А — антенна
АДРМ — азимутально-дальномерный радиомаяк
АКФ — автокорреляционная функция
AM — амплитудная модуляция
АП — антенный переключатель
АПВ — автоматическая подстройка времени
АПЧ — автоматическая подстройка частоты
АРМ — азимутальный радиомаяк
АРУ — автоматическая регулировка усиления
АЦП — аналого-цифровой преобразователь
АЧХ — амплитудно-частотная характеристика
БАРУ — быстродействующая автоматическая регулировка
усиления
БПФ — быстрое преобразование Фурье
БСПС — бортовые системы предупреждения столкновений
ВАРУ — временная автоматическая регулировка усиления
ВИКО — выносной индикатор кругового обзора
ВОРЛ — вторичный обзорный радиолокатор
ВПП — взлетно-посадочная полоса
ВС — воздушное судно
ВТО — высокоточное оружие
ВУ — видеоусилитель
ГВЧ — генератор высокой частоты
ГЛОНАСС — глобальная навигационная спутниковая система
ГРМ — глиссадный радиомаяк
ГУН — генератор, управляемый напряжением
ДИСС — допплеровский измеритель скорости и угла сноса
ДНА — диаграмма направленности антенны
ДПФ — дискретное преобразование Фурье
ДРМ — дальномерный радиомаяк
ДЦ — движущаяся цель
ЗИП — запасное имущество и принадлежности
ЗУР — зенитные управляемые ракеты
ИКО — индикатор кругового обзора
ИСЗ — искусственный спутник Земли
ИФРНС — импульсно-фазовая радионавигационная система
КА — канал азимута
КД — канал дальности
ККС — контрольно-корректирующая станция
КНД — коэффициент направленного действия
КО — круговой обзор
КРМ — курсовой радиомаяк
КРП — контррадиопротиводействие
JIA — летательный аппарат
ЛГ — линия глиссады
Л К — линия курса
ЛП — линия положения
МАП — максимум апостериорной плотности вероятности
МКРР — международная комиссия распределения
радиочастот
МП — максимум правдоподобия
МРМ — маркерный радиомаяк
МСН — межсамолетная навигация
МПРЛС — многопозиционные радиолокационные системы
НБШ — нормальный белый шум
ОГ — опорный генератор
ОЗУ — оперативное запоминающее устройство
ОЛС — оптическая локационная система
ОМП — оценка максимального правдоподобия
ОпС — оптическая система
ОП — отношение правдоподобия
ОрГ — орбитальная группировка
ОФК — обобщенная функция корреляции
П В — плотность вероятности
ПВО — противовоздушная оборона
ПВФ — пространственно-временной фильтр
ПЗС — приборы с зарядовой связью
ПЗУ — постоянное запоминающее устройство
ПИ — приемоиндикатор
ПОИ — пункт обработки информации
ПРО — противоракетная оборона
РЛ — радиолокация
РЛС — радиолокационная станция
РЛИ — радиолокационная информация
РМ — радиомаяк
РН — радионавигация
РНП — радионавигационный параметр
РНС — радионавигационная система
РНТ — радионавигационная точка
РП — радиопеленгатор
РПД — радиопротиводействие
РСБН — радиосистема ближней навигации
РТС — радиотехническая система
РЭБ — радиоэлектронная борьба
РЭС — радиоэлектронные средства
САУ — система автоматического управления
СВРЛ — система вторичной радиолокации
СД — синхронный детектор; средства диагностирования
СДЦ — селекция движущихся целей
С К — система координат
СКО — среднеквадратическое отклонение
СМ — смеситель
СП — системы посадки
СПМ — спектральная плотность мощности
СРНС — спутниковая радионавигационная система
СФ — согласованный фильтр
СШП — сверхширокополосный
ТТХ — тактико-технические характеристики
УВД — управление воздушным движением
УВЧ — усилитель высокой частоты
УМ — усилитель мощности
УПОИ — устройство первичной обработки информации
УПЧ — усилитель промежуточной частоты
ФАПЧ — фазовая автоподстройка частоты
ФАР — фазированная антенная решетка
ФВ — фазовращатель
ФВН — функция взаимной неопределенности
ФД — фазовый детектор; функциональное дополнение
ФМ — фазовая манипуляция
ФН — функция неопределенности
ФНЧ — фильтр нижних частот
ФРНС — фазовая радионавигационная система
ФЦР — фазовый центр рассеяния
ФЧХ — фазово-частотная характеристика
ХИП — хаотическая импульсная помеха
ЧМ — частотная модуляция
ЧПК — череспериодный компенсатор
ЭЛТ — электронно-лучевая трубка
ЭМС — электромагнитная совместимость
ЭПР — эффективная площадь рассеяния
ADT — автоматическое обнаружение и
сопровождение (Automatic Detection and Tracking)
AWACS — система раннего обнаружения и
управления (Airborne Warning And Control System)
DME — оборудование для измерения дальности (Distance Measurement Equipment)
GPS — глобальная система позиционирования (Global Position System)
ICAO — Международная организация гражданской
авиации (International Civil Aviation Organization )
ILS — система инструментальной посадки (Instrument Landing System)
LORAN — система дальней навигации (Long Range Navigation System)
MLS — микроволновая система посадки (Microwave Landing System)
Navstar — навигационные спутники измерения времени
и дальности (Navigational Satellit of Time and Ranging)
Radar — 1. радиолокация; 2. радиолокатор, радиолокационная
станция, РЛС (Radio detection and ranging) SAR — РЛС с синтезированием апертуры (Synthetic Aperture Radar)
TACAN — навигационная система для тактической
авиации (Tactical Air Navigation System)
TCAS — система предупреждения столкновений (Traffic Collision Avoidance System)
VOR — всенаправленный радиомаяк УКВ диапазона
(VHF Omnidirectional Radio Range)
Радиотехнические
системы (РТС) относятся к классу информационно-управляющих технических систем,
осуществляющих извлечение, передачу или разрушение информации с помощью
радиоволн. Отличительный признак РТС
— наличие радиоканала, состоящего
из источника радиоволн, являющихся носителем информации, среды распространения
радиоволн и приемника, извлекающего информацию путем соответствующей обработки
радиоволн, достигающих антенны РТС. Радиоволны, несущие ту или иную
информацию, называются радиосигналом.
Таким образом, характерным
признаком радиосистемы является использование радиосигнала в качестве носителя
информации. Назначение информации — один из признаков классификации
радиосистем. По этому признаку радиосистемы подразделяются на системы
передачи, извлечения и разрушения информации, а также системы радиоуправления.
В свою очередь, каждая из этих групп имеет свои разновидности, отличающиеся
функциональным назначением радиосистем. Так, среди систем передачи информации
различают системы радиосвязи, телеметрии или передачи команд, радиовещания и
телевидения.
К системам извлечения информации
относятся радиолокационные и радионавигационные системы, системы радиоастрономии,
радионаблюдения поверхности Земли или других планет, радиоразведки
радиотехнических средств противника.
Системы разрушения и н фор маци и
(радиопротиводействия) служат для создания условий, затрудняющих или делающих
невозможной работу радиосредств противника.
Системы радиоуправления
используются для управления работой различных объектов (чаще всего движущихся)
с помощью радиосигналов.
По виду применяемых сигналов
различают непрерывные, импульсные и цифровые радиосистемы. В непрерывных
системах информация отображается изменением параметров (амплитуды, частоты,
фазы) непрерывного, обычно гармонического сигнала. В импульсных системах
сигнал представляет собой последовательность Радиоимпульсов, в которой
информацию могут нести изменяющиеся параметры как отдельных импульсов
(амплитуда, частота, фаза, длительность), так и всей последовательности
(число импульсов в последовательности, интервал между ними). В цифровых
системах передаваемый сигнал предварительно квантуется по времени и уровню.
Каждому уровню соответствует кодовая группа импульсов, которая и модулирует
несущие колебания.
Для создания радиосистем различного
назначения используется практически весь диапазон радиоволн: от миллиметровых
 до мириаметровых
до мириаметровых  . Лазерные системы, тесно примыкающие по
принципу действия к радиотехническим, работают в инфракрасном и оптическом
диапазонах электромагнитных волн. Следует отметить, что использование того или
иного диапазона радиоволн так же, как и ширина спектра частот, отводимого
радиосистеме того или иного типа, регламентируется международной комиссией
распределения радиочастот (МКРР). Эти ограничения влияют на выбор вида
радиосигнала и построение радиосистемы и, в конечном счете, сказываются на ее
тактико-технических характеристиках (ТТХ).
. Лазерные системы, тесно примыкающие по
принципу действия к радиотехническим, работают в инфракрасном и оптическом
диапазонах электромагнитных волн. Следует отметить, что использование того или
иного диапазона радиоволн так же, как и ширина спектра частот, отводимого
радиосистеме того или иного типа, регламентируется международной комиссией
распределения радиочастот (МКРР). Эти ограничения влияют на выбор вида
радиосигнала и построение радиосистемы и, в конечном счете, сказываются на ее
тактико-технических характеристиках (ТТХ).
При создании системы стремятся
получить наилучшие характеристики для определенных условий ее работы. Для
сравнения вариантов построения проектируемой системы и выбора наилучшего
(оптимального) варианта необходимо обоснованно выбрать показатель качества системы
(критерий оптимизации). Поскольку требования к системе многочисленны и часто
противоречивы, желательно оптимизировать систему по какому-то обобщенному
критерию, учитывающему основные требования к ней. В качестве такого обобщенного
критерия может применяться эффективность системы, под которой чаще всего имеют
в виду количественную характеристику качества выполнения системой заданных функций,
отнесенную к затратам (энергетическим, информационным и экономическим).
Однако на практике оценку качества
работы системы обычно производят по ее основным ТТХ (зоне действия, точности и
достоверности, разрешающей способности, пропускной способности,
быстродействию, помехозащищенности, надежности).
Основные параметры РТС имеют
вероятностный (статистический) характер, что предопределяет необходимость
статистического подхода к анализу и синтезу РТС. Деятельность разработчиков
радиотехнических систем и комплексов немыслима без применения методов
статистической радиотехники, многие разделы которой непосредственно связаны с
развитием радиолокационной и радионавигационной техники. Статистическая теория
радиосистем позволяет оценить предельные значения основных параметров
радиосистем и найти оптимальные технические решения для приближения к этим
значениям.
Радиоволны, являющиеся носителем
информации в РТС, представляют собой электромагнитные поля. Поскольку поле
математически описывается скалярной (напряженность) или векторной (при учете
поляризационных эффектов) функцией времени и пространственных координат, радиосигнал
является пространственно-временным.
Помехи, которые обычно имеют место
при работе РТС, есть не что иное, как некоторое вредное поле, взаимодействующее
с сигнальным. При таком взаимодействии образуется результирующее поле, которое
и воспринимается приемной антенной РТС. В силу своей непредсказуемости помеха
разрушает однозначную связь поля в месте приема с переносимым сообщением, и
задачей статистической теории является ответ на вопрос, как наилучшим способом
использовать пространственные и временные свойства сигналов и помех для
эффективного функционирования радиосистем различного назначения.
В большинстве практических случаев
сигнал можно рассматривать как функцию времени, на которую тем или иным
способом наложено передаваемое сообщение. На приемной стороне (наблюдатель)
сигнал доступен лишь в смеси с помехой, и задачей наблюдателя является
извлечение с наибольшей достоверностью полезной информации, содержащейся в
сигнале. Под извлечением информации понимают процедуры обнаружения сигналов и
оценки их параметров, которые, в конечном счете, сводятся к различению
сигналов, т.е. к установлению, какой из возможных сигналов присутствует в
принимаемых колебаниях или отсутствует вообще.
В ряде случаев (пассивная локация,
радиоастрономия, радиоразведка) отправитель сообщения независим от создателя
или пользователя радиосистемы и задача сводится к выбору оптимального метода
приема и обработки сигнала (извлечения информации). В других случаях
(полуактивная локация, передача информации, радионавигация, радиоуправление)
отправитель информации в той или иной степени подчинен разработчику системы.
При этом, придерживаясь так называемого системного подхода, наряду с
оптимальным приемом предусматривается рациональный выбор как самих сигналов,
так и способов их кодирования.
ПРИНЦИПЫ ПОСТРОЕНИЯ РАДИОЛОКАЦИОННЫХ И
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
1.1. Основные понятия и определения
Радиолокацией (PJI) называется область
науки и техники, объединяющая методы и технические средства обнаружения,
измерения координат и параметров движения, а также определения некоторых
характеристик различных объектов (радиолокационных целей), основанные на
использовании радиоволн, излучаемых, ретранслируемых или отражаемых
(рассеиваемых) этими объектами. Процесс обнаружения объектов, измерение их
координат и параметров движения называется радиолокационным наблюдением (иногда
радиолокацией цели), а используемые для этого системы — радиолокационными
станциями (PЛC), или радиолокаторами. В иностранной литературе для
радиолокации и PЛC принято название Radar (Radio detection and ranging), отражающее основные
функции радиолокационной системы.
Радионавигация — область науки и
техники, охватывающая радиотехнические методы и средства вождения кораблей,
летательных и космических аппаратов, а также других движущихся объектов.
Таким образом, радиолокация и
радионавигация тесно связаны общностью решаемой ими задачи: определение
координат объектов.
Радиоуправление — область техники,
включающая в себя радиотехнические методы и средства управления объектами, в
частности их движением. Совокупность технических средств для такого управления
называется системой радиоуправления. В радиоуправлении могут быть использованы
как радиолокационные, так и радионавигационные системы (РНС).
В зависимости от природы
возникновения электромагнитных волн, достигающих антенны PJIC и доставляющих информацию об объектах радиолокационного
наблюдения, различают активную, полуактивную, активную с активным ответом и
пассивную радиолокацию.
При активной радиолокации сигнал,
принимаемый приемником PЛC, создается в
результате отражения (рассеяния) объек том электромагнитных колебаний,
излучаемых антенной РЛС и облучающих объект.
Сигнал, излучаемый антенной РЛС,
называется прямым, или зондирующим, а принимаемый приемной антенной PJIC, — отраженным
(рассеянным), или радиолокационным. Таким образом, при активной радиолокации
применяется передатчик, генерирующий зондирующий сигнал, и информацию об
объекте извлекают при обработке отраженного (рассеянного) объектом сигнала.
При полуактивной радиолокации
носителем информации также является сигнал, отраженный объектом, но источник
облучающих объект радиоволн вынесен относительно приемника PЛC и может действовать независимо от него. Например, передающее
устройство, создающее сигнал, облучающий цель, может быть расположено на земле
или корабле, а приемник, использующий отраженный сигнал,
— на ракете, направленной на объект
(цель). Такая радиолокация в ряде источников называется радиолокацией «с
подсветом» и используется, например, в случае, когда требуется обеспечить
скрытность получателя информации о цели.
Возможность обнаружения и измерения
параметров объектов, не являющихся источниками радиоизлучения, является достоинством
активного и полуактивного методов радиолокации.
При активной радиолокации с
активным ответом (часто называемой вторичной радиолокацией, в отличие от
активной, называемой первичной) применяют сигнал, ретранслируемый
(переизлучаемый) специальным приемопередатчиком
— ответчиком, установленным на
объекте. Приемник ответчика принимает сигнал, излучаемый РЛС, который вызывает
формирование и излучение ответного сигнала. Ответный сигнал может иметь
мощность значительно большую, чем отраженный, поэтому применение активного
ответа позволяет существенно повысить дальность действия и помехозащищенность
такой системы.
Кроме того, ответный сигнал может
быть использован для передачи дополнительной информации с объекта (например,
бортовой номер самолета, высота объекта и др.). С помощью ответчика решается
и задача опознавания объекта, например отличия «своих» самолетов от «чужих»
(устройства опознавания «свой
—чужой»). Принцип активного ответа
широко применяется в радионавигации и радиоуправлении, например в
радиосистемах ближней навигации (РСБН) и системах управления воздушным
движением (УВД).
В пассивной радиолокации сигналом,
принимаемым приемником РЛС, является собственное излучение объекта в
радиодиапазоне. Это может быть излучение передающих устройств различных РТС,
излучение гетеродинов приемников, паразитное излучение радиоэлектронных
приборов, которые размещены на объекте. К естественному излучению объектов
относится и тепловое излучение в инфракрасном диапазоне. Пассивная
радиолокация, использующая для обнаружения объектов их тепловое излучение,
называется радиотеплолокацией. Таким образом, в этом случае, так же как и в
активной радиолокации, для обнаружения объектов и определения их координат
применяют радиосигнал. Однако природа этого сигнала другая: зондирование
(облучение) объекта отсутствует, поэтому одна пассивная PJIC может определить направление на объект — пеленг, т.е.
осуществить радиопеленгование последнего. При наличии двух и более пассивных PЛC, разнесенных в пространстве на известное расстояние, может
быть решена задача определения координат объекта. В настоящее время в пассивной
радиолокации разработаны специальные методы определения дальности по
сферичности фронта принимаемой радиоволны, которые дают «грубую» оценку
дистанции до излучающего объекта. Пассивная радиолокация тесно связана с
радиопеленгацией — отраслью радионавигации, основанной на определении направления
на объекты, имеющие источники излучения.
Таким образом, основой
радиолокационного обнаружения, определения координат, скорости и некоторых
других характеристик (размеров, формы, физических свойств) объектов является
радиосигнал, отраженный, переизлученный или излученный объектом наблюдения. В
активной радиолокации электромагнитные колебания зондирующего сигнала
становятся носителем информации об объекте, т.е. радиолокационным сигналом,
только после их отражения (рассеяния) объектом наблюдения. Однако от вида и
параметров зондирующего сигнала (энергии, несущей частоты, длительности и ширины
спектра) зависят основные характеристики PЛC: дальность действия, точность измерения координат и скорости
объектов, разрешающая способность, т.е. тот объем информации, который может
быть получен при обработке радиолокационного сигнала.
В общем случае напряжение
модулированного сигнала можно записать в комплексной форме:
 Под зондирующим обычно понимается сигнал, излучаемый антенной
PЛC, поэтому его
модуляция оказывается связанной также с параметрами антенной системы и ее
движением. Так, при повороте диаграммы направленности антенны (ДНА) относительно
направления на объект амплитуда отраженного или принятого объектом сигнала
изменяется, т.е. появляется дополнительная амплитудная модуляция, параметры
которой зависят от ширины и формы ДНА, а также скорости ее поворота.
Под зондирующим обычно понимается сигнал, излучаемый антенной
PЛC, поэтому его
модуляция оказывается связанной также с параметрами антенной системы и ее
движением. Так, при повороте диаграммы направленности антенны (ДНА) относительно
направления на объект амплитуда отраженного или принятого объектом сигнала
изменяется, т.е. появляется дополнительная амплитудная модуляция, параметры
которой зависят от ширины и формы ДНА, а также скорости ее поворота.
Если отражающий объект попадет в
зону облучения РЛС (в пределы ширины ДНА), то создается отраженный сигнал, несущий
информацию об объекте. Факт приема сигнала приемником РЛС свидетельствует об
обнаружении объекта, а параметры принятого сигнала (амплитуда, фаза, частота,
вид поляризации, время задержки относительно зондирующего сигнала, направление
прихода к приемной антенне) позволяют определить координаты объекта и параметры
его движения, а при наличии нескольких объектов в зоне наблюдения — разделить
их (разрешить), т.е. выделить объект с требуемыми свойствами и т.д.
1.2. Радиотехнические методы
определения
координат и их производных
В общем случае мгновенное положение
объекта в пространстве характеризуется тремя координатами  в той или иной системе координат (СК). Для характеристики
движения объектов необходимы также производные координат
в той или иной системе координат (СК). Для характеристики
движения объектов необходимы также производные координат  число которых зависит от траектории движения объекта. На
практике чаще всего используют производные не выше второго порядка, т.е. скорость
объекта
число которых зависит от траектории движения объекта. На
практике чаще всего используют производные не выше второго порядка, т.е. скорость
объекта  и ускорение
и ускорение  . При этом обычно имеют в виду координаты
центра тяжести объекта, а при радиолокации — его центра отражения. Часто
измеряют непосредственно лишь координаты, а их производные получают вычислительным
путем. Возможно также непосредственно оценить составляющую относительной
скорости объекта, перпендикулярную фронту приходящей к антенне волны, и
радиальную составляющую путем измерения допплеровского смещения частоты
сигнала, отраженного или излученного объектом. Интегрированием радиальной
скорости можно получить соответствующее перемещение, а ее дифференцированием
. При этом обычно имеют в виду координаты
центра тяжести объекта, а при радиолокации — его центра отражения. Часто
измеряют непосредственно лишь координаты, а их производные получают вычислительным
путем. Возможно также непосредственно оценить составляющую относительной
скорости объекта, перпендикулярную фронту приходящей к антенне волны, и
радиальную составляющую путем измерения допплеровского смещения частоты
сигнала, отраженного или излученного объектом. Интегрированием радиальной
скорости можно получить соответствующее перемещение, а ее дифференцированием
— радиальное ускорение.
При активной радиолокации с учетом
распространения сигнала от РЛС до цели и обратно частота отраженного сигнала
вследствие эффекта Допплера отличается от частоты излучаемого на значение
 где
где  — несущая частота зондирующего сигнала;
— несущая частота зондирующего сигнала;  — радиальная
составляющая относительной скорости объекта; с — скорость распространения
радиоволн;
— радиальная
составляющая относительной скорости объекта; с — скорость распространения
радиоволн;  — длина волны излучаемых колебаний.
— длина волны излучаемых колебаний.
Таким образом, радиальная
составляющая скорости  может быть вычислена по формуле
может быть вычислена по формуле
 если известна и измерено допплеровское
смещение частоты
если известна и измерено допплеровское
смещение частоты  . Следует отметить, что формула (1.2) применима лишь при
значениях скорости
. Следует отметить, что формула (1.2) применима лишь при
значениях скорости  много меньших скорости распространения радиоволн с, когда
допустимо не учитывать релятивистский эффект.
много меньших скорости распространения радиоволн с, когда
допустимо не учитывать релятивистский эффект.
При радиолокационном определении
координат в основу положено свойство радиоволн распространяться в однородной
среде прямолинейно и с постоянной скоростью.
Скорость распространения радиоволн
зависит от электромагнитных свойств среды и составляет в свободном
пространстве (вакууме) с — 299 792 458 м/с. Там, где это не вызывает
существенных погрешностей, обычно применяют округленные значения с  3 • 108 м/с = = 3 • 105 км/с.
3 • 108 м/с = = 3 • 105 км/с.
Постоянство скорости и
прямолинейность распространения радиоволн позволяют вычислить дальность D от PЛC до объекта по измеренному времени прохождения сигнала xD (времени задержки сигнала) от PЛC до объекта и обратно

