O‘ZBEKISTON RESPUBLIKASI
OLIY VA O‘RTA MAXSUS TA’LIM VAZIRLIGI
TOShKENT AXBOROT TEXNOLOGIYaLARI UNIVERSITETI
“MURAKKAB O‘RNATILGAN TIZIMLAR”
MODULI BO‘YIChA
O‘ Q U V –U S L U B I Y M A J M U A
Toshkent - 2016
|
Tuzuvchi: |
TATU “Telekommunikatsiyada boshqaruv tizimlarining apparat va dasturiy ta’minoti” kafedrasi katta o‘qituvchisi X.Yu.Abasxanova
TATU “Telekommunikatsiyada boshqaruv tizimlarining apparat va dasturiy ta’minoti” kafedrasi assistenti Mirzaeva.M.B
|
|
Taqrizchi: |
“MUT va T” kafedrasi mudiri, dotsent Amirsaidov U. B.
|
MUNDARIJA
II. MODULNI O‘QITIShDA FOYDALANILADIGAN INTERFAOL TA’LIM METODLARI
IV. AMALIY MAShG‘ULOT MATERIALLARI
I. ISHCHI DASTUR
Kirish
Bugungi kunda O‘zbekiston respublikasini telekommunikatsiya tarmog‘i asosan murakkab tizimlardan tashkil topgan va uning turkumiga har xil turdagi raqamli qurilmalar kiradi, jumladan raqamli kommutatsiya, uzatish tizimlari va zamonaviy tarmoq qurilmalari. Shuning uchun ushbu tizimlarni shakllantiruvchi “Murakkab o‘rnatilgan tizimlar” fanini o‘rganish dolzarb masalalardan biri hisoblanadi. “Murakkab o‘rnatilgan tizimlar” fani telekommunikatsiya tarmoqlarida ishlatiladigan murakkab qurilmalar turlarini, tavsifini, ularning tuzilishi, qurilishi, dasturiy ta’minoti, ishlash qoidalari va ular yordamida tizimlar qurish masalalarini o‘z ichiga oladi.
Modulning maqsadi va vazifalari
Fanning vazifasi talabalarni turli sxema va ma’lumotlarni o‘qish, murakkab o‘rnatilgan tizimlarni loyixalash va dasturlash, mikroprotsessor, mikrokontroller asosida murakkab o‘rnatilgan tizimlar va ma’lumot almashish prinsiplari, virtual mashinalarni qo‘llash, murakkab o‘rnatilgan tizimlar dasturiy ta’minotini loyixalashga, mustaqil fikrlashga o‘rganish uchun tayyorlashdan iborat.
Fanning vazifasi – uni o‘rganuvchilarga:
- real vaqt rejimidagi o‘rnatilgan tizimlar va ularning tuzilishi;
-o‘rnatilgan tizimlar modeli asosida qurilgan qurilmalarni yig‘ish va dasturlash;
- qurilmalar drayverlarini yozish, o‘rnatilgan tizimlarning dasturiy ta’minotni loyihalash, protokol dasturlarini loyihalash, xotira va vaqtni boshqarish protseduralari, turli kompaniyalarning bordlarini dasturlash, aloqa qurilmalarini yig‘ish va dasturlash prinsiplari, o‘rnatilgan tizimlarni tekshirish;
-o‘rnatilgan tizimlarning algoritmlarini ishlab chiqish, tizim qismlarini dasturlash, operatsion tizimlarni loyihalashtirish va tashkillashtirish, dasturlash o‘zgartirish, Linuks, Unix va Windows Os larda dasturlash va konfiguratsiyalash va manbaa ta’minotini boshqarish.
Modul bo‘yicha tinglovchilarning bilimi, ko‘nikmasi, malakasi va kompetensiyalariga qo‘yiladigan talablar
Tinglovchilar “Murakkab o‘rnatilgan tizimlar” fanini o‘rganishlari natijasida quyidagilarni bilishlari kerak:
Murakkab o‘rnatilgan tizimlar va ularning tuzilishi, sinflanishi, telekommunikatsiya tizimlarini loyihalash va qurishda ulardan foydalanish;
- o‘rnatilgan tizimlar va o‘rnatilgan tizimlarning tuzilishi, arxitekturalari, dasturiy ta’minoti, xotira va protsessor qurilmalari, raqamli kiritish/chiqarish aloqa shinalari, ketma-ket va parallel aloqa interfeyslari, ma’lumot uzatishni tashkil etish asoslari, o‘rnatilgan tizimlarning ishlash algoritimlari, jarayonlarni rejalashtirish, operatsion tizimlar va ularning yadrolari bilan ishlash haqidagi tasavvurga ega bo‘lishi;
- sxemalar va ma’lumotlarni o‘qish, o‘rnatilgan tizimlarni loyihalash va dasturlash, o‘rnatilgan tizimlarning dasturiy ta’minoti va qo‘llaniluvchi fayl tizimlarini tushunish, tizimning apparat va dasturiy ta’minotini moslashtirishni bilishi va ulardan foydalana olishi ;
- mikroprotsessor asosida qurilgan o‘rnatilgan tizimlar, mikrokontroller asosida qurilgan o‘rnatilgan tizimlar, ularda axborot almashish prinsiplari qo‘llash ko‘nikmalariga ega bo‘lishi kerak;
- virtual mashinalarni qo‘llash, o‘rnatilgan tizimlar dasturiy ta’minotini loyihalash va dasturlash instrumentlari bo‘yicha malakalariga ega bo‘lishi kerak.
Modulni tashkil etish va o‘tkazish bo‘yicha tavsiyalar
“Murakkab o‘rnatilgan tizimlar” kursi ma’ruza va amaliy mashg‘ulotlar shaklida olib boriladi.
Kursni o‘qitish jarayonida ta’limning zamonaviy metodlari, pedagogik texnologiyalar va axborot-kommunikatsiya texnologiyalari qo‘llanilishi nazarda tutilgan:
- ma’ruza darslarida zamonaviy kompyuter texnologiyalari yordamida prezentatsion va elektron-didaktik texnologiyalardan;
- o‘tkaziladigan amaliy mashg‘ulotlarda texnik vositalardan, ekspress-so‘rovlar, test so‘rovlari, aqliy hujum, guruhli fikrlash, kichik guruhlar bilan ishlash, kollokvium o‘tkazish va boshqa interaktiv ta’lim usullarini qo‘llash nazarda tutiladi.
Modulning o‘quv rejadagi boshqa modullar bilan bog‘liqligi va uzviyligi
“Murakkab o‘rnatilgan tizimlar” moduli mazmuni o‘quv rejadagi “Diskret matematika”, “Dasturiy loyihalar”, “Tizimlarni modellashtirish va loyihalash asoslari”, “Raqamli mantiqiy qurilmalarni loyixalashtirish”, “Mikroprotsessorlar”, ”Boshqaruv tizimlari”, “O‘rnatilgan tizimlar va ularning dasturiy ta’minoti” o‘quv modullari bilan uzviy bog‘langan holda pedagoglarning dasturiy boshqaruv qurilmalarini yaratish bo‘yicha kasbiy pedagogik tayyorgarlik darajasini oshirishga xizmat qiladi.
Modulning oliy ta’limdagi o‘rni
Modulni o‘zlashtirish orqali tinglovchilar dasturiy boshqaruv qurilmalarini yaratishni o‘rganish, amalda qo‘llash va baholashga doir kasbiy kompetentlikka ega bo‘ladilar.
Modul bo‘yicha soatlar taqsimoti
|
№ |
Mavzu |
Auditoriya soatlari |
Mus-taqil Ish |
Jami |
|||
|
Jami |
Shu jumladan: |
||||||
|
|
Ma’ruza |
Amaliy (semi- nar) |
Tajriba (laboratoriya) ko‘rsatilmagan |
||||
|
1. |
Murakkab o‘rnatilgan tizimlar,xarakteristikasi va prinsiplari |
2 |
2 |
|
|
|
|
|
2. |
Murakkab o‘rnatilgan tizimlar misollari |
4 |
2 |
2 |
|
|
|
|
3. |
Murakkab o‘rnatilgan tizimlar arxitekturasi |
2 |
2 |
|
|
|
|
|
4. |
Mikroprotsessor asosida o‘rnatilgan tizimlar |
4 |
2 |
2 |
|
|
|
|
5. |
Mikrokontroller asosida o‘rnatilgan tizimlar |
6 |
2 |
4 |
|
|
|
|
6. |
Protsessorlar kompleksi:chipdagi tizimlar |
6 |
2 |
4 |
|
|
|
|
7. |
Murakkab o‘rnatilagn tizimlar aloqa soxasida qo‘llanilishi |
4 |
2 |
2 |
|
|
|
|
8. |
Aloqa soxasida murakkab o‘rnatilgan tizimlar apparat ta’minoti |
4 |
2 |
2 |
|
|
|
|
9. |
Murakkab o‘rnatilagan tizimlar dasturiy ta’minoti. |
4 |
2 |
2 |
|
|
|
|
10. |
Murakkab ilovalar dasturlari. |
2 |
2 |
|
|
|
|
|
11. |
Murakkab tizimlardagi dastur protokollari |
6 |
2 |
4 |
|
|
|
|
12. |
Aloqa tizimlarida ma’lumot strukturalari va jadvallari. |
2 |
2 |
|
|
|
|
|
13. |
Taymerni boshqarish va buferlar mexanizmi. |
4 |
2 |
2 |
|
|
|
|
14. |
Dasturiy ta’minotni boshqarish. |
2 |
2 |
|
|
|
|
|
15. |
Bir platali aloqa tizimlari. |
2 |
2 |
|
|
|
|
|
16. |
Tizim loyixalash mulikommunikatsion platasi |
4 |
2 |
2 |
|
|
|
|
17. |
Kernel platformasi asosidagi tizimlar va Linux tizimidagi ilovalar. |
6 |
2 |
4 |
|
|
|
|
18. |
Murakkab o‘rnatilgan tizimlarni ishlab chiqish jarayonlari. |
4 |
2 |
2 |
|
|
|
|
19 |
Murakkab o‘rnatilgan qurilmalar ishlab chiqish jixozlari va muxitlari. |
6 |
3 |
3 |
|
|
|
|
20 |
Tarmoq texnologiyalaridan foydalanib real vaqtda murakkab tizimlar aloqasini ta’minlash |
6 |
3 |
3 |
|
|
|
|
|
Jami |
80 |
40 |
40 |
|
40 |
120 |
NAZARIY MAShG‘ULOTLAR MAZMUNI
1 - mavzu: Murakkab o‘rnatilgan tizimlar,xarakteristikasi va prinsiplari “Murakkab o‘rnatilgan tizimlar” fani predmeti va
vazifalari. Murakkab o‘rnatilgan tizimlar turlari qo‘llanilishi soxalari.Murakkab o‘rnatilgan tizimlar xarakteristikalari strukturalari.
2 - mavzu: Murakkab o‘rnatilgan tizimlar misollari.
Murakkab o‘rnatilgan tizimlar strukturalari,dasturiy muxitlar.Qurilmalardagi murakkab o‘rnatilgan tizimlar,ularning ish prinsiplari.
3 - mavzu: Murakkab o‘rnatilgan tizimlar arxitekturasi.
Murakakab o‘rnatilgan tizimlar arxitekturalari.
4 - mavzu: Mikroprotsessor asosida o‘rnatilgan tizimlar.
Mikroprotsessorlar ularning arxitekturalari.Mikroprotsessorlar strukturalari.Mikroprotsessor asosida o‘rnatilgan tizimlar..
5 - mavzu: Mikrokontroller asosida o‘rnatilgan tizimlar. Mikrokontrollerlar ularning turlari ,strukturlari vaarxitekturalari.Mikrokontrollerlar asosidagi o‘rnatilgan tizimlar.
6 - mavzu: Protsessorlar kompleksi:chipdagi tizimlar.
Mikroprotsessor tizimlari,ularning strukturasi. Tashqi qurilmalar bilan ma’lumot almashishi prinsipi.Chiplar tushunchasi.Chipdagi tizimlar strukturasi va ishlash asoslari.
7 - mavzu: Murakkab o‘rnatilgan tizimlar aloqa soxasida qo‘llanilishi.
Murakkab o‘rnatilgan tizimlarning aloqa soxasidagi o‘rni.Ularning qo‘llanilish soxalari.Aloqa soxasidagi qurilmalarda murakkab o‘rnatilgan tizimlarning roli.
8 - mavzu: Aloqa soxasida murakkab o‘rnatilgan tizimlar apparat ta’minoti.
Aloqa soxasida qo‘llaniladigan qurilmalarning ishlash prinsipi.Qurilmalarga o‘rnatilgan tizimlar uchun dasturiy ta’minot yaratish.Dasturiy ta’minot asosida apparat ta’minotini yaratish.
9 - mavzu: Murakkab o‘rnatilgan tizimlar dasturiy ta’minoti.
Murakkab o‘rnatilgan tizimlar dasturlash muxitlari,ularning afzalliklari va kamchiliklari.Zamonaviy dasturiy ta’minotlar yaratish usullari.Dasturlar yaratish. Aloqa tizimlarida ma’lumotlar bilan ishlash mexanizmlari:ma’lumotlarni jadvallari va strukturalari.Murakkab o‘rnatiladigan dasturiy ta’minotlarni ishlab chiqish va boshqarish.
.
10 - mavzu: Murakkab ilovalar dasturlari.
Linuks, Unix va Windows Oslari va ularning yadrolari asosida tuzilgan tizimlar. Tizimlarni ishlab chiqarish mexanizmlari. Murakkab o‘rnatilgan tizim ilovalarni tuzish muxitlari va jixozlari.
11 - mavzu: Murakkab tizimlardagi dastur protokollari.
Murakkab o‘rnatilgan tizim ilovalarni tuzish muxitlari va jixozlari.Bu muxitlarda dastur va tizim yozish protseduralari va misollari.
12 - mavzu: Aloqa tizimlarida ma’lumot strukturalari va jadvallari.
Aloqa tizimlari.Aloqa tizimlarining ma’lumot strukturalari.Jadvallari.Ularning qo‘llanilishi.
13 - mavzu: Taymerni boshqarish va buferlar mexanizmi.
Taymerning vazifasi.Taymerlarga murojaat.Taymerni boshqarish va buferlash mexanizmi.
14 - mavzu: Dasturiy ta’minotni boshqarish.
Murakkab o‘rnatilagn tizimlar uchun dasturiy ta’minot yaratish va ularni qurilmalarga yozish.Dasturiy boshqariladigan qurilmalar yaratish.
15 - mavzu: Bir platali aloqa tizimlari.
Plata tushunchasi.Aloqa tizimlari.Bir platali va ko‘p platali tizimlar.Bir platali aloqa tizimlari.
16 - mavzu: Tizim loyixalash multikommunikatsion platasi.
Tizimlarni loyixalash. Tizim loyixalash multikommunikatsion platasi.
17 - mavzu: Kernel platformasi asosidagi tizimlar va Linux tizimidagi ilovalar.
Kernel platformasi.Uning asosidagi tizimlar. Linux tizimlari.
Kernel platformasi asosidagi tizimlar va Linux tizimidagi ilovalar.
18 - mavzu: Murakkab o‘rnatilgan tizimlarni ishlab chiqish jarayonlari.
Murakkab o‘rnatilgan tizimlar ishlab chiqish bosqichlari.Murakkab o‘rnatilgan tizimlarni soxalarda qo‘llash jarayonlari.
19 - mavzu: Murakkab o‘rnatilgan qurilmalar ishlab chiqish jixozlari va muxitlari.
Murakkab o‘rnatilgan tizimlar jixozlari va muxitlari bilan tanishish va qo‘llash.
20 - mavzu: Tarmoq texnologiyalaridan foydalanib real vaqtda murakkab tizimlar aloqasini ta’minlash.
Real vaqtda ishlaydigan murakkab tizimlar.Tarmoq texnologiyalari.
Tarmoq texnologiyalaridan foydalanib real vaqtda murakkab tizimlar aloqasini ta’minlash.
AMALIY MAShG‘ULOTLAR MAZMUNI
1-amaliy mashg‘ulot:
BSP Freescale i.MX31 PDK ishlab chiqish muxiti interfeysi
BSP Freescale i.MX31 PDK muxiti interfeysi va ularni ishga tushirish.
2-amaliy mashg‘ulot:
BSP Advantech ARK-1370 ishlab chiqish muxiti interfeysi
BSP Advantech ARK-1370 muxiti interfeysi bilan tanishish va ularni ishga tushirish.
3-amaliy mashg‘ulot:
BSP klonlashtirish
BSP klonlashtirish muxiti bilan ishlash.
4-amaliy mashg‘ulot:
Loyixani xosil qilish .
Loyixalash muxitlari.Loyixalash muxitlari interfeysi.Muxitlarda ishlash
5 – amaliy mashg‘ulot:
Komponentlarni qo‘shish.
Muxitlar yordamida qo‘shimcha komponetlar ishlab chiqarish dasturiy ta’minotini yaratish.
6 – amaliy mashg‘ulot:
Loyixa parametrlarini sozlash.
Loyixalarni parametrlarini o‘rganish.Qurilmalarni sozlash.
7 – amaliy mashg‘ulot:
Operatsion tizimlar obrazini ishga tushirish.
Operatsion tizimlar.Ilovalar yaratish.Operatsion tizimlar ilovalarini yaratish
8 – amaliy mashg‘ulot:
Emulyator bilan bog‘lanishni sozlash
Emulyatorlar bilan ishlash.Sozlash.Emulyator bilan bog‘lanish.
9 – amaliy mashg‘ulot:
Freescale i.MX31 PDK bilan bog‘lanishni sozlash
10 – amaliy mashg‘ulot:
Advantech ARK-1370 sozlash .
11 – amaliy mashg‘ulot:
Maxsus qurilmada namunalarni ishga tushirish
12 – amaliy mashg‘ulot:
Qism loyihalarni tuzish
13 – amaliy mashg‘ulot:
Qism ilovalarni yaratish
Loyixalarni parametrlarini o‘rganish.Qurilmalarni sozlash.
14 – amaliy mashg‘ulot:
Ilovalarni yig‘ish va ishga tushirish
Operatsion tizimlar.Ilovalar yaratish.Operatsion tizimlar ilovalarini yaratish
15 – amaliy mashg‘ulot:
Call Stack va boshqa sozlash oynalari
Call Stack.Boshqa sozlash oynalari. Call Stack va boshqa sozlash oynalari
16 – amaliy mashg‘ulot:
Remote Tools ishlab chiqarish vositalarini o‘rnatish.
Remote Tools ishlab chiqarish vositalari. Remote Tools ishlab chiqarish vositalarini o‘rnatish va ulardan foydalanish.
17 – amaliy mashg‘ulot:
Ishlab chiqarish vositalari interfeysi.
Ishlab chiqarish vositalari bilan tanishish.Ishlab chiqarish vositalari interfeysi
18 – amaliy mashg‘ulot:
Remote Tools ishlab chiqarish vositalarini o‘rnatish.
Remote Tools ishlab chiqarish vositalari. Remote Tools ishlab chiqarish vositalarini o‘rnatish va ulardan foydalanish.
19 – amaliy mashg‘ulot:
BSP strukturasi platformasi kodini ishlab chiqish.
Oqimlar drayverini yaratish
20 – amaliy mashg‘ulot:
Qurilma ishlab chiqish.
Qurilmalar yaratish.Qurilmalarga dasturlar yozish.Dasturiy boshqariladigan qurilmalar ishlab chiqish
O‘QITISH SHAKLLARI
Mazkur modul bo‘yicha quyidagi o‘qitish shakllaridan foydalaniladi:
- ma’ruzalar, amaliy mashg‘ulotlar (ma’lumotlar va texnologiyalarni anglab olish, aqliy qiziqishni rivojlantirish, nazariy bilimlarni mustahkamlash);
- davra suhbatlari (ko‘rilayotgan loyiha yechimlari bo‘yicha taklif berish qobiliyatini oshirish, eshitish, idrok qilish va mantiqiy xulosalar chiqarish);
- bahs va munozaralar (loyihalar yechimi bo‘yicha dalillar va asosli argumentlarni taqdim qilish, eshitish va muammolar yechimini topish qobiliyatini rivojlantirish).
BAHOLASH MEZONI
|
№ |
Baholash turlari |
Maksimal ball |
Ballar |
|
1 |
Keys topshiriqlari |
2.5 |
1.2 ball |
|
2 |
Mustaqil ish topshiriqlari |
0.5 ball |
|
|
3 |
Amaliy topshiriqlar |
0.8 ball |
II. MODULNI O‘QITIShDA FOYDALANILADIGAN INTERFAOL TA’LIM METODLARI
“SWOT-tahlil” metodi.
Metodning maqsadi: mavjud nazariy bilimlar va amaliy tajribalarni tahlil qilish, taqqoslash orqali muammoni hal etish yo‘llarni topishga, bilimlarni mustahkamlash, takrorlash, baholashga, mustaqil, tanqidiy fikrlashni, nostandart tafakkurni shakllantirishga xizmat qiladi.
Namuna: O‘zbekiston Respublikasida IPTV tizimining rivojlanish istiqbollarini SWOT tahlilini ushbu jadvalga tushiring.
|
S |
Yuqori sifat, yuqori tezlik, interaktiv xizmatlar |
HD formatdagi kanallar, 2 Mbit/s tezlik, eletron telegid xizmatlarini joriy qilish imkoniyatdlari |
|
W |
Tashqi ta’sirlar, transport tarmoqlarining talab darajada emasligi |
Tashqi mexanik ta’sirlarga zaif, infrastrukturasi yaxshi rivojlanmagan shaxarlarda qo‘llay olmaslik |
|
O |
Bitta optik toladan 3ta xizmatni tashkil etilishi |
IPTV, internet, telefoniya |
|
T |
Tizim komponentlari tannarxining yuqoriligi |
Abonentlar internetdan foydalanish darajasini oshirilishi |
“Aqliy hujum” metodi
“Aqliy hujum” metodining mohiyati jamoa hamkorligi asosida muammoni yechish jarayonlarini vaqt bo‘yicha bir qancha bosqichlarga (g‘oyalarni generatsiyalash, ularni tanqidiy va konstruktiv holatda ishlab chiqish) ajratishdan iborat.
Dars jarayonida aqliy hujumdan maqsadli foydalanish ijodiy, nostandart tafakkurlashni rivojlantirish garovi hisoblanadi. “Aqliy hujum” ni uyushtirish bir muncha sodda bo‘lib, undan ta’lim mazmunini o‘zgartirish jarayonida foydalanish bilan birgalikda ishlab chiqarish muammolarining yechimini topishda ham juda qo‘l keladi. Dastlab guruh yig‘iladi va ular oldiga muammo qo‘yiladi. Bu muammo yechimi to‘g‘risida barcha ishtirokchilar o‘z fikrlarini bildiradilar. Bu bosqichda hech kimning o‘zga kishi g‘oyalariga hujum qilishi va baholashiga haqqi yo‘q. Demak, “aqliy hujum” yo‘li bilan qisqa minutlarda o‘nlab g‘oyalarni yuzaga chiqarish imkoniyatlari mavjud bo‘ladi. Aslini olganda g‘oyalar sonini qo‘lga kiritish asosiy maqsad emas, ular muammo yechimini oqilona ishlab chiqish uchungina asos bo‘ladilar. Bu metod shartlaridan biri hech qanday tashqi ta’sirsiz qatnashuvchilarning har biri faol ishtiroki bo‘lishi kerak. Bildirilgan g‘oyalarning besh yoki oltitasigina asosiy hisoblanib, muammo yechimini topishga salohiyatli imkoniyatlar yaratadi.
Shunday qilib, “aqliy hujum” qoidalarini quyidagicha belgilash mumkin:
*olg‘a surilgan g‘oyalar baholanmaydi va tanqid ostiga olinmaydi;
*ish sifatiga emas, soniga qaratiladi, g‘oyalar qancha ko‘p bo‘lsa, shuncha yaxshi;
*istalgan g‘oyalarni mumkin qadar kengaytirish va rivojlantirishga qaratiladi;
*muammo yechimidan uzoq g‘oyalar ham qo‘llab quvvatlanadi;
*barcha g‘oyalar yoki ularning mag‘zi (farazlari) qayd etish yo‘li bilan yozib olinadi;
*”hujum”ni o‘tkazish vaqti aniqlanadi va unga rioya qilinishi shart;
*beriladigan savollarga qisqacha (asoslanmagan) javoblar berish ko‘zda tutilishi kerak.
Vazifasi. “Aqliy hujum” qiyin vaziyatlardan qutulish choralarini topishga, muammoni ko‘rish chegarasini kengaytirishga, fikrlash bir xilliligini yo‘qotishga va teng doirada tafakkurlashga imkon beradi. Eng asosiysi, muammoni yechish jarayonida kurashish muhitidan ijodiy hamkorlik kayfiyatiga o‘tiladi va guruh (auditoriya) yanada jipslashadi.
Ob’ekti. Qo‘llash maqsadiga ko‘ra universal hisoblanib, tadqiqotchilikda (yangi muammoni yechishga imkon yaratadi), o‘qitish jarayonida (o‘quv materiallarini tezkor o‘zlashtirishga qaratiladi), rivojlantiriladi (o‘z-o‘zini bir muncha samarali boshqarish asosida faol fikrlashni shakllantiradi), asqotadi.
Qo‘llanish usuli. “Aqliy hujum” ishtirokchilari oldiga qo‘yilgan muammo bo‘yicha har qanday mulohaza va takliflarni bildirishlari mumkin. Aytilgan fikrlar yozib boriladi va ularning mualliflari o‘z fikrlarini qaytadan xotirasida tiklash imkoniyatiga ega bo‘ladi. Metod samarasi fikrlar xilma-xilligi bilan tavsiflanadi va hujum davomida ular tashkil qilinmaydi, qaytadan ifodalanmaydi. Aqliy hujum tugagach, muhimlik jihatiga ko‘ra eng yaxshi takliflar generatsiyalanadi va muammoni yechish uchun zarurlari tanlanadi.
“Ajurli arra” metodi
“Ajurli arra” metodi tuzilish jihatdan o‘zida quyidagi bosqichlarni qamrab oladi.
1. Topshiriqni bo‘lish. Topshiriq va matnli materiallar bir nechta asosiy qismlarga (yoki mavzularga) kiritiladi.
2. Ekspert guruhlar. Qo‘lida bir mavzuga oid o‘quv topshiriqlari mavjud bo‘lgan talablar mavzuni muhokama qilish, boshqalarga o‘rgatish rejasini egallash uchun ekspert guruhga birlashadilar.
3. Birlamchi guruhlar. Tinglovchilar o‘zlarining birlamchi guruhlariga qaytadilar va ekspert guruhlarda o‘rganganlarini o‘qitishadi.
“Ajurli arra” metodi mohiyatiga aniqlik kiritish uchun ba’zi bir tavsiyalarni yoritish lozim.
1.O‘qitish jarayoniga bu tarzda yondoshilganda tinglovchilarning hamkorlikda ishlashiga va qisqa vaqt ichida katta hajmdagi axborotlarni o‘zlashtirishlariga imkon yaratiladi.
2.U yoki bu faoliyatni darsda amalga oshirish uchun tinglovchilarga boshlang‘ich axborotlarni uzatish zaruriyati tug‘ilsa, ma’ruza o‘rnini bosa oladigan samarali instrumentariy hisoblanadi.
3.O‘qituvchi murakkab mazmunli mavzular bo‘yicha tinglovchilarni darsga tayyorlash uchun oldindan ularning har biriga mo‘ljallangan alohida axborotli paket tayyorlaydi. Unda darslikdan, qo‘shimcha tarzda gazeta, jurnal, maqolalardan materiallar bo‘lishi kerak.
4. Har bir tinglovchi 2 guruh tarkibida ishtirok etadi: dastlab ”o‘z uyi” (birlamchi) guruhiga, keyin esa “ekspert guruhiga birlashib, o‘quv elementlarini mustaqil o‘rganishadi. Ekspert guruhini tezda tashkil etish uchun tinglovchilar olgan axborotli paketlarda har bir mavzuga oid materiallar bir xil rangdagi qog‘ozlarga yozilgan yoki rangli qalam bilan qog‘ozning biron-bir burchagi bo‘yalgani ma’qul.
5. Har bir guruhda 3 tadan 5 tagacha o‘quvchi (o‘quvchilarning soniga qarab) bo‘lishi mumkin. Har bir tinglovchi “o‘z uyi”dagilarni qayta uchrashish joyini aniqlab olishi kerak.
6.O‘qituvchi tinglovchilarni “rangli” topshiriqlar asosida guruhga birlashtirishni taklif etadi va ular alohida mavzular bo‘yicha ekspertga aylanadi. Misol uchun, “qizil”larni auditoriya xonasi oxirida, “ko‘k”larni esa yo‘lakchada uchrashish belgilanadi. Har bir ekspert guruhda 3 tadan kam tinglovchi bo‘lmasligi kerak.
7. Guruhlarga axborotli paket tarqatiladi. Har qaysi guruh turli xil materiallar to‘plamini olishlari va ularni o‘qishi, muhokama qilishi, aynan shu axborotlar bo‘yicha ekspertga aylanishi lozim, o‘quv materiallari to‘plamini olishlari va ularni o‘qishi, muhokama qilishi, aynan shu axborotlar bo‘yicha “ekspert” bo‘lishi uchun o‘quvchilarda vaqt yetarli bo‘lishi kerak. Bu uchun agar materiallar murakkab va katta bo‘lsa, ehtimol, bir dars to‘liq talab qilinadi.
8. Tinglovchilarga quyidagi topshiriqlar beriladi:
-paketdagi materiallarni qunt bilan o‘rganing va muhokama qiling;
-bir-biringizdan so‘rang va o‘quv materiallarini har biringiz tushunib olganingizga ishonch hosil qiling;
-o‘z “uyingiz“ guruhini o‘qitish zarurligini hisobga olib, materiallarning muhim o‘quv elementlariga e’tiborni qarating:
9. Tinglovchilarning o‘z “uylariga” qaytishlarini iltimos qiling. Har kim o‘z “uyi”-guruhiga axborot beradi. Shaksiz, “uy” guruhida ekspert guruhlaridan bittadan tinglovchi bo‘lishi shart, tinglovchi o‘rganib kelgan materiallarni o‘z guruhi tinglovchilariga o‘rgatish javobgarligini bo‘yniga olib, yana bir soat davom etishi mumkin.
10. Tinglovchilar bir-birlaridan axborotlarni o‘rganib bo‘lishgach, o‘qituvchi oldindan rejalashtirilgan faoliyat turini o‘tkazishi mumkin.
“Muammo” texnologiyasi
Texnologiyaning maqsadi: tinglovchilarga o‘quv fanining mavzusidan kelib chiqqan turli muammoli masala vaziyatlarining yechimini to‘g‘ri topishlariga o‘rgatish, ularda muammo mohiyatini aniqlash bo‘yicha malakalarni shakllantirish, muammolar yechishning ba’zi usullari bilan tanishtirish va uslublarni to‘g‘ri tanlashga o‘rgatish, muammoni kelib chiqish sabablarini, muammoni yechishdagi hatti-harakatlarni to‘g‘ri aniqlashga o‘rgatadi.
Mashg‘ulotning o‘tkazish tartibi:
O‘qituvchi tinglovchilarni guruhlarga ajratib, ularni o‘rinlariga joylashtirilgandan so‘ng, mashg‘ulotni o‘tkazish tartib-qoidalari va talablarini tushuntiradi, ya’ni u mashg‘ulotni bosqichli bo‘lishini va har bir bosqich tinglovchilardan maksimum diqqat-e’tibor talab qilinishi, mashg‘ulot davomida ular yakka, guruh va jamoa bo‘lib ishlashlarini aytadi. Bunday kayfiyat tinglovchilarga berilgan topshiriqlarni bajarishga tayyor bo‘lishlariga yordam beradi va bajarishga qiziqish o‘yg‘otadi. Mashg‘ulotni o‘tkazish tartib-qoidalari va talablari tushuntirilgach, mashg‘ulot boshlanadi:
Tinglovchilar tomonidan mashg‘ulot uchun tayyorlangan kinolavhani diqqat bilan tomosha qilib, unda yoritilgan muammoni aniqlashga harakat qilish, xotirada saqlab qolish yoki daftarga belgilab qo‘yish (agar kinofilm ko‘rsatishning imkoniyati bo‘lmasa, u holda o‘qituvchi o‘quv predmetining mavzusi bo‘yicha plakat, rasm, afisha yoki bir muammo bayon qilingan matn, kitobdagi o‘quv materialidan foydalanish mumkin):
*har bir guruh a’zolari tomonidan ushbu lavhadan (rasmdan, matndan, hayotiy voqeadan) birgalikda aniqlangan muammolarni vatman yoki formatdagi qog‘ozga flomaster bilan yozib chiqiladi;
*berilgan aniq vaqt tugagach, tayyorlagan ishni guruh vakillari tomonidan o‘qib eshittiriladi;
*o‘qituvchi guruhlar tomonidan tanlangan va muammolar yozilgan qog‘ozlarni almashtirgan holda guruhlargai tarqatiladi;
*tarqatilgan qog‘ozlarda guruhlar tomonidan yozilgan muammolardan har bir guruh a’zosi o‘zini qiziqtirgan muammodan birini tanlab oladi;
*o‘qituvchi tomonidan tarqatilgan quyidagi chizmaga har bir guruh a’zosi o‘zini qiziqtirgan muammodan birini tanlab oladi;
*o‘qituvchi tomonidan tarqatilgan quyidagi chizmaga har bir guruh a’zosi tanlab olgan muammosini yozib, mustaqil ravishda tahlil etadi.
“BLIS O‘YIN” metodi - harakatlar ketma-ketligini to‘g‘ri tashkil etishga mantiqiy fikrlashga, o‘rganayotgan predmeti asosida ko‘p, xilma xil fikrlardan, ma’lumotlardan kerakligini tanlab olishni o‘rgatishga qaratilgan. Ushbu texnologiya tinglovchilarga tarqatilgan qog‘ozlarda ko‘rsatilgan harakatlar ketma ketligini avval yakka holda mustaqil ravishda belgilab, so‘ngra o‘z fikrini boshqalarga o‘tkaza olish yoki o‘z fikrida qolish, boshqalar bilan hamfikr bo‘la olishga yordam beradi.
“BUMERANG” texnikasi – tinglovchilarni dars jarayonida, darsdan tashqarida turli adabiyotlar, matnlar bilan ishlash, o‘rganilgan materiallarni yoddan saqlab qolish, so‘zlab bera olish, fikrni erkin holda bayon eta olish hamda bir dars davomida barcha tinglovchi talabalarni baholay olishga qaratilgan. “Bumerang” texnologiyasi tanqidiy fikrlash, mantiqli shakllantirishga, imkoniyat yaratadi; xotirani, g‘oyalarni, fikrlarni, dallillarni yozma va og‘zaki shakllarda bayon qilish ko‘nikmalarini rivojlantiradi .
“SINKVEYN” metodi – ta’lim oluvchilarni axborotlarni qisqa bayon etishga o‘rgatadi, hamda olingan ma’lumotlar ustida chuqur ilanishga chorlaydi.
“QORA QUTI” metodi – tinglovchilar bu metod asosida yechiladigan muammolar aniq vaziyatni tahlil qilish orqali amalga oshiriladi, muammolar sababi yo‘l-yo‘lakay aniqlanadi.
“LOYIHA” metodi – ta’lim oluvchilarning invidual yoki guruhlarda belgilangan vaqt davomida, belgilangan mavzu bo‘yicha axborot yig‘ish, tadqiqot o‘tkazish va amalga oshirish ishlarini olib borishidir. Bu metodda ta’lim oluvchilar rejalashtirish, qaror qabul qilish, amalga oshirish, tekshirish va xulosa chiqarish va natijalarni baholash jarayonlarida ishtirok etadilar.
III. NAZARIY MATERIALLAR
Mavzu: Murakkab o’rnatilgan tizimlar xarakteristikasi va prinsiplari.
Reja:
1. Murakkab o’rnatilgan tizimlar xarakteristikasi.
2. Murakkab o’rnatilgan tizimlar prinsiplari.
3. O`rnatilgan tizim uch kalitli texnologiyalari
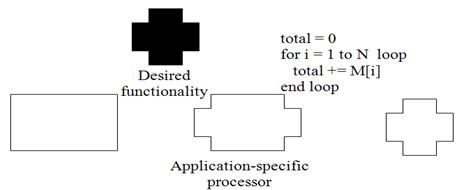
O`rnatilgan tizim ko`rinishi-bu o`zi nima? Dizayn muammosi – optimizatsiya dizayni metrikasi texnologiyalar protsessor texnologiyalari, IC texnologiyalari dizayn texnologi-yalari.
O`rnatilgan tizim ko`rinishi
Hamma joyda hisoblashga oid tizimlar bor
Bizning ko`pchiligimiz kompyuterlarning “ishchi stoli” haqida o`ylaymiz
–
PK ni![]()
–
Noutbuklar![]()
– Meynfreymlar
–
 Serverlar
Serverlar
• Lekin boshqa turdagi hisoblash tizimlari ham bor
– Ancha ko`p tarqalgan…
O`rnatilgan tizim ko`rinishi
• O`rnatilgan hisoblash tizimlari
– Elektron qurilmalarga o`rnatilga hisoblash tizimlari
aniqlash qiyin. Deyarli istalgan hisoblash tizimi stoldagi kovpyuterdan zo`r
har yili milliardlab tovar birliklari milionlar stoldagi qurilmalar bilan solishtiriladi avtomobilda 50 ta uy xo`jalik mollari bo`lishi mumkin
O`rnatilgan tizimlarni “qisqacha ro`yxati”
|
Modems MPEG decoders Network cards Network switches/routers On-board navigation Pagers Photocopiers Point-of-sale systems Portable video games Printers Satellite phones Scanners Smart ovens/dishwashers Speech recognizers Stereo systems Teleconferencing systemsTelevisions Temperature controllers Theft tracking systems TV set-top boxes VCR’s, DVD players Video game consoles Video phones Washers and dryers |
Anti-lock brakes
Auto-focus cameras
 Automatic teller machines
Automatic teller machines
Automatic toll systems
Automatic transmission
Avionic systems
Battery chargers
Camcorders
Cell phones
Cell-phone base stations
Cordless phones
Cruise control
Curbside check-in systems
Digital cameras
Disk drives
Electronic card readers
Electronic instruments
Electronic toys/games
Factory control
Fax machines
Fingerprint identifiers
Home security systems
Life-support systems
Medical testing systems
Ba`zi o`rnatiladigan tizimlarni umumiy xarakteristikalari
Yagona funksionallashgan: bitta programmani bir necha bor bajaradi
Zich chegaralangan: narxining pastligi, energiya sarfining kamligi, kichik, ko`rishni tezlashtirilganligi va boshqalar.
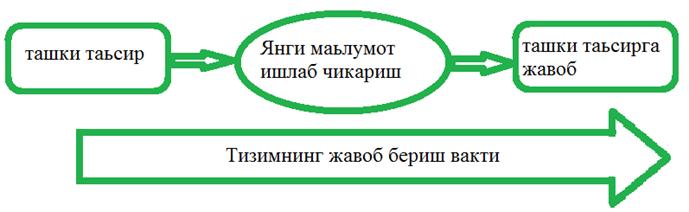
Reaktiv va real vaqt tartibida: tizimni o`rab turgan muhitni o`zgarishiga uzluksiz ta`sir qiladi,
to`xtalishlarsiz real vaqt tartibida natijalani aniqlashni hisoblash kerak
O`rnatilagan tizim masalan – raqamli fotoapparat
 |

