2. ОСНОВЫ КОНТРОЛЯ И
ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ЦИФРОВЫХ СИСТЕМ
2.1. Основные
понятия и определения
Одним
из наиболее эффективных способов улучшения эксплуатационно-технических
характеристик цифровых систем, занявших доминирующее положение в современных
телекоммуникационных системах является использование при их эксплуатации
методов и средств контроля и технической диагностики.
Техническая
диагностика представляет собой область знаний, позволяющая с
заданной достоверностью разделять неисправное и исправное состояния
систем и цель ее состоит в локализации неисправностей и в восстановлении
исправного состояния системы. С точки зрения системного подхода средства
контроля и технической диагностики целесообразно рассматривать как составную
часть подсистемы технического обслуживания и ремонта, т.е системы технической
эксплуатации[11,13,37].
Рассмотрим основные
понятия и определения, применяемые для описания и
характеристики методов контроля и диагностики [11,13,37].
Техническое обслуживание - это комплекс
работ (операций) для поддержания системы в исправном или
работоспособном состоянии.
Ремонт - комплекс операций по восстановлению
работоспособности и восстановлению ресурсов системы или ее составных частей.
Ремонтопригодность - свойство системы, заключающееся в
приспособленности к предупреждению и обнаружению причин возникновения ее
отказов и восстановлению работоспособного состояния путем проведения
технического обслуживания и ремонта.
В зависимости от
сложности и объема работ, характера неисправностей предусматриваются два вида
ремонта цифровых систем:
- неплановый текущий ремонт системы;
- неплановый средний ремонт системы.
Текущий ремонт - ремонт, выполняемый для обеспечения или восстановления
работоспособности системы и состоящий в замене или восстановлении
ее отдельных частей.
Средний ремонт - ремонт, выполняемый для
восстановления исправности и частичного восстановления ресурса с заменой или
восстановлением составных частей ограниченной номенклатуры и контролем
технического состояния составных частей, выполняемом в объеме, установленном
нормативно-технической документацией.
Одним из важных
понятий в технической диагностике является
техническое состояние объекта.
Техническое состояние - совокупность подверженных
изменению в процессе производства или эксплуатации свойств
объекта, характеризуемая в определенный момент признаками, установленными
нормативно-технической документацией.
Контроль технического состояния - определение вида
технического состояния.
Вид технического состояния - совокупность
технических состояний, удовлетворяющих (или неудовлетворяющих) требованиям,
определяющим исправность, работоспособность или правильность функционирования
объекта.
Различают следующие
виды состояния объекта:
- исправное или неисправное состояние,
- работоспособное или неработоспособное
состояния,
- полное или частичное функционирование.
Исправное - техническое
состояние, при котором объект соответствует всем установленным требованиям.
Неисправное - техническое
состояние, при котором объект не соответствует хотя бы одному из установленных
требований нормативных характеристик.
Работоспособное - техническое
состояние, при котором объект способен выполнять заданные функции, сохраняя
значения заданных параметров в установленных пределах.
Неработоспособное - техническое состояние, при котором значение хотя
бы одного заданного параметра, характеризующего способность объекта
выполнять заданные функции, несоответствует установленным требованиям.
Правильное функционирование - техническое
состояние, при котором объект выполняет все те регламентированные функции,
которые требуются в текущий момент времени,
сохраняя значения заданных параметров их выполнения в установленных
пределах.
Неправильное функционирование - техническое
состояние, при котором объект не выполняет части регламентированных
функций, требуемых в текущий момент времени или не сохраняет
значения заданных параметров их выполнения в установленных пределах.
Из определений
технических состояний объекта следует, что в состоянии
исправности объект всегда работоспособен, в состоянии работоспособности
правильно функционирует во всех режимах, а в состоянии неправильное
функционирование-неработоспособен и неисправен. Правильно функционирующий
объект может быть неработоспособным, а значит, неисправным. Работоспособный
объект может быть также неисправным.
Рассмотрим некоторые
определения, связанные с понятием контролепригодности
и техническим диагностированием.
Контролепригодность - свойство объекта, характеризующее
его приспособленность к проведению контроля заданными
средствами.
Показатель контролепригодности - количественная
характеристика контролепригодности.
Уровень контролепригодности - относительная
характеристика контролепригодности, основанная на сравнении
совокупности показателей контролепригодности оцениваемого объекта с
соответствующей совокупностью базовых показателей.
Техническое диагностирование - процесс
определения технического состояния объекта с определенной точностью.
Поиск дефекта - диагностирование, целью которого является определение
места и, при необходимости, причины и вида дефекта.
Тест диагностирования - одно или несколько тестовых
воздействий и последовательность их выполнения, обеспечивающие
диагностирование.
Проверяющий тест - тест диагностирования для проверки
исправности или работоспособности объекта.
Тест поиска дефекта - тест диагностирования для поиска
дефекта.
Система технического диагностирования - совокупность
средств и объекта диагностирования и, при необходимости,
исполнителей, подготовленная к диагностированию или осуществляющая его
по правилам, установленным соответствующей документацией.
Результатом
диагностирования является заключение о техническом состоянии объекта с
указанием, при необходимости, места, вида и причины дефекта.
Число состояний, которые необходимо различить в результате
диагностирования, определяется глубиной поиска неисправности.
Глубина поиска неисправности - степень
детализации при техническом диагностировании, указывающая до какой составной
части объекта определяется место неисправности.
2.2. Задачи и
классификация систем технической диагностики
Все более
возрастающие требования к надежности цифровых систем вызывают необходимость
создания и внедрения современных методов и
технических средств контроля и диагностики для различных стадий
жизненного цикла. Как отмечалось ранее переход к широкому применению БИС, СБИС
и МПК в цифровых системах создал вместе с бесспорными преимуществами и ряд
серьезных проблем в их эксплуатационном обслуживании, связанных в первую
очередь с процессами контроля и диагностики. Известно, что затраты
на поиск и устранение неисправностей на этапе производства составляют от 30% до
50% общих затрат на изготовление устройств. На этапе же
эксплуатации не менее 80% времени восстановления цифровой системы приходится на поиск
неисправного сменного элемента. В целом затраты, связанные с обнаружением,
поиском и устранением неисправности возрастают в 10 кратном размере при
прохождении неисправности через каждый технологический этап
и от входного контроля интегральных микросхем до выявления отказа
на этапе эксплуатации обходятся в 1000 раз дороже. Успешное решение подобной
задачи возможно только на основе комплексного подхода к вопросам контроля диагностики,
так как системы диагностики используются на всех этапах жизни цифровой системы.
Это требует дальнейшего повышения интенсивности работ по
обслуживанию, восстановлению и ремонта на этапах производства и
эксплуатации.
Общие задачи
контроля и диагностики цифровых систем и ее составных частей обычно
рассматриваются с точки зрения основных стадий разработки, производства и
эксплуатации. Наряду с общими подходами к решению этих задач имеются и
существенные различия, обусловленные специфическими особенностями присущими
этим стадиям [1,7,22]. На стадии разработки цифровых систем решаются две задачи контроля
и диагностики:
1. Обеспечение
контролепригодности цифровой системы в
целом и ее
составных частей.
2. Отладка, проверка
исправности и работоспособности составных частей
и цифровой системы в целом.
При контроле и
диагностике в условиях производства цифровой системы обеспечивается решение
следующих задач:
1. Выявление и
отбраковка дефектных компонентов и узлов на ранних
этапах изготовления.
2. Сбор
и анализ статистической информации о дефектах и типах
неисправностей.
3. Снижение
трудоемкости и, соответственно, стоимости контроля и
диагностики.
Контроль и
диагностика цифровой системы в условиях эксплуатации имеют следующие
особенности:
1. В большинстве
случаев достаточна локализация неисправностей на
уровне конструктивно-съемного
узла, как правило, типового
элемента замены
(ТЭЗ).
2. Высока
вероятность появления к моменту ремонта не более одной
неисправности.
3. В большинстве цифровых
систем предусмотрены некоторые
возможности контроля
и диагностики.
4. Возможно ранее
обнаружение предотказовых состояний при
профилактических
осмотрах.
Таким образом, для
объекта, подлежащего техническому диагностированию должны быть установлены вид
и назначение системы диагностирования. Согласно [1,14,21] устанавливаются
следующие основные области применения систем диагностирования:
а) на этапе производства объекта: в
процессе наладки, в процессе
приемки;
б) на этапе
эксплуатации объекта; при техническом обслуживании в
процессе применения,
при техническом обслуживании в процессе
хранения, при
техническом обслуживании в процессе транспортировки;
в) при ремонте
изделия: перед ремонтом, после ремонта.
Системы
диагностирования предназначаются для решения одной или
нескольких задач: проверки исправности; проверки работоспособности; проверки
функционирования: поиска дефектов. При этом составляющими
системы диагностирования являются: объект технического диагностирования, под
которым понимают объект или его составные части, техническое состояние
которых подлежит определению, средства технического диагностирования, совокупность измерительных приборов, средства
коммутации и сопряжения с объектом.
Техническое
диагностирование (ТД) осуществляется в
системе технического диагностирования (СТД), которая представляет
собой совокупность средств и
объекта диагностирования и при
необходимости исполнителей,
подготовленная к диагностированию и
осуществляющая его по
правилам, установленным документацией.
Составляющими
системы являются:
объект технического
диагностирования (ОТД), под
которым понимают системы
или его составные
части, техническое состояние
которых подлежит определению,
и средства технического диагностирования - совокупность
измерительных приборов, средств
коммутации и сопряжения
с ОТД.
Система
технического диагностирования работает
в соответствии с алгоритмом
ТД, который представляет
совокупность предписаний о проведении
диагностирования.
Условия
проведения ТД, включающие
состав диагностических параметров (ДП), их
предельно допустимые наименьшие
и наибольшие предотказовые значения,
периодичность диагностирования
изделия и эксплуатационные параметры применяемых средств, определяют режим
технического диагностирования
и контроля.
Диагностический параметр (признак)- параметр,
используемый в установленном порядке
для определения технического
состояния объекта.
Системы
технического диагностирования
(СТД) могут быть
различными по своему
назначению, структуре, месту
установки, составу, конструкции,
схемотехническим решениям. Они
могут быть классифицированы по
ряду признаков, определяющих их назначение,
задачи, структуру, состав
технических средств:
по степени охвата
ОТД; по характеру
взаимодействия между ОТД и
системой технического диагностики и контроля (СТДК); по используемым
средствам технического диагностирования и контроля; по
степени автоматизации ОТД.
По степени
охвата системы
технического диагностирования
могут быть разделены
на локальные и
общие. Под локальными понимают
системы технического
диагностирования, решающие одну
или несколько перечисленных
выше задач - определения работоспособности или
поиск места отказа. Общими – называют системы
технического
диагностирования, решающие все
поставленные задачи диагностики.
По характеру
взаимодействия ОТД со
средствами технического диагностирования
(СрТД) системы технического диагностирования подразделяют на:
системы с
функциональной диагностикой, в
которых решение задач
диагностики осуществляется в процессе
функционирования ОТД по
своему назначению, и системы
с тестовой диагностикой, в которых
решение задач диагностики
осуществляется в специальном
режиме работы ОТД путем
подачи на него тестовых
сигналов.
По
используемым средствам технического диагностирования системы ТД
можно разделить на:
системы
с универсальными средствами ТДК (например ЭВМ);
системы со специализированными средствами (стенды, имитаторы, специализированные ЭВМ);
системы с внешними
средствами, в которых средства
и ОТД конструктивно отделены
друг от друга;
системы со
встроенными средствами, в
которых ОТД и СТД конструктивно представляют
одно изделие.
По степени
автоматизации системы
технического диагностирования
можно разделить на:
автоматические, в которых
процесс получения информации
о техническом состоянии ОТД
осуществляется без участия
человека;
автоматизированные, в которых
получение и обработка информации
осуществляется с частичным
участием человека;
неавтоматизированные
(ручные), в которых получение
и обработка информации осуществляется человеком-оператором.
Аналогичным образом
могут классифицироваться и
средства технического диагностирования: автоматические; автоматизированные; ручные.
Применительно к объекту
технического диагностирования
системы диагностики должны: предупреждать постепенные
отказы; выявлять неявные отказы; осуществлять поиск
неисправных узлов, блоков, сборочных единиц
и локализовать место
отказа.
2.3. Показатели
диагностирования и контролепригодности
Как указывалось
ранее, процесс определения технического состояния объекта при диагностировании
предусматривает использование диагностических показателей.
Диагностические
показатели представляют набор характеристик объекта, используемые для оценки
его технического состояния. Показатели диагностирования
определяют при проектировании, испытании и эксплуатации системы
диагностирования и используют при сравнении различных вариантов
последних. Согласно [15] устанавливаются следующие показатели
диагностирования:
1. Вероятность
ошибки диагностирования вида  - вероятность совместного наступления двух событий: объект
диагностирования находится в техническом состоянии
- вероятность совместного наступления двух событий: объект
диагностирования находится в техническом состоянии  , а в результате диагностирования
считается находящимся в техническом состоянии
, а в результате диагностирования
считается находящимся в техническом состоянии  (при
(при  показатель
показатель  , является
вероятностью правильного определения технического состояния объекта
диагностирования)
, является
вероятностью правильного определения технического состояния объекта
диагностирования)
 , (2.1)
, (2.1)
где
 - число состояний
средства диагностирования;
- число состояний
средства диагностирования;
 - априорная
вероятность нахождения объекта диагностирования в состоянии ;
- априорная
вероятность нахождения объекта диагностирования в состоянии ;
 - априорная вероятность нахождения средства диагностирования
в состоянии
- априорная вероятность нахождения средства диагностирования
в состоянии  ;
;
 - условная вероятность того, что в результате
диагностирования объект диагностирования признается находящимся в состоянии при условиях, что
он находится в состоянии и средство диагностирования
находится в состоянии ;
- условная вероятность того, что в результате
диагностирования объект диагностирования признается находящимся в состоянии при условиях, что
он находится в состоянии и средство диагностирования
находится в состоянии ;
 - условная вероятность получения результата "объект
диагностирования находится в состоянии " при условии, что средство диагностирования
находится в состоянии ;
- условная вероятность получения результата "объект
диагностирования находится в состоянии " при условии, что средство диагностирования
находится в состоянии ;
 - условная вероятность нахождения объекта диагностирования в
состоянии при условиях, что
получен результат "объект диагностирования находится в состоянии " и средство диагностирования
находится в состоянии .
- условная вероятность нахождения объекта диагностирования в
состоянии при условиях, что
получен результат "объект диагностирования находится в состоянии " и средство диагностирования
находится в состоянии .
2. Апостериорная
вероятность ошибки диагностирования вида  - вероятность
нахождения объекта диагностирования в состоянии при условии, что получен результат "объект
диагностирования находится в техническом состоянии "(при =) показатель
- вероятность
нахождения объекта диагностирования в состоянии при условии, что получен результат "объект
диагностирования находится в техническом состоянии "(при =) показатель  является
апостериорной вероятностью правильного определения
технического состояния).
является
апостериорной вероятностью правильного определения
технического состояния).