Свойство прямолинейности
распространения радиоволн является основой радиотехнических методов
определения координат по направлениям прихода сигнала. В радионавигации процесс
определения направления на источник излучения называется радиопеленгованием.
При этом используются направленные свойства антенных систем.
Радиотехнические методы позволяют
также непосредственно найти разность дальностей до двух разнесенных
передатчиков (радиомаяков) радионавигационной системы путем измерения разности
времени приема их радиосигналов на объекте, определяющем свое местоположение.
В радионавигации наибольшее
распространение получили позиционные системы, в которых местоположение
объектов определяется относительно радиомаяков (станций) с известными
координатами (позицией). Для таких систем вводят понятия радионавигационного
параметра, поверхностей и линий положения.
Радионавигационным параметром (РНП)
называется физическая величина, непосредственно измеряемая РНС (расстояние,
разность или сумма расстояний, угол).
Под поверхностью положения понимают
геометрическое место точек, имеющих одно и то же значение РНП.
Линия положения — это линия
пересечения двух поверхностей положения. Местоположение объекта задается
пересечением трех поверхностей положения или поверхности и линии положения.
Соответственно с видом
непосредственно измеряемых координат различают три основных метода определения
местоположения (местоопределения) объекта: угломерный, дальномерный и
разностно-дальномерный. Широко применяют также комбинированный
угломерно-дальномерный метод.
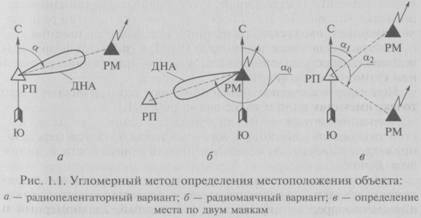
Угломерный метод. Этот метод
является самым старым, поскольку возможность определения направления прихода
радиоволн была установлена А.С.Поповым еще в 1897 г. при проведении опытов по радиосвязи на Балтийском море. При этом используются направленные
свойства антенн при передаче и приеме радиосигнала. Существует два варианта
построения угломерных систем: радиопелен гаторный и радиомаячный. В
радиопеленгаторной системе используется радиопеленгатор
— приемник с направленной антенной,
а источник сигнала (радиомаяк) имеет ненаправленное излучение. При расположении
радиопеленгатора (РП) и радиомаяка (РМ) в одной плоскости, например на
поверхности земли, направление на маяк характеризуется пеленгом а (рис. 1.1,
а). Если пеленг отсчитывается от географического меридиана (направление север
—юг), то он называется истинным пеленгом, или азимутом. Часто азимутом
называется угол в горизонтальной плоскости, отсчитанный от любого направления,
принятого за нулевое. Определение направления производят в месте расположения
РП, и если последний находится на борту объекта, то местоопределения
осуществляется непосредственно на объекте (рис. 1.1, в).
В радиомаячной системе (рис. 1.1,
6) используются радиомаяк с направленной антенной и ненаправленный приемник. В
этом случае в месте расположения приемника измеряют обратный пеленг а0 относительно нулевого направления,
проходящего через точку расположения радиомаяка.
Часто применяют маяк с вращающейся
ДНА. В момент совпадения оси ДНА с нулевым (например, северным) направлением
вторая ненаправленная антенна маяка излучает нулевой (северный) сигнал,
который принимается приемником на объекте,
 определяющем свое местоположение, и является началом отсчета
углов. Фиксируя момент совпадения оси вращающейся ДНА маяка с направлением на
приемник (например, по максимуму сигнала), можно определить обратный пеленг ос0,
который при равномерном вращении ДНА маяка пропорционален промежутку времени
между приемом нулевого сигнала и сигнала в момент пеленга (максимума сигнала).
определяющем свое местоположение, и является началом отсчета
углов. Фиксируя момент совпадения оси вращающейся ДНА маяка с направлением на
приемник (например, по максимуму сигнала), можно определить обратный пеленг ос0,
который при равномерном вращении ДНА маяка пропорционален промежутку времени
между приемом нулевого сигнала и сигнала в момент пеленга (максимума сигнала).
В этом случае приемник упрощается,
так как не требуется применять направленную антенну, что весьма важно во многих
случаях.
Поверхностью положения угломерной
РНС, измеряющей угол в горизонтальной плоскости (азимут), является вертикальная
плоскость, проходящая через линию пеленга. При измерении углов в вертикальной
плоскости, называемых радиолокации углами места цели и отсчитываемых от
горизонтальной плоскости (например, земной поверхности), проходящей через
точку расположения антенны РЛС, поверхностью положения является коническая
поверхность, образующей которой является линия пеленга.
При использовании наземных или
морских РП и РМ линия положения называется ортодромией, являющейся дугой
большого круга (сечения Земли, проходящего через ее центр), соединяющей точки
расположения РП и РМ. Таким образом, ортодромия
— это линия пересечения поверхности
положения при измерении азимута с земной (морской) поверхностью. При
расстояниях, малых по сравнению с радиусом Земли, ортодромия аппроксимируется
отрезком прямой линии, соединяющей точки расположения РП и РМ. Для определения
местоположения РП (см. рис. 1.1, в) необходим второй РМ. По двум пеленгам
(азимутам) а, и а2 можно найти местоположение РП как точку
пересечения двух линий положения на земной поверхности (пересечение двух
ортодромий). Если система расположена в пространстве, то для определения
местоположения РП необходим третий РМ. При определении местоположения
предполагают, что координаты радиомаяков известны.
В морской и воздушной навигации
используется понятие курса — угла между продольной осью корабля (проекцией
продольной оси самолета на поверхность земли) и направлением начала отсчета
углов в горизонтальной плоскости, в качестве которого выбирают или меридиан
(географический или магнитный), или линию ортодромии. Соответственно различают
географический, магнитный и ортодромический курсы.
В воздушной навигации в качестве
третьей координаты летательного аппарата (ЛА) используют барометрическую
высоту полета Я, отсчитываемую по барометрическому высотомеру относительно
условного начального уровня (за который обычно принимают уровень Балтийского
моря), и истинную высоту над поверхностью под ЛА, измеряемую радиовысотомером
(РВ). При применении радиовысотомера местоположение
ЛA определяется комбинацией угломерного и дальномерного методов
измерения координат.
Дальномерный метод. Этот метод
основан на измерении расстояния D между точками излучения и приема
радиосигнала по времени его распространения между этими точками. В радионавигации
дальномерный метод используется в двух вариантах: запросном и беззапросном. В
первом местоопределения осуществляется при измерении времени распространения сигнала
запроса  от передатчика запросчика 3 (рис. 1.2, а) до приемника
ответчика О и ответного сигнала
от передатчика запросчика 3 (рис. 1.2, а) до приемника
ответчика О и ответного сигнала  , формируемого ответчиком при приеме
сигнала запросчика. Полагая
, формируемого ответчиком при приеме
сигнала запросчика. Полагая  и пренебрегая временем формирования
ответного сигнала, получим формулу измерения дальности D в таком радиодальномере:
и пренебрегая временем формирования
ответного сигнала, получим формулу измерения дальности D в таком радиодальномере:

В качестве ответного может быть
использован и отраженный сигнал, что имеет место при измерении дальности
активной PЛC или высоты радиовысотомером.
При беззапросном дальномерном
методе, используемом, например, в спутниковых РНС, дальность вычисляется при
измерении времени распространения сигнала, излучаемого передатчиком на
искусственном спутнике Земли (ИСЗ), до приемника потребителя. При этом для
точного измерения D необходимо обеспечить жесткую синхронизацию колебаний
опорного генератора аппаратуры потребителя с сигналами аппаратуры ИСЗ.
Поверхностью положения дальномерной
системы является поверхность сферы с радиусом, равным D. При расположении
дальномерной системы на плоскости (например, на поверхности земли при
расстояниях D много меньших радиуса Земли R3) образуются линии положения в виде окружностей, являющихся
линиями пересечения сферы радиуса D с поверхностью, на которой расположены
запросчик и ответчик дальномерной системы (поэтому дальномерные системы называются
также круговыми). Местоположение объекта, на котором расположен запросчик 3
(рис. 1.2, б), определяется как точка пересечения двух окружностей с радиусами,
равными дальностям D1 и D2 до ответ

