УЗБЕКСКОЕ АГЕНТСТВО СВЯЗИ И ИНФОРМАТИЗАЦИИ
ТАШКЕНТСКИЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
Б.М. Махкамджанов, М.Э. Яськова, У.Т. Алиев,
«Электропитание устройств связи»
Ташкент 2005
ПРЕДИСЛОВИЕ
В пособии приведены общие понятия о традиционных источниках энергии, выработке электрической энергии и ее распределения. Рассматриваются отдельные элементы и узлы системы электроснабжения, их принципы действия и конструкции. Также показаны и описаны схемы трансформаторов, выпрямителей, а также общие построения электропитающих устройств аппаратуры и установок систем электропитания предприятий связи. Большое внимание уделено физическим процессам и явлениям, связанным с коммутацией тока в цепях с реактивными элементами. Введен новый раздел о нетрадиционных и возобновляемых источниках энергии, где приводятся способы и схемы преобразования возобновляемой энергии (солнце, ветер).
Учебное пособие представляет интерес для студентов, обучающихся по направлениям образования «Телекоммуникация», «Радиосвязь, радиовещание и телевидение», «Радиотехника», «Профессиональное образование телекоммуникации» и т.д.
Введение, раздел 1 - “Первичные источники электроэнергии”, включая пункты 1.1 - 1.7, раздел 2 - “Вторичные источники электроэнергии”, включая пункты 2.7, 2.9 написаны Б.М.Махкамджановым, раздел 1, включая 1.8, 1.9, раздел 2 , включая 2.1, 2.2, 2.3, 2.4 написаны М.Э.Яськовой, раздел 1, включая пункт 1.10, раздел 2, включая пункты 2.5, 2.6, 2.8, написаны У.Т.Алиевым.
Авторы выражают искреннюю благодарность доц. Гультураеву Н.Х., доц. Ибраимову Р.Р. за ценные замечания и рекомендации при подготовке и оформлении учебного пособия, а также ассистенту кафедры ЭПУС Сидельниковой А.В. за оказанную техническую помощь при оформлении книги.
Оглавление
Введение………………………………………………………………………3
Раздел 1. Первичные источники электроэнергии…………………….……4
1.1. Возобновляемые источники энергии и их потенциал……….…..4
1.2. Солнечная энергия и способы её преобразования……………….8
1.3. Энергия ветра и принципы её преобразования …………………11
1.4. Трансформаторы…………………………………………………..15
1.5. Режимы работы трансформатора…………………………………18
1.6. Автотрансформаторы, измерительные трансформаторы……….28
1.7. Трехфазные цепи, трехфазные трансформаторы………….……34
1.8. Электрические машины,
1.9. Асинхронные машины…………………………..………………..42
1.10. Синхронные машины……………………………………………49
1.11. Машины постоянного тока………………………………………55
Раздел 2. Вторичные источники электроэнергии…………………………..65
2.1. Выпрямители……………………………………………………….65
2.2. Однотактные схемы выпрямления………………………………..70
2.3. Двухтактные схемы выпрямления………………………………..74
2.4. Сглаживающие фильтры…………………………………………..80
2.5. Преобразователи напряжения…………………………………….94
2.6. Стабилизаторы……………………………………………………..98
2.7. Параметрические стабилизаторы…………………………………101
2.8. Компенсационные стабилизаторы …………..…………………..106
2.9. Импульсные стабилизаторы напряжения………………………..109
Литература…………………………………………………………………….112
Введение
Получение и передача электрической энергии
Электрическую энергию получают из других видов энергии непосредственно или путём промежуточных преобразований. Для этого используют природные энергетические ресурсы – органическое и ядерное топливо, а также возобновляемые источники энергии: течение рек, водопады, океанские приливы, солнечную радиацию, ветер, геотермальные источники, биомассу и т.д.
Электрическую энергию широко используют во многих отраслях промышленного и сельскохозяйственного производства, на транспорте, в системе связи, в науке, быту и т.д. Производство электрической энергии и её распределение относится к отрасли энергетики. Поэтому энергетика является ключевой отраслью народного хозяйства страны.
В настоящее время для создания системы электрификации страны и обеспечения электроснабжения различных отраслей народного хозяйства наибольшую часть электрической энергии (порядка 80%) производят путём преобразования химической энергии органического топлива на тепловых электростанциях (ТЭС).
Принцип работы ТЭС. Сжигается топливо, например, мазут, уголь, газ и тепловая энергия через форсунки поступает на нижнюю поверхность котла, заполненный водой. Вода в котле закипает и в верхней части котла образуется пар высокого давления. Пар через трубы поступает в отсек, где расположена паровая турбина. Под давлением пара ротор турбины вращается. Следовательно, происходит процесс преобразования тепловой энергии в механическую. Следующий этап, механическая энергия, которая получается в момент вращения ротора генератора, преобразуется в электрическую.
На втором месте по объёму производства электрической энергии находятся гидроэлектростанции (ГЭС), где используется энергия течения рек, преобразуемая с помощью гидротурбины и гидрогенераторов в электрическую, например, Волжская ГЭС, Красноярская ГЭС, Чарвакская ГЭС, Буржарская ГЭС и т.д.
Наряду основных производителей энергии следом за тепловым и гидроэлектростанциями стоят атомные электростанции (АЭС). Первичным видом энергии на АЭС является энергия ядер атомов, которую преобразуют в тепловую энергию, а далее схема получения электрической энергии аналогична схеме тепловой станции.
Учитывая быстрое уменьшение запасов органического топлива, а также неблагоприятное воздействие тепловых электростанций на окружающую природу, ведутся поиски технически и экономически удовлетворительных решений для получения электроэнергии на базе использования возобновляемых источников энергии (ВИЭ).
Прямое преобразование химической, тепловой, лучистой энергии в электрическую осуществляется с помощью электрохимических, теплоэлектрических, термоэмиссионных, фотоэлектрических генераторов. Эти устройства имеют малую мощность и поэтому для большой энергетики непригодны, а применяются главным образом в радиотехнике, космической технике, для энергоснабжения индивидуальных потребителей и фермерских хозяйств.
Данное учебное пособие составлено из двух разделов:
Раздел 1. Первичные источники электроэнергии. В разделе приводятся основные понятия и определения возобновляемых и невозобновляемых источников энергии. Рассматриваются общие принципы преобразования тепловой и механической энергии в электрическую и ее передача на расстояние.
Раздел 2. Вторичные источники электроэнергии. В разделе рассмотрены принципы работы вторичных источников энергии, это выпрямители, фильтры, преобразователи напряжения и стабилизаторы.
1. Первичные источники электроэнергии
1.1. Возобновляемые источники энергии и их потенциал
Основные понятия и определения
Определения. Все источники энергии можно разделить на два класса.
Возобновляемые источники энергии - это источники на основе постоянно существующих или периодически возникающих в окружающей среде потоков энергии. Типичный пример такого источника - солнечное излучение с характерным периодом повторения - 24 часа. Возобновляемая энергия присутствует в окружающей среде в виде энергии, не являющейся следствием целенаправленной деятельности человека, и это является её отличительным признаком.
Невозобновляемые источники энергии - это природные запасы вещества и материалов, которые могут быть использованы человеком для производства энергии. Примером могут служить ядерное топливо, уголь, нефть, газ. Энергия невозобновляемых источников в отличие от возобновляемых находятся в природе в связанном состоянии и высвобождаются в результате целенаправленных действий человека. Известно, что валовое потребление первичных энергоресурсов с начала ХХ века возросло более, чем в 10 раз. Всё большая часть человечества начинает осознавать конечность, исчерпаемость и невозобновляемость традиционных источников энергии (угля, нефти, газа), а так же приносимый ущерб окружающей среде от их использования. По оценке учёных нефти и газа хватит лишь на ближайшие десятилетия, угля - на столетия. Доля этих источников в современном балансе энергопотребления составляет: нефти - 38%, газа - 20%, угля - 27%, т.е. в целом - 85% от общего потребления. Поэтому целесообразно называть невозобновляемые источники энергии истощаемыми источниками энергии.
Прежде, чем говорить о возможностях ВИЭ, необходимо оценить их ресурсы и технический потенциал в мире. Доминирующую роль в балансе мощности ВИЭ играет энергия Солнца, составляющая 99.9%. Соответственно 0.09% и 0.01% приходится на внутреннюю энергию Земли и гравитационные силы (Табл.1.1).
Существует пять основных источников энергии:
- Солнечное излучение,
- Движение и притяжение Солнца, Луны и Земли (гравитационное притяжение),
- Тепловая энергия ядра Земли, а так же химических реакций и радиоактивного распада в её недрах,
- Ядерные реакции,
- Химические реакции различных веществ.
Таблица 1.1
Ресурсы возможных источников энергии
|
Виды энергии |
Ресурсы, |
||||||
|
теоретические |
технические |
||||||
|
в мире |
в СНГ |
||||||
|
Энергия Солнца на верхней границе атмосферы Земли на поверхности Земли, в том числе: на поверхности суши на поверхности мирового океана |
183000 75913 26370 49543 |
- 5708 2283 3425 |
- 536 217 320 |
|
||||
|
Энергия ветра |
1982 |
21 |
3.4 |
|
||||
|
Геотермальная энергия (до глубины 10 км) изливающиеся источники гидротермальные ресурсы ветрогеотермальные ресурсы |
34 1256 34247 |
0.4 137 2853 |
0.02 6.8 137 |
|
||||
|
Энергия Мирового океана градиент солёности тепловая (температурный градиент) приливов прибоя морских ветровых волн |
39954 11.5 8 3 0.9 2.5 |
399 0.6 0.14 0.8 0.023 0.09 |
90 0.14 0.023 0.2 0.006 0.023 |
|
||||
|
Энергия биомассы на суше в мировом океане органические отходы |
41 22 2.3 |
4.6 1.7 1.4 |
0.37 0.14 0.08 |
|
||||
|
Гидроэнергия Крупных водотоков Малых водотоков |
3.7 1.7 |
1.7 0.85 |
0.23 0.06 |
|
||||
Возобновляемые источники энергии привлекают своей относительной экологической чистотой, и поэтому появляется принципиальная возможность открывать и использовать новые источники энергии. При этом, создавая эффективные устройства для преобразования ВИЭ в электрическую и тепловую энергию.
Наиболее интересными видами ВИЭ являются солнечная энергия, тепловая геотермальная энергия, приходящая из недр Земли, гидравлическая энергия от использования приливно-отливных явлений и энергия ветра, порождаемых гравитационным взаимодействием Земли, Луны и Солнца.
Система аккумулирования энергии
Интенсивность солнечной радиации и скорость ветрового потока изменяются и чаще всего принимают хаотический характер, и естественно, энергии солнечного излучения и энергию ветрового потока в суточном интервале не представляется возможным преобразовывать. Однако, изменчивость каждого из источников имеет разную амплитуду и продолжительность: солнечная энергия в суточном амплитуде имеет значительную детерминированную составляющую; ветровая энергия имеет значительную импульсирующую составляющую в краткосрочном разрезе (часовая и даже внутричасовая).
Таким образом, каждый из источников возобновляемой энергии имеет свои особенности с точки зрения требований к системам аккумулирования. Технически возможны и существуют различные системы аккумулирования, предполагающих сохранение энергии в виде тепловой, механической или электрической энергии. На рис. 1.1 приведена классификация наиболее распространённых аккумулирующих систем. Цифровые значения знаменателя соответствуют удельной энергии, запасаемой аккумулятором. Каждая из аккумулирующих систем имеет свои достоинства и недостатки, которые делают её эффективной для конкретной системы энергоснабжения.
При аккумулировании энергии возобновляемых источников для целей электроснабжения наиболее распространены системы, приведённые на рис. 1.2. Эти аккумуляторы могут явиться составной частью технологических схем преобразования возобновляемой энергии в электрическую, позволяет стабилизировать их выработку. Например, на гидроаккумулирующей электрической станции (ГАЭС), аккумулятором служит верхний водоём. Когда ночью наблюдается уменьшение нагрузок в графике нагрузки энергосистемы, агрегаты ГАЭС в насосном режиме накачивают воду в верхний водоём. В дневное время, при повышении энергопотребления в суточном графике нагрузки, энергия поднятой воды используется для выработки электрической энергии.
Приведённые системы аккумулирования ВИЭ применяются в основном в большой энергетике. Для малой энергетики наиболее интересным видом аккумулирования являются гальванические элементы, т.е. химические аккумуляторные батареи или емкостные накопители.
 |
Рис. 1.1. Классификация аккумулирующих систем
 |
Рис. 1.2. Типы аккумулирующих установок
1.2. Солнечная энергия и способы её преобразования
Наибольшая плотность потока солнечного излучения, приходящего на Землю, составляет примерно 1 кВт/м2 в диапазоне длин волн 0.3-2.5 мкм. Это излучение называется коротковолновым и включает видимый спектр. Для населённых пунктов в зависимости от места, времени суток и погоды потоки солнечной энергии, достигающие Земли, меняются от 3 до 10 МДж/м2 в день. Солнечное излучение характеризуется энергией фотонов в максимуме распределения порядка 2 эВ, определённой по температуре поверхности Солнца около 6000оК. Потоки энергии излучения, связывающие атмосферу с поверхностью Земли, тоже порядка 1 кВт/м2, но они перекрывают другой спектральный диапазон - от 5 до 25 мкм, называемый длинноволновым, с максимумом около 10 мкм. По спектру коротковолновое и длинноволновое излучения расположены друг от друга достаточно далеко и могут быть легко различимы.
Основной целью этого раздела является более подробно показать, можно ли использовать энергию солнечного излучения в качестве энергии, подводимой к солнечному устройству, ориентированному определённым образом, в определённом месте и в определённое время. Для этого полезным будет представление геометрии Земли и Солнца. На рис.1.3 изображена структура Земли. Земля обращается за 24 часа вокруг своей оси (ось обозначена точками северного и южного полюсов N и S). Ось перпендикулярна экваториальной плоскости Земли. Точки P, E и G на поверхности Земли характеризуются широтой j и долготой y. Часовой угол w в точке Р есть угол, на который Земля поворачивается с момента солнечного полдня. Так как Земля поворачивается за 1 час на 3600/24 = 150, то часовой угол определяется выражением
w = (15о × ч -1) (tsolar - 12 ч) = (15о × ч -1) - (tzone - 12 ч) + weq + (y - yzone), (1.1)
где tsolar и tzonе - соответственно локальное солнечное и декретное время (в часах); yzone - долгота, на которой находится Солнце, когда tzonе соответствует полудню (когда солнечное и декретное время совпадают, т.е. tsolar = tzonе).
Земля обращается вокруг Солнца за 1 год. Направление земной оси остаётся фиксированным в пространстве под углом d0 = 23.50 к нормали к плоскости вращения. Угол между направлением к Солнцу и экваториальной плоскостью называется склонением d и является мерой сезонных изменений. Склонение есть широта точки, для которой Солнце находится в зените в полдень по солнечному времени. В северном полушарии d плавно меняется от d0 = +23.50 в период летнего солнцестояния до d0 = -23.50 в период зимнего солнцестояния. Аналитически получено выражение (см. рис.1.4)
d = d0 * Sin[3600 * (284 + n) / 365] , (1.2)
где n - день, года (n = 1 соответствует 1 Январю).

Рис.1.3. Схема определения широты j и долготы y,
1 - экваториальная плоскость, 2 - меридиональная плоскость.