 |
Yagona funksionallashgan – har doim raqamli kamera
Zich chegaralangan - Narxining pastligi, energiya sarfining kamligi, kichik, tezkor
Reaktiv va real vaqt tartibida – faqat kichik pog`onada
Dizayn muammosi – optimizatsiya dizayni metrikasi
Dizaynning aniq maqsadi:
– Funksional talab qilish bilan amalga oshirishni qurish
Dizaynni muhim topshirig`i:
– Ko`p sonli dizayn metrikasini baravar optimizatsiyalash
Dizayn metrikasi
– Amalga oshirish tizamini o`lchash xossasi
– Dizaynni metrik optimizatsiyasi muhim topshiriq hisoblanadi
Metrik dizayn optimizatsiyasi
Umumiy metrikalar
– Birlikning qiymati: NRE ning qiymatini hisobga olmaganda tizimni har bir tayyorlash nusxasi pullik qiymatidir
– NRE qiymati (takrorlanmaydigan injenerlik qiymati) : loyihalash tizimining bir martali pullik qiymati
– O`lchami : tizim talab etadigan fizik sath
– Unumdorlik : tizimni bajarish vaqti yoki o`tkazish qobilyati
– Quvvati: tizim foydalanadigan energiya soni Egiluvchanlik:NREqiymatigaog`irta`siro`tkazmayyizimnifunksionalliginio`zgartirishimkoniyati
Dizayn muammosi – optimizatsiya dizayni metrikasi
Umumiy metrikalar (davomi)
– Vaqt prototipi: tizimni ishchi versiyasini yaratish uchun vaqt kerak
– Bozorgachiqishvaqti: klientlargabo`shatishvasotishgaqadartizimgaishlovberishuchunvaqtkerak
– Tuzatish yaroqliligi : o`zining birinchi ishlab chiqarilganidan so`ng tizimni o`zgarish imkoniyati
– Boshqa ko`plab xavfsizlik, to`g`rilik,
Metrik dizayn konkursi – birining ko`tarilishi boshqasining yomonlashishiga olib kelishi mumkin
Metrik dizayn optimizatsiyasi uchun ikkala programmali ta`minlash va qurilma bilan ekspertiza kerak
– Qandoq yaxshi faqat apparatli yoki programmali ekspert emas
– Dizayner qo`llashda va cheklashda yaxshisini tanlashi uchun har xil texnologiyalarni ishlatishida qulay bo`lishi kerak
Bozorga chiqish vaqti: talab etilgan dizayn metrikasi
Vaqt, nuqtagacha ishlab chiqarish uchun kerak, u klientlarga sotilgan bo`lishi mumkin
Bozor oynasi
– Davr bu qaysidir oraliqda mahsulot yuqori sotilish darajasida bo`lishidir
Bozorni o`rtacha chegaralanish vaqti taxminan 8 oyni tashkil etadi
To`xtalishlar qimmatga tushishi mumkin
 |
Bozorga chiqish vaqtida to`xtalishga bog`liq yo`qotishlar
Soddalashtirilgan foyda modeli
– Mahsulotni amal qilish muddati= 2W, W bo`lganda pikdir
– Bozorga kirishni taqdim etuvchi, bozorga chiqishni uchburchak aniqlaydi
– Uchburchak maydoni foydaga tengdir
Yo`qotish
– Vaqt bo`yicha va to`xtalish bo`yicha farq uchburchak doirasidadir
 |
Maydon =
1/2 * ombor * balandlik
Vaqtga = 1/2 * 2W * W
To`xtalish = 1/2 * (W-D + W) * (W-D)
Foydani yo`qotish foizi = (D (3W-D) / 2W2)*100%
Ba`zi misollarda sinab ko`ring
– Yashash vaqti 2W=52 wks, to`xtalish D=4 wks
– (4*(3*26 –4)/2*26^2) = 22%
– Yashash vaqti 2W=52 wks, to`xtalish D=10 wks
– (10*(3*26 –10)/2*26^2) = 50%
– To`xtalishlar qimmatbaho hisoblanadi!
 |
NREva birliklar bahosi metrikalari
Xarajatlar:
Birliklarbahosi: NREbahosinihisoblamasdanharbirtizimninusxasinitayyorlashdagipullikbahosi
NREbahosi (takrorlanmaydiganinjenerlibaholar):tizimniproyektlashnibirmartalikpullikbahosi
Umumiybahosi = NREbahosi + birlikbahosi * # birliklar
za sebestoimost produksii = umumiybahosi / birliklarsoni
= (NREbahosi / birliklarsoni) + birlikbahosi
Masalan
– NRE=$2000, birlik=$100
– For 10 units
– Umumiy bahosi = $2000 + 10*$100 = $3000
– Tovar uchun bahosi = $2000/10 + $100 = $300
NRE va birliklar bahosi metrikalari
Xarajatlar texnologiyasini - - yaxshisi soniga solishtirishga bog`liq bo`ladi
– A texnologiya: NRE=$2,000, birlik=$100
– B texnologiya : NRE=$30,000, birlik=$30
– C texnologiya : NRE=$100,000, birlik=$2
 |
Metrik dizayn unumdorligi
Keng ishlatiluvchi tizim choralari, keng foydalanish
– Soat chastotalarida sekund bilan ko`rsatmalar yaxshi chora emas
– Masalan raqamli fotoapparat – foydalanuvchi uni tez tasvirni qanday ishlashi haqida qayg`uradi, taktli chastotasi yoki sekudlardagi ko`rsatmalariga emas
Kutish vaqti (javob vaqti)
– Vazifani boshlanish va tugallanish oraliq vaqti
– Masalan, A va B kamera tasvirni 0.25 sekundda ishlaydi
O`tkazish qobilyati
– Sekundiga vazifalar, masalan, A kamera jarayonida sekundiga 4 tasvir
– O`tkazishqobilyatikattabo`lishimumkin, paralelliktufaylikutishvaqtianiqlanishimumkin, masalan, Bkamerasekundiga 8 tatasvirishlashimumkin (oldingiolingantasvirsaqlanayotganvaqtda, yangitasvirnioladi).
S bo`yicha B tezlik = B ning chiqishi / A ning chiqishi
– O`tkazish qobilyati tezligi = 8/4 = 2
O`rnatilgan tizim uch kalitli texnologiyalari
Texnologiya
– Asosan texnik jarayonlarni, usullarni yoki bilimlarni ishlatgan holda vazifalarni bajarish harakati
O`rnatilgan tizim uchun uch kalitli texnologiyalar
– Protsessor texnologiyasi
– IC texnologiyasi
– Loyihalash texnologiyasi
Protsessorli texnalogiya
Hisoblash dvigateli arxitekturasi oddiy funksionallik tizimini amalga oshrishni nazarda tutgan
Protsessor qayta dasturlanadigan bo`lnasligi kerak
– “Protsessor” umumiy belgilangan protsessorga teng emas
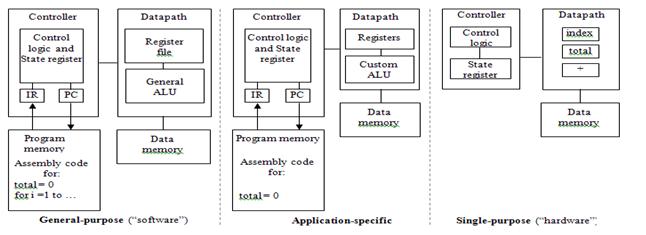
• Protsessorlar hal qiluvchi vazifa uchun o`zining sozlashlari bo`yicha farqlanadi.
Umumiy vazifalar protsessorlari
Turli qo`llanish sohalarda dasturlanuvchi protsessorlar ishlatiladi
– Yana “mikroprotsessor” kabi tanilgandir
Afzalliklari
– Programma xotirasi
– Katta fayl registri bilan asosiy DataPath va umumiy ALU
Foydalanuvchilar uchun afzalliklar
– Bozorga optimal chiqish vaqti va NRE xarajatlari
– Yuqori qayishqoqligi
Eng taniqlisi “Pentium” ammo yana boshqa yuzlab boshqalari ham bor
Maxsuslashtirilgan protsessorlar
Raqamli sxema tekis bitta dasturni bajarish uchun ishlab chiqarilgan
-Tezlashtiruvchi yoki periferiyali a.k.a. mikroprotsessori
Afzalliklari
-Faqat bitta dasturni bajarish uchun kerak bo`lgan komponentni saqlaydi
-Dastur xotirasi yo`q
Ustunligi
 -Tez
-Tez
-Past kuchlanishli
-Kichik o`lchamdaligi
Maxsus – amaliy protsessorlar
Umumiy xarakteristikalarga ega bo`lgan aniq ilovalar sinfi uchun optimallashgan dasturlanuvchi protsessor
-Universal va tor ixtisosli protsessorlar o`rtasidagi murosa
Afzalligi
-Dasturiy xotira
-Optimallashgan datapath
-Maxsus funksional bloklar
Ustunligi
-Maxsusqayishqoqlik, yaxshiishlabchiqaruvchanlik, o`lchamivaquvvati
IC texnologiya
Raqamli (zanjir – pog`ona)ni amalga oshirish IC da namoyon bo`ladi
-IC: mikrosxema yoki “chip”
-O`zining dizayni sozlashlari bilan IC texnologiyalari farqlanadi
-IC ko`plab qatlamlardan tashkil topgan (10 yoki undanda ko`proq bo`lishi mumkin)
Kim va qachondir qurilgan qatlamidan IC texnologiyalari har biridan farqlanadi
IC texnologiyalarini uchta turi
-Full-custom/VLSI
-Semi-custom ASIC (ventilli matritsa va standart yacheykalar)
PLD (Programmalashtiriluvchi logik qurilma)
Full-custom/VLSI
Barcha qatlamlar o`rnatilgan tizimni maxsus raqamli amalga oshirishlar uchun optimallashtirilgan
-Tranzistorlarni joylashtirilishi
-Tranzistorlarni o`lchamlari
-Simni marshrutizatsiyasi
Ustunligi
-Yaxshi unumdorlik, katta bo`lmagan o`lchamlar, kickik quvat
Kamchiligi
NRE ning yuqori qimmatligi (masalan, 300 ming $), uzoq vaqtdan so`ng bozorga chiqishi
Semi-custom
Quyi qatlamlar butunligicha yoki qisman qurilgan
-Ishlab chiqaruvchilar marshrutizatsiya simlari va bir necha bloklarni joylashtirish bilan qoldiriladi
Afzalligi
-Yaxshi unumdorlik, yaxshi o’lcham, full-custom ni amalga oshirishdan ko`ra NRE qimati kamroq (ehtimol 10 ming $ ga 100 ming $ )
Kamchiligi: Hali ham oylar uchun ishlab chiqarishni talab etiladi.
PLD (Programmalashtiriluvchi logik qurilma)
Barcha qatlamlar hozirda mavjud.Ishlab chiqaruvchilar IC ni qo’lga kiritishlari mumkin
Talab etilgan funksionallikni amalga oshirish uchun IC ga ulanish yaratilgan yoki yo`q qilingan. Massiv o’rniga logik elementni dasturlash ancha tanilgan (FPGA
Afzalligi: NRE ni past qiymatligi, IC ni deyarli bir lahzada borligi
Kamchiligi: Kattaligi, qimmatligi (ehtimol, birlik uchun 30$), energosig’imligi, sekinligi.
Mur qonuni
O’rnatilgan tizimlardagi ancha muhim tendensiya
-Intel ishtirokchisi Gordon Mur 1965 – yilga prognozlashtirgan
Oxirgi bir necha o`n yillik mobaynida IC tranzistor quvvati taxminan har 18 oy davomida 2 baravar ortdi.
 |
-Ko’p odamlarni yetalicha baho bermasligi bu sur’atda o’sishini tasavvur eta olishmagan
-Qancha ajdodlar 20 avloddan oldin
Taxminan, qancha odam tirik 1500 ta ketganlardan sizlarni yaratish uchun kerak bo`lgan?
220 =1 million odamga qaraganda ko’p
-(Bu yetarlicha baho bermaslik piramidalarga kalit hisoblanadi!)
Mur qonuniyatini grafik tasviri
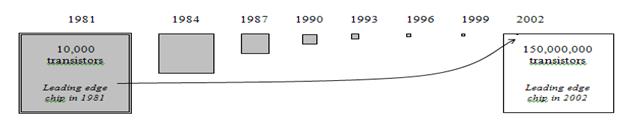
Unda odatda nima ko`p odamlarga qaraganda ikki baravar tezroq o`sadi!
– 2002 – yildagi chip 1981 – yildagi chiplarning 15000 tasini o`z ichiga joylashtirishi mumkin
Dizayn texnologiyalari
Unda biz qanday ko`rinishda bizning konsepsiyamizni realizatsiyada tizimlarni xohlagan funksional imkoniyatlariga o`zgartira olamiz
Eksponensialo`sishningloyihalashunumdorligi
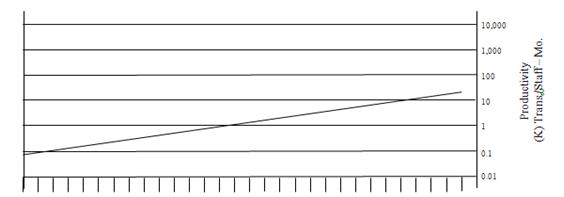
O`tgan bir necha o`n yillikdagi o`sish ko`rsatkichlari
Birgalikdagi loyihalash pog`onasi
Avvaliga :
– Apparat va dasturiy ta`minot dizayn texnologiyalari turli xil bo`lgan
– hardware and software da oxirgi birlik chiqishining sintez rivojlanishiga imkon beradi Apparat ta`minoti/ dasturiy ta`minot birlik loyihalashidir
Mustaqil protsessorlar va IC
texnologiyalar
Asosiy murosa
– Umumiy va maxsuslashtirilgan
– Xususan protsessor texnologiyalariga yoki IC texnologiyalar
– Bu ikki texnologiyalar mustaqil hisoblanadi
Loyihalashdagiuzilish unumdorligi
Oxirgi o`nyillik vaqt davomidagi dizaynerlik unumdorligi taassurotli sur`atlarda oshdi, biroq quvvat chiplari bilan sur`at yaxshilanishi ulgurmayapti.
Dizaynning oraliq unumdorligi
1981
 Yilda chipni old chegarasi 100 dizaynerlik
oylarini talab qilgan 10,000 / 100tranzistorlar/oylar
Yilda chipni old chegarasi 100 dizaynerlik
oylarini talab qilgan 10,000 / 100tranzistorlar/oylar
2002 yildachipni old chegarasi 30000 dizaynerlik oylarini talab qilgan150,000,000/5000 tranzistorlar/oylar
Loyihalovchi M. uchun 1$ dan M. uchun 300$ gachaqiziqishbaholangan
Nazorat savollari.
1. Dizaynning aniq maqsadi nimadan iborat.
2. O`rnatilgan tizimlarniga misollar keltiring.
3. Maxsuslashtirilgan protsessorlarning afzalligi.
4. Protsessor qanday turlari mavjud.
Mavzu: Murakkab o‘rnatilgan tizimlar misollari.
Reja:
1. Murakkab o‘rnatilgan tizimlar ko‘llanilanish soxalari.
2. MO‘T da ishlatiladigan protsessorlar va dasturiy ta’minot.
3. Taymer- Vaqt intervali.

O‘rnatilgan tizim-maxsus tizim uchun mo‘ljallangan
bo‘lib,xisob elementi boshqarish qurilmasiga butunlay
qurilmaga o‘rnatiladi.Ushbu duxovoy shkaf TMIO
ConnectIO o‘rnatilgan tizim xisoblanadi.Tayyorlashdan
oldin maxsulotlarni sovitishi xam mumkin.Ularni
uzoqdan Internet yoki telefon orqali boshqarish mumkin.
U OS Windows Embedded CE OS foydalanadi.Uyga
ketayotib unga telefon qilsangiz bas,u ovqatingizni
 tayyorlab qo‘yadi. MO‘T elektron qurilma
bo‘lib,tadbiq etishda kompyuterdan foydalaniladi.MO‘T dan
foydalanuvchi xattoki foydalanayotgan qurilmasida kompyuter borligini bil-
maydi. PK dan farqli dastur kodi ROM da saqlanadi,qattiq diskda emas .
Foydalanuvchi yangi dastur yaratmaydi.Tish щetkasidagi MK dasturiy boshqa-riladi.yuqori
sifatli avtomobillar yuzdan ortiq o‘rnatilgan MK ga ega.
tayyorlab qo‘yadi. MO‘T elektron qurilma
bo‘lib,tadbiq etishda kompyuterdan foydalaniladi.MO‘T dan
foydalanuvchi xattoki foydalanayotgan qurilmasida kompyuter borligini bil-
maydi. PK dan farqli dastur kodi ROM da saqlanadi,qattiq diskda emas .
Foydalanuvchi yangi dastur yaratmaydi.Tish щetkasidagi MK dasturiy boshqa-riladi.yuqori
sifatli avtomobillar yuzdan ortiq o‘rnatilgan MK ga ega.
Qo‘llaniladigan soxalar
Aviatsionnыe & Voennыe sistemы: Avtopilotы samoletov, avionika i navigatsionnыe sistemы, sistemы avtomaticheskoy posadki, sistemы navedeniya, upravlenie dvigatelem.
Avtomobili: Upravlenie dvigatelem, antiblokirovochnыe tormoznыe sistemы, protivobuksovochnaya tormoznaya sistema, upravlenie podushkami bezopasnosti, upravlenie sistemoy obogreva i konditsionirovaniya vozduxa, navigatsiya GPS, sputnikovoe radio, sistemnaya diagnostika
Kommunikatsiya: Kommunikatsionnыe sputniki, setevыe marshrutizatorы, kommutatorы, konsentratorы.
Promыshlennoe oborudovanie: Upravlenie liftami, sistemы nablyudeniya, robotы, stanki s ChPU, programmiruemыe logicheskie kontrollerы, promыsh- lennыe sistemы avtomatizatsii i upravleniya.
MO‘T yana bir afzalliklari aniq vaqt ichida ishlash
Misol tariqasida avtomobilning xavfsizlik yostiqchasini olamiz.Xavfsizlik yostiqcha datchiklari xavfni sezishi bilan 10ms ichida xavfsizlikni ta’minlashi kerak,aks xolda xaydovchi rul yoki g‘ildirakka urilib ketadi.
2 xil tizim mavjud
1.Yumshoq tizim(pleer multimedia)
2.Qattiq tizim(aniq belgilangan vaqtda ishlaydigan tizim)
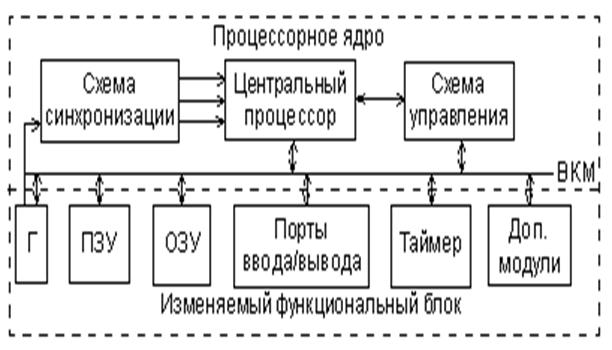
Protsessorli yadro o‘zida jamlagan:
-markaziy protsessor;
-Ichki kontroller magistrali(MSh,ASh,BSh);
-MK sinxronizatsiyalash sxemasi;
-MK ish rejimlarini boshqarish sxemasi,(MK boshqarish(qayta yuklash) kam sarflanadigan elektr ta’minotini jamlagan)
O‘zgaruvchan funksional blok o‘zida:xajmi va turli tipdagi xotira moduli, takt generatori moduli(G), taymerni jamlagan.Oddiy MK larda uzilishlarni qayta ishlash moduli protsessor yadrosi tarkibiga kirgan.Murakkab MK larda yuqori imkoniyatlarga ega bo‘lgan aloxida modulga ega.O‘zgaruvchan funksional modul tarkibiga kuchlanish komparatori,ARO‘(ASP) v.b kiradi.
Xar qanday modul MK ish jarayonini protokol asosida ishlash imkoniyatlarini yaratadi.
MKni modulli tashkillashtirish
Kiritish-chiqarish portlari.
Xar bir MK bir qancha kiritish-chiqarish liniyalariga ega bo‘lib,ular ko‘p razryadli(8-razryadli)parallel kiritish chiqarish portlariga ulangan.MK xotirasida xar bir kiritish-chiqarish portlari o‘z adreslariga ega.Kiritish-chiqarish portlari ma’lumot registrlariga murojaat komandalari xotira ma’lumotlariga beriladigan komandalar asosida beriladi.
Undan tashqari ko‘pchilik MK larda aloxida port razryadlarini tekshirish va ularga murojaat qilish imkoniyatlari xam mavjud.
Funksiyalardan foydalanishga qarab quyidagi parallel portlarni ajratish mumkin:
1. Bir yo‘nalishli portlar,ma’lumotlarni faqat kiritish yoki faqat chiqarish uchun ;
2.Ikki yo‘nalishli portlar,MK ni initsializatsiya qilish davrida aniqlanadigan kiritish yoki chiqarish ;
3. Multipleks portlar.Portlarning aloxida liniyalari MK ning biriktirilgan pereferiya qurilmalari bilan birga ,bulardan taymer,ASP,ketma-ket interfeys kontrollerlari ishlatiladi ;.
4. Kiritish-chiqarish bufer sxemotexnik boshqaruv dasturlanuvchi portlari
Portlarning vazifasi vaqtinchalik MK larni ma’lum ob’ekt bilan aloqa o‘rnatish uchun foydalaniladi.
Parallel portlar asosida MK va tashqi qurilmalar bilan ma’lumot almashish algoritmi 3 ta tip algoritmiga ajratiladi:
1. Oddiy dasturiy kiritish-chiqarish;
2. Strobli kiritish-chiqarish;
3. Ma’lumot almashishni to‘liq tasdiqlovchi kiritish-chiqarish rejimlari;
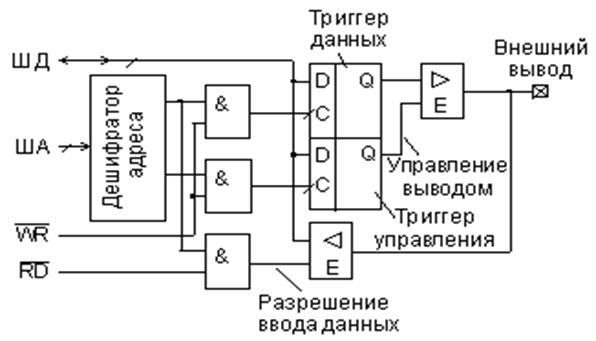
MK ikki yo‘nalishli kiritish-chiqarish portlari sxemasi.
Boshqaruv triggeri ma’lumotlarni tashqi qurilmalarga chiqarishga ruxsat beradi.
Shuni inobatga olish kerakki,ma’lumotlarni kiritishda trigger tarkibidagi ma’lumotlar emas,balki tashqi chiqishdagi signallar miqdori sanaladi.Agar MK chiqishlari turli tashqi qurilmalarga ulangan bo‘lsa,ular kutilayotgan trigger qiymatlari bilan birga olinadi yoki(kvaziikki yo‘nalishli) deb ataladi.Bunday tashkillashtirish «montajlangan I»qurilma sxemasi shinalari xosil qiladi.
Taymer.
Ko‘p vazifalar MK ish jarayonini ma’lum vaqt mobaynida bajarilishiga qarab baxolanadi. Markaziy protsessorda ma’lum vaqt mobaynida signallar ishlab chiqarish effektiv natijani bermaydi,shuning uchun zamonaviy MK larda taymerlardan foydalaniladigan apparat ta’minoti zarur bo‘ladi.
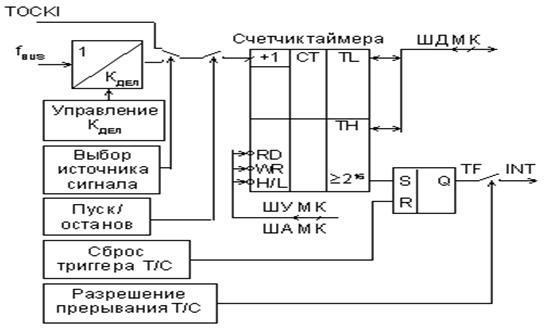
MK tarkibidagi 16-razryadli modul taymer/xisoblagich strukturasi
Taymer moduli 8-razryadli MK da
8 yoki 16 boshqaruv sxemali xisoblagichga ega.Sxemotexnikada tashqi qurilmalardan ma’lumotolish rejimi xisoblagichi ko‘rinishida tushunilgani uchun ,ularni taymer/xisoblagich deyiladi.
MK xotirasidagi 16-razryadli xisoblagich 2-ta registr bilan tasvirlanadi:
-TH- xisoblagich katta bayti
-TL-kichik bayt
-Registrlar yozish va o‘qishga mo‘ljallangan.
Xisob yo‘nalishii –to‘g‘ri xisob,ya’ni kirish signallari tushishi bilan xisoblagich tarkibi faqat inkrementlanadi.
Xisoblagich quyidagi kirish signallari manba’sidan foydalanadi:
1. fBUS chastota bo‘lgichlar chiqishidagi impulslar ketma-ketligi; (taymer rejimi deyiladi)
2. TOCKIkontroller kirishiga kelib tushadigan tashqi ma’lumot signallari(xodisalar xisob rejimi)
Razryadlar setkasi to‘lib ketganda TF trigger “1”rejimiga o‘rnatiladi,u esa o‘z npavbatida uzilishlarni tashkil qilishga so‘rov beradi.To‘xtatish yoki ishlatish dasturiy boshqarish orqali amalga oshiriladi.Dasturiy boshqarish bilan xisob,ixtiyoriy xolatlarini boshqarish mumkin.
Keltirilgan “klassik”xisob/taymer sodda MK larda foydalaniladi.
Kamchiligi :
1 - boshlash va to‘xtatish komandalari bajarilish jarayonida interval oralig‘ida xatoliklarning xosil bo‘lishi.
2 - (Kdel/fBUS) · 216 to‘liq xisob koeffitsienti davrida vaqt intervallari ishlab chiqarish qiyinligi.
3- bir vaqtning o‘zida bir necha kanallarga xizmat ko‘rsata olmaslik.
Ushbu kamchiliklar MK oilasiga mansub MCS-51 (Intel) bartaraf qilingan.
Razryadlar setkasining to‘lib ketganligida qo‘shimcha xisob liniyalarining tashkillashtirilganligidadir.Bunday kamchiliklarning yo‘qligi xisob davrida to‘lib ketganligini avtomatik ravishda ixtiyoriy qayta yuklanishiga olib keladi.
MK quyidagi yo‘nalishlarga :
-xisob/taymer modul qiymati oshishi. MCS-51 strukturali MK , Mitsubishi va Hitachi kompaniyalari MK
- xisob/taymer moduli modifikatsiyalari.Xisoblagichlar sonini oshishi bilan apparat ta’minotlari kirishni tashkillashtirish (input capture — IC) va chiqishni solishtirish (output compare — OC) asosida kanallar sonining ko‘payishiga olib keladi. Bunday yo‘nalish Motorola kompaniyalariga tegishli.
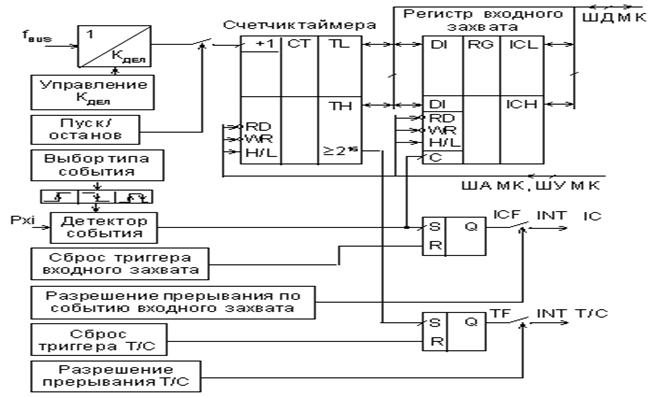
Kirishni tashkillashtirish xisob taymer struktura sxemasi
Voqealar detektori(detektor sobыtiya ) MK kirishidagi kuch pog‘onasini nazorat qiladi.Ko‘pincha kiritish/chiqarish portlaridan biri.Mantiqiy «0» signalni «1» ga yoki aksi,xolatlarida yozish strobini tashkil qilib,16-razryadli registr kirishini tashkil qiladi.
ularga:
musbat (peredniy) signal fronti;
Manfiy (zadniy) signal fronti;
Mantiqiy signal pog‘onasining ixtiyoriy o‘zgarishi.
Voqealarni tashkillashtirish taymerini initsializatsiya qilish davrida bajariladi va dastur bajarilish davrida bir necha marta o‘zgarishi mumkin.Xar bir o‘zgarish bayroq registrining ICF kirishlarida «1» pog‘onasini o‘rnatilishiga sabab bo‘ladi.Triggerlar xolatlari asturiy boshqarish yo‘li bilan o‘zgarishi mumkin,agar uzilishlarga ruxsat etilsa –uzilishlarga so‘rov INT IC ishlab chiqariladi.
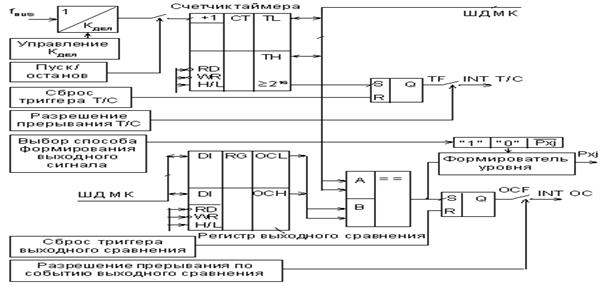
Chiqishni solishtirish taymeri kanali struktura sxemasi
Raqamli komparator xisob/taymer kirish kodi bilan 16-razryadli registr tarkibidagi chiqish kodlarini solishtiradi.Solishtirish davrida tenglik xosil bo‘lsa,MK chiqishlaridan biridagi (Pxj)mantiqiy signalni o‘rnatadi.Asosan 3-ta chiqishni solishtirish(Pxj) ajratiladi:
-yuqori mantiqiy pog‘onani o‘rnatish;
- quyi mantiqiy pog‘onani o‘rnatish
- chiqishdagi signallarni invertorlash;
Solishtirish signallarining kelishi bilan mantiqiy «1» va mos solishtirish alomatlari OCF o‘rnatiladi.Kirish va chiqishlarni xisobi dasturiy boshqariladi,agar uzilishlarga so‘rov ruxsat etilsa INT OC uzilishlarga so‘rov signali ishlab chiqariladi.Chiqishdagi solishtirish belgilangan vaqtdagi vaqt intervallarini ishlab chiqish uchun ishlatiladi.Mukammalashgan apparat ta’minoti real vaqt mobaynida murakkab vazifalarni xal qilishga imkon yaratadi.
Nazorat savollari.
1.Murakkab o‘rnatilgan tizimlar ko‘llanilanish soxalari.
2.Vaqt intervallari o‘lchami nima?
3. Kiritish-chiqarish portlari to‘g‘risida umumiy malumot.
4. Garvard arxitekturasi.
Mavzu: Murakkab o‘rnatilgan tizimlar arxitekturasi.
Reja:
1. MO‘T da ishlatiladigan protsessorlar va dasturiy ta’minot.
2. Qadamli dvigatel nazorati.
MO‘T da ishlatiladigan protsessorlar va dasturiy ta’minot.
Maxsus protsessorlar
-Aniq bir masalani bajarishi
-Bir turli foydalanuvchi operatsiyalarini bajaruvchi
Noyob masalalarni yechishda foydalanuvchi tomonidan ishlab chiqarilgan
Standart bir turli masalalarni yechadigan protsessorlar
-"Off-The-shelf" – umumiy vazifalarni yechish uchun oldindan ishlab chiqilgan masalalar
• Periferiya qurilmalar
• Ketma ket uzatish
• Analog raqamli o‘zgartirgichlar
Timers, counters, watchdog timers
• Taymer: vaqt intervallari o‘lchami
- Sinxronlashtirilgan chiqish voqealarini yaratish10 s ichida yashil rangni ushlab turish
- Kirish voqealari xisobi misol, avtomobil tezligi.Takt impulslari xisobi bo‘yicha Misol, Clk oralig‘i 10 ns xisoblanadi 20000 Clk impulslar U xolda 200 mikrosekund o‘tadi 16-razryadli xisoblagich to 65 535 * 10 = 655,35 ns mks., ruxsat = 10 ns Xisoblagich: taymerdek bo‘lib, lekin u vaqtni xisoblamaydi aksincha kirish signallari impulsini xisoblaydi. misol, datchik ko‘rsatkichidagi avtomobillar soni qurilmani taymer yoki xisoblagich sifatida foydalanish

Vaqt intervali. Kerakli vaqt inervalini o‘tib ketganligini bildiradi. Xisoblagich terminalini kerakli intervalga o‘rnatish
Taktlar soni = kerakli vaqt intervali /oraliq soati. Kaskadli xisoblagichlar nomlanishi
Vaqtni bo‘lish
Imkoniyat yuqori , ruxsatni qisqartirish
|
/* main.c */ #define MS_INIT 63535 void main(void){ int count_milliseconds = 0; configure timer mode set Cnt to MS_INIT wait a random amount of time turn on indicator light start timer while (user has not pushed reaction button){ if(Top) { stop timer set Cnt to MS_INIT start timer reset Top count_milliseconds++; } } turn light off printf(“time: %i ms“, count_ milliseconds); }
|
Tugmachani bosilishi bilan chiroqni yoqilishi orasidagi vaqt 16-razryadli taymer, CLK oraliq 83,33 ns, xisoblagich xar 6 siklda osha boradi.
Ruxsat = 6 * 83,33 = 0,5 mks .
Diapazon = 65535 * 0,5 = 32,77 mikrosekund millisekund
Watchdog timer

|
/* main.c */ #define MS_INIT 63535 void main(void){ int count_milliseconds = 0; configure timer mode set Cnt to MS_INIT wait a random amount of time turn on indicator light start timer while (user has not pushed reaction button){ if(Top) { stop timer set Cnt to MS_INIT start timer reset Top count_milliseconds++; } } turn light off printf(“time: %i ms“, count_ milliseconds); }
|
Tugmachani bosilishi bilan chiroqni yoqilishi orasidagi vaqt 16-razryadli taymer, CLK oraliq 83,33 ns, xisoblagich xar 6 siklda osha boradi.
Ruxsat = 6 * 83,33 = 0,5 mks .
Diapazon = 65535 * 0,5 = 32,77 mikrosekund millisekund
Watchdog timer
 |
|
/* main.c */ main(){ wait until card inserted call watchdog_reset_routine while(transaction in progress){ if(button pressed){ perform corresponding action call watchdog_reset_routine } /* if watchdog_reset_routine not called every < 2 minutes, interrupt_service_ routine is called */ } |
|
watchdog_reset_routine(){ /* checkreg is set so we can load value into timereg. Zero is loaded into scalereg and 11070 is loaded into timereg */ checkreg = 1 scalereg = 0 timereg = 11070 } void interrupt_service_routine(){ eject card reset screen } |
Neobxodimo sbrosit taymer v kajduyu yedinisu vremeni X, inache taymer generiruet signal
Obщego polzovaniya: vыyavlyaet nedostatochnost, samovozvrat
Drugoe primenenie: taym-autы
-naprimer, bankomat
-16-razryadnыy taymer, 2 mks. razreshenie
-timereg znachenie = 2 * (216-1) = X-131070-X V techenie 2 min., X = 120 000 mks .
Serial Transmission Using UARTs
UART: universal asinxron qabul qilib uzatgich
1.Ma’lumotlarni parallel qabul qilib ketma ket uzatadi
2.Ma’lumotlarni ketma ket qabul qilib parallel uzatadi
 |
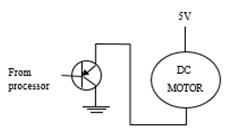
 Controlling a DC motor with a PWM
Controlling a DC motor with a PWM
|
void main(void){ /* controls period */ PWMP = 0xff; /* controls duty cycle */ PWM1 = 0x7f; while(1){}; } |
 The PWM alone cannot drive the DC motor, a possible
way to
The PWM alone cannot drive the DC motor, a possible
way to
implement a driver is shown below using an MJE3055T NPN
transistor.
 LCD controller
LCD controller
void WriteChar(char c){
RS = 1; /* indicate data being sent */
DATA_BUS = c; /* send data to LCD */
EnableLCD(45); /* toggle the LCD with appropriate delay */
}
klaviatura-kontroller
Qadamli dvigatel nazorati (kontroller shagovogo dvigatelya)
-Shagovыy dvigatel: povorot na fiksirovannoe kolichestvo gradusov, kogda dayotsya "shagovыy" signal
 -V otlichie ot dvigatelya postoyannogo
toka vraщaetsya tolko pri vklyuchennom pitanii, v rejime probega
-V otlichie ot dvigatelya postoyannogo
toka vraщaetsya tolko pri vklyuchennom pitanii, v rejime probega
Vraщenie dostigaetsya putem primeneniya
opredelennoy posledovatelnosti napryajeniya
na katushkax
• Kontroller znachitelno uproщaet eto
 |
Qadamli dvigatel nazorati (Shagovыy dvigatel s kontrollerom (voditel))
 |
|
/* main.c */ sbit clk=P1^1; sbit cw=P1^0; void delay(void){ int i, j; for (i=0; i<1000; i++) for ( j=0; j<50; j++) i = i + 0; } |
|
void main(void){ */turn the motor forward */ cw=0; /* set direction */ clk=0; /* pulse clock */ delay(); clk=1; /*turn the motor backwards */ cw=1; /* set direction */ clk=0; /* pulse clock */ delay(); clk=1; } |
Na vыxodnыx vыvodax shagovogo dvigatelya voditel ne obespechivaet dostatochnogo toka dlya upravleniya shagovыm dvigatelem. Dlya usileniya toka, bufer ne trebuetsya. Odna iz vozmojnыx realizatsiy buferov izobrajen sleva. Q1 predstavlyaet soboy tranzistor n-p-n MJE3055T i Q2 yavlyaetsya MJE2955T tranzistorom n-p-n.soedinen s mikrokontrollerom 8051 i v soedinenii s shagovыm dvigatelem.
|
/*main.c*/ sbit notA=P2^0; sbit isA=P2^1; sbit notB=P2^2; sbit isB=P2^3; sbit dir=P2^4; void delay(){ int a, b; for(a=0; a<5000; a++) for(b=0; b<10000; b++) a=a+0; } void move(int dir, int steps) { int y, z; /* clockwise movement */ if(dir == 1){ for(y=0; y<=steps; y++){ for(z=0; z<=19; z+4){ isA=lookup[z]; isB=lookup[z+1]; notA=lookup[z+2]; notB=lookup[z+3]; delay(); } } } |
|
/* counter clockwise movement */ if(dir==0){ for(y=0; y<=step; y++){ for(z=19; z>=0; z - 4){ isA=lookup[z]; isB=lookup[z-1]; notA=lookup[z -2]; notB=lookup[z-3]; delay( ); } } } } void main( ){ int z; int lookup[20] = { 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 1, 1, 1, 0, 0, 1, 1, 1, 0, 0 }; while(1){ /*move forward, 15 degrees (2 steps) */ move(1, 2); /* move backwards, 7.5 degrees (1step)*/ move(0, 1); } } |
Stepper motor without controller (driver)
 |
Odin iz vozmojnыx putey realizatsii bufera pokazan nije.8051 sam po sebe ne mojet upravlyat shagovыm dvigatelem, poetomu neskolko tranzistorov bыli dobavlenы k uvelicheniyu toka, protekayuщego na shagovom dvigatele. Q1 yavlyayutsya MJE3055T NPN tranzistorov Q3 i yavlyaetsya MJE2955T tranzistora PNP.Soedinen s mikrokontrollerom 8051 i B soedinen s shagovыm dvigatelem.
 |
Analogo-sifrovыe preobrazovateli
 |

Eng muvaffaqiyatli aproksimatsiya natijasidan foydalanib raqamlidan analogga uzgartirish.
Given an analog input signal whose voltage should range from 0 to 15 volts, and an 8-bit digital encoding, calculate the correct encoding for 5 volts. Then trace the successive-approximation approach to find the correct. encoding
5/15 = d/(28-1)
d= 85
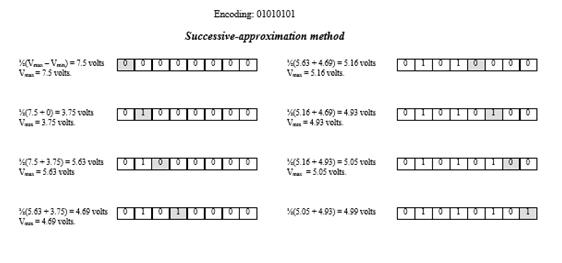
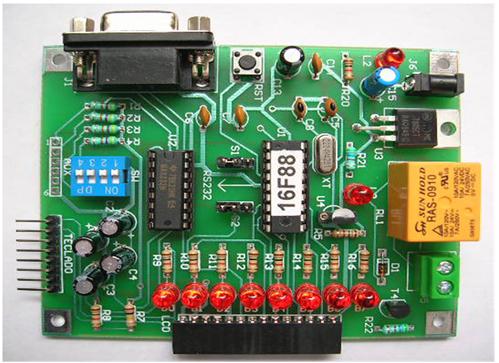
Pechatnaya plata shabloni keltirlgan.Unda ulanishlar ko‘rsatilgan.
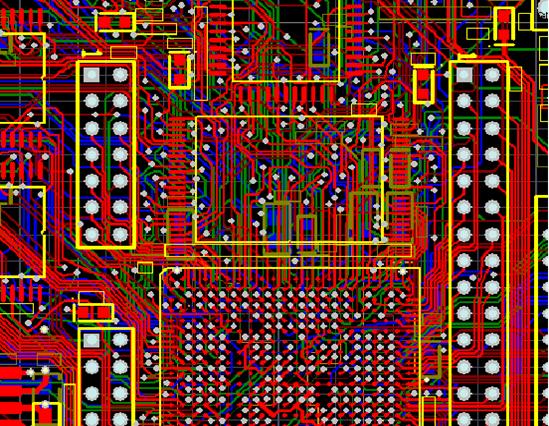
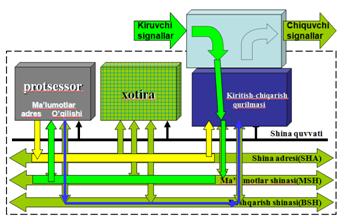
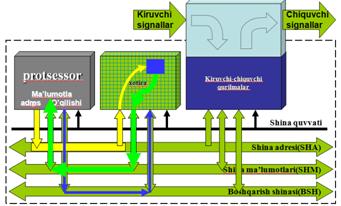
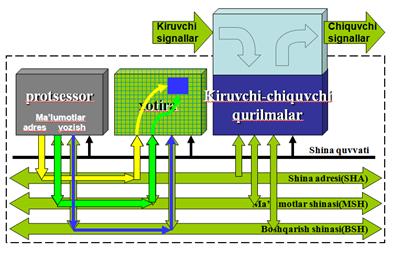
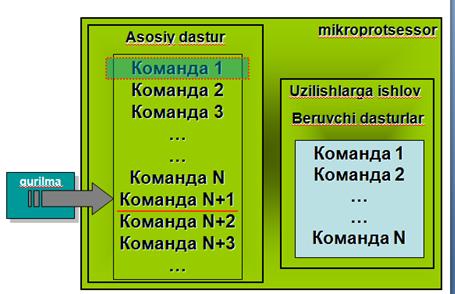
Protsessorlar ma’lumotlarni xotiraga va qurilmalarga uzatish uchun rasm 2.1. da keltirilgan shinalar orqali amalga oshiradi. Shina adres ma’lumotini saqlaydi,va shina statusi ma’lumotini,ya’ni shina orqali qanday ma’lumot bajarilayatganini(o‘qish yoki yozish).