 , (2.2)
, (2.2)
где  - число состояний
объекта.
- число состояний
объекта.
3. Вероятность
правильного диагностирования D - полная вероятность того, что система диагностирования
определяет то техническое состояние, в котором действительно находится объект диагностирования.
 . (2.3)
. (2.3)
4. Средняя
оперативная продолжительность диагностирования
 - математическое ожидание оперативной продолжительности одно-
- математическое ожидание оперативной продолжительности одно-
кратного диагностирования.
 , (2.4)
, (2.4)
где  - средняя оперативная
продолжительность диагностирования объекта,
находящегося в состоянии ;
- средняя оперативная
продолжительность диагностирования объекта,
находящегося в состоянии ;
 - оперативная продолжительность
диагностирования объекта, находящегося в состоянии при условии, что
средство диагностирования находится в состоянии .
- оперативная продолжительность
диагностирования объекта, находящегося в состоянии при условии, что
средство диагностирования находится в состоянии .
Величина включает
продолжительность выполнения вспомогательных операций диагностирования и
продолжительность собственно диагностирования.
5. Cредняя стоимость диагностирования  - математическое ожидание стоимости
однократного диагностирования.
- математическое ожидание стоимости
однократного диагностирования.
 , (2.5)
, (2.5)
где  - средняя стоимость
диагностирования объекта, находящегося в состоянии ;
- средняя стоимость
диагностирования объекта, находящегося в состоянии ;
 - стоимость диагностирования
объекта, находящегося в состоянии при условии, что
средство диагностирования находится в состоянии . Величина включает
амортизационные затраты диагностирования, затраты на эксплуатацию системы
диагностирования и стоимость износа объекта диагностирования.
- стоимость диагностирования
объекта, находящегося в состоянии при условии, что
средство диагностирования находится в состоянии . Величина включает
амортизационные затраты диагностирования, затраты на эксплуатацию системы
диагностирования и стоимость износа объекта диагностирования.
6. Средняя
оперативная трудоемкость диагностирования  - математическое ожидание оперативной трудоемкости
проведения однократного диагностирования
- математическое ожидание оперативной трудоемкости
проведения однократного диагностирования
 , (2.6)
, (2.6)
где  - средняя оперативная
трудоемкость диагностирования при нахождении объекта в
состоянии ;
- средняя оперативная
трудоемкость диагностирования при нахождении объекта в
состоянии ;
 - оперативная
трудоемкость диагностирования объекта, находящегося в состоянии при условии, что
средство диагностирования находится в состоянии .
- оперативная
трудоемкость диагностирования объекта, находящегося в состоянии при условии, что
средство диагностирования находится в состоянии .
7. Глубина поиска
дефекта L - характеристика поиска
дефекта, задаваемая указанием составной части объекта
диагностирования или ее участка с точностью, до которых
определяется место дефекта.
Рассмотрим теперь
показатель контролепригодности. Контролепригодность обеспечивается на стадиях
разработки и изготовления и должна устанавливаться в технических
заданиях на разработку и модернизацию изделия.
Согласно [16]
установлены следующие показатели контролепригодности и формулы для их расчета:
1. Коэффициент полноты проверки исправности
(работоспособности, правильного функционирования):
 , (2.7)
, (2.7)
где 
 -
суммарная интенсивность отказов
проверяемых составных частей системы на принятом уровне деления;
-
суммарная интенсивность отказов
проверяемых составных частей системы на принятом уровне деления;
 – суммарная интенсивность отказов всех
составных частей системы на принятом уровне деления.
– суммарная интенсивность отказов всех
составных частей системы на принятом уровне деления.
2.
Коэффициент
глубины поиска:
 , (2.8)
, (2.8)
где  – число однозначно
различимых составных частей системы на
принятом уровне деления, с точностью до которого определяется место
дефекта;
– число однозначно
различимых составных частей системы на
принятом уровне деления, с точностью до которого определяется место
дефекта;
 – общее число составных частей системы на принятом уровне
деления, с точностью до которых требуется определение места дефекта.
– общее число составных частей системы на принятом уровне
деления, с точностью до которых требуется определение места дефекта.
3.
Длина
теста диагностирования:
 (2.9)
(2.9)
где | | - число тестовых воздействий.
| - число тестовых воздействий.
4.
Среднее время подготовки системы к диагностированию заданным числом
специалистов:
 , (2.10)
, (2.10)
где  - среднее
время установки снятия измерительных
преобразователей и других устройств, необходимых для диагностирования;
- среднее
время установки снятия измерительных
преобразователей и других устройств, необходимых для диагностирования;
 – среднее время
машинно-демонтажных работ на системы, необходимых для подготовки к
диагностированию.
– среднее время
машинно-демонтажных работ на системы, необходимых для подготовки к
диагностированию.
5.
Средняя трудоёмкость подготовки к диагностированию:
 , (2.11)
, (2.11)
где  – средняя трудоёмкость установки и снятия
преобразователей и других устройств, необходимых для диагностирования;
– средняя трудоёмкость установки и снятия
преобразователей и других устройств, необходимых для диагностирования;
 – средняя трудоёмкость
монтажа – демонтажа работ на объект для обеспечения доступа к контрольным
точкам и приведение объекта в исходное состояние после диагностирования.
– средняя трудоёмкость
монтажа – демонтажа работ на объект для обеспечения доступа к контрольным
точкам и приведение объекта в исходное состояние после диагностирования.
6. Коэффициент избыточности системы:
 (2.12)
(2.12)
где  - объём составных частей, введённых для
диагностирования системы;
- объём составных частей, введённых для
диагностирования системы;
 - масса или объём системы.
- масса или объём системы.
7. Коэффициент унификации устройств сопряжения и системы со
средствами диагностирования:
 (2.13)
(2.13)
где  - число унифицированных устройств сопряжения.
- число унифицированных устройств сопряжения.
 - общее число
устройств сопряжения.
- общее число
устройств сопряжения.
8. Коэффициент унификации параметров сигналов системы:
 (2.14)
(2.14)
где  - число унифицированных параметров сигналов системы,
используемых при диагностировании;
- число унифицированных параметров сигналов системы,
используемых при диагностировании;
 - общее число параметров сигналов, используемых при
диагностировании.
- общее число параметров сигналов, используемых при
диагностировании.
9. Коэффициент трудоёмкости подготовки системы к диагностированию:
 (2.15)
(2.15)
где  - средняя оперативная трудоёмкость диагностирования системы;
- средняя оперативная трудоёмкость диагностирования системы;
 - средняя трудоёмкость подготовки системы к диагностированию.
- средняя трудоёмкость подготовки системы к диагностированию.
10. Коэффициент использования специальных средств
диагностирования:
 (2.16)
(2.16)
где  – суммарная масса или
объём серийных и специальных средств диагностирования;
– суммарная масса или
объём серийных и специальных средств диагностирования;
 – масса или объём специальных средств
диагностирования.
– масса или объём специальных средств
диагностирования.
11. Уровень контролепригодности при оценке:
дифференциальной:  (2.17)
(2.17)
где  - значение показателя
контролепригодности оцениваемого системы;
- значение показателя
контролепригодности оцениваемого системы;  - значение
базового показателя контролепригодности.
- значение
базового показателя контролепригодности.
Комплексной  , (2.18)
, (2.18)
где  - число
показателей контролепригодности, по
совокупности которых оценивают уровень контролепригодности;
- число
показателей контролепригодности, по
совокупности которых оценивают уровень контролепригодности;
 - коэффициент
весомости -го показателя контролепригодности.
- коэффициент
весомости -го показателя контролепригодности.
3. ЭЛЕМЕНТЫ ЦИФРОВЫХ СИСТЕМ И ПРОБЛЕМЫ ПОВЫШЕНИЯ ИХ НАДЕЖНОСТИ
3.1. Цифровые
системы, основные критерии их надежности
Основной задачей современных цифровых систем является
повышение эффективности и качества передачи информации. Решение этой задачи
развивается в двух направлениях: с одной стороны, совершенствуются методы передачи
и приёма дискретных сообщений для увеличения скорости и достоверности передаваемой
информации при ограничении затрат, с другой стороны, разрабатываются новые
методы построения цифровых систем, обеспечивающие высокую надежность их работы [1,3,21,52]
Такой подход требует разработки цифровых
систем, реализующих сложные алгоритмы
управления в условиях случайных воздействий с необходимостью адаптации [1,3,52] и обладающих свойством
отказоустойчивости [1,52].
Применение для этих целей БИС, СБИС и МПК
позволяет обеспечить высокую эффективность каналов передачи информации и
способность в случае отказа быстро восстановить нормальное
функционирование цифровых систем.
В дальнейшем под современной цифровой
системой будем понимать такую систему,
которая строится на основе БИС, СБИС и МПК.
Структурная схема цифровой системы
приведена на рис.3.1. Передающая часть цифровой системы осуществляет ряд преобразований дискретного
сообщения  в сигнал
в сигнал  . Совокупность операций, связанных с преобразованием
передаваемых сообщений в сигнал, называется способом передачи, который можно
описать операторным соотношением [51]
. Совокупность операций, связанных с преобразованием
передаваемых сообщений в сигнал, называется способом передачи, который можно
описать операторным соотношением [51]
 (3.1)
(3.1)
где  - оператор способа передачи;
- оператор способа передачи;
 - оператор
кодирования;
- оператор
кодирования;
 - оператор модуляции;
- оператор модуляции;
 - случайный процесс возникновения сбоев и отказов в передатчике.
- случайный процесс возникновения сбоев и отказов в передатчике.
Появление сбоев и отказов в передатчике приводит
к нарушению условия →←
и увеличению числа ошибок в
цифровой системе. Вследствие этого необходимо таким образом проектировать
передатчик, чтобы увеличение числа ошибок за счет нарушения условия →←
было достаточно малым.
Сигналы, передаваемые в среде
распространения, претерпевают в ней ослабление
и искажения. Поэтому сигналы  , приходящие в пункт приема могут существенно
отличаться от передаваемых передатчиком.
, приходящие в пункт приема могут существенно
отличаться от передаваемых передатчиком.
Рис 3.1.
Структурная схема цифровой системы
Влияние среды на распространяемые в ней
сигналы можно также описать
операторным соотношением [51]
 (3.2)
(3.2)
где  - оператор среды
распространения.
- оператор среды
распространения.
В канале связи на передаваемый сигнал накладываются помехи,
так что при передаче сигнала на входе
приёмника действует искаженный сигнал:
 , (3.3)
, (3.3)
где  - случайный процесс,
соответствующий одной из помех;
- случайный процесс,
соответствующий одной из помех;
 - число независимых источников помех.
- число независимых источников помех.
Задача приемника состоит в том, чтобы по принятому искаженному сигналу  определить какое
сообщение передавалось. Совокупность операций приемника можно описать
операторным соотношением [51]:
определить какое
сообщение передавалось. Совокупность операций приемника можно описать
операторным соотношением [51]:
 (3.4)
(3.4)
где  – оператор способа приема;
– оператор способа приема;
 - оператор
демодуляции;
- оператор
демодуляции;
 - оператор
декодирования;
- оператор
декодирования;
 - случайный процесс возникновения отказов и сбоев в приемнике.
- случайный процесс возникновения отказов и сбоев в приемнике.
Полнота соответствия  переданной последовательности
переданной последовательности  зависит не только от
корректирующих возможностей кодированной последовательности
зависит не только от
корректирующих возможностей кодированной последовательности  , уровня сигнала и помех и их
статистики, свойств декодирующих устройств, но и от способности цифровой
системы корректировать ошибки, вызванные аппаратурными сбоями и отказами
передатчика и приемника
, уровня сигнала и помех и их
статистики, свойств декодирующих устройств, но и от способности цифровой
системы корректировать ошибки, вызванные аппаратурными сбоями и отказами
передатчика и приемника  и [52]. Рассмотренный подход позволяет
описать процесс передачи информации математической моделью, что дает
возможность выявить влияние различных факторов на эффективность цифровых
систем и наметить пути повышения их надежности.
и [52]. Рассмотренный подход позволяет
описать процесс передачи информации математической моделью, что дает
возможность выявить влияние различных факторов на эффективность цифровых
систем и наметить пути повышения их надежности.
Известно, что все цифровые системы бывают
невосстанавливаемые и восстанавливаемые. Основным
критерием надежности невосстанавливаемой цифровой системы является вероятность
безотказной работы [1,9,21]:
 (3.5)
(3.5)
это
вероятность того, что за заданный отрезок времени t не произойдет отказа;
где - 
λ – интенсивность отказа;
- число элементов в цифровой системе;
 - интенсивность
отказа одного элемента цифровой системы.
- интенсивность
отказа одного элемента цифровой системы.
Основным
критерием надежности восстанавливаемой цифровых систем является коэффициент готовности [1,9,21]
 , (3.6)
, (3.6)
который
характеризует вероятность того, что
система будет находиться в исправном состоянии в произвольно выбранный момент
времени;
где  - средняя
наработка на отказ;
- средняя
наработка на отказ;
Это среднее значение длительности непрерывной работы
системы между двумя отказами.
 , (3.7)
, (3.7)
где N- общее число
отказов;
 -время работы между (
-время работы между ( ) и
) и  отказом.
отказом.
 .
.
 - время восстановления. Среднее время простоя системы,
вызванное отысканием и устранением отказа.
- время восстановления. Среднее время простоя системы,
вызванное отысканием и устранением отказа.
 , (3.8)
, (3.8)
где  - длительность
- длительность  отказа.
отказа.

где  - интенсивность
восстановления, характеризует число восстановлений в единицу времени.
- интенсивность
восстановления, характеризует число восстановлений в единицу времени.
3.2. Пути повышения надежности цифровых систем
Современные цифровые системы,
представляют собой сложные территориально распределённые технические комплексы,
выполняющие важные задачи по своевременной и качественной передаче информации
[1,3,21,52].
Техническое обслуживание и обеспечение необходимых ремонтно-восстановительных работ
для сложных цифровых
систем является важной проблемой.
При выборе цифровых систем
необходимо убедится, что их производители готовы осуществить техническую
поддержку в течении не только гарантийного, но и всего срока службы, т.е. до
наступления предельного состояния. Таким образом, при принятии решения о
приобретении цифровых систем операторам
необходимо учитывать долговременные затраты на ее техническое обслуживание и
ремонт.
Необходимо отметить, что качество предлагаемых услуг, а также размеры
затрат, которые несёт операторская компания в своей деятельности, в
значительной степени зависит от подготовки и организации процесса технического
обслуживания и ремонта цифровых систем.
Поэтому задача совершенствования методов технического обслуживания и ремонта,
территориально распределённых цифровых систем
приобретает всё большую актуальность.
Известно, что требования международных стандартов в области качества
обязывают оператора связи как поставщика услуг включать в область системы
качества – техническое обслуживание и ремонт
цифровых систем.
Как
показывает международный опыт развитых стран, в которых уже пройдён период
массовой цифровизации сети телекоммуникаций и внедрения принципиально новых
услуг, эффективно эта задача решается созданием развитой инфраструктуры
организационно-технической поддержки, включающей в себя также систему сервис центров
и центры ремонта [1,5,21,52].