Рис.1.4. Схема освещения поверхности Земли солнечным излучением
в различные времена года
Лучистая энергия Солнца, распространяющаяся во все стороны, составляет 4 ×1020 млн. кВт. Из этого количества на Землю приходится менее одной миллиардной части, что составляет 1.78 ×1017 Вт, в то время, как потребляемая энергия на Земле составляет около 3×1011 МДж. На поверхность Земли попадает малое количество энергии за счёт следующих факторов:
- высоты Солнца над горизонтом из-за наклона оси вращения Земли;
состояния атмосферы;
- оптических свойств поверхности.
При наиболее благоприятных условиях, т.е. в районах близких к экватору, когда Солнце в Зените, а небо безоблачно, на 1 м2 поверхности можно поднять до 1 кВт лучистой энергии.
Существует два способа преобразования солнечной энергии: прямое преобразование солнечного излучения в электрическую (фотопреобразователем) и преобразование в тепловую энергию (солнечные коллекторы). Для прямого преобразования солнечного излучения используются полупроводниковые материалы.
Солнечные элементы
Полупроводниковые материалы, из которых изготавливаются солнечные элементы, имеют удельное сопротивление от 10-2 до 102 Ом×см. Полупроводники бывают р-типа или n-типа. Процесс преобразования солнечной энергии в электрическую сопровождается фотоэлектрическим эффектом. Он возникает в поверхностных слоях полупроводника, толщиной 2-3 мкм в виде некоторого количества свободных электронов. С появлением в теле полупроводника свободных электронов и при наличии разности электрических потенциалов в нём возникает электрический ток. Разность потенциалов образуется между облучаемой поверхностью полупроводника и его теневой стороной за счёт внедрения в его поверхностные слои специальных добавок (рис.1.5).

Рис.1.5. Схема p-n перехода
Один из добавок (n-типа) образует дополнительные электроны и отрицательный заряд поверхности, другой (р-типа) - дефицит электронов и, следовательно, положительный заряд. На границе образуется контактная разность потенциалов вследствие диффузии электронов. Если полупроводник с дырочной (р-типа) проводимостью освещается, то его электроны, поглощая кванты света, переходят на полупроводник с электронной (n-типа) проводимостью. В замкнутой цепи при этом образуется электрический ток.
Чаще всего используют солнечные элементы из кремния. Кремний - один из самых распространённых элементов на Земле. Элементы производятся путём плавления кремния и затем выращивания кристаллического кремния в виде круглых стержней диаметром от 5 до 10 см. Для получения непосредственно полупроводниковых элементов эти стержни разрезаются на тонкие пластинки толщиной около 300 мкм, которые и служат основной частью фотоэлектрических элементов.
При освещении фотоэлемент генерирует электрическое напряжение величиной 0.5 В. Независимо от типа и схемы включения все (большие и малые) фотоэлементы генерируют напряжение 0.5 В. По иному обстоит дело с выходным током элемента. Он зависит от интенсивности света и размера элемента, под которым подразумевается площадь поверхности. Сила тока зависит также от длины волны света и его интенсивности, причём она прямо пропорциональна интенсивности его излучения. Чем ярче свет, тем больший ток генерируется солнечным элементом. В наземных условиях с интенсивностью светового излучения 1 кВт/м2 КПД данных элементов может достичь 22-26%, а у промышленных образцов - 10-14%.
Среди перспективных солнечных элементов следует отметить гетероструктуры на основе сульфида кадмия, лучшие из которых имеют КПД выше 10%. Ещё один перспективный полупроводниковый материал – арсенид галлия. Он обладает высокой эффективностью по преобразованию лучистой энергии в электрическую с КПД до 27%. Это самый высокий КПД для солнечных фотоэлектрических генераторов. Кроме того, арсенид галлия проявляет стабильность при температурах, превышающих 1000С. Достигнутые значения КПД солнечных элементов из различных элементов приведены
в табл. 1.2.
Таблица 1.2
Энергетические характеристики современных солнечных
элементов
|
п/п |
Солнечный элемент |
Максимальный КПД |
Экспериментально зафиксированный КПД |
|
1. 2. 3.
4. 5.
|
Кремний (Si) Арсенид галлия (GaAs) Трёхкомпонентные соединения меди (CdS- CuInSi) Кадмий-теллур (Cd - Te) Аморфный кремний (L - Si) Каскадный элемент (GaAs+Ga Sb) |
25 35
17 -
- |
23.2 29*
10.5 15.7
37* |
* - при концентрированном излучении.
1.3. Энергия ветра и принципы её преобразования
В связи с энергетическим кризисом во многих развитых странах Европы приняты и реализуются крупномасштабные целевые программы освоения нетрадиционных энергоресурсов, в частности, энергии ветра. Ветер является случайным неуправляемым природным процессом, вызванный действием Солнца и вращением Земли. К характерным особенностям ветра, как энергетического источника, относится, прежде всего, его непостоянство, которое обусловлено главным образом большой изменчивостью скоростей. Это приводит к изменению кинетической энергии ветрового потока в больших пределах даже в течение относительно малых промежутков времени. То есть от нулевой энергии при штиле и до, во много раз превышающей расчётной в периоды буревых и ураганных усилий скорости.
Сила и направление ветра в различных зонах по-разному изменяется в зависимости от высоты над поверхностью Земли. Например, в северном полушарии ближе к поверхности Земли (20÷50 м) средняя скорость составляет 7-9 м/c. Скорость ветра, превышающая 25÷30 м/c, может нанести серьёзный ущерб неродному хозяйству и поэтому энергию ветра для её преобразования в механическую или в электрическую энергию эффективно можно использовать при скорости ветра от 3 м/c до 25 м/c.
Энергия воздушного потока с поперечным сечением F равна
Е = m·υ2/2 , (Дж) (1.3)
Секундная масса m воздуха, протекающая со скоростью υ через это сечение соответствует
m = ρ·F·υ, (кг/с) (1.4)
тогда
Е = ρ·υ3·F/2, (Дж/c) (1.5)
где ρ – плотность воздуха, равная для нормальных условий 1,23 кг/м3 (при t = 150C, ρ = 101,3 кПа или 760 мм рт.ст). Таким образом, энергия ветра изменяется пропорционально кубу его скорости. Ветроколесо может преобразовать в полезную работу только часть этой энергии, которая оценивается коэффициентом использования энергии ветра. Современные ветродвигатели (ВД) при работе в нормальном режиме преобразуют в механическую работу не более 45–48% кинетической энергии ветрового потока. Для идеального случая по теории И.Е.Жуковского
ξ = ЕВД / Е, ξ = 0,593 (1.6)
то есть часть полной энергии потока, воспринятой ветроколесом, которую ветродвигатель преобразует в механическую энергию.
Удельная мощность (секундная энергия), которая заключена в потоке, имеющем поперечное сечение, равное 1м2 при t = 150C и ρ = 101,3 кПа округленно составляет:
|
Скорость ветра, м/с |
4 |
6 |
8 |
10 |
14 |
18 |
22 |
|
Мощность потока, кВт/м2 |
0,04 |
0,13 |
0,31 |
0,61 |
1,67 |
3,6 |
6,25 |
Секундная работа или мощность, Н·м/с, развиваемая ветроколесом, определяется по формуле:
Р = ρ·υ3·F·ξ / 2 (1.7)
Принципы преобразования энергии ветра и ветровые энергоустановки
Воздушный поток, как и любое движущиеся тело, обладает энергией движения, или запасом кинетической энергии. Эта кинетическая энергия с помощью ветроколеса или другого рабочего органа преобразуется в механическую энергию. В зависимости от назначения ветроустановки механическая энергия с помощью исполнительных механизмов (генератора, компрессора, электролизёра и т.д.) может быть преобразована в электрическую, тепловую, механическую энергию, а так же в энергию сжатого воздуха.
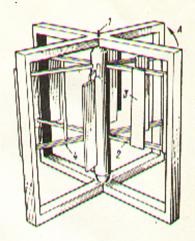
Для преобразования кинетической энергии воздушного потока в механическую энергию могут быть использованы ветродвигатели различных типов (рис.1.6-1.9).
 |
 |
||
Рис.1.6. Карусельный ветродвига- Рис.1.7. Модель карусельного ветродви-
тель, 1- шторка гателя, 1- вертикальная ось, 2- горизонтальные планки, 3 - поварачивающие лопасти, 4 - ось лопасти
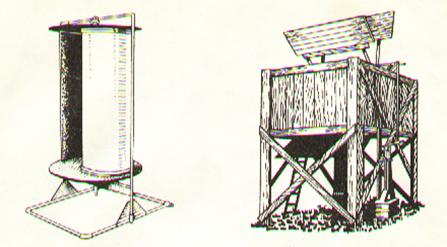 |
Рис.1.8. Ветродвигатель карусельного и барабанного типов
Для преобразования кинетической энергии воздушного потока в механическую энергию используватся ветродивигатели различных типов (рис. 1.6-1.9). Для преобразования кинетической энергии в электрическую используются ветроэнергетические установки. например, типа “Whisper”, “Aero- Cruft”.
 |
Рис.1.9. Ветродвигатель (роторный), система Дарье, 1- лопасти, 2- вал
Основным механизмом, который преобразует энергию ветра в электричество является ветротурбина. Она состоит гораздо большего числа деталей, чем другие виды турбин. Ветер вращает лопасти прикрепленные ко втулке, которая вращается вмести сними. Таким образом, лопасти и втулка вмести образуют ротор. Генератор вращается и вырабатывает электричество. Есть даже контроллер, который запускает и останавливает лопасти турбины, Генератор, контроллер и другие устройства находятся в футляре за лопастями. Анемометр определяет скорость ветра и передает эту информацию в контроллер.
Ветряки начинают вращаться, когда ветер достигает скорости 15-23 км/час и автоматически останавливаются, когда она превышает 100 км/час, чтобы предохранить механизм от повреждений. Некоторые модели ветряков вращаются с постоянной скоростью независимо от силы ветра. Скорость некоторых новых моделей ветряков меняется вместе со скоростью ветра, делая их более эффективными.
В основном у ветряков 2 или 3 веерообразные лопасти. Небольшие турбины вырабатывают менее 100 кВт. Они могут использоваться в дополнение фотоэлектрическим панелям. Лопасти такого «домашнего» ветряка имеют размер 2-8 м и располагаются на высоте около 40 метров и он может обеспечить энергией малое предприятие.
Среди больших ветряков наиболее распространенными являются турбины мощностью от 750 кВт до 2 МВт, которые также располагаются ветряных электростанциях.
Мощные мегаваттные турбины имеют гигантские размеры. Новые модели способны производить от 2 до 5 МВт. Их обычно устанавливают недалеко от берега в воде так, чтобы высокий морской ветер мог вращать их. Эти ветряки уже используются такими странами, как Великобритания, Германия, Дания и Нидерланды. В планы Великобритании входит построение 18-ти ветряных электростанций в своих прибрежных районах.
1.4. Трансформаторы
Трансформатором называется статический электромагнитный аппарат, преобразующий электрическую энергию переменного тока с одними параметрами в электрическую энергию переменного тока с другими параметрами. Меняющимися параметрами могут быть: ток, напряжение, число фаз, форма кривой напряжения (в специальных трансформаторах - частота).
В устройствах электропитания трансформатор чаще всего применяется для преобразования переменного напряжения одной величины в переменное напряжение другой величины. По мощности трансформаторы бывают силовыми (на мощность от единиц кВА до сотен кВА) и маломощными (от единиц ВА до единиц кВА). Маломощные трансформаторы применяются в аппаратуре связи и радиоаппаратуре в качестве согласующих или разделительных трансформаторов или для преобразования напряжения или тока. Силовые трансформаторы применяются в цепях питания радиопредприятий и предприятий проводной связи.
Трансформатор - это аппарат переменного тока и на постоянном токе не работает!
Любой трансформатор состоит из двух основных элементов - замкнутого стального сердечника и обмоток, намотанных медным проводом. Сердечник трансформатора делается из пластин специальной электротехнической стали. Толщина этих пластин зависит от рабочей частоты трансформатора, чем больше частота, тем тоньше пластины. По форме сердечника и способу расположения на нём обмоток трансформаторы бывают стержневые, броневые (Ш-образные), ториодальные и ленточные разрезные. По схемному исполнению (т.е. по числу обмоток) трансформаторы бывают одно-, двух- и многообмоточные. Обмотка, включённая в сеть источника электрической энергии, называется первичной, а обмотка, включённая в сеть приёмника энергии (потребителя), называется вторичной. Первичная обмотку трансформатора есть только одна, а вторичных может быть несколько. Однообмоточный трансформатор называется автотрансформатором (пример - бытовой трансформатор в стабилизаторе для ТВ). У него вторичной обмоткой служат отпайки от первичной обмотки. В нём между первичной и вторичной сторонами есть и магнитная и электрическая связь. Двухобмоточный трансформатор имеет одну первичную и одну вторичную обмотки. Они электрически изолированы друг от друга. Многообмоточный трансформатор имеет одну первичную и несколько вторичных обмоток, причём все обмотки электрически не связаны между собой.
По рабочей частоте трансформаторы условно можно разделить на трансформаторы:
- пониженной частоты (ниже 50 Гц);
- промышленной частоты (50 Гц);
- повышенной частоты (100 Гц - 10 кГц);
- высокой частоты (выше 10 кГц).
По числу фаз трансформаторы бывают однофазные (рис. 1.10) и многофазные (трёхфазные, шестифазные и т.д.). Число фаз первичной обмотки определяется числом фаз источника электрической энергии, а число фаз вторичной обмотки определяется назначением трансформатора в схеме. По напряжению трансформаторы бывают низковольтные (напряжение любой его обмотки меньше 1000 В) и высоковольтные (напряжение хотя бы одной выше 1000 В).
 |
Конструкция трансформаторов
Основными частями трансформатора являются стальной замкнутый сердечник (магнитопровод) и намотанные на нём обмотки. Сердечники бывают: стержневыми, броневыми, тореоидальными, ленточными разрезными (рис. 1.11).
 |

Те части сердечника, на которые одеваются обмотки, называются стержнями, а те части, которые служат для замыкания магнитной цепи и не несут обмоток, называются ярмом (рис. 1.12). В стержневых однофазных трансформаторах обмотки одеваются на оба стержня (половина каждой обмотки на один и половина на другой). В броневых (Ш - образных) однофазных трансформаторах обе обмотки одеваются на средний стержень, а в трёхфазных первичная и вторичная обмотка каждой фазы одевается на свой стержень. Тореодальные трансформаторы делаются только однофазными и малой мощности. Материалом сердечников служат пластины специальной электротехнической (трансформаторной) листовой стали марок Э-41, 42 и т.д. Толщина листов зависит от частоты трансформатора. Для трансформаторов, работающих на частоте f=50 Гц, используются листы стали толщиной 0,5 или 0,35 мм, а для трансформаторов, работающих на более высоких частотах, используются листы стали толщиной от 0,2 до 0,08 мм.
ленточный разрезной
Так как трансформаторы работают на переменном токе, то в стальных сердечниках наводятся вихревые токи (токи Фуко), которые ведут к потерям энергии в стали трансформатора. Чтобы уменьшить эти потери сердечники делают не цельнометаллическими, а набирают из тонких пластин, причём эти пластины с одной стороны покрывают слоем лака (или наклеивают тонкую бумагу), чтобы изолировать их друг от друга.
Стержневые сердечники собираются из отдельных пластин прямоугольной формы.
Броневые сердечники набирают из штампованных Ш-образных пластин. Торроидальные сердечники делают для маломощных трансформаторов (десятки Вт) повышенной частоты. Ленточные разрезные по форме подобны броневым.
По коэффициенту трансформации напряжения трансформаторы делят на понижающие и повышающие.
