА может осуществляться различными способами, которые носят название методов
обзора пространства. Во многих "ЛС определение координат осуществляется
непосредственно в процессе обзора, поэтому выбор способа и параметров обзора оказывается
связанным с основными тактическими и техническими характеристиками системы.
Время обзора заданного сектора. Время обзора является основным
параметром в режиме поиска цели и тесно связано с необходимыми дальностью
действия, точностью и разрешающей способностью системы. Обеспечение большой
дальности действия при ограничении энергии излучаемого сигнала и
чувствительности приемного устройства возможно лишь за счет сужения ДНА. Повышение
угловой разрешающей способности и точности системы также связано с применением
узких диаграмм, а сужение ДНА приводит к увеличению времени Т0, необходимого для обзора заданного
объема пространства, что непосредственно вытекает из формулы (5.1).
Обозначим величину сектора обзора в
горизонтальной плоскости (по азимуту)  в вертикальной" плоскости (по углу
места)
в вертикальной" плоскости (по углу
места)  , а ширину ДНА в
точках половинной мощности соответственно
, а ширину ДНА в
точках половинной мощности соответственно . Имея в виду, что
. Имея в виду, что  , а
, а  запишем формулу (5.1) в виде
запишем формулу (5.1) в виде
Если для надежного обнаружения, а также
для определения координат цели в процессе обзора, необходимо принять не один, а
N сигнальных импульсов в пределах ДНА, то скорость ее
отклонения должна быть снижена в N раз и время обзора соответственно
увеличится до
 При этом предполагается, что диаграммы перемешаются равномерно
и каждый элемент сектора обзора находится в равных условиях.
При этом предполагается, что диаграммы перемешаются равномерно
и каждый элемент сектора обзора находится в равных условиях.
Далее рассматриваются методы
равномерного обзора пространства, получившие наибольшее распространение:
круговой, секторный, винтовой, спиральный и конический. Методы обзора в двух
плоскостях иногда обобщенно называются растровыми.
Круговой и секторный обзоры. При круговом обзоре ширина ДНА в
вертикальной плоскости  полностью перекрывает заданный сектор
полностью перекрывает заданный сектор . При вращении ДНА в горизонтальной плоскости (вокруг вертикальной
оси) осуществляется последовательный обзор сектора
. При вращении ДНА в горизонтальной плоскости (вокруг вертикальной
оси) осуществляется последовательный обзор сектора  т.е. круговой обзор. Если сектор обзора
т.е. круговой обзор. Если сектор обзора  , то обзор называется секторным.
, то обзор называется секторным.
Время (период) обзора при круговом
обзоре равно  а при секторном
а при секторном  — угловая скорость сканирования луча; кс — коэффициент, учитывающий потери времени
при изменении направления отклонения ДНА (ее холостой ход).
— угловая скорость сканирования луча; кс — коэффициент, учитывающий потери времени
при изменении направления отклонения ДНА (ее холостой ход).
Таким образом, для характеристики
обзора необходимо определить угловую скорость  . Если ДНА имеет ширину
. Если ДНА имеет ширину  , а число импульсов, принимаемых за время поворота ДНА на
угол аА, должно быть равно N, то
, а число импульсов, принимаемых за время поворота ДНА на
угол аА, должно быть равно N, то
Полученные формулы (5.3)...(5.5)
показывают, что уменьшение времени обзора заданного сектора возможно за счет
увеличения  Однако эти параметры определяются требованиями разрешающей
способности, точности и однозначности измерения, поэтому их выбор должен
производиться с учетом всех остальных (зачастую противоречивых) требований к
РЛС.
Однако эти параметры определяются требованиями разрешающей
способности, точности и однозначности измерения, поэтому их выбор должен
производиться с учетом всех остальных (зачастую противоречивых) требований к
РЛС.
При использовании единственной ДНА
в одноканальной системе при круговом или секторном обзоре определяются две координаты:
дальность и азимут, и станции называются двухкоординатными. В таких станциях
радиолокационное наблюдение (обнаружение и измерение координат цели) может
осуществляться с помощью индикаторов кругового обзора (или секторных), подключенных
непосредственно к выходу приемника РЛС или после устройств цифровой обработки
сигнала с последующим отображением координат цели.
При необходимости измерения третьей
координаты цели — угла места (3 — применяются рассматриваемые далее методы
обзора.
Винтовой обзор. При винтовом обзоре
каждая точка ДНА (точка О на рис. 5.1) описывает линию, близкую к винтовой.
Движение диаграммы представляет собой комбинацию кругового вращения по
азимуту с угловой скоростью  и постепенного подъема
и постепенного подъема

по углу места со скоростью  . Обратный ход по углу места может осуществляться быстрее.