Поэтому поставщики цифровых систем
должны организовать центры сервисного обслуживания для осуществления
гарантийного и послегарантийного обслуживания своего оборудования, текущей её
эксплуатации и ремонта.
Обычно структура системы сервис центров включает в себя:
-
главный
сервис центр, координирующий работу всех остальных сервис центров и имеющий
возможность выполнять наиболее сложные виды работ;
-
региональные
сервис центры;
-
службы
технического сервиса оператора связи.
Однако, как показывает практика, наряду с высоким
качеством поставляемого оборудования и его
широкими функциональными возможностями возникает и ряд проблем:
-
недостаточное развитие
(а в ряде случаев отсутствие) сети сервисного обслуживания поставляемых цифровых систем;
-
поставщиков цифровых систем больше, чем сервис центров;
-
высокая стоимость
ремонта цифровых систем .
В этой связи к поставщикам необходимо предъявлять
соответствующие требования по организации технического обслуживания
поставляемого оборудования и срокам замены неисправных узлов цифровых систем.
Так как уровень удобства функций
технического обслуживания цифровых систем
варьируется от системы к системе, то и работа с различными системами требует
разной степени подготовки обслуживающего персонала. Как показывает практика,
по-разному строят фирмы поставщики телекоммуникационного оборудования и свою
стратегию организации сервисной поддержки:
-
создание главного
сервис центра технической поддержки;
-
создание развитой
сети региональных центров поддержки;
-
поддержка через
сеть дистрибьюторов и своё представительство;
-
поддержка силами
дилерской сети.
В настоящее время существует большое разнообразие
форм, методов и видов технического обслуживания. Услуги заказчикам
предоставляются в четырёх различных формах:
-
самообслуживание
силами самих заказчиков;
-
обслуживание на
месте эксплуатации оборудования;
-
обслуживание в
центрах, производящих не ремонт, а
замену;
-
обслуживание в
центрах ремонта.
Необходимо
особо отметить, что в настоящее время не существует единой концепции сервисного
обслуживания.
1. Одни операторские компании придерживаются мнения, что главной
задачей является ускорение ремонта, что достигается заменой плат и даже блоков,
которые затем проходят полный цикл контроля и восстановления их работоспособности
в центрах ремонта, оснащённых комплектом современного диагностического
оборудования.
2. Другие операторские компании предпочитают
переходить к ремонту на уровне элементов, для локализации неисправностей которых
они используют новейшие диагностические
средства высокой функциональной сложности.
Поэтому неотъемлемой составной частью систем технического
обслуживания и ремонта как системы управления состоянием цифровых систем является система технического
диагностирования. В настоящее время общепризнанно, что одним из важных путей
повышения эксплуатационной надёжности и в конечном счёте качества
функционирования цифровых систем является
создание эффективной системы технического диагностирования.
Поэтому решение задач технического обслуживания и
ремонта предполагает использование соответствующей системы технической
диагностики цифровых систем на этапе их
эксплуатации, которая должна обеспечивать двухступенчатую стратегию поиска
неисправностей в цифровых системах с глубиной
поиска соответственно до типового элемента замены (ТЭЗа), платы и микросхемы. С
учётом расширения номенклатуры цифровых систем
возникает необходимость в снижении требований к квалификации обслуживающего
персонала систем технического диагностирования, особенно для центров сервисного
обслуживания и ремонта. Диагностическая аппаратура, предназначенная для этих
центров должна иметь по возможности минимальные массогабаритные показатели и
обеспечивать учёт специфики каждого объекта диагностирования.
В настоящее
время известны следующие основные направления работ по повышению надежности
функционирования цифровых систем:
1. В первую очередь
надежность повышается за счет использования высоконадежных компонентов. Это
направление сопряжено со значительными затратами средств и обеспечивает лишь
решение задачи безотказности, но не ремонтопригодности. Односторонняя
ориентация при создании систем на достижение высокой безотказности (за счет
использования более совершенной элементной базы и узлов) в ущерб
ремонтопригодности, во многих случаях не приводит, в конечном счете, к
повышению коэффициента готовности в реальных условиях эксплуатации. Это связано
с тем, что даже высококвалифицированные специалисты с использованием традиционных
технических средств диагностики тратят на поиск и локализацию неисправностей в
сложных современных цифровых системах до 70-80% активного времени ремонта.
2.
Вторым направлением повышения надежности является дублирование или резервирование
технических средств и каналов связи. Это направление требует вложения больших
экономических и трудовых затрат, что в конечном итоге ведет в ряде случаев к
неоправданному расточительству, кроме того, в этом случае должна быть
обеспечена повышенная надежность самих переключающих устройств.
3. Это направление связано с
улучшением эксплуатационных и технических характеристик, путем улучшения
показателей ремонтопригодности средствами технической диагностики. Необходимо
отметить, что в существующих цифровых системах
отсутствуют средства, которые позволили бы оперативно осуществлять
селектирование канальных ошибок от ошибок, вызванных аппаратурными источниками
в передающей и приемной частях (модемах, кодеках, устройствах синхронизации и
т.д.). В таких цифровых
системах обнаружение факта отказа, поиск и локализация аппаратурных
источников неисправностей производится в режиме «Авария связи». Кроме того,
большинство существующих средств контроля и диагностики практически применимы в
ремонтно-профилактических режимах, что приводит к большому
пространственно-временному разрыву между возникновением и обнаружением
неисправностей. Последнее, в конечном итоге, приводит к значительным
экономическим и временным затратам на поиск и локализацию местоположения
источника и причины неисправностей.
В этой связи, в целях улучшения показателей
ремонтопригодности, необходимо предусмотреть специальные меры для оперативного
обнаружения факта появления ошибок из-за аппаратурных источников, поиска и
локализации, как места появления сбоев и отказов в блоках цифровых систем (модемах, кодеках, устройствах
синхронизации и т.д.), так и неисправностей в функциональной схеме неисправного
узла.
С
целью поддержания цифровых систем в технически исправном состоянии
создается подсистема контроля и диагностики, которая представляет собой
совокупность программных и аппаратных средств, предназначенных для
диагностирования их технического состояния и поддержания (или восстановления)
необходимого качественного уровня работы. Средства контроля и диагностики цифровых систем
позволяют ускорить сложные процессы обнаружения и устранения отказов, уменьшить
время простоя оборудования.
К элементам цифровых
систем относятся оконечная аппаратура, каналообразующая аппаратура,
коммутационные системы, и т.д.[1,5]
На рис. 3.2. показана структурная схема элемента цифровой системы передачи информации, где приведены
контрольные точки. Устройство управления и контроля, наряду с основными
устройствами преобразования сигналов (УПС) и защиты от ошибок (УЗО), также
контролирует детектор качества сигналов (ДКС), устройство сопряжения (УС) и оконечное оборудование данных (ООД).
Контроль цифровых систем позволяет выявить
Рис.3.2.
Структурная схема элемента цифровой
системы передачи
информации
неисправные
узлы, снижает количество аппаратурных ошибок, сокращает время простоя
терминальных устройств.
Одной из основных задач является оценка состояний
качества дискретных каналов, которые классифицируются как работоспособное и
неработоспособное состояние.
Известно, что качество дискретных каналов оценивается
качеством передачи информации по каналам [1,5]:
-
методом оценки
через вторичные статистические характеристики сигналов (искажений элементов,
сигналов стирания ошибок);
-
методом оценки
через параметры сигналов;
-
методом оценки
через параметры помех.
Результаты этих оценок используются как для
диагностики технического состояния канала передачи данных, так и для повышения
верности принимаемой последовательности сигналов.
Подсистема технической диагностики состоит из
аппаратных и программных средств, обеспечивающих оценку информативных
диагностических признаков, позволяющих путем обработки диагностической
информации с заданной вероятностью, и глубиной
диагностировать технические состояния цифровых
систем.
3.3. Анализ
стратегии диагностики и восстановления работоспособности цифровых систем
Как отмечалось ранее, при построении современных цифровых систем актуальной задачей является исследование методов
повышения качества функционирования технических средств и каналов связи.
Трудность решения этой задачи состоит в том, что непрерывное увеличение
сложности современных цифровых систем вызывает
значительные трудности в достоверной оценке технического состояния в целом и
его составных частей в эксплуатационных условиях [1,3,24].
Как указывалось ранее в целях улучшения
показателей технического обслуживания и ремонта необходимо предусмотреть
специальные меры для оперативного обнаружения факта появления ошибок из-за
аппаратурных источников, поиска и локализации как места появления сбоев и
отказов в блоках цифровых систем, так и
неисправностей в функциональной схеме неисправного узла.
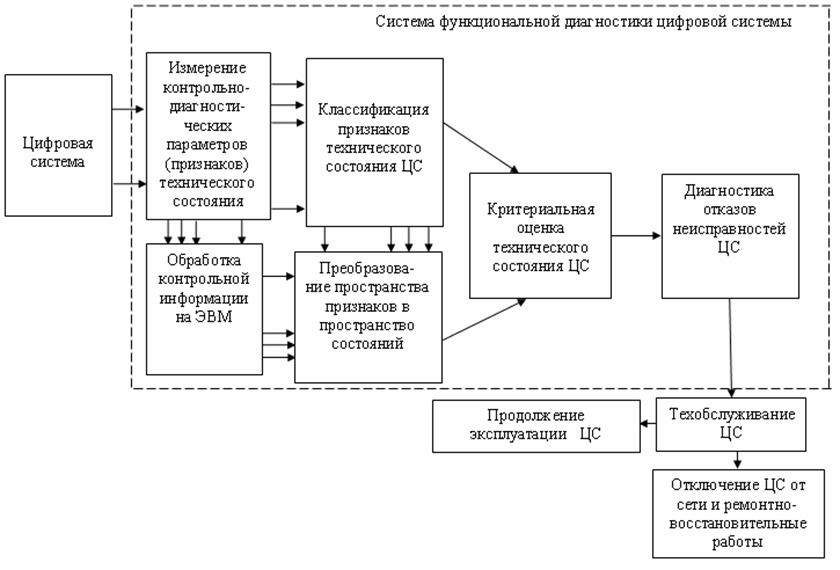
Основные задачи процесса технической
диагностики цифровых
систем приведены на рис. 3.3.
Рис.3.3. Основные
задачи процесса технической диагностики
цифровых систем
В [1,3] показано, что цифровая система имеет множество
технических состояний, которые можно рассматривать как совокупность
подверженных изменению в процессе эксплуатации свойств объекта,
характеризующихся в определенный момент времени соответствующими признаками.
Каждое техническое состояние цифровых систем
 , (3.9)
, (3.9)
является
некоторой функцией работоспособности в пространстве параметров
состояния
(относящихся к классу состояний Сi)
 . (3.10)
. (3.10)
Информацию о текущем состоянии системы получают путем
измерения выходных сигналов уj в
выбранных контрольных точках.
Основная
задача диагностики
- определение
класса состояний Ci в текущий момент
времени - осуществляется по решающему
правилу
 (3.11)
(3.11)
где
р(y,  ) – мера сходства
сравниваемых векторов.
) – мера сходства
сравниваемых векторов.
Как показано
в [1,3] для простейшей математической модели, приемник цифровой системы
с диагностикой ошибок и отказов может находиться в случайный момент времени в
одном из следующих возможных состояниях:
с0 -приёмник функционирует без ошибок и отказов;
с1 -приём осуществляется с необнаруженной
ошибкой;
с2 -приёмник
исправляет обнаруженную ошибку;
с3 -приёмник
неработоспособен из-за отказов (рис. 3.4)
Матрица условных вероятностей переходов рij из
состояния сi в
состояние сj
имеет вид [1,3]

 , (3.12)
, (3.12)
где приняты следующие обозначения:
 - интенсивность потока отказов;
- интенсивность потока отказов;
- интенсивность потока ошибок;
q –
вероятность необнаруженной ошибки устройством защиты от
ошибок (УЗО);
 - интенсивность
восстановлений отказов;
- интенсивность
восстановлений отказов;
 -интенсивность
исправления ошибок.
-интенсивность
исправления ошибок.
Для
случая простейших потоков ошибок и отказов получено:




вход
Рис.
3.4. Модель приемника цифровой системы с распознаванием и
диагностикой отказов
Система уравнений для оценки состояний рассматриваемой
цифровой системы имеет вид:




В целом восстановление
работоспособности цифровой системы при
появлении ошибок и отказов сводится к следующему:
- определение (выявление) нарушений
работоспособности цифровой
системы;
- диагностика блока цифровой системы
с отказами;
- локализация неисправного элемента
блока;
- восстановление работоспособности цифровой системы (замена или
ремонт неисправного элемента);
- восстановление потерянной
информации из-за отказов.
4. МЕТОДЫ КОНТРОЛЯ И ДИАГНОСТИКИ ЦИФРОВЫХ СИСТЕМ
4.1. Особенности
современных цифровых систем как объекта контроля и диагностики
Появление цифровых систем на микропроцессорной базе, в сочетании со
специализированными БИС, СБИС и МПК привело к серьезной проблеме обеспечения
эффективного обслуживания в местах их эксплуатации. Большинство специалистов,
занимающихся обслуживанием сложных
цифровых систем достаточно ясно осознало, что к проблеме контроля и диагностики
в условиях эксплуатации нельзя относится как к вопросу второстепенной важности.
Поэтому повышение технических и эксплуатационных характеристик сложных
цифровых систем на базе БИС, СБИС и МПК неразрывно связано с разработкой новых
методов и средств диагностики с необходимостью всестороннего учета и анализа
цифровых плат и их составных частей, как объекта контроля и диагностики.
Особенности контроля и диагностики цифровых плат с БИС
и СБИС характеризуется следующим [1,24,53]:
- широким
диапазоном характеристик БИС и СБИС;
- количеством
контрольных тестов, которое может достигать
несколько тысяч;
- цифровые платы с БИС и СБИС имеют
магистральный принцип
организации, что требует обеспечения обмена данными по 4, 8, 16 -
разрядным шинам за один период тактовой частоты, а
также
одновременный
многоканальный контроль;
- магистральные
шины в большинстве БИС и СБИС имеют
двунаправленный режим работы,
поэтому контрольное
оборудование должно обеспечивать переключение
с передачи на
приём в
течение одного периода тактовой частоты;
- цифровые платы с БИС и СБИС могут иметь в интерфейсных
схемах
несколько двунаправленных каналов ввода-вывода;
- так как
временные характеристики играют важную роль, то операции
контроля должны производится на частоте, близкой к рабочей
частоте до 10 –
20 МГц.
Микропроцессорные системы (МПС) также имеют ряд
особенностей, которые не позволяют использовать традиционное оборудование:
- описание схем затруднено, так как их функции, в MПС реализуются
микропрограммами,
хранящимися в ПЗУ. Работа этих схем скрыта в
алгоритме
программы;
- аналогичные трудности возникают в связи с
динамичностью работы
MПС, в
которых импульсные сигналы обычно действуют в течение
нескольких
микросекунд, а затем исчезают. Поэтому нужно знать, не
только
где смотреть, но и когда смотреть;
- параллельная структура шин, к которым подключено
сразу несколько
устройств
по схеме ИЛИ затрудняет обнаружение источника
неисправностей.