Принцип действия трансформаторов
Рассмотрим его на примере двухобмоточного стержневого трансформатора (рис. 1.13)
Принцип действия трансформатора основан на электромагнитном взаимодействии двух или нескольких электрически не связанных между собой и неподвижных обмоток. Обмотки характеризуются числом витков W1 и W2.
Для трансформатора существуют три режима работы: холостой ход, рабочий режим и короткое замыкание. Рассмотрим последовательно – эти режимы.
 |
1.13. Принцип действия трансформатора
1.5. Режимы работы трансформатора
Холостой ход трансформатора
Холостой ход - такой режим работы трансформатора, когда первичная обмотка подключена к источнику переменного тока, а вторичная - разомкнута, т.е. ток вторичной обмотки равен нулю. Предположим, что напряжение U1 изменяется по синусоидальному закону. Под его действием по первичной обмотке (с числом витков W1) протекает синусоидальный ток I1 = I0, равный току холостого хода. Величина тока I0 зависит от мощности трансформатора; в трансформаторах малой мощности (десятки ВА) он достигает 25-30% от номинального значения тока I1, а в трансформаторах большой мощности – от 3 до 10% от него. Под действием I1 возникает намагничивающая сила F0=I0W1, которая создаёт в трансформаторе магнитный поток Ф. Большая часть его замыкается по сердечнику трансформатора и образует основной магнитный поток Ф0, пронизывающий все витки первичной обмотки (с числом витков W1) и вторичной обмотки (с числом витков W2). Небольшая часть потока Ф замыкается по воздуху вокруг первичной обмотки и образует поток рассеяния Ф1s сцеплённый только с первичной обмоткой W1.
Этот поток Ф1s индуктирует в первичной обмотке ЭДС рассеяния
![]() . (1.8)
. (1.8)
А основной магнитный поток Ф0 индуктирует в первичной и вторичной обмотках ЭДС
![]() (1.9)
(1.9)
![]() (1.10)
(1.10)
Если считать поток Ф0 синусоидальным, т.е. Ф0=Ф0msinwt, то индуктируемые ЭДС согласно (1) и (2) запишутся следующим образом:
е1 = - W1 ωФ0m cos ωt=ωW1 Ф0m sin (wt -π/2) (1.11)
e2 = - W2 ωФ0m cos ωt=ωW2 Ф0m sin (wt -π/2), (1.12)
где ωW1Ф0m = E1m, ωW2Ф0m = E2m.
То есть е1 и е2 тоже меняются по синусоидальному закону, но отстают по фазе от Ф0 на угол π/2. На практике принято оперировать не мгновенными, а действующими значениями ЭДС, они определяются по формуле:
 (1.13)
(1.13)
![]() ,
(1.14)
,
(1.14)
аналогично
![]() (1.15)
(1.15)
Из (1.9) и (1.10) видно, что ЭДС первичной и вторичной обмоток прямо пропорциональны числу витков этих обмоток, т.е. чем больше будет число витков, тем больше будет ЭДС обмотки. Трансформатор принято характеризовать отношениями W1/W2 = E1/E2 = n, которое называется коэффициентом трансформации. Он показывает, во сколько раз различаются между собой ЭДС первичной и вторичной обмоток. Обмотка, имеющая большее число витков, называется обмоткой высшего напряжения, а обмотка, имеющая меньшее число витков, называется обмоткой низшего напряжения. Если W1 > W2, то трансформатор называется понижающим, если W1 £ W2 - повышающим. Так как трансформатор потребляет из сети электрическую мощность, а не создаёт её, то электрическая мощность, взятая из сети S1 = U1I1 всегда больше, либо равна электрической мощности на вторичной стороне трансформатора S2 = U2I2, т.е. S2 £ S1. Поэтому, чем больше напряжение на обмотке трансформатора, тем меньше в ней может быть ток, т.е.
 (1.16)
(1.16)
Если пренебречь потерями энергии в первичной обмотке трансформатора и в
сердечнике и считать, что весь созданный магнитный поток Ф замыкается по
сердечнику, то ЭДС Е1 по закону Ленца будет равна по величине и
противоположна по знаку приложенному напряжению U1,
то есть –É1=Ú1. Но на практике нельзя
пренебрегать потерями мощности в сердечнике и рассеянием магнитного потока.
Поэтому в реальном трансформаторе ток холостого хода I0
имеет две составляющие - активную I0a, которая тратиться на потери мощности в сердечнике
трансформатора (на гистерезис и вихревые токи) и реактивную I0p, которая тратится на создание в сердечнике основного
магнитного потока Ф0, то есть:
İ0 = İ0a + İ0p (1.17)
Кроме того, первичная обмотка реального трансформатора обладает активным сопротивлением r1, на котором под действием тока İ0 будет падать напряжение Ū0a=İ0r1. Кроме того, из-за наличия потока рассеяния Ф1s в первичной обмотке наводится ЭДС рассеяния Ė1s = - jx1İ0 , где х1 - фиктивное сопротивление, называемое индуктивным сопротивлением рассеяния первичной обмотки. По второму закону Кирхгофа приложенное напряжение Ú1 должно уравновешиваться геометрической суммой всех падений напряжения в первичной цепи трансформатора, т.е.
Ū1= -Ė1-Ė1s + İ0r1 = -Ė1+r1İ0 + jx1İ0 и Ū2 = Ė2 (1.18)
На основании полученного соотношения можно построить векторную диаграмму трансформатора в режиме холостого хода (рис1.14). Построение векторной диаграммы начнём с откладывания вектора магнитного потока Ф0 в горизонтальном направлении. Так как мы рассматриваем случай синусоидального идеального потока, то индуктируемые им ЭДС Ė1 и Ė2 отстают от потока по фазе на 90° (так как меняются по знаку cos). За положительное направление вращения принимается вращение против часовой стрелки. Реактивная составляющая тока - İ0p совпадает по направлению с Ф0, а активная составляющая İ0а – опережает Ф0 на 90°. İ0 определяется как геометрическая сумма (İ0а + İ0p). Угол между Ф0 и İ0 называется углом магнитного запаздывания или магнитных потерь и зависит от величины потерь в стали сердечника. Вектор потока рассеяния Ф1s совпадает по направлению с İ0, а Ė1s отстаёт от него на 90°. Далее пользуемся уравнением (1.18).
От точки 0 откладываем вектор –Ė1, к его концу пристраиваем вектор İ0r1 параллельный вектору İ0, а к концу его пристраиваем вектор –Ė1s=jx1İ0. Затем проводим вектор Ū1 от точки 0 до конца вектора – Ė1s. Из векторной диаграммы видно, что режиме холостого хода векторы Ė1 и Ė2 сдвинуты относительно Ū1 на угол близкий к 180°. В (1.18) можно обозначить r1 + jx1 = z1 , тогда
Ū1= - Ė1+z1İ0 (1.19)
Модуль этого
комплексного сопротивления z1=![]() - полное
сопротивление первичной обмотки. В (1.19) можно заменить -Ė 1 =
İ0z0, где z0 – полное сопротивление, вносимое стальным
сердечником, причём, так как İ0 отстаёт по фазе от – Ė1,
то сопротивление z0 имеет не только активную
(r0), но и индуктивную составляющую (х0),
т.е. z0 = r0 +
jx0.
- полное
сопротивление первичной обмотки. В (1.19) можно заменить -Ė 1 =
İ0z0, где z0 – полное сопротивление, вносимое стальным
сердечником, причём, так как İ0 отстаёт по фазе от – Ė1,
то сопротивление z0 имеет не только активную
(r0), но и индуктивную составляющую (х0),
т.е. z0 = r0 +
jx0.

Энергия, выделяемая в х0 и в r0 затрачивается на создание основного магнитного потока в сердечнике и на покрытие возникающих в нём потерь. С учётом этого (1.19) преобразуется в равенство вида Ū1=İ0z1+İ0z0=İ0(z1+z0). На основании этого уравнения строится эквивалентная схема замещения трансформатора в режиме холостого хода (рис.1.15).
Рис.1.15. Схема опыта холостого хода и её
эквивалентная схема


Для определения параметров трансформатора делается опыт холостого хода. Так у большинства трансформаторов в режиме холостого хода потери в первичной обмотке малы, а во вторичной - равны 0, то можно считать, что Ė1 » Ū1, а Ė2 = Ū2. Таким образом, режим холостого хода трансформатора позволяет определить коэффициент трансформации n»U1/U2, потери в стали (иначе потери холостого хода или постоянные потери) и входное сопротивление при холостом ходе z0 и z1.
Ū1= -Ė1 + Ės1 + Ė1 + I0r1 = -Ė1 + r0I0 + jxI0
Ū2 = E2
r1≠ jx1=z1
Ū1= -Ė1 + Ės1
Ū1= -Ė1 + z1I0
z1=![]() - полное
сопротивление.
- полное
сопротивление.
Рабочий режим трансформатора
Если к вторичной обмотке трансформатора подключить нагрузку, то трансформатор будет работать в рабочем режиме (рис.1.16). В этом режиме физические процессы в трансформаторе зависят от характера нагрузки. Будем рассматривать два основных случая активно-индуктивной и активно - ёмкостной нагрузки.

Если к первичной обмотке подвести напряжение Ū1, а вторичную замкнуть на нагрузку, то по обеим обмоткам потекут токи İ1 и İ2 соответственно. Они наведут в трансформаторе магнитные потоки Ф1s и Ф2s, которые большей частью замкнутся по сердечнику трансформатора, а небольшая их часть замыкается по воздуху вокруг обмоток, образуя потоки рассеяния Ф1 и Ф2. Эти потоки наведут в трансформаторе в обмотках трансформатора ЭДС рассеяния Ė1s и Ė2s ,которые тратятся на индуктивные сопротивления рассеяния х1 и х2, первичной и вторичной обмоток, то есть
Ė1s=-jİ1x1 (1.20)
Ė2s=-jİ2x2 (1.21)
В этом случае уравнения равновесия для нагруженного трансформатора будут иметь вид
|
Ū1=-Ė1-Ė1s+İ1r1= -Ė1+jİ1x1+İ1r1 (1.22) |
|
Ū2=Ė2+Ė2s-İ2r2=Ė2-jİ2x2-İ2r2 (1.23) |
Так как причиной появления потока Ф2 служит поток Ф1, то по закону Ленца они направлены встречно, то есть в сердечнике трансформатора появляется суммарный результирующий поток, который и служит источником ЭДС Ė1 и Ė2. Если ток нагрузки İ2 увеличится, то Ф2 - возрастёт, тогда Ф - уменьшится, а значит Ė1 и Ė2 тоже уменьшится. Из уравнения (1.22) видно, что для сохранения равенства при уменьшении Ė1 должен увеличится İ1, а это увеличит поток Ф1 и суммарный поток Ф. Причём İ1 будет увеличиваться до тех пор, пока не скомпенсирует размагничивающее действие потока Ф2, то есть восстановится величина Ф. Если İ2 начнёт уменьшаться (вплоть до 0), то Ф будет расти, и соответственно, возрастут Ė1 и Ė2. Но при росте Ė1 (из равенства (1.22)) начинает уменьшаться İ1, то есть Ф1 и соответственно, поток Ф станет равным Ф0. Таким образом, суммарный магнитный поток в трансформаторе практически остаётся неизменным в широких пределах изменения нагрузки и равным потоку холостого хода, то есть
Фхх = Ф1-Ф2 = Ф0 (1.24)
Это значит, что намагничивающая сила, создающая этот поток тоже будет неизменной, а она определяется формулой F0 = İ0Ẃ1, F0 -намагничивающая сила холостого хода трансформатора.
При работе трансформатора под нагрузкой в его магнитопроводе действует два потока Ф1 и Ф2, созданные намагничивающей силой первичной и вторичной обмоток, причём F1=İ1×W1, a F2=İ2W2. Тогда суммарная намагничивающая сила Fн = F1+F2= İ1×W1+ İ2×W2.
Так как суммарная намагничивающая сила Fн =F0, то можно записать, что
İ0×W1= İ 1×W1+ İ 2×W2 (1.25)
Это уравнение называется уравнением равновесия намагничивающих сил. Таким образом, при работе трансформатора под нагрузкой подразумеваем два электрически независимых контура первичной и вторичной сети, описываемые уравнениями (1.22) и (1.23). На основании их можно построить векторную диаграмму и эквивалентную схему трансформатора. Но при этом необходимо сравнивать величины, относящиеся к первичной и вторичной цепям. Если коэффициент трансформации n¹1 (не равен 1), то эти величины будут различными. Для удобства построения векторных диаграмм и эквивалентных схем принято вторичную обмотку трансформатора приводить к первичной, то есть условно считать, что есть обмотка с числом витков, равным числу витков первичной обмотки, тогда E’2=E1= nE2=E2 (W2/W1).
Уравнение (1.25) можно разделить на W1, и тогда оно примет вид I0=I1+I2W1/W2, а I2=W2/W1 =1/n I2 = I′2, приведённый к первичной цепи. В этом случае электромагнитную связь между обмотками можно заменить чисто электрической. Тогда можно найти полное, активное и индуктивное сопротивление трансформатора. Построение векторной диаграммы начинаем с вектора Ф0.
Построим векторную диаграмму для случая активно-индуктивной нагрузки. Затем откладываем вектора İ0 и Ė1 = Ė2. Затем ищем вектор İ1, который согласно (1.25) равен İ1=İ0-İ .При активно - индуктивной нагрузке İ2 отстаёт от вектора Ė¢2 на некоторый угол ЭДС рассеяния Ė¢2s, приведенная к первичной сети отстаёт от İ¢2 на 90°. При приведении параметров вторичной цепи к первичной соблюдается условие, чтобы все потери мощности и фазовые углы между электрическими величинами оставались после приведения неизменными. Активное сопротивление приведённой вторичной обмотки определяется из условия I22r2 = (I¢2)2 r¢2 =(I2/n)2r. Откуда r2=n2r2. Индуктивное сопротивление обмотки пропорционально квадрату числа витков, откуда x¢2 =W1/W2 x2 = n2 x2 .
Уравнение равновесия для первичной обмотки запишется в виде
|
Ūk= -Ė1 +jx1İ1+İ1r1 (1.26)
|
|
То есть переносим I1= -I’2 и строим диаграмму (рис.1.17).
ЭДС Ė1s отстаёт от потока, её вызвавшего, на 90°, а этот поток направлен по направлению İ1. Определим Ū2, для этого, согласно (1.23) вектор Ė2 сложим с Ė2s и вычтем из них İ2r2.
 |
Рис. 1.17. Векторная диаграмма трансформатора в режиме нагрузки
Зная направление İ1, согласно (1.22) откладываем вектор
Ė1,
складываем его с İ1r1, затем вычитаем Ė1s и
получим Ū1.![]() Из векторной диаграммы видно, что
величина вторичного напряжения Ū2 зависит от тока нагрузки İ2
и от характера нагрузки (то есть y). При активно-индуктивной
нагрузке Ū2 по абсолютной величине меньше ЭДС Ė2
(êŪ¢2 ê<êĖ¢2ê), а при активно-ёмкостной нагрузке êŪ¢2
ê> êĖ¢2 ê, то есть напряжение Ū2 повышается.
Из векторной диаграммы видно, что
величина вторичного напряжения Ū2 зависит от тока нагрузки İ2
и от характера нагрузки (то есть y). При активно-индуктивной
нагрузке Ū2 по абсолютной величине меньше ЭДС Ė2
(êŪ¢2 ê<êĖ¢2ê), а при активно-ёмкостной нагрузке êŪ¢2
ê> êĖ¢2 ê, то есть напряжение Ū2 повышается.