. Обратный ход по углу места может осуществляться быстрее.
При винтовом обзоре важно не только
согласование скорости вращения с частотой повторения импульсов Fп и шириной ДНА  , но и обеспечение перекрытия диаграмм на
смежных витках при отклонении по углу места. Для исключения возможности
пропуска целей практически обеспечивается двойное перекрытие, т.е. при ширине
ДНА в вертикальной плоскости
, но и обеспечение перекрытия диаграмм на
смежных витках при отклонении по углу места. Для исключения возможности
пропуска целей практически обеспечивается двойное перекрытие, т.е. при ширине
ДНА в вертикальной плоскости  за один оборот антенны по азимуту
диаграмма смещается по углу на
за один оборот антенны по азимуту
диаграмма смещается по углу на
 . Так как один оборот ДНА по азимуту совершается за время
. Так как один оборот ДНА по азимуту совершается за время  то скорость ее отклонения по углу места с учетом двойного
перекрытия должна быть
то скорость ее отклонения по углу места с учетом двойного
перекрытия должна быть
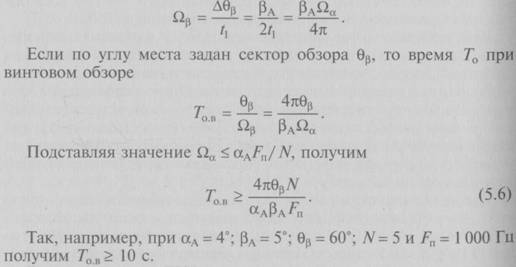
При более узкой ДНА время обзора
будет еще больше. Таким образом, при узких диаграммах и достаточно большом
секторе обзора информация о цели будет поступать с большой
дискретностью, что приводит к ряду
недостатков и, в первую очередь, к снижению точности определения параметров
движения цели.
Спиральный метод обзора. Этот
метод, так же как и винтовой, представляет собой комбинацию вращения диаграммы
с одновременным изменением угла у между осью вращения и осью диаграммы (рис.
5.2). Различие заключается в величине угла у: при винтовом обзоре 
Пусть  — сектор обзора в горизонтальной и вертикальной плоскостях;
— сектор обзора в горизонтальной и вертикальной плоскостях;
 — угловая скорость вращения вдоль витка спирали;
— угловая скорость вращения вдоль витка спирали;  — угловая скорость отклонения от оси вращения.
— угловая скорость отклонения от оси вращения.
Считая по-прежнему перекрытие
витков спирали двойным, запишем

Конический обзор является частным
случаем спирального. Угол у обычно не превышает величины  и, следовательно, сектор обзора равен
и, следовательно, сектор обзора равен 
Обзор заданного сектора осуществляется
здесь за один оборот ДНА, поэтому

Коническое сканирование чаще всего
используется в режиме точного и автоматического измерений угловых координат
цели равносигнальным методом (при автоматическом сопровождении цели).
В некоторых типах РЛС находят применение
методы обзора с более сложными движениями диаграмм и, в частности, являющиеся
комбинацией рассмотренных. Находит применение растровый обзор, при котором ДНА
отклоняется, как луч в кинескопе телевизора при образовании строчной развертки,
поэтому такой способ обзора носит название строчного (растрового), или
зигзагообразного (рис. 5.3). Время обзора в этом случае можно найти по формуле

Управление движением ДНА при
больших углах сканирования чаще всего осуществляется механическим качанием или
вращением всей антенной системы, а сканирование в небольших пределах
производится качанием или вращением (например, при коническом обзоре)
облучателя или рефлектора антенной системы. При механических методах
сканирования моменты инерции антенных устройств часто являются факторами,
ограничивающими возможность увеличения скорости обзора, поэтому все большее
применение находят электрические методы сканирования и их комбинации с
механическими. 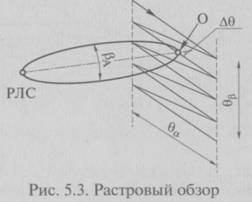
Однако при одноканальном обзоре
время обзора ограничено условием (5.2) независимо от метода обзора и его
технической реализации.
Радикального повышения скорости
обзора можно достигнуть лишь при использовании многоканальных методов обзора в
сочетании с электрическим управлением сканированием ДНА, которое открывает также
путь к реализации программируемого и адаптивного обзора.