Raqamli komparator xisob/taymer kirish kodi bilan 16-razryadli registr tarkibidagi chiqish kodlarini solishtiradi.Solishtirish davrida tenglik xosil bo‘lsa,MK chiqishlaridan biridagi (Pxj)mantiqiy signalni o‘rnatadi.Asosan 3-ta chiqishni solishtirish(Pxj) ajratiladi:
-yuqori mantiqiy pog‘onani o‘rnatish;
- quyi mantiqiy pog‘onani o‘rnatish
- chiqishdagi signallarni invertorlash;
Solishtirish signallarining kelishi bilan mantiqiy «1» va mos solishtirish alomatlari OCF o‘rnatiladi.Kirish va chiqishlarni xisobi dasturiy boshqariladi,agar uzilishlarga so‘rov ruxsat etilsa INT OC uzilishlarga so‘rov signali ishlab chiqariladi.Chiqishdagi solishtirish belgilangan vaqtdagi vaqt intervallarini ishlab chiqish uchun ishlatiladi. Mukammalashgan apparat ta’minoti real vaqt mobaynida murakkab vazifalarni xal qilishga imkon yaratadi.
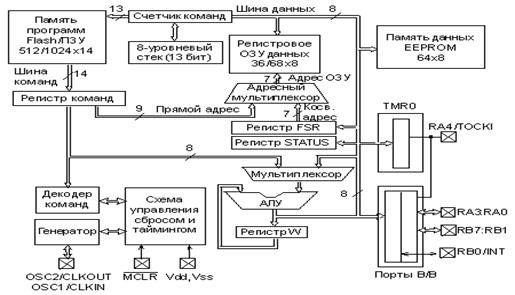
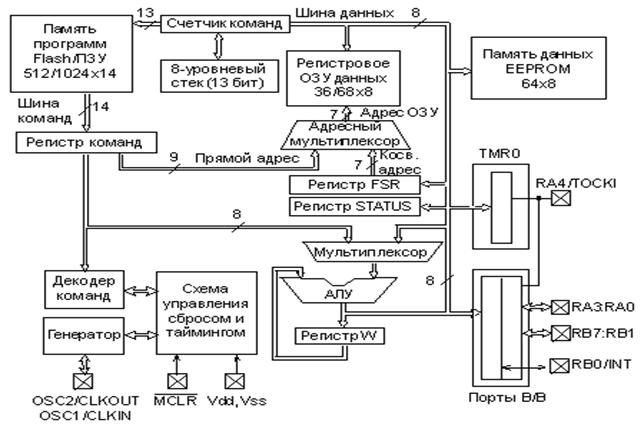
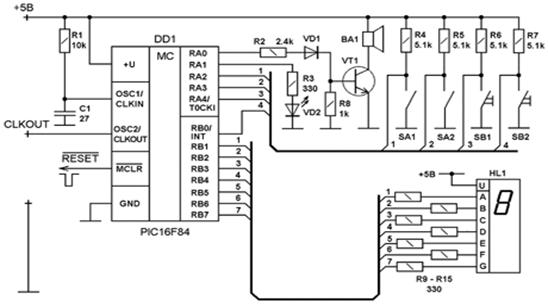
MK PIC16F8X struktura sxemasi
Garvard arxitekturasiga asoslangan bo‘lib,ma’lumot shinalari va (OZU)ma’lumot xotirasi(kengligi 8-bit), dastur shinasi va dastur xotirasi 14-bit.Bunday arxitektura bit va bayt registr operatsiyalari yuqori tezlikda ishlashga imkon yaratadi.O‘tish komandalaridan tashqari xamma komandalar bir siklda bajariladi.
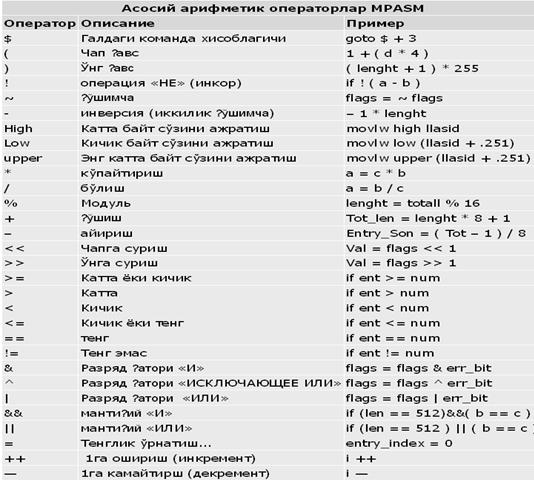
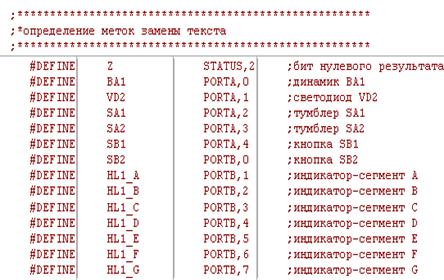
Assembler MPASM
Assembler MPASM komanda bilan chaqiriladi
MPASM [/<Option>[ /<Option>...]] <file_name>
Bu yerda /<Option> komanda tanlash; <file_name> – fayl nomi.
/<option> tanlashga ruxsat;
/<option> – to‘xtashga
ruxsat.
Metka- (labels)
Mnemonika- (mnemonics)
Operandlar- (operands)
Izox -(comments)
Misol
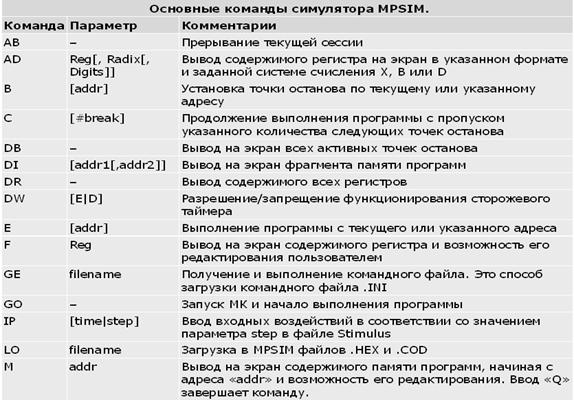
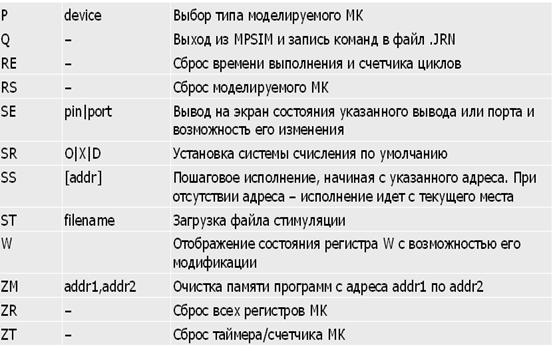
MPSIM muxiti ishga tushishi bilan MPSIM.INI fayl qidiriladi.
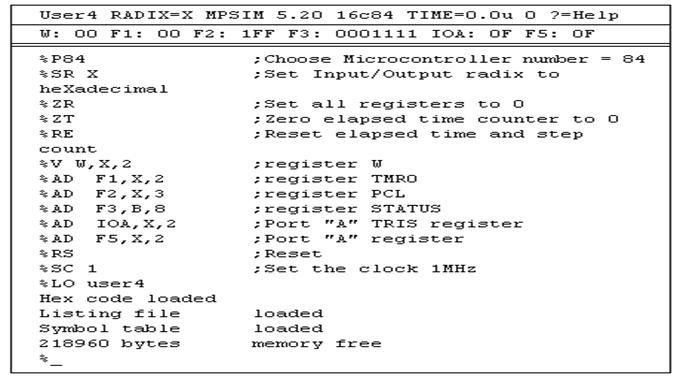
simulyator MPSIM oynasi
• Misol

“Aqilliy uyning” infrastrukturasi va elementlari

Nazorat savollari:
1.MO‘T da ishlatiladigan protsessorlarga misollar keltiring.
2.Asosiy arifmetik operatorlarni sanab o‘ting.
3.Maxsus protsessorlar xususiyatlarini ayting.
Mavzu:Mikroprotsessor asosida o‘rnatilgan tizimlar.
Reja:
1. Protsessorlarni klassifikatsiyalash
2. Mikroprotsessor strukturasi va mikroprotsessor sistemsini ish tartibi
3. Alokaning shina tuzilishi.
Protsessor – xisoblash tizimining elementi bo‘lib, belgilangan buyruqlar yordamida xotiradan komandalarni tanlash va qandaydir xarakatlarni bajarish uchun foydalaniladi. Ko‘p xollarda protsessorni dasturiy vosita xisoblab, ular ma’lumotlarni qayta ishlovchi deb xam yuritiladi.
Protsessorlarni quyidagi kriteriyalar bo‘yicha klassifikatsiyalash mumkin: tashkillashtirish funksiyalari, ma’lumotlarni qayta ishlash xarakteristikalari bo‘yicha.
Protsessor adreslar maydoni, shinalar kengligi, ma’lumotlarni qayta ishlashi, boshqaruv tizimlari bo‘yicha xarakterlanadi.
Protsessorlar bo‘ladi:
1. Dasturlanmaydigan , dasturiy tadbiq etish mavjud bo‘lmagan;
2. Dasturlanmaydigan ,lekin dasturiy tadbiq etish mavjud ;
3. Dasturlanadigan , dasturiy tadbiq etish mavjud bo‘lmagan.
Dasturlanadigan protsessor – komandalar tizimi mavjud bo‘lgan protsessor.Uni bir yoki bir necha turdagi masalalarni xal qilish uchun moslashtirish mumkin.
Dasturlanmaydigan protsessorlar funksiyalari doimiy aniqlangan.
Protsessorlar apparat bloklari yoki dasturiy boshqaruv qurilmasi prinsipi bo‘yicha moslashtiriladi.
Universal protsessorlar xaraktkrlanadi: juda ko‘p sonli komandalarni qayta ishlash; komandalar tizimi (KT): agar komandalar tizimi ixtiyoriy vazifani yechishga imkon yaratsa demak u protsessor universal. Ish jarayonida komandalar tizimini komandalar formati, adreslash usullari v.x. inobatga olish kerak.
Undan tashqari markaziy , pereferiyali va servisli protsessorlarni ajratish mumkin.
Markaziy protsessor xisoblash tizimini umumiy boshqaradi: ma’lumotlarni qayta ishlaydi,xisoblash tizimlari elementlari bilan ma’lumot almashadi,undan tashqari xisoblash tizimlari elementlari ish jarayonini boshqaradi.
Periferiyali protsessor xisoblash tizimlarini ma’lum bir funksiya qismini bajaradi: kiritish chiqarish qurilmalari bilan ma’lumot almashadi va boshqaradi, undan tashqari xisoblash protsessida xam qatnashishi mumkin(ma’lumot qismini qayta ishlaydi).
Servisli (xizmat ko‘rsatuvchi) protsessor asosan xisoblash protsessida ishtirok etmaydi va xizmat ko‘rsatish va nazorat funksiyalarini bajaradi: instrumental funksiyalarni bajaradi ( yetkazish va dasturiy ta’minotni sozlash, qurilmani sozlash, parametrlarini o‘lchash v.x.).
Ma’lumotlarni qayta ishlash guruxida "protsessor» va "kontroller» terminlari mavjud.
Belgilangan vazifaga nisbatan (elementga nisbatan, tizimga emas) protsessor kontroller vazifasini bajaradi. (ya’ni boshqaruv qurilmasini), dispetcher v.b. O‘z navbatida kontrollerlar turli xil vazfalar uchun mo‘ljallangan bo‘lishi mumkin xotira,printerning, ketma ket interfeysning, texnologik protsessning v.b.
Maxsuslashtirilgan protsessorlar
-Aniq xisoblash vazifasini bajaradi
-Bir operatsiyali foydalanuvchi protsessorlari
-Biz tomondan kadan kam bo‘lgan topshiriqlarni yechish uchun ishlab chiqilgan
-Bir o‘rinli standard belgilangan protsessorlar
-Umumiy topshiriqlarni yechish uchun “Off-The-shelf” oldinroq ishlab chiqilgan
-Perifiriyali qurilma
-Ketma-ket uzatishlar
-Analog/raqamli o‘zgartirgichlar
4 ta bazaviy prinsipga tayanish mumkin:
"jestkiy" (dasturlanmaydigan) apparat tadbiq etiladigan protsessor;
apparat tadbiq etiladigan dasturlanuvchi protsessor;
"jestkiy" dasturlanuvchi protsessor;
dasturiy tadbiqli dasturlanuvchi protsessor.
Mikroprotsessorning umumlashgan ko’rinishi.
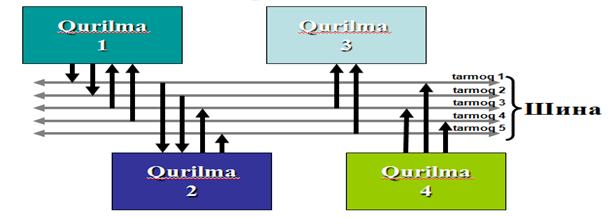
Alokaning shina tuzilishi.
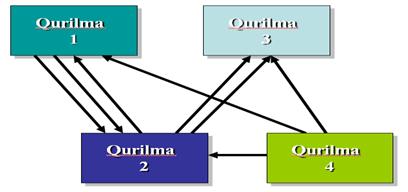
Alokaning klassik tuzilishi.
Aloqaning shina tuzilishi
shina (ing. BUS) – signal va kodlar uzatiladigan aloqa tarmoqlari guruhlari
Signallar bir xil tarmoqlar orqali uzatiladi, lekin har xil vaqt oralig’ida
(Multiplekslangan uzatilish)
Signallar ikki yo’nalishda uzatilishi mumkin (ikki yo’nalishdagi uzatilish)
Shinadagi barcha qurilmalar signallari bir xil qonun bilan uzatiladi va qabul qilinadi (almashinuv protokollari), barcha qurilmalar umumiy bir ko’rinishga ega bo’lishi kerak.
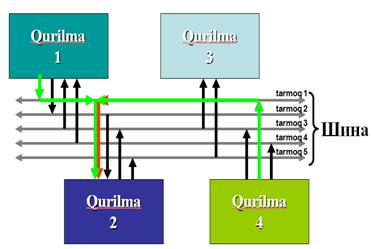
Multiplekslangan uzatish
ikki yo’nalishdagi uzatilish
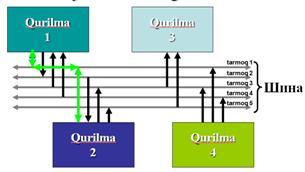
Shinali tuzilish aloqaning kamchiliklari
Klassik aloqa strukturasiga qaraganda:
Tezkorligi kamroq – signallar vaqt ichida taqsimlanib uzatiladi
shina tarmoqlariga qurilmalarni parallel ulash- qurilmaning to’g’ri qo’yilmaganligi shinani ishlamasligiga olib keladi
Ixtisoslashgan moslama kerak bo’ladi- yuborish protokoliga daraja va vaqt boshqaruvi kerak bo’ladi
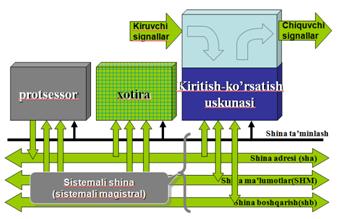
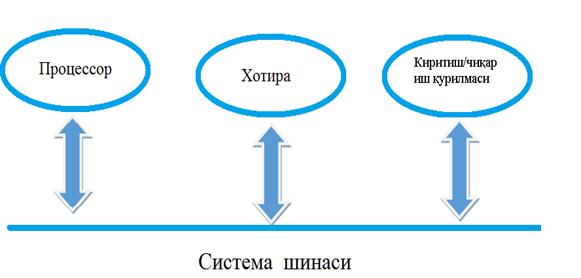
Mikroprotsessorli sistemaning tuzilishi
Shina adresi(Address Bus)
aniq bir paytda protsessor ma’lumot bilan almashinishida, moslamaning adresini aniqlashga ishlatiladi
mikroprotsessorli sistemadagi har bir moslamaga (protsessordan tashqari), har bir xotira qutisida noyob adreslar biriktiriladi
bo’lishi mumkin
- bir tomonlama yo’nalgan
- ikki tomonlama yo’nalgan
Shina ma’lumotlari(Data Bus)
Asosiy shina
Mikroprotsessorli sistema moslamalari orasida ma’lumotlarni yuborishda ishlatiladi
Axborotni yuborishda quyidagi protsessorlar ishlaydi
-ma’lumot kodini qurilma yoki xotira qutisiga yuboradi
-ma’lumot kodini qandaydir qurilmadan yoki xotira qutisidan oladi
Qurilmalar orasidagi axborot yuborilishi protsessor ishtirokisiz ham amalga oshishi mumkin
Ma’lumotlar shinasi ikki yo’naltirilgan bo’ladi
Boshqarish shinasi(Control Bus)
Boshqa boshqa boshqarish signallaridan tashkil topgan, har biri o’zining asosiy funksiyasiga ega
yozish signali va o’qish signali
-ma’lumotlarni betartib olinishi yoki yuborish uchun signallar ( qachonki ma’lumotlar shinasiga kod kiritilgan vaqtida aniqlaydi)
-ma’lumotlar olinishi haqida ta’kid signallar
-hamma qurilmalarning boshlang’ich holatiga keltiradigan signallar
-qurilmalarning izohlovchi signallari
Boshqarish shina tarmoqlari bo’lishi mumkin
-bir tomonlama yo’nalgan
-ikki tomonlama yo’nalgan
Shinani quvvati (Power Bus)
Sistema qurilmalarida quvvatni ta’minlaydi
Bir yoki bir nechta tarmoqlardan tashkil topgan va umumiy simdan tashkil topgan
Qurilma shinaga parallel ulanadi
Tashqi qurilmadan axborotni kiritilishi
Ma’lumotni xotiradan o’qishi
 Axborotni xotiraga yozish
Axborotni xotiraga yozish
Mikroprotsessor Sistemsini ish tartibi
Dasturiy almashinuv
Asosiy rejim bo’lib, u har doim ko’riladi, u siz boshqa almashinuv rejimlari amalga oshmaydi
Protsessor sistemali magistralning yakka xo’jayini hisoblanadi (Master)
Axborotni almashinish operatsiyasi (sikli)
-Faqat protsessor bilan bog’langan
-Dasturda ko’rsatilganidek ketma-ketlikda bajariladi
Protsessorning dasturdagi yo’li uzluksiz
Protsessor dasturga bog’liq bo’lmagan tashqi omillarga ta’sir qilmaydi
Dasturiy almashinuvdagi harakat
Tashqi hodisalarni sezish yo’llari
Doimiy dasturiy boshqarish yordami bilan hodisaning payti kelishi (bayrog’ sorovi usuli bilan yoki polling)
Uzlukli yordami bilan, ya’ni hozirgi paytdagi dasturni kerakli bo’lgan dasturga majburlab o’tkazish (uzlukli ishlov berish dasturi)
Xotiraga tog’ridan tog’ri kirish yo’llari bilan, ya’ni sistemali magistraldan o’chirilgandan paytida protsessorning ishtirokisiz
Uzilishlarga ishlov berish
uzilishga ishlov berilayotkandagi harakati
Uzilish rejimida quyidagi harakatlar bajariladi:Tashqi qurilmadan uzilish so’rovlarini oladi (IRQ — Interrupt ReQuest)hozirgi bo’layotgan komandani tugatadi uzilishga ishlov berish dasturiga o’tish uzilishga ishlov berish dasturi bajarilganidan so’ng, uni uzishgan nuqtasidan qayta tiklab davom ettiriladi
mikrokontrollerlar:
MPS tipining eng soda ko’rinishi,ko’p tugunlar mikrosxema ko’rinishida tuzilgan,Universalnыe (murakkab qurilmalar ro’yhatiga kiradi),Sistemali shinaga kirish mumkin emas ,Tashqi qurilmalarning ulanishi cheklangan bitta vazifani yechishga moslashgan
Kontrollerlar
MPS boshqarmasi - ixtiyoriy bo’lmagan modul ko’rinishida bajarilgan (bitta to’lov) controller tuzilishi oddiy va maksimal darajada tez harakatlanishiga moljallangan Bajarilgan dasturlar xotirada saqlanadi va o’zgarmaydi Sistemali shinaga kirish mumkin emas qoshimcha qurilma va moslamarni ulashga imkoni yo’q( kata xotira, kirish/chiqish vositalari) boshqa vazifalar yoki o’xshash vazifalarni yechish uchun
mikrokompyuterlar
Kuchliroq bo’lgan mikroprotsessorli sistemalar ,karkasda ishlab chiqiladi
Sistemali magistral ochiq , sistemali magistralga qo’shimcha qurilmalarni ulash mumkin,tashqi qurilmalar bilan o’zaro ta’sirlashuvi mavjud, ochiqroq tuzilish
axborotni saqlash vositalari mavjud ,ivojlangan vositalar foydalanuvchi aloqasi bilan, ko’p miqdordagi vazifalarga mo’ljallangan, har bir vazifaga boshidan uni boshidan moslashtirish kerak ,bajarilayotgan dasturlarni qulay o’zgartirsa bo’ladi
Mikroprotsessor sistemalari tipini tanlash
Ixtiyoriy vazifani sanab o’tilgan mikroprotsessor sistemalari tiplaridan bajarish mumkin Tip tanlaganda
-Ko’plikdan o’zini olib qochish
-Kerakli bo’lgan bikrlikni ko’rish
Mikroprotsessor sistemalari tipini tanlash
Hozirgi kunda ko’proq mikrokontrollerlar qo’llaniladi (tahminan 80%)
mikrokontroller qo’llaniladi
-mustaqil, minimal qo’shimcha apparatura bilan
-tarkibida murakkab kontrollerlar kirish/chiqish vositalari bilan
Mikroprotsessor sistemalari tipini tanlash
Klassik mikroprotsessor sistemalar mikrosxem protsessor va mikroprotsessorli komplektlar hozir ishlab chiqarish jarayonlari qiyinlashgandani uchun kamdan kam chiqadi otladki
Mikroprotsessor sistemasini ma’lum tipi mikrokontroller talab qilinayotgan talablarni bajara olmaganda qo’llaniladi
MPS shaxsiy kompyuter asosida: mikroprotsessor yadrosi tayyor,PK ni qo’shimcha qurilmalar bilan ulash kerak, Shaxsiy kompyuterda
-Dasturlashning rivojlangan vositalari (ishlab chiqaruvchinin vazifasinin yengillashtiradi)
-Axborotni eng murakkab ishlov berish algoritmini ta’minlab berishi mumkin
-PK ning asosiy kamchiliklari
-Korpusning kata razmerlari
-Oddiy vazifalarga apparatni ko’payib ketishi
-PK ko’pchiligi murakkab sharoitda ishlashga moslanmaganligidir changlanishi, yuqori namlik, vibratsiya, yuqori temperature va hokazo)
turli hil ekspluatatsiya sharoitlariga moslangan, mahsus shaxsiy kompyuterlar ishlab chiqilmoqda.
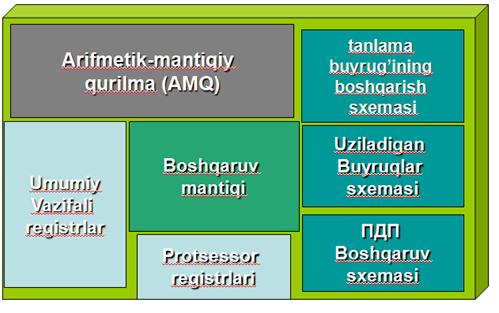
Mikroprotsessorning asosiy elementlari (qurilmalari)
ALQ – Arifmetik-logik qurilma
KOBS – Komandalarni olishni boshqarish sxemasi
UBS – Uzilishlarni bashqarish sxemasi
XTBS– Xotiraga to‘g‘ri kirishni boshqarish sxemasi
Mavzu: Mikrakontroller asosida o’rnatilgan tizimlar.
Reja:
1. Mikrakontrollerlarning umumiy tafsifi.
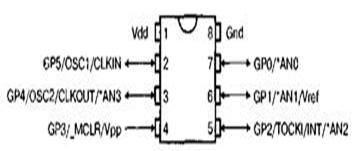
2. Mikrakontrollerlaning axborot kiritish va chiqarish portlarini tashkillashtirish.
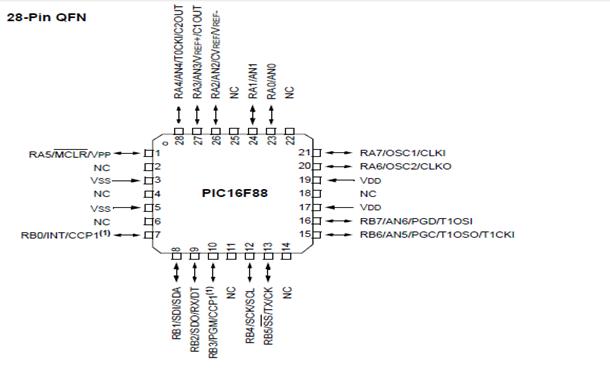
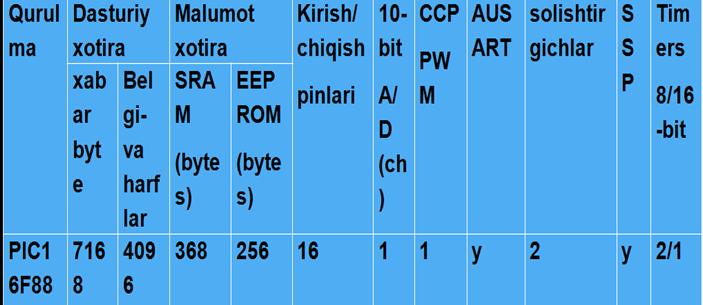
3. PIC16F88 _ mikrokantrollerining soddlashgan strukturaviy sixemasi.
4. Mikrakontroller asosida o’rnatilgan tizimlar misolida mini svetafor,Uy hayvonlari uchun elektron eshik va boshqa misollar
Mikrokontroller ( ingl. Micro Controller Unit, MCU) elektron qurilmalarni boshqarishga mo`ljallangan mikrosxema. Odatdagi mikrokontroller o`z ichiga protsessor va priferiya uskunalari, OX(operativ xotira) va DX(doimiy xotira) olishi mumkin. Oddiy masalalarni bajara oladigan yakkakristalli kompyuter deb atash ham mumkin. Mikrokontrollerlarni oddiy mikrosxemalardan farqi, ular ichiga ishlashini belgilab beradigan dastur yuklanmagan bo`lsa hech narsaga yaroqsiz kristal bo`lagiga aylanib qoladi, shu bilan birga mikroprotsessorlardan farqi yagona kristalda ishlashga tayyor tizim joylashtirilgan. Mikroprotsessor ishlashi uchun tashqi hotira, boshqa uskunalar bilan ma`lumot almashish uchun ma`lum priferiyalar ulanishi kerak, mikrokontroller tarkibida esa asosiy zarur bo`ladigan modul va uskunalar mavjud.

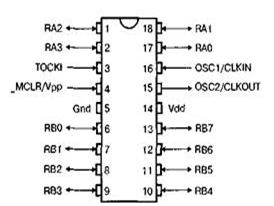
Yevropaning STMicroelectronics firmasida 1993 yilda ishlab chiqarilgan UF 62E40 Mikrokontrolleri

|
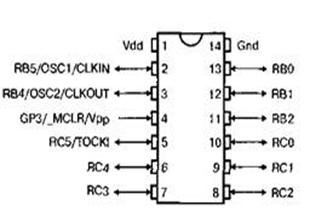
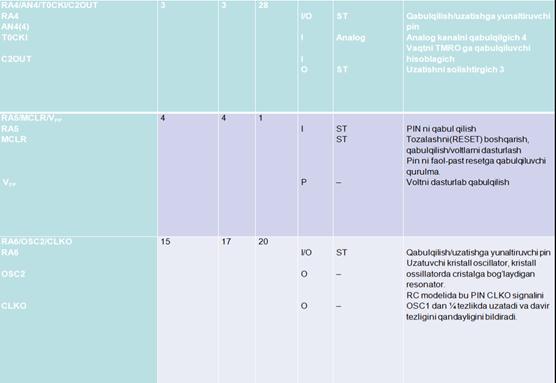
RA7/OSC1/CLKI RA7
OSC1
CLKI |
16 |
18 |
21 |
I/O
I
I |
ST
ST/CMOS(3)
– |
Qabulqilish/uzatishga yunaltiruvchi pin Qabulqiluvchi kristall oscillator, tashqi manbani qabulqilish |

Bu yerda
I= kiritish O = chiqarish I/O = kiritish/chiqarish
P = quvvat – = foydalanilmaganTTL = TTL kiritish ST
= Schmitt Triggerqabul
PIC16F88 _ microkantrollerining soddlashgan strukturaviy sixemasini keltiramiz
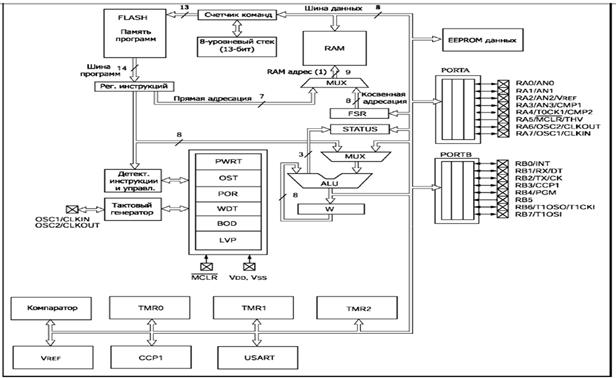
Flash program memory- xabar dasturiy xotira, Program couter – teskari dastur
Data bus – malumot tashuvchi, Level Stack – daraja to’plagich, Program Bus- dasturiy tashuvchi, RAM File Registers- RAM fayil registirlari, Instruction reg- yo’l-yo’riq kursatuvchi reg, Direct Addr- to’g’ridan- to’g’ri ADDR Instruction Decode & Control- kodsizlantirish va nazorat yo’li, Power-up Timer- vaqt buyicha quvvatlantirish, Indirect Addr- bilvosita reg
Power-on Reset- quvvatni qayta urnatish, Watchdog Timer- vaqt poyloqchisi
Brown-out Reset- jigarrang chiqishni qayta joylashtirish, Timing Generation-davriy generatsiya, Comparators – solishtirgichlar
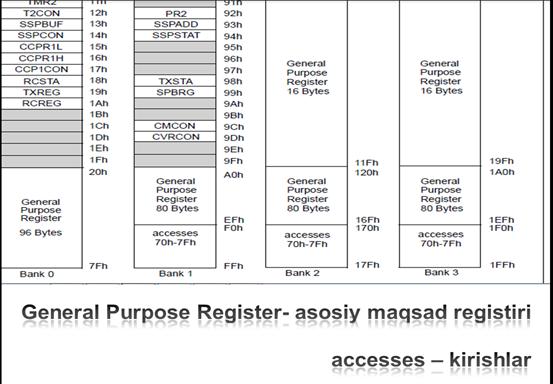
Xotira boshqaruvi(memory organization)
PIC16F88 qurulmasida 2 ta xotira bloke mavjud. Bu dasturiy xotira va malumotlar xotirasi. Har bir blokning uzining tashuvchisi bo’lib, har bir blokka kirish mobaynida oscillator sikllari sodir bo’ladi
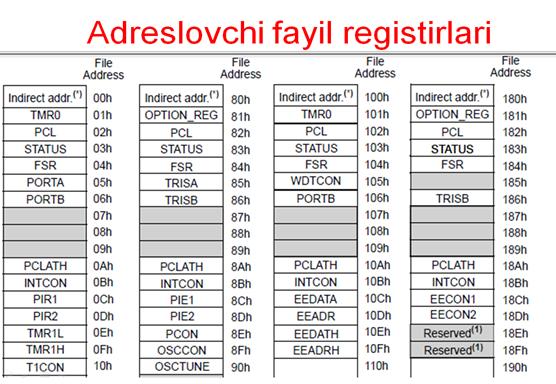
Malumot xotirasi(Data memory) Malumotlar xotirasi umumiy maqsadlar RAM va maxsus funksional regestirlarga bulingan. Operatsion regestrlar “Asos” tasvirlashni nazorat qiladi. Har bir yakka modular harakatini nazorat qilishda maxsus funksional regestirlardan foydalaniladi. Shuningdek malumotlar xotirasini malumot EEPROM xotira ham tashkil qiladi. Bu xotira malumotlar xotirasini bevosita adreslamaydi balki uzlashtirib adreslaydi. Yani yakka adresslarni aniq kursatadi va malumot EEPROM xotirasiga yozadi va o’qiydi. PIC16F88 da 256 baytlik EEPROM xotirasini 00h-FFh address sohasi mavjud.
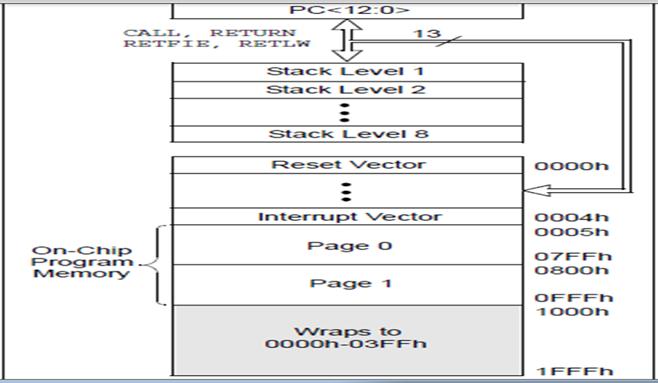
Dasturiy xotira boshqaruvi(program memory)
PIC16F88 qurulmasida teskari adresslash qobiliyatli 8K x 14 dasturiy xotira joyi mavjud. U kirish joyini aniqlash ustida adreslash fizik jarayonlarini amalga oshiradi. Misol uchun bazi kirishni aniqlashga kursatmalar: 020h, 420h, 820h, C20h, 1020h, 1420h, 1820h and 1C20h. Qayta urnatuvchi vector 0000h va xalaqit vektori 0004h dir.
 |
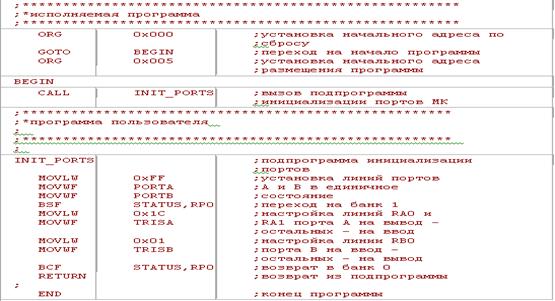
Xisob yadrosi quyidagicha ishlaydi.
MK ish dasturi FLASH xotirada saqlanadi.Dastur o’tish buyrug’i uchragunga qadar davom etadi. (RK) komanda registri joriy komandagi saqlaydi, komanda xisoblagichi (PS)navbvtdagi komandani saqlaydi.Joriy komanda tugallanishi bilan RK registri xotirasidan PS adresi bo‘yicha komanda tanlanadi.Ushbu komanda deshifratsiya qilingunga qadar dastur xisoblagichi(PS) inkrementlanadi va PS navbatdagi komandani adreslaydi.
Alomatlar registrining vazifasi komandalar xolatlarini aniqlaydi.Alomatlar xolati registr STATUS saqlanadi.Ushbu registrda xolatlar bitlari saqlanadi(nol,musbat yoki manfiy v.x.).o’tish tashkil qilinganda kerakli adreslar bo’yicha O’tish tashkillashtiriladi.
ALQ (ALU)-ma'lumotlar bilan arifmetik va mantiqiy operatsiyalarni bajaradi.Kod operatsiyasiga qarab ALQ kirishidagi ma'lumotlar :
- W registrida
-komanda registrida
Ma'lumot xotirasi strukturasi rasm 1 da keltirilgan:
Ma'lumotlar multipleksori ALQ kirishlariga mos signallarni adreslash usullari rejimiga mos uzatadi.Multipleksor adresi adreslash rejimiga qarab xotira yacheykalarini RK(to’g’ri adreslash rejimida),yoki FSR (mavxum adreslash)adreslaydi.
Konfiguratsiya bitlari MK rejimlari funktsiyasini belgilaydi:
-manbaga ulanishdagi qayta yuklanish (POR);
-manbaga ulanish taymeri (PWRT);
-generatorni ishga tushirish taymeri(OSC);
-manba kuchlanishi pasayganda qayta yuklanish (BOR);
-nazoratchi taymer(storojevoy taymer) (WDT);
-quyi voltli ketma-ket dasturlanish rejimi (LVP);
-ichki sxema rejimi (ICD).
Mini svetafor
Ota qizini bog’chasiga sovg’a qilish uchun svetofor yasashga qaror qiladi. Svetofor kontrolleri chorraxadagi 2 ta svetoforlarni signallarini boshqarishga mo’ljalangan va yo’l harakati qoidalarini o’rganish maqsadida yig’ib chiqilgan. Mazkur qurilma 12v kuchlanishda quvvat olib ishlaydi. Zaryadlash vositasi sifatida 12v doimiy tok (blok pitaniya) yoki akumlyator batareyasini ishlatish mumkin. Qurilma ATTiny2313 markali mikrokontroller asosida yig’ilgan. Kontroller o’rnatilgan generator bilan ulanadi tashqi kvarzivoy rezonator shart emas. Mikrokontroller +5v kuchlanishi DA1 tipli 7805 mikrosxemada stabillashtirilgan . Boshqarish blokida 6 ta bir xil IRLR024N turdagi polevoy tranzistorlar asosida chiqish kalitlari bor.
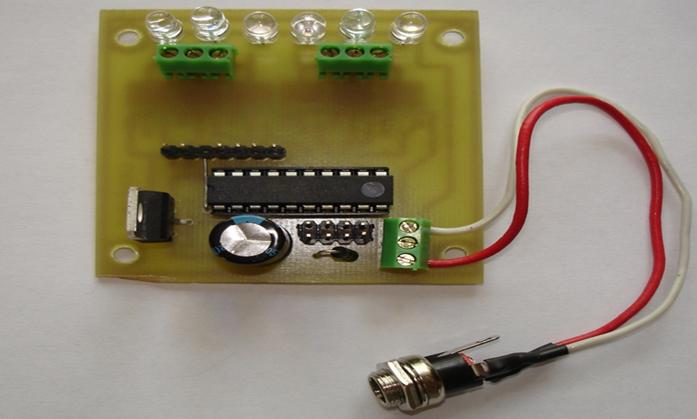


Uy hayvonlari uchun elektron eshik
Itlar uchun elektron “aqlli” eshik versiyayasi savdoda Powered Pet Door PX-1 nomi bilan paydo bo‘ldi. Mazkur eshik itga bemalol, to‘siqsiz chiqish yoki kirishga imkon beradi, biroq boshqa tashrif buyuruvchilarni: mayda sichqondan tortib, yovuz niyatli odamlargacha o’tishga yo’l bermaydi. Qurilmada bo’yinbog’iga joylashtirilgan ultratovush signalini qabul qiluvchi oddiygina mexanizm o‘rnatilgan. Mazkur qurilma nafaqat avtomatik ravishda ochilib, yopiladi, unga it yaqinlashganda, eshik harakatga kelib, lang ochiladi. Uy egasi qo‘shimcha, ya’ni qabul qiluvchining radiusini sozlashidan so’ng ma’lum masofada yaqinlashgan itga eshik ochiladi. Shuningdek, it faqat bir yo‘nalishda o‘tishi «faqat kirish» va «faqat chiqish» rejimlarini sozlashi mumkin. Hozirda PX-1 elektron eshik bahosi 270$.