Эквивалентную схему нагруженного трансформатора можно построить, анализируя основные уравнения равновесия (рис.1.18). Запишем их в виде:
|
Ū1 = -Ė1+ İ1z1 |
(1.27)
|
|
Ū2 = Ė2 - İ2z2, |
(1.28)
|
где z1 и z2 полные сопротивления первичной и приведённой вторичной обмоток.
Обозначим Ė1 = Ė2 = -İ0z0, где İ0 - вектор тока холостого хода, z0 - полное сопротивление намагничивающего контура. Напряжение вторичной обмотки трансформатора при нагрузке равно Ū2=İ¢2Z¢н, где Z¢н=n2Zн - полное приведённое сопротивление внешней нагрузки. Из уравнения равновесия имеем, что İ¢2=İ0-İ1.Тогда уравнение равновесия ЭДС для вторичной обмотки трансформатора примет вид
(İ0-İ1)∙Z¢н = -İ0∙z0 + (İ1-İ0)∙Z¢2, (1.29)
тогда ток холостого хода
(Z2+Zн)/(Z0+Z2+Zн)I0=I1. (1.30)
Подставим значение его в (1.27) и получим выражение вида
Ū1 = İ0∙z0 + İ1∙z1 = İ1∙z1 + z0∙(Z¢0+Z¢2+Z¢н)/(Z¢2+Z¢н), (1.31)
тогда эквивалентное сопротивление трансформатора под нагрузкой имеет вид
Zэ = Z1 + Z0∙(Z2+Zн)/(Z0+Z2+Zн), (1.32)
то есть состоит из двух последовательно сопротивлений, где z1 - полное сопротивление первичной обмотки, а второе слагаемое – параллельное включение z0 - (намагничивание контура) и полного сопротивления вторичной цепи (то есть последовательного включения полного сопротивления вторичной обмотки и нагрузки трансформатора).
Короткое замыкание трансформатора
Короткое замыкание трансформатора имеет место, если вторичную обмотку замкнуть накоротко, а первичная будет включена в сеть. В эксплуатационных условиях короткое замыкание является аварийным режимом и сопровождается очень большими бросками тока. При этом сильно нагреваются обмотки, и на них действуют большие механические усилия, деформирующие обмотки.
Но для трансформаторов делается опыт короткого замыкания. Он делается для определения параметров трансформатора при любой нагрузке. В этом опыте вторичная обмотка замкнута накоротко, а к первичной подводят пониженное напряжение Uk, при котором в обмотках трансформатора появляются номинальные токи. Это номинальное напряжение называется напряжением короткого замыкания и измеряется в % от номинального, то есть
![]() (1.33)
(1.33)
Согласно действующему стандарту, ![]() . Так как значение Uk
очень мало, то намагничивающий ток I0 и соответственно магнитный поток Ф0
незначительны, то есть I0k » 0, при этом намагничивающая сила
первичной обмотки тратится на компенсацию намагничивающей силы вторичной
обмотки. Если пренебречь намагничивающим током (то есть İ0k
=0), то уравнение магнитного
равновесия примет вид İ1W1 +
İ2W2 =
0, и если считать
трансформатор приведённым, то İ1
= -İ2.
. Так как значение Uk
очень мало, то намагничивающий ток I0 и соответственно магнитный поток Ф0
незначительны, то есть I0k » 0, при этом намагничивающая сила
первичной обмотки тратится на компенсацию намагничивающей силы вторичной
обмотки. Если пренебречь намагничивающим током (то есть İ0k
=0), то уравнение магнитного
равновесия примет вид İ1W1 +
İ2W2 =
0, и если считать
трансформатор приведённым, то İ1
= -İ2.
Уравнение равновесия вторичной обмотки примет вид
Ū¢2=Ė¢2-İ¢2z¢2=0 (1.34)
то есть
Ė¢2= İ¢2(r¢2+jx¢2) (1.35)
Ток İ¢2, протекающий по вторичной обмотке, отстаёт от Ė¢2 на угол y2к, который определяется из условия, что
–X2/r2 tgy2к = π/2 (1.36)
Можно построить векторную диаграмму трансформатора в режиме короткого замыкания (рис. 1.19). Отложим по оси абсцисс вектор потока Фmкз, от него на отстают вектора Ė1=Ė′2, от Е¢2 отстаёт на угол y2к вектор İ¢2, причём
Ė¢2 = İ¢2r¢2 + jx¢2 İ¢2 (1.37)
Эквивалентная схема трансформатора при коротком замыкании строится из следующих соображений: из (1.37) следует, что
Ė1= -Ė’2= -(İ’2r’2+jİ’2x’2), (1.38)
тогда
Ūk=İ1r1+jx1İ1-İ’2r2-jx2İ’2=İ1×(r1+jx1+r’2+jx’2). (1.39)
 |
Рис. 1.19. Векторная диаграмма
трансформатора в режиме короткого замыкании
Так как I0=0, то z0=¥, а zн=0, тогда эквивалентная схема примет вид
 (рис. 1.20):
(рис. 1.20):
Сопротивление трансформатора короткому замыканию zk=r1+jx1+r2+jx2, откуда определим активную и индуктивную составляющие сопротивления трансформатора при коротком замыкании
rk=r1+r¢2,
xk=x1+x¢2,
![]()
Эти сопротивления определяют потери в обмотках трансформатора и называются потерями в меди трансформатора Рм, так как при коротком замыкании текут номинальные токи I1 и I2, а вся мощность трансформатора тратится на нагрев обмоток, так как I0=0, Ф0=0, то есть потери в стали равны нулю.
1.6. Автотрансформаторы
 У обычного трансформатора обязательно есть
не менее двух обмоток, имеющих только электромагнитную связь. А автотрансформатор -
это
электростатический аппарат, имеющий одну обмотку, часть
которой одновременно принадлежит и первичной и вторичной сетям.
Автотрансформатор бывает повышающим и понижающим. Покажем
его на схеме (рис. 1.21):
У обычного трансформатора обязательно есть
не менее двух обмоток, имеющих только электромагнитную связь. А автотрансформатор -
это
электростатический аппарат, имеющий одну обмотку, часть
которой одновременно принадлежит и первичной и вторичной сетям.
Автотрансформатор бывает повышающим и понижающим. Покажем
его на схеме (рис. 1.21):
Кроме электромагнитной связи первичная и вторичная обмотки автотрансформатора имеют и электрическую связь. У понижающего автотрансформатора первичной обмоткой служит вся обмотка (А+Х) с числом витков W1, вторичной - только её часть (a+Х) с W2 (W1>W2). У повышающего автотрансформатора, наоборот, первичной обмоткой является часть всей обмотки (А-Х) с W1, а вторичной служит вся обмотка (а - Х) с W2 (W1<W2). Назовём начала обмоток – А, а конец - Х.
Рассмотрим для примера понижающий автотрансформатор. Первичное напряжение U1 подключено к зажимам А-Х первичной обмотки. При холостом ходе (I2=0, Zн=¥). Пренебрегая потерями в первичной обмотке, уравнения равновесия ЭДС можно записать в виде:
для первичной обмотки: U1 = Е1 = 4,44∙W1∙f∙Фm (1.40)
для вторичной обмотки: U2 = Е2 = 4,44∙W2∙f∙Фm (1.41)
Отношение напряжения первичной и вторичной обмоток при холостом ходе носит название коэффициента трансформации автотрансформатора.
![]() (1.42)
(1.42)
Если вторичную обмотку подключить к нагрузке Zн, то по вторичной цепи потечёт ток I2 (I1 и I2 всегда направлены встречно). Потери мощности в автотрансформаторе меньше, чем в обычном трансформаторе, поэтому, если ими пренебречь, то можно принять U1I1=U2I2, откуда
![]() (1.43)
(1.43)
То есть для автотрансформатора сохраняются все основные соотношения, действительные для трансформатора.
Так как при неизменённом напряжении сети поток постоянный, то уравнение магнитного равновесия автотрансформатора имеет вид:
İ1W1 + İ2W2 = İ0W1. (1.44)
По части обмотки а-Х течёт ток İ12, равный геометрической разности токов первичной и вторичной цепи, то есть İ12 = İ1 – İ2.
Если пренебречь током холостого хода (İ0=0) и учесть, что İ1 и İ2 находятся в противофазе, то их геометрическая сумма равна арифметической разности, то есть
İ12 = İ2 - İ1 = İ2![]() .
(1.45)
.
(1.45)
В понижающем автотрансформаторе I2>I1 и I12 совпадает по направлению с I2, а в повышающем - наоборот, совпадает с I1.
Автотрансформаторы имеют ряд преимуществ и недостатков. Преимуществом перед трансформатором является то, что при одинаковой полезной мощности у автотрансформатора меньший расход стали и обмоточного провода (так как по части обмотки а-Х всегда течёт разность токов, то её можно делать из более тонкого провода), меньшие потери мощности, более высокий КПД, меньшее изменение напряжения при изменениях нагрузки .Эти преимущества тем больше, чем ближе к 1 коэффициент трансформации, поэтому обычно автотрансформатор применяют при коэффициенте трансформации не более 2.
В автотрансформаторе мощность передаётся от первичной обмотки к вторичной не только электромагнитным, но и чисто энергетическим путем за счёт непосредственной электрической связи между обмотками. Это создаёт и ряд недостатков автотрансформатора, к которым относятся:
1) возможность перехода высшего напряжения в сеть низшего, так как между обмотками есть непосредственная электрическая связь; из-за этой связи нельзя применять автотрансформатор, если приёмник энергии имеет заземлённый полюс (в выпрямительных устройствах);
3) автотрансформатор имеет малое сопротивление короткого замыкания, то есть токи короткого замыкания будут намного больше, чем у трансформаторов.
КПД трансформатора
Потребляемая трансформатором из сети активная мощность Р1 не равна мощности Р2, которая отдаётся в нагрузку. Это происходит потому что часть Р1 тратится на создание магнитного потока, то есть на потери в стали (Рст) часть тратится на нагревание обмоток, то есть на потери в меди (Рм), а что остаётся, идёт в нагрузку. Причём потери в стали равны потерям холостого хода и являются величиной постоянной, а потери в меди зависят от тока нагрузки и пропорциональны I122, то есть являются потерями переменными.
КПД трансформатора – это отношение мощности, отдаваемой трансформатором в нагрузку, к мощности потребляемой им из сети, то есть
n = Р2/Р1 (1.46)
Часто КПД определяют в процентах, тогда
n (%) =( Р2/Р1) 100 (1.47)
Другими словами
 (1.48)
(1.48)
Потери в стали не
являются постоянными, а зависят от величины нагрузки. Взяв отношение ![]() , получим коэффициент нагрузки трансформатора,
который
показывает насколько нагружен трансформатор относительно номинальной нагрузки
(I1н). Рассмотрим зависимость n = f (b) (рис. 1.22). Из неё видно, что КПД трансформатора будет максимален при такой
нагрузке, когда постоянные и ременные потери равны. Обычно при проектировании стараются сделать так, чтобы максимальны КПД был при номинальной нагрузке или
при близкой к ней.
, получим коэффициент нагрузки трансформатора,
который
показывает насколько нагружен трансформатор относительно номинальной нагрузки
(I1н). Рассмотрим зависимость n = f (b) (рис. 1.22). Из неё видно, что КПД трансформатора будет максимален при такой
нагрузке, когда постоянные и ременные потери равны. Обычно при проектировании стараются сделать так, чтобы максимальны КПД был при номинальной нагрузке или
при близкой к ней.
Измерительные трансформаторы
Часто бывает неудобно измерять очень большие токи и напряжения, так как при этом сложно сделать измерительные приборы и сложно их обслуживать. Для расширения пределов измерения переменных токов и напряжений и для изоляции измерительных приборов от высокого напряжения существуют измерительные трансформаторы тока и напряжения.
Трансформаторы тока
Они преобразуют переменный ток большой величины (до 40 кА) в ток малой и рассчитываются так, чтобы при любом токе первичной обмотки ток во вторичной обмотке не превышал 5 А (рис. 1.23). По величине первичного тока ГОСТ предусматривает 40 градаций: от 1 А до 40 кА. Номинальный ток вторичной обмотки может быть 1 А, 2 А, 2.5 А, 5 А. Причём вторичных обмоток может быть несколько. На схеме трансформатор тока обозначается как показано на рис.1.23.

Первичная обмотка (Л1 - Л2) состоит из одного или нескольких витков провода очень большого сечения и включаются последовательно в цепь нагрузки. Вторичная, в которой измеряется ток обмотка (U1 - U2) делается с большим числом витков из проводов малого сечения и замыкается на амперметр или последовательную катушку другого прибора (счётчика, ваттметра и т.д.), имеющую малое сопротивление. То есть трансформатор тока работает в режиме, близком к короткому замыканию. Его магнитная система неуравновешена. Если при изменении тока (Л1 - Л2) разорвётся цепь вторичной обмотки, то есть I2=0, а I1 не уменьшается, то в магнитной цепи возникнет огромный поток, который вызовет недопустимый перегрев сердечника и опасную для жизни и целости изоляции ЭДС во вторичной обмотке. Чтобы обезопасить обслуживание, вторичные обмотки трансформатора тока заземляют. Нельзя размыкать вторичные обмотки работающего трансформатора. Приборы в цепь U1-U2 включаются так чтобы положительное направление тока в приборе совпадало с положительным направлением тока в контролируемой цепи.
Трансформаторы напряжения
Это обычные трансформаторы малой мощности, первичная обмотка которых (А-Х) с большим числом витков подключаются к двум линейным проводам измеряемой сети, а вторичная обмотка (а-Х) подключается к вольтметру или другому прибору, имеющему большое сопротивление (рис.1.24).


Коэффициент трансформации выбирается таким, чтоб при номинальном напряжении сети напряжение вторичной обмотки было не более 100 В или 200 В. Трансформаторы напряжения должны включаться так чтобы на прибор подавалось вторичное напряжение, совпадающее по фазе с первичным напряжением. Так как сопротивление в цепи вторичной обмотки достаточно велико, можно считать, что трансформатор напряжения работает в режиме, близком к холостому ходу, то есть ток вторичной обмотке близок к 0. Таким образом, напряжения первичной и вторичной обмоток численно равные ЭДС этих обмоток различаются в коэффициент трансформации раз. Зная коэффициент трансформации, можно по показаниям вольтметра определить U1. Если ток во вторичной цепи увеличится, то изменится U2, и уменьшится точность измерения, за счёт падения напряжения во вторичной цепи. Так как первичная обмотка этого трансформатора включена в высоковольтную цепь, и возможен пробой в сеть низкого напряжения вторичную обмотку трансформатора напряжения при работе заземляют.
Трансформаторы с регулируемым напряжением
Часто бывает нужно в различных схемах иметь возможность регулировать напряжение. Удобнее всего это делать, меняя число витков вторичной обмотки трансформатора или автотрансформатора. Для этого на ней делают несколько отводов и переключателем меняют число витков, а, следовательно, и вторичное напряжение трансформаторов.
Недостатками такого способа являются:
1. ступенчатая регулировка, что не всегда бывает достаточно;
2. необходимость отключения трансформатора от сети при переключениях, иначе, если регулировать напряжение под нагрузкой, то при изменении числа витков обмотки трансформатора часть их оказалась бы замкнутой накоротко, то есть в них возникли бы очень большие токи, и трансформатор мог выйти из строя.