5.3. Многоканальный и управляемый обзор
пространства
Сочетание высокой точности и
разрешающей способности с большой дальностью и малым временем обзора особенно
актуально для трехкоординатных РЛС кругового обзора. В ряде современных
обзорных РЛС эта задача решается комбинацией параллельного многоканального
обзора по углу места с последовательным обзором по азимуту. В такой станции
антенна формирует ДН, содержащую несколько лепестков шириной  , перекрывающих весь заданный сектор обзора по углу места
, перекрывающих весь заданный сектор обзора по углу места  . Необходимое число лепестков при этом должно быть
. Необходимое число лепестков при этом должно быть

а ширина ДНА выбирается исходя из требований к точности и разрешающей
способности РЛС по углу места. Необходимое число лепестков, смещенных по углу
места, может быть сформировано применением соответствующего числа облучателей,
смещенных относительно фокуса параболического зеркала, формирующего ДНА с
заданными параметрами. Для этой цели может быть использована также антенная
система в виде плоской антенной решетки, формирующей заданную ДНА.
При использовании антенной решетки
сканирование по углу места может быть обеспечено переключением несущей частоты
излучаемых колебаний (частотное сканирование). При этом создается  смещенных по углу места и перекрывающихся лепестков ДНА
(рис. 5.4), соответственно отраженные сигналы обрабатываются в приемных каналах,
настроенных на соответствующие несущие частоты.
смещенных по углу места и перекрывающихся лепестков ДНА
(рис. 5.4), соответственно отраженные сигналы обрабатываются в приемных каналах,
настроенных на соответствующие несущие частоты.
При вращении антенной системы по
азимуту осуществляется круговой обзор, время которого То.к, вычисляемое по формуле (5.4), и
определяет темп обновления информации РЛС.
Недостатком многолучевой РЛС с
частотным сканированием является то, что получаемая информация содержится в
частотных
 и временных параметрах сигнала. Для устранения этого
недостатка используются две антенны: основная, осуществляющая круговой обзор
всего заданного сектора и обнаружение цели на больших дальностях, и
дополнительная в виде антенной решетки, формирующей ДНА, которая при
частотном сканировании производит обзор данного сектора по углу места.
Диаграмма антенной решетки смещена по азимуту относительно ДН основной
антенны на 180°, поэтому информация о дальности и азимуте цели, получаемая по
основному каналу, используется в качестве априорной для включения и
соответствующей настройки канала измерения угла места цели.
и временных параметрах сигнала. Для устранения этого
недостатка используются две антенны: основная, осуществляющая круговой обзор
всего заданного сектора и обнаружение цели на больших дальностях, и
дополнительная в виде антенной решетки, формирующей ДНА, которая при
частотном сканировании производит обзор данного сектора по углу места.
Диаграмма антенной решетки смещена по азимуту относительно ДН основной
антенны на 180°, поэтому информация о дальности и азимуте цели, получаемая по
основному каналу, используется в качестве априорной для включения и
соответствующей настройки канала измерения угла места цели.
Для извлечения информации об угле
места принятый сигнал в такой станции переносится на промежуточную частоту и
обрабатывается в каналах приемника, число которых соответствует числу лучей  ДНА угломерного канала. Так, в одной из РЛС при
ДНА угломерного канала. Так, в одной из РЛС при  и
и  применено 24 канала приемника
применено 24 канала приемника  перекрывающих диапазон изменения несущей частоты
излучаемого сигнала. Плоские антенные решетки имеют сектор сканирования не более
120°. Большие зоны обзора можно получить объединением нескольких плоских
решеток или применением круговой решетки, в которой излучатели устанавливаются
перед электрическим рефлектором и запитываются высокочастотным напряжением с
определенными фазовыми сдвигами.
перекрывающих диапазон изменения несущей частоты
излучаемого сигнала. Плоские антенные решетки имеют сектор сканирования не более
120°. Большие зоны обзора можно получить объединением нескольких плоских
решеток или применением круговой решетки, в которой излучатели устанавливаются
перед электрическим рефлектором и запитываются высокочастотным напряжением с
определенными фазовыми сдвигами.
Вообще фазовое управление
положением ДНА открывает большие возможности, особенно при использовании
решеток с большим числом элементов (до нескольких тысяч) и фазовращателей,
управляемых ЭВМ.
В частности, с помощью ФАР можно
осуществлять более эффективный управляемый поиск цели, при котором очередность
просмотра различных направлений определяется в процессе обзора в зависимости
от результатов уже проведенных зондирований пространства.
Оптимальной принято называть такую
процедуру поиска, при которой обеспечивается минимальное среднее время поиска
цели  , (среднее время существования необнаруженной цели в зоне
обзора) с заданной достоверностью.
, (среднее время существования необнаруженной цели в зоне
обзора) с заданной достоверностью.