Yurak ritmi datchigiga ega fitnes-treker
Basis Kompaniyasi Peak faol monitorini taqdim etdi. Qo‘l soati ko‘rinishida yangi olib yurish mumkin bo‘lgan gadjet taqdim etildi. Peak uchta uchli akselerometr, yurak urishi chastotasini sezadigan optik sensor, harorat datchiklari hamda teri — galvanik reaksiyalarni qayd etuvchi sensor bilan jihozlangan. Qurilma turli ko‘rsatkichlarni, jumladan — qadamlar soni va sarflangan kaloriyalar, yurak ritmi, terlash intensivligi, tana harorati va boshqa ko‘plab ma’lumotlarni olish imkonini beradi. Bundan tashqari, Peak uyquning sifati va davomiyligi, shuningdek, mashqlar rivoji va yakuniy natija haqida ham ma’lumot olish imkonini ham beradi.

Soat yuqori darajada kontrastli monoxrom displey bilan jihozlangan, sensorli boshqaruv bilan qo‘llab-quvvatlangan va Gorilla Glass 3 himoya oynasiga ega. Qurilmani suv ostiga 50 metrgacha chuqurlikka tushirish mumkin. Smartfon yoki planshet orqali Android yoki iOS boshqaruvida simsiz Bluetooth LE bilan foydalanish mumkin. Soat turli xabarlarni olishi va aks ettirishi mumkin. Bir marta quvvat olib, akkumulyatorli batareyada to‘rt kun ishlashi mumkin. Peak savdosi ushbu oydan boshlandi. Taxminiy bahosi — 200$.


Intel va SMSdan Audio yurak urishi ritmini o‘lchash datchiklari bilan jihozlangan BioSport In-Ear naushniklari
 Qurilma naushnik bo‘lib, nomi BioSport In-Eardir.
Kompaniyalar ma’lum qilishicha, ular «zamonaviy texnologiyalar va kundalik
turmush tarzi xususiyatlari odatiy tamoyillarini sport mashg‘ulotlariga
almashtirish bilan uyg‘unlashtiradilar». Naushniklar tovushlarni yetkazishdan
tashqari, yurak urishi ritmini optik datchiklar vositasida kuzata oladi.
Qurilma naushnik bo‘lib, nomi BioSport In-Eardir.
Kompaniyalar ma’lum qilishicha, ular «zamonaviy texnologiyalar va kundalik
turmush tarzi xususiyatlari odatiy tamoyillarini sport mashg‘ulotlariga
almashtirish bilan uyg‘unlashtiradilar». Naushniklar tovushlarni yetkazishdan
tashqari, yurak urishi ritmini optik datchiklar vositasida kuzata oladi.
Bundan tashqari, qandaydir maxsus texnolo-
giya tana harakati tufayli hosil bo‘lgan «shov-
qinli» signallarni bartaraf etadi. Shu tariqa,
yangilik eng avvalo, sport bilan shug‘ullanuvchi
insonlarga yo‘naltirilgan. Dastlabki vaqtlarda
naushniklar faqat RunKeeper ilovalari bilan
ishlaydi, biroq kelajakda qo‘llab-quvvatlovchi
servislar ro‘yxati kengaytirilib boriladi. Naushniklar
kiritilgan mikrofonga ega garnitura hisoblanadi.
IPX4 standartigacha suvdan himoyalana olishini
ham ta’kidlash lozim. Yangilik sotuvga joriy yil oxirida chiqarilishi kutil-moqda. Hozircha narxi noma’lum.
Dunyoda birinchi proyeksion Ritot smart-soatlari
Ritot smart soatlarida an’anaviy displey o‘rniga ekran sifatida charmdan foydalanilgan.
Tasvir pikoproyektor yordamida taqdim etiladi. Soatlar vaqtni ko‘rsatishdan tashqari, smartfonga ulanib, xabarlarni uzatish, qabul qilish va ularni qo‘lda taqilgan holda o‘qish imkonini beradi. SMS, elektron xatlar, ijtimoiy tarmoqlardagi xabarlar va ularni yozish, xotiraga saqlab qo‘yish, kalendar yozuvlari va ko‘plab boshqalarni taqdim etadi. Qanday xabar va ma’lumotlardan boxabar bo‘lishni xohlasangiz, soatni smartfonga sozlab qo‘ysangiz bo‘lgani.

Gadjet faqat birgina tugmacha bilan jihozlangan bo‘lib, u proyektorni ishga soladi yoki to‘xtatadi. Juda dangasalar tugmaga umuman tegmasliklari mumkin — qo‘lni silkitib qo‘ysalar bo‘lgani. Xabar va vaqt ko‘rsatkichlarini 20 turdagi ranglarda ko‘rish mumkin. Tasvir faollashtirishdan so‘ng 10 soniya mobaynida ko‘zdan yo‘qoladi. Akkumulyatorning bir martalik quvvat olishi bir oyga yoki 150 soatga yetadi. Proeksion smart-soatlarning taxminiy bahosi 160$.

3D-printer haqiqiy binoni bor-yo’g’i 24 soatda “qura oladi”
Janubiy Kaliforniya Universiteti professori Bexrok Kxoshnevich (Behrokh Khoshnevis) haqiqiy uyni bor-yo‘g‘i 24 soatda «qura oladigan» haqiqiy uch o‘lchamli ulkan bosma printerini barpo etdi, mazkur holatda qurish tushunchasi 3D-bosma jarayoni yordamida bo‘lajak bino konstruksiyasining alohida bo‘limlarini yaratishni anglatadi.
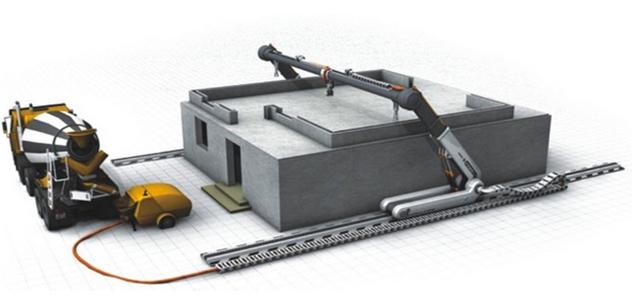
3D-printer modelida beton quyilishi amalga oshiriladigan truba o‘rnatilgan. Barcha jarayonlar kompyuterda sinxronlashtiriladi, «Contour Crafting» deb ataluvchi bloklarni tayyorlash texnologiyasi esa o‘z mazmun-mohiyatida obyektning «konturli yaratilishi» ma’nosini bildiradi. Mazmun-mohiyatiga ko‘ra taqdim etilgan yondashuv qurilish tarmog‘ini yaxlit va to‘liq o‘zgartirib yuborishi mumkin, qurilajak bino elementlarini tayyorlashni esa ko‘pchilik mazkur sohaning inqilobi sifatida baholamoqda. Ulkan aralashtirgich 3D-qurilmasini boshqarish uchun ishchi-xodim oddiy relsli-g‘ildirakni ishga solsa bo‘lgani.
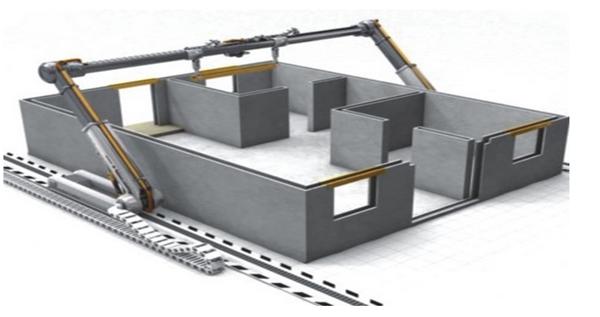
Contour Crafting uch o‘lchamli bosma tizimli apparati qurilajak konstruksiya blokiga kompyuter modeliga muvofiq aralashmani quya boshlaydi. O‘z-o‘zidan ma’lumki, 3D-printeri faqat bino devorlarinigina «qurishga qodir», eshik, oyna va kommunikatsiyalar huddi avvalgidek, ishchi kuchini talab etadi. Printerni ishlab chiqaruvchilar ularning ixtirolari qurilishning umumiy qimmatini ancha arzonlashtiradi deb hisoblaydilar. Bundan tashqari, mazkur uskunadan binoni rejali ta’mirlash yoki tabiiy ofat oqibatlarini bartaraf etishda ham foydalanish mumkin. Contour Crafting texnologiyasi bo‘yicha chop etish jarayonida qurilishni amalga oshirishda 3D-printer tamoyili asosida ishlaydi. Loyiha hozircha sinov bosqichida, biroq janob Kxoshnevich 3D-printeri quruvchilarning ish o‘rnini yo‘qotmaydi, balki ularning mehnatlarini yengillashtiradi deb ishonadi. Aksincha mazkur uskuna uni boshqaruvchi konstruksiyalar mutaxassislari uchun qurilishga qo‘shimcha ish o‘rni yaratilishini talab etadi. Bundan tashqari, qurilishga sarflanadigan mablag‘ni tejaydi.
Mashinalarga haydovchining nafasi asosida mastlikni aniqlaydigan tizim o’rnatildi
DADS (Driver Alcohol Detection System for Safety) tizimining harakat prinsipi sodda. U uch bosqichli baholash tizimidan iborat.
Birinchi turdagi datchiklar mashinaning old paneli yoki shiftiga, ya’ni, haydovchining nafasi uriladigan joyga o’rnatiladi. Havo holatini kuzatuvchi bu maxsus datchiklar juda kam miqdorda bo’lsa ham bug’langan alkogolni havoda tutsa, bu haqda bort kompyuteriga habar beradi.
Ikkinchi tur datchik rulga o’rnatilgan bo’lib, teri orqali qonda alkogol mavjudligini baholaydi.
Uchinchi tur datchik haydovchining yuz rangi, o’zini tutishiga qarab uning holatiga baho beruvchi kamera va dasturiy ta’minotdan iborat.
Tizimlar axborotining mos kelishiga qarab, kompyuter dvigatelni harakatlantirish yoki harakatlantirmaslik to’g’risida qaror qabul qiladi. Boshqacha qilib aytganda, agar haydovchi mast holatda ham mashina boshqarmoqchi bo’lsa, bu mashina harakatlanmaydi.

6- Ma’ruza
Mavzu: Protsesorlar kampleksi: chipdagi tizimlar.
Reja:
1. AVR mikrokontrollerlari madellari.
2. MK oyoqchalarining belgilanishi.
3. Mikrokontrollerlar strukturasi va ishlash asoslari.
AVR mikrokontrollerlari orasida bir qancha turli modellari mavjud 8-chiqishli korpusdan tortib 40 chiqishligacha mavjud.Eng katta afzalligi shundaki, bir turdagi imodelga mansub MK larga dastur yozib, kerak bo‘lsa o‘zgartirish kiritb boshqa turdagi MK uchun xam qo‘llasak bo‘ladi. Turli MK lar o‘z afzalliklariga ega,lekin xamma MK asosida umumiy yadro yotadi.
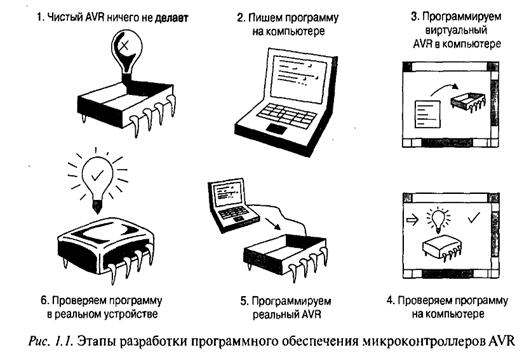
MK larga dasturlashning asosiy maqsadi boshqaruv qurilmalarini yaratishdir. Dasturlash jarayonida oddiy dasturlar va murakkab dasturladan foydalaniladi.
MK larni daturlashdagi eng asosiy aspekt registrlar xisoblanadi.

PIC mikrokontrollerlarining srukturaviy sxemasi.
Taymer.
Ko‘p vazifalar MK ish jarayonini ma’lum vaqt mobaynida bajarilishiga qarab baxolanadi. Markaziy protsessorda ma’lum vaqt mobaynida signallar ishlab chiqarish effektiv natijani bermaydi,shuning uchun zamonaviy MK larda taymerlardan foydalaniladigan apparat ta’minoti zarur bo‘ladi.
MK ish dasturi FLASH xotira dasturida saqlanadi.Dastur ketma-ket bajarilaveradi toki o‘tish komandasi uchramaguncha.(RK)komanda registri joriy komandani saqlaydi, (PS) dastur xisoblagichi keyingi komandaning adresini xisoblash uchun belgilangan.
Interfeys USART (universal sinxron-asinxron qabul qilib uzatgich) – ketma ket aloqa moduli. USART to‘liq dupleksli asinxron yoki sinxron ma’lumot uzatadi
Xar bir portlar C, D va E ikkita interfeys USART mavjud. Ular quyidagicha belgilanadiya USARTC0, USARTC1, USARTD0, USARTD1, USARTE0, USARTE1 va USARTF0.
(Universal Synchronous and Asynchronous serial Receiver and Transmitter— USART)
Mikrokontroller ATmega8535 o‘z tarkibida universal sinxron/asinxron priemoperedatchikni saqlaydi - USART. Uning yordamida kompyuter va mikrokontrollerlar ketma ket kanal bo‘yicha ma’lumot almashadi.Ilgari kompyuterlarda COM portlardan foydalanilgan.
JTAG ( angl. Joint Test Action Group; «djey-tág») . Interfeys –murakkab raqamli mikrosxemalarni ulash ,ularni testlash uchun foydalaniladi.
SPI o‘zida 4ta yo‘nalishli sinxron shinani saqlab,mikrosxemalararo sinxron ma’lumot almashish uchun foydalaniladi. i SPI qo‘zg‘aluvchan registrlar tashkil qilib,qabul qilish va uzatish funksiyasini bajaradi.
Turli mikrokontrolllar oilasi ATmega o‘rnatilgan interfeys moduli TWI bo‘lib,ular turli rejimlarda ketma ket kanallarda ma’lumot almashadi.
MK oyoqchalarining belgilanishi.
MK «oyoqchalari» misolida mikrokontroller turi PIC16F84A ko‘rib chiqiladi. MK rasmi asosida keyinchalik rasmga asosan dasturlash jarayonlari to‘g‘risida tassavurga ega bo‘lish.
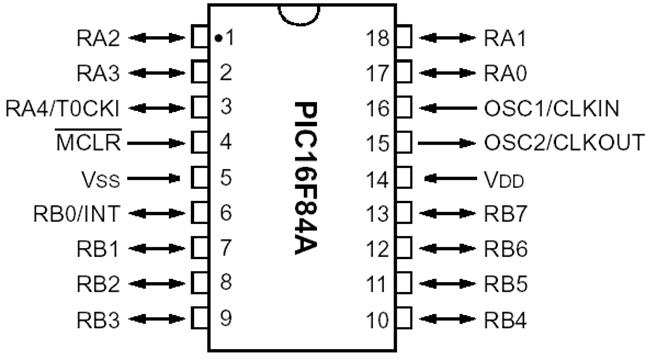
Rasmda belgilangan MK oyoqchalari faqat kirish yoki chiqishdan tashqari moslash-tirilgan vazifalarni xam bajaradi. Masalan RB0/INT.Buning vazifasi belgilanganiga qarab funksiyalardan birini bajarishiga to‘g‘ri keladi.Murakkab protsessor xolatlarida xolatlarda 3ta gacha vazifalardan birini bajaradi.Eng asosiy vazifa MK oyoqchalari ish yo‘nalishini ajrata bilish kerak.
MK oyoqchalarining funksional tavsiyasi
MK PIC16F84A.
Apparat qayta yuklanish. MCLR(4) – mikrokontroller qayta yuklanadi,qachonki signal pog‘onasi 0 volt. Sxemada ushbu MK oyoqchasini +5 volt liniyasi bilan ulaydilar.
Tayanch generator. OSC1(16) i OSC2(15) – CLKIN(16) (kirish)tashqi takt signal uchun foydalaniladi.
Chiqish CLKOUT(16) takt signallarni chiqarish uchun foydalaniladi.
Port A – RA0, RA1,
RA2, RA3, RA4 (mos, 17, 18, 1, 2, 3) kiritish chiqrish oyoqchalari. 3 oyoqchasi
taymer/xisoblagich TMR0 uchun kirish chastotasi bo‘lib xizmat qiladi.
Port V – RB0, RB1, RB2, RB3, RB4, RB5, RB6, RB7 (mos, 6, 7, 8, 9, 10, 11,
12, 13) kiritish chiqarish oyoqchalari. 6-chi oyoqchasi INT tashqi uzilishlar kirishi uchun foydalaniladi.
Mikrokontrollerlar – hisoblash asboblari, qurilmalar va har xil vazifalarda qo‘llaniladigan tizimlarda ishlatiladigan mikroprotsessorlarni eng keng sinfini tashkil qiladi. Mikrokontrollerlar bu – texnik ob’ektlarni boshqarish qurilmalarni va texnologik jarayonlarni hosil qilish uchun mo‘ljallangan maxsus mikroprotsessordir. Tuzilishi jihatidan mikrokontrollerlar, kristalda hisoblash tizimining hamma tarkib qismlari: mikroprotsessor, xotira, hamda qo‘shimcha finksiyalarni amalga oshirish uchun periferiya qurilmalari joylashtirilgan.
Mikrokontrollerli boshqaruv tizimiga mikrokontroller va u bilan boshqaruv ob’ektini ulash (biriktirish) qurilmasi kiradi.
Mikrokontroller ob’ekt bo‘yicha holat signallarini davriy so‘rab turadi va joylashtirilgan algoritmga muvofiq boshqaruv signallarini ketma-ketligini ishlab chiqaradi. Holat signallari boshqaruv signallarini joriy parametrlarini xarakterlaydi.
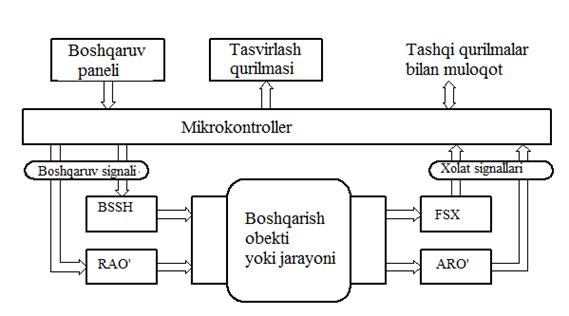
Mikrokontroller asosidagi boshqaruv tizimining odatiy tuzilishi: BSSh – boshqaruv signallarini shakllantirgichlar; BQ – bajaruvchi qurilma;
ShSh – signallar holatini shakllantirgichlar.
Mikrokontroller orqali tanlangan Boshqaruv signallari, raqamli-analog o‘zgartirgich (RAO‘) yoki boshqaruv signallarini shakllantirgich (BSSh) yordamida o‘zgartiriladi. Bajaruvchi qurilmaga (BQ) keladigan RAO‘ va BSSh chiqish siganllari mos ravishda analog va diskret boshqaruv ta’siriga ega. Tizimida yana boshqaruv paneli, indikatsiya qurilmasi va tashqi qurilma bilan ma’lumot almashtirib turish uchun interfeys bo‘lishi mumkin. Ma’lum tizimning vazifasi va xarakteristikasi qarab yuqorida ko‘rsatitilgan elementlarning ba’zi biri mavjud bo‘lmasligi mumkin.
Mikrokontrollerlar strukturasi va ishlash asoslari
Mikrokontroller bitta integral sxema ko‘rinishida amalga oshiriladigan hisoblash tizimidan iborat va o‘z ichiga yadro, dastur xotirasi, ma’lumotlar xotirasi, periferiya qurilmalari kabi asosiy bloklarni oladi (6.2-rasm).
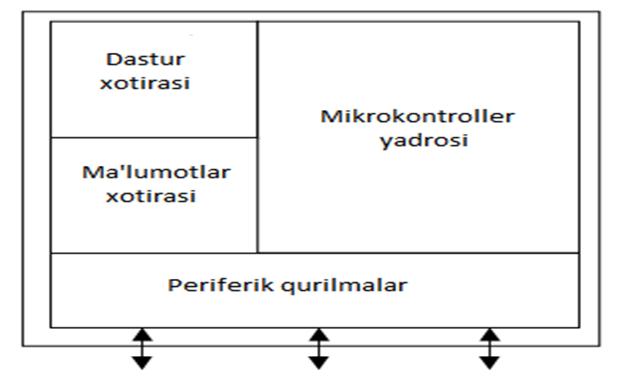
Mikrokontrollerning umumlashtirilgan tuzilmaviy sxemasi
Mikrokontroller yadrosi dastur tomonidan beriladigan boshqaruv jarayonini amalga oshiradi. Mikrokontrollerli yadro negizida integral sxemasini ishlab chiqaruvchi zavod tomonidan modulli xotira va periferiya qurilmalarining nom ro‘yxati bo‘yicha turlicha bo‘lgan, lekin komandalar tizimi va ma’lumotlar almashinuvi sikli bo‘yicha o‘zaro moslashadigan mahsulotlar ishlab chiqariladi. Ushbu belgi bo‘yicha ko‘plab moslashadigan mikrokontroller (MK) mikrokontroller turkumi deb ataladi.
Dastur xotirasi boshqaruvchi dasturni saqlash uchun mo‘ljallangan. Boshqarish jarayoni uchun zarur bo‘lgan ma’lumotlar ma’lumotlar xotirasida joylashadi.
Periferiy qurilmalari mikrokontrollerning tashqi ob’ektlari va qator boshqaruv funksiyalarini amalga oshiradigan apparat bilan birikishni ta’minlash uchun mo‘ljallangan.
Mikrokontrollerlar, boshqa klasslarning hisoblash mashinalari kabi, Garvard yoki Prinston arxitektura asosida amalga oshiriladi (6.3-rasm). Garvard arxitektura asosida bajariladigan mikrokontrollerlarda dasturlar va ma’lumotlar foydalana olishning turli metodlaridagi mantiqiy bog‘liq bo‘lmagan xotira bloklarida joylashadi. Prinston arxitektura asosida bajariladigan mikrokontrollerlarda dasturlar va ma’lumotlar xotiraning umumiy blokida joylashishi mumkin, murojaat uchun foydalana olishning yagona metodidan foydalaniladi.
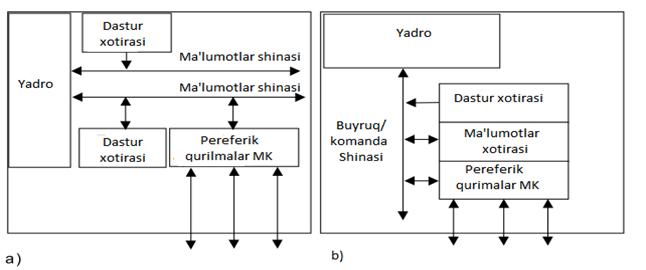
6.3-rasm. MK garvard (a) va prinston (b) arxitekturalari
Namunaviy va kristalga eng ko‘p integratsiyalanadigan periferiya qurilmalarining mikrokontrolleriga quyidagi bloklar kiradi:
- mantiqiy signallar ko‘rinishida keltirilgan ma’lumotlar almashinuvini amalga oshiradigan kiritish-chiqarish parallel raqamli portlar;
- vaqtli integrallar shakllantirilishini amalga oshiradigan va mantiqiy hodisalarni hisoblashni bajaradigan taymer-hisoblagichlar;
- vaqt bo‘yicha bog‘liq bo‘lgan hodisalarni apparatli qayta ishlash uzellari;
- uzluksiz signallarni chiqarish va kiritishni amalga oshiradigan raqamli-analog va analog-raqamli o‘zgartirgichlar;
- taqsimlanadigan tizimlarda ma’lumotlar almashinuvini amalga oshiradigan kiritish-chiqarishning ketma-ket portlari;
- uziluvchi hodisalarga xizmat ko‘rsatish bloklari;
- ishlash ishonchliligini oshirish vositalari.
MK har bir periferiya uzeli maxsus funksiyalar registri deb ataladigan uzelning dasturiy qulay bo‘lgan konfiguratsion regisrida boshqariladigan kodlarni yozish yordamida rostlash imkoniyatiga ega bo‘ladi. Rostlash qurilmaning (masalan, taymer va parallel porti razryadlaridagi ma’lumotlarni uzatish yo‘nalishlarining razryadliligini va boshqalarni talab etadigan) ishlash rejimini tanlashni amalga oshirish imkonini beradi.
MKda joylashgan periferiya bloklarining tarkibi qurilmaning maqsadli vazifasiga bog‘liq bo‘ladi va ushbu turkumning mikrokontrollerida amalga oshiriladigan namunaviy vazifalari asosida ishlab chiqaruvchilari tomonidan aniqlanadi.
Mikrokontroller yadrosi
Mikrokontroller yadrosi tarkibiga protsessor, taktli generator va shina kontrolleri kiradi (6.4-rasm). Protsessor ikkilik kodi va komandalar ketma-ketligidan iborat bo‘lgan dasturga muvofiq ushbu jarayonni boshqarish ko‘rinishida keltirilgan axborotni qayta ishlash jarayonini bevosita amalga oshiradi. Taktli generator MK uzellarida jarayonlar o‘tishini sinxronizatsiyalovchi tayanch signallar ketma-ketligini tayanch impulslarning tashqi ketma-ketligi asosida shakllantirishni amalga oshiradi. Shinalar kontrolleri MKda komandlar bajarilishining turli bosqichlarini ichki shina bo‘yicha taktlovchi va MK periferiya qurilmalari bilan ma’lumotlar almashinuvini tashkil etish uchun zarur bo‘lgan ko‘p fazali impulsli ketma-ketlikning tuzilishini amalga oshiradi.
Komandalar berilgan adreslar (katakchalar raqami) bo‘yicha komandalar xotirasida joylashadi va o‘z ichiga bajariladigan operatsiyalarni tavsiflaydigan boshqariluvchi kodlarni va berilgan operandlar (amallar bajariladigan ma’lumotlar)ni oladi.
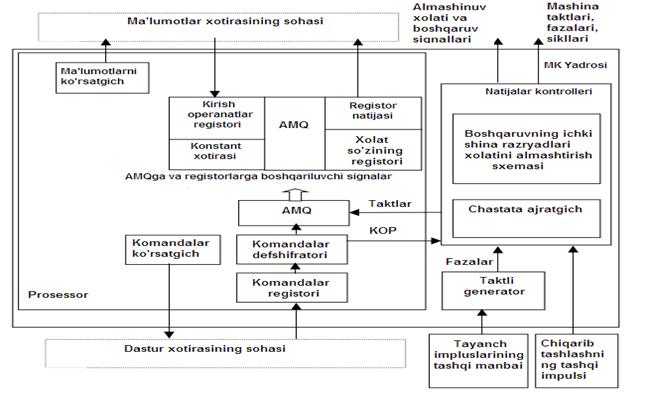
Har bir MK komandalar ro‘yxati va ularning formatlari xarakterlanadigan komandalarning muayyan tizimiga ega bo‘ladi. Komandalar ro‘yxati o‘z ichiga ushbu MK protsessorida bajarilishi nazarda tutilgan amallar to‘plamini oladi. Har qanday MK komandalar ro‘yxatida amallarning to‘rtta guruhiga ajratish mumkin:
- ma’lumotlar uzatish amallari (MK katakchalar, shuningdek MKning boshqa dasturiy qulay elementlar o‘rtasida);
- arifmetik amallar («VA», «YoKI», «YoKI»ni istisno qiladigan inversiya, turli siljishlar);
- boshqaruvni uzatish amallari (berilgan adres bo‘yicha shubhasiz o‘tish, operandlar tengsizligi yoki tanglik sharti bo‘yicha o‘tish, quyi dasturga o‘tish va undan qaytarish va h.).
Komandalar formati amallar dasturining navbatdagi qadamida bajariladigan tipni, kirish va chiqish operandlarini, shuningdek dasturning quyidagi qadamda bajarilishi kerak bo‘lgan komandalar adresini aniqlash imkonini beradi.
Bajariladigan komandalar tipi amallar kodi (KOP) beriladi.
Operandalarni berish uchun ularni lokalizatsiyalash metodlari (adreslash usullari) qo‘llaniladi:
- noaniq bo‘lgan: operand undan foydalana olishning bir xilligi bilan bog‘liqligi (masalan, uning joylashish imkoniyatiga bog‘liqligi) ko‘rsatilmaydi;
- bevosita: kirish operand komandalarda (masalan, konstant topshirig‘i maqsadida) joylashtiriladi;
- to‘g‘ri: kirish operand komandalarda (masalan, konstant topshirig‘i maqsadida) joylashtiriladi;
- to‘g‘ri: komandada operand joylashgan ma’lumotlar xotirasidagi adres ko‘rsatiladi;
- bevosita: komandada operand joylashgan ma’lumotlar xotirasidagi katakchalar adresini o‘z ichiga olgan ma’lumotlar xotirasidagi katakchalar adresi ko‘rsatiladi (masalan, dastur uchastkasining bir necha marta takroranganda ketma-ket joylashgan ma’lumotlardan foydalana olishni tashkil etishda izlanayotgan ma’lumotlar adresini o‘zgartirgan holda komandalar operandining qiymatini o‘zgartirish);
- nisbiy: komandada (masalan, noaniq beriladigan) ayrim kattalikka tuzilgan ma’lumotlar xotirasida katakchalar adresi ko‘rsatiladi, izlanayotgan operand joylashgan ma’lumotlar xotirasidagi katakchalar adresini beradi (masalan, ma’lumotlar jadvalining elementiga murojaat qilganda jadval boshiga nisbatan siljishi bo‘yicha izlanayotgan operandni aniqlash qulaydir).
Quyidagi bajariladigan komandalar adresi komandalarning ushbu vaqtida bajariladigan adresdan keyin keladigan dastur xotirasining adresi kabi noaniq beriladi, bu ko‘pgina dasturlarda komandalar ketma-ketligining liniyali uchastkalarga ega bo‘lish bilan tushuntiriladi. Sikllar, quyi dasturlar, shartlar bo‘yicha vetalenieni va h tashkil etishda uning aniq topshirig‘i uchun komandalar qo‘llaniladi, KOP boshqaruvni uzatishning muayyan amalini kodlaydi.
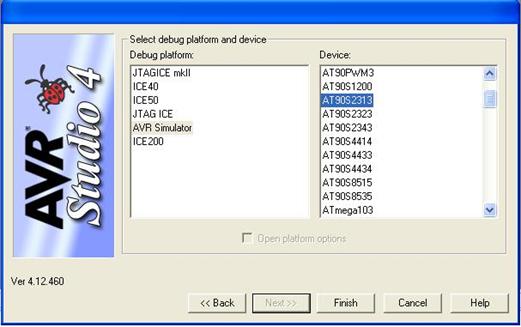
Dastur strukturasi.Ishning davomi dastur nomi bilan mos bo‘lgan oynada davom etadi. Oynaning asosiy modulida assembler dasturiga mos dastur matni kiritiladi:
Kommentariya – qator bo‘lib (yoki qator qismi), «nuqta vergul bilan boshlanadi - ; »
Derektivalar «tochka
- . » bilan boshlanadi
Shuni ta’kidlash lozimki,assembler qurilmalar aro ma’lumot almashish va shartli
,shartsiz o‘tish operatsiyalarini bajaradi.Shuning uchun dasturlash jarayonlarida
xar bir komandalarga izox beriladi.
Asosiy modulning oynasiga
quyidagi matnni kiritish kerak:
;mikrokontrollerAT90S2313 seriyasida foydalanish
;xosil qilish kuni – 23.02.2014, o‘zgartirilgan 28.03.2014
.include "2313def.inc" ; faylni biriktirish
.device AT90S2313 ;MS uchun komandani tanlash
;registrlar REG shartli nomini kiritish
.def data=r16
.def data1=r17
;
;o‘zgaruvchilar shartli nomini kiritish SRAM
.dseg
code: .byte 1 ;bir baytli o‘zgaruvchilar
keys: .byte 1 ;tugmacha xolati o‘zgaruvchilari
keys1: .byte 1 ; tugmacha xolati o‘zgaruvchilari
key_up: .byte 1; tugmacha oraliq xolati o‘zgaruvchilari
leds: .byte 1 ; svetodiodlar xolati o‘zgaruvchilari
;boshlanish flash


Dasturning chap tomonida biriktiriladigan fayllar berilgan.(include)
Oynaning o‘ng tomonida MK ichki qurilmalari keltirilgan bo‘lib simulyatsiya jarayonida ularning ish jarayonini kuzatish mumkin.
.device atiny2313
.include tn2313a def.inc
.creg
.org 0x00
rjmp main
main:
Ldi r16,0xff; 0b11111111
Out ddrb,r16
cycle;
rjmp cycle
Device- MK turi nomi
Include-bu yerda biriktiriladigan fayllar bor.Ular quyidagi joyda jolashtirilgan.
-AVR TOOLS
-ASSEMBLER
-APROTES
Equ – xar bir ma’lum nom bilan belgilanadi.Xar bir konfiguratsiya bitlari nom bilan nomlangan.
Def- asosan registrlarni omlash uchun foydalaniladi. R16 ni temp bilan blgilandi.
Creg- flesh xotirani belgilovchi komanda
Org- qaysi adresdan joylashishini ko‘rsatadi.
Rjmp main - vektor adreslar uchun ishlatiladi.Ushbu turdagi MK lar uchun vektor adreslar mavjud bo‘lib,ular nolinchi adresdan boshlanib nechanchidir adresgacha joylashadi.
Vektor adreslar –asosan qo‘ng‘iroq vazifasini bajaruvchi INT (prerыvanie).MK xar xil qurilmalar bilan ma’lumot almashadi. Masalan registrlar bloki,taymer v.b.
U ma’lumot almashishi to‘g‘risidagi natijani markaziy protsesorga yetkazib turishi kerak.Ma’lumotlani dastur orqali beradi,shunda vektor adreslar orqali murojaat etadi.
Bizning xolatda main- ya’ni nolinchi adresga sakrash.
MISOL
Masala sharti: 5 sonidan 3 sonini ayirish algoritmi tuzilsin. Agar tumbler yoqilgan bo‘lsa RA2 kirishiga,ndikatsiyaga ayirmani chop eting Agar tumbler o‘irilgan bo‘lsa – indikatsiyaga nol raqamini chop eting.
Ish jarayonida kiritish/chiqarish portlarini inobatga olish kerak, ma’lumotlarni uzatish aloxida chiqish registrlari orqali beriladi DDR (DDRA, DDRB, DDRC, DDRD). Agar chiqish porti chiqish konfiguratsiyalangan bo‘lsa, qayta yoqish registr PORT (PORTA, PORTB, PORTC, PORTD), agar chiqish kirish uchun moslashtirilgan bo‘lsa, u xolda PIN (PINA, PINB, PINC, PIND).