Таким образом,
можно указать на общие особенности цифровых плат на базе БИС, СБИС и МПК,
определяющих сложность их контроля:
- повышенная сложность объекта контроля;
- ограниченный допуск к контролируемым узлам;
- шинная организация;
- необходимость контроля в реальном масштабе времени;
- микропрограммное управление МП;
- неполнота контроля комплектующих БИС и СБИС;
- влияние на устойчивость
функционирования МПС входных
проводимостей БИС, СБИС и элементов конструкции;
- высокая стоимость обнаружения и устранения дефектов
и др.
На основании вышеизложенного можно отметить, что в
условиях эксплуатации цифровых систем требуется решение следующих задач
контроля и диагностики:
1. Снижение себестоимости контрольно-диагностических
работ с
целью минимизации
себестоимости ремонтно-восстановительных
работ.
2. Сбор и обработка информации об эксплуатационной
надежности
цифровых
плат и их составных частей, а также о временных и
экономических
затратах на поиск и устранение неисправностей.
С
целью разработки автоматизированного устройства диагностики цифровых плат
(АУДЦП) и создания базы диагностических данных должны быть разработаны:
-
методика анализа
номенклатуры и технических данных заданных типов
цифровых плат
как объекта контроля и диагностики для средств
диагностики на
основе метода сигнатурного анализа;
-
методика анализа
статистических данных подконтрольной
эксплуатации цифровых
систем для определения надежностных
характеристик
цифровых плат.
По первому направлению необходимо проведение анализа
номенклатуры и технических данных цифровых плат и их составных частей, который
включает в себя:
1. Распределение числа различных по функциональному
назначению
цифровых
плат в цифровой системе;
2. Число типонаименований цифровых плат и их размеры:
типы, серии и
число
ИМС, БИС, СБИС и МПК;
3. Типы и число разъёмов, число контактов разъёмов в
различных типах
цифровых
плат;
4. Рабочие частоты функционирования узлов в
рассматриваемых
цифровых платах;
5. Градации напряжения источников питания для
различных цифровых
плат
с ИМС, БИС, СБИС и МПК.
По второму направлению необходимо проведение анализа
существующей подсистемы ремонтно-восстановительных работ (РВР), связанных с
цифровыми платами:
1. Общая организация, способы и средства контроля и
диагностики,
используемые
при РВР;
2. Временные и стоимостные затраты на проведение
контрольно-
диагностических
операций для заданных цифровых плат и ремонтно-
восстановительных
работ (РВР) в целом;
3. Анализ надёжностных характеристик цифровых плат и их
составных частей
по результатам обобщенного опыта
эксплуатации.
С целью
определения основных количественных показателей эксплуатационной надёжности
цифровых плат, учёт которых позволит снизить реальные трудозатраты на
проведение контрольно-диагностических операций, необходимо проведение анализа:
а)
интенсивности отказов цифровых плат;
б) доли отказов
отдельных цифровых плат в общем, количестве
отказов аппаратуры;
в) среднего
времени поиска неисправности;
г) наработки
на отказ и среднего времени восстановления цифровых
плат;
д) ранжирования цифровых плат по критерию
эксплуатационной
надежности.
Таким образом, в создаваемой базе диагностических
данных АУДЦП предусматривается хранение:
-
сведений о типах
ИМС, БИС,СБИС и МПК и их эталонных сигнатурах, необходимых при их замене и для
организации входного контроля;
-
сведений о
проверяемых цифровых платах и их эталонных сигнатурах непосредственно на
контактах разъёмов;
-
сведений о
топологический модели схемы цифровых плат;
-
алгоритмов для
поиска и локализации места неисправности в цифровых платах;
-
сведений о
внешних стыковочных параметрах, необходимых при настройке и проверке работоспособности восстановленных цифровых плат и доведения
этих параметров до норм указанных в технических условиях.
Для повышения эффективности средств контроля и
диагностики, пользователю АУДЦП необходимо предоставить на выбор один из ниже
следующих режимов:
-
режим словаря
(«журнал») эталонных сигнатур, для заданных
типов цифровых плат. Подобный словарь эталонных сигнатур цифровых плат
даёт возможность контролировать по ним состояние цифровой схемы в произвольном
порядке, отыскивая неправильные или нестабильные сигнатуры;
-
режим обратного
прослеживания ошибок по заданному алгоритму поиска неисправности в цифровой
плате. В этом режиме оператор получает указания по последовательному контролю
набора точек, что позволяет оператору с зондом, начиная с неправильной сигнатуры,
определить всю цепочку сигнатур, ведущую к неисправному элементу или узлу схемы
с точностью, которая обеспечивает методы сигнатурного анализа.
При этом в АУДЦП по окончании
контрольно-диагностических процедур должно обеспечиваться автоматическое документирование
и хранение результатов:
-
даты и времени
проявления неисправности;
-
режим работы цифровой
системы в момент появления неисправности;
-
метода и
средства, применяемого для поиска и локализации места неисправности;
-
места и причины
неисправности;
-
временных
характеристик обнаружения, поиска и локализации места неисправности;
-
оператора
производившего диагностику неисправности.
4.2. Анализ моделей неисправности цифровых устройств
Основным состоянием цифрового устройства является
исправное – такое состояние устройства, при котором оно удовлетворяет всем
требованиям технической документации. В
противном случае устройство находится в одном их неисправных состояний.
Если установлено, что цифровое устройство неисправно,
то решается вторая задача: осуществляется поиск неисправности схемы, цель
которого – определение места и вида неисправности.
Неисправности цифрового устройства появляются в
результате применения неисправных компонентов, возникновения разрывов или
коротких замыканий в межкомпонентных соединениях, нарушение условий
эксплуатации схемы, наличие ошибок при проектировании и производстве, а также
ряд других факторов.
Для научно обоснованного выбора методов и средств
диагностики необходимо тщательное изучение и анализ неисправностей цифровых устройств,
а также определение к какому классу они относятся. При этом метод диагностики
будет адекватен цифровому устройству, для которого он используется, именно в
той мере, в какой адекватно принятая за основу модель неисправности.
В большинстве случаев рассматриваются следующие виды
неисправностей:
1. Константные неисправности:
константный нуль и константная единица, что означает наличие постоянного уровня
логического нуля или логической единицы на входах и выходе неисправного
логического элемента.
3.
Неисправности
типа «короткое замыкание» (мостиковые неисправности) появляются при коротком
замыкании входов и выходов логических элементов и подразделяются на два вида:
неисправности, вызванные коротким замыканием входов логического элемента, и
неисправности типа обратной связи.
4.
Инверсные
неисправности описывают физические дефекты цифровых схем, приводящие к
появлению фиктивного инвертора по входу или выходу логического элемента,
входящего в данную схему.
5.
Неисправности
типа «перепутывание» заключаются в перепутывании связей цифровой схемы и
вызываются ошибками, возникающими при проектировании и производстве цифровых
схем, которые изменяют функции, выполняемые схемой.
На рисунке 4.1. приведен жизненный
цикл цифровых систем в период, их технической эксплуатации который, можно
характеризовать через  - интенсивность отказа[1,3,52,55]:
- интенсивность отказа[1,3,52,55]:
Рис.4.1. Три
этапа технической эксплуатации цифровых систем
На кривой можно выделить три характерные области:
I.
предэкслуатационная
тренировка и испытания.
II.
нормальная
эксплуатация.
III.
старение, износ и
утилизация.
В первый период предэксплуатационных испытаний выявляются в основном
большинство производственных дефектов и неисправностей. Они составляют до 70 –
80% отказов системы в целом.
Во второй период система
проходит нормальную эксплуатацию, поэтому
наблюдаются отказы и неисправности с минимальной интенсивностью - .
В третьем периоде резко возрастает в
виду деградационных процессов, и система нуждается в капитальном ремонте или в
утилизации.
Характер и вид отказов в эти три
периода технической эксплуатации систем в основном разнотипные: если в первый
период превалируют производственные ошибки, то в третьем – наблюдается резкое
отклонение численных значений основных параметров элементов, обусловленные
процессами деградации и устраняемые в определённой мере способом регулировок и
подстроек. Анализ причин и видов отказов в разные временные отрезки позволяет
активно вмешиваться в производственный процесс и минимизировать погрешности за
счет влияния человеческого фактора (проводить обучение техперсонала, снабдить
их прогрессивной контрольно - измерительной техникой и т.д.).
Известно,
что первоисточником нарушений нормальной работы объекта
или ухудшением тех или иных его характеристик являются физические
дефекты компонентов его элементов, а также связей между ними.
Согласно [1,37], неисправность как физическое явление называют дефектом, а
термин "неисправность" используется либо как название модели дефекта,
либо в смысле неисправного состояния объекта или его составных
частей.
Таким образом, под
дефектом понимают физическое явление в компонентах устройства, вызвавшее
переход в подмножество неисправных состояний. А неисправность -
это формализованное представление факта проявления дефекта в виде неправильных
значений сигналов на входах и выходах объекта. Термин "дефект"
связан с термином "неисправность", но не является его синонимом,
то есть неисправность - это определенное состояние объекта,
в котором оно может иметь один или несколько дефектов. В
зависимости от структуры устройство дефект может привести или не привести
к ошибке на внешних выходах объекта, а ошибка - это неправильные значения
сигналов на внешних выходах объекта, вызываемые неисправностями.
Интенсивность отказов отдельных
элементов цифровых систем имеет следующие пределы [7,55]:
Интенсивность отказов - · 10-6
И.С. – 0.1· 10-6
Диод – (0,2 –
0,5) ·10-6
Центральный процессор – 152·10-6
Транзистор – (0,05 – 0,30) ·10-6
Резистор – (0,01 – 0,1)1·0-6
Печатающее устройство – 420·10-6
Пайка – 0,0001·10-6
ОЗУ – 300·10-6
НМД – 250·10-6
НМЛ – 350·10-6
Разъёмы – (2,0 – 3,5) · 10-6
В зависимости от сложности и
трудоёмкости локализации дефектов время его обнаружения колеблется в широких
пределах.
Наличие дефектов значительно увеличивает стоимость
производства, ухудшает качество и надежность функционирования схемы.
Распределение дефектов по разным этапам
технологического процесса следующее:
1. Входной контроль изделий – 1,9 ÷3,2% .
2. Комплектование – 0,9 ÷ 1,2% .
3. Подготовка и формовка элементов – 0,8 ÷1,0% .
4. Сборка – 3 ÷ 4% .
5. Пайка – 5 ÷ 6% .
6. Межоперационные перемещения изделий – 0,4 ÷
0,6% .
В
целом до 20% печатных узлов содержат те или иные дефекты, которые необходимо
выявлять и исправлять.
Испытания показывают, что:
-
короткие
замыкания печатных проводников – 34%;
-
обрывы печатных
проводников – 27%;
-
неправильная
ориентация – 15%;
-
пропущенные и
ошибочно установленные элементы – 17%;
-
дефектные
элементы – 5%, а прочие дефекты - 2% .
Аналогичные данные по
английской технологии показывают, что:
-
поток годных печатных узлов – 67%, а 33% - дефектные.
Виды дефектов следующие:
-
короткие замыкания
– 50%;
-
отсутствие
элементов – 20%, а неверно установленные элементы – 10%;
-
неисправности
активные –10%, а пассивные – 10%.
Виды дефектов интегральной
микросхемы следующие:
-
поверхностные
дефекты ИС – 38,9%;
-
дефекты корпуса –
26%;
-
дефекты выводов –
10,3%;
-
дефекты
соединений – 5,2%;
-
дефекты
металлизации – 6,6%;
-
объёмные дефекты
в - 6,6%;
-
дефекты в окисле
– 6,4%.
В результате появления дефекта наблюдаются отказы или
сбои.
Отказ системы (устройства) - это полная или частичная утрата системой (устройством) работоспособности, на восстановление которой необходимо произвести ремонт (замена)
неисправного элемента, блока или устройства.
Таким образом, сложная система может иметь огромное
множество состояний, которые условно разделяются на работоспособные и
неисправны состояние.
Каждое состояние системы обычно задаётся
вероятностными параметрами или разрабатываются разной степени сложности
математические модели, степень адекватности которой реальному процессу иной раз
невозможно установить никакими измерениями. В неработоспособном состоянии
какие-то функциональные параметры системы выходят за пределы нормы. Поэтому при
помощи технической диагностики получается информация о техническом состоянии
системы (рис.4.2) с целью управления этим
состоянием и возвращением системы в работоспособное состояние.
Граф технического состояния системы выглядит следующим
образом.
Рис.4.2. Граф
технического состояния системы
Поэтому главные задачи технической эксплуатации
системы это: предотвращение появления отказов, произведение восстановления
системы при отказах, оценка состояния системы, продление состояния готовности
системы, своевременное произведение техобслуживание и т. д.
Вероятность пребывания системы в работоспособном
состоянии выражается через коэффициент:
 (4.1)
(4.1)
где
 – средняя наработка на отказ;
– средняя наработка на отказ;
 - среднее время
восстановления;
- среднее время
восстановления;
 – средняя
продолжительность техобслуживания.
– средняя
продолжительность техобслуживания.
Оптимальная
частота проведения профилактических работ зависит от наличия достаточного
количества опытных специалистов (их производительности
профилактических работ), от надёжности функционирования основных элементов
систем, от времени восстановления и т. д. При проведении профилактических работ
(регулировки, измерения множества параметров систем и т. д.) превалирует ручной
труд и поэтому персонал в результате ошибочных действий может внести в
действующие системы отдельные виды неисправностей и отказов.
Существуют
различные математические модели отказов, которые с разной степенью точности
описывают этот процесс [7,21,55].
В виду редкости появления событий в виде отказов
ординарный поток отказов во времени без последействия описываются законом
Пуассона:
 (4.2)
(4.2)
где – число появляющихся
отказов за отрезок времени  с интенсивностью -.
с интенсивностью -.
Вероятность отсутствия отказа за время равно:
 (4.3)
(4.3)
Время безотказной работы в случае
внезапных отказов элементов распределяется по экспоненциальному закону с
плотностью вероятности

где - интенсивность
внезапных отказов.
Распределения времени безотказной
работы по постепенным отказам:
 (4.4)
(4.4)
где –  среднее время
безотказной работы.
среднее время
безотказной работы.
Распределение времени безотказной
работы по двум видам системы:
 (4.5)
(4.5)
где  и
и  – нормирующие
коэффициенты.
– нормирующие
коэффициенты.
Время безотказной работы для некоторых
элементов подчиняется закону распределения Вейбулла:
 (4.6)
(4.6)
где  и
и  – параметры
распределения.
– параметры
распределения.
Для экспоненциального закона безотказной
работы среднее время безотказной работы равно: 
 (4.7)
(4.7)
Среднее время восстановления для
экспоненциального закона:
 ,
(4.8)
,
(4.8)
где - интенсивность восстановления системы.