 запросчиков О1 и O2 с
известными координатами. Имеющаяся при этом двузначность (две точки пересечения
окружностей) устраняется применением дополнительных средств ориентирования,
точность которых может быть невысокой, но достаточной для достоверного выбора
одной из двух точек пересечения.
запросчиков О1 и O2 с
известными координатами. Имеющаяся при этом двузначность (две точки пересечения
окружностей) устраняется применением дополнительных средств ориентирования,
точность которых может быть невысокой, но достаточной для достоверного выбора
одной из двух точек пересечения.
Поскольку измерение времени
задержки сигнала, на котором основан дальномерный метод, может производиться с
очень малыми погрешностями, дальномерные РНС позволяют найти координаты с
высокой точностью. Радиодальномерные методы начали применяться позже
угломерных. Первые радиодальномеры, основанные на фазовых измерениях временной
задержки, были разработаны в СССР под руководством Л.И.Мандельштама, Н.Д.
Папалекси и Е.Я. Щеголева в 1935— 1937 гг. Импульсный метод измерения
дальности был применен в импульсной РЛС, разработанной в 1936— 1938 гг. под
руководством Ю. Б. Кобзарева.
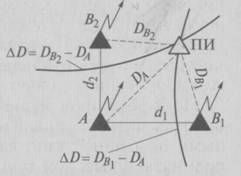
Разностно-дальномерный метод. С
помощью приемоиндикатора (ПИ), расположенного на борту объекта, определяют
разность времени приема сигналов двух опорных станций А и В. Станцию А
разностно-дальномерной системы называют ведущей, так как ее сигналы
используются для синхронизации ведомых станций. Измерение разности расстояний
до ведущей и ведомой станций, пропорциональной временному сдвигу сигналов от
станций А и В, позволяет найти лишь поверхность положения, соответствующую этой
разности и имеющую форму гиперболоида с фокусами в точках расположения станций
А и В. Если приемоиндикатора и станции А и В расположены на поверхности земли,
то измерение разности  позволяет получить линию положения на земной
поверхности в виде гиперболы с
позволяет получить линию положения на земной
поверхности в виде гиперболы с  = const (поэтому
= const (поэтому
разностно-дальномерные РНС носят
также название гиперболических). Для двух станций А и В можно построить
семейство гипербол с фокусами в точках расположения станций А и В. Расстояние
между ведущей и ведомой станциями называется базой. Для заданной базы
семейство гипербол можно нанести на карту, заранее оцифровать и
непосредственно использовать для местоопределения, что и делалось в первые годы
применения РНС. Однако одна пара станций позволяет определить лишь линию
положения, на которой расположен объект. Для определения его местоположения необходима
вторая пара станций, база которой d2 должна располагаться под углом к базе d1 первой пары (рис.
1.3). Обычно ведущая станция А является общей и синхронизирует работу обеих
ведомых станций В1 и В2. Сетка линий положения такой
системы образуется двумя семействами пересекающихся гипербол, позволяющих
найти местоположение объекта непосредственно по карте, если на нее нанесены
оцифрованные линии положения. Сейчас местоопределение осуществляется с помощью
приемоиндикаторов, представляющих собой приемник, сопряженный с вычислительным
 устройством и устройством отображения для непосредственного
считывания координат объекта.
устройством и устройством отображения для непосредственного
считывания координат объекта.
По точности разностно-дальномерный
метод местоопределения несколько уступает дальномерному с запросным сигналом,
но имеет бесспорное преимущество перед ним, обеспечивая неограниченную
пропускную способность, поскольку наземные станции
разностно- дальномерной системы
могут обслуживать любое число приемоиндикаторов, принимающих сигналы станций,
тогда как в дальномерной системе с запросом требуется конечное время для формирования
ответного сигнала. Это и ограничивает пропускную способность дальномерной
системы с запросным сигналом. Такое ограничение снимается при беззапросном
варианте дальномерного метода, но его осуществление связано с очень жесткими
требованиями к параметрам сигнала и устройствам его формирования и обработки.
Гиперболические линии положения
разностно-дальномерных РНС при расстояниях от центра базы, значительно
превышающих ее величину, аппроксимируется прямыми, исходящими из центра базы, в
результате чего разностно-дальномерная система может быть использована как
угломерная.
В зависимости от вида сигналов
наземных станций и методов измерения временного сдвига сигналов, принимаемых
приемоиндикатором, различают импульсные, фазовые и
импульсно-фазовые
разностно-дальномерные РНС.
Надо заметить, что с развитием
спутниковых РНС (СРНС) применение РНС наземного базирования существенно сократилось.
Однако некоторые системы, например сверхдлинноволновая РНС «Омега», в силу
уникальной возможности приема сигналов станций этой системы на некоторой
Глубине будут использоваться, пока существует потребность местоопределения
объектов под водой.
Комбинированный
угломерно-дальномерный метод. Достоинством этого метода является возможность
определять координаты объектов из одной точки, что и используется в PЛC, измеряющих наклонную дальность D, азимут  и угол места
и угол места  (рис. 1.4). Угол места
(рис. 1.4). Угол места  отсчитывается от горизонтальной плоскости до направления на
точку М расположения объекта. Азимут а отсчитывают от направления, принятого
за нулевое (например, северного), до проекции наклонной дальности на
горизонтальную плоскость. Путем
отсчитывается от горизонтальной плоскости до направления на
точку М расположения объекта. Азимут а отсчитывают от направления, принятого
за нулевое (например, северного), до проекции наклонной дальности на
горизонтальную плоскость. Путем
 пересчета непосредственно измеряемых координат D,
пересчета непосредственно измеряемых координат D,  и
и  в сферической системе координат можно
вычислить высоту Н и горизонтальную дальность
в сферической системе координат можно
вычислить высоту Н и горизонтальную дальность  , а при необходимости
перейти в другую СК (чаще всего прямоугольную). Определение местоположения
объектов из одной точки и с помощью одной станций является большим
преимуществом комбинированного метода, который кроме радиолокации широко
используется также в радиосистемах ближней навигации.
, а при необходимости
перейти в другую СК (чаще всего прямоугольную). Определение местоположения
объектов из одной точки и с помощью одной станций является большим
преимуществом комбинированного метода, который кроме радиолокации широко
используется также в радиосистемах ближней навигации.
Из рис. 1.4 видно, что точка М
расположения объекта является точкой пересечения вертикальной плоскости,
заданной азимутом а, конической поверхности, образующая которой составляет с
горизонтальной плоскостью угол  (а с осью вращения — угол
(а с осью вращения — угол  , и сферы с радиусом D и центром в точке расположения РЛС. Рассмотренные методы
определения местоположения относительно точек с известными координатами,
называемых радионавигационными точками (РНТ), с помощью поверхностей и линий
положения называются позиционными, как и РНС, в которых эти методы
используются. Кроме позиционных методов в навигации применяются методы
счисления пути интегрированием скорости, измеренной допплеровским,
корреляционным или воздушным измерителями, или ускорения, измеряемого
инерциальным измерителем. Применяются также обзорно-сравнительные методы,
основанные на сравнении телевизионных, радиолокационных и других изображений
местности с соответствующими картами.
, и сферы с радиусом D и центром в точке расположения РЛС. Рассмотренные методы
определения местоположения относительно точек с известными координатами,
называемых радионавигационными точками (РНТ), с помощью поверхностей и линий
положения называются позиционными, как и РНС, в которых эти методы
используются. Кроме позиционных методов в навигации применяются методы
счисления пути интегрированием скорости, измеренной допплеровским,
корреляционным или воздушным измерителями, или ускорения, измеряемого
инерциальным измерителем. Применяются также обзорно-сравнительные методы,
основанные на сравнении телевизионных, радиолокационных и других изображений
местности с соответствующими картами.
Используются и
корреляционно-экстремальные методы навигации, основанные на определении
структуры какого-либо физического поля, характерного для данной местности
(например, рельефа), и сравнении измеряемых параметров этого поля с соответствующими
параметрами, хранящимися в памяти измерительного устройства такой системы.
Преимуществами этих методов является автономность, малое влияние помех и
отсутствие накапливающихся погрешностей определения местоположения, что
свойственно инерциальным навигационным устройствам.
1.3. Классификация радиолокационных и
радионавигационных систем. Тактические и технические характеристики
Радиолокационные станции.
Радиолокационные станции (радиолокационные системы) принято классифицировать
по следующим признакам:
·
происхождение
радиосигнала, принимаемого приемником РЛС — активные (с активным ответным или
отраженным сигналом), полуактивные и пассивные;
·
используемый
диапазон радиоволн: декаметровый, метровый, дециметровый, сантиметровый и
миллиметровый диапазоны;
·
вид зондирующего
(излучаемого) сигнала: непрерывный немодулированный или модулированный по
частоте или фазе сигнал, импульсный (с большой и малой скважностью, когерентный
и некогерентный, с внутриимпульсной частотной или фазовой модуляцией);
·
число применяемых
каналов излучения и приема сигналов — одноканальные и многоканальные с
частотным или пространственным разделением каналов;
·
число и вид
измеряемых координат — одно-, двух- и трехкоoрдинатные;
·
способ измерения,
отображения и съема координат объекта;
·
место установки —
наземные, корабельные, самолетные, спутниковые;
·
функциональное
назначение: от миниатюрных допплеровских измерителей скорости движения
автомобилей до огромных наземных систем противовоздушной (ПВО) и
противоракетной (ПРО) обороны.
Перечислим основные типы
используемых РЛС и решаемые ими задачи.
Наземные РЛС:
·
обнаружения
воздушных целей и наведения на них истребителей;
·
управления воздушным
движением (обзорные и диспетчерские РЛС УВД);
·
обнаружения и
определения координат баллистических ракет и ИСЗ;
·
целеуказания
станциям управления зенитной артиллерией и зенитными управляемыми ракетами
(ЗУР);
·
управления зенитной
артиллерией и ЗУР;
·
определения
координат ведущих стрельбу артиллерийских орудий и минометов;
·
метеорологические и
исследования окружающей среды;
·
обзора акваторий
порта;
·
обзора летного поля
аэропортов;
·
обнаружения и
измерения скорости наземных подвижных объектов;
·
загоризонтного
обнаружения декаметрового диапазона.
Корабельные РЛС:
·
обеспечения
безопасного кораблевождения;
·
обнаружения
надводных объектов и низколетящих ЛА и крылатых ракет, определения их
координат;
·
обнаружения и
определения координат высоколетящих самолетов;
·
управления ЗУР и
зенитной артиллерией.
Самолетные РЛС:
·
обнаружения
самолетов и предотвращения столкновений;
·
панорамные РЛС
обзора земной поверхности;
·
перехвата и
прицеливания;
·
наведения
управляемых ракет;
·
бокового обзора (в
том числе с синтезированием апертуры);
·
подповерхностного
зондирования.
По существу радиолокационными
системами являются и устанавливаемые на самолетах и других ЛА высотомеры и
допплеровские измерители путевой скорости и угла сноса (ДИСС), использующие
сигналы, отраженные от поверхности, над которой перемещается самолет.
Радиолокационные станции
космического базирования размещаются на ИСЗ и других космических аппаратах.
Особенности таких станций связаны с большой скоростью перемещения относительно
земной поверхности и большим расстоянием от нее. Последнее обеспечивает большую
дальность радиогоризонта и слабое влияние отражений по боковым лепесткам ДНА.
При создании таких станций возникают специфические проблемы энергетического
обеспечения и размещения аппаратуры, особенно антенных систем с узкой и
управляемой ДНА. При размещении РЛС на средневысотных орбитах требуемая
мощность источника питания РЛС иногда достигает 30 кВт, что требует создания
мощных солнечных батарей.
Совершенствование элементной базы и
широкое применение цифровой обработки позволяет непрерывно улучшать параметры
РЛС, приближая их к потенциально возможным при заданных тактико-технических
ограничениях. Осуществилось создание многофункциональных РЛС
импульсно-допплеровского типа; РЛС с синтезированием апертуры инверсного типа;
РЛС с трехмерным изображением окружающего пространства; РЛС с селекцией медленно
движущихся объектов на фоне подстилающей поверхности. При этом все более широко
в РЛС используются фазированные антенные решетки (ФАР), позволяющие оперативно
изменять форму и параметры ДНА, что открывает дополнительные функциональные
возможности РЛС.
Перечисленные типы РЛС не
исчерпывают всех областей их применения. По мере совершенствования РЛС эти
области стремительно расширяются.
В последние годы нарастала
интенсивность освоения миллиметрового диапазона радиоволн для решения
различных радиолокационных задач. Примером может служить РЛС миллиметрового
диапазона для измерения кинематических характеристик артиллерийского снаряда
на начальном этапе полета. Радиолокационная станция работает в когерентном
режиме с использованием метода Допплера в интерферометрическом (фазовом)
варианте.
Широкое развитие получили методы
радиолокационного наблюдения поверхности Земли и других планет с ИСЗ и других
космических аппаратов. При этом используются широкополосные и
сверхширокополосные сигналы (с полосой, превышающей 25 % несущей частоты), что
вместе с синтезированием апертуры с автофокусировкой позволило довести
разрешающую способность таких РЛС до долей метра.
Радионавигационные системы.
Радионавигационные системы классифицируются по следующим признакам:
способ определения местоположения
объекта — позиционные (угломерные, дальномерные, разностно-дальномерные, комбинированные);
использующие счисление пути интегрированием скорости и ускорения; основанные на
обзорно-сравнительных методах местоопределения;
вид несущего информацию и
непосредственно измеряемого системой параметра радиосигнала — амплитудные,
частотные, фазовые и импульсно-фазовые;
диапазон используемых радиоволн: от
декакилометровых, применяемых в сверхдлинноволновые РНС, до оптических, используемых
в лазерных системах местоопределения;
дальность действия систем —
космические, глобальные, дальней и ближней навигации;
место расположения опорных станций
— системы наземного и космического базирования.
Основные параметры системы
составляют ее ТТХ. Перечень параметров зависит от назначения системы, но часть
из них, относящихся к основным, в той или иной форме входят в ТТХ любых РНС и
РЛС. Однако в зависимости от назначения радиосистемы смысловое содержание
некоторых характеристик может изменяться, поэтому целесообразно дать
определения основных параметров, составляющих тактико-техническую
характеристику системы.
Тактические характеристики.
Тактическими называются характеристики системы, определяющие ее функциональные
возможности при практическом, в том числе и военном, применении (откуда и
произошло название «тактические характеристики»).
К основным тактическим
характеристикам РЛС и РНС относятся:
зона (область) действия, или
рабочая зона, системы, заданная сектором обзора (поиска) по измеряемым
системой параметрам;
·
время обзора
(поиска) заданного сектора, или скорость обзора;
·
определяемые
параметры (координаты), их число и точность измерения;
·
разрешающая
способность по соответствующим координатам;
·
пропускная
способность;
·
помехозащищенность;
·
надежность
функционирования.
Поскольку эти параметры широко
используются для оценки качества функционирования различных систем, приведем их
общие определения, которые в дальнейшем могут быть уточнены применительно к
конкретным типам РЛС и РНС.
Зоной действия, или рабочей
областью, системы называется часть пространства, в которой система надежно
выполняет функции, соответствующие ее назначению. Для РЛС обнаружения зоной действия
является область пространства, в которой объекты с определенными
характеристиками отражения обнаруживаются с заданными вероятностями ошибок:
ложной тревоги  и пропуска сигнала
и пропуска сигнала  .
.
Для РЛС точного измерения координат
и РНС границы рабочей зоны характеризуются допустимыми погрешностями место-
определения объектов.
Почти всегда одним из параметров,
определяющих рабочую зону, является дальность действия системы.
Под дальностью действия системы
понимают максимальное расстояние, на котором обеспечивается получение основных
показателей системы не хуже заданных. Чаще всего максимальная дальность
действия системы зависит от допустимой погрешности при измерении координат и
параметров движения объектов. Под дальностью действия РЛС обнаружения имеют в
виду максимальную дальность, на которой отношение сигнала к шуму еще достаточно
для его обнаружения с заданными качественными показателями.
Иногда зона действия ограничена и
со стороны минимальных значений дальности. В этих случаях РТС характеризуется
двумя параметрами: минимальной  и максимальной
и максимальной  дальностями действия.
дальностями действия.
Временем обзора (поиска) называется
время, необходимое для однократного обзора заданной зоны действия системы при
заданном качестве. Это время связано с маневренностью наблюдаемых или
управляемых объектов, объемом пространства обзора, уровнем сигнала и помех, а
также рядом тактических и технических характеристик системы.
Точность системы характеризуется
погрешностями измерения координат и параметров движения объекта. Причинами
погрешностей являются несовершенство применяемого метода измерения и
измерительной аппаратуры, влияние внешних условий и радиопомех, субъективные
качества оператора, если процессы получения информации и ее реализации не
автоматизированы. Требования к точности системы зависят от ее назначения. Неоправданное
завышение требований к точности приводит к усложнению системы, удорожанию ее
разработки, производства и эксплуатации, а иногда и снижению надежности
функционирования.
Разрешающей способностью системы
называется способность раздельного обнаружения, измерения параметров двух или
нескольких близко расположенных в пространстве (или отличающихся по скорости)
объектов, раздельного их отображения, а возможно и управления ими.
Различают разрешающую способность
по дальности и угловым координатам, а также по соответствующим составляющим
скорости. Разрешающую способность количественно принято оценивать минимальной
разностью значений измеряемых параметров соседних объектов, при которой они
воспринимаются системой раздельно, т.е. по каждому объекту принимается решение
о его обнаружении и измерении параметров с показателями качества не хуже
заданных. Для ряда типов РЛС разрешающая способность является основной
характеристикой, определяющей качество системы.
В радионавигации обычно определяют
собственные координаты объекта (единственного для измерителя) и понятие
разрешающей способности часто связывают с возможностью разделения сигнала,
несущего полезную информацию о координатах объекта с различными помехами
(отражениями от ионосферы, местных предметов и т.п.), подобными по форме
полезному сигналу, но достоверной информации об определяемых координатах не содержащими.
При обнаружении сигналов от
полезных объектов на фоне таких сигналоподобных помех разрешающая способность
системы становится важнейшей характеристикой.
Пропускная способность
характеризуется числом объектов, обслуживаемых системой одновременно или в
единицу времени. Пропускная способность зависит от принципа действия системы и
ряда ее тактических и технических параметров, в частности рабочей зоны,
точности и разрешающей способности. Радионавигационные системы, в которых
используется одна линия связи (разностно-дальномерная или угломерная
радиомаячного типа), обладают неограниченной пропускной способностью, так как
могут одновременно обслуживать любое число объектов.
Пропускная способность дальномерных
систем, основанных на использовании двух линий связи запросного и ответного
сигналов, как уже отмечалось, ограничена ответчиком, в котором для
формирования ответного сигнала на каждый запрос необходимо некоторое время. В
этом случае пропускную способность характеризуют вероятностью обслуживания
заданного числа объектов при заданном периоде повторения запросов каждым из
объектов, находящихся в рабочей зоне системы.
Эти определения используются для
оценки пропускной способности радиолокационных и радионавигационных систем при
их практическом применении, например при управлении воздушным движением.
Однако любая РТС содержит один или несколько каналов связи и, следовательно,
всегда существуют ограничения пропускной способности канала связи, определяемые
его полосой пропускания и энергетическими характеристиками полезного сигнала
и помехи.
Помехозащищенность PЛC и РНС — способность выполнения ими заданных функций при
воздействии непреднамеренных и специально организованных помех.
Помехозащищенность определяется скрытностью работы системы и ее
помехоустойчивостью. Под скрытностью системы понимают показатель,
характеризующий трудность обнаружения ее работы и определения параметров
используемых сигналов, а следовательно, и создания при необходимости специально
организованных (прицельных) помех. Скрытность обеспечивается применением
остронаправленного и по возможности кратковременного излучения сигнала в
каждом направлении, использованием шумоподобных широкополосных сигналов с
низким уровнем мощности, изменением основных параметров сигнала во времени
(законов модуляции и несущей частоты).
Количественной оценкой
помехоустойчивости РЛС и РНС является отношение энергии сигнала к спектральной
плотности мощности (СПМ) помехи на входе приемника в полосе частот, занимаемой
сигналом, при котором погрешность измерения заданного параметра не превосходит
допустимой с требуемой вероятностью. Для РЛС обнаружения при этом должно
обеспечиваться обнаружение сигнала с заданной вероятностью правильного обнаружения
р по при допустимых значениях вероятности ложной тревоги рПТ.
Требуемая помехоустойчивость достигается рациональным выбором параметров
радиосигнала системы, характеристик ДНА и устройств приема и обработки сигнала.
Надежность — свойство системы и
входящих в нее устройств сохранять во времени в установленных пределах значения
параметров, характеризующих способность выполнения требуемых функций в
заданных режимах и условиях применения, хранения и транспортировки.
В зависимости от причин, вызывающих
отказы в работе системы, различают следующие разновидности надежности:
·
аппаратная,
связанная с состоянием аппаратуры;
·
программная,
обусловленная состоянием программ вычислительных устройств, используемых в системе;
·
функциональная, т.е.
надежность выполнения отдельных функций, возлагаемых на систему, и, в
частности, извлечения, передачи и обработки информации. В этом смысле
помехозащищенность также может быть отнесена к функциональной надежности
радиосистемы.
Экономические показатели системы,
масса и габариты составляющих ее устройств являются важными параметрами,
влияющими на совокупную оценку качества системы.
Технические характеристики. К
основным техническим характеристикам радиосистемы относятся параметры,
непосредственно определяющие ее тактические характеристики и возможности
применения. Применительно к РЛС и РНС основными техническими характеристиками
являются:
·
метод обзора
(поиска) и измерения координат и параметров движения объектов;
·
рабочие частоты, их
стабильность, мощность излучения, вид модуляции, ширина спектра излучаемых
колебаний;
·
форма и ширина ДНА,
ее коэффициент направленности;
·
чувствительность,
динамический диапазон и полоса пропускания приемника;
·
вид и параметры
устройств отображения и съема информации;
·
потребление энергии
устройствами, входящими в систему, их масса и габаритные размеры.
В дальнейшем взаимосвязь
тактических и технических характеристик будет обсуждаться для конкретных типов
РЛС и РНС.
1.4.
Структурная схема РЛС кругового обзора.
Основные характеристики
Различают РЛС, построенные по
некогерентной и когерентной схемам. В первом случае отдельные зондирующие
импульсы некогерентны между собой, начальные фазы их несущих частот случайны,
независимы между собой и равномерно распределены в интервале что делает
невозможным синфазное суммирование пачки импульсов на радиочастоте. Решение об
обнаружении отраженного целью сигнала в таких РЛС принимается либо на основе
приема одиночного импульса, либо на основе приема пачки импульсов с
суммированием после амплитудного детектирования. В когерентных РЛС фазовые
соотношения между отдельными импульсами сохраняются неизменными на
определенном интервале времени, что позволяет осуществлять их когерентное
накопление в приемнике радиолокатора. Как известно, когерентное суммирование
пачки импульсов обеспечивает больший выигрыш в отношении сигнал/шум, чем
некогерентное. Кроме того, когерентные РЛС позволяют с высокой точностью
измерять допплеровское смещение частоты отраженного движущейся целью сигнала и
эффективно осуществлять селекцию движущихся целей (СДЦ) на фоне пассивных помех
естественного и искусственного происхождения.
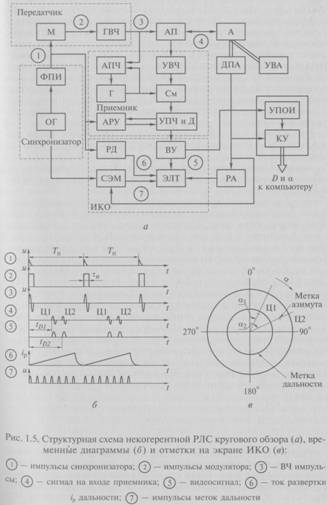
Рассмотрим принцип действия и
взаимодействие элементов некогерентной РЛС кругового обзора, структурная схема
которой представлена на рис. 1.5, а.
Такие станции позволяют
обнаруживать цели, определять их дальность D и азимут а в процессе непрерывного обзора пространства
вокруг станции, ограниченного максимальной дальностью РЛС  и шириной ДНА по
углу места
и шириной ДНА по
углу места  . Диаграмма направленности антенны вращается с постоянной
скоростью, осуществляя за время одного оборота Т0 круговой обзор по
азимуту. Принимаемые приемником РЛС сигналы, отраженные целями (Ц), с выхода
приемника подаются на управляющий электрод электроннолучевой трубки (ЭЛТ)
индикатора кругового обзора (ИКО), линия развертки которого вращается
синхронно с вращением ДНА (рис. 1.5, б). Момент излучения зондирующего импульса
антенной (А) определяет начало развертки дальности, а азимутальное положение
линии развертки совпадает с положением оси ДНА. Отраженный от цели сигнал
после преобразования, усиления и детектирования в приемнике РЛС модулирует
электронный луч ЭЛТ по интенсивности (яркости), подсвечивая точку развертки,
соответствующую временной задержке сигнала от цели, т.е. ее дальности.
. Диаграмма направленности антенны вращается с постоянной
скоростью, осуществляя за время одного оборота Т0 круговой обзор по
азимуту. Принимаемые приемником РЛС сигналы, отраженные целями (Ц), с выхода
приемника подаются на управляющий электрод электроннолучевой трубки (ЭЛТ)
индикатора кругового обзора (ИКО), линия развертки которого вращается
синхронно с вращением ДНА (рис. 1.5, б). Момент излучения зондирующего импульса
антенной (А) определяет начало развертки дальности, а азимутальное положение
линии развертки совпадает с положением оси ДНА. Отраженный от цели сигнал
после преобразования, усиления и детектирования в приемнике РЛС модулирует
электронный луч ЭЛТ по интенсивности (яркости), подсвечивая точку развертки,
соответствующую временной задержке сигнала от цели, т.е. ее дальности.
Сигналы, отраженные от цели,
поступают на вход приемника в течение времени поворота ДНА на угол, равный ее
ширине аА по
азимуту. За это время будет принята пачка импульсов, число которых
 определяется шириной ДНА аА, временем обзора Т0 и
периодом повторения зондирующих импульсов Тп. Каждый из сигнальных импульсов
подсвечивает точку на соответствующей линии развертки.
определяется шириной ДНА аА, временем обзора Т0 и
периодом повторения зондирующих импульсов Тп. Каждый из сигнальных импульсов
подсвечивает точку на соответствующей линии развертки.
При приеме пачки импульсов  на экране ЭЛТ
создается отметка цели в виде дужки с протяженностью по азимуту
на экране ЭЛТ
создается отметка цели в виде дужки с протяженностью по азимуту  , середина
, середина
 которой соответствует азимуту цели а, а ее расстояние от
центра экрана (начала развертки)
которой соответствует азимуту цели а, а ее расстояние от
центра экрана (начала развертки)
— дальности D (рис. 1.5, в). Таким образом, протяженность отметки на
экране И КО по азимуту определяется шириной ДНА  (если размеры цели малы сравнительно с
линейной шириной ДНА
(если размеры цели малы сравнительно с
линейной шириной ДНА  и цель можно считать точечной), а протяженность по дальности
(вдоль линии развертки) — скоростью развертки и длительностью принимаемого сигнала.
Протяженность отметки целей на экране И КО непосредственно связана с разрешающей
способностью по дальности, азимуту (угловой разрешающей способностью) и
скоростью развертки. Увеличение скорости развертки И КО позволяет улучшить
разрешающую способность PJIC, но при этом сокращаются пределы измеряемой
дальности (шкалы дальности) индикатора, поэтому в ИКО предусматривается
несколько шкал дальности, что позволяет обеспечить измерение дальности в
заданных пределах й повысить четкость изображения на экране ИКО переходом на
более крупный масштаб. Для пояснения взаимодействия элементов структурной
схемы PЛC воспользуемся временными диаграммой, представленной на рис.
1.5, б.
и цель можно считать точечной), а протяженность по дальности
(вдоль линии развертки) — скоростью развертки и длительностью принимаемого сигнала.
Протяженность отметки целей на экране И КО непосредственно связана с разрешающей
способностью по дальности, азимуту (угловой разрешающей способностью) и
скоростью развертки. Увеличение скорости развертки И КО позволяет улучшить
разрешающую способность PJIC, но при этом сокращаются пределы измеряемой
дальности (шкалы дальности) индикатора, поэтому в ИКО предусматривается
несколько шкал дальности, что позволяет обеспечить измерение дальности в
заданных пределах й повысить четкость изображения на экране ИКО переходом на
более крупный масштаб. Для пояснения взаимодействия элементов структурной
схемы PЛC воспользуемся временными диаграммой, представленной на рис.
1.5, б.
Устройством, обеспечивающим
согласованную во времени работу (синхронизацию) всех элементов PJIC, является синхронизатор
(см. рис. 1.5, а), состоящий из высокостабильного опорного генератора (ОГ),
колебания которого заданной частоты и формы (обычно синусоидальной)
используются для формирования пусковых импульсов (ФПИ). Эти импульсы имеют
требуемую частоту повторения Fn и используются для
запуска модулятора (М) и схемы развертки дальности (РД).
Импульсы модулятора определяют
длительность  и частоту повторения Fn высокочастотных
импульсов, формируемых генератором высокой частоты (ГВЧ), которые через
антенный переключатель (АП) поступают к излучателю антенной системы, формирующей
требуемую диаграмму направленности. На время излучения импульса АП блокирует
вход приемника, защищая его от воздействия мощных колебаний. По окончании
излучения импульса через некоторое время
и частоту повторения Fn высокочастотных
импульсов, формируемых генератором высокой частоты (ГВЧ), которые через
антенный переключатель (АП) поступают к излучателю антенной системы, формирующей
требуемую диаграмму направленности. На время излучения импульса АП блокирует
вход приемника, защищая его от воздействия мощных колебаний. По окончании
излучения импульса через некоторое время  чувствительность приемного устройства
восстанавливается и PJ1C переходит в режим приема отраженных сигналов. Таким образом,
длительность зондирующего импульса
чувствительность приемного устройства
восстанавливается и PJ1C переходит в режим приема отраженных сигналов. Таким образом,
длительность зондирующего импульса  и время восстановления чувствительности
и время восстановления чувствительности
 ограничивают минимальную дальность действия (мертвую зону)
РЛС:
ограничивают минимальную дальность действия (мертвую зону)
РЛС:
 Радиосигнал, принятый от цели, усиливается усилителем высокой
частоты (УВЧ) приемника непосредственно на радиочастоте принимаемого сигнала fc, которая при наличии радиальной скорости
цели
Радиосигнал, принятый от цели, усиливается усилителем высокой
частоты (УВЧ) приемника непосредственно на радиочастоте принимаемого сигнала fc, которая при наличии радиальной скорости
цели  отличается на
величину допплеровского смещения
отличается на
величину допплеровского смещения
 от несущей частоты излучаемого импульса fи.
Знак плюс соответствует приближению цели, а минус — ее удалению. Основное усиление
сигнала осуществляется усилителем промежуточной частоты (УПЧ) на частоте fпч.
Переход на fпч осуществляется с помощью преобразователя, состоящего из
смесителя (См) и гетеродина (Г). Применение автоматической подстройки частоты
(АПЧ) гетеродина обеспечивает равенство частоты сигнала после смесителя fпч
частоте настройки УПЧ fп.ч0. АПЧ необходима, поскольку обычно в PЛC кругового обзора в качестве ГВЧ используется магнетрон,
обеспечивающий наиболее экономичный способ получения мощных высокочастотных
колебаний в сантиметровом диапазоне радиоволн. Недостатком магнетронного
генератора является недостаточная стабильность частоты генерируемых колебаний
и их некогерентность от импульса к импульсу. Последнее и заставляет
осуществлять подстройку частот гетеродина fг под частоту колебаний fи
при излучении каждого импульса.
от несущей частоты излучаемого импульса fи.
Знак плюс соответствует приближению цели, а минус — ее удалению. Основное усиление
сигнала осуществляется усилителем промежуточной частоты (УПЧ) на частоте fпч.
Переход на fпч осуществляется с помощью преобразователя, состоящего из
смесителя (См) и гетеродина (Г). Применение автоматической подстройки частоты
(АПЧ) гетеродина обеспечивает равенство частоты сигнала после смесителя fпч
частоте настройки УПЧ fп.ч0. АПЧ необходима, поскольку обычно в PЛC кругового обзора в качестве ГВЧ используется магнетрон,
обеспечивающий наиболее экономичный способ получения мощных высокочастотных
колебаний в сантиметровом диапазоне радиоволн. Недостатком магнетронного
генератора является недостаточная стабильность частоты генерируемых колебаний
и их некогерентность от импульса к импульсу. Последнее и заставляет
осуществлять подстройку частот гетеродина fг под частоту колебаний fи
при излучении каждого импульса.
Полоса пропускания УПЧ определяет
обычно и полосу пропускания всего приемного устройства, которая должна быть согласована
с шириной спектра сигнала. При простом импульсном сигнале ширина его спектра
определяется длительностью и обычно принимается равной 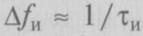 . Из статистической теории радиосистем известно, что при
фиксированном отношении энергии сигнала к спектральной плотности мощности
нормального белого шума ширина спектра сигнала определяет разрешающую
способность и точность при измерении дальности. Улучшение этих характеристик
связано также с расширением полосы пропускания приемного устройства (более
подробно это рассмотрено в гл. 4).
. Из статистической теории радиосистем известно, что при
фиксированном отношении энергии сигнала к спектральной плотности мощности
нормального белого шума ширина спектра сигнала определяет разрешающую
способность и точность при измерении дальности. Улучшение этих характеристик
связано также с расширением полосы пропускания приемного устройства (более
подробно это рассмотрено в гл. 4).
После детектирования импульсных
радиосигналов детектором (Д) выделяются их огибающие, называемые обычно
видеоимпульсами. После усиления видеоусилителем (ВУ) эти импульсы подаются на
управляющий электрод ЭЛТ (сетку или катод в зависимости от полярности
импульсов), обеспечивая модуляцию электронного луча по интенсивности (яркости
отметки на экране).
Радиально-круговая развертка,
применяемая в И КО, формируется с помощью схем развертки по дальности (РД) и
по азимуту (РА). Чаще всего в И КО используют ЭЛТ с электромагнитным
отклонением, поэтому для линейного отклонения луча ЭЛТ по радиусу схемой РД
создается линейно нарастающий ток во взаимно перпендикулярных отклоняющих
катушках. Вращение ДНА достигается соответствующей модуляцией амплитуды этого
тока с помощью схемы РА, управляемой от датчика положения диаграммы
направленности антенны.
В РЛС кругового обзора чаще всего
используются антенны рефлекторного типа, в которых для формирования ДНА
используется рефлектор параболической формы. Зондирующий сигнал подается на
излучатель, размещаемый в фокусе отражателя. Возможно получить вращающуюся ДНА
и при неподвижной антенной системе, состоящей из трех ФАР с электронным
управлением положением ДНА. Однако этот способ формирования вращающейся ДНА
сложнее и поэтому применяется значительно реже.
Для измерения дальности на экране
ИКО формируются метки дальности в виде светящихся колец, расстояние между
которыми зависит от периода повторения импульсов, формируемых схемой электронных
меток (СЭМ). Специальной схемой формируются и электронные метки азимута в виде
импульсов, подсвечивающих более ярко линии развертки через заданные интервалы
по азимуту (например, через 10°).
Видеосигналы с выхода приемника
поступают на устройство первичной обработки информации (УПОИ), выделяющее сигналы
целей из помех. Первичная обработка может быть осуществлена непосредственно в
аналоговом виде или после преобразования сигналов в цифровую форму. При
необходимости построения траекторий движения целей осуществляется вторичная
обработка информации вычислительным устройством после преобразования сигналов в
цифровую форму кодирующим устройством (КУ). Траектория может наблюдаться и
непосредственно на экране ИКО, благодаря большому времени послесвечения фосфоресцирующего
слоя экрана ЭЛТ, возбуждаемого вспышками флуоресцирующего слоя при воздействии
электронного луча. Время послесвечения существенно превышает время однократного
обзора Т0, и остаточные метки сохраняются на два-три оборота
антенны РЛС, что и позволяет судить о перемещении отметки на экране ИКО.
Отличие когерентной схемы
построения РЛС заключается в том, что при формировании излучаемого сигнала и
его приеме используются одни и те же высокостабильные ВЧ и СВЧ генераторы,
число которых определяется числом преобразований частоты в приемнике.
Структурная схема когерентно-импульсной РЛС с двойным преобразованием частоты
представлена на рис. 1.6, на котором с целью унификации многие функциональные
блоки сохранили обозначение, принятое для некогерентной РЛС, представленной
на рис. 1.5.
Выходной сигнал высокостабильного
ГВЧ поступает на модулятор (М), на второй вход которого подается модулирующее
напряжение в виде последовательности видеоимпульсов длительностью  с периодом Тп. На выходе модулятора формируется последовательность
радиоимпульсов с несущей частотой fп.
ч, которые после
преобразования «вверх» на рабочую частоту РЛС, в смесителе (СМ1) усиливаются в
усилителе мощности (УМ) и через
с периодом Тп. На выходе модулятора формируется последовательность
радиоимпульсов с несущей частотой fп.
ч, которые после
преобразования «вверх» на рабочую частоту РЛС, в смесителе (СМ1) усиливаются в
усилителе мощности (УМ) и через
 антенный переключатель (АП) поступают в антенну (А) (график
антенный переключатель (АП) поступают в антенну (А) (график  на рис. 1.6, б). Для преобразования частоты сигнала в СМ1 в
качестве опорного используется сигнал гетеродина СВЧ (Г). Этот же сигнал Г
используется в смесителе (СМ2) для преобразования «вниз» частоты принимаемых
антенной сигналов, отраженных от целей и усиленных в УВЧ (график
на рис. 1.6, б). Для преобразования частоты сигнала в СМ1 в
качестве опорного используется сигнал гетеродина СВЧ (Г). Этот же сигнал Г
используется в смесителе (СМ2) для преобразования «вниз» частоты принимаемых
антенной сигналов, отраженных от целей и усиленных в УВЧ (график  на рис. 1.6, б). В общем случае при наличии допплеровского
сдвига частоты отраженного сигнала Fv несущая частота
принимаемых импульсов после преобразования в СМ2 становится равной fп ч + Fv. Отличительной чертой когерентной РЛС
является наличие квадратурного фазового детектора (КФД), содержащего два
идентичных фазовых детектора (ФД1 и ФД2) взамен амплитудного детектора (Д) в
некогерентной схеме. В качестве опорных сигналов квадратурных (косинусного и
синусного) каналов КФД используются прямой (косинусный) и сдвинутый в фазовращатель
(ФВ) на 90° (синусный) сигналы, полученные из выходного сигнала ГВЧ. При
совпадении частот принимаемого и опорного сигналов амплитуды выходных сигналов
ФД1 и ФД2 постоянны и пропорциональны косинусу и синусу разности фаз
принимаемого и опорного сигналов. На графиках
на рис. 1.6, б). В общем случае при наличии допплеровского
сдвига частоты отраженного сигнала Fv несущая частота
принимаемых импульсов после преобразования в СМ2 становится равной fп ч + Fv. Отличительной чертой когерентной РЛС
является наличие квадратурного фазового детектора (КФД), содержащего два
идентичных фазовых детектора (ФД1 и ФД2) взамен амплитудного детектора (Д) в
некогерентной схеме. В качестве опорных сигналов квадратурных (косинусного и
синусного) каналов КФД используются прямой (косинусный) и сдвинутый в фазовращатель
(ФВ) на 90° (синусный) сигналы, полученные из выходного сигнала ГВЧ. При
совпадении частот принимаемого и опорного сигналов амплитуды выходных сигналов
ФД1 и ФД2 постоянны и пропорциональны косинусу и синусу разности фаз
принимаемого и опорного сигналов. На графиках  и
и  (см. рис. 1.6, б) этому соответствуют
линии Fv= 0 (неподвижная цель). Допплеровский сдвиг
частоты принимаемого сигнала приводит к появлению на выходе ФД1 и ФД2 сигналов,
амплитуды которых изменяются во времени с частотой Fv при относительных
сдвигах по фазе в квадратурных каналах на ±90° в зависимости от знака частотного
смещения Fv (линии FVi, графики
(см. рис. 1.6, б) этому соответствуют
линии Fv= 0 (неподвижная цель). Допплеровский сдвиг
частоты принимаемого сигнала приводит к появлению на выходе ФД1 и ФД2 сигналов,
амплитуды которых изменяются во времени с частотой Fv при относительных
сдвигах по фазе в квадратурных каналах на ±90° в зависимости от знака частотного
смещения Fv (линии FVi, графики  и
и  на рис. 1.6, б).
на рис. 1.6, б).
Назначение блоков ФПИ, АРУ, УВА и
ДПА в структурной схеме когерентной РЛС аналогично приведенным на рис. 1.5, а в
схеме некогерентной РЛС.
Выходные сигналы ФД1 и ФД2,
образующие квадратурную пару сигналов, преобразуются в цифровую форму с помощью
аналого-цифровых преобразователей АЦП 1 и АЦП2. Тактовая частота преобразования
fAЦП определяется ФПИ таким образом, чтобы выполнялись
условия теоремы Котельникова, в соответствии с которой на каждый отраженный
импульс от цели должно приходиться не менее двух выборок по каждому
квадратурному каналу: 
Согласованная или иная первичная
обработка отраженных сигналов осуществляется в высокопроизводительном цифровом
сигнальном процессоре (ЦСП), в котором имеются оперативное запоминающее
устройство (ОЗУ) для записи и хранения данных и ОЗУ для записи и хранения
программ обработки сигналов. Как правило, адресация данных ОЗУ организована по
матричному принципу так, что преобразованные в цифровую форму отсчеты сигналов
АЦП1 и АЦП2 на каждом периоде зондирования записываются в отдельные строки,
причем в ячейках ОЗУ хранятся квадратурные составляющие, образующие отсчеты
комплексного сигнала. Считывание комплексных отсчетов сигнала осуществляется
по столбцам, которые соответствуют дальномерным каналам. Далее для каждого
дальномерного канала выполняется допплеровский спектральный анализ или иная
обработка в соответствии с выбранным алгоритмом, хранящимся в ОЗУ программ.
Обычно число дальномерных каналов обзорной PJIC велико и может достигать нескольких тысяч, поэтому к ЦСП
предъявляются высокие требования по быстродействию для обеспечения обработки
сигналов в реальном масштабе времени поступления входной информации.
Современные сигнальные процессоры ведущих мировых производителей обеспечивают
быстродействие от нескольких сотен до тысячи и более MFlop (миллионов операций
в секунду типа «умножение — суммирование» с плавающей точкой).
Координаты и значения радиальных
скоростей, обнаруженных в результате первичной обработки целей, передаются в
управляющую ЭВМ, на базе которой осуществляется вторичная траекторная обработка
сигналов и привязка радиолокационного изображения к электронной карте
местности. Полученное изображение фиксируется на индикаторе, который входит
вместе с ЦСП и управляющей ЭВМ в устройство цифровой обработки информации
(УЦОИ).
При размещении PJIC на подвижном носителе отображение информации на индикаторе
может быть организовано в двух режимах: относительного движения, когда
неподвижные объекты и электронная карта перемещаются на индикаторе, a PЛC имеет неизменное положение; и абсолютного движения, когда
неподвижные объекты и электронная карта неподвижны, а по индикатору
перемещается носитель PЛC, координаты которого
определяются с помощью бортовых навигационных систем. В обоих режимах
требуемое изображение синтезируется на компьютерном индикаторе с помощью
специальных программ, хранящихся в управляющей ЭВМ.
К достоинствам применения
перепрограммируемых ЦСП относится возможность оперативной смены алгоритма
обработки сигналов в зависимости от изменяющейся сигнально-помеховой
обстановки, условий применения PJIC или решаемых ею
функциональных задач.
В приведенной на рис. 1.6
когерентной PЛC возможно применение сложномодулированных сигналов с
внутриимпульсной модуляцией частоты или фазы. Структурная схема PJIC остается практически неизменной, усложняется лишь
функциональная нагрузка на ФПИ, модулятор и ЦСП.
Преимущества, которыми обладают
когерентные PJIC, стимулирует поиск и разработку технологий когерентной
обработки отраженных сигналов в некогерентных РЛС различного назначения.
Суть этих технологий заключается в
запоминании не только частоты (блок АПЧ на рис. 1.5, а), но и начальной фазы
зондирующего импульса, излучаемого некогерентным передатчиком. Внедрение
подобных технологий стало возможным благодаря развитию цифровой техники обработки
сигналов. В этом случае начальная фаза излученного импульса на каждом периоде
зондирования записывается в память ЦСП с привязкой к единой шкале времени на
интервале когерентного накопления. Затем при межпериодной обработке
осуществляется фазовая коррекция отраженных импульсов, в результате чего они
становятся когерентными. Радиолокаторы, построенные по такому принципу,
называются РЛС с искусственной когерентностью. Технологии обеспечения
искусственной когерентности целесообразно применять на этапе модернизации
серийно выпускаемых и эксплуатируемых некогерентных РЛС с магнетронными
передатчиками, однако следует иметь в виду, что качество когерентности зависит
от типа приемной и передающей аппаратуры РЛС.
На примере РЛС кругового обзора
легко проследить взаимосвязь ее основных тактических и технических
характеристик. Максимальная дальность действия Dmax связана с энергией
зондирующего импульса ЕИ, а также мощностью порогового сигнала Pc min (чувствительностью приемника РЛС) и
коэффициентом различимости ИКО, представляющим собой отношение сигнала к шуму,
минимально достаточное для его обнаружения на экране ИКО (или после УПОИ при
автоматическом съеме информации) с заданной надежностью, т.е. с заданными
значениями вероятности правильного обнаружения рп.о и вероятности ложной тревоги рлТ. Максимальная дальность действия зависит также от параметров
антенны, отражающих свойств цели и условий распространения радиоволн.
Связь максимальной дальности с
основными параметрами характеризуется основным уравнением радиолокации,
рассмотрению которого посвящена гл. 3.
Разрешающая способность по
дальности ограничена шириной спектра зондирующего сигнала и полосой пропускания
приемника, а также длительностью развертки (шкалой дальности) ИКО и
разрешающей способностью используемой в нем ЭЛТ. Эти параметры влияют и на
точность измерения дальности. Точность и разрешающая способность при измерении
азимута РЛС кругового обзора связаны с шириной ДНА, определяемой величиной относительной
апертуры антенной системы, т.е. отношением ее размера к длине волны излучаемых
колебаний.
Взаимосвязь тактических и
технических характеристик будет рассмотрена более подробно при изучении
различных систем радиолокации и радионавигации.
1.5. Многопозиционные
радиолокационные системы
Радиолокационные системы,
передающие и приемные антенны которых располагаются в одном месте либо
использующие одну антенну, коммутируемую с передачи на прием сигналов,
называются моностатическими, или однопозиционными. В отличие от них
многопозиционные радиолокационные системы (МПРЛС) могут объединять работу
независимых однопозиционных систем, бистатических и пассивных систем (приемных
устройств), располагающихся в различных точках пространства (позициях),
разнесенных на расстояния d.
Бистатинеская система состоит из
передающего и приемного устройств, разнесенных на расстояние d.
Эта система может иметь один
передатчик в точке А (рис. 1.7) и несколько приемников в точках В, С, D на расстояниях от передатчика dAB, dAC и dAD, являющихся базами. Такая бистатическая система будет уже
многопозиционной, но ее можно считать также состоящей из трех бистатических
систем.
В общем случае МПРЛС может включать
радиолокационные устройства, использующие различные методы определения местоположения
и параметров движения целей. При этом на позициях может размещаться аппаратура
активных независимых систем, полуактивных или пассивных систем. На рис. 1.8
приведена обобщенная структурная схема МПРЛС, включающей различную аппаратуру,
располагающуюся на позициях П1, П2 и ПЗ, каналы передачи информации (И) и
синхронизации (С), а также пункт сбора и совместной обработки информации (ПОИ),
поступающей от разнесенных в пространстве устройств.
Совместная обработка информации в
МПРЛС имеет ряд преимуществ по сравнению с однопозиционными системами: более
гибкое формирование зон обзора (рабочих зон) системы, повышение