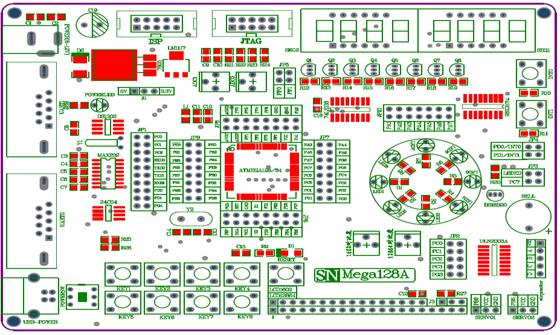
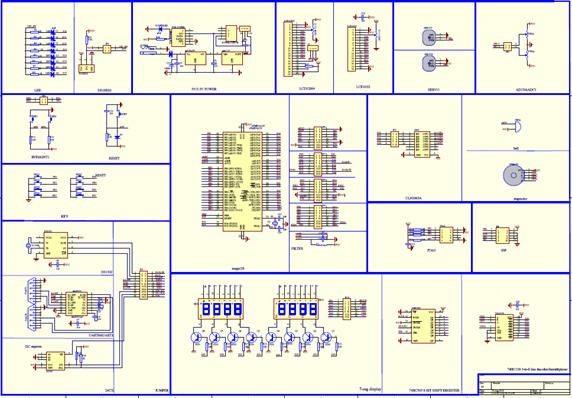
Murakkab prossesorlarga dastur yozish
Oldin oddiy programmator bilan tanishib chiqamiz! Bu programmato universal
programmatorlardan hisoblanadi.
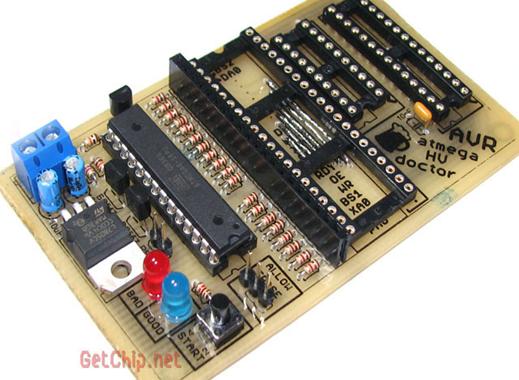
Bugungi darsimiz Sarasof kompaniyasi tomonidan ishlab chiqilgan programmator va dastur bilan tanishamiz va uni ishchi holatga keltirib ishlatib ko’ramiz.
Quyidagi rasmda uni tashqi ko’rinishi bilan tanishamiz
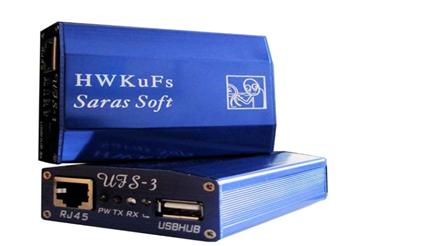
BU programmatorni ichki ko’rinishi quyidagi rasmda keltirilgan
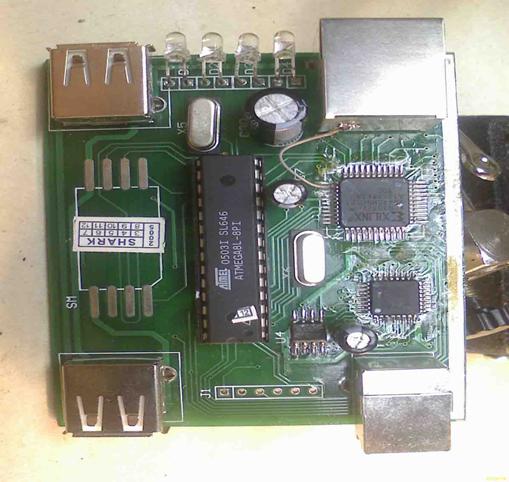


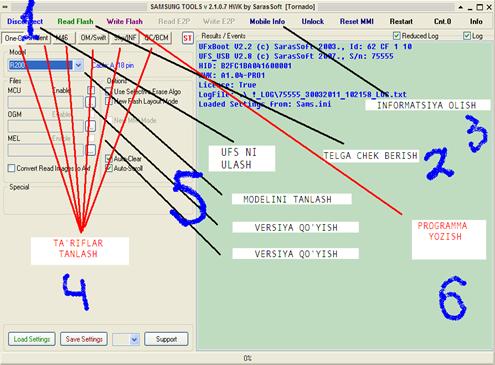
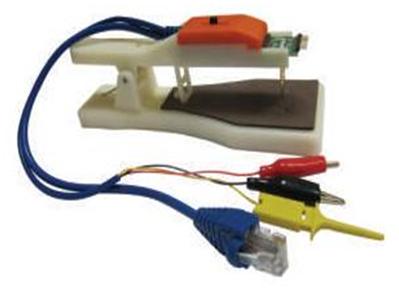

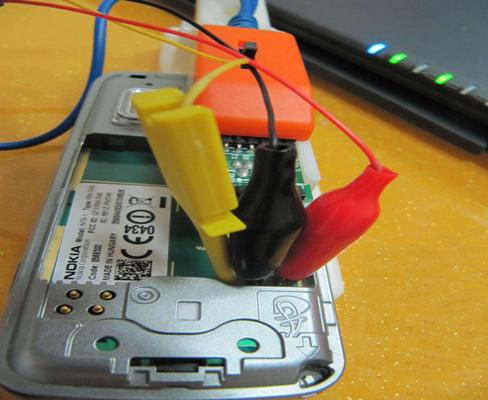

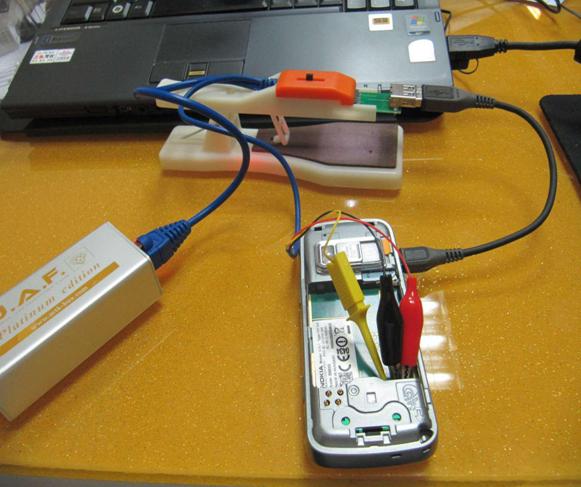


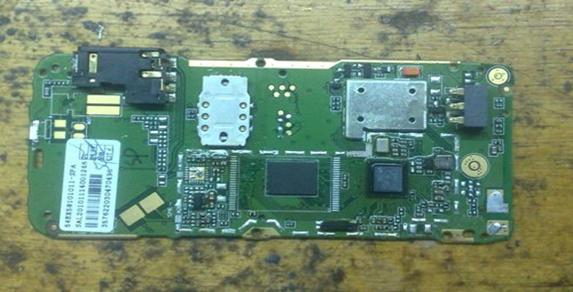


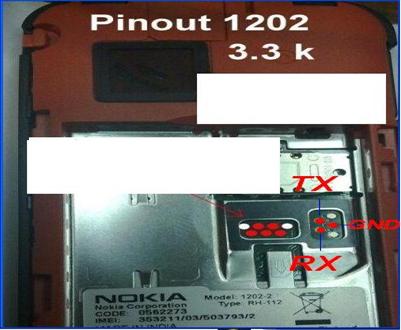

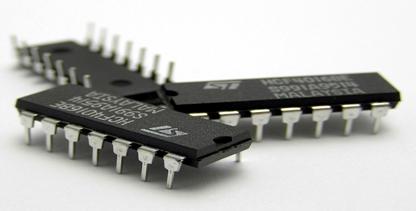

Nazorat savollari.
1. Tayanch generatorining vazifasi nimadan iborat.
2. MK PIC16F84A rusumli mikrokontrollerning «oyoqchalari» belgilanishini tafsiflab bering.
3. Interfeysdan nima maqsadda foydalaniladi.
Mavzu: Murakkab o’rnatilgan tizimlar dasturiy taminoti.
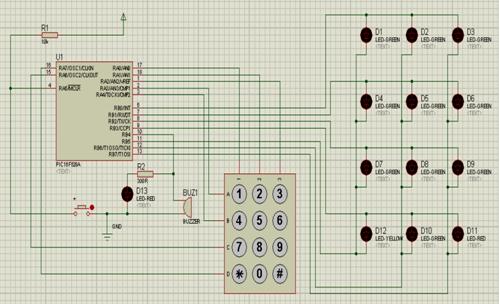
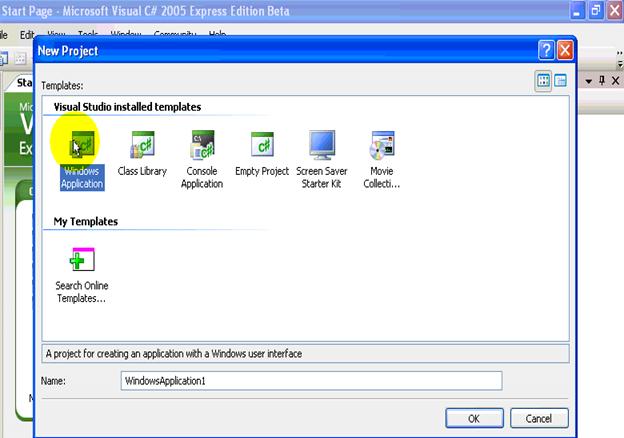




12-13 ma’ruza
Mavzu:
Ma’lumotlarni saqlash — kopbterning asosiy funksiyalaridan biri xisoblanadi. Asosiy vositalaridan biri ma’lumotlar bazasi xisoblanadi.
Ma’lumotlar bazasi strukturasi
Ko‘pchilik ma’lumotlar bazasi jadval strukturasiga ega.
Ma’lumotlar bazasida ustunlar maydon,qatorlar yozuv xisoblanadi.Maydon ma’lumotlar bazasi strukturasini, yozuvlar esa ma’lumotlarni tashkil qiladi.
Oddiy ma’lumotlar bazasini tashkil qilish uchun albatta maxsus dasturiy ta’minotlarga murojaat etmasdan xam tashkil qilsa bo‘ladi.
Ma’lumotlar bazasini boshqarish tizimi (SUBD) — dasturiy vosita bo‘lib,uning yordamida ma’lumotlar bazasi xosil qilish va undan foydalanish mumkin.Dunyo miqyosida bir qancha ma’lumotlar bazasi xosil qilish dasturiy ta’minotlari mavjud bo‘lib, ulardan Clipper, Paradox, FoxPro v.b.
Access dasturiy ta’minoti foydalanuvchi uchun qulay . Access 6 ta bo‘lim oynalaridan iborat bo‘lgan dasturlar bilan ishlay oladi.
Tablitsa — ma’lumot bazasining asosiy ob’ekti.
So‘rovlar —maxsus strukturasi bo‘lib,bazani qayta ishlashda foydalaniladi.
Forma — uning yordamida yangi ma’lumotlar kiritiladi.
Otchetlar —uning yordamida printerga ma’lumotlar uzatiladi.
Makros —bu makrokomandalar. Agar bazaning qaysidir qismi ko‘p foydalanilsa, bir qancha komandalarni bir makrosga gruppalanadi va ma’lum tugmachalarga biriktiriladi.
Modullar — Visual Basic tilidagi dasturiy protseduralar.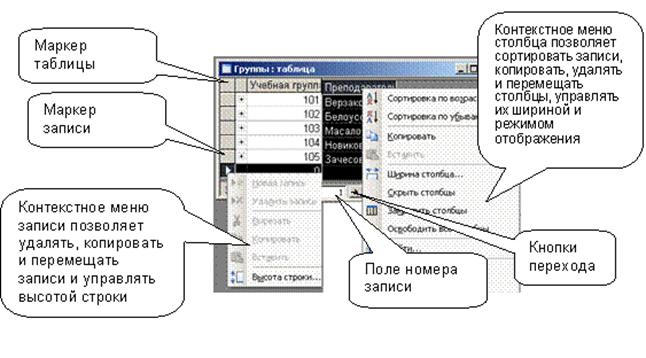 Ma’lumotlarni qayta ishlash rejimi – vazifalarni bajarish usuli tizimlar
o‘rtasidagi vazifalar resurslar ketma ket taqsimlanishi. Ko‘rilayotgan rejim operatsion
tizimni dasturlar ma’lumotlar almashinuvini ta’minlaydi
Ma’lumotlarni qayta ishlash rejimi – vazifalarni bajarish usuli tizimlar
o‘rtasidagi vazifalar resurslar ketma ket taqsimlanishi. Ko‘rilayotgan rejim operatsion
tizimni dasturlar ma’lumotlar almashinuvini ta’minlaydi
Ya’ni operativ va tashqi xotiraning kirtish va chiqarish qurilmalarini belgilaydi, prsessor vaqtlari va boshqa resurslar foydalanuvi nomi ketma-ketligi atributlar orqali xam amalga oshiriladi.
Vazifalararo resurslarning taqsimlanishi tizimga ma’lumotlarni kelishi, tizim o‘tkazuvchanligi, vazifaning narxi v.b. bog‘liq.
Ma’lumotlarni qayta ishlash xarakteristikalari:
Multiprogrammali qayta ishlash. Unda protsessor qayta ishlash etaplari ketma ketligi, ma’lumotlarni kiritish va chiqarish , tashqi qurilmalarga murojaat v.b. Tizimda bir vaqtning o‘zida bir qancha vazifalarning bajarilishi multiprogrammali qayta ishlash yoki multidasturlash deyiladi. Uning asosiy vazifasi –tizimning ishchanligini oshirishdir.
Ma’lumotlarni operativ qayta ishlash- foydalanuvchilar tizimlari orasidagi kiritish va chiqarish xisoblash jarayonlari
Ma’lumotlarni paket ko‘rinishida qayta ishlash quyidagicha-bir foydalanuvchiga tizimdan kelayotgan katta xajmdagi ma’lumotlarni kiritish va chiarishni xarakterlaydi.Undan tashqari qisqa vaqt orlig‘ida ma’lumotlarni qayta ishlab javob qaytarish.
13-leksiya
Bufer i boshqaruv taymerlari
AVR seriali mikrokontrollerlar bir qancha o‘rnatilgan taymerlarga ega.birinchi kategoriyaga umumiy foydalanuvchi taymerlar, 2-chi kategoriyaga qo‘riqchi taymerlar.Qo‘riqchi taymer mikrokontroller “zavisaniya”davrida qayta yuklanishda foydalaniladi.Umumiy foydalaniladigan taymerlar turli vaqt intervallari xosi qilish v.b.Undan tashqari xisoblagich rejimida va belgilangan chastotadagi takt impulslarini xisobi, shunga nisbatan tashqi signallar vaqtini o‘lchash v.b. foydalaniladi. AVR seriali mikrokontrollerlarda 8va 16 razryadli taymer xisoblagichlar deyiladi.
Xar bir 8 razryadli taymer bir 8razryadli registrdan tashkil topgan bo‘lib,registr o‘z navbatida MK ning k.ch registri xisoblanadi.Bu registr taymerning joriy xolatini saqlaydi , shuning uchun xisob registri deyiladi.Xar bir registr o‘z nomiga ega.8-razryaddli xisob registri TCNTx, x-taymer nomeri.T0 uchun TCNT0 v.x.
Taymer rejmi
Ular bir qancha rejimlarda ishlashi mumkin.Rejimni tanlash uchun maxsus registrlar ya’ni taymerni boshqarish registrlari ishga tushadi.Taymerni boshqarish registri TCCRx.
Rejim normal
Bu eng sodda rejim.Ushbu rejimda kirish impulslarini xisoblaydi va to‘lib ketganda uzilishlarni tashkil qiladi.
Taymer xisoblagich taqsimlagichi(Preddeliteli taymerov schetchikov)
Yuqorida aytilganidek MK xar bir taymeri turli manba’dagi takt impulslari bilan ishlaydi.Bular tashqi impulslar yoki MK ichki sxemasidan ishlab chiqilgan impulslar.Qanday signal bo‘lishidan qat’iy nazar taymer kirishiga tushishi uchun taqsimlagich sxemasiga keladi.o‘z navbatida taqsimlagichning vazifasi paydo bo‘layotgan chastotalarning diapazonini kengaytirsh va taymer vaqti.
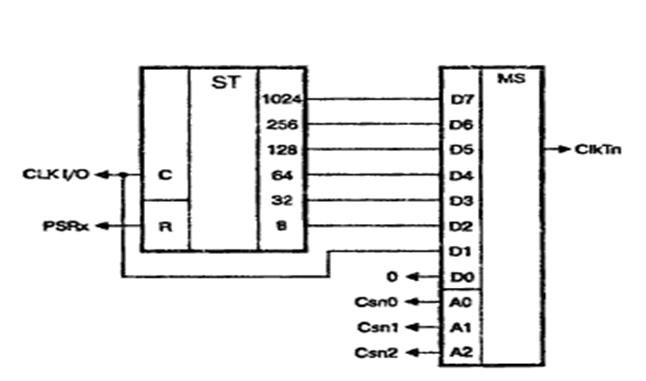
Chizmadan ko‘rinib turibdiki CLK ichki taktli genratorning chastotasi maxsus o‘n razryadli taqsimlovchiga kelib tushadi. Bu taqsimlovchi chiqishda quyidagi signallar taqsimlovchi tarkibida qoladi, CLK /8, CLK /32, CLK /64, CLK /128, CLK /256, va CLK /1024, Bu signallar multipleksor kirishida qabul qilinadi.Multipleksorning adresli kirishida uch razryadlarnig vaqt boshqaruvi(TCCRn) taymeriga keladi.
Bu xolda esa, razryadlarga yozilgan CSn0, CSn1, CSn2 turli-xil ko‘rsatgichlarni mavjud bo‘lgan sakkizta “taqsimlovchi rejimlar xolati” dan birini olishimiz mumkin. Tanlangan rejim chiqishda o‘n razryadli taqsimlagichning chiqishiga kelib tushishi mumkin, taktli generatorning to‘g‘ri signali yoki boshlang‘ich mantiqiy pog‘ona ( kirish D0). Oxirgi xolatda signal taymer chiqishida mavjud bo‘lmasligi mumkin, uning ishi to‘xtatiladi.
UART/USART ketma ket kanallari
Mikrokontroller ba’zida o‘zida:
- UART o‘rnatilgan universial ketma ket asinxron qabul qilib uzatgich
- USART universial ketma ket sinxron\asinxron qabul qilib uzatgich
Ushbu kanallar MK bilan ixtiyoriy tashqi qurilmalararo ma’lumot almashish uchun mo‘ljallangan.Protokol UART/USART asosan kompyuterning ketma ket portidan foydalaniladi(SOM port)
Ko‘p xollarda dasturlash jarayonlarida vaqtni ushlab turish uchun bo‘sh operatordan yoki ichma ich sikllardan foydalaniladi.U esa o‘z navbatida MK ni faqat kutish rejimini ishlash uchun kutishga majbur qiladi va boshqa opersiyalar bajarilmaydi.Shuning uchun vaqt intervallarini ishlab chiqishda o‘rnatilgan taymer xisoblagichdan foydalaniladi.Ular uzilishlarni tashkil qilishda yoki aksi xollarda xam ishlay oladi.
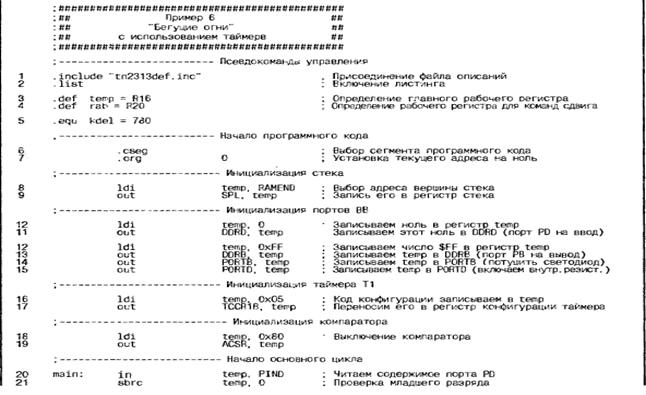
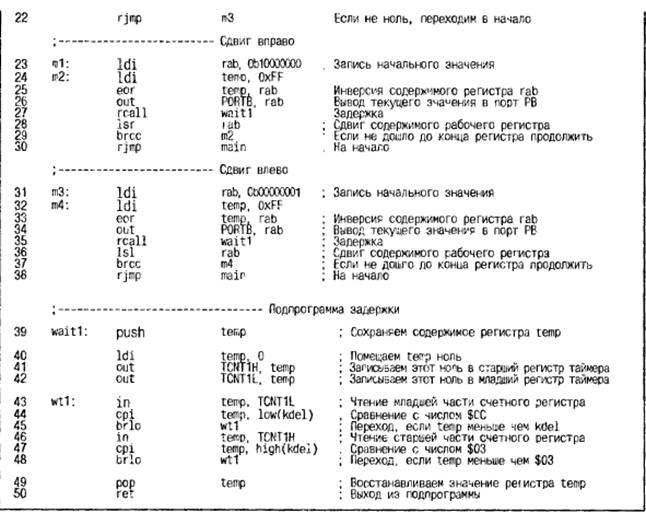
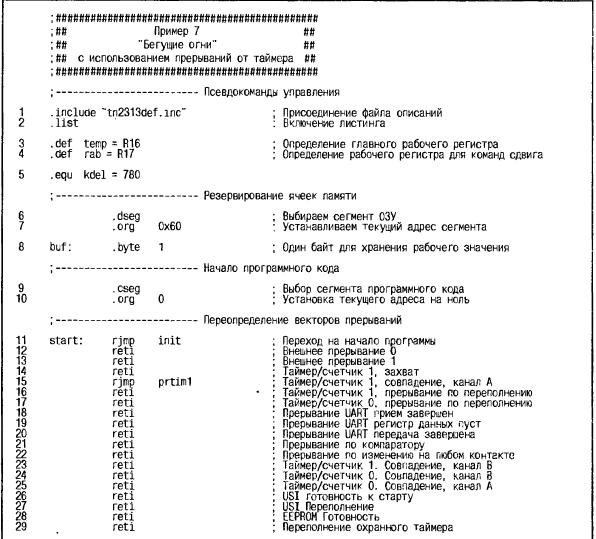
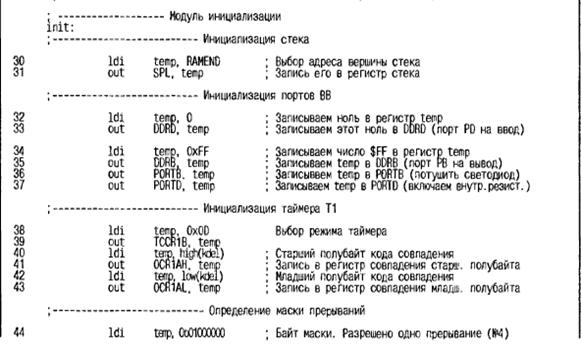
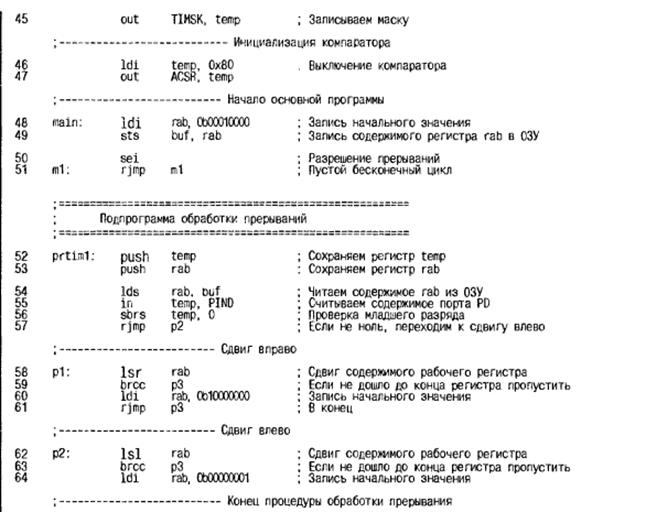
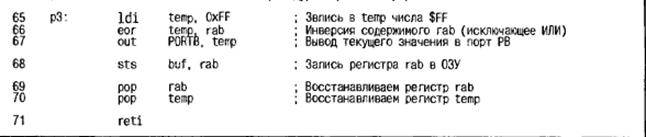
• Misol OVOZ signallari
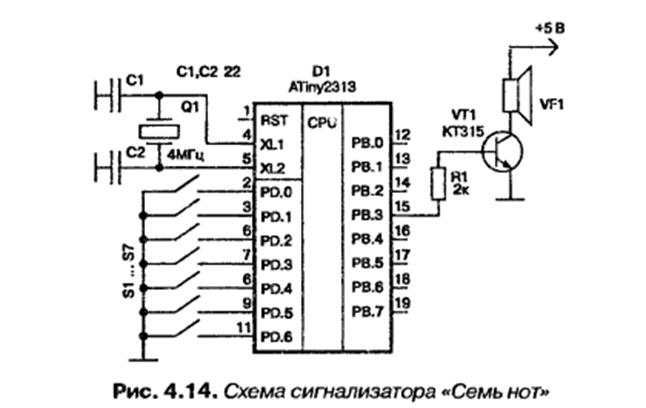
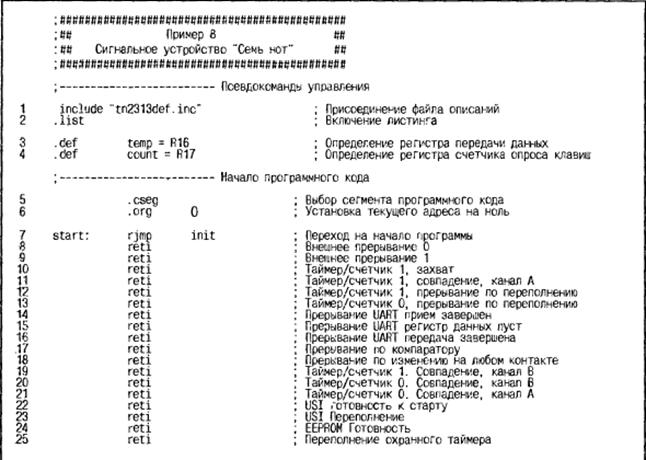

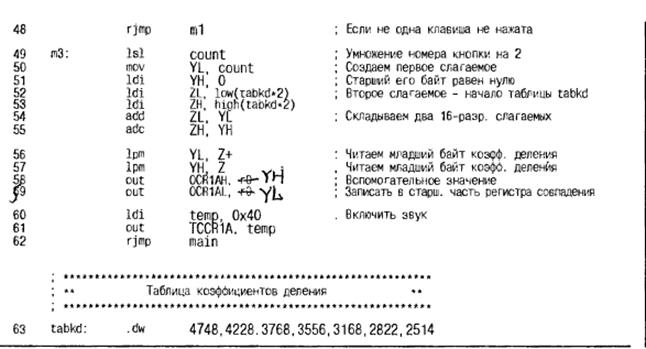
Mavzu: Murakkab o’rnatilgan tizimlardagi dastur protokollariga misollar.
Reja:
1.SSH, Telnet, rlogin protokollari orqali serverlarni
boshqaruvchi utilita –PuTTY
2.TeamViewer - masofadan turib kompyuterni boshqarish
maqsadida ishlatiladigan dastur .
 Putty - masofaviy
kompyuter(server)larni
Putty - masofaviy
kompyuter(server)larni
SSH,Telnet, rlogin protokollari orqali boshqarishni
amalga oshirib beruvchi, uy sharoitida foydalanish
tekin bo‘lgan klient dastur hisoblanadi. "C"
dasturlash tilida yozilgan bo‘lib, masofada turgan
kompyuter(server)niterminal orqali to‘liq boshqarishni
amalga oshirib beradi, qisqa qilib aytganda tarmoq va
tizim administratorlarining eng sevimli dasturi. Dasturni o‘z saytidan yuklab olishingiz mumkin. Ko‘pchilik bu klient orqali, windows operatsion tizimidan turib, "SSH" protokoli orqali masofada turgan "Linux" serveriga ulanib, uni sozlashni amalga oshirish uchun ishlatiladi. Juda kichik va juda sodda dastur hisoblanadi. Bir paytning o‘zida bir necha server bilan ulanib, ishlash mumkin.
Keling endi biror serverga ulanib ko‘ramiz, dasturni ishga tushirib, kerakli joylarga quyidagilarni kiritamiz.
Host Name(or IP address): Server nomi yoki uning IP adresi - 192.168.172.1(misol uchun).
Port: ulanadigan port raqami - 22(SSH protokoli uchun).
Connection type: SSH(protokol nomi).
OPEN
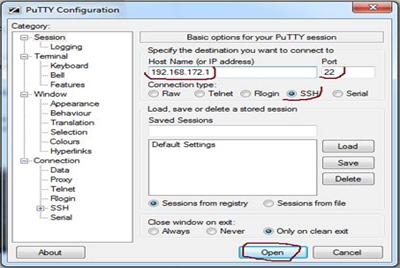
Shundan so‘ng, server foydalanuvchisi nomi va paroli kiritiladi va siz uchun serverdagi terminal(serverda ishlash uchun) ochib beriladi.
Agar serverlariz ko‘p bo‘lsa, har safar qaytadan ularning IP adresini kiritish siz uchun og‘ir bo‘lsa, bir marotaba kiritib, shu sessiyani saqlab qo‘ying, ya'ni
Saved Sessions: sessiya nomi(istalgan nom) va Save tugmasi.
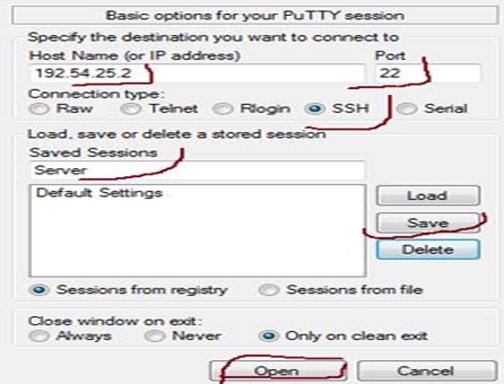
Utilitni sozlash, uni ishga tushirganingizdan so‘ng paydo bo‘ladigan oynaning, chap tomonidan amalga oshiriladi. Misol uchun kodirovkani almashtirmoqchi bo‘lsangiz, chap tomondan
Window -> Translation -> Received data....
kirish kifoya.
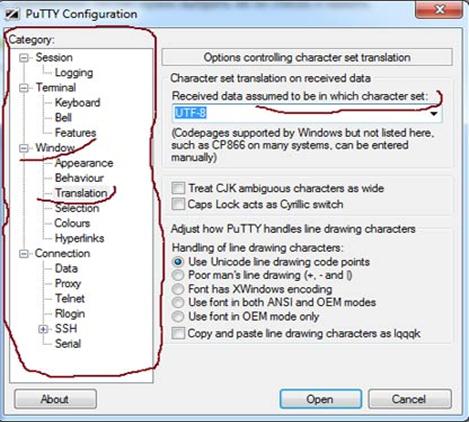
Putty o‘zida quyidagi utilitlarni mujassamlashtirishi mumkin:
- Putty: Telnet va SSH klient;
- PSCP: SCP klient - terminal orqali shifrlangan protokol orqali fayllarni ko‘chirish;
 - PSFTP: SFTP klient - FTP
orqali fayllar almashinuvi;
- PSFTP: SFTP klient - FTP
orqali fayllar almashinuvi;
- PuttyTel: alohida telnet klient;
- Plink: Putty terminali uchun interfeys;
- Puttygen: RSA va DSA kalitlar hosil qilish;
- Pterm: Unix tizimi uchun terminal emulyatori.
Siz bu utilitlarni to‘liq yoki alohida o‘rnatishingiz mumkin.
TeamViewer - masofadan turib kompyuterni boshqarish maqsadida ishlatiladigan dastur
TeamViewer - masofadan turib kompyuterni
boshqarish maqsadida ishlatiladigan dastur. Uyda ishlatish uchun tekin hisoblanadi.
Vazifasi, masofada turgan kompyuterni boshqarish, fayllar almashinish, video
konferensiyalar o'tkazish hususiyatiga ega.
Bu dastur Windows, MacOs, Linux va Android tizimlarida ishlaydi.
Ishlashi:
Ikkita kompyuter internetga ulangan bo'lishi lozim va ularga shu dastur
o'rnatiladi.
Dastur ishga tushirilganda, ikkala kompyuterda avtomat ID va parol generatsiya
qilinadi, shu ID orqali bir kompyuterdan turib ikkinchisiga kirish mumkin.
TeamViewer orqali Flesh texnologiyasi asosida kompyuterni brouzer yordamida ham
boshqarish mumkin
TeamViewer –dasturini ko’rinishi
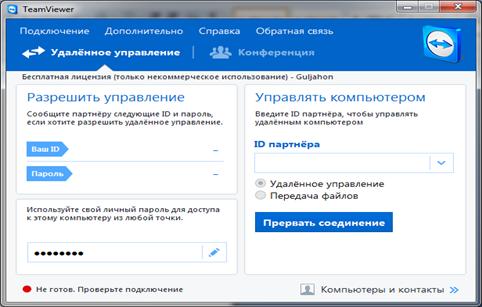

Mavzu:Dasturiy ta’minotni boshqarish.
Reja:
1. Ma’lumotlar xotirasi.
2. Mikrokontroller registrlari.
3. PICkit2 programmatori.
-EEPROM (Electrically Erasable Programmable ROM)-elektr o‘chirishga mo‘ljallangan,foydalanuvchi tomonidan dasturlanadigan DXQ(PZU).
Ushbu turdagi PZU EPROMning yangi avlod xisoblanib tunel mexanizmlari asosida el. o‘chirish ishlatiladi. EEPROMdan foydalanish dastur yozib ,o‘chirishga imkon yaratadi. Ular o‘z navbatida qurilmalarning nosozligini tekshirish,tizimlarning ish xolatini tekshirish uchun yordam beradi. Keyinchalik Flash-ROM paydo bo‘lib ularning farqi
- EEPROMda xar bir yacheykasi aloxida o‘chiriladi,
-Flash-ROMda esa umumiy bloklari bilan o‘chiriladi.Agar Flash-ROMda bitta yacheyka tarkibini o‘zgartirish kerak bo‘lsa,barcha bloklarini qayta dasturlashga to‘g‘ri keladi.
Ma’lumotlar xotirasi
Statik OZU(OZU tarkibi MK takt chasotasi(1 V ) kamayishida saqlanadi) asosida ma’lumotlarni saqlaydi.Ko‘pchilik MK lar “ma’lumotlarni saqlash kuchi”parametrlari bilan xarakterlanadi (USTANDBY).
MK registrlari
MK registrlar to‘plamiga ega bo‘lib,uning resurslarini boshqarishda foydalaniladi.Registrlar tarkibiga:
- protsessor registri(akkumulator, xolatlar registri, indeks registrlar) , boshqarish registrlari(uzilishlarni,taymerni boshqarish),ma’lumotlarni kiri-tish-chiqarishni ta’minlash registrlari(analog,parallel,ketma-ket port ma’lumot registrlari).Ushbu keltirilgan registrlarga murojaat turli ko‘rinishda bo‘ladi.Adreslarni ko‘rsatib murojaat,adreslar maydoniga murojaat v.b.
8-bitli mikrokontrollerlar
8-bitli mikrokontrollerlar Garvard arxitekturali bo‘lib 2 katta oilaga mansub: PIC10/12/16 va PIC18.
8-bitli MK lar PIC10/12/16 -2-ta bazali arxitekturali yadroga ega: BASELINE va MID-RANGE
BASELINE- PIC10 va PIC12 va PIC16 oilasiga mansub
Korpusda 6 dan 28gacha chiqishlar bo‘lgan 12-razryadli arxitekturaga ega.(Microchip)
-kichik korpus va kam chiqishli
- Flash xotira
-kam xarajat
- 35 ta komandalar ketma-ketligi
MID-RANGE
PIC12 va PIC16 MK seriyasiga mansub.8 da 64 ta chiqishli. Flash xotira va 2.0 dan 5.5V.
- 6 — 64 chiqishli korpuslar:
-Flash xotira dasturi:
35 ta komandalar tizimi
PROGRAMMER (PROGRAMMATOR)
Read Device (mikrosxemani o‘qish) – mikroprogramma xotirasi, EEPROM xotirasi ma’lumotlari,konfiguratsiya bitlarini xisoblaydi.
Write Device (mikrosxemaga yozish) – Mikroprogramma xotirasiga dastur yozish.
Verify (tekshirish) – mikroprogramma xotirasi, EEPROM xotirasi ma’lumotlarini dasturlash oynasida mikrosxemadan o‘qilgan ma’lumotlarni solishtiradi.
Erase (o‘chirish) – Dasturlanayotgan MS ni to‘liq o‘chiradi. OSCCAL qiymati(ichki RC-generator kalibrovkasi) va band gap (taqiqlangan zona uzunligi) o‘zgarmaydi (faqat PIC12F629/675 va PIC16F630/676).
Blank Check (o‘chirishni tekshirish) –Mikroprogramma xotirasini o‘chirishni tekshiradi.
Verify on Write (yozishdan keyingi tekshirish) – mikroprogramma xotirasi va EEPROM ma’lumotlarini tekshiradi.
Full Erase (OSCCAL and BG erased) (To‘liq o‘chirish OSCCAL va BG ni xisobga olgan xolda)
TOOLS (INSTRUMENTLAR)
Enable Code Protect (kodni ximoyalashga ruxsat)
Enable Code Protect (kodni ximoyalashga ruxsat) – mikroprogrammaningFlash xotirasi kodini ximoyalashga ruxsat .
Enable Data Protect (kodni ximoyalashga ruxsat) – EEPROM-xotira ma’lumotlari kodini ximoyalashga ruxsat.
Auto-Detect (Avto-obnarujenie): Razreshaet USB-programmatoru avtomaticheski podavat napryajenie pitaniya na programmiruemыy mikrokontroller i avtomaticheski snimat
yego (nachinayuщim ne rekomenduetsya ispolzovat etot rejim).
Forced PICkit2 (Prinuditelno PICkit2 ): Rejim ispolzovaniya programmatora dlya podachi zadannogo napryajeniya pitaniya na programmiruemыy mikrokontroller. Posle vыbora
etogo rejima zagoraetsya svetodiod “Target”, i flajok VDD PICkit2 na ekrane ustanavlivaetsya v polojenie On (vыbrano). Polzovatel mojet izmenyat napryajenie pitaniya v okoshke vыbora s pravoy storonы okna programmы (nachinayuщim ne rekomenduetsya ispolzovat etot rejim).
Editing memory value (Redaktirovanie yacheek pamyati)
PICkit2™ da dasturlash aloxida mikroprogramma Flash-xotira va EEPROM yacheykalarini dasturlashga mo‘ljallangan.Foydalanuvchi adreslarini o‘zgartirib boshqa qiymat berishi mumkin.Undan tashqari ixtiyoriy xotiraga murojaatni tanlash imkoniyati xam mavjud.
(a)Access only EEPROM data memory (faqat EEPROM ma’lumot xotirasiga murojaat)
Enabled belgin (Razreshit)olib tashlang.Program Memory (Pamyat mikroprogramm).
Shundan so‘ng EEPROM Data ma’lumot paydo bo‘ladi: Write and Read EEPROM data on ly (faqat EEPROM-ma’lumot uchun o‘qish va yozish)qizil rangda, bu operatsiya bajarilishi mumkinligini bildiradi:
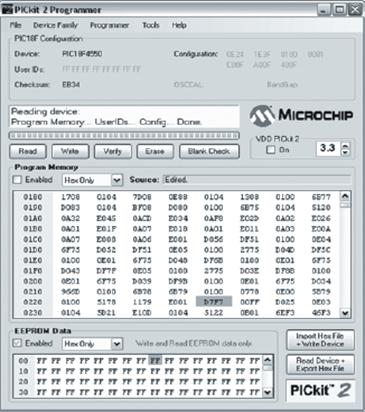
PICkit2 programmatori asosiy 7 tugmachalariga ega:
1. Read (o‘qish): dasturlanayotgan mikrosxemadan ma’lumotlarni o‘qish.
2. Write (yozish): mikrosxemaga dastur kodini yozish yoki yozish.
3. Verify (tekshirish): dasturlashni tekshirish.
4. Erase (Stiranie): dasturlanayotgan MS dagi ma’lumotlarni o‘chirish.
5. Blank Check (o‘chirishni tenkshirish): dasturlanayotgan MS tozaligini tekshirish.
6. Import hex File + Write Device (Import hex –fayl va MS ni dasturlash ): hex –faylni ochish va avtomatik ravishda dasturlanayotgan MS ga yozish.
7. Read Device + Export hex File (MS ni o‘qish va Eksport hex -fayl): MS dan o‘qish va avtomatik ravishda hex –faylga yozish.