Для плавной регулировки напряжения без отключения нагрузки существует ЛАТР, его витки оголены и по ним перемещается угольная щётка, которая одновременно перекрывает не более двух проводников, то есть замыкает накоротко только один виток (рис.1.25). Так как переходное сопротивление между щёткой и этим витком велико, то ток короткого замыкания в нём ограничен. Кроме ЛАТР плавно регулировать напряжение можно трансформатором Норриса, с подвижной короткозамкнутой катушкой. Он имеет удлинённый стальной сердечник с узким длинным окном и чаще всего выполняется по схеме автотрансформатора. На сердечнике размещена обмотка, состоящая из двух встречно намотанных катушек I и II с одинаковым числом витков. Одна из катушек, (пусть I) является вторичной обмоткой трансформатора. Так как катушки намотаны встречно, то они создают встречно направленные потоки ФI и ФII, которые замыкаются через воздух в x средней части окна сердечника.

Короткозамкнутая катушка К одета поверх катушек I и II и может перемещаться по высоте стержня от крайнего верхнего до крайнего нижнего положения. В среднем положении катушка К не сцеплена с магнитными линиями потоков ФI и ФII и не оказывает на них никакого влияния. Тогда, пренебрегая падением напряжения в сопротивлениях катушек, считаем, что
Ū1 = -ĖI - ĖII, (1.49)
а так как катушки находятся в одинаковых магнитных условиях, то ĖI=ĖII=ŪI /2. Значит вторичное напряжение
Ū2=ĖI=ŪI/2. (1.50)
Если катушка К перемещается вдоль катушки II, она сцепляется с потоком ФII и уменьшает его, то есть уменьшается и ĖII. В крайнем нижнем положении катушки К примем, что ĖII=0, тогда ŪI=ĖI, то есть вторичное напряжение равно первичному
Ū2 = ĖI= ŪI. (1.51)
Если катушка К находится в промежуточной точке между серединой стержня и крайним нижним положением, то полной компенсации потока ФII не будет, ЕII=0, поэтому U2<UI. Таким образом, при нахождении катушки в интервале между средней и крайней нижней точкой стержня U2 регулируется от 0,5×UI до UI. При крайнем верхнем положении ЕI=0, то есть U2 = 0. При перемещении катушки К от крайнего верхнего до среднего положения стержня величина U2 меняется от 0 до 0,5×UI, то есть этим трансформатором можно плавно регулировать напряжение от 0 до UI без снятия нагрузки.
1.7. Трехфазные цепи.
Выще мы говорили об электрической цепи, имеющую синусоидальную ЭДС с частотой f . Ее график показан на рис. 1.26
U
t
Т
Рис. 1.26. Однофазный синусоидальный ЭДС
Но можно создать совокупность электрических цепей, в которых действуют синусоидальные ЭДС одной и той же частоты, создаваемые общим источником электрической энергии, но сдвинутые по фазе относительно друг друга на некоторый угол. Такая совокупность электрических цепей называется многофазной системой. Часть многофазной системы электрических цепей, в которой протекает один из токов многофазной системы токов, называется фазой (рис.1.27).
 U
U
t
Т
Рис. 1.27. Двухфазный синусоидальный ЭДС
В системах электрического питания устройств связи многофазные системы нашли широкое применение, то есть 2-х фазные, 3-х фазные, 6-тифазные и др. Рассмотрим эти системы на примере наиболее рапространенной 3-х фазной системы (рис. 1.28).
Угол сдвига между отдельными фазами многофазной системы всегда делают симметричными, то угол сдвига фаз в них определяется выражением
a = 2π / m (1.52)
где 2π- период питающего напряжения (360˚), а m – число фаз в системе.
Если катушку поместить в
постоянное магнитное поле и начать ее вращать, то в ней образуется ЭДС e = Em·sinωt, где ω-угловая скорость
 |
Ф
ω
Рис. 1.28. Получение однофазной ЭДС при расположении катушки в постоянное магнитное поле
Теперь представим себе, что в это же магнитное поле поместили систему из 3-х одинаковых катушек, оси которых cдвинуты в пространстве относительно друг друга на 120˚ (рис. 1.29).
 |
Ф
С ω
А
В
Рис.1.29. Получение трехфазной ЭДС при расположении 3-х катушек в постоянное магнитное поле
Если заставить ее вращаться с той же угловой скоротью ω, то в них возникнет 3-х фазная cистема ЭДС. Если взять отдельно взятую катушку А, то в ней, как и в однофазной cистеме возникнет ЭДС eА= Em·sinωt.
Катушка В отличается от А тем, что она повернута относительно ее на 120˚ в пространстве. Следовательно, в ней индуцируется точно такая же ЭДС, что в А, но все явления в ней будут запаздывать на время, которое необходимо, чтобы В заняла в пространстве место А. Т.к. полному обороту катушки соответствует 1-й период Т синусоидальной ЭДС, то повороту на 120˚ соответствует время Т/3, тогда eВ = Em·sin(ωt-120˚ ). А т.к. угол между катушками А и С =240º, то eС = Em·sin(ωt-240˚ ) = =Em·sin(ωt+120˚ ).
Графически эти ЭДС можно изобразить, как показано на рис. 1.30.
 |
Рис. 1.30. Графическое изображение трехфазной ЭДС
Существует несколько схем соединения отдельных фаз многофазной системы. Для 3-х фазной системы основные способы соединения фаз – в звезду и в треугольник.
Соединение в Y получается, если концы всех фаз соединить в общий узел, а начала фаз включаются в нагрузку. Графически это имеет вид, как показано на рис. 1.31.
 N –нейтральная
N –нейтральная
(нулевая) точка.
Рис. 1.31. Соединение 3-фазной обмотки в Y
В этом случае, напряжение между началом фазы и нулевой точкой называется фазным напряжением ( Uф[MSOffice1]), а напряжение между началами 2-х фаз называется линейным (Uл). Обычно имеют место только симметричные системы, т.е.UА=UВ=UС=Uф ; UАВ=UВС=UАС=UЛ.
![]() Векторная диаграмма напряжений при соединении
3-фазной обмотки в Y приведена на рис 1.32. Причем UЛ = √
3 Uф для звезды IЛ = IФ. Соединение в Δ
получается, если конец каждой фазы соединяются с началом следующей фазы. От
вершин Δ идут 3 провода к нагрузке.
Векторная диаграмма напряжений при соединении
3-фазной обмотки в Y приведена на рис 1.32. Причем UЛ = √
3 Uф для звезды IЛ = IФ. Соединение в Δ
получается, если конец каждой фазы соединяются с началом следующей фазы. От
вершин Δ идут 3 провода к нагрузке.
 |
Рис. 1.32. Векторная диаграмма напряжений при соединении 3-фазной
обмотки в Y
Векторная диаграмма напряжений при соединении 3-фазной обмотки в Δ приведена на рис. 1.33.
 |
Рис. 1.33. Векторная диаграмма при соединении 3-фазной обмотки в Δ
![]() При таком соединении ÙА=ÙВ=ÙС=ÙАВ=ÙВС=ÙАС
, т.е ÙЛ = ÙФ, а при симметричной
нагрузке ÌЛ = √ 3 ÌФ.
При таком соединении ÙА=ÙВ=ÙС=ÙАВ=ÙВС=ÙАС
, т.е ÙЛ = ÙФ, а при симметричной
нагрузке ÌЛ = √ 3 ÌФ.
Трехфазные трансформаторы.
Часто бывает нужно передать в нагрузку энергию трехфазного тока. Это можно сделать, включив соответствующим образом 3 одинаковых одно-фазных трансформатора, или одним трехфазным трансформатором. Обычно трехфазные трансформаторы делаются стержневыми, т.е. состоят из 3-х стержней соединенных ярмом (рис.1.34, 1.35).
Рис.1.35. Соединение обмоток Y, Δ и зигзаг
Рис.1.34. Трехфазный трансформатор
На каждый стержень наматываются 2 обмотки- первичная и вторичная обмотки одной фазы. Первичные обмотки принято обозначать: А-Х, В-Y, C-Z, а вторичные, соответственно, a-x, b-y, c-z. Первичные и вторичные обмотки чаще всего соединяются звездой или треугольником. При соединении звездой начало каждой фазы подключаются к трехфазной сети источника или нагрузки, а концы (x, y, z) соединяются в общую точку (нейтральную), из которой всегда выходит нулевой провод. При соединении Δ ,конец первой фазы соединяется с началом 2-й, конец 2ой – с началом 3-й, конец 3-й – с началом первой.
Точки соединения начала одной фазы и конца другой включаются в 3-фазную сеть. Иногда вторичные обмотки включают в зигзаг. В этом случае обмотка каждой фазы состоит из 2-х катушек с одинаковым числом витков, но намотанных на разные стержни и соединенных встречно. ЭДС, наводимые в катушках одной фазы, сдвинуты между собой на 1/3 периода, поэтому ЭДС всей фазы равна геометрической разности ЭДС 2-х катушек, т.е.Ефз= √3 Ек, где Ек- ЭДС одной катушки. При соединении в зигзаг Ефз меньше Еф при соединении в Y или ∆, если при Y или ∆ фазная обмотка состоит из 2-х катушек, то Еф = 2Ек, т.е. больше, чем при зигзаге. Соединение в зигзаг применяют иногда в выпрямителях для устранения явления вынужденного намагничивания. Для 3-х фазных 2-х обмоточных трансформаторов приняты следующие соединения обмоток: Y/Y- , Y-/∆, Y /∆ , ∆ /Y- . Обозначение над чертой относится к первичной обмотке, а под чертой – к вторичной. Если обмотка имеет выведенную 0-ю точку, то в обозначении указано Y-. Для включения на параллельную работу трансформаторы объединяются в группы от 0 до 11, их обозначают Y/Y– 0 (12), Y/∆ -11( или 3 или 7). Группа 3-х фазного трансформатора зависит от схемы соединения первичной и вторичной обмоток, направления их намотки и обозначения зажимов. Между векторами линейных ЭДС первичной и вторичной обмоток есть угловое смещение, за единицу которого принимается угол 30˚. Это смещение зависит от направления намотки и способа включения обмоток. На каждый стержень наматываются 2 обмотки- первичная и вторичная обмотки одной фазы. Первичные обмотки принято обозначать: А-Х, В-Y, C-Z, а вторичные, соответственно, a-x, b-y, c-z. Первичные и вторичные обмотки чаще всего соединяются звездой или треугольником. При соединении звездой начало каждой фазы подключаются к трехфазной сети источника или нагрузки, а концы (x, y, z) соединяются в общую точку (нейтральную), из которой всегда выходит нулевой провод (рис. 1.36). При соединении Δ, конец первой фазы соединяется с началом 2-й, конец 2ой – с началом 3-й, конец 3-й – с началом первой (рис. 1.37).
 |
Рис. 1.36. Определение группу трансформатора при соединении Y/Y
Для определения углового смещения можно воспользоваться циферблатом часов, на котором каждая цифра сдвинута по отношению к другой на 30˚, а стрелки условно принято считать: минутную за вектор линейного напряжения первичной обмотки, мысленно всегда остановленную на цифре 12, а часовую – за вектор линейного напряжения вторичной обмотки.

Рис. 1.37. Определение группу трансформатора при соединении Y/Y с измененными фаз на вторичной обмотки
Для определения углового смещения можно воспользоваться циферблатом часов, на котором каждая цифра сдвинута по отношению к другой на 30˚, а стрелки условно принято считать: минутную за вектор линейного напряжения первичной обмотки, мысленно всегда остановленную на цифре 12, а часовую – за вектор линейного напряжения вторичной обмотки. Если трансформатор Y/Y-, причем одноименные первичная и вторичная обмотки находятся на одном стержне и намотаны в одинаковом направлении, то вектора линейных напряжений первичной и вторичной обмоток совпадают по направлению, т.е. их угловое смещение = 0 ( или 12), тогда запишем группу Y/Y- – 0.
Если во вторичной обмотке фазы поменять местами, то между одноименными векторами линейных напряжений (А-Х, а-х) возникает угловое смещение на 120˚( часы показывают 4), т.е получили трансформатор Y/Y-4, и т.д. При соединении обмоток 3-х фазного трансформатора по схеме Y/Y -можно получить любую четную группу. Если соединить обмотки трансформатора по схеме Y /∆ , ∆ /Y можно показать, что получается трансформатор любой нечетной группы, т.е. 1,3,…,11. Стандартными группами являются Y/Y - 0, Y/ ∆ -11, Y /∆ -11 . Фаза А- желтая, В- зеленая, С - красная.
Трансформаторы для преобразования числа фаз
В некоторых случаях ( в схемах ДП, кабельных магистралей, в выпрямителях и др.), надо преобразовать 3-х фазную сеть переменного тока в сеть с другим числом фаз.
Рассмотрим трансформатор, преобразующий трехфазную сеть в шестифазную (симметричная). Для этого в обычном трехфазном трансформаторе делают две двойные обмотки (a, b, c и a’, b’, c’) c одинаковым числом витков , но с противоположным направлением намотки . Все обмотки включаются в Y. Во вторичных обмотках a , b, c наводятся ЭДС , совпадающие по фазе с ЭДС первичных обмоток , а в обмотках a’ , b’ , c’ – в противофазе с ЭДС первичных обмоток . Если нулевые точки вторич-ных обмоток соединить, то во вторичной цепи получится симметричная шестифазная схема (рис.1.38).
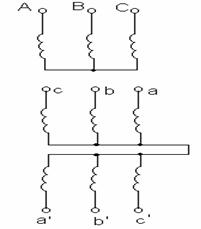
Рис. 1.38. Трансформатор, преобразующий трехфазную сеть в
шестифазную (симметричная)
Схема Скотта
 Для преобразования
трехфазного тока в двухфазный, применяется схема Скотта, состоящая из 2-х
однофазных трансформаторов Тр1и ТрII. Концы
А,В,С подключены к трехфазной сети с линейным напряжением Uл
(рис. 1.39). Первичная обмотка Тр1-
А-В имеет число витков W1 и
включена под полное линейное напряжение Uл=UАВ, таким
образом на каждый виток этой обмотки приходится напряжение UЛ /W1 . Первичная
обмотка трансформатора ТрII- C-D включена
концом D в среднюю точку обмотки А-В, имеет число витков 0,707W1 и включена под напряжение UCD=Uл
sin60˚= 0,707 UЛ2, тогда
на каждый виток этой обмотки приходится напряжение 0,707 UЛ
/ 0,707W1 = UЛ /W1, т.е. такое же, как в Тр1.
Для преобразования
трехфазного тока в двухфазный, применяется схема Скотта, состоящая из 2-х
однофазных трансформаторов Тр1и ТрII. Концы
А,В,С подключены к трехфазной сети с линейным напряжением Uл
(рис. 1.39). Первичная обмотка Тр1-
А-В имеет число витков W1 и
включена под полное линейное напряжение Uл=UАВ, таким
образом на каждый виток этой обмотки приходится напряжение UЛ /W1 . Первичная
обмотка трансформатора ТрII- C-D включена
концом D в среднюю точку обмотки А-В, имеет число витков 0,707W1 и включена под напряжение UCD=Uл
sin60˚= 0,707 UЛ2, тогда
на каждый виток этой обмотки приходится напряжение 0,707 UЛ
/ 0,707W1 = UЛ /W1, т.е. такое же, как в Тр1.
Рис. 1.39. Схема Скотта
Следовательно, напряжение вторичных обмоток обоих трансформаторов равны по величине (UAB=UCD= (W2/W1)Uл) и сдвинуты по фазе на 90˚. На диаграмме отрезками ab и cd показаны приведенные напряжения вторичных обмоток U’AB, U’CD,образующих симметричную двухфазную цепь (рис.1.40).
 |
![]()
![]() .