точности определения координат и
параметров движения целей, улучшение разрешения и распознавания обнаруженных целей,
повышение помехозащищенности от активных и пассивных помех. В результате МПРЛС
обеспечивают более надежное выполнение тактических задач и обладают большей
живучестью. Конечно, эти преимущества достигаются усложнением и удорожанием
системы. В зависимости от решаемых задач в МПРЛС используют первичную,
вторичную и третичную обработки радиолокационной информации (РЛИ). При
первичной обработке производится обнаружение целей, определение их координат и
составляющих вектора скорости. Вторичная обработка заключается в построении
траекторий целей на основе данных, полученных на одной или нескольких позициях
системы. Третичная обработка предполагает объединение и отождествление
траекторных данных. Подробнее вопросы обработки РЛИ рассмотрены в гл. 14.В
зависимости от использования фазовой информации, содержащейся в сигналах,
приходящих от целей и принимаемых на различных позициях, различают
пространственно-когерентные, пространственно-некогерентные системы и системы с
кратковременной пространственной когерентностью.
В пространственно-когерентных
системах фазовые соотношения в каналах передачи и обработки сигналов,
поступающих с различных позиций, поддерживаются неизменными в течение времени,
значительно превышающего длительность сигнала. Такие системы называются истинно
когерентными, и отдельные позиции таких систем можно уподобить элементам ФАР,
разнесенным на большие расстояния. В пространственно-некогерентных системах
совместная обработка сигналов осуществляется после их детектирования на
отдельных позициях. Это упрощает МПРЛС, так как исключает необходимость
синхронизации работы аппаратуры системы по частоте и фазе. В системах с
кратковременной пространственной когерентностью неизменность фазовых
соотношений сохраняется только в пределах длительности принимаемых сигналов
(псевдокогерентные системы).В зависимости от вида когерентности сигналов при их
совместной обработке различают три вида объединения РЛИ: когерентное,
некогерентное (видеосигналов) и объединение траекторий. При когерентном
объединении с отдельных позиций МПРЛС на ПОИ передаются радиочастотные сигналы,
позволяющие осуществлять операции обнаружения целей, определения их координат
и параметров движения. Принципиально такая система обладает наибольшими
функциональными возможностями, но ее осуществление связано с необходимостью
иметь широкополосные линии связи позиций с ПОИ и усложнением его аппаратуры.
При объединении траекторий на ПОИ
поступают сигналы после вторичной обработки на позициях МПРЛС, т.е. после
отбраковки ложных отметок целей. Это упрощает передачу информации на ПОИ и ее
обработку, но ведет к усложнению аппаратуры на позициях системы.
Большой прогресс в последние годы в
создании широкополосных линий связи и устройств обработки сигналов позволяет
все шире использовать МПРЛС с когерентным объединением и обработкой сигналов в
ПОИ, что позволяет в максимальной степени использовать преимущества МПРЛС.
Перспективным направлением развития
мобильных или передислоцируемых МПРЛС и повышения качества извлекаемой РЛИ
является создание радиолокационных сетей с обменом данными между входящими в
сеть РЛС. Образующие сеть локаторы могут иметь различную дальность действия,
различные сигналы и алгоритмы их обработки, различные разрешающие способности
и темп обзора пространства. Предполагается, что в этом случае ПОИ имеется у
каждой РЛС. Для того чтобы группа РЛС могла образовать сеть, необходимо, чтобы
каждый локатор был укомплектован аппаратурой координатно-временной привязки и
аппаратурой связи для обмена информацией сразу с несколькими РЛС, находящимися
в зоне надежной связи. Протокол обмена данными предполагает передачу информации
о параметрах и технических характеристиках РЛС (рабочей частоте, разрешении по
дальности, скорости и угловым координатам, периоде повторения, скорости
вращения антенны и т.п.), собственных координатах и векторе скорости РЛС (при
движущемся носителе) с указанием погрешностей их измерения, а также координатах
и скорости перемещения обнаруженных целей с указанием погрешностей их
измерения и отношений сигнал/шум. Очевидно, что при таком протоколе обмена
речь идет о пространственно-некогерентных МПРЛС с автономными ПОИ, в которых
осуществляется совместная вторичная обработка сигналов. Для реализации такой
обработки используют специальные асинхронные многовходовые траекторные фильтры
с адаптацией к качеству (погрешности измерения) и надежности (отношение
сигнал/шум) поступающей информации.
Число позиций, с которыми
установлен обмен информацией, Для каждой РЛС будет различным и будет
определяться геометрией сети и возможностями каналов связи (рис. 1.9). По
сути, каждая позиция П, в радиолокационной сети представляет собой
интегрированный радиотехнический комплекс, включающий в себя непосредственно
РЛС с высокопроизводительной системой совместной обработки информации (ССОИ),
высокоточную навигационную систему (ВНС) координатно-временной привязки и многоканальную
широкополосную систему дуплексной связи (МШСС) (рис. 1.10).
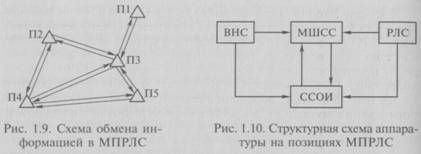 Наибольший выигрыш от объединения в сеть получается при
совместной обработке данных разнотипных РЛС, имеющих различные несущие
частоты, поляризации, высоты установки антенн, типы зондирующих сигналов. В
этом случае в каждой РЛС извлекается взаимно менее зависимая информация и их
объединение наиболее эффективно.
Наибольший выигрыш от объединения в сеть получается при
совместной обработке данных разнотипных РЛС, имеющих различные несущие
частоты, поляризации, высоты установки антенн, типы зондирующих сигналов. В
этом случае в каждой РЛС извлекается взаимно менее зависимая информация и их
объединение наиболее эффективно.
1.6. Краткая историческая справка
о создании и развитии радиолокации и
радионавигации
Явление отражения электромагнитных
волн дециметрового диапазона от металлических объектов было замечено Генрихом
Герцем в его опытах 1885—1886 гг. Однако на возможность использования
отраженных волн для обнаружения и определения положения отражающих объектов
указал другой немецкий исследователь — Халсмайер, который в 1904 г. получил патент на устройство обнаружения кораблей с целью предотвращения столкновений. Но
тогда это изобретение не вызвало большого интереса. И только в 1920-х гг.
возможность использования явления отражения и изменения параметров радиоволн
при взаимодействии с объектами была показана в опытах Маркони (Великобритания),
Тейлора и Янга (США). В 1925 г. отражение радиоволн было использовано в США
для измерения времени задержки импульсного сигнала.
В 1920—1930 гг. начались
целенаправленные исследования по применению радиоволн для обнаружения и
определения координат самолетов и кораблей, т.е. созданию устройств, которые
позже были названы радиолокационными станциями в СССР и радаром (radar) в США и
Великобритании.
Разработка РЛС перед Второй мировой
войной интенсивно велась в ряде стран независимо и в закрытом порядке. К 1941 г. были разработаны и получили практическое применение РЛС в Великобритании, Германии, СССР и
США.
К началу Второй мировой войны в
сентябре 1939 г. в Великобритании была развернута система обнаружения
самолетов в виде цепи РЛС (Chain Ноте radar), работающих на
частоте 30 МГц. Система действовала до конца войны и сыграла существенную роль
в противовоздушной обороне Великобритании. В 1939 г. в Великобритании была разработана РЛС обнаружения воздушных целей на частоте 200 МГц,
обеспечивающая более высокую точность определения координат, а в 1940 г. был разработан многорезонаторный магнетрон, позволяющий генерировать мощные колебания в
сантиметровом диапазоне радиоволн. Освоение сантиметрового диапазона открывало
возможность радикального улучшения точности и разрешающей способности РЛС.
Появление магнетрона и объединение усилий ученых и инженеров Великобритании и
США под крышей созданной осенью 1940 г. при Массачусетском технологическом
институте лаборатории излучения позволили в короткие сроки разработать РЛС
сантиметрового диапазона различного назначения.
Германия интенсивно готовилась к
войне и к концу 1940 г. имела три разработанных типа РЛС:
РЛС обнаружения самолетов Freya, использующую частоту
125 МГц;
РЛС управления зенитным огнем Wurzburg на частоте 565 МГц, работающую совместно со станцией
обнаружения Freya;
корабельную РЛС Seetact для управления огнем корабельной артиллерии на частоте 500
МГц.
Таким образом, к началу войны с
СССР Германия имела достаточно совершенные по тому времени РЛС.
Россия внесла весомый вклад в
создание и развитие радиолокации. Изобретение радио А.С.Поповым и первые опыты
по радиосвязи привели его к мысли о возможности использования радиоволн для
обнаружения и определения направления на объекты, что отражено в его отчете об
опытах по радиосвязи на Балтийском море в 1897 г. К сожалению, А.С. Попов не запатентовал своих изобретений и открытий.
Целенаправленное развитие
исследований в СССР по применению радиоволн для обнаружения самолетов
относится к началу 1930-х гг. Первые опыты успешного использования дециметровых
радиоволн для обнаружения самолетов были проведены в 1933 г. под руководством Ю. К. Коровина. С 1935 г. велась разработка импульсной РЛС под руководством
Д.А. Рожанского и Ю. Б. Кобзарева, и к началу Великой отечественной войны такая
станция была создана. В это же время на вооружение войск ПВО были приняты
разработанные под руководством Д.С. Стогова бистатические РЛС типа РУС-1 с
непрерывным излучением на частоте 75 МГц. В 1941 г. в Советской Армии появились первые РЛС импульсного типа РУС-2 и «Пегматит», также работающие
на частоте 75 МГц с импульсной мощностью Ри = 120 кВт. Несмотря на труднейшие
условия военного времени разработка и совершенствование PJIC продолжались в СССР все годы жесточайшей войны и в
послевоенные годы.
В США серьезные усилия по
разработке импульсных однопозиционных РЛС были предприняты под руководством
Тейлора и Янга. К моменту нападения Японии на морскую базу США Пирл Харбор в
декабре 1941 г. 79 кораблей США были оснащены РЛС, работавшими на частоте 200
МГц. В армии США в это время использовались значительное число станций
метрового диапазона типа SCR-268 и SCR-270.
Как отмечалось ранее, огромное
значение для развития радиолокации имела организация лаборатории излучения при
Массачусетском технологическом институте, в которой работали выдающиеся ученые
и инженеры США и Великобритании. Уже в 1943 г. там были разработаны РЛС различного назначения. В этих станциях впервые появились многие схемы и технические
решения. Так, в станции SCR-584, работавшей в десятисантиметровом
диапазоне радиоволн, впервые было осуществлено автоматическое слежение за
целью, что позволило существенно повысить точность определения координат, а
использование в бомбовом прицеле AN/APQ-13 радиоволн
трехсантиметрового диапазона позволило повысить разрешающую способность и
получить на экране ЭЛТ достаточно четкое изображение местности под самолетом.
В 1950— 1960-е гг. стремительное
развитие радиолокации и радионавигации во многом было обусловлено
противостоянием военных блоков, возглавляемых США и СССР. Огромные средства,
выделяемые на создание военной техники, подготовку специалистов в области
радиоэлектроники, соответствующую ориентацию научных исследований,
способствовали интенсивному развитию радиолокации и радионавигации. Это
инициировало разработку эффективных методов формирования и обработки сигналов
на основе статистической теории, позволившей определить пути приближения
характеристик РЛС к потенциально возможным по мере совершенствования элементной
базы радиоэлектроники.
За пять послевоенных десятилетий
радиолокационные методы получили широчайшее применение благодаря радикальному
улучшению основных характеристик РЛС. Эти характеристики позволили решить ряд
теоретических и технических проблем:
разработку мощных электронных
устройств для генерирования высокостабильных когерентных колебаний, таких как
клистроны, лампы бегущей волны, гироклистроны, мощные транзисторы;
создание допплеровских РЛС,
позволивших в полной мере использовать преимущества сложных сигналов,
эффективно решать задачи выделения движущихся целей и распознавание целей;
появление моноимпульсного метода,
позволившего резко улучшить точность измерения угловых координат;
использование сжатия импульсов и синтезирование
апертуры для радикального улучшения разрешающей способности РЛС.
Параллельно с развитием радиолокации
создавались радионавигационные системы, в разработке и совершенствовании которых
выдающуюся роль сыграли исследования ученых России и Советского Союза.
Идеи А.С.Попова послужили основой
для разработки русскими инженерами в 1910
—1912 гг. первых радиопеленгаторов.
Стремительное развитие авиации
потребовало создания средств воздушной навигации. В 1932—1933 гг. были
разработаны первый самолетный радиопеленгатор АРП-1 и самолетный радиополукомпас
«Чайка». Однако использование только угломерных устройств не обеспечивало
достаточной точности местоопределения, и внимание исследователей было обращено
на разработку навигационных систем, основанных на измерении времени задержки
радиосигналов фазовым и импульсным методами. В 1930—1934 гг. Л.И.Мандельштамом,
Н.Д. Папалекси и Е.Я.Щеголевым были разработаны фазовые методы
местоопределения, которые были применены в ряде систем радионавигации, в том
числе в используемых многие годы системах морской радионавигации: английской
«Декка» и американской «Омега».
В 1938 г. инженером Э. М. Рубчинским была выдвинута идея импульсной
разностно-дальномерной системы,
реализованной в 1942 г. в американской радионавигационной системе Лоран. А.
Система работала на волне 150 м и обеспечивала дальность место определения самолетов
и кораблей до 1 500 км. В 1950-е гг. в США была создана импульсно-фазовая
разностно-дальномерная РНС «Лоран-С». Использование длинных волн (Я. = 3 000 м) позволило увеличить дальность действия до 2 500 км и существенно повысить точность
местоопределения за счет измерения времени задержки по фазе несущих колебаний
принимаемых сигналов.
Метод импульсно-фазовых измерений
использован и в американской сверхдлинноволновой
(к ~ 104 м) разностно-дальномерной РНС «Омега». Восемь наземных станций такой системы
обеспечивают глобальное местоопределение кораблей и подводных лодок.
Сверхдлинные волны обладают двумя следующими свойствами:
·
огибание поверхности
Земли благодаря «волноводному» распространению радиоволн этого диапазона;
·
возможность приема
сигналов на глубине нескольких метров под поверхностью моря, что позволяет
подводным лодкам определять свое местоположение без всплытия.
В силу имеющихся достоинств
сверхдлинноволновые РНС остаются в числе действующих несмотря на появление
спутниковых РНС (СРНС), обеспечивающих глобальное высокоточное местоопределение
объектов на поверхности Земли и в околоземном пространстве.
В СССР параллельно с США были
разработаны РНС «Меридиан», «Чайка» и «Маршрут» с характеристиками, близкими к
аналогичным системам «Лоран-А», «Лоран-С» и «Омега», но с несколько
отличающимися параметрами.
Запуск в СССР 4 октября 1957 г. первого искусственного спутника Земли (ИСЗ) открыл возможность реализации идей создания
спутниковых РНС. В этих системах в качестве радионавигационных точек,
относительно которых осуществляется измерение координат объектов, используются
ИСЗ, движущиеся по орбитам с известными параметрами. Уже к концу 1960-х гг.
появились спутниковые РНС первого поколения (CPHC-I); «Транзит» в США и
«Цикада» в СССР, с использованием шести низкоорбитных ИСЗ и местоопределение
путем дифференцирования или интегрирования допплеровского сдвига частоты
принимаемых сигналов ИСЗ.
Однако СРНС-1 имели существенные
недостатки, заключающиеся в большой длительности сеансов местоопределения и,
главное, больших интервалах между ними, что не позволяло получать необходимую
точность и непрерывность местоопределения во всех точках земной поверхности.
В 1970-е гг. в СССР и США начались
исследования технических решений, обеспечивающих создание СРНС второго поколения
(СРНС-2) на основе использования сети из 24 ИСЗ, имеющих средневысотные орбиты
 км и период обращения около 12 ч. Такая система
обеспечивает глобальное, непрерывное и высокоточное местоопределение трех
координат и вектора скорости объектов, находящихся в околоземном пространстве.
км и период обращения около 12 ч. Такая система
обеспечивает глобальное, непрерывное и высокоточное местоопределение трех
координат и вектора скорости объектов, находящихся в околоземном пространстве.
К концу 1980-х гг. разработка
СРНС-2 была в основном завершена и в СССР и США начали работать СРНС ГЛОНАСС
(Глобальная навигационная спутниковая система) и GPS (Global Positioning System), часто называемая
также Navstar (Navigational Satellite of Time and Ranging). Основные принципы
построения систем одинаковы и отличаются орбитами ИСЗ, параметрами
радиосигналов и схемами их приема и обработки. В 1988 г. были опубликованы основные характеристики обеих систем и объявлено о предоставлении систем
ГЛОНАСС и GPS для международного использования.
Разработаны и серийно выпускаются
приемоиндикаторы систем СРНС-2 различных классов, в том числе универсальные,
рассчитанные на работу по сигналам обеих систем, что обеспечивает высокоточное
и надежное местоопределение самых различных потребителей.
Реализация принципов
дифференциального местоопределения позволяет довести точность определения
координат неподвижных объектов до десятых долей метра, а движущихся — до единиц
метров.
К 1993 г. GPS была развернута полностью, чего, к сожалению, нельзя сказать
о системе ГЛОНАСС, которая до сих пор работает с неполным составом ИСЗ. Однако
использование универсальных приемоиндикаторов позволяет, работая по сигналам
обеих систем, обеспечить глобальное местоопределение с высокой точностью и
надежностью.
Совершенствование СРНС продолжается
непрерывно. Так, в ряде стран Европы ведутся исследования по созданию новой более
экономичной СРНС, которая при выборе более рациональных типов сигналов дает
возможность при меньших затратах обеспечить точность и надежность
местоопределения не хуже более сложных действующих СРНС.
Есть основания полагать, что
достижения последних лет в создании компактных высокостабильных водородных и
цезиевых эталонных генераторов, успехи схемотехники и системотехники позволят
снизить стоимость развертывания и содержания космических аппаратов СРНС и
аппаратуры потребителей, число которых непрерывно увеличивается.
Контрольные вопросы
1.В чем заключается различие
активного и полуактивного методов радиолокации?
2.Что такое радиолокационный сигнал
и какую информацию о цели он содержит?
3.В чем заключаются достоинства РЛС
с активным ответом?
4.Укажите достоинства и недостатки
угломерного, дальномерного и
разностно-дальномерного методов
местоопределения.
5.Какова форма линий положения
дальномерных и разностно-дальномерных РНС?
6.Укажите основное преимущество
комбинированного угломерно- дальномерного метода местоопределения.
7.По каким признакам
классифицируются радиолокационные и радионавигационные системы?
8.Какие характеристики РЛС
относятся к их основным тактическим характеристикам?
9.Назовите параметры РЛС,
относящиеся к основным техническим характеристикам.
10.. В чем заключаются преимущества
и недостатки РНС сверхдлинноволнового диапазона радиоволн?
11.Каким образом формируется радиально-круговая развертка
ИКО?
12. Из каких соображений выбирается
длительность развертки дальности ИКО?
13.Почему в ИКО применяются ЭЛТ с
большим временем послесвечения экрана?
14.Определите мертвую зону (Dmin) РЛС, имеющей длительность зондирующего импульса  и время восстановления чувствительности приемного тракта
и время восстановления чувствительности приемного тракта  .
.
15.Каковы значения допплеровского
сдвига частоты сигнала РЛС трехсантиметрового диапазона, отраженного от самолета,
приближающегося к РЛС со скоростью 720 км/ч?
16.Почему суммарно-дальномерный
метод местоопределения не находит такого широкого применения в радионавигации,
как разностно- дальномерный?
17.Каковы преимущества
корреляционно-экстремальных методов навигации по сравнению с позиционным?
18.В чем заключаются преимущества
многопозиционных РЛС?
19.Какова роль статистической
теории в развитии радиолокации и радионавигации?
ФИЗИЧЕСКИЕ ОСНОВЫ РАДИОЛОКАЦИИ
2.1. Радиолокационные цели как объекты
вторичного излучения
В основе
радиолокации лежит явление рассеяния радиоволн различными объектами,
электрические параметры (диэлектрическая и (или) магнитная проницаемость,
проводимость) которых отличаются от аналогичных параметров среды. Поверхность
объекта представляет собой границу раздела двух сред, где эти параметры
изменяются скачком. При падении облучающего поля на такой объект на его
поверхности возникают переменные электрические токи высокой частоты, которые, в
свою очередь, излучают электромагнитную энергию, создавая тем самым рассеянное
(вторичное) поле. Рассеянное поле распространяется во всех направлениях, в
том числе и обратно к PJIC. В радиолокации последнее поле принято
называть отраженным. Из физической сущности явления рассеяния очевидно, что
характер отражения зависит от многих причин, обусловленных как падающей волной,
так и самим объектом.
Явление рассеяния радиоволн было
открыто в конце XIX в., однако начало его систематического изучения относится
ко времени Второй мировой войны, когда во многих странах были развернуты
работы по радиолокации. Это связано с тем, что для проектирования РЛС,
способных решать не только задачи обнаружения и измерения координат объектов,
но и задачи их разрешения (раздельного наблюдения), автоматического сопровождения,
классификации и распознавания, необходима информация об особенностях
формирования отраженных сигналов.
В зависимости от решаемой РЛС
задачи в качестве объектов радиолокационного наблюдения могут рассматриваться
любые физические тела искусственного или естественного происхождения (например,
здания, автомобили, корабли, самолеты, космические аппараты, метеоры, айсберги
и т.д.), биологические объекты (люди, животные, птицы, насекомые и т.д.),
находящиеся в окружающем РЛС пространстве, а также отдельные элементы самого
пространства: земная и водная поверхности, лесные массивы и
сельскохозяйственные угодья, метеорологические образования, диэлектрически
неоднородности воздуха (области повышенных градиентов температуры и
влажности), ионизированные следы молниевых разрядов и т.д. В радиолокации все
эти объекты принято называть радиолокационными целями или для краткости —
просто целями.
В реальных уровнях любую PЛC окружает множество целей. Сигналы, отраженные от различных
целей, оказывают различное влияние на работу РЛС. В зависимости от решаемой PЛC задачи одна и та же цель может оказывать как положительное,
так и отрицательное влияние. Например, радиолокационные отражения от морской
поверхности могут играть полезную роль, в частности, в океанографии при
дистанционном изучении поверхностных течений, измерении параметров морского
волнения. В то же время сигналы, отраженные от морской поверхности, в корабельной
навигационной РЛС могут замаскировать полезный сигнал от знака навигационного
ограждения (вехи, буя, бакена). Такие отражения называют мешающими,
помеховыми, а сами отражающие объекты — источниками помех. В англоязычных
изданиях для названия такого виды помех используется термин clutters. При наличии источника помех для того чтобы оптимизировать
структуру PЛC и правильно определить ее параметры, необходимо понимать
природу помехов радиолокационных отражений.
Радиолокация, появившись как раздел
радиотехники в 1930-х гг. для решения исключительно военных задач обнаружения
самолетов и кораблей, (быстро развивалась, что не могло остаться без внимания
специалистов других отраслей науки и техники. Начиная с 1941 г. РЛС стали использовать метеорологи для оценки метеорологической Остановки сначала с
поверхности Земли, а затем и с самолетов. Это привело к выделению из
метеорологии самостоятельной науки
— радиолокационной метеорологии, в
которой методы Н1блюдения и представления полученных результатов
основывайся на теории рассеяния радиоволн малыми частицами (гидрометеорами
аэрозолями, диэлектрическими неодноростями воздуха и т.д.).
Дальнейшие следования позволили
установить, что РЛС эффективно обнаруживают стаи птиц и рои насекомых, поэтому
орнитологи и энтомологи стали применять радиолокацию для наблюдения за грацией
птиц, перемещением насекомых. Как результат этих исследований в 1950— 1960-х
гг. образовались новые науки: радиолокационная орнитология и радиолокационная
энтомология.
С 1940-х гг. радиолокация нашла
применение для измерения характеристик парных сияний, метеоров, Луны, с 1960-х
— солнечной короны, Венеры, Меркурия, Марса, Юпитера. Радиолокационные станции
позволили измерить расстояния до небесных объектов, утонить параметры их
орбит, определить периоды вращения и получить изображения рельефа поверхности
планет. Все эти результаты способствовали становлению еще одной науки
— радиолокационной астрономии.
С появлением в 1950— 1960-х гг.
ракетной и космической техники началось радиолокационное исследование Земли с
космических аппаратов для решения задач картографирования, обслуживания
сельского и лесного хозяйств, ледовой разведки, метеорологии и т.д.
Даже такой неполный перечень
областей применения радиолокации в других отраслях науки и техники
свидетельствует о важности определения характеристик радиолокационного рассеяния
целей.
2.2. Характеристики радиолокационного
рассеяния
Для описания явления рассеяния
радиоволн вводят характеристики радиолокационного рассеяния (ХРЛР). Эти
характеристики устанавливают связи между одноименными параметрами
(энергетическими, фазовыми, частотными, поляризационными) падающего на цель и
рассеянного ею полей*.
В общем случае ХРЛР зависят:
·
от параметров РЛС
(вида зондирующего сигнала, частоты, разрешающей способности, поляризации);
·
параметров цели (ее
геометрических размеров, формы, электрических и магнитных свойств материала);
·
параметров,
характеризующих условия наблюдения (углов падения облучающего поля — ракурса
цели, расстояния между РЛС и целью).
Многообразие указанных параметров
создало условия, при которых для адекватного описания рассеивающих свойств
целей потребовалась разработка различных видов характеристик. В настоящее время
в научной и учебной литературе можно встретить более сотни ХРЛР. Однако до сих
пор не разработаны стандарты, устанавливающие не только определения, но и единую
терминологию. Поэтому наиболее часто использующимися характеристиками
являются статические, динамические и статистические.
Статические ХРЛР описывают свойства
неподвижной относительно РЛС цели при различных ее ракурсах, т.е. в ее
собственной (как правило, сферической) системе координат. Динамические ХРЛР
описывают свойства движущейся относительно РЛС цели, причем последняя может
совершать не только перемещение по траектории, но и движение вокруг центра
масс. Неопределенность ориентации цели в пространстве привела к необходимости
введения статистического описания рассеивающих свойств, из которого вытекают
статистические ХРЛР.
Статические характеристики.
Различают статические ХРЛР для узкополосных, сложных и сверхширокополосных
сигналов. Для узкополосных сигналов характерно малое отношение ширины спектра
зондирующего сигнала  к его несущей частоте f0:
к его несущей частоте f0:
 Формула (2.1) определяет показатель широкополосности. У
сверхширокополосных (СШП) сигналов отсутствует понятие несущей частоты, и
этот же показатель вводят несколько иначе: как отношение ширины спектра
зондирующего сигнала
Формула (2.1) определяет показатель широкополосности. У
сверхширокополосных (СШП) сигналов отсутствует понятие несущей частоты, и
этот же показатель вводят несколько иначе: как отношение ширины спектра
зондирующего сигнала  его средней частоте:
его средней частоте:
 где fв и fн — верхняя и нижняя частоты сигнала
соответственно.
где fв и fн — верхняя и нижняя частоты сигнала
соответственно.
Для СШП сигналов значение
показателя широкополосности теоретически не превосходит 2, а практически
 К сложным относятся сигналы, у которых база В (произведение
ширины спектра
К сложным относятся сигналы, у которых база В (произведение
ширины спектра  на длительность
на длительность  ) существенно превосходит
) существенно превосходит  . Подробнее свойства сложных сигналов рассмотрены в гл. 4.
По показателю широкополосности сложные сигналы могут относиться как к
узкополосным (если для них выполняется условие (2.1)), так и к
сверхширокополосным (если их параметры удовлетворяют равенству (2.2)).
. Подробнее свойства сложных сигналов рассмотрены в гл. 4.
По показателю широкополосности сложные сигналы могут относиться как к
узкополосным (если для них выполняется условие (2.1)), так и к
сверхширокополосным (если их параметры удовлетворяют равенству (2.2)).
При облучении цели узкополосными
сигналами для описания ее свойств применяются следующие ХРЛР: комплексный коэффициент
рассеяния (ККР), эффективная площадь рассеяния (ЭПР), диаграммы рассеяния,
матрицы рассеяния.
Исторически первой и по настоящее
время широко используемой на практике ХРЛР является ЭПР.
Очень часто для данной
характеристики используются и другие термины: радиолокационное поперечное
сечение (англ. radar cross section), эффективная
поверхность. Под ЭПР понимают площадь поперечного сечения такого
гипотетического идеального изотропного (рассеивающего энергию во всех направлениях
равномерно) отражателя (например, шара), который будучи помещен на место цели
создает на входе приемной антенны РЛС такую же плотность потока мощности, что
и сама цель. Обычно при определении ЭПР на входе приемника РЛС учитывают волну
той же поляризации, что и падающая, хотя при рассеянии могут образовываться
волны различной поляризации.
Учитывая приведенное определение
ЭПР, мощность, рассеянную целью, можно представить в виде