Если отказы появляются в соответствии с
требованиями стационарности случайных процессов, то указанные модели могут
иметь место в определенной стадии эксплуатации.
В случаях множественных отказов или же
их группировании можно рассматривать поток пакетов отказов (ошибок, сбоев) во
времени, которые образуют также стационарный процесс.
4.3. Виды и методы
контроля и диагностики
Практическая
реализация путей повышения уровня контролепригодности
существующих и перспективных цифровых систем связана в первую
очередь с усовершенствованием как традиционных, так и разработкой
качественно новых методов и средств оценки технического состояния цифровых
устройств. В общем случае в процессе работы цифровые системы являются
источником возникновения различных процессов: электрических,
тепловых, электромагнитных и т.д, которые могут являться носителями существенной
диагностической информации о техническом состоянии. Рассмотрим
существующие методы контроля и диагностики, классификационная схема по наиболее
общим видам контроля приведена на рис.4.3.
Все электрические
методы контроля могут быть разделены на три основные группы:
параметрический, функциональный и тестовый (рис.4.4).
Параметрический контроль включает традиционный метод измерения параметров на
постоянном токе и временные параметры: напряжений, токов,
сопротивлений, частоты, скважности, фронтов, длительностей
импульсов, время задержки распространения сигнала, длительность
нарастания, длительность спада и др. [47,53].
Кроме того,
параметрическим измерениям подлежат токи утечки входных контактов,
взаимные проводимости выводов микросхем, коэффициенты усиления, а в ряде
случаев и параметры входных и выходных сигналов, получаемых
в процессе упрощения проверки логических узлов.
Параметрический
контроль электронных узлов используется при проверке
правильности установки элементов на платы, локализации неисправных
элементов, контроле входных и выходных плат в условиях производства
и эксплуатации. Известно три основных метода параметрического контроля
элементов, установленных на плату: метод функциональных проб, метод
двухполюсников, метод потенциального разделения [47,53]. Анализ показывает, что
использование первого и второго методов связано с выпаиванием электронных
элементов из схем, что в свою очередь может стать источником
отказов в электронном узле. В настоящее время широкое распространение получил
третий параметрический метод измерения без разрыва связей между элементами.
В отличие от
параметрического контроля, задача функционального контроля включает: проверку
исправности, поиск неисправности, локализацию
неисправности. Методы функционального контроля различаются по четырем основным
признакам: способу генерации входных воздействий, способу
генерации выходных реакций, способу сравнения выходных реакций
испытуемой системы с истинными, способу анализа и постановки
диагноза [47,53,54]. Последний включает четыре известных способа: замещение,
логический анализ, сигнатурный анализ и автоматическая диагностика. В
зависимости от масштаба времени, в котором производится
функциональный контроль, различают статический и динамический. Статический
функциональный контроль осуществляется при низкой скорости
протекания процесса, а динамический - осуществляется в реальном масштабе
времени при быстродействии близкой к максимальной. В соответствии с этим,
статический контроль обнаруживает относительно простые
неисправности, а динамический контроль позволяет выявить сложные динамические
неисправности.
В отличие от
функционального контроля, при котором используются только рабочие воздействия,
тестовый контроль отличается возможностью подачи на контролируемую схему
специальных тестовых воздействий. При использовании тестового метода возникает
задача синтеза контролирующих и диагностических тестов для заданного
класса неисправностей: константные неисправности, короткие замыкания, обрывы неисправности
элементов и т.д. Из чаще всего применяемых при тестовых методах ограничений
типа неисправностей, можно указать на неисправность "тождественный 0" и "тождественная 1". В качестве
тестовых методов, учитывающих и неучитывающих логику схемы используются: метод
таблиц истинности, метод булева дифференцирования, алгоритм Армстронга, метод
Х-кубов и метод Д-кубов [1,10]. Первые три метода используются для
обнаружения единичных неисправностей типа "тождественный 0" и "тождественная 1" в комбинационных
схемах, а также для частичной локализации неисправностей.
В [10] рассмотрены
вышеуказанные методы построения тестов:
а)
метод пересечения применим для объектов с однократными неисправностями и с
достаточно большим числом сменных элементов (до 150 и более и до 400 и более
связей между ними). Метод может быть использован при построении средств
диагностики для комбинационных схем с памятью;
б)
метод таблиц истинности может успешно применяться для класса комбинационных
схем, которые не слишком большие (8÷10 входов и 4-5 выходов) и имеют
число специфических неисправностей, не превышающих несколько сотен для
обнаружения и не более ста для локализации неисправностей;
в)
метод булева дифференцирования применяют для проверки комбинационных схем,
содержащих неисправности типа "тождественный 0" или
"тождественная 1";
г)
алгоритм Армстронга используется для обнаружения единичных неисправностей типа
"тождественный 0" и "тождественная 1" в комбинационных
схемах. Кроме того, этот метод пригоден и для частичной локализации
неисправностей;
д)
метод Х-кубов может применяться для обнаружения неисправностей, как в
комбинационных, так и в схемах с обратными связями;
е)
метод Д-кубов применяется как для проверки неисправностей типа
"тождественный 0" и "тождественная 1", так и для других
неисправностей.
Все рассмотренные
методы контроля и диагностики резко отличаются друг от друга по информативности,
полноте, глубине, достоверности и производительности контроля и трудоемкости
диагностики, требованиям к квалификации специалистов. Необходимо отметить, что
реализация наиболее информативных и высоко производительных методов сопряжена с
созданием сложных средств контроля и диагностики.
4.4. Встроенный
контроль цифровых систем
Объективной тенденцией развития современных цифровых
систем является расширение круга решаемых ими задач при одновременном повышении
требований к эффективности функционирования. Резкое увеличение количества
элементов в единице оборудования, усложнение схемных решений и
функциональных связей цифровых систем
приводит к значительным трудностям в оценке их технического состояния, обнаружении
неисправностей и выявлении их причин в
условиях эксплуатации. В результате
возрастают эксплуатационные затраты, связанные
с техническим обслуживанием и ремонтом цифровых систем.
В настоящее
время технологический процесс технического обслуживания и ремонта цифровых
систем не в полной мере соответствует современным требованиям их
эксплуатации. Это объясняется тем, что
для выполнения технологических операций по техническому обслуживанию и текущему
ремонту, цифровые системы не всегда укомплектованы специальными техническими
средствами.
Кроме того, используемая при техническом обслуживании
эксплуатационно-техническая документация не содержит рекомендаций по выполнению
технологических операций по текущему ремонту и диагностике отказавших
функциональных узлов (плат) цифровой системы, а
обслуживающий персонал не имеет достаточных знаний, опыта и навыков в
области эксплуатации современных цифровых систем, созданных на базе БИС, СБИС и микропроцессорных комплектов.
Одной из основных задач функционального
контроля в цифровых системах является
оперативное обнаружение отказов технических средств (ТС). Для решения этой
задачи необходимо контролировать состояние каждого ТС и сам процесс передачи и
обработки информации. Контроль процесса в целом является системным, в
большинстве случаев он оказывается более простым в реализации и достаточно
полным, его элементы включаются во все протоколы обмена. В существующих
протоколах передачи информации предусмотрен контроль верности информации,
благодаря которому обнаруживается возникновение любого технического отказа,
вызывающего нарушения процесса передачи и обработки информации.
Одним из недостатков контроля процесса в целом
является задержка с обнаружением отказа на интервале времени от момента
возникновения отказа до его обнаружения. С этой точки зрения определенные
преимущества имеет функциональный контроль состояния каждого ТС системы,
благодаря которому отказавшее ТС может быть заблокировано в момент
возникновения отказа. При этом отказ должен обнаруживаться и устраняться в
точке технологического процесса, наименее удаленной во времени и пространстве
от точки возникновения этого отказа. В более общем случае реальная система
функционального контроля фиксирует отказы лишь с некоторой вероятностью.
Отказы, не фиксируемые контролем, обнаруживаются с задержкой времени  , которая является в общем случае величиной случайной. В силу аддитивности эта задержка прибавляется к
времени восстановления:
, которая является в общем случае величиной случайной. В силу аддитивности эта задержка прибавляется к
времени восстановления:  ,
,
где  – случайное
время восстановления, исчисляемое от момента обнаружения отказа до момента
полного восстановления; – указанное выше случайное время задержки обнаружения отказа,
исчисляемое от момента, когда фактически произошел отказ, до момента его
обнаружения.
– случайное
время восстановления, исчисляемое от момента обнаружения отказа до момента
полного восстановления; – указанное выше случайное время задержки обнаружения отказа,
исчисляемое от момента, когда фактически произошел отказ, до момента его
обнаружения.
Поэтому за один из
показателей качества функционального контроля ТС принимается вероятность
оперативного (т. е. в момент возникновения или с заданной допустимой задержкой ) обнаружения отказа  .
.
Для обеспечения единой стратегии контроля и
диагностики цифровых систем целесообразно использование двух уровней: верхний
уровень – контроль и диагностика с точностью до ТЭЗа на базе встроенных средств
контроля, нижний уровень – диагностики неисправностей с помощью средств технической
диагностики до неисправного элемента в ТЭЗе.
В этой связи одним из эффективных решений проблемы
контроля цифровой системы представляется
использование принципа встроенного контроля, который заключается в том, что
цифровая система и ее составные части разрабатываются таким образом, чтобы
обеспечивалась возможность встроенного контроля без участия какого-либо
внешнего оборудования. Методы встроенного контроля можно иерархически
перераспределить между различными уровнями от составных частей до цифровой
системы в целом. Встроенный контроль позволяет производить проверку цифровой
системы в процессе выполнения основных функций и по существу повышает
эксплуатационную надежность системы, поскольку позволяет обнаруживать отказы
сразу же при их возникновении.
Встроенным средствам контроля присущи
следующие основные преимущества:
а) значительное
сокращение времени восстановления
работоспособности системы и, соответственно,
повышение общей
эксплуатационной готовности;
б) уменьшение
численности обслуживающего персонала,
обеспечивающего ремонтно-восстановительные
работы;
в) сокращение видов
ремонта и ЗИП за счет повышения достоверности
контроля.
Однако необходимо
учитывать, что средства встроенного оперативного контроля двояко влияют на характеристики
контролируемой системы: с одной стороны повышается достоверность контроля и
уменьшается время обнаружения неисправности, с другой стороны, возрастает объем
дополнительного оборудования, что в свою очередь приводит к снижению надежности
самой системы. Таким образом, встроенные средства оперативного
контроля, обеспечивая выигрыш в достоверности контроля, приводят к
определенному проигрышу в безотказности, контролируемой аппаратуры. В этой
связи поиск разумного оптимума между полнотой охвата встроенным
контролем системы и объемом средств встроенного контроля является актуальной
задачей. Учет влияния объема встроенного контроля на эксплуатационные
характеристики системы позволит оптимально перераспределять ресурсы между встроенными
и внешними средствами контроля и диагностики. Поэтому для
обоснованного выбора встроенного контроля необходимо проведение исследования
влияния объема средств встроенного контроля на такие характеристики,
как коэффициент готовности, вероятность обнаружения неисправности
и среднее время восстановления цифровой системы.
Существуют следующие параметры
эффективности системы встроенного контроля:
 – коэффициент готовности контролируемой системы с системой
– коэффициент готовности контролируемой системы с системой
встроенного;
 – вероятность обнаружения неисправности
контрольным
– вероятность обнаружения неисправности
контрольным
устройством;
 – прорыв в безотказности контролируемого устройства с системой
– прорыв в безотказности контролируемого устройства с системой
контроля;
 – выигрыш в достоверности при использовании встроенного
– выигрыш в достоверности при использовании встроенного
контроля;
– среднее время наработки на отказ контролируемой системы с
системой встроенного контроля;
 – среднее время восстановления контролируемой системы с
– среднее время восстановления контролируемой системы с
системой встроенного контроля.
Как
показано в [27,42] критерий оценки
эффективности функционирования системы контроля – это проигрыш в безотказности
контролируемого устройства с системой встроенного контроля. Он определяется по
следующей формуле.
 , (4.9)
, (4.9)
где  – вероятность безотказной работы исходной (не контролируемой)
схемы;
– вероятность безотказной работы исходной (не контролируемой)
схемы;
 – вероятность безотказной работы.
– вероятность безотказной работы.
В свою очередь вероятность безотказной
работы исходной схемы можно определить
как
 , (4.10)
, (4.10)
где – параметр потока отказов всего оборудования,
 – интенсивность
восстановления контролируемой системы
– интенсивность
восстановления контролируемой системы
Вероятность безотказной работы средства
контроля
 (4.11)
(4.11)
где  и
и  при которых контролирующая
система считается исправной.
при которых контролирующая
система считается исправной.
Общее выражение проигрыша в безотказности
контролируемой системы со средством встроенного контроля

Выигрыш в достоверности при использовании встроенной
системы контроля определяется согласно как [27,42]
 , (4.13)
, (4.13)
где
 - достоверность функционирования контролируемого и
контрольного устройства в процессе проверки, которая вычисляется по формуле
- достоверность функционирования контролируемого и
контрольного устройства в процессе проверки, которая вычисляется по формуле
 . (4.14)
. (4.14)
Подставив
данное выражение в формулу получим
 . (4.15)
. (4.15)
Графики зависимости ∆Р и ∆D от δ при различных значениях вероятности
обнаружения неисправности Робн и вероятности безотказной работы
исходной системы Рисх приведены на рис 4.5 , 4.6 , 4.7
, 4.8 .
Рис 4.5. График зависимостей  и
и  при
при  и
и
различных
значениях вероятности безотказной работы
исходной
схемы 
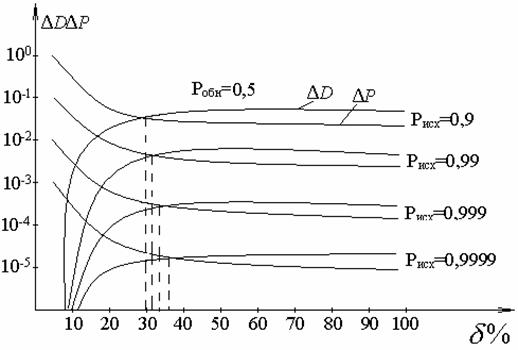
Рис.4.6. График зависимостей и при  и
и
различных
размерах вероятности безотказной работы
исходной
схемы
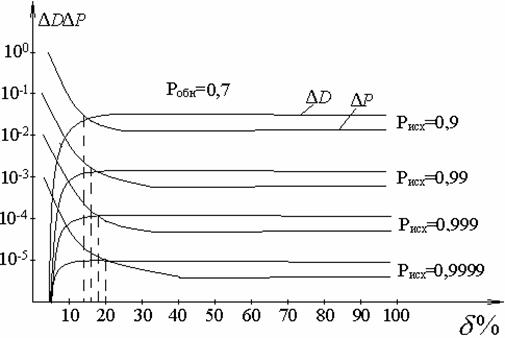
Рис. 4.7. График зависимостей и при и
и
различных
значениях вероятности безотказной работы
исходной
схемы
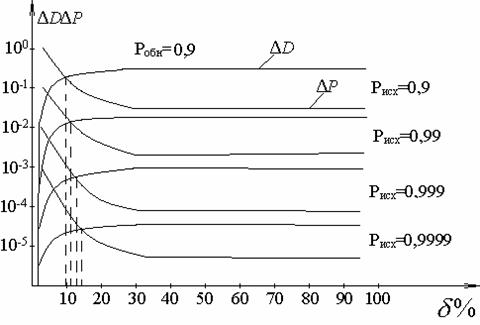
Рис. 4.8. График зависимостей и при и
и
различных значениях вероятности безотказной работы
исходной
схемы
На основании графиков приведенных на рис. 4.85, 4.6,
4.7, 4.8 можно получить зависимость оптимальной величины объема встроенного
контроля цифровой системы в зависимости от вероятности обнаружения
неисправности  при различных значениях вероятности безотказной работы
исходной схемы Эта зависимость приведена в таблице 4.1, а график
зависимостей по результатам данной таблицы приведен на рис. 4.9.