Оптимизация поиска цели
представляет сложную задачу даже для наиболее простого случая одноканальной
системы с заданной последовательностью перемещения ДНА. Предположим, что
однолучевая РЛС производит циклический обзор рабочей зоны, в одном из элементов
которой находится цель. ДНА перемещается скачками из одного положения в другое
по заданному закону. Число направлений в зоне обзора равно N, а число элементов разрешения по
дальности на каждом из направлений М. Время задержки луча в положении  , равно
, равно  априорная вероятность наличия цели в
элементе разрешения
априорная вероятность наличия цели в
элементе разрешения  равна pJh причем
равна pJh причем 

Если данные обработки в течение
интервала  , свидетельствуют о возможном наличии цели в элементе
, свидетельствуют о возможном наличии цели в элементе  то ДНА задерживается в положении
то ДНА задерживается в положении  , дополнительно на время
, дополнительно на время  , по истечении
которого принимается окончательное решение о наличии или отсутствии цели в
данном элементе разрешения.
, по истечении
которого принимается окончательное решение о наличии или отсутствии цели в
данном элементе разрешения.
При этих условиях необходимо
определить разумную очередность зондирования различных направлений зоны
поиска, сводящую к минимуму среднее время поиска

Среднее время обнаружения цели,
находящейся в элементе  равно
равно 
где  — среднее время, отсчитываемое от начала поиска до завершения
первого зондирования направления
— среднее время, отсчитываемое от начала поиска до завершения
первого зондирования направления  — среднее число зондирований направлений
— среднее число зондирований направлений  до обнаружения цели в элементе разрешения;
до обнаружения цели в элементе разрешения;  — среднее время между смежными зондированиями направления
— среднее время между смежными зондированиями направления  (средний период обзора), когда цель находится в элементе
(средний период обзора), когда цель находится в элементе 
Подставляя значение  в выражение (5.11), найдем
в выражение (5.11), найдем
иска необходимо выбрать такой
порядок зондирования направлений в секторе обзора, при котором эта сумма
минимальна.
Можно показать*, что минимум  обеспечивается, если
зондирование направлений происходит в порядке убывания величины
обеспечивается, если
зондирование направлений происходит в порядке убывания величины  — вероятность задержки ДНА на время
— вероятность задержки ДНА на время  в направлении
в направлении  . Однако при заданном заранее порядке
просмотра направлений в зоне обзора эта рекомендация может быть реализована
только в тех случаях, когда величина
. Однако при заданном заранее порядке
просмотра направлений в зоне обзора эта рекомендация может быть реализована
только в тех случаях, когда величина  изменяется при поиске монотонно от одной
границы зоны до другой или от центра зоны к ее периферии. Последнему случаю
соответствует поиск цели при спиральном сканировании ДНА.
изменяется при поиске монотонно от одной
границы зоны до другой или от центра зоны к ее периферии. Последнему случаю
соответствует поиск цели при спиральном сканировании ДНА.
Применение ФАР позволяет
осуществить полностью управляемый обзор, оптимизацией которого можно
существенно сократить среднее время поиска цели.
При адаптивном обзоре управление
обзором может осуществляться от двухпорогового последовательного обнаружителя,
в котором в каждом положении ДНА вычисляется сумма
 коэффициентов правдоподобия
коэффициентов правдоподобия  соответствующих элементу разрешения Si. Команда на перемещение ДНА в соседнее
положение дается при превышении
соответствующих элементу разрешения Si. Команда на перемещение ДНА в соседнее
положение дается при превышении  величины верхнего порога (что соответствует
фиксации наличия цели в Si,) или не достижении нижнего порога за определенное время
(отсутствие цели в Si).
величины верхнего порога (что соответствует
фиксации наличия цели в Si,) или не достижении нижнего порога за определенное время
(отсутствие цели в Si).
Можно использовать и другой
вариант, при котором ДНА перемещается при условии, если наибольший из
коэффициентов правдоподобия  окажется больше верхнего порога (при
этом фиксируется наличие цели в Si) или меньше нижнего порога, что означает отсутствие цели во
всех М элементах
разрешения по дальности на рассматриваемом направлении.
окажется больше верхнего порога (при
этом фиксируется наличие цели в Si) или меньше нижнего порога, что означает отсутствие цели во
всех М элементах
разрешения по дальности на рассматриваемом направлении.
Оба варианта примерно равноценны в
отношении сокращения времени поиска и могут быть реализованы лишь при практическом
безынерционном управлении положением ДНА, т.е. при применении ФАР и цифровых
методов обработки сигнала и управления обзором, которые кратко рассматриваются
далее.
Расчет времени поиска сигналов и
способа оптимизации поиска рассмотрены в подразд. 5.4 применительно к РНС
наземного базирования.