где Пп — плотность потока мощности падающего на
цель поля; о — эффективная площадь рассеяния.
С учетом изотропности отражателя
плотность потока мощности отраженной (рассеянной) волны в месте нахождения
антенны РЛС на расстоянии D от цели
 . Отношение
. Отношение  — характеристика мало
информативная, так как зависит от расстояния D. Для устранения
зависимости от расстояния ЭПР определяют следующим образом:
— характеристика мало
информативная, так как зависит от расстояния D. Для устранения
зависимости от расстояния ЭПР определяют следующим образом:
 где
где  — напряженности падающего и рассеянного полей
соответственно.
— напряженности падающего и рассеянного полей
соответственно.
Определение ЭПР по формуле (2.4)
справедливо только для монохроматического сигнала. Но на практике формулу (2.4)
используют и для импульсных сигналов, если полоса частот А/, занимаемая
спектром падающего поля, удовлетворяет условию
 где с — скорость распространения
электромагнитных волн; L — линейный размер цели в направлении распространения
падающей волны.
где с — скорость распространения
электромагнитных волн; L — линейный размер цели в направлении распространения
падающей волны.
При количественной оценке ЭПР применяются
абсолютные и относительные единицы. Абсолютной единицей ЭПР является единица
площади — метр квадратный, м2, относительной — децибел, дБ. ЭПР
нормируют либо к 1 м2:
 Часто индексы 1 и 2 при о опускают.
Часто индексы 1 и 2 при о опускают.
Удобство относительных единиц
связано с тем, что ЭПР изменяется в широком динамическом диапазоне. Например,
вместо  соответственно.
соответственно.
Для характеристики специфических
отражателей, таких как ленты и стержни, подстилающая поверхность, объемные цели
(облака), вводят понятие удельной ЭПР. Цели, протяженность которых много больше
поперечного размера, характеризуются удельной линейной ЭПР, подстилающие
поверхности — удельной поверхностной ЭПР, объемные цели — удельной объемной
ЭПР. Удельные ЭПР определяются соотношениями:
 где L, S, V — длина, площадь поверхности и объем цели
соответственно.
где L, S, V — длина, площадь поверхности и объем цели
соответственно.
Эффективная площадь рассеяния,
определяемая выражением (2.4), является исключительно энергетической
характеристикой, не зависит от расстояния D до цели и поэтому не учитывает фазовые соотношения в
падающей и рассеянной волнах. Для одновременного описания изменения фазы и
амплитуды поля при его рассеянии используют другую характеристику
— комплексный коэффициент
рассеяния
 Предел D → в определениях ЭПР по формуле
(2.4) и ККР по формуле (2.5) обозначает не соответствующую математическую
операцию, а условие нахождения цели в дальней зоне излучения РЛС, позволяющее
использовать для облучающего поля модель плоской волны. Для рассеянного поля
необходимо использовать модель сферической волны.
Предел D → в определениях ЭПР по формуле
(2.4) и ККР по формуле (2.5) обозначает не соответствующую математическую
операцию, а условие нахождения цели в дальней зоне излучения РЛС, позволяющее
использовать для облучающего поля модель плоской волны. Для рассеянного поля
необходимо использовать модель сферической волны.
Для удобства записи фазовых
соотношений рассеянную волну формально представляют как результат отражения от
точки, называемой фазовым центром рассеяния (ФЦР). ФЦР — это некоторая
условная точка О' (рис. 2.1) внутри контура объекта или вблизи него, которую
можно рассматривать как эквивалентный источник, создающий в точке приема В при
заданной напряженности падающего поля  такую же по амплитуде и фазе напряженность
рассеянного поля
такую же по амплитуде и фазе напряженность
рассеянного поля  , что и сама цель.
, что и сама цель.
Комплексный коэффициент рассеяния
можно представить в виде

Где  — модуль и аргумент (фазовый угол) ККР
соответственно.
— модуль и аргумент (фазовый угол) ККР
соответственно.
Модуль коэффициента рассеяния не
зависит от расстояния до объекта, в то время как аргумент зависит. Если начало
системы
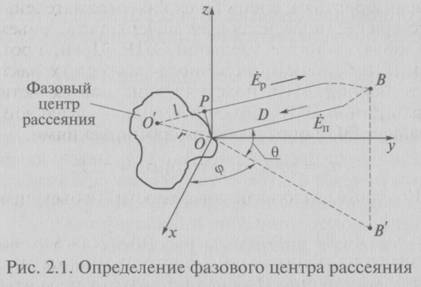
координат расположено в точке О
(см. рис. 2.1) на поверхности цели, а ФЦР — в точке О', фазовый угол можно
представить в виде суммы углов 

— волновое число,  . Первый угол зависит от расстояния D от начала О системы координат до точки приема В, второй — от
расстояния l, где l — проекция радиуса-вектора г, определяющего положение ФЦР
в системе координат Oxyz, на направление распространения радиоволн. Множитель 2 в
выражении для
. Первый угол зависит от расстояния D от начала О системы координат до точки приема В, второй — от
расстояния l, где l — проекция радиуса-вектора г, определяющего положение ФЦР
в системе координат Oxyz, на направление распространения радиоволн. Множитель 2 в
выражении для  учитывает распространение падающей и рассеянной волн на
расстоянии l. С целью устранения зависимости arg A от расстояния D до цели, а следовательно, и фазы ККР от D в определение (2.5) вводят дополнительный множитель exp(-jkD). Тогда
учитывает распространение падающей и рассеянной волн на
расстоянии l. С целью устранения зависимости arg A от расстояния D до цели, а следовательно, и фазы ККР от D в определение (2.5) вводят дополнительный множитель exp(-jkD). Тогда

Эффективная площадь рассеяния,
определяемая по формуле (2.4), и комплексный коэффициент рассеяния,
определяемый по формуле (2.5) или (2.6), связаны простым соотношением

Понятия ККР и ЭПР справедливы не
только для случая однопозиционной (моностатической) радиолокации, когда
передающая и приемная антенны РЛС совмещены, но и для случая многопозиционной
радиолокации, когда приемников несколько и они разнесены в пространстве относительно
передатчика.
Характеристики  а зависят от
ориентации цели по
а зависят от
ориентации цели по
отношению к направлениям облучения
и приема. Данные зависимости обычно представляют в виде диаграмм рассеяния,
классификация которых представлена на рис. 2.2. По виду ХРЛР диаграммы
рассеяния подразделяются на амплитудные (отражают зависимость  фазовые вида arg
фазовые вида arg 
Диафаммы рассеяния характеризуют
зависимости отражающих свойств цели от угла падения волны и угла между
направлениями облучения и приема. С этой точки зрения различают диаграммы
следующих видов: моностатические, бистатические, а также пространственные
моностатические и бистатические.
Моностатические диаграммы рассеяния
— это зависимости любой из ХРЛР от одного из углов:  или
или  — при постоянстве другого. Бистатические диаграммы рассеяния
— это зависимости любой из ХРЛР от одного из углов:
— при постоянстве другого. Бистатические диаграммы рассеяния
— это зависимости любой из ХРЛР от одного из углов:  — или от угла
— или от угла  (рис. 2.3) при постоянстве всех
остальных углов. Пространственные моностатические диаграммы рассеяния — это зависимости
ХРЛР от двух углов:
(рис. 2.3) при постоянстве всех
остальных углов. Пространственные моностатические диаграммы рассеяния — это зависимости
ХРЛР от двух углов:  — одновременно. Пространственные бистатические диаграммы
рассеяния — это зависимости ХРЛР от двух углов:
— одновременно. Пространственные бистатические диаграммы
рассеяния — это зависимости ХРЛР от двух углов: 
— одновременно при постоянстве
остальных углов.
Анализируя диаграммы рассеяния,
можно отметить важную особенность ХРЛР — их многомерность. Однако многомерность
ХРЛР обусловлена не только зависимостью электродинамических свойств целей от
углов падения и рассеяния волн, но и векторным


характером электромагнитного поля.
Для учета последнего вводят матрицу рассеяния.
Матрица рассеяния характеризует
распределение рассеянной энергии по видам поляризации при фиксированной
поляризации облучающего поля, а также учитывает неравномерность распределения
рассеянного поля в пространстве. При неизменной поляризации облучающего поля
рассеянное будет иметь составляющие разной поляризации.
Облучающее поле (например, в
плоскости, перпендикулярной направлению на цель и касательной к контурам цели)
можно представить в виде суммы двух ортогональных составляющих:

где х и у — орты линейного
поляризационного базиса.
Рассеянное поле в плоскости
апертуры антенны приемника можно представить в том же поляризационном базисе:
Процессы распространения и
рассеяния электромагнитных волн линейны, поэтому каждая из
ортогонально-поляризованных компонент рассеянного поля в общем случае зависит
от параллельной и перекрестной компонент падающего поля: 
Эти выражения удобно представить в
матричной форме: 
Матрица размером 2x2 в правой части
формулы (2.9) называется матрицей рассеяния, а также поляризационной матрицей.
Матрица рассеяния представляет собой набор ККР из формулы (2.6) для различных
сочетаний поляризаций падающего и рассеянного полей. Матрица рассеяния является
более полной характеристикой цели, так как содержит информацию об амплитуде,
фазе и поляризации рассеянной волны при заданном облучающем поле. В качестве
ортогональных волн обычно рассматривают волны линейной (вертикальной и
горизонтальной) поляризации.
Если необходимо характеризовать
только энергии рассеянных полей, то вводят матрицу ЭПР 
элементы которой не содержат
информации о фазе рассеянного поля. Элементы матрицы ЭПР из формулы (2.10)
связаны с элементами матрицы рассеяния в формуле (2.9) соотношением (2.7).
Как уже отмечалось, понятия ККР и
ЭПР строго определены только для монохроматического сигнала. Для сложных и СШП
сигналов вводят обобщенные статические ХРЛР, которые в монохроматическом
случае совпадают с традиционными. В качестве обобщенных используют ХРЛР как во
временной области (например, импульсные характеристики), так и в частотной
(комплексные частотные характеристики). Представление цели импульсными или
частотными характеристиками означает, что она рассматривается как некоторая
линейная модель (устройство), к которой полностью применимы соответствующие
теоремы теории линейных цепей. Перед тем как использовать методы анализа линейных
систем при решении задач рассеяния, определим в качестве входных и выходных
величин напряженности электрического поля в двух точках пространства на
заданных направлениях. Используем систему координат (см. рис. 2.1), начало О
которой расположено на поверхности цели, а ее ФЦР — в точке О Под входным
воздействием на эквивалентную цели линейную цепь понимают падающую плоскую
волну в выбранном начале координат О. При линейной поляризации падающее поле  можно описать скалярной функцией, зависящей от угловых координат
можно описать скалярной функцией, зависящей от угловых координат
 и времени t. Тогда частотный
спектр падающего излучения может быть записан с помощью преобразования Фурье:
и времени t. Тогда частотный
спектр падающего излучения может быть записан с помощью преобразования Фурье:

а само электромагнитное поле как
функция времени — с помощью обратного преобразования Фурье:

Выражения (2.11) и (2.12)
представляют пару преобразований Фурье, которую символически можно записать в
виде