.
![]()
Рис. 1.40. Преобразование однофазной схемы в двухфазную
Можно однофазную схему преобразовать в двухфазную со сдвигом фаз 180˚. Для этого у вторичной обмотки однофазного трансформатора выводят среднюю точку, т.е. получаем две обмотки с одинаковым числом витков W’2 и W”2(W’2 = W”2), т.е с одинаковыми двухфазными напряжениями которые находятся в противофазе.
Параллельная работа трансформаторов
При параллельном включении трансформаторов их первичные и вторичные обмотки раздельно подсоединяют параллельно к общим шинам (рис. 1.41).
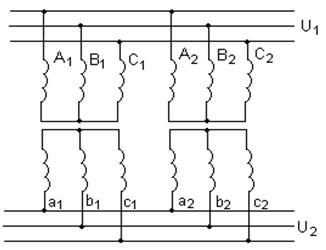 |
Рис.1.41. Параллельное включение трансформаторов
На параллельную работу можно включать любое количество трансформаторов, но при этом должен быть выполнен ряд условий:
1. равенство номинальных первичных и вторичных напряжений трансформаторов;
2. принадлежность трансформаторов к одинаковым группам ;
3. равенство напряжений к.з. и их активных и реактивных составляющих.
Первое условие означает равенство коэффициентов трансформации параллельно работающих трансформаторов, причем обмотки трансформаторов должны быть включены одноименными зажимами (а1 с а2 и т.д. ) на одну шину, чтобы индуктированные во вторичных обмотках ЭДС были равны и направлены встречно, и их геометрическая сумма равнялась нулю, тогда между трансформаторами не возникнет никаких токов. Если это условие не выполняется, т.е. n1≠n2 и E2I≠Е2II, то появляется составляющая ΔЕ2, которая создает между трансформаторами уравнительные токи Iур , а т. к . сопротивления короткого замыкания обмоток малы, то Iур может быть очень велик.
Второе условие означает, что первичные обмотки трансформатора включены в общую сеть источника тока, поэтому от групп соединения обмоток вектора линейных ЭДС будут совпадать по фазе. Если группы параллельно включенных трансформаторов одинаковы, то и вектора линейных ЭДС вторичных обмоток совпадают, и и уравнительных токов нет. Если группы трансформаторов неодинаковы, то эти вектора не совпадают по фазе, и их геометрическая сумма не равна нулю, значит появляются большие уравнительные токи.
Третье условие означает, что напряжения короткого замыкания и их активные и реактивные составляющие определяют нагрузку каждого трансформатора при параллельной работе. Если эти напряжения не равны, то нагрузка между трансформаторами распределяется неравномерно у трансформатора с меньшим Uкз нагрузка будет выше.
1.8. Электрические машины
Общие сведения
Электрические машины предназначены для преобразования механической энергии в электрическую или электрической в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Машина, преобразующая электрическую энергию в механическую, называется двигателем. Принципиально любая электрическая машина является обратимой, то есть может работать и генератором и двигателем. В зависимости от рода тока, в цепи которого работает электрическая машина, они делятся на машины постоянного и переменного тока. Машины переменного тока бывают синхронные и асинхронные, оба вида могут быть однофазными или трёхфазными. В практике чаще всего синхронные машины применяются, как генераторы, а асинхронные как двигатели. И чаще используются трёхфазные машины. Машины постоянного тока используются и как генераторы и как двигатели.
Действие всех электрических машин основано на законах электродинамики, то есть законах электромагнитной индукции и электромагнитных сил. Если между полюсами постоянного магнита или электромагнита (N-S) вращать рамку (внешним источником вращения) со скоростью n (по часовой стрелке), то по закону электромагнитной индукции в активных проводниках рамки a-b и c-d, (которые перемещаются перпендикулярно линиям магнитного потока) возникнут ЭДС, направление которых определяются правилом правой руки (рис. 1.42).
 |
Рис.1.42. Пояснение принципа работы простейшей электрической машины.
Так как эти проводники одновременно перемещаются относительно потока в противоположных направлениях, то и ЭДС в них будут противоположного направления. По закону электромагнитной индукции ЭДС витка, равная сумме ЭДС двух проводников находится из условия е=-dФ/dt, так как Ф=BS, а В=const, то e=-Bds/dt, то есть раз меняется площадь витка, перпендикулярная направлению магнитного потока, то ЭДС будет переменной- синусоидальной. Если замкнуть рамку на внешнее сопротивление то под воздействием ЭДС в замкнутой цепи потечёт ток i. Таким образом механическая энергия, затрачиваемая на вращение рамки преобразуется в электрическую энергию, отдаваемую в сопротивление внешнего приёмника энергии, то есть получили простейший генератор. Если в эту же неподвижную рамку, находящуюся в магнитном поле (N-S) подать ток i, то при взаимодействии тока i и потока Ф образуется электромагнитный момент Мэм~iФ, который начнёт вращать рамку, значит электрическая энергия преобразуется в механическую энергию, то есть машина работает двигателем. За один оборот рамки между N-S ЭДС в ней опишет полную синусоиду. Частота этой синусоидальной ЭДС за один оборот рамки зависит от количества полюсов. Так как у электрических машины есть не менее двух полюсов (их всегда чётное количество), то их принято считать парами (пара полюсов) и обозначать р- число пар полюсов. В нашем случае р=1, но у машины может быть и больше пар полюсов, тогда за один оборот рамки в ней возникнет несколько периодов синусоидальной ЭДС, а частота ЭДС ¦~р, но так как скорость вращения рамки не 1 об\мин, а n об\мин, то в реальной машине частота индуктированной ЭДС ¦=рn/60 (60 сек. В 1 мин.). То есть в любой электрической машине существует жёсткая связь между числом пар полюсов, скоростью вращения и частотой индуктированной ЭДС. В реальной машине используется не один виток, а многовитковые катушки. Любая электрическая машина состоит из двух частей: неподвижной – статора, и подвижной – вращающегося ротора. Чтобы ротор мог свободно вращаться внутри статора, между ними есть воздушный зазор, который стремятся сделать набольшим (от долей мм до нескольких мм.). Статор машин собирается из пластин электротехнической стали (как и трансформатор) толщиной 0,35 или 0,5 мм. В зависимости от вида машины (постоянного или переменного тока) эти пластины штампуются либо с явно выраженными полюсами (постоянного тока) на которые одевается обмотка электромагнита магнита, либо с полузакрытыми пазами (переменного тока), расположенными равномерно по внутренней окружности кольца, в которые закладываются обмотки. Пластины собираются в пакеты и крепятся к станине машины, которая отливается из чугуна или стали. На щиток станины выводятся концы всех обмоток, расположенных на статоре. Сбоку станина закрывается боковыми щитами, через которые пропущен вал ротора. Роторы машин тоже набираются из пластин электротехнической стали, в которых сделаны пазы для обмоток. Конкретное устройство роторов будем рассматривать при изучении машин разных типов. Обмотки машин делаются медным проводом и состоят из многовитковых катушек, уложенных определённым образом на статоре и на роторе в зависимости от типа машины.
1.9. Асинхронные машины
Асинхронная машина, как и любая, может работать и генератором и двигателем. Но как генератор она обладает рядом существенных недостатков и практически используется, как двигатель. Асинхронные двигатели бывают однофазными, двухфазными и трёхфазными. Статор машины собирается из пластин электротехнической стали, в которых делаются полузакрытые пазы. В эти пазы укладывают обмотку. Рассмотрим сначала трёхфазный асинхронный двигатели. У них обмотка статора собрана из соответствующим образом соединённых трёх катушек, сдвинутых в пространстве на 120° и образующих трёх фазную систему. На щиток станины выводятся 6 концов- начала и концы каждой фазы, то есть обмотки можно включить и звездой и треугольником. Роторы асинхронных машин бывают двух типов: фазный и короткозамкнутый.
Короткозамкнутый ротор собирается из листов стали с полностью закрытыми пазами, в которые укладываются массивные стержни, соединённые по торцам металлическими кольцами. Часто такая обмотка делается из алюминия, который под давлением заливается в пазы ротора. Такой ротор не имеет выводов во внешнюю цепь. Двигатели с короткозамкнутым ротором дешевле, проще и надёжней в эксплуатации, чем при фазном роторе, но их регулировочные свойства хуже. Фазная обмотка ротора делается аналогично статорной трёхфазной. Концы трёх фаз соединены в звезду, а начала их выведены на контактные кольца, укреплённые на валу ротора (каждая фаза к своему кольцу) и изолированные друг от друга и от вала машины. На станине укреплены угольные или медные щётки, которые при вращении вала скользят по кольцам. С помощью щёток обмотки ротора могут замыкаться накоротко или подключаться к внешним сопротивлениям. Фазные роторы используются реже короткозамкнутых и только в асинхронных двигателях большой мощности.
Принцип действия асинхронного двигателя
Представим трёхфазную обмотку статора в виде трёх катушек, сдвинутых в пространстве 120°, в которые подаётся трёхфазный ток (рис. 1.43).
 |
U
t
а) б)
Рис. 1.43. Диаграмма сдвига фаз (а) и схема вращения обмоток А, В, С (б)
Условимся, что направление тока от начала к концу рамки принимаем за положительное, а от конца к началу –за отрицательное. В момент Т1 в А-Х тока нет, а в В-У и C-Z- есть. Эти витки образуют магнитное поле указанного направления (по правилу буравчика).
Таким образом за полпериода питающего напряжения поля статора повернулось на 180°, то есть за один период оно сделает полный оборот на 360°. Если в трёхфазную обмотку статора подать трёхфазный ток, то возникнет вращающееся со скоростью n = 60 об/мин. (рис. 1.44)
¦1 / p магнитное поле, где ¦1- частота (так как ¦1 и р- const , то и n- const).
Это поле пересекая проводники замкнутой накоротко или на внешнее сопротивление обмотки неподвижного ротора, наводит в них ЭДС E2:
Е2 = 4,44 ¦ I кобW2Ф (1.53)
(при S=1, то есть в момент когда ротор неподвижен); коб - обмоточный коэффициент, зависящий от способа укладки обмотки ротора, W2- число витков обмотки ротора. А так как обмотки ротора замкнутые, то по ним течёт ток I2. Этот ток, взаимодействуя с потоком статора создаёт силу Fy, которая тянет проводники ротора за полем статора, она создаёт вращающий момент Мвр, направленный в сторону вращения поля статора. Под его действием ротор начинает вращаться со скоростью n2. (Так как проводников в роторе много то вращающий момент машины равен сумме вращающих моментов всех проводников). В двигательном режиме n2<n1, то есть поле ротора отстаёт от поля статора, то есть ротор и поле статора вращаются несинхронно, отсюда и название двигателя. Если n2=n1, то ротор неподвижен относительно поля статора, значит в его витках не наводится ЭДС и токи, то есть будет вращающегося момента, и вращение ротора прекратиться. n1- называется синхронной скоростью, в асинхронных двигателях ротор её не достигает.
 |
Рис. 1.44. Схема вращения обмоток А, В, С для Т1- Т4 моментов времени
Магнитное поле статора вращается относительно ротора со скоростью ns=n1-n2 об\мин. Отставание ротора от поля статора в асинхронных двигателях принято характеризовать величиной скольжения S=ns/n1, её принято определять либо в относительных единицах S=(n1-n2)/n1, либо в процентах
S%=(n1-n2) 100%/n1. (1.54)
Если ротор неподвижен S=1 или 100%, если машина достигла синхронной скорости S=0, то есть в двигательном режиме S меняется от 0 до 1.
Если посторонним источником вращения вращать ротор в направлении противоположном направлению вращения поля, то
n1 + n2
S= ¾¾¾ >1, (1.55)
n1
такой режим называется режимом электромагнитного тормоза. Если же вращать ротор по направлению поля статора, но со скоростью n2>n1,
n1-n2
S = ¾¾¾ < 0, (1.56)
n1
это будет генераторный режим, но в таком режиме асинхронный двигатель обычно не работает.
При работе двигателя частота ЭДС и тока в обмотках равна:
p(n1- n2) n1 pn1
¦2 = ¾¾¾¾ × ¾ = ¾¾ × S =¦1S (1.57)
60 n1 60
А величина ЭДС равна
Е = 4,44 ¦2 W2 коб Ф = 4,44 ¦1 S W2 коб Ф = E2 S. (1.58)
Сопротивление обмотки ротора Z2 имеет активную и индуктивную составляющие, а так как индуктивная составляющая зависит от частоты, то сопротивление обмотки ротора
Z2 =![]() ,
(1.59)
,
(1.59)
тогда ток в цепи ротора при работе асинхронного двигателя
E2S
I2s = ¾¾¾¾ (1.60)
![]()
Вращающий момент двигателя зависит от магнитного потока, тока ротора и определяется, как
Мвр = С Фm I2s cos Y2s, (1.61)
где, Y2s-угол между током I2s и ЭДС Е2s в роторе, так как сопротивление ротора зависит от величины S, то и Y2 тоже зависит от S; Фm- магнитный поток статора; С-конструктивный коэффициент, учитывающий число фаз, число пар полюсов, витков обмотки и её конструктивного выполнения; для данной машины С- постоянная величина.
Таким образом Мвр является сложной функцией от величины S. Для асинхронного двигателя важно знать Мвр=¦(S) (рис. 1.45). Графически она имеет вид: величины Smax и определяются из условия dM/dS=0. При S=1, Мвр=Мпуска. Асинхронный двигатель работает устойчиво с постоянной скоростью, если вращающий момент равно (Мвр= Мт) тормозному моменту Mп нагрузки.
Мврmax
 |
0 1 S
двигатель тормоз
Рис. 1.45. Зависимость вращающего момента от скольжения S
Чем больше нагрузка, тем меньше n2 и больше Мвр. Областью устойчивой работы асинхронного двигателя является участок (0-Smax). При номинальной нагрузке S=0,03-0,05, то есть 3-5%, с ростом нагрузки S увеличивается, а при холостом ходе близко к 0. Участок (Smax-1) -область неустойчивой работы двигателя, то есть при малейшем уменьшении момента Мвр скольжение сильно увеличивается и двигатель останавливается.
Рабочие характеристики асинхронного двигателя
Рабочие характеристики (рис. 1.46) асинхронного двигателя определяют зависимость тока I1, числа оборотов ротора n2, скольжения S, вращающего момента Мвр, коэффициента мощности cosj1, КПД h от полезной нагрузки на валу двигателя Р2. n2=¦(Р2) характеризуется следующим : при холостом ходе (Р2=0) n2»n1, при увеличении нагрузки до полной n2 падает всего на 2-6%.
Поэтому вращающий момент Мвр почти пропорционален нагрузке, которую несёт двигатель. Но так как скорость n2 при больших нагрузках несколько падает, то кривая Мвр немного ползёт вверх. Так как n2 меняется немного, то скольжение S тоже растёт немного, на 2-6%. Ток I1 при холостом ходе имеет большую реактивную составляющую (на создание потока) и очень малую активную. При росте нагрузки начинает расти активная составляющая, а реактивная практически не меняется. Поэтому при малых нагрузках активная составляющая растёт несильно, и I1 меняется слабо, а при больших нагрузках активные составляющие токов I1 и I2 сильно возрастают, и изменение I1 становится большим.