Управление положением диаграмм
направленности ФАР. В процессе обзора
пространства осуществляется отклонение (сканирование) ДНА во времени по
заданному закону. При этом обычно имеют в виду изменение положения главного
лепестка ДНА, который для сокращения обычно называют лучом антенны. ФАР
позволяет формировать и управлять положением нескольких лучей, что делает
возможным реализовать разнообразные методы обзора, в том числе и адаптивные при
наличии соответствующей схемы управления обзором (процессора управления обзором).
Применяется фазовое и частотное
управление положением луча ФАР.
В ФАР с фазовым управлением
отклонение формируемого луча достигается изменением сдвига фаз между соседними
элементами антенной решетки с помощью управляемых фазовращателей. На рис. 5.5
представлена линейная ФАР, имеющая 2п+ 1 излучателей
(N = 2п
+ 1), расположенных на
расстояниях l один от другого.
Излучатели питаются от передатчика высокочастотными колебаниями с длиной волны
 через фазовращатели, обеспечивающие сдвиг фаз между
соседними излучателями, равный
через фазовращатели, обеспечивающие сдвиг фаз между
соседними излучателями, равный 
Величина фазового сдвига ср устанавливается
сигналами от схемы управления обзором. Направление оси главного лепестка ДН
ФАР определяется углом отклонения  , который связан с фазовым сдвигом ф
соотношением
, который связан с фазовым сдвигом ф
соотношением
Следует заметить, что при
отклонении оси ДН от нормали к плоскости раскрыва ФАР ширина главного лепестка  увеличивается в соответствии с формулой
увеличивается в соответствии с формулой

Расширение связано с уменьшением
действующего раскрыва ФАР пропорционально  С расширением луча
связано ограничение угла сканирования (сектора обзора) величиной
С расширением луча
связано ограничение угла сканирования (сектора обзора) величиной  при которой
при которой  увеличивается в 2 раза. Это ведет к
снижению
увеличивается в 2 раза. Это ведет к
снижению  , ухудшению угловой
точности и разрешающей способности при увеличении
, ухудшению угловой
точности и разрешающей способности при увеличении  . Управление фазовращателями обычно осуществляется
. Управление фазовращателями обычно осуществляется
 цифровым процессором, при этом фаза
цифровым процессором, при этом фаза  изменяется дискретно с шагом
изменяется дискретно с шагом  , определяемым разрядностью процессора.
, определяемым разрядностью процессора.
При частотном управлении лучом ФАР
необходимый фазовый сдвиг колебаний, питающих излучатели антенны,
обеспечивается изменением частоты колебаний ш в соответствии с формулой

Линейную зависимость  от частоты ш можно получить, используя отрезки волновода
между излучателями ФАР. Набег фазы в отрезке волновода
от частоты ш можно получить, используя отрезки волновода
между излучателями ФАР. Набег фазы в отрезке волновода  , связан с его длиной lв и длиной волны в волноводе
, связан с его длиной lв и длиной волны в волноводе  которая позволяет выбрать параметры отрезка волновода и
изменение частоты колебаний, необходимое для получения заданного сектора
обзора.
которая позволяет выбрать параметры отрезка волновода и
изменение частоты колебаний, необходимое для получения заданного сектора
обзора.
Для сканирования по двум угловым
координатам  используются плоские ФАР с многорядным расположением элементов
решетки. При этом возможны различные варианты управления положением луча:
фазовым по обеим угловым координатам (фазово-фазовое), фазовым по одной и
частотной по другой (фазово-частотное). Возможно также смешанное
(электронно-механическое) сканирование, например поворотом ФАР по азимуту, и
электронное (фазовое или частотное) по углу места.
используются плоские ФАР с многорядным расположением элементов
решетки. При этом возможны различные варианты управления положением луча:
фазовым по обеим угловым координатам (фазово-фазовое), фазовым по одной и
частотной по другой (фазово-частотное). Возможно также смешанное
(электронно-механическое) сканирование, например поворотом ФАР по азимуту, и
электронное (фазовое или частотное) по углу места.
Достоинством фазового сканирования
является быстродействие управления и широкополосность при излучении и приеме
сигналов. Недостатком является сложность и высокая стоимость при большом числе
элементов ФАР, достигающем нескольких тысяч в наземных РЛС ПВО и ПРО.
Более конструктивно просты антенны
с частотным сканированием луча, но они сравнительно узкополосны, что
ограничивает возможность использования сложных широкополосных сигналов.
Применение ФАР с электронным
сканированием дает возможность формировать одновременно несколько управляемых
лучей, что позволяет РЛС одновременно осуществлять функции поиска, распознавания
и сопровождения целей, а также осуществлять подавление мешающих сигналов на
определенных направлениях. Выполнение этих операций возможно лишь при
совместной работе ФАР, систем формирования и обработки сигналов РЛС, а также
устройств отображения информации с управляющим компьютером.