Таким образом, входное воздействие
на линейную модель, эквивалентную цели, можно рассматривать во временной области
как функцию времени  в частотной области
в частотной области
— как частотный спектр  которые связаны между собой соотношением (2.13).
которые связаны между собой соотношением (2.13).
Под выходным сигналом линейной
модели, эквивалентной цели, имеют в виду напряженность рассеянного поля в точке
 расположения приемной антенны PЛC. Как и входное воздействие, выходной сигнал можно
рассматривать либо во временной области, либо в частотной. Символически
выходной сигнал (рассеянное поле) записывают в виде
расположения приемной антенны PЛC. Как и входное воздействие, выходной сигнал можно
рассматривать либо во временной области, либо в частотной. Символически
выходной сигнал (рассеянное поле) записывают в виде
С учетом возможных поляризаций
падающего и рассеянного полей, а также при различных углах падения облучающего
поля, эквивалентная цели линейная модель должна иметь переменные параметры. При
заданном виде линейной поляризации и постоянных углах прихода падающей плоской
волны связь между  определяется соотношениями, характерными для линейной цепи
с постоянными параметрами.
определяется соотношениями, характерными для линейной цепи
с постоянными параметрами.
Если входное воздействие  на линейную цепь, эквивалентную цели, представляет собой
произвольную функцию времени, то, представив ее с помощью выражения (2.11),
можно в соответствии с выражением (2.6) получить спектр выходного сигнала:
на линейную цепь, эквивалентную цели, представляет собой
произвольную функцию времени, то, представив ее с помощью выражения (2.11),
можно в соответствии с выражением (2.6) получить спектр выходного сигнала: 
где  — частотная характеристика эквивалентной
цели линейной модели, под которой понимают зависимость от частоты ККР цели.
Применяя к выражению (2.14) обратное преобразование Фурье, определяют сигнал
на выходе эквивалентной линейной цепи как функцию времени:
— частотная характеристика эквивалентной
цели линейной модели, под которой понимают зависимость от частоты ККР цели.
Применяя к выражению (2.14) обратное преобразование Фурье, определяют сигнал
на выходе эквивалентной линейной цепи как функцию времени:

Используя теорему о сдвиге в
преобразовании Фурье, равенство (2.15) можно представить в виде

Линейное рассеяние, как и линейные
цепи, удобно рассматривать, вводя специфические функции воздействия — тестовые
сигналы. Во временной области наиболее распространено входное воздействие в
виде дельта-функции Дирака: 
Спектр такого воздействия 
Если в выражении (2.16) воздействие
представляет собой дельта-функцию, определяемую из выражения (2.17), то
интеграл в этом выражении — импульсную характеристику  линейной цепи, эквивалентной рассеивающей цели, т.е.
линейной цепи, эквивалентной рассеивающей цели, т.е. 
и сигнал на выходе цепи в
соответствии с выражением (2.16) получим в виде 
Из уравнения (2.19) очевидно, что
импульсная характеристика рассеяния — это нормированный отклик рассеивающей
цели на воздействие дельта-функции Дирака: 
Формула (2.20) учитывает тот факт,
что рассеянное поле — сферическая волна, напряженность электрического поля
которой изменяется обратно пропорционально расстоянию D.
Частотная характеристика линейной
модели, эквивалентной цели, связана с ее импульсной характеристикой
преобразованием Фурье:

Выражения (2.18) и (2.21)
составляют пару преобразований Фурье, которую символически записывают в виде 
При произвольном воздействии  сигнал на выходе эквивалентной цели линейной модели можно
определить через импульсную характеристику
сигнал на выходе эквивалентной цели линейной модели можно
определить через импульсную характеристику  с помощью интеграла Дюамеля:
с помощью интеграла Дюамеля:

На рис. 2.4 приведена структурная
схема, иллюстрирующая математическую модель, используемую для описания
рассеяния электромагнитных волн целью. Очевидно, что выходной сигнал Ёр
на произвольное воздействие Ёп может быть получен как во временной,
так и в частотной областях. В частотной области отклик на входное воздействие
пропорционален произведению спектра падающего сигнала на частотную
характеристику эквивалентной цели линейной цепи, во временной — свертке
падающего сигнала с импульсной характеристикой цепи.
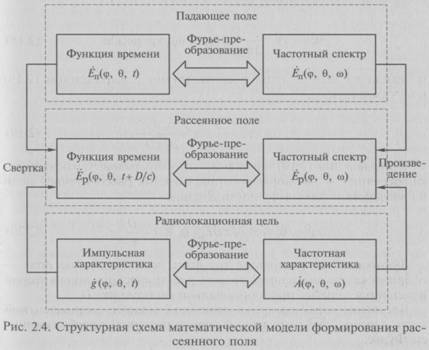
В частотной области применяют
тестовое входное воздействие в виде поля, изменяющегося во времени по
гармоническому закону. При этом линейную цепь, эквивалентную цели, характеризуют
частотной характеристикой (2.21), которую можно представить в виде 
где  — амплитудно-частотная характеристика
(АЧХ);
— амплитудно-частотная характеристика
(АЧХ);
arg  — фазово-частотная характеристика (ФЧХ).
— фазово-частотная характеристика (ФЧХ).
Фазово-частотная характеристика
связана с положением ФЦР цели (О' на рис. 2.1) соотношением arg  где
где  — функция, отражающая зависимость проекции l радиуса- вектора r от частоты.
— функция, отражающая зависимость проекции l радиуса- вектора r от частоты.
Учитывая векторный характер
электромагнитного поля, вводят матрицы:

При определении характеристик
рассеяния радиолокационные цели в зависимости от их формы обычно делят на две
группы. К первой группе относят отражатели простой формы (сфера, диск, конус,
цилиндр, пластина, уголковые конструкции), а также некоторые специальные
отражатели (линзы Люнеберга и Итона — сферические или цилиндрические
диэлектрические отражатели, диэлектрическая проницаемость материала которых
изменяется от поверхности отражателя до его центра по определенному закону) и
отражатели-антенны (обычные антенны — дипольные, рупорные, короткозамкнутые в
точке подключения фидера или волно- водного тракта, или решетки из попарно
соединенных с помощью фидерных линий или волноводов антенн — решетки Ван-
Атта).
Ко второй группе относят
подавляющее большинство реальных целей. Это цели сложной геометрической формы:
самолеты и искусственные спутники, корабли, различные сооружения и т.д.
Характеристики рассеяния целей
первой группы изучены достаточно хорошо и могут быть определены для каждого
конкретного их расположения относительно РЛС. Аналитические выражения диаграмм
ЭПР и максимальных ЭПР некоторых отражателей простой формы представлены в табл.
2.1.
Для целей сложной формы рассчитать
характеристики рассеяния в общем виде не представляется возможным. Тем не
менее для некоторых из них такие характеристики получены экспериментально.
Например, известна эмпирическая формула, определяющая АЧХ судна:

где ƒ — частота сигнала РЛС,
МГц; Ds — водоизмещение судна, тыс. т.
Формула (2.22) справедлива для
сантиметрового диапазона длин волн и для судов с водоизмещением 2 000... 17 000
т.
При изучении частотных и импульсных
характеристик рассеяния различают три основные области их определения: низкочастотную
(длинноволновую), резонансную и высокочастотную (коротковолновую).
Эти названия никакого отношения к
действительным частотам сигналов РЛС не имеют, а относятся к размерам целей,
выраженных в числе длин волн облучающего поля. Для целей простой формы на рис.
2.5 представлена обобщенная АЧХ, определяющая зависимость модуля ККР от  , где l— характерный размер
цели.
, где l— характерный размер
цели.
В низкочастотной области размеры
цели значительно меньше длины волны  следовательно, составляющие цель элементы
слишком малы для их отдельного разрешения, а фазы рассеянных ими полей мало
отличаются друг от друга. Поэтому поля, рассеянные элементами цели, описываются
функциями, мало отличающимися друг от друга и в первом приближении одинаково
влияющими на результирующее поле. По этой причине практически все тела в этой
области обладают общими свойствами: напряженности отраженных электрического и
магнитного полей почти не зависят от формы тела и пропорциональны квадрату
частоты сигнала РЛС. Тогда в соответствии с формулой
следовательно, составляющие цель элементы
слишком малы для их отдельного разрешения, а фазы рассеянных ими полей мало
отличаются друг от друга. Поэтому поля, рассеянные элементами цели, описываются
функциями, мало отличающимися друг от друга и в первом приближении одинаково
влияющими на результирующее поле. По этой причине практически все тела в этой
области обладают общими свойствами: напряженности отраженных электрического и
магнитного полей почти не зависят от формы тела и пропорциональны квадрату
частоты сигнала РЛС. Тогда в соответствии с формулой
(2.5) АЧХ  также пропорциональна квадрату частоты, а
также пропорциональна квадрату частоты, а
ЭПР в соответствии с формулой (2.4)
— четвертой степени частоты. Координаты ФЦР не зависят от частоты и совпадают
с координатами центра масс.
В резонансной области, где размеры
цели  соизмеримы с длиной волны РЛС, поля, рассеянные различными
элементами цели, связаны сложными функциональными соотношениями. При сложении
полей возникают резонансные явления.
соизмеримы с длиной волны РЛС, поля, рассеянные различными
элементами цели, связаны сложными функциональными соотношениями. При сложении
полей возникают резонансные явления.

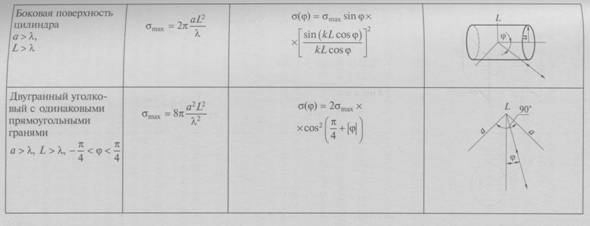

Амплитудно-частотная характеристика
носит колебательный характер.
В высокочастотной области размеры
цели много больше длины волны  пропорциональна
пропорциональна 
где величина  зависит от формы цели и лежит в пределах
зависит от формы цели и лежит в пределах  . По отношению к наиболее часто применяемым на практике PЛC сантиметрового диапазона характеристики рассеяния отражателей
простой формы сосредоточены в высокочастотной области, поэтому остановимся на
их изучении более подробно.
. По отношению к наиболее часто применяемым на практике PЛC сантиметрового диапазона характеристики рассеяния отражателей
простой формы сосредоточены в высокочастотной области, поэтому остановимся на
их изучении более подробно.
В высокочастотной области
уникальными свойствами обладает сферический отражатель, АЧХ которого
определяется выражением

где r — радиус сферы; rB — проекция радиуса-вектора, определяющего положение ФЦР,
на направление распространения отраженной волны.
Если начало системы координат (см.
рис. 2.1) расположено в ближайшей к PJIC точке на поверхности
сферы, то  если в центре сферы, то
если в центре сферы, то  . Используя соотношение (2.18), можно определить импульсную
характеристику сферического отражателя в высокочастотной области:
. Используя соотношение (2.18), можно определить импульсную
характеристику сферического отражателя в высокочастотной области:

Представляя дельтафункцию
интегралом Фурье

соотношение (2.23) запишем в виде
Таким образом, импульсная
характеристика сферического отражателя в высокочастотной области выражается
через дельта- функцию. Используя интеграл Дюамеля, определим отклик сферического
отражателя на входное воздействие 

Подставляя в формулу (2.24)
выражение импульсной характеристики из формулы (2.23) и изменяя порядок
интегрирования, получим

С учетом теоремы о сдвиге аргумента
в преобразовании Фурье соотношение (2.25) можно записать в виде

Изменяя в формуле (2.26) порядок
интегрирования и используя фильтрующее свойство дельтафункции, получим отклик
сферического отражателя в высокочастотной области на воздействие  в виде
в виде
Из выражения (2.27) следует, что
отраженный от сферы сигнал имеет ту же форму, что и входное воздействие  и отличается от последнего задержкой во времени на величину
и отличается от последнего задержкой во времени на величину
 и уменьшением амплитуды в
и уменьшением амплитуды в  раз.
раз.
В теории радиолокации введено
специальное понятие точечного отражателя. Под точечным отражателем в
высокочастотной области понимают такой гипотетический отражатель, частотная
характеристика которого не зависит от частоты, а отклик (как функция времени)
повторяет по форме входное воздействие. Если к тому же рассеивающие свойства не
зависят от ориентации в пространстве, то говорят о точечном изотропном
отражателе. Из реально существующих отражателей по своим характеристикам
рассеяния в высокочастотной области к точечному изотропному отражателю
приближается сферический отражатель, радиус которого больше длины волны, но
существенно меньше размеров элемента разрешения РЛС по дальности, углу места и
азимуту.
Следует отметить, что ЭПР как
характеристика рассеяния позволяет оценивать радиолокационную заметность цели,
а также рассчитывать дальность действия РЛС и некоторых систем связи.
Характеристики рассеяния во временной и частотной областях позволяют применять
для построения объектов с малым рассеянием в заданном направлении методы
синтеза, разработанные в теории линейных цепей.
Статические ХРЛР описывают
рассеяние неподвижной целью. Они не зависят от времени, а частоты рассеянного и
облучающего полей равны между собой.
Динамические характеристики. Для
описания ХРЛР движущихся целей используют динамические характеристики. Причем,
говоря о движении объекта, полагают, что он может совершать не только
перемещение по траектории, но и вращение вокруг центра масс. Однако в каждый
момент времени его положение и скорость относительно РЛС известны.
Динамические ХРЛР представляют
собой зависимости ККР, ЭПР и некоторых других статических характеристик от времени.
Если отношения характерных размеров
цели к длине волны облучающей РЛС велики, диаграммы рассеяния цели носят сильно
изрезанный (многолепестковый) характер. Например, в сантиметровом диапазоне
даже у сравнительно небольших целей ширина лепестков диаграммы ЭПР может
составлять доли градуса. Многолепестковость диаграмм связана с интерференцией
полей, отраженных от отдельных элементов конструкции цели, разнесенных в
пространстве на расстояния, существенно превышающие длину волны
электромагнитного поля.
Считая, что траектория цели и ее
мгновенное положение относительно РЛС известны, а также зная статические
характеристики, можно определить соответствующие динамические ХРЛР, например  и т.д. При
динамическом рассеянии зависимости ХРЛР от времени описываются сложными, но
детерминированными функциями.
и т.д. При
динамическом рассеянии зависимости ХРЛР от времени описываются сложными, но
детерминированными функциями.
Спектральный состав отраженного
сигнала может отличаться от спектрального состава падающего поля. На
спектральный состав отраженного сигнала влияют различные факторы, но основной
вклад в изменение его спектра вносит допплеровский сдвиг частоты

где vr — радиальная скорость цели относительно РЛС.
Вращение цели вокруг центра масс
может вызывать как амплитудную, так и частотную модуляции отраженного сигнала.
В результате даже при облучении монохроматической волной отраженное от
движущейся цели поле будет иметь сложную частотную структуру.
Статистические характеристики. На
практике действительное положение цели по отношению к РЛС, как правило, точно
неизвестно. Это связано со случайными возмущающими воздействиями,
оказывающими влияние на любую движущуюся цель. Сигналы, отраженные от таких
целей, являются случайными функциями времени. Следовательно, динамические ХРЛР
представляют собой реализации случайного процесса и их использование теряет
смысл. В качестве иллюстрации на рис. 2.6 приведена полученная экспериментально
в натурных условиях зависимость от времени ЭПР морской швартовной бочки,
совершающей вынужденные колебания под воздействием волн.
Когда положение цели в пространстве
относительно РЛС и ее радиальная скорость в каждый момент времени точно не
определены и изменяются случайным образом, вводят статистические ХРЛР —
вероятностные характеристики случайных процессов, описывающие изменения во
времени ККР, ЭПР, матрицы рассеяния и т.д.
Полную информацию о случайном
процессе предоставляют многомерные плотности вероятности (ПВ). ПВ используются
для описания распределения вероятностей. Когда о случайном процессе достаточно
знать меньше, чем позволяют ПВ, используют начальные или центральные моменты
распределения. Часто ограничиваются:
первым начальным моментом (средним)
случайного процесса
вторым центральным моментом
(дисперсией)


смешанным вторым начальным моментом
(корреляционной функцией) 
где W(х, t) — одномерная ПВ случайного процесса; W(xt, х2, t1, t2) — двухмерная ПВ.
Например, используют диаграммы
средней ЭПР. При введении диаграммы средней ЭПР учитывают, что производится усреднение
как во времени, так, фактически, и по угловым координатам. При усреднении во
времени амплитуда сигнала определяется путем его наблюдения на некотором
интервале. За время этого интервала положение цели в пространстве изменяется
случайным образом, следовательно, в сторону антенны РЛС в разные моменты
времени направлены разные участки диаграммы ЭПР. Таким образом происходит
усреднение по углу в секторе, в пределах которого изменяется положение цели.
Средняя ЭПР определяется соотношениями:
Выбор интервалов усреднения  и
и  зависит от типа решаемых задач. При
зависит от типа решаемых задач. При  получим среднюю ЭПР, одинаковую для всех направлений. Эту
ЭПР можно использовать для сравнения рассеяния различными целями или при замене
реальной цели точечным изотропным отражателем. Но при этом теряется часть
полезной информации о распределении рассеянной энергии по углам. При малых углах
и
получим среднюю ЭПР, одинаковую для всех направлений. Эту
ЭПР можно использовать для сравнения рассеяния различными целями или при замене
реальной цели точечным изотропным отражателем. Но при этом теряется часть
полезной информации о распределении рассеянной энергии по углам. При малых углах
и  диаграммы средней ЭПР мало отличаются от реализаций
случайного процесса. Обычно выполняют усреднение в секторе углов 7... 15°.
диаграммы средней ЭПР мало отличаются от реализаций
случайного процесса. Обычно выполняют усреднение в секторе углов 7... 15°.
На рис. 2.7 приведена диаграмма
средней ЭПР корабля, изображенная в полярной системе координат.
Наибольший интерес представляют
модель и характеристики статистического рассеяния движущейся цели и класс
случайных процессов, к которому принадлежит исследуемый процесс. От этого
зависит алгоритм обнаружения отраженного сигнала в шумах и помехах, а также
подход к анализу самого процесса. Приведем
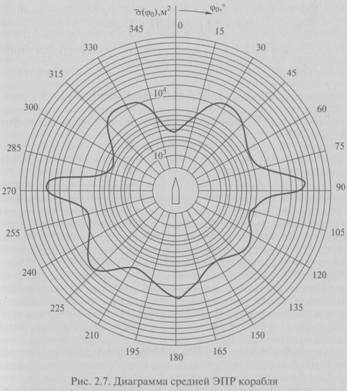
модели некоторых процессов.
Статистические характеристики рассмотрим на примере ЭПР.
1. Стационарный случайный процесс —
наиболее простая и распространенная модель, справедливая для рассеяния целями,
движущимися постоянным курсом (корабль, самолет). Обычно говорят о
стационарности в широком смысле, при которой средняя ЭПР  (черта обозначает статистическое усреднение) и дисперсия
ЭПР не зависят от времени, а функция корреляции К зависит только от сдвига
(черта обозначает статистическое усреднение) и дисперсия
ЭПР не зависят от времени, а функция корреляции К зависит только от сдвига  процесса во времени. Усреднение по множеству реализаций
можно заменить усреднением по времени одной реализации, полагая процесс
эргодическим. Для стационарного случайного процесса спектральная плотность
флуктуаций ЭПР
процесса во времени. Усреднение по множеству реализаций
можно заменить усреднением по времени одной реализации, полагая процесс
эргодическим. Для стационарного случайного процесса спектральная плотность
флуктуаций ЭПР  связана с функцией корреляции
связана с функцией корреляции  преобразованием Фурье (теорема Винера —Хинчина):
преобразованием Фурье (теорема Винера —Хинчина):
Соотношения (2.28) справедливы для
любого вида рассеяния В ряде задач используют функцию корреляции по частоте, определяемую
для центрированного случайного процесса соотношением


2. Нестационарный случайный процесс
характеризует рассеяние маневрирующих целей, а также изменяющихся во времени поверхностных
и объемных целей (расширяющегося нефтяного пятна на поверхности воды или
облака дыма, рассеивающихся в пространстве дипольных помех и т.д.). При этом
средняя ЭПР и дисперсия ЭПР зависят от времени, а функция корреляции зависит
от первого и второго моментов времени.
В отдельную группу статистических
характеристик выделяют шумы подвижной цели: амплитудный, угловой и
дальномерный*. Под амплитудным шумом цели понимают случайные изменения
напряженности отраженного электромагнитного поля, под угловым шумом
— случайные изменения угловых
координат и под дальномерным — случайные изменения дальности до цели.
Для целей в свободном пространстве
физическая природа возникновения указанных шумов одна и та же: наличие в их
архитектуре нескольких отражающих элементов, которые при расчетах
представляют, как правило, точечными отражателями. Возникновение шумов
возможно, если цель содержит, как минимум, два отражающих элемента, разнесенных
в пространстве на расстояние, существенно превышающее длину волны РЛС.
Рассмотрим причины появления шумов
на простом примере, сравнивая одиночный точечный изотропный отражатель и систему
из двух точечных изотропных разнесенных отражателей.
Движущийся в свободном пространстве
одиночный точечный изотропный отражатель не создает никаких шумов. Так как отражение
носит изотропный характер, любые изменения его углового положения в
пространстве относительно РЛС не приведут к изменению напряженности отраженного
поля. Следовательно, амплитудного шума не будет. Фазовый фронт
электромагнитной волны, рассеянной точечным отражателем, представляет собой
сферическую поверхность. Поскольку антенна РЛС определяет направление нормали к
фазовому фронту, а нормаль к поверхности сферы всегда указывает на ее центр,
то в этом случае нет изменения углового положения точечного отражателя при его
вращении вокруг центра масс и нет углового шума. Дальность до отражателя
определяется как половина произведения скорости распространения
электромагнитных волн на время запаздывания отраженного сигнала. При этом
точечным отражателем не вносится погрешность, обусловленная его запаздыванием,
и дальномерно- го шума нет. Обратим внимание, что вблизи границы раздела двух
сред, характерной для морской радиолокации, даже неподвижный одиночный
точечный отражатель создает все указанные шумы, что объясняется многолучевыми
механизмами распространения радиоволн.
При наличии двух отражателей в
точку наблюдения по разным направлениям приходят две сферические волны. В
результате их интерференции получается суммарная волна, амплитуда которой
зависит от соотношений амплитуд и фаз первой и второй волн. Если эти
соотношения будут изменяться случайным образом, например при движении цели, то
возникнут флуктуации амплитуды суммарной волны, т.е. амплитудный шум. Фазовый
фронт суммарной волны уже не будет сферическим, и нормаль к нему укажет
направление не на действительный центр цели, а на ФЦР. Положение ФЦР также
зависит от соотношений амплитуд и фаз волн, рассеянных каждым отдельным
отражателем. При случайном изменении указанных соотношений ФЦР будет изменять
свои координаты (блуждать), вызывая как флуктуации углового положения цели
(угловой шум), так и изменение ее дальности (дальномерный шум). Это явление
ограничивает точность измерения направления на цель и расстояния до нее.
Следует подчеркнуть, что данные погрешности измерений обусловлены исключительно
самой целью. РЛС как инструмент для проведения измерений может внести
дополнительные погрешности.
2.3. Статистические модели отраженных
полей и ЭПР радиолокационных целей
К настоящему времени предложено
несколько десятков ПВ ЭПР, базирующихся либо на определенных физических
представлениях о процессе отражения радиоволн целями, либо полученных непосредственно
на основе экспериментальных данных. Прежде чем остановиться на описании
некоторых ПВ ЭПР, часто используемых в практических расчетах, кратко
рассмотрим ПВ напряженности (амплитуды) рассеянных целями полей.
Одна из первых физических моделей
рассеяния построена на основе теории геометрической оптики и предполагает
наличие в архитектуре цели большого числа отдельных взаимонезависимых
отражателей с примерно одинаковой ЭПР. В рамках этой модели ПВ напряженности
электрического поля подчиняется закону Рэлея: 
где  — средний квадрат напряженности
электрического поля.
— средний квадрат напряженности
электрического поля.
Если в составе цели имеется
доминирующий рассеивающий элемент, напряженность поля Е1 которого
существенно превышает напряженности полей от остальных отражателей, П В
амплитуды сигнала определяется обобщенным законом Рэлея (законом Райса): 
где  — модифицированная функция Бесселя
нулевого порядка.
— модифицированная функция Бесселя
нулевого порядка.
Ограничимся рассмотрением еще двух
так называемых нерэлеевских ПВ напряженности отраженного поля, описываемых распределением
Накагами (w-распределение) и логарифмически нормальным распределением.
Для распределения Накагами ПВ имеет
следующий вид: 
Для логарифмически нормального
распределения ПВ определяется формулой