Коэффициент мощности cosj1- характеризует угол между U1 и I1. При холостом ходе в токе I1 преобладает реактивная составляющая, поэтому угол j1 велик, а cosj1- мал (порядка 0,2). С ростом нагрузки увеличивается активная составляющая тока, и угол j1 уменьшается, то есть cosj1- растёт, при номинальной нагрузке он достигает наибольших значений (0,75-0,85).
 |
I1 Mвр
n2
S
Рис. 1.46. Рабочие характеристики асинхронного двигателя
(М0 – момент механических потерь)
А при очень больших нагрузках приходится увеличивать поток Ф, поэтому опять растёт реактивная составляющая тока, то есть несколько увеличивается j1, а cosj1 немного падает. КПД меняется, как в трансформаторе, то есть при холостом ходе h=0, а при увеличении нагрузки растёт до некоторого максимального значения (при равенстве постоянных и переменных потерь), а затем начинает падать.
1.10. Синхронные машины
Синхронная электромашина может быть и двигателем и генератором. Особенностью этих машин является то, что в них все процессы происходят при синхронной скорости, то есть число оборотов ротора равно числу оборотов поля статора, то есть выполняется зависимость n1=n2=60 ¦ / p -для двигателя (¦-частота питающей сети), а для генератора, который приводят во вращение посторонним источником вращения, выходной величиной служит частота вырабатываемой ЭДС-¦= pn / 60 (n- скорость вращения ротора).
Отсюда машины и называются синхронными. Практически вся вырабатываемая сейчас энергия получается от синхронных генераторов. В зависимости от рода первичного двигателя, вращающего синхронный генератор, он бывает нескольких типов: 1) на ГЭС, где первичным двигателем является гидротурбина, используется гидрогенератор-тихоходная явно- полюсная машина с большим числом полюсов; 2) на ТЭС, где первичным двигателем является паровая турбина, используется турбогенератор- быстроходная неявнополюсная машина, с малым числом полюсов; 3) на маленьких электрических станциях, например, на собственных электрических станциях предприятия связи, где первичным двигателем является дизель, используются дизель-генераторы-тихоходные и быстроходные явно полюсные машины.
Устройство и принцип действия трёхфазных синхронных генераторов
 Он
состоит как и любая электрическая машина из статора и ротора. Существует
несколько конструкций синхронных машин: явнополюсные машины с полюсами,
расположенными на статоре, а трёхфазная обмотка укладывается в пазах
ротора. Тогда статор набирается в пакет из пластин электротехнической стали, а
на полюса одевается обмотка возбуждения, она питается постоянным током и
создаёт постоянное магнитное поле в машине (рис. 1.47).
Он
состоит как и любая электрическая машина из статора и ротора. Существует
несколько конструкций синхронных машин: явнополюсные машины с полюсами,
расположенными на статоре, а трёхфазная обмотка укладывается в пазах
ротора. Тогда статор набирается в пакет из пластин электротехнической стали, а
на полюса одевается обмотка возбуждения, она питается постоянным током и
создаёт постоянное магнитное поле в машине (рис. 1.47).
 |
Рис. 1.47. Пояснение к принципу работы синхронного генератора
Ротор делается так же, как у асинхронных машин с фазным ротором, то есть в нём сделаны пазы, в которые укладывается трёхфазная обмотка, остоящая из трёх катушек, сдвинутых в пространстве на 120° и соединённых чаще всего звездой. Концы соединяются в общую точку, а начала фаз выведены на три изолированных друг от друга кольца, укреплённые на валу ротора. К каждому кольцу прижимается неподвижная щётка, укреплённая на статоре. Через неё ЭДС снимается с обмотки ротора в нагрузку (рис. 1.48). В электрических машинах принято часть машины в которой образуется ЭДС, называть якорем. В данном случае якорем будет ротор. Принцип действия такого генератора таков. Между полюсами постоянного магнита (или эл.магнита, созданного обмоткой возбуждения) помещают трёхфазную систему катушек и приводят её во вращение посторонним источником вращения. При вращении катушек в постоянном магнитном поле в них наводится ЭДC со сдвигом фаз на 2П/3, то есть на 1/3 периода. Частота этой ЭДС ¦=pn/60, где n- скорость, с которой вращается якорь генератора. Чтоб ¦=const, надо чтобы n=const. Чтобы получить промышленную частоту ¦=50Гц, надо выдерживать постоянное соотношение n=3000 об\мин.
Если сделать машину с p=1, то надо обеспечить n=3000 об\мин, если p>1, то n<3000 об\мин. e1=Emsinwt и так далее. Но такую конструкцию машины можно делать только при небольших мощностях (до 15 кВа) и на небольшое напряжение, (380\220В), так как большие напряжения и токи трудно снимать с подвижных контактов.
 |
t
Рис.1.48. Диаграммы напряжений синхронного генератора
Принципиально безразлично, вращать ли трёхфазную обмотку в неподвижном постоянном магнитном поле или вращать это поле относительно неподвижной трёхфазной обмотки. Поэтому есть вторая конструкция синхронной машины, когда трёхфазная якорная обмотка укладывается в пазы статора, то есть статор такой, как у асинхронной машины, а ротор делается явно полюсным, и на его полюсах складывается обмотка возбуждения, питаемая постоянным током (рис. 1.49).
 |
Рис. 1.49. Ротор синхронного генератора
На валу ротора укрепляются два изолированных кольца, к которым через щётки подаётся постоянный ток. Теперь ротор, вращаясь от постороннего источника вращения, вращает магнитное поле со скоростью n относительно трёхфазных обмоток, и в них наводится точно такая же ЭДС с ¦=pn/60. Но теперь большие токи и напряжения снимаются с неподвижных обмоток. Обычно такие роторы делаются с р>3, тогда скорость машины можно делать небольшой (n<1000 об\мин).если надо обеспечить большие скорости, то есть n>1000 об\мин, то есть р<3, то для увеличения механической прочности ротора делают тройную конструкцию- неявнополюсный ротор. Он выполнен в виде цилиндра, у которого на части поверхности имеются пазы. В них укладывается обмотка возбуждения по которой пропускают I= и создают постоянное вращающееся поле. Обычно неявнополюсные роторы делают с р=1, то есть высокоскоростными. Принцип действия у синхронных машин любой конструкции одинаков.
Характеристики синхронных генераторов
Основными характеристиками синхронного генератора являются:
1) характеристика холостого хода E=f(Iв), при Iнг=const;
2) нагрузочная характеристика U=f(Iв), при Iнг=const ;
3) внешняя характеристика U=f(Iнг), при Iв=const ;
4) регулировочная характеристика Iв=f(Iнг), при U=const.
Рассматривая все характеристики можно сказать, что эти характеристики снимаются при n = const. Если синхронный генератор работает вхолостую, то есть нагрузка не подключена, то обмотка возбуждения создаёт намагничивающую силу Fв=IвWв (Wв-число витков обмотки возбуждения), которая создаёт магнитный поток Фв. При вращении ротора этот поток пересекает проводники трёхфазной обмотки и индуцирует в ней ЭДС, которая отстаёт от потока на угол p\2. Действующее значение этой ЭДС, как и в трансформаторе, равно Е0 = 4,44 f кобWФm (W- число витков первой фазы, коб- обмоточный коэффициент трёхфазной обмотки). Так как Е0 прямо пропорционально величине Фm, то она будет зависеть от Iв также, как Фв=f(Fв), то есть в другом масштабе.
Характеристика холостого хода повторяет кривую намагничивания магнитной цепи машины. Характеристика холостого хода начинается не с 0, а от Е0=Еост, которая вызвана остаточным магнитным потоком в машине (рис. 1.50).
Рис. 1.50. Характеристика холостого хода E=f(Iв)
Е0=f(Iв) имеет криволинейный характер. Для определения остальных характеристик, выясним, что такое реакция якоря. При подключении нагрузки генератора в обмотке якоря протекает ток.Если нагрузка симметричная, то токи в фазах будут сдвинуты на 1\3 периода. Эти токи создадут вращающееся переменное магнитное поле со скоростью n=60f \p, то есть с той же скоростью, с какой вращается ротор. Таким образом постоянное и переменное поля вращаются с одинаковой синхронной скоростью, то есть они жёстко сцеплены. При этом большая часть магнитных силовых линий вращающегося поля якоря замыкается по магнитной цепи машины, то есть по статору и ротору, образуя поток якоря Фа. А меньшая часть магнитных силовых линий поля замыкается вокруг проводников обмотки якоря, образуя поток рассеяния Фsa. Наличием этого потока обусловлено индуктивное сопротивление обмотки якоря. Поток якоря Фа, замыкаясь по магнитной цепи машины, воздействует на магнитный поток полюсов и изменяет его величину и распределение в пространстве. Это воздействие поля якоря на поле полюсов называется реакцией якоря. Из-за неё магнитный поток при нагрузке не равен магнитному потоку при холостом ходе, а это влияет на величину ЭДС и напряжение на зажимах якоря. Воздействие поля якоря на поле полюсов зависит от характера нагрузки генератора- активной, индуктивной или ёмкостной, так как направление магнитного потока реакции якоря Фа меняется в зависимости от характера нагрузки. В этом случае суммарный рабочий поток машины будет равен векторной сумме потоков Фв (полюсов) и Фа (реакции якоря) Фр=Фв+Фа. При чисто активной нагрузке угол между ЭДС Е0 и током в якорной обмотке I будет равен 0, а векторы потоков Фв и Фа будут находиться под углом 90[ÈÀ2], то есть суммарный рабочий поток машины Фр будет меньше, чем при холостом ходе. При индуктивной нагрузке ток I отстаёт от Е0 на 90, а потоки Фв и Фа направлены встречно, то есть угол между ними 180, то есть рабочий поток Фр будет ещё меньше, чем при активной нагрузке. При ёмкостной нагрузке ток I опережает Е0 на 90, а потоки Фm и Фа направлены в одну сторону, то есть рабочий поток равен алгебраической сумме этих потоков и будет больше, чем при холостом ходе.
Теперь посмотрим как это отражается на характеристиках машины при нагрузке.
Нагрузочная характеристика синхронного генератора имеет зависимость U=f(Iв), которая снимается при постоянном токе нагрузки Iнг = const и постоянном cosφ. Характеристика холостого хода повторяет кривую намагничивания магнитной цепи машины. Характеристика холостого хода начинается не с 0, а от Е0=Еост, которая вызвана остаточным магнитным потоком в машине (рис. 1.51).
 φ <0
φ <0
xx
φ=0
φ>0
Рис. 1.51. Нагрузочная характеристика синхронного генератора
U- напряжение на зажимах генератора при нагрузке, оно зависит от величины тока нагрузки. Рассмотрим эти характеристики при разных видах нагрузки. При активной нагрузке φ = 0 , а напряжение будет меньше ЭДС холостого хода, т.к. рабочий поток будет меньше, чем при холостом ходе за счет поперечной реакции якоря, т.е. эта характеристика пойдет ниже характеристики холостого хода. При индуктивной нагрузке φ >0, рабочий поток будет еще меньше, т.е. характеристика пойдет еще ниже и за счет уменьшения потока, и за счет падения напряжения в самих обмотках якоря. При ёмкостной нагрузке φ < 0, рабочий поток увеличивается, т.е. напряжение растет, и несмотря на падение напряжения в обмотках якоря, может стать больше, чем при холостом ходе.
 Внешняя характеристика генератора U = f (Iнг) при Iв = const
и cosφ = const (рис. 1.52).
Внешняя характеристика генератора U = f (Iнг) при Iв = const
и cosφ = const (рис. 1.52).
φ<0
φ=0
φ>0
Рис. 1.52. Внешняя характеристика генератора
Она тоже зависит от характера нагрузки . Поток реакции якоря вызван током нагрузки, который течет по якорной обмотке, и поэтому он будет тем больше чем больше этот ток, и тем большее действие будет оказывать на рабочий поток, т.е. на величину напряжения . При активной нагрузке φ = 0 он уменьшает рабочий поток машины, т.е. с ростом тока нагрузки U будет падать за счет падения напряжения в обмотке и уменьшения потока Фр. При индуктивной нагрузке φ > 0 поток Фр будет уменьшаться еще больше, поэтому U будет тоже уменьшаться больше , чем при активной нагрузке. При емкостной нагрузке (φ < 0) рабочий поток увеличивается , поэтому U может тоже с ростом нагрузки увеличиваться, т.е. характеристика идет выше, чем при активной нагрузке .
Регулировочная характеристика Iв = f ( Iнг ) снимается при U = const и cosφ = const (рис. 1.53).
Так как напряжение на зажимах генератора тоже должно быть постоянным то и рабочий поток генератора тоже должен оставаться постоянным. Т.к.Фр складывается из двух потоков – Фm, который зависит от тока нагрузки, то для поддержания постоянного потока Фр при изменении нагрузки, а значит и потока Фа, приходится менять и поток Фm, т.е. ток возбуждения. Эти характеристики тоже зависят от характера нагрузки. При активной нагрузке (φ=0) поток Фа уменьшает поток Фр, поэтому, чтобы поддержать Фр=const, надо увеличивать поток Фm, т.е. ток возбуждения. Для этого случая регулировочная характеристика пойдёт вверх. При индуктивной нагрузке (φ > 0) поток Фа еще больше уменьшает Фр, поэтому приходится еще больше увеличивать поток Фm для поддержания Фр=const, т.е. регулировочная характеристика пойдёт еще выше. При ёмкостной нагрузке (φ < 0) поток Фа увеличивает поток Фр, поэтому для обеспечения Фр=const поток Фm надо уменьшать, т.е. уменьшать ток возбуждения машины , значит регулировочная характеристика пойдёт ниже, чем при активной нагрузке, т.е. с ростом Iнг ток возбуждения надо уменьшать.
 |
φ>0
φ=0
φ<0
Рис. 1.53. Регулировочная характеристика
1.10. Машины постоянного тока
Принцип действия и устройство машины постоянного тока (МПТ)
Если между двумя полюсами постоянных магнитов поместить виток из проводящего материала и вращать его в этом постоянном поле полюсов, то в этом витке при пересечении им магнитных силовых линий наведётся ЭДС (переменная), которую можно снять с контактных колец 1 и 2, неподвижными щётками. Направление ЭДС в каждом активном проводнике витка зависит от того, под каким полюсом он находится, и в какую сторону вращается виток, и определяется правилом правой руки. Если щётки подключить к сопротивлению, то по нему потечёт переменный ток. Таким образом мы получили простейший генератор переменного тока, а именно однофазный синхронный генератор. Если теперь концы витка присоединить не каждый к своему кольцу, а к двум изолированным друг от друга полукольцам, а щётки расположить так, чтоб одна (А) всё время касалось того полукольца, которое соединено с проводником витка, находящимся под северным полюсом, а другая (Б) в это время касалась другого полукольца, соединённого с проводником, находящимся под S-полюсом, то, независимо от положения витка, со щёток будет сниматься ЭДС одной и той же полярности, т.е. неизменная по направлению и переменная по величине.