Достижения в области микроволновой
техники и создании высокопроизводительных цифровых процессоров позволяет все
шире применять ФАР в РЛС различного назначения и особенно в многофункциональных
РЛС, реализация которых без применения ФАР просто невозможна.
Если в РЛС с ФАР имеется
возможность использования многоканального приемника с числом каналов,
соответствующим числу элементов ФАР, то возможно формирование характеристик
направленности в цифровом виде. При этом предполагается, что выполняется
условие пространственно-временной узкополосно- сти, позволяющее разделить
временную и пространственную составляющие обработки принимаемых сигналов и
осуществлять обработку в любой последовательности. В инженерных расчетах условие
пространственно-временной узкополосности выглядит как  — разрешение РЛС по дальности, обратно пропорциональное
ширине спектра принимаемого сигнала; LA — размер апертуры ФАР. В цифровом виде формирование
многолучевой ДН ФАР эквивалентно ДПФ от сигналов отдельных приемных каналов
(элементов ФАР). Для ускорения вычислений в процессоре пространственной
обработки сигналов ФАР целесообразно применять быстрые алгоритмы
преобразования Фурье (БПФ). Цифровые технологии формирования характеристик
направленности позволяют применять различные алгоритмы пространственной
обработки, в том числе адаптивные к помеховой обстановке и обеспечивающие
высокое угловое разрешение.
— разрешение РЛС по дальности, обратно пропорциональное
ширине спектра принимаемого сигнала; LA — размер апертуры ФАР. В цифровом виде формирование
многолучевой ДН ФАР эквивалентно ДПФ от сигналов отдельных приемных каналов
(элементов ФАР). Для ускорения вычислений в процессоре пространственной
обработки сигналов ФАР целесообразно применять быстрые алгоритмы
преобразования Фурье (БПФ). Цифровые технологии формирования характеристик
направленности позволяют применять различные алгоритмы пространственной
обработки, в том числе адаптивные к помеховой обстановке и обеспечивающие
высокое угловое разрешение.
Обзор пространства в
многопозиционных РЛС. Зона обзора системы, состоящей из нескольких независимых
РЛС, определяется их расположением и сектором обзора каждой из них. Так,
например, три независимых РЛС кругового обзора дают в совокупности зону обзора
в горизонтальной плоскости, представляющую площадь трех пересекающихся
окружностей с радиусами, равными дальности действия соответствующих РЛС. По
углу места сектор обзора определяется шириной ДНА РЛС в вертикальной плоскости.
Сложнее построить зону обзора МП
РЛС, состоящей из трех бистатических РЛС [2]. Построим зону обзора
бистатической РЛС (БРЛС), состоящей из передатчика в точке А и приемника в точке В на расстоянии базы d (рис. 5.6). Если расстояние от
передатчика до точки М на границе зоны
обзора обозначить DA, а от приемника
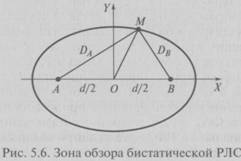
 —DB, то при нормировке этих расстояний к значению d/2 нормированные координаты точки Мхн и ун связываются уравнением (х2 + у2
+ 1)2 – 4xн:2
= = С4. Для получения
сплошной зоны обзора в виде эллипса величина С должна превышать 2, что
гарантируется, если база системы выбирается из соотношения
—DB, то при нормировке этих расстояний к значению d/2 нормированные координаты точки Мхн и ун связываются уравнением (х2 + у2
+ 1)2 – 4xн:2
= = С4. Для получения
сплошной зоны обзора в виде эллипса величина С должна превышать 2, что
гарантируется, если база системы выбирается из соотношения  .
.
Таким образом, результирующая зона
обзора МП РЛС, состоящей из передатчика в точке А и приемников в точках В,
С и D, будет площадью, ограниченной тремя
пересекающимися эллипсами, представляющими зоны обзора трех бистатических
систем (рис. 5.7).
Вообще даже для простой
бистатической системы зоны обзора могут быть разнообразными в зависимости от
поставленных задач и времени обзора заданной области пространства. При этом может
быть использован параллельный обзор с многолучевыми ДНА с различной шириной и
формой ДН антенных устройств, входящих в МП РЛС. Таким образом, построение
зоны обзора МП РЛС много сложнее, чем в случае однопозиционных РЛС, и определяется
конкретными задачами, решаемыми системой.
Существует много видов
многопозиционных систем и не только систем радиолокации, использующих принципы
отражения и переизлучения сигналов.
К многопозиционным относятся
системы радионавигации с опорными станциями наземного или космического (на ИСЗ)
базирования. В радиоастрономии применение разнесенных радиоастрономических
станций позволяет радикально повысить точность измерения координат и
разрешающую способность космических источников излучения в диапазоне радиоволн.