где  — среднеквадратичное отклонение логарифма
мощности отраженного сигнала;
— среднеквадратичное отклонение логарифма
мощности отраженного сигнала;
 — медиана распределения мощности.
— медиана распределения мощности.
Из определения (2.4) следует, что
ЭПР пропорциональна квадрату напряженности электрического поля. Применяя
правило преобразования вероятностных распределений к ПВ, по формуле (2.29)
получим ПВ ЭПР

где  — средняя ЭПР объекта.
— средняя ЭПР объекта.
Распределение (2.33) называется
экспоненциальным распределением ЭПР. Таким образом, флуктуации ЭПР цели в
соответствии с экспоненциальным распределением (2.33) приводят к рэлеевскому
распределению (см. формулу (2.29)) амплитуды отраженного сигнала. Так как
мощность отраженного сигнала пропорциональна ЭПР объекта, ПВ мощности также
будет описываться экспоненциальным законом:
где  — средняя мощность отраженного сигнала.
— средняя мощность отраженного сигнала.
Аналогично можно показать, что
изменения амплитуды сигнала, подчиняющиеся обобщенному закону Рэлея (см.
формулу (2.30)), обусловлены флуктуациями ЭПР с распределением

где  — ЭПР доминирующего отражателя в
архитектуре цели.
— ЭПР доминирующего отражателя в
архитектуре цели.
Плотность вероятности, выраженная
формулой (2.31), — результат флуктуаций ЭПР с распределением
плотность вероятности, выраженная
формулой (2.32), — результат флуктуаций ЭПР с распределением

где  — медиана распределения ЭПР.
— медиана распределения ЭПР.
Выражения (2.34), (2.35) и (2.36)
называются соответственно распределением Райса, гаммараспределением и
логарифмически нормальным распределением. 
Описанные ПВ флуктуаций ЭПР и
соответствующие им ПВ амплитуды отраженного сигнала сведены в табл. 2.2.
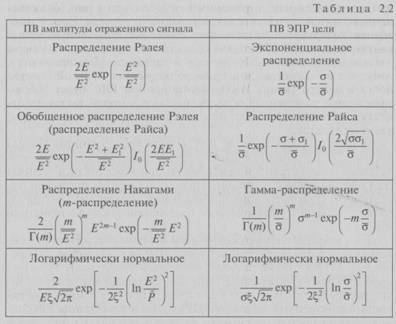
Следует обратить внимание на то,
что ПВ (см. формулы (2.30) и (2.34), а также (2.32) и (2.36)) носят одинаковые
названия, но имеют различные аналитические выражения. Дело в том, что ПВ (см.
формулы (2.34) и (2.36)) описывают флуктуации ЭПР, а ПВ (см. формулы (2.30) и
(2.32)) — флуктуации амплитуды отраженного сигнала. Для того чтобы избежать
путаницы, называя распределение, всегда уточняют, что имеют в виду: ПВ ЭПР
(мощности) или ПВ амплитуды отраженного сигнала.
2.4. Мешающие отражатели. Отражения от
моря и суши
Существенное влияние на работу РЛС
оказывает земная поверхность. Это влияние проявляется двояко.
Во-первых, земная поверхность
рассеивает энергию, излучаемую РЛС, во всех направлениях, в том числе и
обратно к РЛС. Например, взволнованная морская поверхность может создавать
значительное обратное отражение. При решении задачи обнаружения какой-либо
точечной цели с малой ЭПР на фоне отражений от подстилающей поверхности могут
возникнуть ситуации, при которых сигнал, отраженный от моря или суши, окажется
намного интенсивнее сигнала, отраженного от цели. Кроме того, земная
поверхность представляет собой распределенную мешающую цель, размеры которой
существенно превышают размеры элемента разрешения РЛС по углу и дальности. Это
приводит к тому, что в рассмотренном примере облучения морской поверхности в
центре экрана И КО навигационной РЛС будет наблюдаться ярко засвеченная
область, на фоне которой выделить отметку точечной цели (если не предприняты
специальные меры) часто не удается.
Во-вторых, расположение РЛС и цели
возле границы раздела двух сред воздух —земная поверхность создает условия для
многолучевого распространения радиоволн, при котором цель облучается прямой
волной и волной, отраженной от подстилающей поверхности. Интерференция прямой
и отраженной волн — причина ряда явлений, оказывающих воздействие на
характеристики РЛС.
Для уверенного обнаружения цели на
фоне отражений от земной поверхности необходимо, чтобы ЭПР цели существенно
превышала ЭПР элемента разрешения земной поверхности. Последнюю ЭПР часто
называют ЭПР фона. Рассеивающие свойства таких распределенных целей, к которым
относится земная поверхность, характеризует удельная ЭПР  . На вход антенны РЛС одновременно поступают сигналы от
всех мешающих отражателей (например, гребней морских волн), находящихся внутри
элемента разрешения РЛС, поэтому
. На вход антенны РЛС одновременно поступают сигналы от
всех мешающих отражателей (например, гребней морских волн), находящихся внутри
элемента разрешения РЛС, поэтому  где
где  — ЭПР фона; S — площадь элемента разрешения РЛС. Отсюда следует очевидный
вывод: для уменьшения помеховых сигналов от земной поверхности следует
увеличить разрешение РЛС, соответственно уменьшив площадь S ее элемента разрешения. В навигационной РЛС с простым
импульсным сигналом этого можно достигнуть путем уменьшения длительности
излучаемого импульса и сужения ДНА РЛС. Пределы уменьшения элемента разрешения
РЛС ограничены геометрическими размерами полезной цели.
— ЭПР фона; S — площадь элемента разрешения РЛС. Отсюда следует очевидный
вывод: для уменьшения помеховых сигналов от земной поверхности следует
увеличить разрешение РЛС, соответственно уменьшив площадь S ее элемента разрешения. В навигационной РЛС с простым
импульсным сигналом этого можно достигнуть путем уменьшения длительности
излучаемого импульса и сужения ДНА РЛС. Пределы уменьшения элемента разрешения
РЛС ограничены геометрическими размерами полезной цели.
Другие методы уменьшения влияния
помеховых отражений от земной поверхности на работу РЛС основаны на учете
свойств удельной ЭПР. В общем случае удельная ЭПР зависит от вида земной
поверхности, ее геометрических и электрических характеристик, длины волны и
поляризации РЛС, угла скольжения, погодных условий, времени года и ряда других
факторов. Из разнообразных видов земной поверхности кратко остановимся только
на оценке удельной ЭПР моря и суши, покрытой растительностью.
Удельная ЭПР моря. В связи со
сложностью процессов рассеяния радиоволн на реальной морской поверхности
установить простые аналитические соотношения между удельной ЭПР моря и
характеристиками поверхности, параметрами РЛС не представляется возможным. В
инженерной практике в таком случае используют эмпирические модели,
базирующиеся на результатах экспериментальных измерений. Приведем формулу
модели средней удельной ЭПР моря, разработанную сотрудниками Технологического
института Джорджии (США): 
где  — средняя удельная ЭПР на горизонтальной
поляризации, дБ;
— средняя удельная ЭПР на горизонтальной
поляризации, дБ;  — длина волны РЛС, м;
— длина волны РЛС, м;  — угол скольжения, рад (рис. 2.8);
— угол скольжения, рад (рис. 2.8);  — коэффициенты соответственно многолучевого распространения
радиоволн, направления морских волн и скорости ветра.
— коэффициенты соответственно многолучевого распространения
радиоволн, направления морских волн и скорости ветра.
Формула (2.37) справедлива для
диапазона частот от 1 до 10 ГГц при углах скольжения  и средней высоте морских волн
и средней высоте морских волн  Коэффициент
Коэффициент  учитывает взаимодействие прямого и
переотраженного полей (см. рис. 2.8). При условии, что ординаты z морской поверхности распределены по нормальному закону,
учитывает взаимодействие прямого и
переотраженного полей (см. рис. 2.8). При условии, что ординаты z морской поверхности распределены по нормальному закону,

где а — параметр, введенный для
оценки многолучевого распространения радиоволн.
Этот параметр определяется
выражением

Плотность вероятности высоты Н
морских волн подчиняется закону Рэлея:
где а. — среднеквадратическое
отклонение ординат z волнового профиля. Можно показать, что 

При оценке интенсивности волнения
наряду со среднеквадратическим отклонением ординат волнового профиля часто
используют высоту волны 3%-й обеспеченности Н3%. Под ней понимают
такую высоту волны, вероятность превышения которой составляет 3 %, т.е. 
Параметры Н3%. и  связаны соотношениями:
связаны соотношениями:
Коэффициент  в формуле (2.37) имеет вид
в формуле (2.37) имеет вид 
где  — угол между направлением против ветра и
линией визирования антенны PЛC.
— угол между направлением против ветра и
линией визирования антенны PЛC.
Коэффициент  устанавливает связь
устанавливает связь  со скоростью ветра:
со скоростью ветра: 
где vw — скорость ветра, м/с; g — параметр, определяемый выражением 
В стационарном состоянии при
полностью развитом волнении средняя высота морских волн связана со скоростью
ветра формулой vw = 8,67Лс04, где vw измеряется в м/с; hс — в метрах. В этом случае удельная ЭПР
(см. формулу (2.37)) будет зависеть только от средней высоты морских волн.
При изменении скорости ветра (в
нестационарных условиях) изменяется тонкая структура взволнованной поверхности
моря, что ведет к изменению  В этом случае параметры vw и hc следует
вводить в формулу (2.37) независимо.
В этом случае параметры vw и hc следует
вводить в формулу (2.37) независимо.
На вертикальной поляризации для
диапазона частот от 3 до 10 ГГц формула (2.37) примет следующий вид:

На рис. 2.9 представлен график,
иллюстрирующий зависимость средней удельной ЭПР от угла скольжения. Принято
выделять три характерных области изменения  : узкую область малых скользящих углов,
в которой
: узкую область малых скользящих углов,
в которой  ; область «плато», где в достаточно широком секторе углов
(приблизительно от 5 до 70°) удельная ЭПР моря слабо зависит от
; область «плато», где в достаточно широком секторе углов
(приблизительно от 5 до 70°) удельная ЭПР моря слабо зависит от  или
или  ); узкую область
больших углов, близких к направлению зеркального отражения
); узкую область
больших углов, близких к направлению зеркального отражения 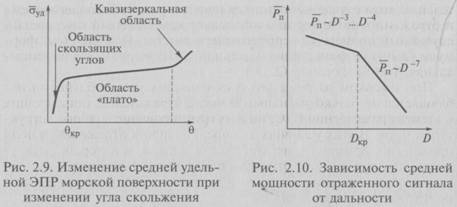
(квазизеркальную область), для
которой наблюдаются большие удельные ЭПР. Переход от первой области ко второй
происходит при некотором критическом угле, определяемом как 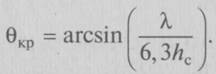
Например, при волнении моря в два
балла для РЛС, работающей на частоте 9,3 ГГц,  кр = 0,94°, при волнении в четыре балла — кр =
0,23°. На частоте 1,25 ГГц при тех же волнениях соответственно кр =
7° и кр =
1,75°.
кр = 0,94°, при волнении в четыре балла — кр =
0,23°. На частоте 1,25 ГГц при тех же волнениях соответственно кр =
7° и кр =
1,75°.
Область скользящих углов — основная
область применения морских навигационных РЛС, антенны которых расположены на
небольшой высоте над уровнем моря. Кроме угла скольжения на удельную ЭПР в этой
области влияет поляризация РЛС. При горизонтальной поляризации удельная ЭПР на
3...5 дБ меньше, чем при вертикальной, в связи с чем с целью уменьшения помех
от моря морские навигационные РЛС используют горизонтальную поляризацию.
Средняя мощность Рп
помехового сигнала как функция расстояния D от РЛС до наблюдаемого участка морской поверхности
представлена на рис. 2.10. Критическое расстояние DKp, при котором происходит изменение наклона кривой, связано с
критическим углом скольжения 9кр простым соотношением DKp = ha/tgKp, где hа — высота антенны РЛС над средним уровнем
моря. Расстояние  соответствует области «плато», для
которой
соответствует области «плато», для
которой  . Показатель степени,
равный -3, получают при условии, что в области «плато» удельная ЭПР моря не
зависит от D, и равный -4, если
. Показатель степени,
равный -3, получают при условии, что в области «плато» удельная ЭПР моря не
зависит от D, и равный -4, если  . Расстояние D > DKp соответствует
области скользящих углов, для которой
. Расстояние D > DKp соответствует
области скользящих углов, для которой  и
и 
Когда площадь элемента разрешения
РЛС велика, помеховый сигнал формируется как сумма сигналов большого числа
отражателей. В этом случае выполняется центральная предельная теорема и
отраженное поле хорошо описывает комплексный гауссовский случайный процесс с
распределением амплитуды Рэлея (см. формулу (2.29)), а флуктуации удельной ЭПР
моря
— экспоненциальная ПВ (см. формулу
(2.33)).
При высоком разрешении и скользящих
углах облучения наблюдается не только уменьшение числа отражателей, попадающих
в элемент разрешения PЛC, но и их
группирование волновой структурой моря. В этих условиях для представления
отраженного поля приходится применять негауссовские модели, в которых флуктуации
амплитуды помех от моря описывают логарифмически нормальным распределением
(см. формулу (2.32)), распределением Вейбулла, К-распределением.
Нормированный энергетический спектр
помех от моря аппроксимируют выражением

где  — частота, соответствующая максимуму
спектра
— частота, соответствующая максимуму
спектра  ;
;  — ширина спектра на уровне -3 дБ; п — показатель степени
(2,5 < п < 5), зависящий от длины волны РЛС (в трехсантиметровом
диапазоне
— ширина спектра на уровне -3 дБ; п — показатель степени
(2,5 < п < 5), зависящий от длины волны РЛС (в трехсантиметровом
диапазоне 
Частота  и ширина спектра
и ширина спектра  определяются следующими выражениями:
определяются следующими выражениями: 
где  — средняя скорость ветра, м/с;
— средняя скорость ветра, м/с;  — длина волны РЛС, см.
— длина волны РЛС, см.
Удельная ЭПР суши. Задача оценки
ЭПР суши более сложна. Это обусловлено не только разнообразием видов земных
поверхностей, но и увеличением числа факторов, оказывающих влияние на ЭПР. Например,
установлены сезонная изменчивость отражательной способности суши, зависимость
характеристик рассеяния от погодных условий, биомассы растительности, запаса
влаги, степени зрелости сельскохозяйственных культур и т.д. В связи с этим
основной объем информации об ЭПР суши получен с помощью измерений в натурных
условиях.
Эмпирическая формула для
определения средней удельной ЭПР земной поверхности, покрытой растительностью,
имеет вид

где С1, — постоянный
коэффициент, определяемый видом растительного покрова.
Например, для лиственного леса
зимой С1 = -40 дБ, летом — С1 = -20 дБ. Формула (2.38)
справедлива при углах скольжения в  и частотах РЛС от 10 до 100 ГГц.
и частотах РЛС от 10 до 100 ГГц.
Как и для морской поверхности, ПВ
удельной ЭПР суши при' больших размерах элемента разрешения РЛС описывает
экспоненциальный закон, при малых углах скольжения и высоком разрешении —
логарифмически нормальный закон.
2.5. Влияние земной поверхности на
сигнал, отраженный от цели
Важную роль в формировании
отраженных сигналов играет земная (подстилающая) поверхность, приводящая к
многолучевым механизмам распространения радиоволн в системе «цель плюс
поверхность раздела». Следствием многолучевого распространения является тот
факт, что характеристики рассеяния целей, расположенных вблизи границы раздела
двух сред, существенно отличаются от характеристик рассеяния этих же целей в
свободном пространстве. Оценим влияние подстилающей поверхности, используя в
качестве цели точечный изотропный отражатель, ЭПР которого в свободном
пространстве равна  . В качестве подстилающей поверхности рассмотрим морскую
поверхность. Отражатель расположен на высоте Нц над средним уровнем
моря (точка В на рис. 2.11). Учитывая, что размеры элемента разрешения РЛС по
дальности существенно превышают геометрические размеры отражателя, а ширина
диаграммы направленности антенн морских навигационных РЛС в вертикальной
плоскости существенно превышает его угловые размеры, можно полагать, что в
точке А размешен изотропный источник монохроматической электромагнитной
волны. Рассматривая случай однопозиционных радиолокационных систем, считаем,
что приемник совмещен с источником излучения и РЛС находится в точке А на
расстоянии D от отражателя. Распределение ординат z морских волн — нормальное с нулевым математическим
ожиданием
. В качестве подстилающей поверхности рассмотрим морскую
поверхность. Отражатель расположен на высоте Нц над средним уровнем
моря (точка В на рис. 2.11). Учитывая, что размеры элемента разрешения РЛС по
дальности существенно превышают геометрические размеры отражателя, а ширина
диаграммы направленности антенн морских навигационных РЛС в вертикальной
плоскости существенно превышает его угловые размеры, можно полагать, что в
точке А размешен изотропный источник монохроматической электромагнитной
волны. Рассматривая случай однопозиционных радиолокационных систем, считаем,
что приемник совмещен с источником излучения и РЛС находится в точке А на
расстоянии D от отражателя. Распределение ординат z морских волн — нормальное с нулевым математическим
ожиданием  и среднеквадратичным отклонением
и среднеквадратичным отклонением  Геометрические параметры задачи таковы, что обычно
выполняются следующие неравенства:
Геометрические параметры задачи таковы, что обычно
выполняются следующие неравенства:  где
где  — обобщенный параметр Рэлея,
— обобщенный параметр Рэлея, 

С учетом многолучевого
распространения рассеянное отражателем поле у антенны PJIC можно представить в следующем виде:

где  — поле, создаваемое отражателем при
распространении электромагнитных волн в свободном пространстве соответственно
вдоль трассы ABA (см. рис. 2.11);
— поле, создаваемое отражателем при
распространении электромагнитных волн в свободном пространстве соответственно
вдоль трассы ABA (см. рис. 2.11);  — поле, распространяющееся по трассе «PЛC —поверхность—отражатель—поверхность— PJIC», на которой отражение
от поверхности происходит дважды;
— поле, распространяющееся по трассе «PЛC —поверхность—отражатель—поверхность— PJIC», на которой отражение
от поверхности происходит дважды;  — поле, распространяющееся по трассе «PJIC —отражатель—
поверхность— PJIC» или «PJIC—поверхность—отражатель—
PJIC» при однократном отражении от границы раздела.
— поле, распространяющееся по трассе «PJIC —отражатель—
поверхность— PJIC» или «PJIC—поверхность—отражатель—
PJIC» при однократном отражении от границы раздела.
Выражение (2.39) не учитывает поле,
отраженное обратно к PJIC собственно морской
поверхностью, распространяющееся по трассе «РЛС — поверхность— PJIC». Характеристики этого
поля рассмотрены в подразд. 2.4.
Подставляя формулу (2.39) в формулу
(2.6), с учетом геометрии (см. рис. 2.11) получим, что ККР отражателя,
расположенного над взволнованной поверхностью моря: 
где  — комплексный коэффициент отражения
(ККО) электромагнитных волн от взволнованной поверхности моря.
— комплексный коэффициент отражения
(ККО) электромагнитных волн от взволнованной поверхности моря.
В силу флуктуационного характера
поверхности моря ККО — случайная величина, значит, ККР, определенный по формуле
(2.40), — также случайная величина.
Определим плотность вероятности
ККР, определенного по формуле (2.40), системы «отражатель + поверхность
раздела». Для построения вероятностной модели ККР необходимо иметь сведения о
ККО от морской поверхности, определяемом в зеркальном направлении. Часто это
направление называют «рассеянием вперед».
Используем известное представление
ККО в виде 
где  — модуль;
— модуль;  — фазовый сдвиг.
— фазовый сдвиг.
В отраженном от взволнованной морской
поверхности волновом поле выделяют детерминированную (когерентную) и случайную
(некогерентную) составляющие, каждая из которых может быть определена
обобщенным параметром  . Тогда проекции х и у комплексного коэффициента отражения Г
определяются следующим образом:
. Тогда проекции х и у комплексного коэффициента отражения Г
определяются следующим образом: 
где хк, ук
— проекции когерентного  — проекции некогерентного ККО, описываемые двумя
независимыми гауссовскими случайными величинами с нулевыми математическими
ожиданиями и одинаковыми дисперсиями
— проекции некогерентного ККО, описываемые двумя
независимыми гауссовскими случайными величинами с нулевыми математическими
ожиданиями и одинаковыми дисперсиями 

Когерентный ККО зависит от волнения
морской поверхности, ее электрических характеристик, угла скольжения, а также
длины волны и поляризации РЛС:

где  — ККО Френеля.
— ККО Френеля.
При горизонтальной поляризации,
характерной для морских навигационных РЛС: 
где  — комплексная относительная диэлектрическая проницаемость
воды,
— комплексная относительная диэлектрическая проницаемость
воды,  — диэлектрическая проницаемость;
— диэлектрическая проницаемость;  — угол диэлектрических потерь).
— угол диэлектрических потерь).
Совместная (двухмерная) ПВ модуля р
и фазового сдвига v комплексного коэффициента отражения (см. формулу (2.41)) от
взволнованной поверхности при нормальном распределении ординат морских волн
определяется выражением: 
Для морской поверхности на основе
экспериментальных измерений параметр может быть определен в виде

В этом случае распределение
амплитуды поля, падающего на рассматриваемый точечный отражатель, будет
подчиняться обобщенному распределению Рэлея (распределению Райса) (см. формулу
(2.30)).
Введем обозначение

где  — модуль нормированного комплексного
коэффициента рассеяния системы «отражатель + поверхность раздела»;
— модуль нормированного комплексного
коэффициента рассеяния системы «отражатель + поверхность раздела»;  — фазовый сдвиг.
— фазовый сдвиг.
Используя правило преобразования
распределений двух функционально связанных соотношением (2.40) величин  после несложных преобразований можно получить совместное
распределение модуля и фазового сдвига нормированного ККР системы «отражатель
+ поверхность раздела» в следующем виде:
после несложных преобразований можно получить совместное
распределение модуля и фазового сдвига нормированного ККР системы «отражатель
+ поверхность раздела» в следующем виде: 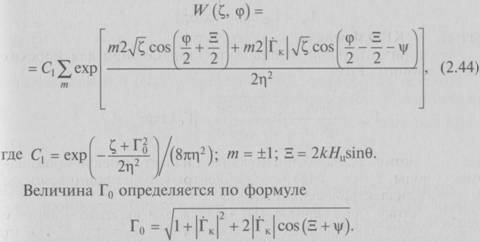
Совместная ПВ (см. формулу (2.44))
позволяет исследовать влияние различных параметров PJIC, отражателя и границы
раздела на флуктуации напряженности поля, рассеянного системой. На рис. 2.12
представлена совместная ПВ модуля и фазового сдвига нормированного ККР (см.
формулу (2.43)), вычисленная по формуле (2.44) при горизонтальной поляризации
поля, 