Таким образом получили выпрямленную ЭДС. Щётка А всегда имеет отрицательный потенциал (-), а Б-положительный (+), то есть через нагрузку ток течёт в одном направлении, т, е., происходит выпрямление наведённого в витке abcd напряжения и тока в пульсирующий. Полукольца А и Б, позволяющие выпрямить переменную ЭДС, являются механическим выпрямителем и называются коллекторными пластинами, а их совокупность - коллектором. Так получили простейший генератор постоянного тока. При двух полукольцах и одном витке выпрямленное напряжение на щётках имеет большую пульсацию. Чтоб её уменьшить, её в постоянное поле полюсов можно добавить ещё одну рамку перпендикулярно первой, а коллектор будет иметь уже 4 пластины, тогда с одного витка снимается е1, а с другого-е2, сдвинутая относительно е1 на П/2, а суммарная ЭДС витков будет равна их огибающей, то есть пульсация сильно уменьшится (рис. 1.54, 1.55).
 |
а) б)
Рис. 1.54. Пояснение принципа работы простейшей машины (а) переменного тока и (б) постоянного тока
 e
e
t
t
Рис. 1.55. Временные диаграммы работы простейшего генератора постоянного тока
Реальный генератор постоянного тока состоит из неподвижного статора и вращающегося ротора (якоря). Между ними есть воздушный зазор. Статор машины постоянного тока делается двухполюсным и имеет основные полюса, дополнительные полюса, которые укрепляются между основными, и станина. На основных полюсах размещается обмотка возбуждения, которая служит для создания магнитного потока вместо постоянных магнитов. Чаще всего машины постоянного тока делаются с числом пар полюсов р>1. Дополнительные полюса ставятся для улучшения условий коммутации между щётками и коллектором, на них одевается специальная обмотка, по которой тоже течёт постоянный ток. Основные полюса набираются из листов электротехнической стали, толщиной 0,5-1 мм в виде сердечника (1) на который одевается катушка обмотки возбуждения (2) и болтом (3) крепится к станине (4).
Станина отливается из чугуна, или стали,
она служит как магнитопровод для потока основных и дополнительных полюсов и для
прикрепления машины к фундаменту. Дополнительные полюса бывают или монолитными,
или тоже собираются из листов электротехнической стали и крепятся к станине с
помощью болтов строго по середине между основными полюсами. Якорь собирается в
виде пакета из тонких листов электротехнической стали, в котором сделаны пазы
для обмотки. Пазы бывают открытыми и закрытыми. Обмотка якоря укладывается в
пазы и состоит из отдельных катушек, концы которых прикрепляют к двум
коллекторным пластинам. Эти катушки называются секциями обмотки и могут
состоять из одного или нескольких последовательно соединённых витков.
4
Стороны располагаются под разноимёнными полюсами, тогда в них наводится наибольшая ЭДС. Секции имеют две активные стороны. Конец одной секции и начало следующей присоединяются к одной. Все секции соединяются между собой последовательно и образуют замкнутую цепь. Коллекторных пластин в реальной машине постоянного тока столько, сколько секций имеет обмотка якоря. Проводники обмотки соединяются между собой так, чтобы их ЭДС складывались, поэтому начальные (конечные) двух последовательно соединённых секций в любой момент должны находится под полюсами одинаковой полярности. В зависимости от способа соединения секций между собой обмотки бывают волновые и петлевые (рис. 1.56).
 |
|||
 |
|||
Рис. 1.56. Конструкция генератора постоянного тока
В волновых обмотках начальные активные проводники двух последовательно соединённых секций лежат под разными полюсами одинаковой полярности (N1,N2),а конечные- под разными полюсами другой полярности (S1,S2), тогда наводимые в них ЭДС складываются.
В параллельных обмотках начальные активные проводники двух соседних секций лежат под одним полюсом (N1), à конечные- под другим (S1) другой полярности. Расстояние между начальными активными проводниками двух соседних секций называется шагом обмотки по якорю (у), а расстояние между двумя коллекторными пластинами, к которым присоединены начальный и конечный активные проводники первой секции, называются шагом обмотки по коллектору (ук) (рис. 1.57). Для любой обмотки :
Y = Yk (1.62)
у
yk yk
Рис. 1.57. Расположение обмоток генератора постоянного тока
При петлевой обмотке одна секция подключается к двум соседним коллекторным пластинам. Коллектор представляет собой цилиндр, собираемый из медных пластин, изолированных друг от друга и от вала машины. Для соединения якорной обмотки с внешней цепью служат щётки, закрепляемые на станине машины и прижатые к коллектору. Щётки делают из чистого графита или с добавками меди или бронзы. Они имеют такую ширину, что одновременно могут перекрыть несколько коллекторных пластин. Количество щёток в машине равно количеству полюсов 2р.
Реакция якоря в машине постоянного тока
При холостом ходе машины, когда в якоре нет тока намагничивающая сила обмотки возбуждения создаёт магнитное поле полюсов, которое симметрично относительно оси полюсов и равномерно распределяется в воздушном зазоре между статором и ротором. Линия АБ, перпендикулярная оси полюсов и проходящая через центр машины, является геометрической нейтралью (рис.1.58).
При холостом ходе совпадает с физической нейтралью машины, то есть линией, проходящей через центр машины и перпендикулярной оси результирующего магнитного поля, то есть
Фр = Фm. (1.63)
Если подключить к машине нагрузку, то по обмоткам якоря пойдёт ток, который создаст вокруг проводников якоря своё магнитное поле, которое замыкается поперёк оси полюсов (рис.1.58.). Воздействие этого поля на поле полюсов называется реакцией якоря. В МПТ создаётся поперечное поле реакции якоря, так как замыкается поперёк оси полюсов. При этом результирующий поток в машине
Фр ¹ Фm, (1.64)
не равен потоку полюсов и уже не будет симметричен относительно оси полюсов и равномерно распределён в воздушном зазоре.
Рис. 1.58. Реакция якоря в МПТ
То есть поперечное поле реакции якоря перераспределяет
в нагруженной машине магнитное поле полюсов, под одним краем полюса ослабляет
его, а ![]() под
другим-усиливает. При этом физическая нейтраль, проходящая перпендикулярно
направлению результирующего магнитного потока Фр уже не совпадает с
геометрической нейтралью, а занимает положение А¢Б
(рис.1.58.). За счёт насыщения стали увеличение потока под одним краем полюса
будет меньше, чем уменьшение под другим краем, поэтому результирующий магнитный
поток Фр при нагрузке будет меньше Фm при холостом ходе машины.
под
другим-усиливает. При этом физическая нейтраль, проходящая перпендикулярно
направлению результирующего магнитного потока Фр уже не совпадает с
геометрической нейтралью, а занимает положение А¢Б
(рис.1.58.). За счёт насыщения стали увеличение потока под одним краем полюса
будет меньше, чем уменьшение под другим краем, поэтому результирующий магнитный
поток Фр при нагрузке будет меньше Фm при холостом ходе машины.
ЭДС машины постоянного тока
В МПТ существует в общем случае р пар полюсов. Линия, которая проходит через центр якоря точно посередине между полюсами N и S, условно называется геометрической нейтралью,а часть окружности якоря, соответсвующая одному полосу называется полюсным делением t. В любой машине t=2р,то есть число полюсных делений равно числу полюсов (рис. 1.59).
Количество щёток в машине равно количеству полюсов, причём щётки, снимающие ЭДС одинаковой полярности включаются между собой параллельно. Часть секций обмотки, замыкающаяся на две соседние щётки разной полярности, называется ветвью обмотки.
 |
Рис. 1.59. МПТ с двумя пар полюсами
Так как щётки включаются между собой параллельно, то и все ветви обмотки соединяются между собой параллельно и называются параллельными ветвями. Их может быть только чётное количество, и обозначается число параллельных ветвей - 2а. На якоре машины укладывается большое число проводников N. В каждой параллельной ветви обмотки будет последовательно включено N/2a проводников. В любом из этих проводников (х) вращающихся в магнитном поле полюсов, создаётся ЭДС :
Ех = Вх![]()
![]() (1.65)
(1.65)
где
Вх- значение магнитной индукции в точке, в которой в данный момент
находится проводник, ![]() -длина проводника,
-длина проводника, ![]() -скорость перемещения
проводника. ЭДС одной параллельной ветви равно сумме ЭДС всех активных
проводников этой ветви, то есть ЭДС машины :
-скорость перемещения
проводника. ЭДС одной параллельной ветви равно сумме ЭДС всех активных
проводников этой ветви, то есть ЭДС машины :
Е = Sех = SВх![]() = В(N/2a)
= В(N/2a)![]() ,
(1.66)
,
(1.66)
где В- среднее значение магнитной индукции на первом полюсном делении.
Скорость перемещения проводника в магнитном поле :
2 р t n
![]() = ¾¾¾ .
(1.67)
= ¾¾¾ .
(1.67)
60
Так как В- есть плотность
магнитного потока, то Вt![]() = Ф - потоку первого полюса (
= Ф - потоку первого полюса (![]() -длина полюса равна
длине проводника), тогда :
-длина полюса равна
длине проводника), тогда :
N 2ptn N 2pn Np
Е = В ¾¾ ![]() ¾¾¾ = ¾¾ ¾¾ Ф = ¾¾¾ nФ . (1.68)
¾¾¾ = ¾¾ ¾¾ Ф = ¾¾¾ nФ . (1.68)
2a 60 2a 60 a60
Для каждой машины Np/60a = C = const-для данной машины, тогда ЭДС машины постоянного тока Е = С n Ф. Отсюда видно, что её можно изменить только меняя число оборотов или поток Ф.
Работа генератора постоянного тока
При вращении якоря машины постоянного тока со скоростью n в проводниках его обмотки индуктируется ЭДС Е=С n Ф, направление которой определяется правилом правой руки. Для вращения якоря используется какой-либо первичный двигатель с вращающим моментом М1.
Если обмотку якоря через щётки замкнуть на какое-либо сопротивление нагрузки (приёмник энергии), то по нему потечёт ток Iя, который в обмотках якоря совпадает по направлению с ЭДС (рис. 1.60).
Этот ток взаимодействует с потоком полюсов Ф и создаёт электромагнитный момент Мy, направление его определяется правилом левой руки и встречно по отношению к М1, то есть вращающий момент приводного двигателя должен быть остаточным для преодоления тормозного момента Мy, чтобы якорь генератора вращался со скоростью n, необходимой для получения заданной ЭДС.
 |
Рис. 1.60. Работа генератора постоянного тока
Ток якоря генератора встречает на своём пути сопротивление нагрузки rн, сопротивление обмотки якоря rоб и сопротивление переходных контактов между щётками и коллектором rщ. rоб и rщ составляют внутреннее сопротивление генератора rя = rоб+rщ. Тогда ток якоря Iя = E/(rя+rн), но произведение Iяrн=U-напряжению на зажимах генератора (нагруженного).Таким образом уравнение равновесия ЭДС для генератора U = E-Iяrя. Из него видно, что при увеличении нагрузки увеличивается падение напряжения на внутреннем сопротивлении машины. Кроме того за счёт поперечной реакции якоря уменьшается результирующий поток в машине, то есть уменьшается ЭДС Е. Значит напряжение на зажимах генератора уменьшается при увеличении нагрузки.
Способы возбуждения генераторов постоянного тока
Генераторы постоянного тока могут быть с магнитным возбуждением, тогда их полюса сделаны из постоянных магнитов, создающих магнитный поток, или с электромагнитным возбуждением, тогда на их полюса из электротехнической стали одевается специальная обмотка возбуждения, по которой пропускается постоянный ток, создающий в магнитной цепи постоянный во времени и пространстве магнитный поток. Постоянные магниты используются очень редко, так как их магнитный поток очень мал, поэтому чаще всего используется электромагнитное возбуждение. В зависимости от способа питания обмотки возбуждения генераторы постоянного тока бывают с независимым возбуждением и с самовозбуждением.
При независимом возбуждении обмотка возбуждения питается от постороннего источника постоянного тока, она имеет большое число витков, поэтому даже при малом Iв (несколько % от Iя) можно создать большую намагничивающую силу Fв=IвWв, то есть большой магнитный поток. При независимом возбуждении любые изменения тока якоря равные току нагрузки не влияют на величину Iв, то есть менять Iв можно только меняя сопротивление цепи возбуждения Rв. При самовозбуждении обмотка возбуждения питается от якорной обмотки этой же машины, то есть любые изменения Iя приводят к изменению тока Iв. В зависимости от способа соединения между собой обмоток якоря и возбуждения бывают машины параллельного, последовательного и смешанного возбуждения (рис. 1.61).
 |
Рис. 1.61. Способы возбуждения генераторов постоянного тока
При параллельном возбуждении обмотка возбуждения включается параллельно якорной обмотке и имеет большое число витков (как при независимом возбуждении), а Iв мал (несколько % от Iя). Обмотка последовательного возбуждения имеет малое число витков и включается последовательно с якорной обмоткой, а Iя=Iв. При смешанном возбуждении на полюсах размещаются две обмотки возбуждения: последовательная и параллельная. Процесс самовозбуждения идёт одинаково при любой схеме возбуждения. Наиболее широко применяются генераторы параллельного возбуждения. Рассмотрим этот процесс для них. Первичный двигатель вращает якорь генератора, в магнитной цепи которого есть небольшой остаточный магнитный поток Фост. Этот поток во вращающемся якоре индуцирует небольшую ЭДС Еост (несколько % от Ен), под действием которой в замкнутой цепи обмоток якоря и возбуждения потечёт небольшой Iв. Он создаст намагничивающую силу, направленную согласно с Фост, поэтому увеличивается магнитный поток машины, то есть её ЭДС Е, которая, в свою очередь, увеличит Iя и Iв. Возросший Iв увеличивает намагничивающую силу и вызывает дальнейшее увеличение магнитного потока Фm, то есть и ЭДС, а значит и Iв. Процесс самовозбуждения ограничен определённым напряжением, которое зависит от скорости вращения якоря машины, насыщения магнитной цепи и сопротивления цепи обмотки возбуждения. Произведение Iв rв (сопротивление цепи обмотки возбуждения) равно напряжению на зажимах генератора. Если rв=const, то зависимость U от Iв будет прямой линией, угол наклона которой определяется сопротивлением цепи возбуждения, так как
tg a=krв, (1.69)
где k- коэффициент пропорциональности, зависящий только от выбранного масштаба Iв и U на графике. Процесс самовозбуждения возможен лишь до точки А, где Е=U,то есть для самовозбуждения необходимо выполнять условие, чтоб U<Е, что возможно при Iв<Iва (рис. 1.62).
 |
а) б)
Рис. 1.62. Вольт-амперные (а) и рабочие (б) характеристики генератора постоянного тока.
Таким образом точка А характеризует установившийся режим работы машины. Если изменить скорость вращения генератора или сопротив- ление цепи возбуждения, то измениться величина Е, до которой можно возбудить машину, так как измениться a. При увеличении rв, a-растёт и увеличивается падение напряжения в цепи обмотки возбуждения, то есть равенство Е=U наступит при гораздо меньшем значении Е. При некотором критическом сопротивлении rвкр зависимость U=¦(Iв) пересечёт характеристику холостого хода в точке С, то есть возбуждения практически не будет. Для самовозбуждения генератора надо выполнить ряд условий :
1) наличие потока остаточного намагничивания Фост, так как он создаёт Еост, вызывающую ток в обмотке самовозбуждения. Если нет Фост, то есть машина размагничена, её надо намагнитить, пропустив по обмотке возбуждения постоянный ток от постороннего источника электрической энергии. После его отключения в машине вновь появится Фост ;
2) обмотка возбуждения должна создавать магнитный поток, направленный согласно с Фост то есть увеличивать поле остаточного магнетизма. При встречном включении обмотки возбуждения её намагничивающая сила может полностью размагнитить машину, так как будет уменьшать Фост. Если обмотка возбуждения включена встречно с Фост, надо изменить в ней направление тока;
3) сопротивление цепи обмотки возбуждения должно быть меньше критического (rв<rкр), при котором самовозбуждение генератора невозможно;
4) сопротивление внешней нагрузки rн должно быть велико, так как при малом rн ток Iв будет мал, и генератор возбудится. Для самовозбуждения генератора последовательного возбуждения необходимо замкнуть его на нагрузку, так как иначе цепь якоря и обмотки возбуждения окажется разомкнутой, то есть Iв не появится, значит не будет самовозбуждения