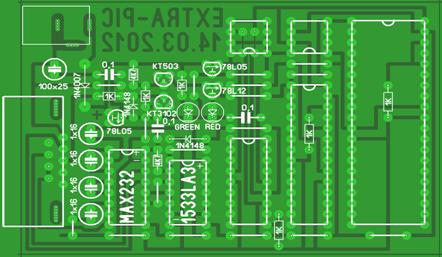
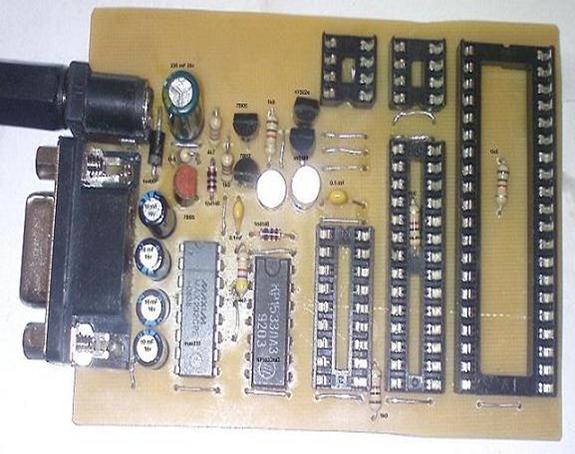
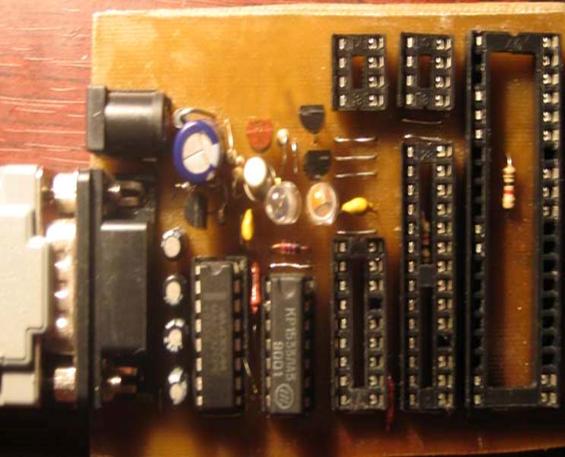
Nazorat savollari.
1. EEPROM nima?
2. PICkit2 programmatori asosiy tugmachalariga ta’rif bering.
3.8-bitli mikrokontrollerlar qanday arxetektura asosida qurilgan?
Mavzu:Murakkab o‘rnatilgan tizimlarni ishlab chiqish jarayoni
Kernel platformasi asosidagi tizimlar va Linux
tizimidagi ilovalar.
Reja:
1. Dasturlashda ishlatiladigan buyruqlar.
2. Dasturni yuklash.
3. Kernel platformasi asosidagi tizimlar.
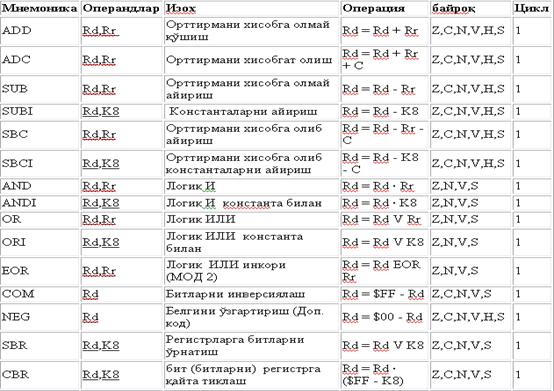 1.Buyruqlar ketma ketligi
1.Buyruqlar ketma ketligi
Ish jarayoni
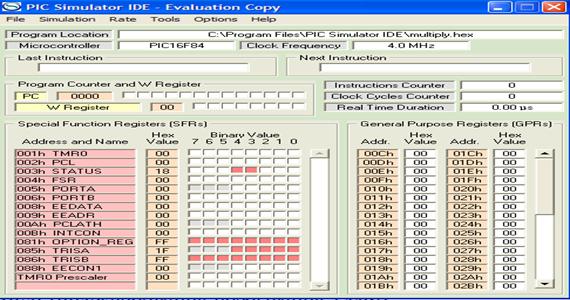
2-qadam OptionsSelect Mikrokontrollerni bosish.
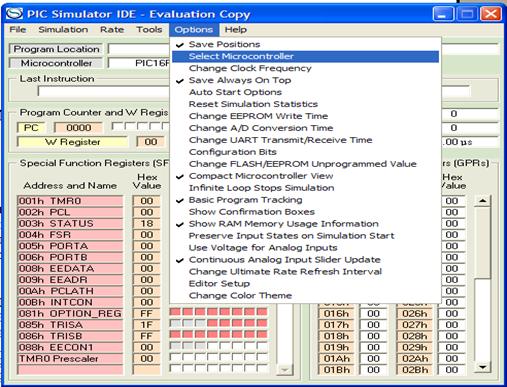
3- qadam. FileLoad Program ni bosish.
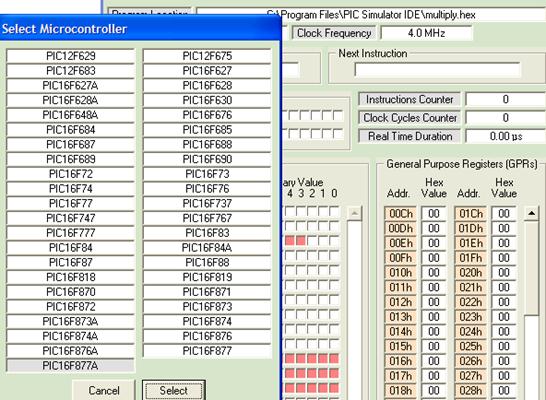
4- qadam. FileLoad Program ni bosish.
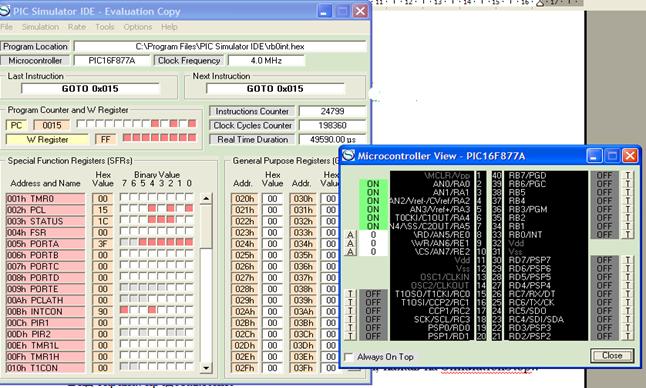
"Beguщiy ogon"
m1 movlw b00000011 ; akkumulatorga yozish
movwf PORTB; akkumulatordan portga jo‘natish
call Pause; metkaga o‘tish (qaytish bilan)
movlw b00001100; akkumulatorga yozish
movwf PORTB; akkumulatordan portga jo‘natish
call Pause; metkaga o‘tish (qaytish bilan)
movlw b00110000 ; akkumulatorga yozish
movwf PORTB; akkumulatordan portga jo‘natish
call Pause ;
movlw b11000000 ; akkumulatorga yozish
movwf PORTB; akkumulatordan portga jo‘natish
call Pause ; metkaga o‘tish (qaytish bilan)
goto m ; metkaga o‘tish (siklga tushish)
MISOL
Foydalanuvchi bo‘limdan 7segment.bas fayli tanlab olinadi.
Ushbu dastur 0
adn 99 gacha bo‘lgan sonlarni ikkita 7-segmentli displeyda parallel ulangan va
ikki boshqaruv liniyalaridan foydadalanilgan multipleks rejimidagi uzilishlarni
tashkil qiluvchi TMR0 rejimida ishlaydi. 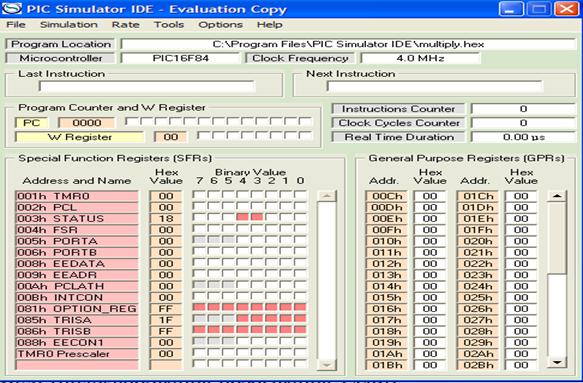
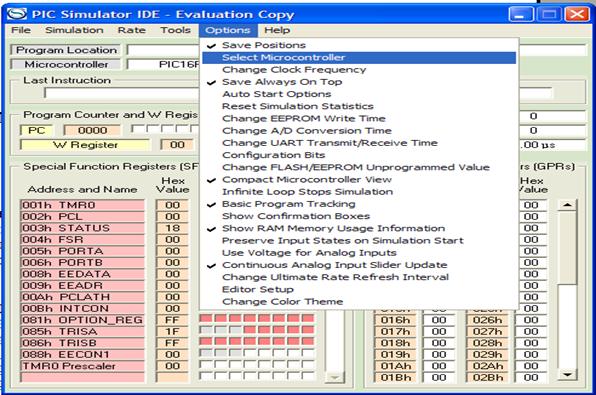

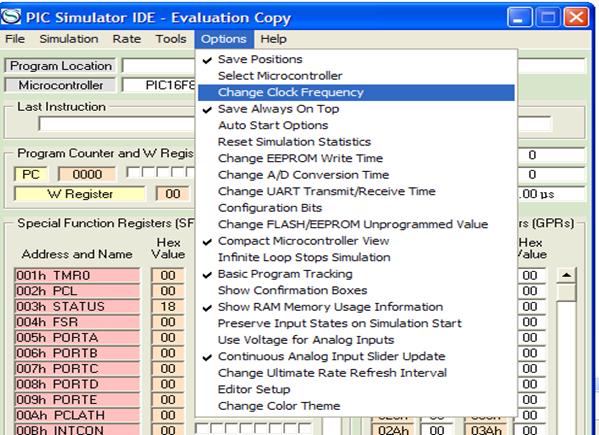
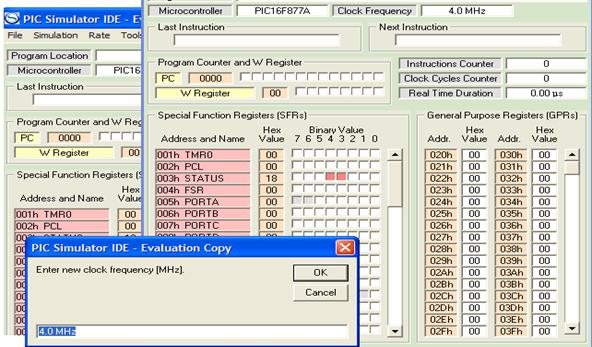
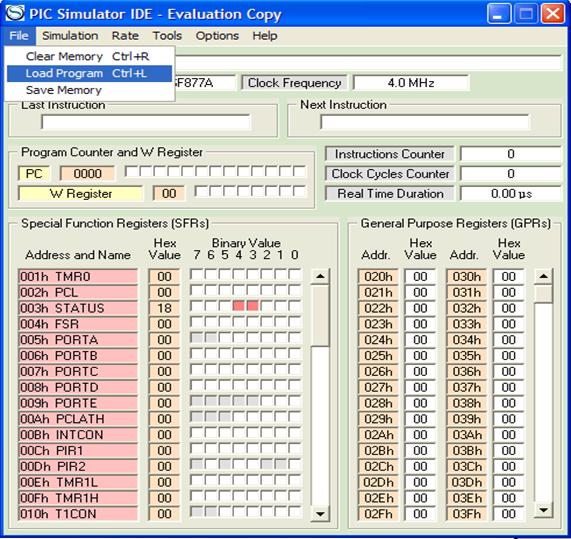
Dasturni yuklash

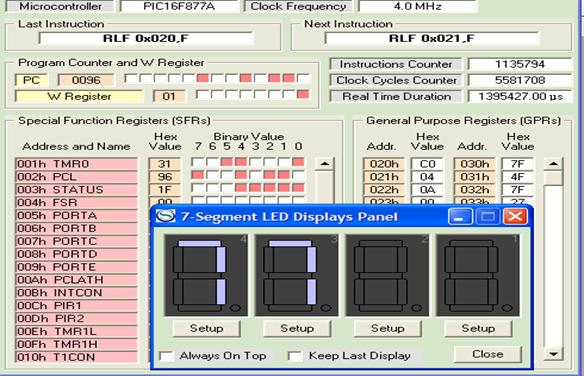
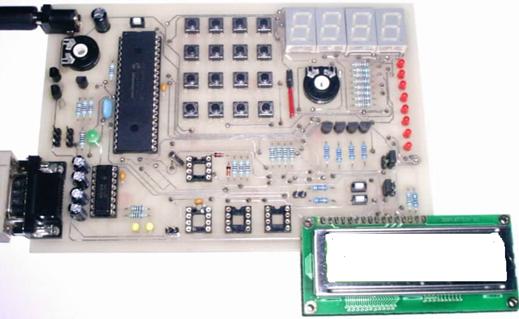
Misollar
Foydalanuvchi bo‘limdan 7segment.bas fayli tanlab olinadi.
Ushbu dastur 0 adn 99 gacha bo‘lgan sonlarni ikkita 7-segmentli displeyda parallel ulangan va ikki boshqaruv liniyalaridan foydadalanilgan multipleks rejimidagi uzilishlarni tashkil qiluvchi TMR0 rejimida ishlaydi.
Ishlash tartibi:
1) Dasturni ishga tushirish.
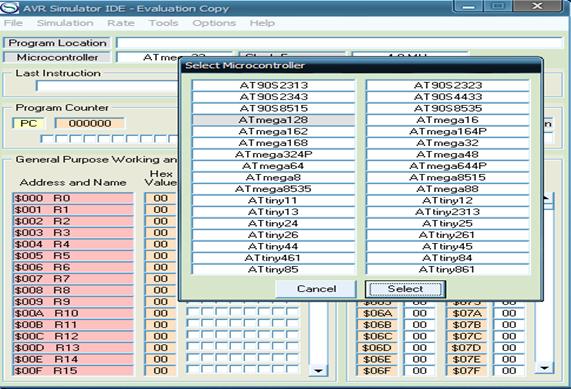
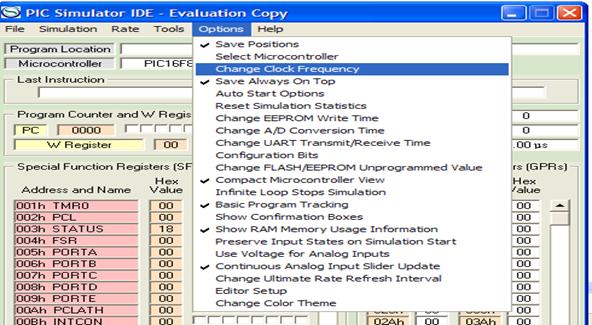
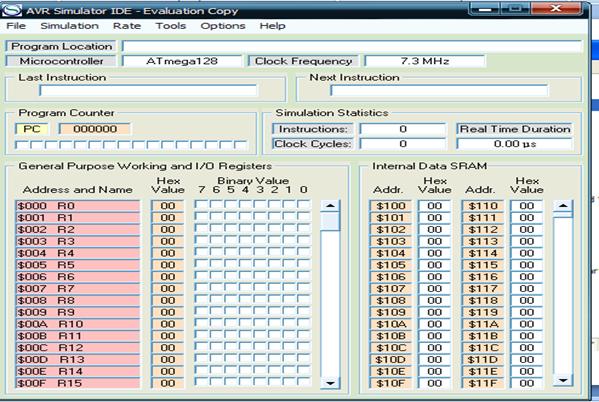
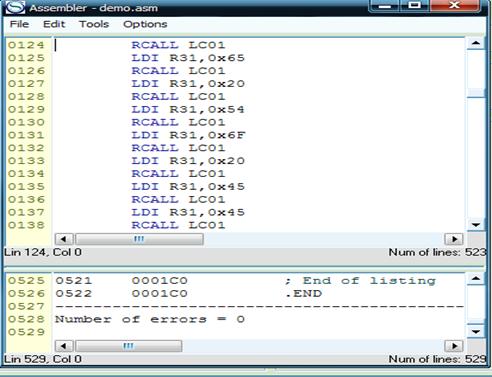

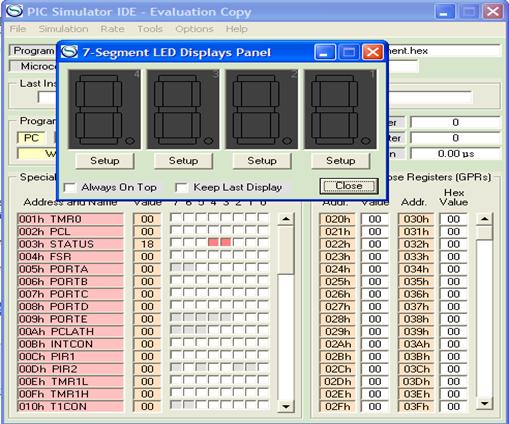

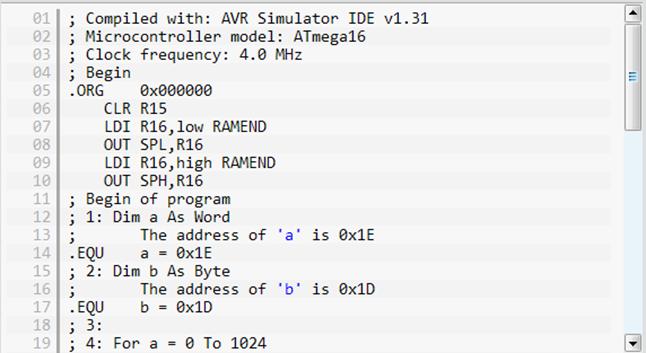
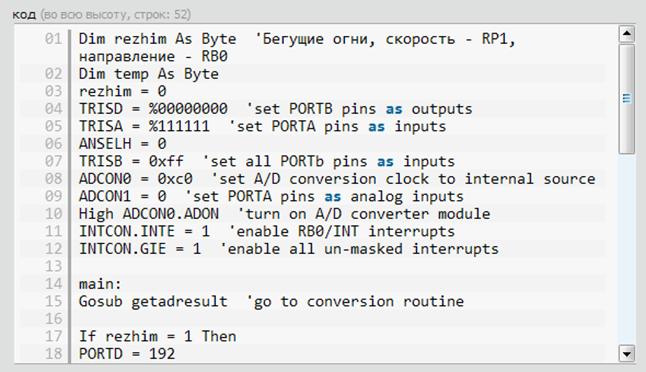
MPLAB IDE muxitida tizimlarni loyixalash..
Project menyusidan Project Wizard,
– Protsessor turi,
– Ishga tushirish jixozlari (Microchip MPASM Toolsuite) va
– Dasturiy til (MPASM Assembler),
– Fayl nomi
– ishchi direktoriya,
– dobavlyayutsya zaranee podgotovlennыe faylы.
– fayl name.asm nomlari Source files ro‘yxatdan va
– fayl konfiguratsiyalari Header files ro‘yxatidan belgilanadi.
View bo‘limidan:
– File register – registrlar bloki va ularning nomlari;
– Hardware Stack – stek xolati;
– Project – loyixa tarkibini kuzatish;
– Disassembly Listing – dastur listingi.
–
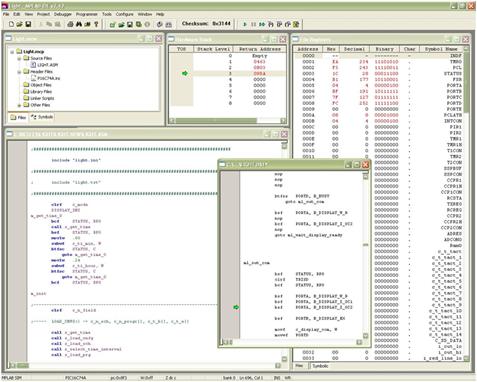
LIST p=16f77
INCLUDE p16f77.inc
LOOP NOP
NOP
NOP
INCF 20,W
DECF 20,F
GOTO LOOP
END
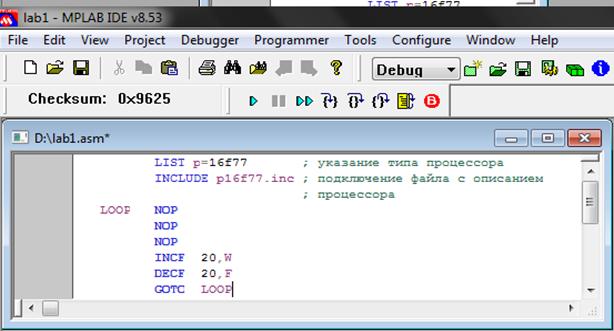
Debugger / Select Tool dan MPLAB SIM.bo‘limini tanlang va Build All yoki Run tugmachasi orqali ishga tushiring. Xatolik mavjud bo‘lmasa Build Succeeded xabari ko‘rsatiladi.
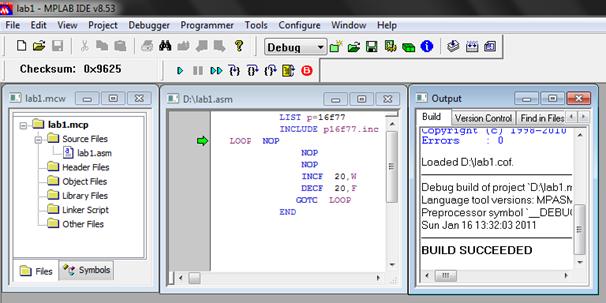
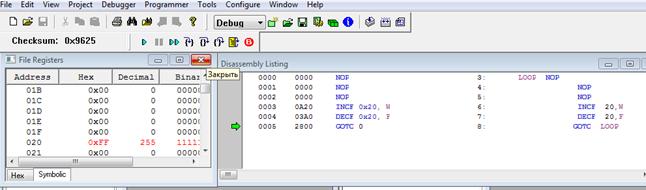
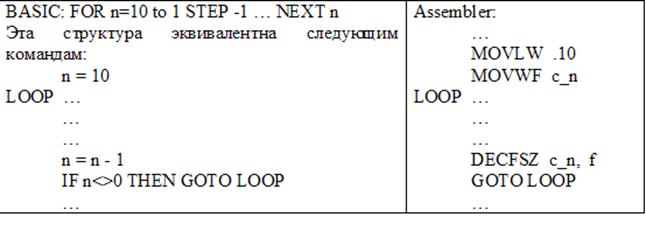 VMLAB - AVR mikrokontrollerlari asosida raqamli
qurilmalarni boshqarish dasturiy paketidir. Uning tarkibiga tashqi qurilmalar
bilan ulanishi mumkin bo‘lgan virtual qurilmalar kirgani uchun virtual
emulyator deb xam aytiladi. VMLAB juda oson assembler va S kompilyatorlari
bilan bog‘lana oladi:
VMLAB - AVR mikrokontrollerlari asosida raqamli
qurilmalarni boshqarish dasturiy paketidir. Uning tarkibiga tashqi qurilmalar
bilan ulanishi mumkin bo‘lgan virtual qurilmalar kirgani uchun virtual
emulyator deb xam aytiladi. VMLAB juda oson assembler va S kompilyatorlari
bilan bog‘lana oladi:
Kuchli ko‘p oynali matn redaktori;
Simvolik dasturlovchi;
aralash rejimdagi analog-raqamli modellashtirish;
kodni sifatli nazorati.
VMLAB o‘z navbatida ish jarayonida mikrokontrollerlar asosida boshqariladigan qurilmalarni apparat vositalari va dasturiy vositalari modeli ish jarayonini yaqqol nmoyon etadi. Uning afzalligi xam xech qanday payalniksiz modellashtirish imkoniyatining mavjudligidadir. Visual Micro Lab (VMLAB) dastur xatoliklarini ko‘rish imkoniyatini yaratadi.Mikrokontrollerga yuklanish fayli hex fayl yoki *.asm. Emulyator o‘z navbatida svetodiodlar, ossillograf, dastur yordamida temperaturani o‘zgartirishi, kristall chastotasi va parallel ravishda keltirilgan qurilmalarda belgilangan parametrlar ishlash jarayonini kuzatish mumkin.Undan tashqari registrlarda, EEPROM xotirasida mikrokntroller periferiya qurilmalardagi ish jarayonini xam namoyon etadi.
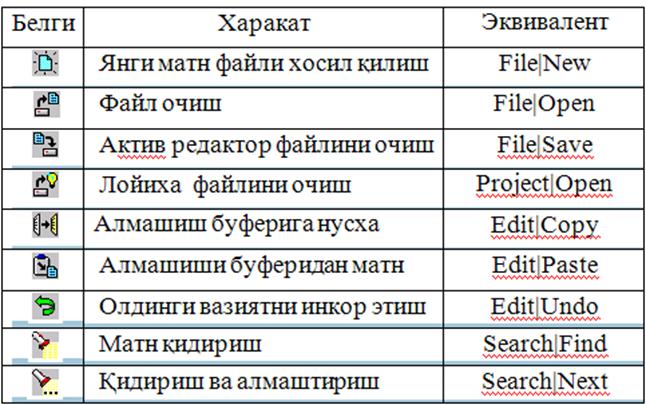
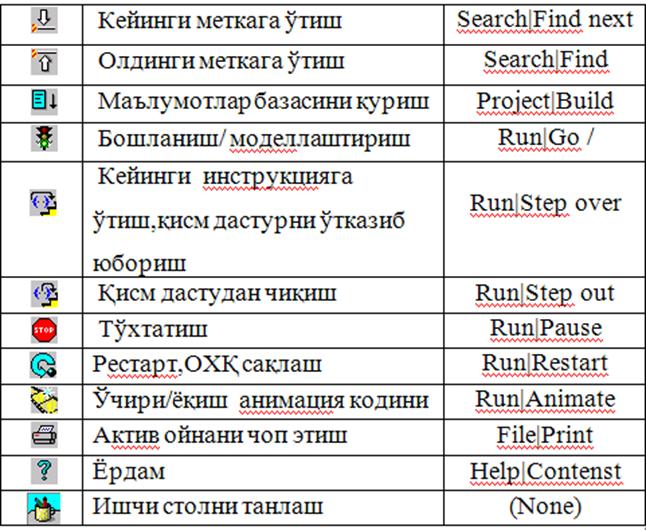
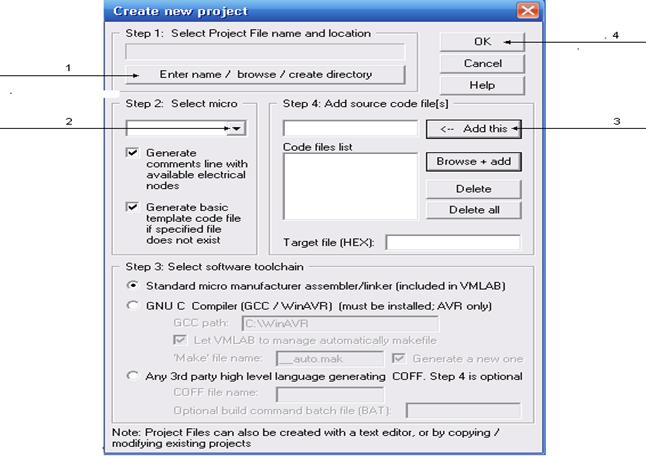
1.Loyixa nomi va uni qaerda saqlash joyi. Buning uchun kursorni olib kelib “Enter name …” va sichqonchaning chap tugmasi bilan belgilanadi. Kiritilayotgan nom 8 simvoldan kam bo‘lmasligi va albatta lotin xarflarida bo‘lishi kerak;
2. Loyixa yaratish uchun foydalanilayotgan mikrokontroller turi.Buning uchun “Select micro” va sichqonchaning chap tugmasi bilan ma’lumot kiritiladi;
3. Dasturiy fayl nomini kiritish. Agar nomni o‘zgartirish kerak bo‘lsa “Add source code file” va “Add this” oynasiga qo‘shimcha nom kiritish mumkin;
4. Keltirlgan parmetrlar asosida loyixa xosil qilish . “Create new project” + “OK” , VMLAB da 2ta oyna xosil bo‘ladi.
“Project file”, fayl oynasi (fayl kengaytmasi .prj);
“Code Notebook”, dasturiy fayl oynasi (fayl kengaytmasi .asm).
Keyinchalik barcha loyixa bilan bog‘liq ma’lumotlar keltirilgan oynalar bilan bog‘liq bo‘ladi.
VMLAB menyusida “Components” oynasidan aktiv elementlar ro‘yxatini tanlaymiz.
VMLAB nazorat panelida (Control Panel) 16-ta tugmacha mavjud bo‘lib, xar bir raqam 16 sanoq tizimidagi nomeriga ega.
LED diode (svetodiodni boshqarish)
Svetodiodni boshqarish – vizual komponent bo‘lib, ularning soni 8 va ularning xar biri o‘z nomeriga ega D1 to D8.
LCD komponentini kontroller JKI turi HD44780 firma Hitachi boshqaradi. Qator va belgilar kombinatsiyasi : 8x1, 8x2, 16x1, 16x2, 16x4, 20x1, 20x2, 20x4, 24x2 va 40x2.
“Scope” – ossillograf oynasi ,loyixa apparat vositalari kuchlanish epyurlarini ko‘rsatadi.

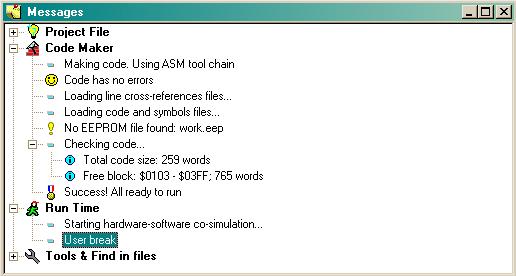
“MessaGES” oynasi
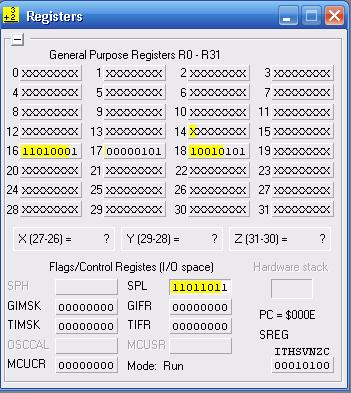
“Registers / Flags” oynasi.
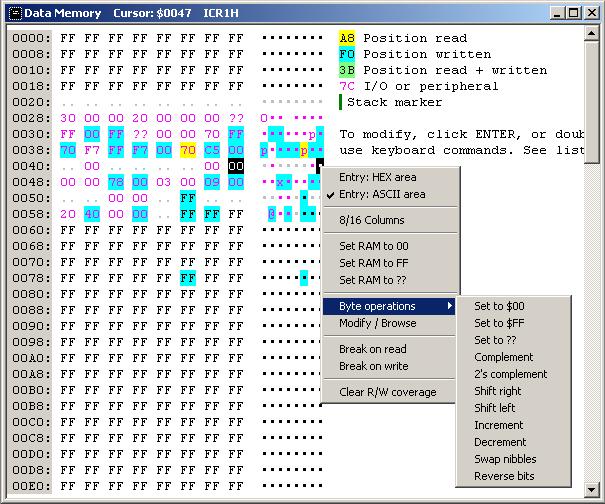
“Data memory” oynasi
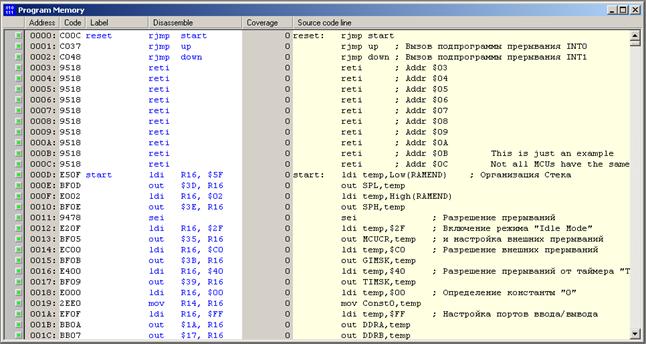 “Program memory”
oynasi
“Program memory”
oynasi
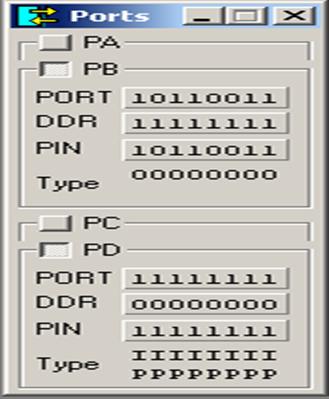 “Ports” oynasi
“Ports” oynasi

Nazarat savollari:
1. Registrlar bloki va ularning nomlarini sanab o‘ting.
2. Buyruqlar ketma ketligini aytib o‘ting.
3. “Ports” oynasiga izox keltiring.
IV. AMALIY MAShG‘ULOT MATERIALLARI
№1va №2. O‘rnatilgan tizimlarni loyihalash vositalari bilan tanishish va ularda ishlashni o‘rganish. Sodda o‘rnatilgan tizimlarni loyihalash
Ishdan maqsad: Sozlash platasi asosida mikrokantrollerni bitta elektrodini ma’lum vaqt oralig’ida yoqib o’chirish.
MK(mikrokantroller) – mikroprotsessor tizimining soddarog’i bo’lib, unda hamma yoki tizimni ko’pchilik tugunlari bitta mikrosxema shaklida qilingan.
AVR – Atmel firmasining sakkiz bitli mikrokantrollerlari 1996 yilda yaratilgan.
AVR ni qisqartmasini bir qancha kengaytmasi mavjud. Kimdir Advanced Virtual RISC (Kengaytirilgan virtual RISC) deb takidlaydi, boshqalar AVRni yaratgan ikki insonni ismini bosh harflar olingan deyishadi Alf Egil Bogen Vegard Wollan RISC.
AVR mikrokantorllerlari Garvard arxitekturasiga ega (dastur va ma’lumotlar hotirasi alohida bo’ladi) buyriqlar tizimi RISC g’oyasiga yaqin. AVR protsessori 32 ta 8 – bitdan iborat umumiy foydalanishga mo’ljallangan registirlarga ega, registirli fayllarga birlashtirilgan.
Ko’pchilik buyruqlar 1 ta yacheyka xotirani egalaydi(16 bit).
Ko’pchilik buyriqlar 1 davrda bajariladi.
Ularni quyidagi guruhlarga ajratish mumkin:
AVR mikrokontrollerlarini bir nechta guruhlarga ajratish mumkin:
- Mantiqiy operatsiyalar;
- Mantiqiy va surish operatsiyasi;
- Bitlar bilan ishlash;
- Uzatish operatsiyalari;
- Boshqarishni uzatish operatsiyasi;
- Tizimni boshqarish operatsiyasi.
Periferiya qurilmalarini boshqarish ma’lumot adres maydoni asosida boshqariladi. Qulaylik uchun qisqartirilgan IN/OUT buyruqlardan foydalaniladi.
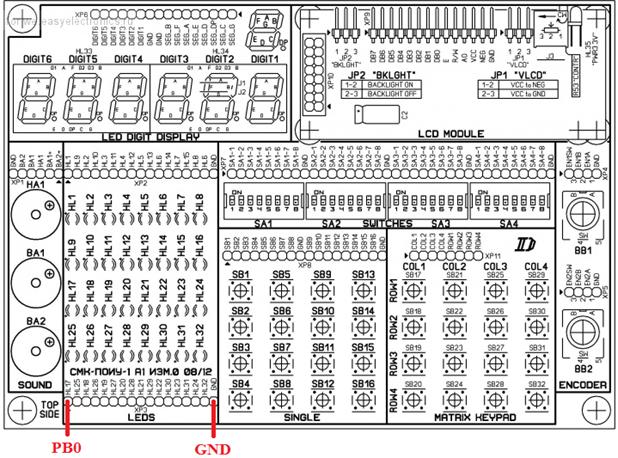