при различных значениях вероятности безотказной работы
исходной схемы Эта зависимость приведена в таблице 4.1, а график
зависимостей по результатам данной таблицы приведен на рис. 4.9.
Таблица 4.1.
Зависимость  оптимального от при различных
значениях вероятности безотказной работы исходной схемы
оптимального от при различных
значениях вероятности безотказной работы исходной схемы
|

|

|
|

|

|

|

|
|
20
30
40
50
60
70
80
90
100
|
81
59
45
30
22
16
13
10
|
82
64
48
32
23
17
15
11
|
84
66
52
33
24
18
16
12
|
86
68
54
34
25
20
17
13
|
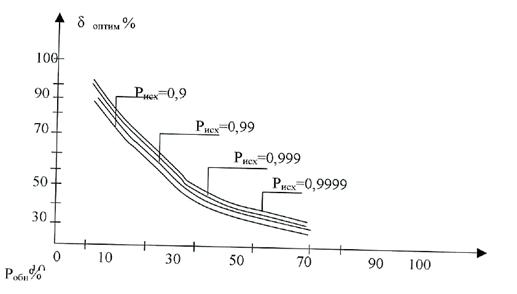
Рис. 4.9. График
зависимости  при различных
значениях
при различных
значениях
вероятности
безотказной работы исходной схемы
Из графика приведенного на рис. 4.1 видно, что при
малых значениях величины оптимального
объема встроенного контроля большие и
при различных вероятностях безотказной работы исходной (контролируемой) схемы
несколько отличны друг от друга. С увеличением
снижается величина  . И если верхним пределом величины объема встроенного
контроля было определено значение приближенно равное 30%, то нижней границей можно считать величину
приближенно равную 10%. Таким образом, эффективная величина объема встроенного
контроля цифровой системы лежит в диапазоне от 10% до 30% от величины объема
контролируемого оборудования.
. И если верхним пределом величины объема встроенного
контроля было определено значение приближенно равное 30%, то нижней границей можно считать величину
приближенно равную 10%. Таким образом, эффективная величина объема встроенного
контроля цифровой системы лежит в диапазоне от 10% до 30% от величины объема
контролируемого оборудования.
5. ТЕХНИЧЕСКИЕ СРЕДСТВА
КОНТРОЛЯ И ДИАГНОСТИКИ ЦИФРОВЫХ УСТРОЙСТВ
5.1.Логические зонды
и токовые индикаторы
Конструктивная компоновка современных цифровых систем
включает ТЭЗ, сменные цифровые платы, заменяемые при ремонте. Поиск
неисправностей в таких устройствах при
использовании традиционной контрольно-измерительной аппаратуры не дает приемлемых
результатов, а в ряде случаев является
практически невозможным [1,21,47,53].
Традиционной контрольно-измерительной аппаратурой
являются осциллографы, которые позволяют наблюдать на экране форму и
последовательность сигналов и измерять их параметры. Для контроля редких и
однократных сигналов применяются запоминающие осциллографы, которые имеют
достаточно высокую скорость записи, однако они имеют конечное время
воспроизведения регистрирующих сигналов. Более совершенными являются цифровые
осциллографы, которые преобразуют исследуемый сигнал в цифровую форму и
записывают полученные данные в быстродействующее ЗУ.
Этапы регистрации и индикации
разделены, а качество изображения не зависит от условий регистрации. Поэтому
цифровые осциллографы могут, как угодно долго воспроизводить форму как однократного,
так и периодического сигнала.
Применение МПК в современных
осциллографах расширяет функциональные возможности, которые обеспечивают
измерение напряжения на любом участке сигнала, напряжения между произвольными
точками сигнала, измерение размаха и временного интервала сигнала, нахождение
локальных максимальных и минимальных
значений сигналов и т.п.
Несмотря на широкие возможности осциллографов, применение их
при диагностировании цифровых устройств ограничено длиной входных
последовательностей импульсов. Если длина входных последовательности равна
десяткам или сотням тактовых интервалов, наблюдение ее на экране осциллографа
становится практически невозможным. При этом изменение одного бита данных в
цифровых устройствах может сделать всю цифровую систему неработоспособной.
Сложные контрольно-диагностические средства позволяют
проводить диагностику в цифровой плате с точностью до нескольких возможных
источников неисправностей. Это
объясняется тем, что функциональный контроль осуществляется со стороны
определенных контактов схемы (внешних
выводов или разъемов). При этом некоторые точки являются недоступными, в связи,
с чем возникает неопределенность диагностики неисправностей. Логические зонды
позволяют контролировать уровень постоянного или переменного напряжения в
исследуемой точке схемы. При этом индикатор расположен непосредственно на
приборе, а сами логические зонды используются для измерения логических
состояний внутренних узлов цифровой платы. Эти электрические методы диагностики
основаны на исследовании электрических сигналов, поступающих с исследуемых
цифровых плат. В большинстве случаев на этапе эксплуатации цифровые платы
лакированы и нет возможности обеспечить гальваническую связь средств
диагностики с самим объектом диагностики. В этих случаях поиск несправных
элементов, осуществляемых с помощью различных средств диагностики сопряжен с нарушением лакокрасочного покрытие
цифровой платы. Принимая во внимание высокую плотность используемого печатного
монтажа, это может привести к коротким замыканиям проводников или выводов интегральных
микросхем (ИМС). Для контроля токов в проводниках плат печатного монтажа и ИМС, защищенных
изоляционным покрытием применяются бесконтактные индикаторы импульсных токов,
осуществляющих индикацию без разрыва токопроводящих проводников и нарушения
изоляции [47,53]. Эти индикаторы могут применятся для поиска замыканий,
разрывов цепи, неисправностей в схемах монтажной логики и в шинах с тремя
состояниями. Метод бесконтактного измерения импульсных токов, основанный на
применении миниатюрных магниточувствительных элементов, устанавливаемых в
непосредственной близости от проводников с измеряемым током [47,53]. Бесконтактный
контроль тока обеспечивает возможность съема информации практически с любых
внутренних точек проверяемой цифровой платы. При этом активизация используемых
цепей обеспечивается генератором стимулирующих импульсов, а регистрация
протекающих токов – бесконтактным токовым индикатором, измеряющим амплитуду
любого импульса в импульсной последовательности.
Рассмотрим принцип
контроля, осуществляемого без разрыва токопроводящих соединений и нарушения
защитных покрытий на примере устройства диагностирования К762 [43]. Устройство
диагностирования электронной аппаратуры К762 предназначено для контроля и
измерения амплитуды импульсов электрического напряжения и тока на проводниках
печатных плат. Устройство состоит из бесконтактного цифрового
индикатора импульсных напряжений Ф7243,бесконтактного цифрового индикатора
токов Ф7244, генератора стимулирующего Ф7244С и блока питания.
Основные технические
данные:
1. Пороговые уровни
индикации амплитуды импульсов напряжения и токов в диапазоне
частот от 10 до 10 Гц:
от 0,5 до 4В с дискретностью 0,5 В;
от 1 до 8В с дискретностью 1В;
от 1 до 8
А с дискретностью 1 А;
от 10 до 80 А с дискретностью 10 А.
2. Устройство имеет
выход для подключения осциллографа, обеспечивающий
возможность наблюдения на его экране амплитуды контролируемых импульсов
напряжения и тока;
3. Устройство
позволяет производить калибровку индикатора напряжений и индикатора токов;
4. Время
установления рабочего режима устройства
не более 5мин;
5. Продолжительность
непрерывной работы устройства не менее 12ч;
6. Потребляемая
мощность не более 18ВА;
7. Питание
устройства осуществляется от сети однофазного переменного тока напряжением
(220+22)В, частотой (50+1)Гц.
Индикаторы
напряжений и токов выполнены в виде щупов с конусной частью. Чувствительные
элементы напряжений и токов выполнены в виде цилиндрических наконечников
(зондов), которые вставляются в гнездо, расположенное в конусной части
индикаторов. На корпусе индикаторов напряжений и токов расположены: диск переменного резистора КАЛИБРОВКА,
переключатель МНОЖИТЕЛЬ и цифровое табло. Генератор стимулирующий выполнен в
виде щупа. В конусной части щупа расположен металлический штырь с заостренным
концом для подачи стимулирующих импульсов на проверяемые узлы печатных плат.
Блок питания выполнен в виде отдельной коробки.
Рассмотрим работу индикатора напряжений Ф7243
(рис.5.1).
Чувствительный
элемент Е воспринимает электрическую составляющую электромагнитного поля
контролируемых импульсов напряжения и преобразует ее в сигнал электрического
напряжения. Сигнал чувствительного элемента усиливается предварительным
усилителем. С выхода предварительного усилителя сигнал поступает на согласующий
усилитель. Усиленный сигнал поступает на аналогово-цифровой преобразователь
(АЦП) взвешенного кодирования. Для преобразования выходного кода АЦП в
семисегментарный код индикатора НG служит дешифратор.
Сброс показаний отсчетного устройства осуществляется автоматически с помощью
генератора сброса.
Для исключения зависимости от скважности
следования импульсов сигнал с предварительного усилителя дифференцируется с
помощью дифференциальной цепочки, составленной из конденсатора Сg и входного
сопротивления согласующего усилителя. Переключатель SА служит для выбора
требуемого предела измерений.
Рассмотрим работу
индикатора токов Ф7244 (рис. 5.2). Чувствительный элемент Н воспринимает
магнитную составляющую электромагнитного поля контролируемых импульсов и
преобразует ее в сигнал электрического напряжения. Сигнал напряжения
чувствительного элемента через повышающий трансформатор (входной) ТВ
поступает на предварительный усилитель (Пр.ус).
С выхода Пр.ус. сигнал через делитель R1, R2 и переключатель SА множитель,
служащий для выбора требуемого предела измерений, поступает на согласующий
усилитель (С. ус.) Усиленный сигнал
поступает на АЦП взвешенного кодирования. Для преобразования выходного кода АЦП
в семисегментный код индикатора НG служит дешифратор.
Сброс показаний отсчетного устройства осуществляется автоматически с помощью генератора
сброса.
5.4. Методика измерения эталонных сигнатур и построения алгоритмов
поиска неисправностей с использованием сигнатурного анализа
Как указывалось ранее, метод сигнатурного анализа
требует в режиме проверки контролируемый
узел цифрового устройства выполнять периодически одну и ту же функцию. Это приводит к
непрерывно повторяющимся кодовым
комбинациям данных в узлах всей логической схемы. Устройство используемое для того, чтобы
зондировать точки (узлы) данных в логической схеме, распознает
повторяющиеся комбинации данных
посредством выдачи метки (сигнатуры), характеризующей накопленную комбинацию данных, возникающую за
точно определенной период времени.
Полученная сигнатура затем сравнивается с эталонной
сигнатурой, полученной с помощью цифрового устройства, работающего заведомо правильно. Несоответствие
сигнатур (полученных и эталонных) означает, что часть логической схемы
функционирует неправильно.
Для поиска неисправностей необходимо составить таблицу
эталонных сигнатур и алгоритм поиска неисправностей.
Основным схемоконструктивным фактором, определяющим
глубину поиска неисправности, является количество и размещение контрольных
точек. Рассмотрим это подробнее на
примере устройства, представляющего собой схему блока опорных частот (БОЧ)
каналообразующей аппаратуры [6,23,28].
БОЧ предназначен для формирования девяти периодических
импульсных сигналов от одного стабилизированного кварцем генератора. Частоты
следования импульсов в этих сигналах соответствуют 1, 2, 4, 8, 16, 32, 64, 128
и 256 гармоникам частоты 3840 Гц.
На рис. 5.8. приведена принципиальная схема платы
«БОЧ».
Блок
опорных частот содержит:
а) задающий генератор;
б) ключевой усилитель;
в) делитель частоты;
г) формирователи;
д) схему сигнализации.
Задающий генератор выполнен на транзисторах Т1, Т2 по
схеме двухкаскадного усилителя с кварцевым резонатором ПЭ1 и конденсатором С1 в цепе положительной
обратной связи. Конденсатор С1 предназначен для точной установки частот
генератора 1966,08 кГц, равной частоте кварцевого генератора. Применение в
цепи обратной связи генератора кварцевого
резонатора обеспечивает высокую стабильность генерируемых колебаний. Генерируемые импульсы с коллектора
транзистора Т 2, через разделительный конденсатор С2, поступают на вход
ключевого усилителя.
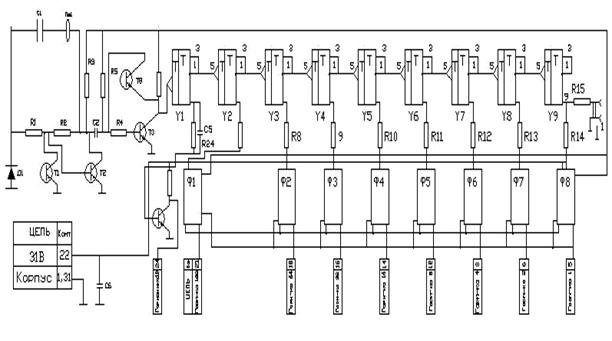
Рис.5.8.
Принципиальная схема платы блок опорных
частот
Ключевой усилитель, выполненный на транзисторе Т3,
уменьшает влияние делителя частоты на задающий генератор и увиливает крутизну
отрицательного фронта сигнала. С выхода усилителя (коллектор транзисторе Т3)
импульсы поступают на вход делителя частоты n = 512.
Делитель частоты выполнен на микросхемах У1…У9, представляющих
собой счетные триггеры. С выходом микросхем
У2…У9(вывод 9) через резисторы R7…R14
импульсы прямоугольной формы с частотой следования, соответствующей
делению частоты 1966,08 кГц на 4, 8, 16, 32, 64, 128, 256 поступают на входы
формирователей Ф1…Ф8. с выхода микросхемы У1 (вывод 9) через
резистор R24 импульсы
прямоугольной формы с частотой следования, соответствующей делению частоты
1966,08 кГц на 2, поступают на вход импульсивного усилителя, собранного на
транзисторе Т7 и далее на выход блока (Ш1-24).