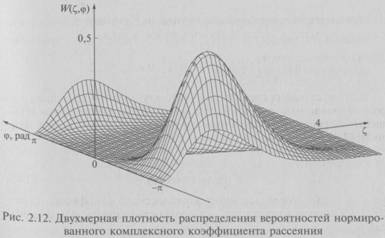
Одномерные П В модуля и фазового
сдвига нормированного ККР системы «отражатель
+ поверхность раздела» определяются
известными соотношениями: 
Подставляя формулу (2.44) в формулу
(2.45) и производя элементарные преобразования, получим
Это распределение в радиотехнике
известно и описывает флуктуации огибающей узкополосного нормального случайного
процесса на выходе квадратичного детектора*.
В некоторых случаях достаточно
знать моменты распределения  . Можно показать, что к-й начальный момент
определяется следующим выражением:
. Можно показать, что к-й начальный момент
определяется следующим выражением: 
где Г(к + 1) — гамма-функция;  —— вырожденная
—— вырожденная
гипергеометрическая функция
(функция Куммера).
Используя тождество  из уравнения
из уравнения
(2.48) легко получить:
математическое ожидание
модуля нормированного ККР системы
«отражатель + поверхность раздела».
Плотность вероятности фазового
сдвига нормированного ККР системы «отражатель + поверхность раздела» определим
после несложных преобразований, подставляя формулу (2.44) в формулу (2.46):

Можно показать, что математическое
ожидание фазового сдвига комплексного коэффициента рассеяния

На рис. 2.13...2.15 представлены
плотности распределения вероятностей модуля и фазового сдвига нормированного
ККР системы «отражатель + поверхность раздела», вычисленные по формулам
(2.47) и (2.51) для различных высот отражателя над средним уровнем моря и
различных параметров  . Рис. 2.13 соответствует
. Рис. 2.13 соответствует 
При постоянном угле скольжения и
фиксированной длине волны электромагнитного поля увеличение параметра  соответствует усилению волнения на морской поверхности.
Флуктуации фазового
соответствует усилению волнения на морской поверхности.
Флуктуации фазового

сдвига ККР (см. формулу (2.43))
связаны с изменением фазового сдвига поля, приходящего к антенне РЛС от
системы «отражатель + поверхность раздела». Это повлечет за собой флуктуации
фазового фронта рассеянной волны и приведет к погрешности измерения угла
места.
Рис. 2.16 иллюстрирует зависимость
математического ожидания (см. формулу (2.52))  фазового сдвига от
параметра
фазового сдвига от
параметра  . На рис. 2.17 представлена аналогичная зависимость для
дисперсии
. На рис. 2.17 представлена аналогичная зависимость для
дисперсии  фазового сдвига, где моменты
фазового сдвига, где моменты  , определены соответственно выражениями
(2.53) и (2.52). Как и на рис. 2.13...2.15, увеличение параметра а0
на рис. 2.16 и 2.17 обусловлено увеличением среднеквадратического отклонения
ординат волнового профиля, т.е. усилением волнения.
, определены соответственно выражениями
(2.53) и (2.52). Как и на рис. 2.13...2.15, увеличение параметра а0
на рис. 2.16 и 2.17 обусловлено увеличением среднеквадратического отклонения
ординат волнового профиля, т.е. усилением волнения.
Из рис. 2.16 следует, что
математическое ожидание фазового сдвига ККР системы «отражатель + поверхность
раздела» зависит от высоты отражателя над средним уровнем морской поверхности.
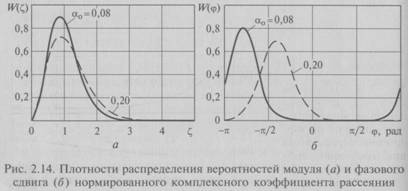
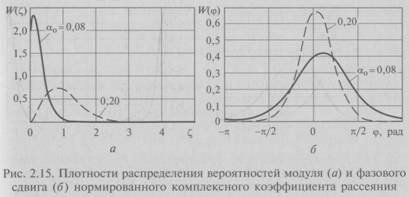
Немонотонный характер этой
зависимости обусловлен многолучевым механизмом распространения полей в
системе. Отрицательный фазовый сдвиг соответствует сигналу, поступающему на
вход радиолокационного приемника через подстилающую поверхность. Этот сигнал
характеризует антипод отражателя и приводит к погрешности определения угловой
координаты.
Рассмотрим флуктуации ЭПР системы
«отражатель + поверхность раздела». ЭПР указанной системы связана с ее ККР
(см. формулу (2.40)) соотношением (2.7). В формулу (2.40), в свою очередь,
входит ККО от взволнованной поверхности моря. Используя представление
последнего по формуле (2.41) и подставляя формулу (2.40) в формулу (2.7),
определим ЭПР системы «отражатель + поверхность раздела» следующим образом:

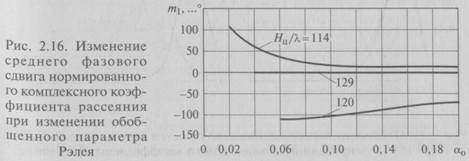
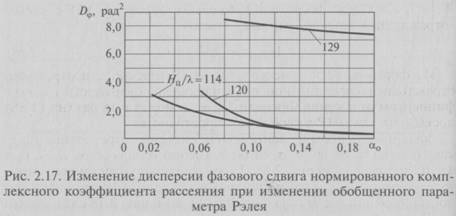
Комплексный коэффициент отражения
(см. формулу (2.41)) представляет собой случайную величину, следовательно, ЭПР
(см. формулу (2.54)) также случайна. Как и в случае с ККО (см. формулу
(2.41)), представим формулу (2.54) в виде суммы двух слагаемых: 
где  — когерентная ЭПР;
— когерентная ЭПР;  — некогерентная ЭПР.
— некогерентная ЭПР.
Первое слагаемое в формуле (2.55)
не содержит случайных величин: 
Второе слагаемое в формуле (2.55)
представляет собой полином по степеням  и
и  :
:

Очевидно, что при гладкой поверхности
 . Для горизонтальной поляризации при малых углах скольжения
. Для горизонтальной поляризации при малых углах скольжения
 и из формулы (2.56) следует формула ЭПР системы «отражатель
+ гладкая граница раздела»
и из формулы (2.56) следует формула ЭПР системы «отражатель
+ гладкая граница раздела»

Из формулы (2.58) следует, что ЭПР
точечного изотропного отражателя вблизи гладкой подстилающей поверхности с коэффициентом
отражения Френеля  может в 16 раз (на 12 дБ) превышать его ЭПР в свободном
пространстве.
может в 16 раз (на 12 дБ) превышать его ЭПР в свободном
пространстве.
Зависимость нормированной ЭПР
системы «отражатель + гладкая граница раздела»  от безразмерного параметра
от безразмерного параметра  при
при  приведена на рис. 2.18. Такой же сильно изрезанный, многолепестковый
характер имеет и зависимость ЭПР от угла
приведена на рис. 2.18. Такой же сильно изрезанный, многолепестковый
характер имеет и зависимость ЭПР от угла  при постоянной высоте Нц. Из
формулы (2.58) и рис. 2.18 следует, что ЭПР системы «отражатель + гладкая
поверхность раздела» является периодической функцией аргумента
при постоянной высоте Нц. Из
формулы (2.58) и рис. 2.18 следует, что ЭПР системы «отражатель + гладкая
поверхность раздела» является периодической функцией аргумента  . Минимумы ЭПР определяются из условия
. Минимумы ЭПР определяются из условия  а максимумы — из условия
а максимумы — из условия 
Разложение ЭПР системы «отражатель
+ поверхность раздела» на когерентную (см. формулу (2.56)) и некогерентную (см.
формулу (2.57)) составляющие произведено по аналогии с разложением ККО (см.
формулу (2.41)). С точки зрения анализа XPЛP такое разложение имеет очень важное значение, поскольку все
флуктуационные члены ККО содержатся лишь в некогерентной компоненте ЭПР и,
следовательно, статистические характеристики этой компоненты позволяют
определить в целом одноименные статистические характеристики ЭПР (см. формулу
(2.54)). Например, из формулы (2.55) следует, что средняя ЭПР системы
«отражатель + + поверхность раздела»

где  — средняя некогерентная ЭПР системы.
Используя методы кумулянтного анализа, из формулы (2.57) получим
— средняя некогерентная ЭПР системы.
Используя методы кумулянтного анализа, из формулы (2.57) получим


Плотность вероятности ЭПР системы
«отражатель + поверхность раздела» определяется выражением

На рис. 2.19 изображены ПВ ЭПР
системы «отражатель + поверхность раздела», вычисленные по формуле (2.59) при
различных значениях параметра  . При расчете принято, что ЭПР отражателя
в свободном пространстве
. При расчете принято, что ЭПР отражателя
в свободном пространстве  длина волны облучающего поля
длина волны облучающего поля  поляризация горизонтальная, угол скольжения
поляризация горизонтальная, угол скольжения  . Изменение параметра произведено путем изменения
средне-квадратического отклонения
. Изменение параметра произведено путем изменения
средне-квадратического отклонения  ординат волнового профиля, и увеличение соответствует усилению морского волнения. Высота отражателя
над уровнем моря Нц = 3,87 м и выбрана из тех соображений, чтобы для
случая гладкого моря усиление ЭПР системы (относительно ЭПР отражателя в
свободном пространстве) составляло 16 раз (12 дБ). В связи с этим при слабом
волнении
ординат волнового профиля, и увеличение соответствует усилению морского волнения. Высота отражателя
над уровнем моря Нц = 3,87 м и выбрана из тех соображений, чтобы для
случая гладкого моря усиление ЭПР системы (относительно ЭПР отражателя в
свободном пространстве) составляло 16 раз (12 дБ). В связи с этим при слабом
волнении  плотность вероятности ЭПР сосредоточена около значения
плотность вероятности ЭПР сосредоточена около значения 
С увеличением волнения в отраженном
от статистически шероховатой морской поверхности волновом поле уменьшается
когерентная компонента ККО, что ведет к уменьшению ЭПР системы «отражатель +
поверхность раздела».
Из выражения (2.59) получим:
математическое ожидание ЭПР


Зависимости нормированных
математического ожидания т1 и дисперсии  ЭПР системы «отражатель
+ поверхность раздела» от параметра
ЭПР системы «отражатель
+ поверхность раздела» от параметра  показаны на рис. 2.20.
показаны на рис. 2.20.
Из рис. 2.20 видно, что ЭПР системы
«отражатель + поверхность раздела» может существенно превышать ЭПР собственно
отражателя, измеренную в свободном пространстве.
Для количественной характеристики
эффекта усиления обратного рассеяния оценим вероятность выброса флуктуаций ЭПР
системы за фиксированный уровень  где х
где х
— коэффициент усиления ЭПР.
Указанная вероятность определяется следующим образом: 
Результаты численного
интегрирования выражения (2.63) представлены на рис. 2.21, где видно, что даже
при относительно больших значениях параметра  , вероятность выброса флуктуаций ЭПР
системы за фиксированный уровень
, вероятность выброса флуктуаций ЭПР
системы за фиксированный уровень  может быть высока.
может быть высока.
В частном случае интеграл в
выражении (2.63) можно вычислить аналитически. При условии, что  , выражение (2.63) примет следующий вид:
, выражение (2.63) примет следующий вид:
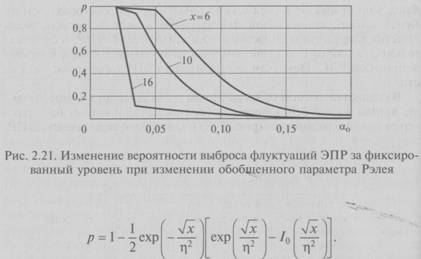
Таким образом, характеристики
рассеяния отражателя, расположенного вблизи границы раздела двух сред,
существенно отличаются от характеристик этого же отражателя в свободном пространстве.
2.6. Радиолокационная заметность
объектов.
Способы снижения или увеличения
Снижение радиолокационной
заметности объектов требует уменьшения ЭПР цели (по крайней мере, до уровня ЭПР
фона), увеличение — увеличения ЭПР цели.
Уменьшение ЭПР целей. Выделяют три
метода, с помощью которых возможно уменьшение ЭПР целей. Первый метод связан с
выбором оптимальной формы и конструкции, второй — с применением материалов и
покрытий, поглощающих электромагнитные волны, третий метод основан на
использовании реактивных нагрузок (например, настраиваемых щелей или шлейфов,
небольших ребер, закрепляемых на деталях радиолокационных целей, имеющих
размеры, существенно превышающие длину электромагнитной волны).
Первые два метода известны со
времен Второй мировой войны, причем долгое время разработке радиопоглощающих
материалов и покрытий уделялось большее внимание, чем совершенствованию формы
цели. Это является следствием «принципа сохранения ЭПР», который отражает
постоянно наблюдаемое явление: любая попытка уменьшить ЭПР без применения
поглощающих материалов и покрытий в определенных секторах углов наблюдения
приводит к увеличению ЭПР в других секторах. Тем не менее выбор оптимальной
формы цели может оказаться очень полезным средством снижения моностатической
ЭПР, а следовательно, радиолокационной заметности по отношению к
однопозиционной PЛC. При этом
бистатическая ЭПР цели может возрасти.
В высокочастотной области (когда
размеры цели намного больше длины волны РЛС) форма поверхности цели влияет на
характер рассеяния радиоволн (рис. 2.22) и частотную зависимость ЭПР:

Для уменьшения ЭПР с уменьшением
длины волны необходимо исключить вклад зеркального отражения. Для гладких
плоских и искривленных поверхностей зеркальное отражение в обратном направлении
сосредоточено в узком секторе углов облучения, содержащем нормаль к
поверхности. Например, у прямоугольной пластины шириной 1 м ширина основного лепестка нормированной диаграммы ЭПР по уровню -3 дБ при  составляет 0,4°. Для двугранного уголкового отражателя,
грани которого пересекаются под прямыми углами, этот сектор содержит биссектрису
угла и существенно шире (около 30°).
составляет 0,4°. Для двугранного уголкового отражателя,
грани которого пересекаются под прямыми углами, этот сектор содержит биссектрису
угла и существенно шире (около 30°).
При тех углах обзора, для которых
желательно уменьшить ЭПР, необходимо, чтобы цели была придана форма вершины или
кромки. С точки зрения уменьшения ЭПР идеальным является придание цели
остроконечной, стреловидной формы относительно облучающей ее РЛС. Например,
форма, отвечающая указанным требованиям, заложена в конструкции «летающее
крыло» бомбардировщика В-2. Для кораблей реализовать такие формы не представляется
возможным. Особое место в уменьшении ЭПР за счет изменения формы корабля
занимает устранение уголковых отражателей. Если рассматривать явление
отражения от уголков геометрически, то каждый падающий луч отражается два или
более раз и выходит из раскрыва точно вдоль того же направления, по которому
он поступал. Следовательно, отклонение угла между отражающими поверхностями от
прямого в сторону увеличения (превращение прямого угла в тупой) приведет к
тому, что многократно отраженные лучи перестанут распространяться по направлению
на облучающую РЛС. При известных размерах отражающих плоскостей b и а, а также заданной величине уменьшения ЭПР g можно оценить требуемую оптимальную величину угла  двугранного уголкового отражателя:
двугранного уголкового отражателя:

Принцип действия радиопоглощающих
покрытий (РПП) основан на превращении энергии падающих радиоволн в тепло. Теоретически
падающий поток энергии может быть поглощен полностью, но практически часть
энергии всегда рассеивается в окружающее пространство, в том числе и в
обратном направлении. Качество РПП оценивается обычно коэффициентом отражения,
который определяется как отношение плотности потока энергии, рассеянной в
обратном направлении, к плотности потока падающей энергии. При этом имеется в
виду, что падение плоской волны на плоскую поверхность РПП, нанесенного на
металлическую плоскость, происходит по нормали.
Минимизация коэффициента отражения
может быть достигнута несколькими способами. В согласованных РПП используется
принцип «мягкого входа», когда электрические параметры материала РПП плавно
изменяются по глубине от согласованных со свободным пространством до сильно
поглощающих вблизи металла.
В интерференционных РПП, имеющих
слоистую структуру, используется принцип многократного отражения внутри слоев с
поглощением и частичным противофазным гашением радиоволн. Во всех случаях для
создания РПП используются материалы либо с диэлектрическими, либо с магнитными
потерями. Диэлектрические потери связаны с возникновением токов проводимости и
с диэлектрическим гистерезисом вещества, а магнитные — с магнитным
гистерезисом вещества. Для снижения ЭПР объектов военной техники пригодными
считаются интерференционные РПП, поскольку они могут иметь относительно
небольшую толщину. Минимальную толщину имеют однослойные РПП резонансного
типа, обеспечивающие снижение ЭПР в узком диапазоне длин волн. По мере
расширения диапазонности РПП их толщина возрастает из- за увеличения числа
слоев. Проектирование РПП — сложные материаловедческая и технологическая
задачи, так как требует, с одной стороны, разработки радиоматериалов с
заданными проницаемостями в определенном диапазоне длин волн, а с другой —
разработки технологии многослойных структур с заданными физико-механическими
параметрами.
Применение РПП имеет свою
специфику. Считаются давно и бесспорно установленными следующие особенности:
применение РПП неэффективно на объектах, сравнимых или меньших длины волны РЛС;
применение РПП неэффективно на цилиндрических объектах, радиус кривизны которых
сравним или меньше длины волны; применение РПП неэффективно при падении
радиоволн на РПП с направлений, существенно отличающихся от направления
нормали к его поверхности.
Снижение ЭПР целей, размеры которых
сравнимы с длиной волны или меньше нее, осуществляют с помощью реактивных
нагрузок. Этот метод имеет отношение, например, к защите кораблей от
загоризонтных РЛС, работающих в длинноволновой части дециметрового, а также в
метровом и декаметровом диапазонах. Сущность его заключается в компенсации
рассеянного поля путем размещения на поверхности металлического тела или вблизи
нее линейных элементов (антенн) в виде металлических штырей, шлейфов, диполей
и петель, а также щелей в металлических экранах с поглощающими или комплексными
нагрузками. Часть падающей энергии поглощается нагрузками, а другая часть компенсируется
противофазными токами в линейных элементах. Последнее равносильно частичному
перераспределению рассеянной энергии по направлениям при уменьшении рассеяния в
обратном направлении. Как правило, снижение ЭПР носит резонансный характер.
Диапазонность достигается увеличением поглощения в нагрузках и усложнением
системы линейных элементов.
Увеличение ЭПР целей. Для увеличения ЭПР целей применяются
пассивные радиолокационные отражатели. По типу конструкции различаются
уголковые и линзовые отражатели, группы из уголковых отражателей и многоярусные
решетки, отражатели- антенны и т.д. Уголковые отражатели обладают достаточно
большой ЭПР. Например, максимальная ЭПР трехгранного уголкового отражателя с
треугольными гранями равна  , где а — размер ребра. С целью расширения
диаграммы ЭПР и получения всенаправленного отражения несколько таких
отражателей объединяют в единую конструкцию. Группы из восьми уголковых отражателей
(рис. 2.23) называются октаэдрами. Диаграмма ЭПР октаэдра носит
интерференционный (изрезанный) характер.
, где а — размер ребра. С целью расширения
диаграммы ЭПР и получения всенаправленного отражения несколько таких
отражателей объединяют в единую конструкцию. Группы из восьми уголковых отражателей
(рис. 2.23) называются октаэдрами. Диаграмма ЭПР октаэдра носит
интерференционный (изрезанный) характер.
Среди линзовых отражателей
"наибольшее распространение получили линзы Люнеберга, часто используемые
для повышения радиолокационной заметности яхт, маяков, буев. Т4х отличительной
особенностью является всенаправленный характер отражения. Сферическая линза
Люнеберга — диэлектрическая линза, коэффициент рефракции п которой определяется
соотношением
где r — нормированный радиус линзы (равный 1 на поверхности
сферы), а ее диэлектрическая проницаемость 
Траектория распространения
радиоволны в линзе Люнеберга (рис. 2.24) проходит по эллиптической орбите, ось
которой образует угол  с осью линзы. Лучи концентрируются в точке Р на поверхности
линзы и отражаются от металлического покрытия. Всенаправленную диаграмму ЭПР
получают посредством нанесения на экватор линзы металлического отражающего
пояса (рис. 2.25). Небольшая часть падающих лучей отражается и рассеивается
металлическим поясом. Остальные лучи, попадая на поверхность линзы, преломляются
и фокусируются в точке Р. Сфокусированные
с осью линзы. Лучи концентрируются в точке Р на поверхности
линзы и отражаются от металлического покрытия. Всенаправленную диаграмму ЭПР
получают посредством нанесения на экватор линзы металлического отражающего
пояса (рис. 2.25). Небольшая часть падающих лучей отражается и рассеивается
металлическим поясом. Остальные лучи, попадая на поверхность линзы, преломляются
и фокусируются в точке Р. Сфокусированные
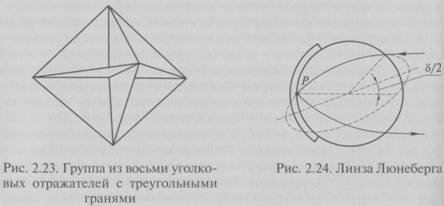

лучи падают на внутреннюю поверхность
металлического пояса, отражаются, снова проходят через внутреннюю часть линзы
и распространяются в обратном направлении. В горизонтальной плоскости
диаграмма ЭПР линзы близка к диаграмме ЭПР точечного изотропного отражателя.
Ширина диаграммы ЭПР в вертикальной плоскости зависит от ширины металлического
отражающего пояса. Для пояса с центральным углом  ширина диаграммы ЭПР в вертикальной плоскости составляет
угол
ширина диаграммы ЭПР в вертикальной плоскости составляет
угол  ЭПР всенаправленного линзового отражателя определяется
соотношением
ЭПР всенаправленного линзового отражателя определяется
соотношением
где R — радиус линзы.
Из отражателей-антенн остановимся
на решетках Ван-Атта, представляющих собой линейную решетку из N пар одинаковых
соединенных волноводами или фидерами антенн. Все соединительные линии имеют
одинаковую электрическую длину. Сигнал, принимаемый каждой из пары антенн,
переизлучается другой антенной. В качестве антенн используются либо рупорные
(или диэлектрические) антенны, либо полуволновые вибраторы. При идеальном согласовании
антенн с их трактами максимальная ЭПР линейной решетки  где
где  — ЭПР одной короткозамк- нутой антенны. Как и трехгранный
уголковый отражатель, в достаточно широком секторе углов решетка формирует
сильное отраженное поле, распространяющееся в направлении на источник
излучения, т.е. на PЛC.
— ЭПР одной короткозамк- нутой антенны. Как и трехгранный
уголковый отражатель, в достаточно широком секторе углов решетка формирует
сильное отраженное поле, распространяющееся в направлении на источник
излучения, т.е. на PЛC.
Контрольные вопросы
1.Что понимают под характеристиками
радиолокационного рассеяния?
2.Приведите определение эффективной
площади рассеяния цели.
3.Что такое удельная ЭПР и как она
определяется в различных случаях?
4.Частотная характеристика
цилиндрического отражателя с радиусом r и длиной l при падении поля
перпендикулярно образующей в
высокочастотной области рассеяния
имеет вид  . Получите выражение для импульсной характеристики
отражателя.
. Получите выражение для импульсной характеристики
отражателя.
5.Приведите математические модели
поля, отраженного целью, справедливые во временной и частотной областях при
статическом рассеянии.
6.Приведите обобщенную
амплитудно-частотную характеристику отражателя простой формы и опишите его
рассеивающие свойства в низкочастотной, резонансной и высокочастотной областях
рассеяния.
7.Флуктуации ЭПР цели подчиняются
экспоненциальному закону. Получите выражение, описывающее плотность
распределения вероятностей амплитуды отраженного сигнала.
8.Приведите зависимость удельной ЭПР
морской поверхности от угла скольжения поля и дайте характеристику различных
областей рассеяния.
9.Приведите математическую модель
поля, отраженного от цели, расположенной вблизи подстилающей поверхности.
10.Каковы основные причины усиления
обратного рассеяния от цели вблизи границы раздела двух сред?
11.Приведите зависимость ЭПР
точечного изотропного отражателя от высоты над границей раздела двух сред.
12.Каковы методы уменьшения ЭПР?
13.Поясните механизмы формирования
отраженного поля в линзах Люнеберга.