В системах мобильной связи
используется сеть базовых станций, обеспечивающих не только устойчивую связь
абонентов, но при необходимости и определение их местоположения.
Во всех этих случаях приходится
определять рабочие зоны систем.
5.4. Особенности поиска сигналов в
радионавигационных системах
Ранее упоминалось, что наличие
сигнала на входе радиоприемного устройства РНС не вызывает сомнения и поиск
сводится к грубому измерению времени запаздывания и средней частоты спектра
сигнала в заданной области их возможных значений.
Чаще всего возможные значения
времени запаздывания априори равновероятны в пределах от 0 до некоторого
значения Трr не превышающего полного периода сигнала.
Диапазон частотных расстроек, в котором проводится поиск, зависит от максимальной
скорости взаимного сближения (удаления) наблюдателя и РМ, расхождения частот
системного и местного эталонов времени и для конкретных условий работы РНС
определяется без труда. Будем считать, что возможные значения времени
запаздывания  и частоты F, измеряемые в процессе поиска, образуют на плоскости
и частоты F, измеряемые в процессе поиска, образуют на плоскости  прямоугольную область неопределенности со сторонами Трп
Fpr (рис. 5.8).
Требования к точности поиска зависят от параметров каналов сопровождения по
времени и частоте, функции которых чаще всего выполняют следящие измерители.
Следящие измерители вводят в синхронизм, если расстройка по измеряемым
параметрам не превосходит определенного значения. Система автоматической
подстройки частоты обеспечивает вхождение в синхронизм, если расстройка по
частоте не превышает полосу захвата
прямоугольную область неопределенности со сторонами Трп
Fpr (рис. 5.8).
Требования к точности поиска зависят от параметров каналов сопровождения по
времени и частоте, функции которых чаще всего выполняют следящие измерители.
Следящие измерители вводят в синхронизм, если расстройка по измеряемым
параметрам не превосходит определенного значения. Система автоматической
подстройки частоты обеспечивает вхождение в синхронизм, если расстройка по
частоте не превышает полосу захвата  системы. В системе сопровождения по
времени условие захвата удовлетворяется, если расстройка (исходное время
рассогласования) не превосходит значения
системы. В системе сопровождения по
времени условие захвата удовлетворяется, если расстройка (исходное время
рассогласования) не превосходит значения  . В общем случае
. В общем случае
 и область неопределенности может быть разбита на
и область неопределенности может быть разбита на
 элементарных ячеек. Для ввода систем сопровождения в
рабочий режим необходимо указать ячейку, соответствующую искомому сигналу.
Поэтому задача поиска может быть сведена к совместной оценке времени
запаздывания и частоты, принимающих
элементарных ячеек. Для ввода систем сопровождения в
рабочий режим необходимо указать ячейку, соответствующую искомому сигналу.
Поэтому задача поиска может быть сведена к совместной оценке времени
запаздывания и частоты, принимающих  дискретных значений, т.е. к различению
дискретных значений, т.е. к различению  сигналов.
сигналов.  В большинстве РНС интенсивность сигнала в процессе поиска
практически неизменна, и, следовательно, с учетом априорной равно вероятности
ячеек оптимальным правилом, максимизирующим вероятность правильного
обнаружения рп.о, является указание ячейки,
максимизирующей величину Z(t, F), огибающую
В большинстве РНС интенсивность сигнала в процессе поиска
практически неизменна, и, следовательно, с учетом априорной равно вероятности
ячеек оптимальным правилом, максимизирующим вероятность правильного
обнаружения рп.о, является указание ячейки,
максимизирующей величину Z(t, F), огибающую 
может достигать нескольких
десятков тысяч, поэтому практическое осуществление параллельного поиска
проблематично. В связи с этим находят применение упрощенные способы поиска,
основанные на параллельно-последовательном и последовательном просмотре зоны
не
 ячейке с пороговым уровнем. Решение о наличии сигнала в данной
ячейке принимается при превышении этого порога. Если уровень не превышен,
процедура поиска возобновляется и продолжается до тех пор, пока в одной из
ячеек превышение порогового уровня не произойдет.
ячейке с пороговым уровнем. Решение о наличии сигнала в данной
ячейке принимается при превышении этого порога. Если уровень не превышен,
процедура поиска возобновляется и продолжается до тех пор, пока в одной из
ячеек превышение порогового уровня не произойдет.
При проектировании
приемоиндикаторов РНС необходимо определить среднее время поиска сигнала  и вероятность правильного обнаружения рп.о. Их значения зависят от вероятностей превышения порога в
пустой ячейке (вероятность ложной тревоги
и вероятность правильного обнаружения рп.о. Их значения зависят от вероятностей превышения порога в
пустой ячейке (вероятность ложной тревоги  и не превышения порога в ячейке,
содержащей сигнал (вероятность пропуска сигнала рп.