К выходу делителя частоты (вывод 9 микросхемы У9)
подключены гнезда 3,84 кГц для контроля частоты 3840 Гц и схема сигнализации.
Измерения сигнатур в этом блоке может осуществляться
на выходах элементов делителя частоты, собранного на девяти интегральных
микросхемах типа 217 ТК 1А. Анализ показывает, что в целях снятия управляющих
сигналов для работы устройства сигнатурного анализатора могут быть использованы
три контрольные точки:
А)
точка самой высокой частоты (на выходе кварцевого элемента), с этой точки
снимается сигнал «ПУСК»;
Б)
точка самой низкой частоты (выход последнего триггера схемы), с этой точки
снимается сигнал «СТОП»;
В)
точка промежуточной частоты, с этой
точки снимается сигнал «ТАКТ».
В
таблице 5.1. представлены эталонные
сигнатуры на выходы цифровых узлов для методов СА
Таблица. 5.1.
Таблица эталонных сигнатур цифровых устройств
|
Выход
ИМС
Метод
|
Окно измерения 444 Блок опорных
частот
|
|
У9
5
|
У9
9
|
У9
1
|
У8
1
|
У8
5
|
У8
9
|
У7
1
|
У7
5
|
|
|
СА
|
8043
|
2СР7
|
7276
|
8043
|
АН8Н
|
Н9Н2
|
АН8Н
|
7742
|
|
|
У7
9
|
У6
1
|
У6
5
|
У5
1
|
У5
5
|
У5
9
|
У4
1
|
У4
5
|
У4
9
|
У3
1
|
|
0329
|
2А8А
|
0329
|
Н053
|
3291
|
Н053
|
911Р
|
0329
|
2А8А
|
0329
|
|
У3
5
|
У3
9
|
У2
1
|
У2
5
|
У2
9
|
У1
1
|
У1
5
|
У1
9
|
У8
1
|
У8
5
|
У8
9
|
|
Н053
|
3291
|
Н053
|
911Р
|
414Н
|
911Р
|
0000
|
0000
|
8043
|
А48Н
|
Н9Н2
|
Поиск неисправностей является наиболее сложным этапом
ремонтно-восстановительных работ. Алгоритмизация этого этапа связана с
определением набора операций, необходимых для поиска неисправностей, и их
последовательности, обычно оформляемой в виде алгоритма поиска. Алгоритм поиска неисправностей, представляющий
собой последовательность операций контроля, обычно оптимизируется по числу
отдельных проверок в алгоритме поиска или средних затрат на определение одного
различимого состояния цифрового устройства. Наиболее распространенными
способами построения алгоритмов поиска неисправностей являются способ последовательного
функционального анализа и способ половинного
разбиения [31,48].
Обычные древовидные схемы или алгоритмы для поиска
неисправностей являются полезным средством для восстановления неисправных
цифровых плат. В них можно включить эталонные сигнатуры.
Метод, который можно использовать при построении
древовидной схемы поиска неисправностей – это деление на половины. Он может
обеспечить кратчайший путь к
неисправностям. При делении на половины тестовая точка выбирается примерно на
полпути между началом и концом схемы, для которой равновероятно, что
неисправность может быть как до, так и после этой точки. Правильная сигнатура
означает, что все схемы, вплоть до этой точки, вероятно, хорошие и что
неисправность где то дальше, во 2-й половине. Неправильная сигнатура показывает
обратное. После того, как определена плохая половина, её также можно разделить
на половины. Процесс повторяется до тех пор, пока не будет найдена
неисправность.
Деления на половины можно сравнить с методом поиска
неисправности в обратном (к ядру) и прямом направлении (расширяем ядро).
Результат проверки сигнатур с выхода схемы, где обнаружено состояние
неисправности, к началу (по существу от выходов к выходам), пока не встретится
первый правильный результат, может быть обескураживающим для использующего этот
метод. Если получить один за другим неправильные результаты, то фактическое
состояние испытываемого блока может показаться хуже, чем есть на самом деле.
Движение в другом направлении (расширяя ядро)
обеспечивает большее понимание схемы и дает уверенность в том, что схема
работает правильно. Расширение ядра состоит
в том, чтобы добавлять и проверять куски схем до тех пор, пока не будет
найдена неисправная часть схемы. При таком способе часть схемы, которая
определена как хорошая, может быть использована для проверки остальной части
схемы.
Неисправность всегда обнаруживается в той части,
которая проверяется в последнюю очередь. Во время прямого и обратного
прослеживания всегда существует возможность того, что неисправность находится в
другом конце. Вот поэтому, чтобы сократить число шагов проверки, следует использовать определенные уровни
деления пополам. Чем лучше алгоритм поиска неисправностей, тем быстрее можно
найти неисправность, чем меньше нужды в сплошной проверке.
Используя вышеуказанные методы поиска неисправностей,
разработаны алгоритмы контроля для цифрового устройства, но оформленные в виде
соответствующих алгоритмов.
На рис.5.9. приведены алгоритмы контроля платы с
помощью СА методом с выхода на вход, а на рис.5.10. для этой платы построен
алгоритм, использующий метод половинного разбиения.
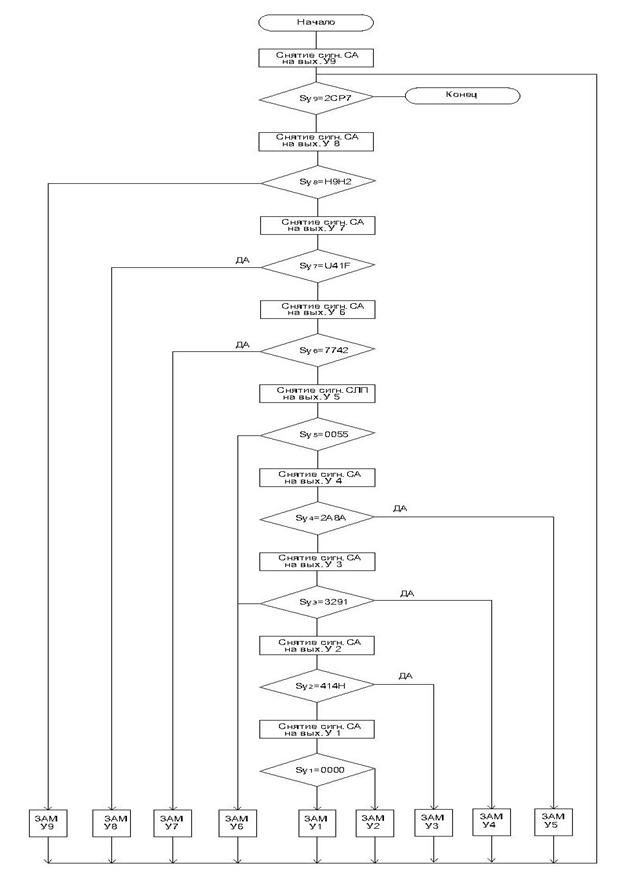
Рис.5.9. Алгоритм проверки работоспособности
БОЧ мощью СА с
выхода на вход.
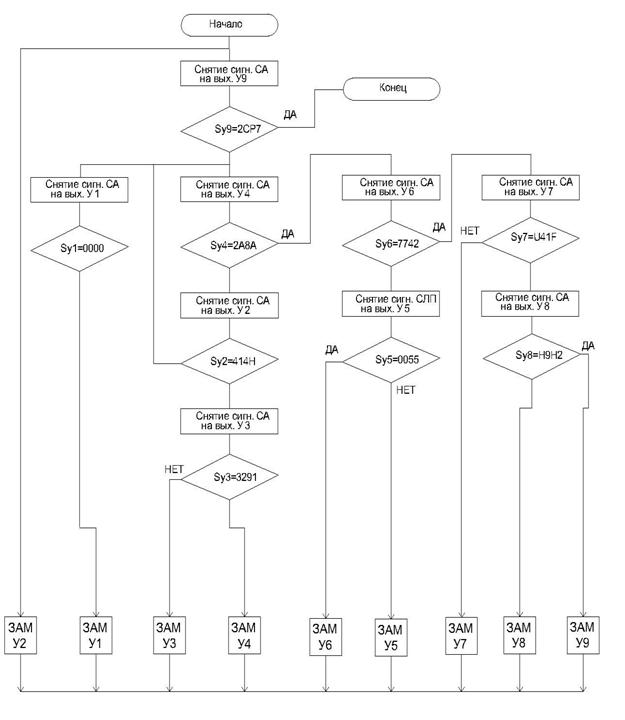
Рис.5.10. Алгоритм
проверки работоспособности БОЧ методом
деления на половины.
На
основании анализа приведенных алгоритмов контроля в табл.5.2. приведены
временные затраты на контроль.
Таблица 5.2.
Характеристики алгоритмов контроля
цифровых плат БОЧ СА
|
Обозначение
ИМС в
схеме
|
Наименование
ТЭЗ
|
|
Блока опорных частот
|
|
Алгоритм
|
|
Алгоритм контроля с выхода на вход
|
Алгоритм контроля деления на половины
|
|
Число изм.
|
Время изм.
|
Число изм.
|
Время изм.
|
|
У9
У8
У7
У6
У5
У4
У3
У2
У1
|
2
3
4
5
6
7
8
9
9
|
0,67
1,02
1,36
1,70
2,04
2,34
2,72
3,06
3,06
|
5
5
4
4
4
4
4
4
4
|
1,70
1,70
1,35
1,35
1,35
1,35
1,35
1,35
1,35
|
|
 , , 
|
53
|
17,97
|
38
|
12,85
|
|
 , , 
|
5,8
|
1,99
|
4,2
|
1,42
|
Из полученных данных видно, что метод половинного
разбиения позволяет уменьшить время контроля в 1,4 раза по сравнению с методом
с выхода на вход. Таким образом, на основании проведенных исследований можно
сделать вывод о том, что для диагностики основных блоков и их узлов с использованием СА наиболее целесообразно
использовать алгоритм проверки на базе метода половинного разбиения.
В общем случае время поиска неисправности цифровых устройств с
использованием СА можно оценить следующим выражением [20]:
 (5.1)
(5.1)
где  - время поиска неисправности;
- время поиска неисправности;
 - время, необходимое
на -ю коммутацию управляющих сигналов
- время, необходимое
на -ю коммутацию управляющих сигналов
сигнатурного анализатора;
 - время оценки
оператором сигнатуры на одном выводе ИС для
- время оценки
оператором сигнатуры на одном выводе ИС для
– й коммутации;
- проверка, для которой выполнены коммутации;
– суммарное количество
коммутаций управляющих сигналов при
проверке
МПК;
 - количество выводов
ИС, сигнатуры которых проверяются
при
- количество выводов
ИС, сигнатуры которых проверяются
при
- й коммутации;
 – количество коммутаций, в которых неисправность не была
– количество коммутаций, в которых неисправность не была
обнаружена;
- количество выводов ИС, сигнатуры которых
были проверке до
локализации,
в который неисправности для коммутации, в которой
она
была обнаружена.
Как показывает практическое использование сигнатурного
анализатора, время поиска неисправности в основной определяется вторым и
третьим слагаемыми в.
При поиске неисправности с использованием сигнатурного
анализатора необходимо определить
требования к контрольным точкам при таком поиске:
- контрольная точка должна быть
доступна для контректного
приспособления
сигнатурного анализатора;
- контрольная точка должна по
возможности быть выходным контактом
схемы,
который является логическим концом некоторой части схемы;
- в контрольной точке должна
отразиться любая неисправность,
возникшая в данной части схемы;
- множество
контрольных точек устройства должно покрывать всю его
схему
так, чтобы любая неисправность, возникшая в устройстве,
отразилась
бы в одной из контрольных точек, т.е. изменила сигнатуру
хотя
бы в одной из контрольных точек;
- количество
контрольных точек должно быть минимально.
Одним из основных требований сигнатурного анализа к
контрольным точкам является требование их доступности.
Таким образом, методика локализации неисправностей
цифрового устройства с помощью СА
состоит в следующем:
а) подать на вход устройства контролируемую последовательность;
б) определить
сигнатуры на выходах, если они не отличаются от
эталонных,
от блок исправен; в противном случае по
логике работы
схемы
определяется сигнатура в следующей контрольной точке;
в) считается,
что элемент неисправен, если
сигнатуры на входах его
верны, а хотя
бы одна выходная – нет;
г) определяются
все независимо неисправные элементы;
д) устраняются
причины неисправности;
е) заменяются
неисправные элементы;
ж) процесс диагностирования продолжается до тех пор, пока не будет
достигнуто
равенство реальных и эталонных сигнатур.
Таким образом,
располагая составленными алгоритмами контроля и поиска
неисправностей, принципиальными схемами
и схемами расположения элементов для
всех блоков оператор с помощью СА достаточно быстро
осуществит локализацию и устранение неисправностей цифрового устройства.
Результаты сравнительного анализа
характеристик существующих средств диагностики и их применяемости, представлены
в таблице. 5.3 [53,54].
Таблица 5.3.
Применяемость средств диагностики
|
Классы приборов
|
Применение
|
Уровень диагностики
|
Вид диагностируемой схем
|
|
Лаборатория
|
Производство
|
Эксплуатация
|
Прибор
|
Узел
|
Компо-
нента
|
Цифро-
вые
|
Микропро
цессорные
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
|
Логические анализаторы
|
++
|
+
|
|
++
|
+
|
|
++
|
+
|
|
Сравнивающие тестеры
|
+
|
++
|
|
|
++
|
+
|
++
|
|
|
Тестеры с
управляемым пробником
|
|
++
|
+
|
+
|
++
|
+
|
++
|
|
|
Внутри схемные эмуляторы
|
++
|
+
|
|
++
|
+
|
|
|
++
|
|
Сигнатурные анализаторы
|
+
|
++
|
++
|
+
|
++
|
++
|
++
|
++
|
Условные обозначения:
+ применяется
++ применение
оптимально (дает наилучшие результаты)
Из всего многообразия
средств диагностики, предназначенных для использования в условиях разработки,
производства и в процессе эксплуатации можно выделить 5 основных категорий. К
ним относятся:
1) логические анализаторы;
2) сравнивающие тестеры;
3) тестеры с управляемым пробником;
4) внутрисхемные эмуляторы;
5) сигнатурные анализаторы.
Основными критериями
при выборе средства диагностики могут быть:
1) минимальная трудоемкость при применении
диагностического средства;
2) простота интерпретации полученных результатов, не
требующая специальных знаний по проверяемой и диагностической аппаратуре;
3) глубина диагностики неисправности;
4) эффективность диагностики неисправности;
5) простота диагностической аппаратуры.
Сравнительный анализ показывает, что
наиболее простыми в применении, позволяющими производить высококачественную и быструю диагностику сложных
цифровых устройств в условиях
эксплуатации, являются средства, использующие метод сигнатурного
анализа.