1.1- rasm. O’quv platasining umumiy ko’rinishi.
#include<avr/io.h> //Sarlavhali faylni ulash (Mkni registirlarini fizikmanzillarini ro’yhati)
#include<util/delay.h> // Sarlavhali faylni ulash (_delay_ms() va _delay_us()funksiyalarini yozilmasi)
intmain(void) //Asosiy funktsiya (dasturboshi)
{
DDRB= 0xFF; // PORTBnichiqishdebe’lonqilamiz
PORTB=0x00; //Bportda 0[V] deb o’rnatamiz
while(1) // Uzliksiz davr
{
PORTB = 0x01; //PORTB0ga 5[V]berilsin
_delay_ms(50); //PORTB0 50 ms yoqib turilsin
PORTB = 0x00; //PORTB0ga 0[V]berilsin
_delay_ms(50); //PORTB0 50 ms o’chiq turilsin
}
}
Nazorat savollari
1. Mikrokontroller deb nimaga aytiladi?
2. AVR qisqartma so’zining ma’nosini ayta olasizmi?
3. AVR mikrokontrollerlari qaysi firma tomonidan ishlab chiqariladi?
4. AVR mikrokontrollerlarini qanday guruhlarga ajratish mumkin?
5. AVR mikrokontrollerlari qanday arxitekturaga asoslangan?
Variantlar
|
№ |
Kuchlanish |
Yorug‘lik diodlari soni va rangi |
Qarshiliklar soni yorug‘lik diodlariga mos ravishda |
Kalitlar soni |
|
1 |
9 volt |
Green led 4x |
Resistor 4x |
SPST 2x |
|
2 |
9 volt |
Red led 2x, Green led 2x |
Resistor 4x |
SPST 1x |
|
3 |
10.5 volt |
Yellow led 3x |
Resistor 3x |
SPST 1x |
|
4 |
9 volt |
Red led 5x |
Resistor 5x |
SPST 1x |
|
5 |
11 volt |
Green led 3x |
Resistor 3x |
SPST 2x |
|
6 |
9 volt |
Red led 1x, Green led 1x |
Resistor 2x |
SPST 1x |
|
7 |
10.5 volt |
Red led 2x, Green led 2x |
Resistor 4x |
SPST 1x |
|
8 |
9 volt |
Yellow led 5x |
Resistor 5x |
SPST 2x |
|
9 |
11 volt |
Green led 3x |
Resistor 3x |
SPST 1x |
|
10 |
9 volt |
Red led 5x |
Resistor 5x |
SPST 1x |
|
11 |
8 volt |
Yellow led 5x |
Resistor 5x |
SPST 2x |
|
12 |
9 volt |
Yellow led 3x |
Resistor 3x |
SPST 1x |
|
13 |
8 volt |
Green led 4x |
Resistor 4x |
SPST 1x |
|
14 |
12 volt |
Red led 1x, Green led 1x |
Resistor 2x |
SPST 1x |
|
15 |
11 volt |
Yellow led 5x |
Resistor 5x |
SPST 2x |
|
16 |
12 volt |
Green led 3x |
Resistor 3x |
SPST 1x |
|
17 |
9.6 volt |
Green led 6x |
Resistor 6x |
SPST 1x |
|
18 |
12 volt |
Red led 2x, Green led 2x |
Resistor 4x |
SPST 1x |
|
19 |
10.5 volt |
Green led 6x |
Resistor 6x |
SPST 2x |
|
20 |
8 volt |
Yellow led 3x |
Resistor 3x |
SPST 1x |
|
21 |
11 volt |
Red led 5x |
Resistor 5x |
SPST 1x |
|
22 |
12 volt |
Green led 3x |
Resistor 3x |
SPST 1x |
|
23 |
11.1 volt |
Yellow led 5x |
Resistor 5x |
SPST 2x |
|
24 |
10.5 volt |
Red led 5x |
Resistor 5x |
SPST 1x |
|
25 |
11.1 volt |
Green led 3x |
Resistor 3x |
SPST 1x |
|
26 |
12 volt |
Red led 1x, Green led 1x |
Resistor 2x |
SPST 1x |
|
27 |
9.6 volt |
Red led 5x |
Resistor 5x |
SPST 2x |
|
28 |
8 volt |
Green led 4x |
Resistor 4x |
SPST 1x |
|
29 |
11 volt |
Yellow led 3x |
Resistor 3x |
SPST 1x |
|
30 |
9.6 volt |
Red led 2x, Green led 2x |
Resistor 4x |
SPST 2x |
№3 va №4 . Sodda o‘rnatilgan tizimlarni loyihalash
Ishdanmaqsad: Sozlash platasi asosida mikrokantrollerni tugmacha va svetodiodniga mantiqiy nol berish orqali mikrokantorllerni boshqa elektrodini yoqish.
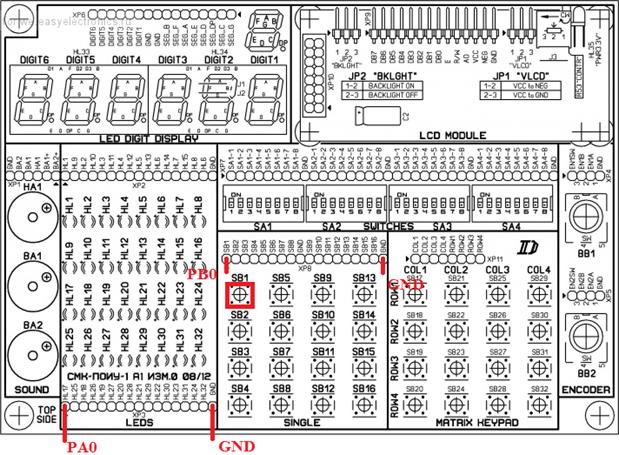
2.1-rasm. Atmega 16 mikrokontrolleri.
#include<avr/io.h> //Sarlavhali faylni ulash (MKni registirlarini fizik manzillarini ro’yxati)
#include<util/delay.h> // Sarlavhali faylni ulash (_delay_ms() va _delay_us()funksiyalarini yozilmasi)
intmain(void) //Asosiy funktsiya (dastur boshi)
{
DDRA= 0xFF; // PORTAni chiqish deb e’lonqilamiz
PORTA=0x00; //Aportda 0[V] deb o’rnatamiz
DDRB= 0x00; // PORTBni kirish deb e’lonqilamiz
PORTB=0xFF; //Bportda1[V] deb o’rnatamiz
while(1) // Uzliksiz davr
{
PORTA = ~ PORTB; //~ beligirazryadliinvertirlash
}
}
Sozlash platasi asosida mikrokantrollerni bitta elektrodi orqali tovushni hosil qilish.
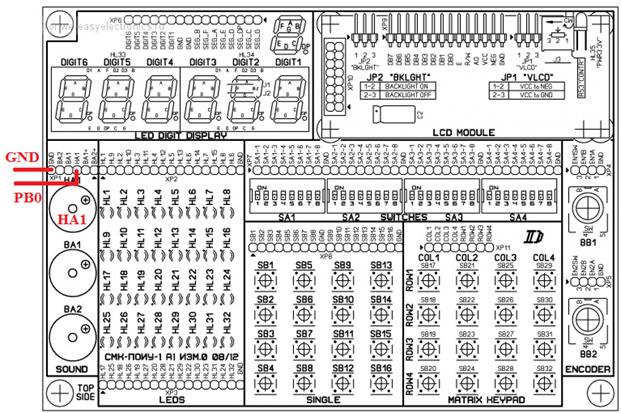
2.2-rasm. Ovoz signallarini ulash jarayonlari.
#include<avr/io.h> //Sarlavhali faylni ulash (MKniregistirlarinifizikmanzillariniro’yhati)
#include<util/delay.h> // Sarlavhali faylni ulash (_delay_ms() va _delay_us()funksiyalarini yozilmasi)
intmain(void) //Asosiyfunktsiya (dasturboshi)
{
DDRB= 0xFF; // PORTBni chiqish deb e’lonqilamiz
PORTB=0x00; //Bportda 0[V] deb o’rnatamiz
while(1) // Uzliksiz davr
{
PORTB = 0x01; //PORTB0ga 5[V]berilsin
_delay_ms(50); //PORTB0 50 ms yoqib turilsin
PORTB = 0x00; //PORTB0ga 0[V]berilsin
_delay_ms(50); //PORTB0 50 ms o’chiq turilsin
}
}
Nazorat savollari
1. Intmain(void) buyrug’i nima vazifani bajaradi?
2. Portlarni e’lon qilish uchun qaysi buyruqdan foydalaniladi?
3. Delay buyrug’i qanday vazifani bajaradi?
4. PORTB = 0x00 ushbu buyruqqa izoh bering.
Variant
1.Jurnaldagi tartib raqamingizga mos bo’lgan elektrodni yoqing va u jurnaldagi tartib raqamingizga mos ravishda( shuncha sekund vaqt oralig’ida) bir marta yonib-o’chishini ko’rsatib bering.
2. Jurnaldagi tartib raqamingizga mos bo’lgan elektrodni yoqing va u jurnaldagi tartib raqamingizga mos ravishda( shuncha marta) yonib-o’chishini ko’rsatib bering.
№ 5 va №6 . Embedded Arduino board. LCD displey asosida tizimlarni loyihalash
Ishdan maqsad. Arduino UNO yordamida LCD displey asosida tizimlarni loyihalash.
Arduino IDE muhitida LCD-displeya Hitachi HD44780 mavjud. LCD displey tiniqligi boshqaruv kirishiga berilayotgan kuchlanish o‘lchamiga bog‘liq. Kuchlanish 0.5-1 V oarlig‘ida bo‘lishi kerak, lekin muhit darajasiga ham bog‘liqdir. 5-jadvalda LCD-Arduino pinauti keltirilgan
5.1. -jadval. LCD-Arduino pinauti
|
LCD Pin |
Simvol |
Naznachenie |
Arduino Pin |
|
1 |
Vss |
Obщiy (0 V) |
Obщiy (0 V) |
|
2 |
Vdd |
Pitanie (4.5 – 5.5 V) |
+5V |
|
3 |
Vo |
Uprav.kontrastnostyu |
9 |
|
4 |
RS |
H/L register select signal |
12 |
|
5 |
R/W |
H/L read/write signal |
Obщiy (0 V) |
|
6 |
E |
H/L enablesignal |
11 |
|
11 |
DB4 |
H/L data bus for 4-bit mode |
5 |
|
12 |
DB5 |
H/L data bus for 4--bit mode |
4 |
|
13 |
DB6 |
H/L data bus for 4-bit mode |
3 |
|
14 |
DB7 |
H/L data bus for 4-bit mode |
2 |
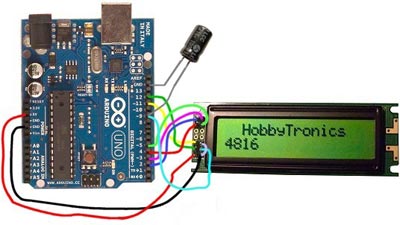
5.1 -rasm. Ulanish jarayoni
Liquid Crystal kutubxonasi barcha LCD Hitachi HD44780 bilan ishlaydi.
Ulanish sxemasi:
* LCD RS pin raqamli chiqish 12
* LCD Enable pin raqamli chiqish 11
* LCD R/W umumiy
* LCD VO pin (pin 3) ShIMga-chiqish 9
* LCD D4 pin raqamli chiqish 5
* LCD D5 pin raqamli chiqish 4
* LCD D6 pin raqamli chiqish 3
* LCD D7 pin raqamli chiqish 2
*/
#include // kutubxonani ulaymiz
Liquid Crystallcd (12, 11, 5, 4, 3, 2); // initsializatsiyalash
Void setup()
{
pinMode(9, OUTPUT);
analogWrite(9, 50); // ShIM chiqishga o‘rnatish
lcd.begin(16, 2); // qator va ustunlar miqdorini o‘rnatish
lcd.print(" HobbyTronics"); //ma’lumotlarni LCD ga uzatish
}
voidloop()
{
// kursorni v 0-chi ustunga, 1 qator ( 0 dan boshlanadi)
lcd.setCursor(0, 1);
lcd.print(millis()/1000); // qayta yuklashdan so‘ng sekund chop etish
}
Nazorat savollari
1. LCD displey tiniqligi nimaga bog’liq?
2. LCD Hitachi HD44780 qaysi kutubxona bilan ishlaydi?
3. LCD-Arduino pinauti haqida nimalar bilasiz?
4. Arduino muhiti qanday muhit?
Variantlar
1. "Smart uy" loyihasiga asosan maxsus qurilma tayyorlanmoqda. Bu uskumaning vazifasi yoritish chiroqlari ish vaqtini hisoblash orqali elektr energiya iste'molini aniqlashdan iborat. Qurilma algaritmiga asosan takt tugma bosilganda elektr chiroq yonishi va mikrokontroller schetchigi bittaga oshishi kerak. Tugmaning navbatdagi bosilishi chiroqni o'chiradi. Yuqorida bayon qilingan algaritm asosida mikrokontroller uchun bosh sikldadastur fragmentini tuzing. Inson qo'li titrashi hisobiga tugma bosilganda ulab-uzishlar soni oshib ketadi. Dasturda bu effekt mavjud emas deb hisoblash mumkin.
Namunaviy javob:
|
1.Bosh siklda davriy ravishda tugma holatini tekshirish. ATmega16A, 16MHz
main(){
int schetchik=0; int tugma_status=1; // 1=tugma bosilmangan, 0=tugma bosilgan ...
DDRD=0b00000010; //PORTD.1- chiqish rejimida,chiroq uchun //PORTD.2- kirish rejimida,tugma uchun
PORTD=0b00000100; //PORTD.1 - chiroq dastlabki holatda o'chgan //PORTD.2 - kirish porti manbaga ichki rezistor // orqali ulangan ... while () { if (PORTD.2==0) //agar tugma bosilgan bo'lsa { if (tugma_status==1) { tugma_status==0; schetchik++; // schetchik qiymatini ishiramiz if (PORTD.1==0xff) {PORTD.1=0;} // chiroqni o’chiramiz else PORTD.1=0xff; //yoki yoqamiz } else { //tugma bosilgan holatcha turibdi } } else tugma_status=1; //tugma bosilmagan }; |
2. "Smart uy" loyihasiga asosan maxsus qurilma tayyorlanmoqda. Bu uskumaning vazifasi yoritish chiroqlari ish vaqtini hisoblash orqali elektr energiya iste'molini aniqlashdan iborat. Qurilma algaritmiga asosan takt tugma bosilganda elektr chiroq yonishi va mikrokontroller schetchigi bittaga oshishi kerak. Tugmaning navbatdagi bosilishi chiroqni o'chiradi. Yuqorida bayon qilingan algaritm asosida mikrokontroller uchun taymer orqali tugma holatini tekshirish dastur fragmentini tuzing. Inson qo'li titrashi hisobiga tugma bosilganda ulab-uzishlar soni oshib ketadi. Dasturda bu effekt mavjud emas deb hisoblash mumkin.
Namunaviy javob:
|
2. Timer orqali har 100 ms da tugma holatini tekshirish. ATmega16A, 16MHz ...
//Global o'zgaruvchilar int schetchik=0; int tugma_status=1; // 1=tugma bosilmangan, 0=tugma bosilgan
...
//Timer 1 bo'yicha uzilishga ishlov berish funksiyasi interrupt [TIM1_OVF] void timer1_ovf_isr(void) { TCNT1H=0x9E58 >> 8; // Timer1ni boshlang'ich holatga o'tkazish TCNT1L=0x9E58 & 0xff;
if (PORTD.2==0) //agar tugma bosilgan bo'lsa { if (tugma_status==1) { tugma_status==0; schetchik++; // schetchik qiymatini ishiramiz PORTD.1=(PORTD.1==0xff)?(0):(0xff); // chiroqni yoqamiz yoki o’chiramiz } else { //tugma bosilgan holatcha turibdi } } else tugma_status=1; //tugma bosilmagan
} ... main(){ ... DDRD=0b00000010; //PORTD.1- chiqish rejimida,chiroq uchun //PORTD.2- kirish rejimida,tugma uchun
PORTD=0b00000100; //PORTD.1 - chiroq dastlabki holatda o'chgan //PORTD.2 - kirish porti manbaga ichki rezistor // orqali ulangan ...
// Timer1: 250 kHz, Uzilish= har 100ms da, hisoblagich to'lganda TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10); TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (1<<CS10); TCNT1H=0x9E; TCNT1L=0x58; TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (1<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
#asm("sei") // uzilishlarga global ruxsat berish
while () { /* tugma holati tekshirilguncha qurilma boshqa funksiyalarini bajarishi mumkin */ zahirada 100 msek vaqt bor }; |
3. "Smart uy" loyihasiga asosan maxsus qurilma tayyorlanmoqda. Bu uskumaning vazifasi yoritish chiroqlari ish vaqtini hisoblash orqali elektr energiya iste'molini aniqlashdan iborat. Qurilma algaritmiga asosan takt tugma bosilganda elektr chiroq yonishi va mikrokontroller schetchigi bittaga oshishi kerak. Tugmaning navbatdagi bosilishi chiroqni o'chiradi. Yuqorida bayon qilingan algaritm asosida mikrokontroller uchun tashqi uzilish manbasi(external IRQ) yordamida ishlovchi dastur fragmentini tuzing. Inson qo'li titrashi hisobiga tugma bosilganda ulab-uzishlar soni oshib ketadi. Dasturda bu effekt mavjud emas deb hisoblash mumkin.
Namunaviy javob:
|
3. “Any change” IRQ orqali tugma holatini tekshirish. ATmega16A, 16MHz ... //Global o'zgaruvchilar int schetchik=0; int tugma_status=1; // 1=tugma bosilmangan, 0=tugma bosilgan
...
/* PORTD.2 ga berilgan signal mantiqiy o’zgarganda (0->1 yoki 1->0) uzulishlarga ishlov berish funksiyasi ishga tushadi. */ interrupt [EXT_INT0] void ext_int0_isr(void) { if (PORTD.2==0) //agar tugma bosilgan bo'lsa { if (tugma_status==1) { tugma_status==0; schetchik++; // schetchik qiymatini ishiramiz PORTD^=(1<PORTD.2); // chiroqni yoqamiz yoki o’chiramiz } else { //tugma bosilgan holatcha turibdi } } else tugma_status=1; //tugma bosilmagan
} ...
main(){ ... DDRD=0b00000010; //PORTD.1- chiqish rejimida,chiroq uchun //PORTD.2- kirish rejimida,tugma uchun
PORTD=0b00000100; //PORTD.1 - chiroq dastlabki holatda o'chgan //PORTD.2 - kirish porti manbaga ichki rezistor // orqali ulangan ...
// IRQ, INT0 : Any change, GICR|=(0<<INT1) | (1<<INT0) | (0<<INT2); MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (1<<ISC00); MCUCSR=(0<<ISC2); GIFR=(0<<INTF1) | (1<<INTF0) | (0<<INTF2);
#asm("sei") // uzilishlarga global ruxsat berish
while () { /* tugma holati tekshirilguncha qurilma boshqa funksiyalarini bajarishi mumkin */ zahirada ancha vaqt bo’ladi };
|
4. Elektronika va sxematexnika fanlari uchun turli shakldagi signallarni hosil qiluvchi generator tayyorlash vazifasi qo’yildi. Generator bir vaqtda 3ta chiqish kanali orqali signallarni hosil qilishi kerak. Maksimal generatsiyalanadigan signal chastotasi 1Mhz. Birinchi kanalda sinusoidal funksiyaga o’xshash bo’lgan signallarni generatsiyalash dasturini AVR ATmega oilasiga mansub bo’lgan mikrokontroller asosida tuzing.
5. Elektronika va sxematexnika fanlari uchun turli shakldagi signallarni hosil qiluvchi generator tayyorlash vazifasi qo’yildi. Generator bir vaqtda 3ta chiqish kanali orqali signallarni hosil qilishi kerak. Maksimal generatsiyalanadigan signal chastotasi 1Mhz. Birinchi kanalda y=sin(x), ikkinchi kanalda y=cos(x) funksiyaga o’xshash bo’lgan signallarni generatsiyalash dasturini AVR ATmega oilasiga mansub bo’lgan mikrokontroller asosida tuzing.
6. Elektronika va sxematexnika fanlari uchun turli shakldagi signallarni hosil qiluvchi generator tayyorlash vazifasi qo’yildi. Generator bir vaqtda 3ta chiqish kanali orqali signallarni hosil qilishi kerak. Maksimal generatsiyalanadigan signal chastotasi 1Mhz. Birinchi kanalda y=sin(x), ikkinchi kanalda y=cos(x) funksiyaga o’xshash va uchunchi kanalda to’ldirish koeffisienti D=40% bo’lgan impuls signallarni generatsiyalash dasturini AVR ATmega oilasiga mansub bo’lgan mikrokontroller asosida tuzing.
7. Klimitni nazorat qilish tizimini yaratish ustida ish olib borilmoqda. Qurilma havo harorati va namligini o’lchasi, temperature 500C dan ko’tarilganda yoki absolyut namlik 75% dan oshganda signal beruvchi chiroq yonishi kerak.Havo temperaturasini aniqlash uchun T-tipidagi termoparadan foydalanish zarurati tug’ildi. Bir nechta passiv kompanentlar va mikrokontroller asosida datchikdan foydalanib havo haroratini o’lchash sxemasi va dasturini tuzing.
8. Klimitni nazorat qilish tizimini yaratish ustida ish olib borilmoqda. Qurilma havo harorati va namligini o’lchasi, agar temperature 500C dan ko’tarilganda yoki absolyut namlik 75% dan oshganda signal beruvchi chiroq yonishi kerak.Havoning nisbiy namligini aniqlash uchun sig’imli passiv namlik datchigidan foydalanish zarurati tug’ildi. Bir nechta passiv kompanentlar va mikrokontroller asosida datchikdan foydalanib havoning namligini o’lchash sxemasi va dasturini tuzing.
9. Klimitni nazorat qilish tizimini yaratish ustida ish olib borilmoqda. Qurilma havo harorati va namligini o’lchasi, agar temperature 500C dan ko’tarilganda yoki absolyut namlik 75% dan oshganda signal beruvchi chiroq yonishi kerak.Havo temperaturasini aniqlash uchun T-tipidagi termoparadan, havoning nisbiy namligini aniqlash uchun sig’imli passiv namlik datchigidan foydalanish zarurati tug’ildi. Bir nechta passiv kompanentlar va mikrokontroller asosida datchikdan foydalanib havo harorati,namligini o’lchash va signalizatsiya uchun sxema va dastur tuzing.
10. Har birida 8tadan nuqtaga ega bo’lgan segmentli indikatorlar orqali 5 ta simvolli axborotni ko’rsatish talab etilmoqda. AVR ATmega oilasiga mansub bo’lgan mikrokontroller asosida qurilma uchun dastur tuzing.
№7 va №8 . O‘rnatilgan ma’lumot uzatish tizimini loyihalash (Interfeyslar USART va SPI)
Ishdan maqsad: Kompyuter SOM porti asosida Arduino ga ulangan qurilmalarni boshqarish.
Arduino — apparat hisoblash platformasi hisoblanib, asosiy komponetlari oddiy kiritish/chiqarish platasi va Processing/Wiring dasturiy tilni qo‘llaydigan dasturiy muhit hisoblanadi . Arduino avtonom interaktiv ob’ektlarni yaratishda to‘g‘ridan to‘g‘ri kompyuterga ulangan holda dasturlash jarayonini amalga oshirish mumkin bo‘lgan qurilma hisoblanadi (masalan, Macromedia Flash, Processing, Max/MSP, Pure Data, SuperCollider). Mikrokontroller Atmega 328 arzon va qo‘llanishga qulay hisoblanadi.
Arduino — elektron konstruktor va foydalanuvchi uchun elektron qurilmalarni yaratish mumkin bo‘lgan platforma hisoblanadi. Platforma jahonda qulayligi va dasturiy tillarining oddiyligi uchun keng qo‘llaniladi. Qurilma programmatorsiz USB orqali dasturlanadi.
Platadagi mikrokontroller Wiring dasturiy tilga asoslangan Arduino tilida dasturlanadi.
Arduino platformasi apparat qismi Arduino platformasining bir necha versiyalari mavjud bo‘lib, ulardan Leonardo AT mega 32u4 mikrokontrolleri bazasi asosida yaratilgan. Uno esa Atmel AT mega 328 mikrokontrolleri asosida yaratilgan.
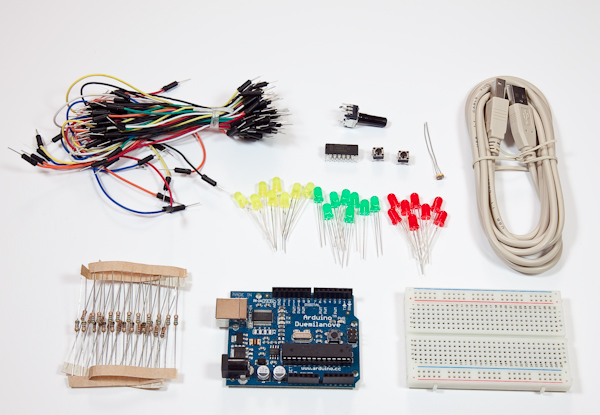
7.1-rasm. Arduino platformasi
Arduino platformasi versiyalari:
§ Due — yangi plata ARM mikroprotsessori asosida 32bit Cortex-M3 ARM SAM3U4E.
§ Leonardo — Arduno yangi platforma ATmega 32u4 mikrokontroller asosida .
§ Yun - yangi plata, o‘rnatilgan WiFi ni qo‘llaydi ATmega 32u4 and the Atheros AR9331 asosida.
§ Micro — AT mega32u4 asosidagi yangi loyiha .
§ Uno —Arduino USB ko‘p foydalaniladigan versiya. Uni o‘zida standart port USB saqlaydi. Platforma o‘z navbatida kengaytirilgan platalar va foydalanuvchi turli funksiyalari bilan to‘ldirilishi mumkin.
§ Nano — kompakt platforma hisoblanib, maket ko‘rinishida foydalaniladi. Nano kompyuterga USB Mini-B kabeli asosida ulanadi.
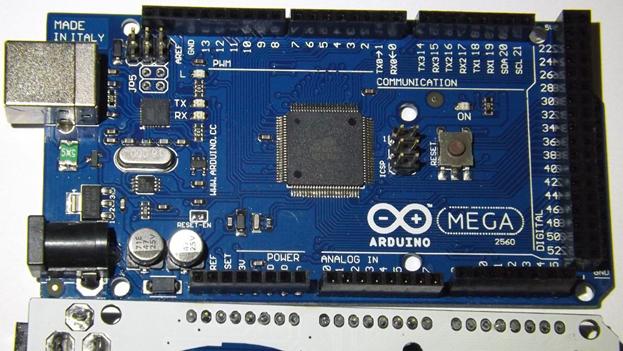


7.2.-rasm. Arduino platasi umumiy ko‘rinishi
Kengaytirilgan platalar asosan turli qurilmalarni boshqarishda va ma’lumotlar olishda foydalaniladi:
§ Plata WiFi - 802.11 b/g simsiz tarmoq standarti bilan ulanishda foydalaniladi.
Plata Xbee Shield - Maxstream Xbee Zigbee modullari asosida bir necha Arduino bilan 35 metr radiusdagi maydonni va 90 metr maydondan tashqari simsiz aloqani ta’minlaydi.
§ Plata Motor Shield – doimiy tok dvigatellarini boshqarish va datchiklar holatini o‘qishda foydalaniladi.
§ Plata Ethernet Shield – internetga ulanishni ta’minlaydi.
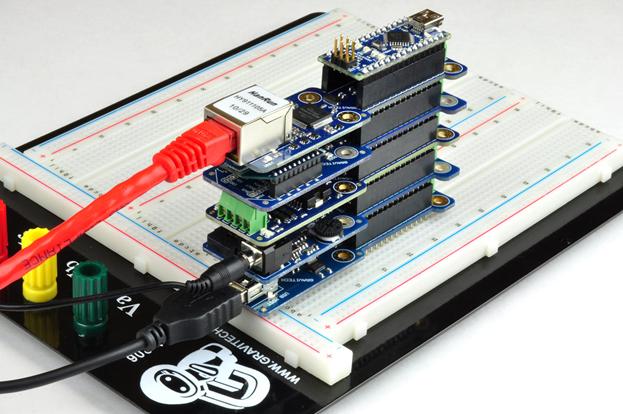
8.1-rasm. Plata Ethernet Shield
Keltiriladigan masalalarda svetodiodlarni boshqarishda murakkab dasturlash jarayonlari orqali ko‘rish mumkin.
Ishni bajarish uchun 5 ta svetodiod (turli rangli) va 5 rezistor (rasm 7.1).
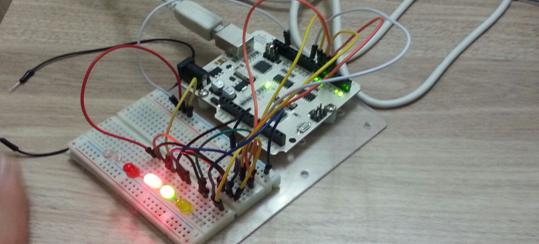
8.2- rasm. Arduino ga ulangan qurilmalarni boshqarish
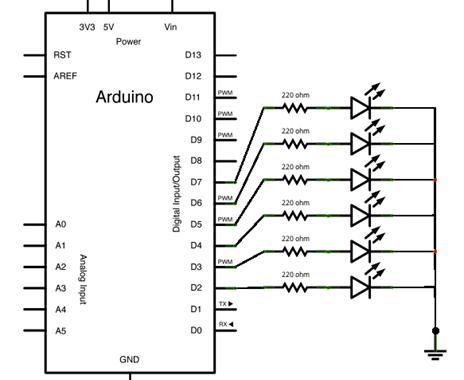
8.2- rasm. Arduino ga ulangan qurilmalarni boshqarish prinsipial sxemasi.
Keltirilgan sxemada 6 svetodiodlar raqamli pinlarga 2-7 ulangan (mojno podklyuchit 5 svetodiodov k pinam 4-8 pinlarga ulangan. Ushbu ulanish pin (digitalWrite) dastur asosida kuchlanish beriladi va tok rezistor asosida oqib o‘tib svetodiod anod (+) ga uzatiladi . Elektrik tok svetodiod yorug‘lik energiyasiga aylanadi (fotonlar) , shuning uchun katod (—) yerga (Ground) ulanishi kerak.
Mavjud 6 svetodioddan , 1- chini pin №2 ga (yoki pin №4 ga), 2-chi svetodiod pin №3 ga (yoki pin №5 ga), 3-chi pin №4 ga (yoki №6 ga), 4-chi pin №5 ga (yoki pin №7 ga), 5-chi pin №6 ga (yoki pin №8 ga) va 6-chi svetodiod pin №7 ga.
Qurilmani dasturiy ta’minoti Arduino IDE muhitida bajariladi va Servis menyusida Monitor porti mavjud (Ctrl+Shift+M).
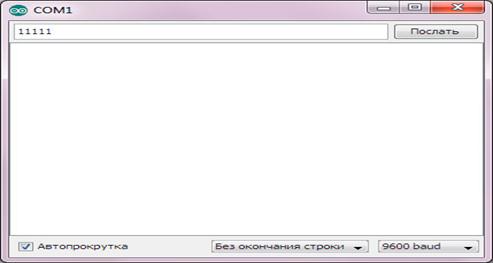
8.3- Rasm. Monitor porti
COM-port asosida ulangan Arduinoga kompyuter orqali ixtiyoriy simvollarni uzatish mumkin. Uzatish natijasida ba’zi bir harakatlarni boshqarish mumkin, masalan «1» raqami svetodiodni yoqish va «0» raqami svetodiodni o‘chirish vazifasini bajarladi.
8.4-rasm. Arduino platasiga ulanish
Uzatilgan simvollar to‘plami svetodiodlarni boshqaradi.
Monitor COM-porta orqali Arduino IDE ga uzatilgan masalan «10110» qator svetodiodlar №1, 3 va 4 yoqadi va svetodiodlar №2, №5 ( pozitsiyaga nisbatan) o‘chiradi.
Dastur qismida klass Si – Serial dan foydalaniladi:
§ Serial.begin – portdan (COM-porta) foydalanishga tayyorlik;
§ Serial.print – ma’lumotlarni Arduino dan kompyuterga uzatish va Monitor portda aks ettirish;
§ Serial.read – Arduino yordamida ma’lumotlarni kompyuterdan o‘qish (masalan: «10110» qatorni o‘qish). Serial funksiyasi to‘plami Arduino bilan kompyuter orasidagi aloqachi vazifasini bajaradi.
Barcha Arduino platalari hech bo‘lmaganda bitta ketma-ket portga ega port UART yoki USART. Serial ma’lumot almashish uchun raqamli k\ch portlardan
0 (RX) va 1 (TX), USB foydalaniladi.
Plata Arduino Mega o‘zida 3-ta ketma ket portlarni saqlaydi:
Serial1 port 19 (RX) va 18 (TX), Serial2 port 17 (RX) va 16 (TX), Serial3 port 15 (RX) va 14 (TX). Keltirilgan portlarni kompyuter bilan aloqa uchun foydalanishda qo‘shimcha adapterlar USB-to-serial ishlatiladi, chunki Mega platasi o‘rnatilgan tizimiga ulanmagan. Ketma-ket interfeys orqali tashqi qurilmalar bilan aloqa o‘rnatish uchun qurilmadagi TX portni tashqi qurilma RX porti bilan ulang.

8.5-rasm. Portlarni ulash jarayonlari
Nazorat savollari
1. Arduino muhitida qurimalar bilan ishlayotganda katod nimaga ulanishi kerak?
2. Serial.begin buyrug’i nima vazifa bajaradi?
3. Serial.print buyrug’i nima vazifa bajaradi?
4. Serial.read buyrug’i nima vazifa bajaradi?
5.Svetodiodlarni nimalar boshqaradi?
Variantlar
1. Haroratni monitoring qilish uchun kun davomida termodatchikdan 24 marotaba ma'lumot qabul qilib oldindi va mikrokontroller xotirasida massiv shaklida saqlanmoqda. Berilgan ma'lumotlarni haroratning kamayish tartibida sortirovkalab boshqa massivga saqlovchi dastur fragmentini tuzing.
2. Haroratni monitoring qilish uchun kun davomida termodatchikdan 24 marotaba ma'lumot qabul qilib oldindi va mikrokontroller xotirasida massiv shaklida saqlanmoqda. Ma'lumotlar havo harorati va qabul qilingan vaqt (soat) dan iborat. Berilgan ma'lumotlarni haroratning oshishi tartibida sortirovkalab boshqa massivga saqlovchi dastur fragmentini tuzing.
3. Haroratni monitoring qilish uchun kun davomida termodatchikdan 24 marotaba ma'lumot qabul qilib oldindi va mikrokontroller xotirasida massiv shaklida saqlanmoqda. Ma'lumotlar havo harorati va qabul qilingan vaqt (soat:min:sek) dan iborat. Berilgan ma'lumotlarni haroratning oshishi tartibida sortirovkalab boshqa massivga saqlovchi dastur fragmentini tuzing.
4. Ilmiy-taqdiqot laboratoriyasidagi maxsus kabinada turli gazlardan iborat muhit hosil qilingan. Tarkibini barqaror saqlab turish maqsadida o'rtanilgan tizim ishlab chiqish zarur. Kabina ichida elektron qurilmalardan foydalanish imkoni mavjud emas.Kabinaga kirish eshigi ochilib 5 sekund ichida yopilmasa gazlar tarkibi o'zgarishini hisobga olib belgilangan vaqtdan oshganda signalizatsiya ishga tushishi zarur bo'lgan dasturni bosh siklda tuzing.
5. Ilmiy-taqdiqot laboratoriyasidagi maxsus kabinada turli gazlardan iborat muhit hosil qilingan. Tarkibini barqaror saqlab turish maqsadida o'rtanilgan tizim ishlab chiqish zarur. Kabina ichida elektron qurilmalardan foydalanish imkoni mavjud emas. Kabinaga kirish eshigi ochilib 5 sekund ichida yopilmasa gazlar tarkibi o'zgarishini hisobga olib belgilangan vaqtdan oshganda signalizatsiya ishga tushishi zarur bo'lgan dasturni taymer asosida tuzing.
6. Ilmiy-taqdiqot laboratoriyasidagi maxsus kabinada turli gazlardan iborat muhit hosil qilingan. Tarkibini barqaror saqlab turish maqsadida o'rtanilgan tizim ishlab chiqish zarur. Kabina ichida elektron qurilmalardan foydalanish imkoni mavjud emas. Kabinaga kirish eshigi ochilib 5 sekund ichida yopilmasa gazlar tarkibi o'zgarishini hisobga olib belgilangan vaqtdan oshganda signalizatsiya ishga tushishi zarur bo'lgan dasturni tashqi uzilishlar (external IRQ) asosida tuzing.
7. Aqlli ventilyator loyihasini amalga oshirish uchun maket tayyorlanmoqda. Kichiq quvvatli elektromatorni turli tezlikda boshqarish dasturini bosh siklda AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida tuzing.
8. Aqlli ventilyator loyihasini amalga oshirish uchun maket tayyorlanmoqda.Kichiq quvvatli elektromatorni turli tezlikda boshqarish dasturini taymer yordamida AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida tuzing.
9. Aqlli ventilyator loyihasini amalga oshirish uchun maket tayyorlanmoqda. Qurilma DS18b20 termodatchigi va kichiq quvvatli elektromatordan iborat. Harorat 250C dan 350C gacha o'zgarganda elektromator aylanish tezligini 50% dan 100% gacha o'zgartiradigan dasturini AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida tuzing.
10. Signalizatsiya tizimini ishlab chiqarish masalasi qo’yildi. Unga ko’ra maxsus xona eshigiga o’rnatiladigan signalizatsion qurilma eshik ochilgach o’rnatilgan vaqtdan oshib ketganda yorug’lik indikatsiyasini amalga oshirish kerak. Eshik ochilib yopilishini aniqlash maqsadida gerkondan foydalanilmoqda. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur tuzing.
11. Signalizatsiya tizimini ishlab chiqarish masalasi qo’yildi. Unga ko’ra maxsus xona eshigiga o’rnatiladigan signalizatsion qurilma eshik ochilgach o’rnatilgan vaqtdan oshib ketganda yorug’lik va tovush indikatsiyasini amalga oshirish kerak. Eshik ochilib yopilishini aniqlash maqsadida gerkondan foydalanilmoqda. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur tuzing.
12. Signalizatsiya tizimini ishlab chiqarish masalasi qo’yildi. Unga ko’ra maxsus xona eshigiga o’rnatiladigan signalizatsion qurilma eshik ochilgach o’rnatilgan vaqtdan oshib ketganda yorug’lik va tovush indikatsiyasini amalga oshirish kerak. Eshik ochilib yopilishini aniqlash maqsadida gerkondan foydalanilmoqda. Signalizatsiya ishga tushish vaqti potonsiometr yordamida o’rnatiladi. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur tuzing.
13. Kichik ilmiy laboratoriya uchun magnit maydon kuchlanganligini aniqlovchi katta aniqlikka ega bo’lmagan qurilma tayyorlashga ehtiyoj tug’ildi. Buning uchun olimlar bir qancha gerkonlardan foydalanishni maqul ko’rishdi. Ushbu qurilmaning ishlash algoritmini tuzing va dastur fragmentini yozing.
14. Kichik ilmiy laboratoriya uchun magnit maydon kuchlanganligini aniqlovchi katta aniqlikka ega bo’lmagan qurilma tayyorlashga ehtiyoj tug’ildi. Buning uchun olimlar bir qancha gerkonlardan foydalanishni maqul ko’rishdi. Olingan natijalarni yorug’lik diodlaridan iborat bo’lgan lineyka asosida tasvirlashmoqchi. Ushbu qurilmaning ishlash algoritmini tuzing va dastur fragmentini yozing.
15. Kichik ilmiy laboratoriya uchun magnit maydon kuchlanganligini aniqlovchi katta aniqlikka ega bo’lmagan qurilma tayyorlashga ehtiyoj tug’ildi. Buning uchun olimlar bir qancha gerkonlardan foydalanishni maqul ko’rishdi. Olingan natijalarni yorug’lik diodlaridan iborat bo’lgan lineyka asosida tasvirlab, UASRT orqali kompyuterga uzatishmoqchi. Ushbu qurilmaning ishlash algoritmini tuzing va dastur fragmentini yozing.
16. Magnit maydon kuchlanganligi asosida ishlovchi gerkon yordamida maxsus yashik ochilganligi yoki yopiq ekanligini aniqlovchi dastur fragmentini AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida tuzing.
17. Magnit maydon kuchlanganligi asosida ishlovchi gerkon yordamida maxsus yashik ochilganligi yoki yopiq ekanligini aniqlovchi va bunga mos ravishda yorug’lik indikatsiyalarini namoyon qiluvchi dastur fragmentini AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida tuzing.
18. Magnit maydon kuchlanganligi asosida ishlovchi gerkon yordamida maxsus yashik ochilganligi yoki yopiq ekanligini aniqlovchi va bunga mos ravishda yorug’lik va tovush indikatsiyalarini namoyon qiluvchi dastur fragmentini AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida tuzing.
19. Aqlli signalizatsiya loyihasida ishga tushish vaqtini yorug’lik diodlarida vizual tasvirlash masalasi qo’yildi. Unga ko’ra signalizatsiya hisob vaqti boshlanib toki ishga tushguncha yorug’lik diodlari o’z rangini qoradan oqqacha asta sekinlik bilan o’zgartirishi kerak. Buning uchun RGB yorug’lik diodlaridan foydalaniladi. Ishga tushish vaqti dasturlash jarayonida o’rnatiladi va qurilma ish davomida o’zgarmay qoladi. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
20. Aqlli signalizatsiya loyihasida ishga tushish vaqtini yorug’lik diodlarida vizual tasvirlash masalasi qo’yildi. Unga ko’ra signalizatsiya hisob vaqti boshlanib toki ishga tushguncha yorug’lik diodlari o’z rangini qoradan oqqacha asta sekinlik bilan o’zgartirishi kerak. Buning uchun RGB yorug’lik diodlaridan foydalaniladi. Ishga tushish vaqti qurilma ish davomida o’zgarishi mumkin. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
21. Aqlli signalizatsiya loyihasida ishga tushish vaqtini yorug’lik diodlarida vizual tasvirlash masalasi qo’yildi. Unga ko’ra signalizatsiya hisob vaqti boshlanib toki ishga tushguncha yorug’lik diodlari o’z rangini dastlab qoradan oqqacha, so’ng sariqqa, keyin qizilga asta sekinlik bilan o’zgartirishi kerak. Buning uchun RGB yorug’lik diodlaridan foydalaniladi. Ishga tushish vaqti qurilma ish davomida o’zgarishi mumkin. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
22. Aqlli klavyatura loyihasi uchun maxsus buyruqlarni kompyuterga uzatuvchi tugmalardan foydalanish ko’zda tutilmoqda. Bunda bir tugma bosilganda “a” dastur, ikkinchi tugma bosilganda “b” dastur ishga tushishi kerak. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
23. Aqlli klavyatura loyihasi uchun maxsus buyruqlarni kompyuterga uzatuvchi tugmalardan foydalanish ko’zda tutilmoqda. Bunda bir tugma bosilganda “a” dastur, ikkinchi tugma bosilganda “b” dastur ishga tushishi kerak. Bundan tashqari dasturlar ishga tushgani haqida klavyaturaga maxsus xabar kelishi aks xolda buyruqlar takror uzatilishi kerak. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
№9 va№10 . O‘rnatilgan ma’lumot uzatish tizimini loyihalash
Ishdan maqsad: Arduino platasi yordamida ma’lumot uzatish tizimlarini loyihalash.
Arduino IDE muhitidagi o‘zgaruvchilar.O‘zgaruvchi – bu ma’lumotlarni saqlash joyi . U nom, qiymat va turga ega. Masalan , keltirilgan e’lon deklaratsiya deyiladi:
int pin = 13;
o‘zgaruvchini pin nomi bilan yaratadi, 13 qiymat bilan va int turli. Keyinchalik ushbu o‘zgaruvchiga uning nomi bilan murojaat etish mumkin. Masalan:
pinMode(pin, OUTPUT);
(13) chiqish qiymati pinMode() funksiyasiga uzatiladi.Ushbu holatda o‘zgaruvchidan foydalanish shart emas. Tasdiq quyidagi ko‘rinishda bo‘ladi:
pinMode(13, OUTPUT);
9.1- rasm. Marial mode muhiti/
Bir o‘zgaruvchi qiymatini boshqa o‘zgaruvchi qiymatiga o‘zlashtirishda nusxa olish jarayoni bajariladi, ular o‘zaro ta’sir qilmaydi.
Masalan:
int pin = 13;
int pin2 = pin;
pin = 12;
ushbu holatda pin faqat 12, pin2 esa 13ga teng bo‘ladi.
9.2- rasm. Arduino Builder muhiti.
Serial.begin() funksiyasi ketma ket ulanishni amalga oshirib ma’lumot uzatish tezligini bit/c (bod) beradi. Kompyuter bilan ma’lumot almashishi uchun quyidagi qiymatlarni berish kerak: 300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600 yoki 115200.
Sintaksis
|
|
Parametrlar
· speed: tezlik bit/c (bod). (long)
Misol
|
|
|
|
|
|
|
|
|
|
kiritish/chiqarish portlari:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Serial.read() funksiyasi
Sintaksis
Serial.read()
Parametrlari
yo‘q
Qaytarilayotgan qiymatlar
Bayt yoki -1 agar yo‘q bo‘lsa (int)
Misol
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|||
|
|
|||
|
|
|||
|
|
|
|
|
|
|
|
|
|
Funksiya Serial.print() – ma’lumotlarni ketma-ket port orqali ASCII ko‘rinishda uzatishda foydalaniladi.
Nazorat savollari
Serial.print(78) - "78" ko‘rinishida uzatiladi
Serial.print(1.23456) -"1.23" ko‘rinishida uzatiladi
Serial.print(byte(78)) - "N" ko‘rinishida uzatiladi
Serial.print('N') -"N" ko‘rinishida uzatiladi
Serial.print("Hello world.") - "Hello world." ko‘rinishida uzatiladi
Variantlar
1. Aqlli klavyatura loyihasi uchun maxsus buyruqlarni kompyuterga uzatuvchi tugmalardan foydalanish ko’zda tutilmoqda. Bunda bir tugma bosilganda “a” dastur, ikkinchi tugma bosilganda “b” dastur ishga tushishi kerak. Bundan tashqari dasturlar ishga tushgani haqida klavyaturaga maxsus xabar kelishi aks xolda buyruqlar takror uzatilishi kerak. Har bir tugma uchun ikkitadan yorug’lik diodlaridan foydalanish ham nazarda tutilgan. Ular buyruqlar jo’natilgan va javob kelganda ishga tushishi kerak.AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
2. Aqlli isitgich loyihasi uchun haroratni nazorat qilishda termoparalardan foydalanilmoqda. Termopara atrofdagi haroratni o’lchashi kerak. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
3. Aqlli isitgich loyihasi uchun haroratni nazorat qilishda termoparalardan foydalanilmoqda. Termopara atrofdagi haroratni o’lchashi kerak. Harorat kerakli darajadan oshganda isitish vositasi avtomatik o’chiriladi. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
4. Aqlli isitgich loyihasi uchun haroratni nazorat qilishda termoparalardan foydalanilmoqda. Termopara atrofdagi haroratni o’lchashi kerak. Harorat kerakli darajadan oshganda isitish vositasi avtomatik tarzda o’chiriladi. Harorat quyi darajada bo’lganda esa ishga tushishi kerak. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
5. Ma’lumki tugma bosilganda inson qo’li titrashi hisobiga ulab-uzilishlar qayta qayta amalga oshadi. Natijada mikrokontroller bir funksiyani takror bajaradi. Bu esa tasodifiy xatoliklarni keltirib chiqarishi mumkin. Buni oldini olish uchun taymer yoki bosh siklda qanday dasturiy yechim ishlab chiqish mumkin? AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
6. Ma’lumki tugma bosilganda inson qo’li titrashi hisobiga ulab-uzilishlar qayta qayta amalga oshadi. Natijada mikrokontroller bir funksiyani takror bajaradi. Bu esa tasodifiy xatoliklarni keltirib chiqarishi mumkin. Buni oldini olish uchun uzilishlarga ishlov berish orqali qanday dasturiy yechim ishlab chiqish mumkin? AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
7. Ma’lumki tugma bosilganda inson qo’li titrashi hisobiga ulab-uzilishlar qayta qayta amalga oshadi. Natijada mikrokontroller bir funksiyani takror bajaradi. Bu esa tasodifiy xatoliklarni keltirib chiqarishi mumkin. Buni oldini olish uchun qanday apparat yechim ishlab chiqish mumkin?
8. Har bir 500ms interval bilan ketma-ket yoqib o’chiriluvchi 8ta yorug’lik diodlari uchun AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida bosh siklda dastur fragmentini tuzing.
9. Har bir 500ms interval bilan ketma-ket yoqib o’chiriluvchi 8ta yorug’lik diodlari uchun AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida taymerda dastur fragmentini tuzing.
10. Har bir 500ms interval bilan ketma-ket yoqib o’chiriluvchi 16 ta yorug’lik diodlari uchun AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida taymerda dastur fragmentini tuzing.
11. Quyoshning yoritishiga ko’ra kun vaqtini taxminan aniqlovchi qurilma ustida ish olib borilmoqda. Buning uchun yorug’lik darajasini aniqlashda 1ta fotorezistordan foydalanilmoqda. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
12. Quyoshning yoritishiga ko’ra kun vaqtini taxminan aniqlovchi qurilma ustida ish olib borilmoqda. Buning uchun yorug’lik darajasini aniqlashda 2ta bir – biri nisbatan 1800 burchak ostidagi fotorezistorlardan foydalanilmoqda. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
13. Quyoshning yoritishiga ko’ra kun vaqtini taxminan aniqlovchi qurilma ustida ish olib borilmoqda. Buning uchun yorug’lik darajasini aniqlashda 4ta bir – biri nisbatan 900 burchak ostidagi fotorezistorlardan foydalanilmoqda. AVR ATmega oilasiga mansub bo'lgan mikrokontroller asosida dastur fragmentini tuzing.
14. Yuqori haroratli ekspuatatsiya sharoitida qo’llash uchun mikrokontroller asosida qurilmalar yaratilmoqda. Ammo MCU yuqoriga haroratda o’z funksional vazifasini belgilangan tartibda bajara olmaydi. Shuning uchun kristaldagi haroratni o’lchovchi va o’rnatilgan kritik 850Cdan ko’tarilganda signalizatsiya ishga tushadigan dastur fragmentini yozing.
15. Yuqori haroratli ekspuatatsiya sharoitida qo’llash uchun mikrokontroller asosida qurilmalar yaratilmoqda. Ammo MCU yuqoriga haroratda o’z funksional vazifasini belgilangan tartibda bajara olmaydi. Shuning uchun kristaldagi haroratni o’lchovchi va o’rnatilgan 400Cdan ko’tarilganda sovutish parraglarini ishga tushuruvchi hamda kritik 850Cdan ko’tarilganda signalizatsiya ishga tushadigan dastur fragmentini yozing.
16. Yuqori haroratli ekspuatatsiya sharoitida qo’llash uchun mikrokontroller asosida qurilmalar yaratilmoqda. Ammo MCU yuqoriga haroratda o’z funksional vazifasini belgilangan tartibda bajara olmaydi. Shuning uchun kristaldagi haroratni o’lchovchi va o’rnatilgan 400Cdan ko’tarilganda sovutish parraglarini,600Cdan ko’tarilganda ikkinchi parraglarini ishga tushuruvchi, shuningdek, 850Cdan ko’tarilganda signalizatsiya ishga tushadigan dastur fragmentini yozing.
№11va №12 . O‘rnatilgan ma’lumot uzatish tizimini loyihalash
Ishdan maqsad : Oddiy Arduino platasiga kompyuter COM-porti asosida oddiy elektrodvigatelni boshqaruv pulti asosida boshqarish.
Servomotorni ulash.Servomotor – alohida manba talab qiladi, elektrik energiya elektromagnit maydon hisobiga mexanik ko‘rinishga o‘zgartiriladi va dvigatel mexanik harakat ishlab chiqishi kerak.
Ulanish sxemasi quyidagi ko‘rinishda bo‘ladi:
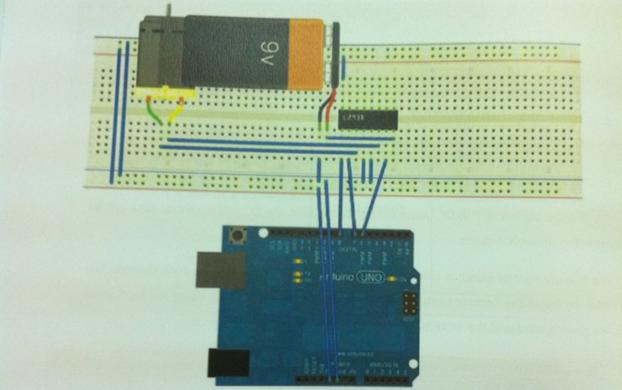
11.1-rasm. Servomotorni ulash
Kerak bo‘ladigan jihozlar: elektrodvigatel, doimiy tok elektr manba’li 9 volt, mikrosxema L293D – dvigatel drayveri va Arduino platasi.
Ish bajarilish jarayonida Arduino raqamli pinlarini drayverni mos oyoqchalariga ulash kerak.
|
|
Drayver L293D |
Port Arduino |
Elektrodvigatel |
Pitanie 9V |
|
EN |
1 |
8 |
|
|
|
IN1 |
2 |
7 |
|
|
|
OUT1 |
3 |
|
Krasnыy |
|
|
GND |
4 |
GND |
|
|
|
GND |
5 |
GND |
|
|
|
OUT2 |
6 |
|
Chyornыy |
|
|
IN2 |
7 |
6 |
|
|
|
+Vmotor |
8 |
|
|
+ |
|
+V |
16 |
|
|
|
Prinsipial sxemasi quyidagicha:
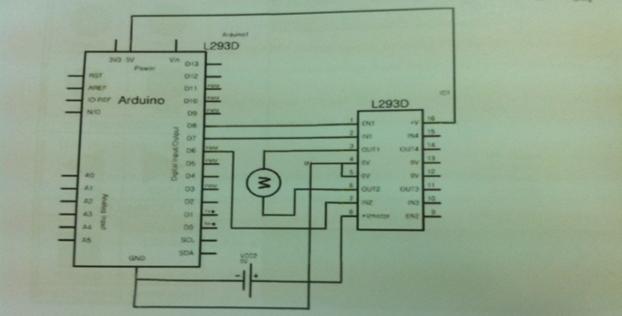
11.2- rasm. Prinsipial sxemasi
Model ko‘rinishi:
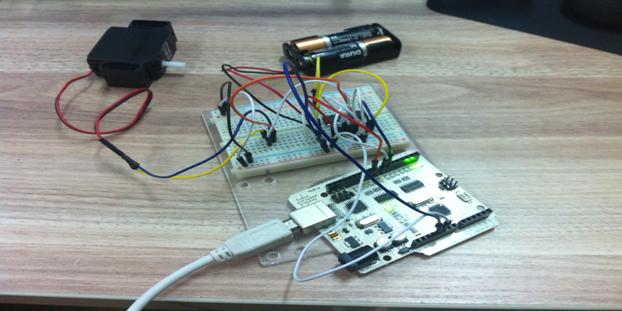
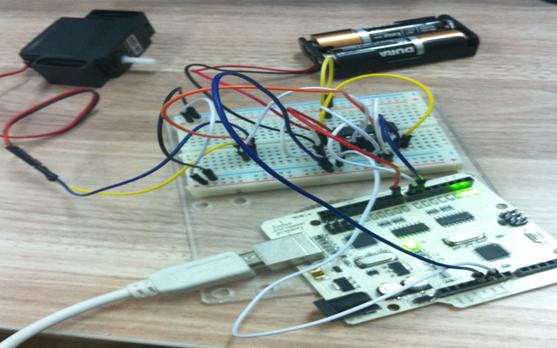
12.1- rasm. Model ko’rinishi.
Boshqarish pulti – Remote_Control_Switch.Xarakatni boshqarish uchun sketch Remote Control Switch foydalaniladi, u esa o‘z navbatida maxsus buyruqlarni COM-portga uzatadi