с), а также от
времени анализа Та, (времени на вычисление и сравнение с
порогом) в каждой из М ячеек.
и не превышения порога в ячейке,
содержащей сигнал (вероятность пропуска сигнала рп.
с), а также от
времени анализа Та, (времени на вычисление и сравнение с
порогом) в каждой из М ячеек.
Поскольку время Та также является функцией  , вывод общих зависимостей достаточно
сложен, а конечные формулы
, вывод общих зависимостей достаточно
сложен, а конечные формулы
громоздки. Однако при малых
значениях рлт, когда выполняется условие  можно получить достаточно простые формулы для расчета
можно получить достаточно простые формулы для расчета  при последовательном поиске:
при последовательном поиске:

Последний результат позволяет
установить, что минимум  при фиксированной вероятности правильного
обнаружения рп.о = const достигается при
ненулевом значении вероятности пропуска в ячейке рп.с.
Дело в том, что гарантировать
достижение заданной вероятности обнаружения сигнала в ячейке можно только
затратив на ее анализ время Та, которое тем больше, чем при прочих
равных условиях меньше требуемая вероятность пропуска рп. с. С уменьшением рп.
с до нуля сомножитель
Та стремится к бесконечности, что несмотря на стремление
второго сомножителя к его минимуму (М+ 1)/2 приводит к неограниченному росту
при фиксированной вероятности правильного
обнаружения рп.о = const достигается при
ненулевом значении вероятности пропуска в ячейке рп.с.
Дело в том, что гарантировать
достижение заданной вероятности обнаружения сигнала в ячейке можно только
затратив на ее анализ время Та, которое тем больше, чем при прочих
равных условиях меньше требуемая вероятность пропуска рп. с. С уменьшением рп.
с до нуля сомножитель
Та стремится к бесконечности, что несмотря на стремление
второго сомножителя к его минимуму (М+ 1)/2 приводит к неограниченному росту  Физически это означает, что добиться гарантированного завершения
поиска на первом же просмотре можно только ценой очень долгого «стояния» в
каждой ячейке, что затягивает всю процедуру.
Физически это означает, что добиться гарантированного завершения
поиска на первом же просмотре можно только ценой очень долгого «стояния» в
каждой ячейке, что затягивает всю процедуру.
Таким образом, предъявлять к
вероятности пропуска в ячейке рп.с чрезмерно жесткие требования
нецелесообразно. Кроме того, иметь  также нельзя: хотя при этом время
пребывания в каждой ячейке Та будет малым, из-за частых пропусков
поиск сведется к длительным повторяющимся просмотрам области неопределенности
( окажется длительным,
что формально проявляется в стремлении к бесконечности второго слагаемого в
скобках формулы (5.16) при
также нельзя: хотя при этом время
пребывания в каждой ячейке Та будет малым, из-за частых пропусков
поиск сведется к длительным повторяющимся просмотрам области неопределенности
( окажется длительным,
что формально проявляется в стремлении к бесконечности второго слагаемого в
скобках формулы (5.16) при  ). Как показывают расчеты, при общем
числе просматриваемых ячеек
). Как показывают расчеты, при общем
числе просматриваемых ячеек  значение рп.с, минимизирующее
значение рп.с, минимизирующее  , лежит в пределах
, лежит в пределах 
Контрольные вопросы
1.Назовите основные характеристики
РЛС, влияющие на выбор способа обзора заданной рабочей зоны.
2.Какие параметры характеризуют
эффективность выбранного метода обзора?
3.В чем отличие параллельного,
последовательного и параллельно- Последовательного методов обзора?
4.Каковы пути снижения времени
обзора заданной рабочей зоны РЛС?
5.В чем отличие винтового и
спирального методов последовательного обзора пространства?
6.Каковы достоинства
многоканального обзора пространства?
7.В чем суть управляемого по
программе и адаптивного способа обзора? Укажите их преимущества и возможность
практической реализации?
8.Определите время обзора сектора  при последовательном спиральном обзоре, если РЛС имеет
симметричную ДНА шириной 5° и частоту повторения импульсов 1 кГц.
при последовательном спиральном обзоре, если РЛС имеет
симметричную ДНА шириной 5° и частоту повторения импульсов 1 кГц.
9.В РЛС с винтовым обзором сектор
обзора 
 Определить время обзора
Определить время обзора  , если необходимое число накапливаемых
импульсов
, если необходимое число накапливаемых
импульсов  . Какие способы возможно использовать для уменьшения времени
обзора?
. Какие способы возможно использовать для уменьшения времени
обзора?