ЗАКЛЮЧЕНИЕ
В условиях
рыночной экономики остро стоит
вопрос предоставления потребителям качественных услуг
телекоммуникаций, что
предполагает хорошо организованную систему сервисного
обслуживания и ремонта. Современные
цифровые сети и
системы телекоммуникаций представляют
сложные комплексы телекоммуникационного оборудования. Современное
телекоммуникационное оборудование имеет широкую номенклатуру используемых цифровых плат, для построения которых
используется элементная база,
основанная по применении БИС, СБИС и
МПК . В тоже время качество
телекоммуникационных цифровых систем
оценивается по возможностям технического
обслуживания и ремонта,
предоставляемым системой обслуживающему персоналу .Содержать квалифицированный персонал
на каждом узле
(станции) затруднительно, а в ряде
случаев практически невозможно. Поэтому устранение
неисправности, достигаемое простой
заменой цифровых плат,
требует их большого запаса.
Анализ
современного состояния и тенденций
развития сервисного обслуживания
и ремонта цифровых систем показывает, что в
настоящее время отсутствует
единая концепция их организации.
Поэтому одним из
эффективных путей улучшения
эксплуатационно -
технических характеристик цифровых систем является
повышение интенсивности ремонтно-восстановительных работ
на базе использования
перспективных методов и технических
средств контроля и
диагностики. Одной из главных
причин высокой трудоемкости контрольно-диагностических процедур
является большое время
поиска и локализации неисправностей в цифровых
системах. Научно
обоснованные решением сложных
задач контроля и диагностики
цифровых систем,
использующее в своем составе
комплекты БИС, СБИС и МПК,
может быть обеспечено на основе
системного подхода к разработке
контрольно-диагностического
обеспечения. В этой связи важнейшим
требованием на стадии эксплуатации
цифровых систем является поиск путей повышения уровня их
контролепригодности. Для
обеспечения единой стратегии
контроля и диагностики
цифровых систем
целесообразно наличие двух
уровней: верхний уровень- контроль и
диагностика с точностью
до ТЭЗа на базе
встроенных средств контроля,
нижний уровень- диагностика неисправностей с
помощью средств, на основе метода
сигнатурного анализа до неисправного элемента
в ТЭЗе.
СПИСОК
ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Абдуллаев
Д.А., Арипов М.Н. Основы эксплуатации систем передачи дискретных сообщений. –
Т.: Фан, 1984. - 113с.
2. Abramovici M, Breuer M.A,
Friedman A.D. Digital Systems Testing and Testable Design. IEEE Press, Piscataway, New
Jersey, 1994.
3. Арипов М.Н., Присяжнюк С.П., Шарифов Р.А.
Контроль и управление в сетях передачи данных с коммутацией пакетов. Ташкент.:
Фан, 1988. – 160с.
4. Арипов М.Н. Повышение надежности низкоскоростных
каналов
передачи
данных в АСУ. - Т.: Фан, 1981. -136с.
5. Арипов М.Н,
Захаров Г.П, Малиновский С.Т, Яновский Г.Г
Проектирование и техническая эксплуатация сетей передачи дискретных
сообщений. Под ред. Г.П. Захарова. – М.: Радио и связь, 1988. – 360с.
6. Аппаратура ТТ-12. Техническое описание и
инструкция по эксплуатации (РД
131.122.ТО); альбом схем (РД 2.131.122).
7.
Байда Н.П,
И.В.Кузмин, В.Т.Шпилевой. Микропроцессорные системы поэлементного
диагностирования РЭА. – М.: Радио и связь, 1987. - 256с.
8.
Берганов И.Р. Автоматизация технического
обслуживания первичной сети связи. Т.:
Изд-во Фан АН РУз. 1996. - 174с.
9.
Биргер И.А. Техническая диагностика. - М.:
Машиностроения, 1976. -240с.
10.
Бирюков В.В,
Коротаев Н.А. Диагностика неисправности. - Минск: Издательство БГУ, 1972.
11.
ГОСТ 25866-83. Эксплуатация техники. Термины и определения.
12. ГОСТ 18322-78. Система технического
обслуживания и ремонта техники. Термины и определения.
13. ГОСТ 20922-75. Техническая диагностика.
Термины и определения.
14. ГОСТ 20417-75. Техническая диагностика. Общие
требования к объектам диагностирования.
15.
ГОСТ 23564-79. Техническая диагностика. Показатели диагностирования.
16.
ГОСТ 26656-85. Техническая диагностика. Контролепригодность. Общие требования.
17. Гобземис
А.Ю., Удалов В.И. Методы тестового контроля микропроцессорных устройств.
Автоматика и вычислительная техника, 1978, N6.
18.
Гордон Г, Надиг Х. Локализация неисправностей в микропроцессорных
системах при помощи шестнадцатеричных
ключевых кодов.//Электроника.1977,N5,с.93-97.
19.
Гнедов Г.М. Контроль аппаратуры передачи данных. -М.: Радио и связь, 1983.-152с.
20.
Гуляев В.А., Кудряшов В.И. Автоматизация наладки и диагностирования
микроУВК.-М.:Энергоатомиздат,1992.-256с.
21.
Давыдов П.С. Техническая диагностика радиоэлектронных устройств
и систем. -М.:
Радио и связь, 1988. -256с.
22.Джейкокс Дж.
Руководство по поиску неисправностей в электронной аппаратуре. Перевод с англ.
– М.: Мир, 1989. - 176с.
23. Джураев Р.Х. Методическое указание к лабораторной работе
"Изучение сигнатурного метода диагностики цифровых устройств" по курсу
"Техническая диагностика цифровых систем". -Ташкент, ТЭИС, 1992.
-12с.
24. Джаббаров Ш.Ю.
Принципы контроля и
диагностики цифровых плат
цифрового
телекоммуникационного
оборудования.
Доклады и тезисы международной научно-технический
конференции. Состояния и перспективы развития связи и информационных
технологии. Ташкент 2005. с 28-29.
25. Джаббаров
Ш.Ю. Анализ методов расчета эталонных сигнатур в цифровых
устройствах.
Международная научная конференция. «Инфокоммуникационные и
вычислительные технологии в науке, технике и образовании». Доклады и тезисы
международной конференции. Ташкент 2004. с 389-393.
26. Джураев
Р.Х, Джаббаров Ш.Ю, Юлдашев М.Д. Принципы организации дистанционного
диагностирования цифровых систем. Методические указания к практическим занятиям
по курсу ТДЦС. – Ташкент 2003.
27. Джураев
Р.Х, Джаббаров Ш.Ю. Исследования влияния объема
встроенного контроля на надежностные
характеристики цифровой системы. Радиотехнические системы и устройства. Сборник
научных трудов профессорско-преподавательского состава, научных сотрудников и
аспирантов ТЭИС, часть 6. Ташкент 2001. с 48-52.
28. Джураев Р.Х. Методическое указание к лабораторной работе "Функциональный
контроль электронных плат аппаратуры ТТ-12 сигнатурным анализатором" по
курсу "Техническая диагностика цифровых систем".-Ташкент, ТЭИС, 1995.
-9с.
29.
Казьмина С.К. Компактное тестирование// Автоматика и телемеханика, 1982, N3, с.173-187.
30.
Кирьянов К.Г.,Соловейчик Э.Б. К проектированию РЭА, ориентированной на
диагностику сигнатурным анализатором. -Техника средств связи, Сер. Радиоизмерительная
техника, 1980, вып.1, с.9-83.
31.
Кудрицкий В.Д., Синицина М.А., Чинаев П.И. "Автоматизация контроля
радиоэлектронной аппаратуры/Под ред. П.И.Чинаева. -М.: Сов.радио.1977.-256с.
32.
Львович Г.А., Самощенко А.В., Хавкин В.Е. Диагностирование микропроцессорных
систем. -Обзоры по электронной технике. Сер.3.Микроэлектроника, вып.7. -М.: ЦНИИ
"Электроника", 1987. -84с.
33.Микропроцессоры:
Системы программирования и отладки/В.А.Мясников, М.Б.Игнатьев, А.А.Кочкин, Ю.Е.Шейнин/Под
ред.В.А.Мясникова и М.Б.Игнатьева. -М.: Энергоатомиздат, 1985. -272с.
34. Микропроцессоры: В 3-х кн.Кн.3. Средства отладки,
лабораторный
практикум и
задачник: Учебн. для втузов/Н.В.Воробьев, В.Л.Горбунов, А.В.Горячев и др.
Под.ред. Л.Н.Преснухина. -М.: Высшая школа, 1986.
-351с.
35. Неразрушающий
контроль элементов и узлов радиоэлектронной
аппаратуры. Под.ред. Б.Е.Бердичевского. -М.:
Сов.радио, 1976.
36. Новик Г.Х., Сташин
В.В., Мазур Е.И. Элементы теории сигнатурного
анализа. -В кн. Труды
инженеров железнодорожного транспорта. -М.:
1979, вып.642, с.52-59.
37. Пархоменко П.П.,
Согомонян Е.С. Основы технической диагностики.
Кн.2/Под.ред. П.П.Пархоменко.
-М.: Энергия, 1981.-264с.
38. Рохмистров А.Н.,
Герценов А.Г. Метод определения характеристик
достоверности систем
автоматического контроля радиопередающих устройств. В сб.: Труды учебных
институтов связи. Системы и средства передачи информации по каналам связи. -Л.,
1981. с.97-104.
39. Tst 45.049.2003.
Техническая эксплуатация, обслуживания и ремонт
средств и
систем телекоммуникаций. Основные термины и определения.
40.
Угольников С.В. Автоматическая система диагностики неисправностей бытовой РЭА в
условиях производства. Средства связи, 1977, N3.
41. Уильямс Г.Б.
Отладка микропроцессорных систем: Пер. с англ.- М.: Энергоатомиздат, 1988.
-253с.
42.
Уманский А.М. Графоаналитический метод определения стационарных характеристик
надежности радиоэлектронной аппаратуры. В сб.: Вопросы радиоэлектроники, сер. Техника
радиосвязи,1975,вып.2, с.93-103.
43.
Устройство диагностирования электронной аппаратуры К762.Паспорт
ЗПУ.399.002.ПС
44.
Фергусон Дж,
Макари Л, Уилльямз П. Обслуживание микропроцессорных систем: Пер. с англ.-
М.: Мир, 1989. - 336с.
45.
Хаханов В.И.
Техническая диагностика цифровых микропроцессорных устройств. Учебник. К.:IЗМН, 1995. -
252с.
46.
Хаханов В.И.
Техническая диагностика элементов и узлов персональных компьютеров. К.: IЗМН,
1997. - 308с.
47.
Хавкин В.Е., Барашенков
Б.В., Вершинин В.О. Контроль и диагностика микро-ЭВМ. -Обзоры по электронной
технике.Сер.3.Микроэлектроника, вып.4.-М.:ЦНИИ
"Электроника",1979,-82с.
48. Щербаков Н.С. Достоверность работы
цифровых устройств. М.: Машиностроение,1989.
49.
Эксплуатация систем передачи данных./Под. ред. Л.И.Зубовского.-М.:Связь,1980.-184с.
50.
Ярмольник В.Н. Контроль и диагностика цифровых узлов ЭВМ. -Мн.: Наука и
техника,1988.-240с.
51. Игнатов В.А.
Теория информации и передачи сигналов: Учебник для вузов. – 2-е изд., перераб.
и доп. – М.: Радио и связь, 1991. – 280с.
52. Отказоустойчивость систем передачи данных / Г. И. Шакун и др. М.: Радио и связь, 1984. -
144с.
53. Львович Г.А, Самощенко А. В, Хавкин В.Е.
Диагностирование микропроцессорных систем, – Обзоры по электронной технике.
Сер.3. Микроэлектроника, вып.7. – М.: ЦНИИ Электроника, 1987. – 84с.
54. Львович
Г.А, Хавкин В.Е. Самодиагностирование и
самовосстановление микропроцессорных систем. - Обзоры по электронной технике.
Сер. 3. Микроэлектроника, вып.5 (1158), -М.: ЦНИИ Электроника, 1985, с 55.
55. Джалилов М.И, Джураев Р.Х, Джаббаров Ш.Ю, Джураев О.Р Исследование
модели неисправности и диагностики цифровых устройств АПД. Труды академии вооруженных сил Республики Узбекистан
№2 2005. Ташкент 2005. с 109-113.
ОГЛАВЛЕНИЕ
|
|
ВВЕДЕНИЕ
|
3
|
|
|
|
|
|
1.
|
ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ ЦИФРОВЫХ СИСТЕМ И УСТРОЙСТВ
|
5
|
|
1.1.
|
Жизненный цикл цифровой системы
|
5
|
|
1.2.
|
Основные задачи теории технической эксплуатации цифровых систем
|
7
|
|
1.3.
|
Общие принципы построения системы технической эксплуатации
|
9
|
|
|
|
|
|
2.
|
ОСНОВЫ КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ЦИФРОВЫХ СИСТЕМ
|
14
|
|
2.1.
|
Основные понятия и определения
|
14
|
|
2.2.
|
Задачи и классификация систем технической диагностики
|
16
|
|
2.3
|
Показатели диагностирования и контролепригодности
|
19
|
|
|
|
|
|
3.
|
ЭЛЕМЕНТЫ ЦИФРОВЫХ СИСТЕМ И ПРОБЛЕМЫ ПОВЫШЕНИЯ ИХ НАДЕЖНОСТИ
|
24
|
|
3.1.
|
Цифровые системы, основные критерии надежности
|
24
|
|
3.2.
|
Пути повышения надежности цифровых систем
|
27
|
|
3.3
|
Анализ стратегии диагностики и восстановления работоспособности
цифровых систем
|
31
|
|
|
|
|
|
4.
|
МЕТОДЫ КОНТРОЛЯ И ДИАГНОСТИКИ ЦИФРОВЫХ СИСТЕМ
|
35
|
|
4.1.
|
Особенности современных цифровых систем как объекта контроля и
диагностики
|
35
|
|
4.2.
|
Анализ моделей неисправности цифровых устройств
|
38
|
|
4.3.
|
Виды и методы контроля и диагностики
|
44
|
|
4.4.
|
Встроенный контроль цифровых систем
|
49
|
|
|
|
|
|
5.
|
ТЕХНИЧЕСКИЕ СРЕДСТВА КОНТРОЛЯ И ДИАГНОСТИКИ ЦИФРОВЫХ УСТРОЙСТВ
|
56
|
|
5.1.
|
Логические зонды и токовые индикаторы
|
56
|
|
5.2.
|
Логические анализаторы
|
61
|
|
5.3.
|
Сигнатурный анализатор
|
64
|
|
5.4.
|
Методика измерения эталонных сигнатур и построения алгоритма
поиска неисправностей с использованием сигнатурного анализатора
|
68
|
|
|
|
|
|
|
ЗАКЛЮЧЕНИЕ
|
|
|
|
|
|
|
|
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
|
|
|
|
Техническая диагностика цифровых систем
Учебное пособие по направлению образования «5522200 - Телекоммуникация»
Рассмотрено и рекомендовано к изданию на заседании научно -
методического Совета ТУИТ от «___» ________2006г, протокол №_____
Составители:
д.т.н., проф. Арипов МН
ст. преп. Джураев Р.Х
ст. преп. Джаббаров Ш.Ю
Ответственный редактор:
Турсунходжаева Т.З.
Корректор: Абдуллаева С.Х
|