12.2- rasm. Boshqarish pulti.
Uzatilgan simvollar to‘plami mos svetodiodlarni boshqaradi.
Maxsus simvollarni uzatamiz, ushbu simvol «H» - header boshlanadi. Keyingi simvol – D – DC motor tag, doimiy tokdagi elektrodvigatel
Keyingi raqam – bu chapga va o‘nga harakat «1» - yoqish va «0» - harakatni o‘chirish(Jadval ):
|
Yo‘nalish |
Yoqish
|
O‘chirish |
|
Chapga |
HD0101 |
HD0100 |
|
O‘nga |
HD0001 |
HD0000 |
Dasturiy qismda klass Si – Serial dan foydalanilgan:
§ Serial.begin – Seriyali port (COM-port);
§ Serial.print – Ma’lumotlarni Arduino dan kompyuterga uzatish va monitor portiga uzatish;
§ Serial.read – Kompyuterdan Arduino platasi orqali o‘qish (masalan : «10110» qatorini o‘qish).
Serial funksiyasi Arduinoni kompyuter yoki boshqa qurilmalr bilan aloqasini tiklaydi va ular ketma-ket ma’lumot almashishni qo‘llaydi. Barcha Arduino platalari hech bo‘lmaganda 1 ta ketma ket portga ega (UART, ba’zida USART deb nomlashadi). Serial bilan ma’lumot almashish uchun raqamli portlardan foydalaniladi va k\ch portlari 0 (RX) va 1 (TX), USB port.
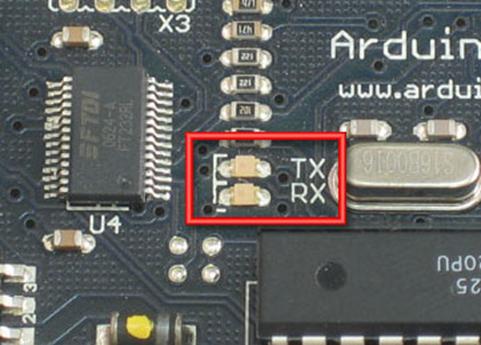

12.3- rasm. Arduino portlari.
Elektromotor L293D drayveri.L293D elektrodvigatelni boshqarish uchun ikkita drayverga ega. Boshqaruv kirishlari uchun ikki juft kirishlar va elektromotorga ulash uchun ikki juft chiqishlar mavjud. Undan tashqari L293D da yana ikkita kirish drayverlarni ulash uchun kirish bo‘lib xizmat qiladi. Ushbu kirishlar elektromotor aylanish tezligini boshqarish uchun foydalaniladi (PWM).
12.4- arsm. Elektromotor L293D
OUTPUT1 va OUTPUT2 chiqishlariga elektromotor MOTOR1 ulanadi ( mikrosxema uchun DIP-korpusda – 3 va 6 oyoqchalar). MOTOR2 chiqishlar OUTPUT3 va OUTPUT4 ga ulangan ( 11 va 14 oyoqchalari). ENABLE1(2)ga uzatilayotgan signallar mos drayverlarni boshqaradi (1 va 9).
ENABLE1 kirishiga signal HIGH berish bilan – 1-motorni drayveri yoqiladi.
Agar INPUT1 va INPUT2 kirishlariga signal berilmasa, u holda motor aylanmaydi.
HIGH ni INPUT1 va LOW , INPUT2 signal berish natijasida motorni aylanishga majbur qilamiz. Agar signallarni joyini almashtirish natijasida INPUT1 ga signal LOW ni, INPUT2 ga signal HIGH –berish natijasida motor teskari yo‘nalishda aylana boshlaydi.
Chiqish Vss ( 16) –mikrosxema manbaasiga javob beradi, chiqish Vs ( 8) motor manbaaga ulanishiga javob beradi.
4 ta kontakt GND ( 4, 5, 12,13) yerga ulanishi kerak.
L293D xarakteristikasi
Dvigatel
kuch manbai (Vs)
4,5 dan 36V gacha
Mikrosxema kuch
manbai (Vss)
5V
ruxsat etilgan tok yuklamasi
600mA (xar bir kanalga)
chiqishdagi
maksimal tok
1,2A (xar bir kanalga)
kirish
kuchlanishi mantiqiy "0" 1,5V gacha
kirish
kuchlanishi mantiqiy "1" 2,3...7V
o‘chirib yoqish
tezligi
5 kGs gacha.
12.5- rasm. Umumiy sxemasi
Programma kodi
const char HEADER = 'H';
const int TOTAL_BYTES = 5;
const char DC_MOTOR_TAG = 'D';
const int MOTOR_LEFT = 1;
const int MOTOR_RIGHT = 0;
const int ON = 1;
const int OFF = 0;
const int motor_enable_pin = 8;
const int motor_control_pin0 = 7;
const int motor_control_pin1 = 6;
void setup()
{
Serial.begin(9600);
pinMode(motor_enable_pin, OUTPUT);
pinMode(motor_control_pin0, OUTPUT);
pinMode(motor_control_pin1, OUTPUT);
digitalWrite(motor_enable_pin, LOW);
digitalWrite(motor_control_pin0, LOW);
digitalWrite(motor_control_pin1, LOW);
}
void loop()
{
if(Serial.available()>TOTAL_BYTES)
{
if(Serial.read()==HEADER)
{
char tag = Serial.read();
if(tag==DC_MOTOR_TAG)
{
int motor_dir=(Serial.read() - 48)*256;
motor_dir=motor_dir+(Serial.read() - 48);
int motor_button=(Serial.read() - 48)*256;
motor_button=motor_button+(Serial.read() - 48);
Serial.print("motor_dir: ");
Serial.println(motor_dir);
if(motor_button==ON)
{
digitalWrite(motor_enable_pin, HIGH);
if(motor_dir==MOTOR_LEFT)
{
Serial.println("Turn left!!!");
digitalWrite(motor_control_pin0, HIGH);
digitalWrite(motor_control_pin1, LOW);
}
if(motor_dir ==MOTOR_RIGHT)
{
Serial.println("Turn right!!!");
digitalWrite(motor_control_pin0, LOW);
digitalWrite(motor_control_pin1, HIGH);
}
}
else
{
digitalWrite(motor_enable_pin, LOW);
digitalWrite(motor_control_pin0, LOW);
digitalWrite(motor_control_pin1, LOW);
}
}
}
}
delay(100);
}
Variantlar.
1.Mikrokontrollerportlarinichiqarishfunksiyasigao'tkazishvaregistrdagiharbirbitniketma-ketmantiqiy "bir" va "nol" holatigakeltirish.
Dasturlashmuhiti: CodeVisionAVR
Sinovplatasi:ATMEGA16BOOTLOADER
Mikrokontroller : Atmel AVRATMEGA16
Dasturlistingi:
|
1. Harbirbitgaqiymatberishorqali |
2. Registr "siljish" amaliorqali |
|
#include <mega16a.h> #include <delay.h>
void main(void) { PORTB=0x00; DDRB=0xFF; //PORTB - "chiqarish" rejimida
PORTC=0x00; DDRC=0x00;
PORTD=0x00; DDRD=0x00;
while (1) { PORTB=0b00000001; delay_ms(100); PORTB=0b00000010; delay_ms(100); PORTB=0b00000100; delay_ms(100); PORTB=0b00001000; delay_ms(100); PORTB=0b00010000; delay_ms(100); PORTB=0b00100000; delay_ms(100); PORTB=0b01000000; delay_ms(100); PORTB=0b10000000; delay_ms(100); } } |
#include <mega16a.h> #include <delay.h>
void main(void) { unsigned char i=0x01;
PORTB=0x00; DDRB=0xFF; //PORTB - "chiqarish" rejimida
PORTC=0x00; DDRC=0x00;
PORTD=0x00; DDRD=0x00;
while (1) {
PORTB=i; i<<=1; if (i==0) i=0x01; delay_ms(100); } } |
2. Mikrokontrollerportlarinikirishfunksiyasigao'tkazishvaregistrdagiharbir bit holatinio'qish.
Dasturlashmuhiti: CodeVisionAVR
Sinovplatasi:ATMEGA16BOOTLOADER
Mikrokontroller : Atmel AVRATMEGA16
Dasturlistingi:
|
1. Harbir bit qiymatinitekshirishorqali |
|
#include <mega16a.h> #include <delay.h> void main(void) { PORTB=0x00; DDRB=0xFF; // PORTB "chiqish" rejimida
PORTC=0x00; DDRC=0x00;
PORTD=0x00; DDRD=0x00; //PORTD "kiritish" rejimida
while (1) { if (PIND.0==0) {PORTB.0=1;}; //0 - bit mantiqiy "0" bo'lsa if (PIND.1==0) {PORTB.1=1;}; //1 - bit mantiqiy "0" bo'lsa if (PIND.2==0) {PORTB.2=1;}; //2 - bit mantiqiy "0" bo'lsa if (PIND.3==0) {PORTB.3=1;}; //3 - bit mantiqiy "0" bo'lsa if (PIND.4==0) {PORTB.4=1;}; //4 - bit mantiqiy "0" bo'lsa if (PIND.5==0) {PORTB.5=1;}; //5 - bit mantiqiy "0" bo'lsa if (PIND.6==0) {PORTB.6=1;}; //6 - bit mantiqiy "0" bo'lsa if (PIND.7==0) {PORTB.7=1;}; //7 - bit mantiqiy "0" bo'lsa delay_ms(100); } } |
3. Mikrokontrollerasosidayoritgichlarnitugmalaryordamidaboshqarish
Mikrokontrollerportlaridanbirikirishboshqasichiqarishfunksiyasigao'tkazishtugmalarholatigaqarabchiroqlarningbirqismini, qolganqisminivato'liqishgatushirish, o'chirish.
Dasturlashmuhiti: CodeVisionAVR
Sinovplatasi:ATMEGA16BOOTLOADER
Mikrokontroller : Atmel AVRATMEGA16
Dasturlistingi:
|
Harbir bit qiymatinitekshirishorqali |
|
#include <mega16a.h> #include <delay.h>
void main(void) {
PORTB=0x00; DDRB=0xFF; // PORTB "chiqish" rejimida
PORTC=0x00; DDRC=0x00;
PORTD=0b00001111; // PORTD 0,1,2,3 - pin.largaichkiresiztorniulash DDRD=0x00; //PORTD "kiritish" rejimida
while (1) {
if (PIND.0==0) {PORTB=0b00001111;}; //1-tugmabosilganbo'lsa if (PIND.1==0) {PORTB=0b11110000;}; //2-tugmabosilganbo'lsa if (PIND.2==0) {PORTB=0b11111111;}; //3-tugmabosilganbo'lsa if (PIND.3==0) {PORTB=0b00000000;}; //4-tugmabosilganbo'lsa
delay_ms(100); } } |
FOYDALANILGAN ADABIYOTLAR RO’YXATI
1. K.G. Jukov. Modelnoe proektirovanie vstraivaemыx sistem v LabVIEW.Izdatelstvo: DMK Press, 2011 g, - 688 s.
2. P. Raghavan, Amol Lad, Sriram Neelakandan. Embedded Linux System Design and Development. Izdatelstvo: AUERBACH, 2005 g, - 432 s.
3. Peter Marwedel. Embedded System Design. 2005 – 264 s.
4. Haliman,Christopher/Embedde Linux primer:a practical real-world approach/p.cm/ISBN 978-0-13-701783-6
5. Russinovich M.,Solomon D. Vnutrennee ustoystvo Microsoft Windows/6-ye izd.-SPb.: Piter,2013-800s.il-(Seriya «Master-klass»)
6. Russinovich M.,Solomon D. Vnutrennee ustoystvo Microsoft Windows/6-ye izd.-SPb.: Piter,2013-800s.il-(Seriya «Master-klass»)
7. Amirsaidov U.B, Abasxonova X.Yu Mikroprosessorlar/ Oliy o’quv yurtlari uchun o’quv qo’llanma: Toshkent 2016q -350b
V. KEYSLAR BANKI
Mikroprotsessorlar va mikrokontrolleralr dasturiy ta’minoti.
Berilgan keys-stadining maqsadi: Tinglovchilarda mikrootsessor tizimlarida qo‘llaniladigan uslublari bo‘yicha bilim va ko‘nikmalarni rivojlantirish, o‘tilgan mavzular bo‘yicha egallangan bilimlarini tekshirib ko‘rishdan iborat.
Kutilayotgan natijalar: O‘rganilayotgan mavzu bo‘yicha amaliy ko‘nikmalarga ega bo‘ladi; dasturlash tili va uning turlarini o‘rganadi va tahlil qiladi; muammolarni yechish uchun siqish algoritmlarining qiyosiy tahlilini o‘tkazadi; mikroprotsessorlarda qo‘llaniladigan algoritmlarining asoslarini o‘rganadi; har bir faoliyat turi bo‘yicha tavsiyalar ishlab chiqish ko‘nikmalari shakllanadi.
Keys-stadini muvaffaqiyatli bajarish uchun tinglovchi quyidagi bilimlarga ega bo‘lishi lozim:
Tinglovchi bilishi kerak: diskret matematika raqamli mantiqiy qurilmalarni loyixalash fanlaridan chuqur bilimlarga; dastuash algoritmlarining qiyosiy tahlili; mikroprotsessorda qo‘llaniladigan dasturiy qurilmalarni farqi va asoslari.
Tinglovchi amalga oshirishi kerak: mavzuni mustaqil o‘rganadi; muammoning mohiyatini aniqlashtiradi; g‘oyalarni ilgari suradi; ma’lumotlarni tanqidiy nuqtai nazardan ko‘rib chiqib, mustaqil qaror qabul qilishni o‘rganadi; o‘z nuqtai nazariga ega bo‘lib, mantiqiy xulosa chiqaradi; ma’lumotlarni taqqoslaydi, tahlil qiladi va umumlashtiradi;
Keys-stadida real vaziyat bayon qilingan. Keys-stadining ob’ekti – mikroprotsessorda qo‘llaniladigan dasturiy ta’minot, ularni qulmaga yuklash , tuzilishi kabi parametrlarni hisobga olgan holda ularning algoritmlari.
Keys-stadida ishlatilgan ma’lumotlar manbai: mikroprotsessor tizimlaridaga dasturiy boshqariladigan qurilmalarda keladigan muammolar asosida olingan ma’lumotlar asosida ishlab chiqilgan.
Keys-stadining tipologik xususiyatlariga ko‘ra xarakteristikasi: mazkur keys-stadi kabinetli keys-stadi toifasiga kirib, syujetsiz hisoblanadi. Keys-stadi muammolarni taqdim qilishga, ularni hal etishga hamda tahlil qilishga qaratilgan.
Bu tashkiliy-institutsional keys-stadi, tahliliy yozishma ko‘rinishida tuzilgan.f
U tuzilmalanmagan, qisqa hajmdagi keys-stadi – texnologiya hisoblanadi. O‘quv topshirig‘ini taqdim etish usuli bo‘yicha – keys-stadi topshiriq.
Didaktik maqsadlarga ko‘ra treningli keys-stadi hisoblanadi, shuningdek bu keys-stadi amaliy mashg‘uloti davomida belgilangan mavzu bo‘yicha olingan bilimlarni mustahkamlashga mo‘ljallangan. Ushbu keys-stadi OTM Tinglovchilari uchun “Mikroprotsessor” fanida foydalanilishi mumkin.
Keys-stadi: Dasturiy boshqariladigan mikroprotsessor tizimlarini yaratish usullari
Dasturiy boshqariladigan qurilmalarning tahlili shuni ko‘rsatadiki, ularni quyidagi sinflarga bo‘lish mumkin:
1) dasturlash tillari;
2) dasturiy muxit;
3) qurilmaga yuklash jarayonlari;
4) qurilma qurish jarayonlari;
5)qurilmani boshqarish jarayonlari.
Keysdagi asosiy muammo mikroprotsessorda qo‘llaniladigan dasturlash uslublarining qo‘llanilish sohasiga qarab eng maqbul (optimal) variantlarini ishlab chiqishga qaratilgan.
Savollar:
1. Sizningcha ushbu holatda muammo mavjudmi va agar bor bo‘lsa u qanday muammo?
2. Ushbu vaziyatda muammoni qayd etuvchi qanday isbot-dalillarni keltira olasiz?
3. Dasturlash jarayonlari
4. Muallifning yechimi sizni qoniqtiradimi?
5. Bunday vaziyatda siz muammoni qanday bartaraf etgan bo‘lar edingiz?
Amaliy vaziyatni bosqichma – bosqich tahlil qilish va hal etish bo‘yicha tinglovchiga metodik ko‘rsatmalar
Keys-stadini yechish bo‘yicha individual ish yo‘riqnomasi
1. Avvalo, keys-stadi bilan tanishing. Muammoli vaziyat haqida tushuncha hosil qilish uchun bor bo‘lgan butun axborotni diqqat bilan o‘qib chiqing. O‘qish paytida vaziyatni tahlil qilishga harakat qiling.
2. Birinchi savolga javob bering.
3. Ma’lumotlarni yana bir marotaba diqqat bilan o‘qib chiqing. Siz uchun muhim bo‘lgan satrlarni quyidagi harflar yordamida belgilang:
“D” harfi – muammoni tasdiqlovchi dalillar,
“S” harfi – muammo sabablarini,
“O.O.Y.” harflari – muammoni oldini olish yo‘llari.
4. Ushbu belgilar 2,3,4 savollarga yechim topishga yordam beradi.
5. Yana bir bor savollarga javob berishga harakat qiling.
Guruhlarda keys-stadini yechish bo‘yicha yo‘riqnoma.
1. Individual yechilgan keys-stadi vaziyatlar bilan tanishib chiqing.
2. Guruh sardorini tanlang.
3. Vatman qog‘ozlarda quyidagi jadvalni chizing.
Muammoni tahlil qilish va yechish jadvali
|
Muammoni tasdiqlovchi dalillari |
Muammoni kelib chiqish sabablari |
Muallif tomonidan taklif qilingan yechim |
Guruh yechimi |
|
|
|
|
|
Ishni yakunlab, taqdimotga tayyorlang.
Auditoriyadan tashqari bajarilgan ish uchun baholash mezonlari va ko‘rsatkichlari
|
Tinglovchilar ro‘yxati |
Asosiy muammo ajratib olinib, tadqiqot ob’ekti aniqlangan maks. 6 b |
Muammoli vaziyatning kelib chiqish sababi va dalillari aniq ko‘rsatilgan maks. 4 b |
Vaziyatdan chiqib ketish harakatlari aniq ko‘rsa- tilgan maks. 10 b |
Jami maks. 20 b |
|
|
|
|
|
|
Auditoriyada bajarilgan ish uchun baholash mezonlari va ko‘rsatkichlari
|
Guruhlar ro‘yxati |
Guruh faol
maks. 1 b |
Ma’lumotlar ko‘rgazmali taqdim etildi maks. 4 b |
Javoblar to‘liq va aniq berildi
maks. 5 b |
Jami
maks. 10 b |
|
1. |
|
|
|
|
|
2. |
|
|
|
|
8-10 ball – “a’lo”, 6-8 ball – “yaxshi”, 4-6 ball – “qoniqarli”, 0-4 ball – “qoniqarsiz”.
IV. O‘qituvchi tomonidan keys-stadini yechish va tahlil qilish varianti
Keys-stadidagi asosiy muammo: Keysdagi asosiy muammo raqamli televidenieda qo‘llaniladigan siqish uslublarining qo‘llanilish sohasiga qarab eng maqbul (optimal) variantlarini ishlab chiqishga qaratilgan.
Muammoni tasdiqlovchi dalillar: Muammoli vaziyatni tahlil qilishga harakat qilamiz. Qo‘llanilish sohasiga ko‘ra mikroprotsessorda dasturlash jarayonlari algoritmlarini aniqlaymiz.
· Assembler dasturiy ta’minoti;
· S dasturiy ta’minoti ;
· S++ dasturiy ta’minoti;
· Java dasturiy ta’minoti.
Muammoli vaziyatning kelib chiqish sabablari: Mikroprotsessor tizimlarini loyixalashtirishda yuzagakeladigan muammolarda turli xil dasturiy muxitlarning turlichaligidadir. Xar bir muxit o‘z dasturiy tillariga va ularning interfeysiga bog‘liq.
Muallif o‘z taklifida muammoni oldini olishda quyidagi yo‘llarini ko‘rsatib bergan:
Birinchi navbatda dasturiy muxitlarning farqi va ularni mikroprotsessor tizimlarini yaratishdagi muammolarini bartaraf etilishi va tanlanishi.Yaratilgan dasturni tizimga qo‘llay olinishi.
TATU Telekommunikatsiyada boshqaruv tizimlarining apparat va dasturiy ta’minoti kafedrasida mazkur muammoli vaziyatni hal qilish chora tadbirlari sifatida maxsus virtual laboratoriya ishlari yaratilgan. Ya’ni tinglovchilarga kalendar reja asosida ushbu laboratoriya mashg‘ulotlari muntazam ravishda olib borilmoqda.
Mazkur vaziyatdan kelib chiqib, olib boriladigan muntazam izlanishlar va tadqiqotlar natijasi o‘laroq tasvir signallarini siqishda Veyvlet o‘zgartirish (VO‘) usuli eng optimali ekanligi aniqlandi.
Yakuniy xulosa
Muammoning yechimi: Mikroprotsessor tizimlarini yaratishda ishlashga qulay bo‘lgan dasturlash tili va muxitlari ko‘p bo‘lganligi sababali vaqt kerak bo‘ldai. Shu sababli lay muxit tanlanierak bo‘ldai..
Keys-stadi o‘qitish texnologiyasi
O‘quv mashg‘ulotining texnologiyasi modeli
|
Mashg‘ulot vaqti-2 soat |
Tinglovchilar soni: 25 –30 ta gacha |
|
Mashg‘ulot shakli va turi |
Amaliy-bilimlarni mustahkamlash va ko‘nikma va malakalarni shakllantirish bo‘yicha amaliy mashg‘ulot |
|
O‘quv mashg‘ulot rejasi |
1. Tinglovchilar bilimlarini faollashtirish maqsadida blis - so‘rov o‘tkazish. 2.Keys-stadi mazmuniga kirish. Muammoni va uni yechish vazifalarini aniq ifoda etish. 3.Keys-stadini guruhlarda yechish. 4. Natijalar taqdimoti va muhokamasini o‘tkazish. 5.Yakuniy xulosa chiqarish. Erishilgan o‘quv natijalariga ko‘ra Tinglovchilar faoliyatini baholash |
|
O‘quv mashg‘ulotining maqsadi: Mikrprotsessor tizimlarini yaratish. |
|
|
Pedagogik vazifalar: - keys-stadi vaziyati bilan tanishtirish, muammoni va uni yechish vazifalarini ajratishni o‘rgatish; - muammoni yechish bo‘yicha harakatlar algoritmini tushuntirish; - siqish algoritmlarini qiyosiy tahlil etishni tushuntirish. - raqamli televidenieda eng optimal variantni tanlashni o‘rgatish - mantiqiy xulosa chiqarishga ko‘mak berish |
O‘quv faoliyatining natijalari: - keys-stadi mazmuni bilan oldindan tanishib chiqib, yozma tayyorgarlik ko‘radi; - vaziyatga qarab muammoni va uni yechish bo‘yicha vazifalarni ta’riflaydi; - muammoni yechish bo‘yicha aniq vaziyatlarning ketma – ketligini aniqlaydi: - siqish algoritm turlarini o‘rganadi; - ularni qiyosiy tahlil qila oladi; - raqamli televidenie uchun modulyatsiyaning optimal variantini tanlaydi; - muammoli vazifalarni yechishda nazariy bilimlarini qo‘llaydi; - muammoni aniqlab, uni hal qilishda yechim topadi; - yakuniy mantiqiy xulosalar chiqaradi. |
|
O‘qitish metodlari |
Keys-stadi, aqliy hujum, insert, munozara, amaliy usul |
|
O‘quv faoliyatini tashkil etish shakllari |
O‘quv materiali, tinglovchiga uslubiy ko‘rsatmalar, taqdimot, flipchart |
|
O‘qitish vositalari |
Individual, frontal, jamoa, guruhlarda ishlash |
|
O‘qitish sharoiti |
Guruhlarda ishlashga mo‘ljallangan, auditoriya |
|
Qaytar aloqaning yo‘l va vositalari |
Blis-so‘rov, taqdimot, kuzatuv |
1-ilova
Blis-so‘rov savol va javoblari
|
№ |
Savol |
Javob |
|
1. |
Mikroprotsessor turlari.....? |
Mikroprotsessor razryadlar soni. |
|
2. |
Dasturlash turlari |
1) assembler dasturlash tili; 2) S dasturlash tillari; . |
|
3. |
Dasturiy muxitlar |
· AVR studio ; · Cod vision AVR;
|
VI. MUSTAQIL TA’LIM MAVZULARI
Mustaqil ishni tashkil etishning shakli va mazmuni
Tinglovchi mustaqil ishni muayyan modulning xususiyatlarini hisobga olgan holda quyidagi shakllardan foydalanib tayyorlashi tavsiya etiladi:
- me’yoriy xujjatlardan, o‘quv va ilmiy adabiyotlardan foydalanish asosida modul mavzularini o‘rganish;
- tarqatma materiallar bo‘yicha ma’ruzalar qismini o‘zlashtirish;
- avtomatlashtirilgan o‘rgatuvchi va nazorat qiluvchi dasturlar bilan ishlash;
- maxsus adabiyotlar bo‘yicha modul bo‘limlari yoki mavzulari ustida ishlash;
-tinglovchining kasbiy faoliyati bilan bog‘liq bo‘lgan modul bo‘limlari va mavzularni chuqur o‘rganish.
Tavsiya etilayotgan mustaqil ta’lim mavzulari:
· Raqamli qurilmalarni vizual muhitlarda loyihalash.
· Mikroprotsessorlar asosida boshqaruv qurilmalarini yasash.
· Mikrokontrollerlar asosida boshqaruv qurilmalarini yasash.
· Mikroprotsessorlar asosida o‘lchov qurilmalarini yasash.
· Turli interfeyslar orqali aloqa qiluvchi qurilmalarni yasash.
· Mikrokontrollerlar asosida “aqqli” qurilmalarni loyihalash va yasash.
· Ob’ektlarni monitoring qilish tizimlarini loyihalash.
· Qurilmalarni monitoring qilish tizimlarini loyihalash.
· Energiyani avtomatik monitoring qilish tizimlarini loyihalash.
· Qurilmalarni testlash.
· Mikroprotsessorlar asosida ma’lumot uzatish tizimlarini loyihalash.
· Mikrokontrollerlar asosida ma’lumot uzatish tizimlarini loyihalash.
VII. GLOSSARIY
|
Termin |
O‘zbek tilidagi sharhi |
Ingliz tilidagi sharhi |
|
ASI |
Asinxron seriyali interfeys |
Asynchronous Serial Interface or ASI, is a streaming data format which often carries an MPEG Transport Stream (MPEG-TS). |
|
ADC |
Analog raqamli o‘zgartirgich. Signalni raqamli holatga o‘tkazuvchi qurilma |
analog-to-digital converter (device converting an analog voltage into a binary number). |
|
ADSL |
Asimmetrik raqamli abonent liniyasi (keng polosali aloqa tarmog‘i bo‘lib 20 Mb/s tezlikkacha ma’lumot uzatish qobiliyatiga ega) |
Asymmetric Digital Subscriber Line (system exploiting the high-frequency transmission capabilities of a telephone line to enable an asymmetric broadband link method (up to 20Mb/s for the downlink and 1Mb/s for the uplink with ADSL2+). |
|
COFDM |
Kanalli kodlashga mos |
COFDM is basically OFDM with error protection (coding - C), which always precedes OFDM. |
|
CI |
Umumiy interfeys |
The CI is an interface at the receiver end for a broadcaster-specific, exchangeable CA plug-in card. This interface allows scrambled programs from different broadcasters to be de-scrambled with the same hardware despite differences in CA systems. |
|
CIF |
|
|
|
CPU |
Markaziy protsessor |
Central Processing Unit |
|
CS |
Boshqaruvchi xotira qurilmasi |
Control Storage |
|
DDS |
Raqamli ma’lumotlar oqimi |
Digital Date Stream |
|
ISDN |
Integrallangan xizmatlar raqamli tarmog‘i) - Kanallar kommutatsiyasiga ega raqamli aloqa tarmoqlari turi.
|
Integrated Services Digital Network |
|
ISO |
Standartlash bo‘yicha Xalqaro tashkilot |
International Organization for Standartization |
|
ITU |
Elektroaloqa Xalqaro Ittifoqi (MSE). Bu tashkilotning vazifalaridan biri – xalqaro standart hisoblanadigan tavsiyalarni tayyorlash. |
International Telecommunication Union |
|
MMDS |
O‘ta yuqori chastotali taqsimlashning ko‘pkanalli tizimi |
Multichannel Microvave Distribution System |
|
MISC |
Minimal komandalarni terish bilan hisoblash |
Minimum Instruction Set Computing |
|
PCMCIA |
Shaxsiy kompyuter xotirasini kengaytirish vositalarining standarti |
Personal Computer Memory Card International Association |
|
PID |
Protokol identifikatsiyasi |
Protocol Identification. The PID is a 13 bit value in the TS header. It shows that a TS packet belongs to a substream of the transport stream. |
|
QAM |
Kvadratur amplitudali modulyatsiya |
Quadrature Amplitude Modulation. QAM is the modulation method used for transmitting a transport stream via cable. The channel coding is performed prior to QAM. |
VIII. ADABIYoTLAR RO‘YXATI
Maxsus adabiyotlar:
|
1. |
Mayorov S.A, Kirillov V.A, Pribluda A.A. Vvedenie v mikroEVM. L.: Mashinostroenie. Leningr. otd-nie, 1988. – 304s. |
|
2. |
Jmakin A.P. Arxitektura EVM.-SPb.: BXV-Peterburg, 2006. -320 s. |
|
3. |
Presnuxin L.N. Mikroprotsessorы: V 3 kn. Kn. 2: Sredstva sopryajeniya. Kontroliruyuщie i upravlyayuщie sistemы: Ucheb.dlyatexn. Vuzov /V.D. Verner, N.V. Vorobev, A.V. Goryachev i dr.; Pod red. L.N. Presnuxina. – Mn.: Vыsh.shk., 1987.-303 s. |
|
4. |
Maksimov N.V, Partыka T.L., Popov I.I. Arxitektura EVM i vыchislitelnыx sistem: Uchebnik. M.: FORUM: INFRA-M, 2005. 512 s. |
|
5. |
Peskova S.A., Kuzin A.V. Arxitektura EVM i vыchislitelnыx sistem: Uchebnik. M.: FORUM: INFRA-M, 2006. 352 s. |
|
6. |
Silker B.Ya. Organizatsiya EVM i sistem / B.Ya. silker, S.A. Orlov. SPb.: Piter, 2007.- 672 s. |
|
7. |
Tanenbaum E. Arxitektura kompyutera. 5-ye izd. — SPb.: Piter, 2007. — 844 s. |
|
8. |
Yunusov J.Yu., Abasxonova X.Yu. Raqamli qurilmalar va mikroprosessor tizimlari . O‘quv qo‘llanma –Toshkent, Iqtisod , 2010- 256 v. |
|
9. |
Zarubin A.A. Mikroprotsessornoe programmnoe upravleniya. Arxitektura IXA. Metodicheskie rekomendatsii k prakticheskim zanyatiyam. SPbGUT.- SPb, 2004. |
|
10. |
Kalabekov B.A. sifrovыe ustroystva i mikroprotsessornыe sistemы. –M.: Goryachaya liniya-Telekom., 2003.- 336 s. |
|
11. |
Grebeshkov A.Yu. Mikroprotsessornыe sistemы i programmnoe obespechenie v sredstvax svyazi: Ucheb.posobie.- Samara, PGUTI, 2009.-298 s. |
|
12. |
Novikov Yu.V., Skorobogatov P.K. Osnovы mikroprotsessornoy texniki.- M.: INTUIT, 2010, 440 s. |
|
13. |
Kustarev P.V. Spesializirovannыe protsessorы. Protsessorы dlya vstraivaemыx prilojeniy: Konspekt leksiy.-SPb.: SPbGIMO(TU).- 2002.- 30 s. |
|
14. |
Belov A.V. Sozdaem ustroystva na mikrokontrollerax.- SPb.: Nauka i texnika, 2007.- 304 s. |
|
15. |
Xartov V.Ya. Mikrokontrollerы AVR. Praktikum dlya nachinayuщix.- M.: MGTU im. N.E.Baumana, 2007.- 240 s. |
|
16. |
Golubsov M.S. Mikrokontrollerы AVR: ot prostogo k slojnomu.- M.: SOLON-Press, 2003.- 288 s. |
|
17. |
Vasilev A.Ye. Mikrokontrollerы. Razrabotka vstraivaemыx prilojeniy: Ucheb. Posobie. SPb: SPbGPU, 2003.- 210 s. |
|
18. |
Griщenko V.I., Ladыjenskiy, Moataz Yunis Osnovnыe napravleniya razvitiya sovremennыx setevыx protsessorov.- DonTU, Informatika, kibernetika i vыchislitelnaya texnika, №14, 2011.- s.123-127. |
|
19. |
Griщenko V.I., Ladыjenskiy Yu.V. Modelirovanie marshrutizatorov na mnogoyadernыx setevыx protsessorax.- DonTU, Informatika, kibernetika i vыchislitelnaya texnika, №12, 2010.- s.169-176. |
|
20. |
Moataz Yunis, Griщenko V.I., Ladыjenskiy Yu.V Obobщennaya arxitektura setevogo protsessora. – Inaormatika i kompyuternыe texnologii-2011. –DonTU, s.386-391. |
|
21. |
Setevыe protsessorы firmы Intel – Komponentы i texnologii, №8, 2003. |
|
22. |
Griщenko V.I., Ladыjenskiy, Moataz Yunis Perspektivnыe arxitekturы i tendensii razvitiya sovremennыx setevыx protsessorov- 4- Mejdunarodnaya nauchno-texnicheskaya konferensiya « Modelirovani i kompternaya grafika», DonTU, 2011. s-93-9. |
|
23. |
|
|
24. |
Computers as Components, Third Edition: Principles of Embedded Computing System Design. Marilyn Wolf. The Morgan Kaufmann Series... ,May 23, 2012 |
|
25. |
PIC Microcontroller. Muhammad Ali Mazidi, Rolin D. McKinlay and Danny Causey, Feb 16, 2007. |
Internet resurslar:
1. www.ZiyoNET.uz - Uzbekistan Respublikasi axborot-ta’lim portali.
3. http://www.embeddedtux.org/
4. http://www.oreilly.com/catalog/belinuxsys/
6. http://elks.sourceforge.net/,
7. http://www.ericsson.com/about/blipnet/
12. www.books-shop.com