УЗБЕКСКОЕ АГЕНСТВО СВЯЗИ И
ИНФОРМАТИЗАЦИИ
ТАШКЕНТСКИЙ УНИВЕРСИТЕТ
ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
Кафедра
ТС и СК
Методическое
указание
к
лабораторному занятию
«Синхронизация
в ЦСК»
по курсу
СИСТЕМЫ КОММУТАЦИИ
Для студентов направления
5522200
Ташкент 2003
1.Цель работы
В
результате выполнения работы студент должен знать:
-
основные принципы синхронизации,
-
назначение, способы реализации методов сетевой синхронизации,
-
организацию тракта ИКМ-30, назначение синхронизации по тактовой
частоте, цикловой и сверхцикловой синхронизации,
-
назначение линейных кодов.
2.Задание при подготовке к работе
При подготовке к работе необходимо изучить следующие
вопросы:
-
основные теоретические сведения – синхронизация тракта ИКМ-30 и способы
сетевой синхронизации,
-
способы кодирования линейных сигналов.
3.Отчет
Отчет по работе должен
содержать:
-
краткий конспект о цели занятия, назначении, принципах синхронизации и
способах кодирования линейных сигналов.
4. Контрольные вопросы
1. Назначение синхронизации.
2. Приведите структуру тракта
ИКМ-30.
3. Для чего предназначена и как
выполняется синхронизация по тактовой частоте.
4. Для чего предназначена и как
выполняется цикловая синхронизация.
5. Для чего предназначена и как
выполняется сверхцикловая синхронизация.
6. Назначение сетевой
синхронизации.
7. Какие существуют методы
сетевой синхронизации.
8. Способы кодирования линейных
сигналов.
5.Основные теоретические сведения
5.1. Синхронизация в ИКМ
5.1.1.
Структура цифрового сигнала в групповом тракте системы передачи с ИКМ
Система и аппаратура передачи ИКМ-30 были
разработаны для использования на соединительных линиях между АТС местных
телефонных сетей с целью образования 30 импульсных каналов (30 каналов ТЧ на
парах низкочастотных кабелей с бумажной или полиэтиленовой изоляцией, с
диаметром жилы 0,5;0,6;
Кроме 30 речевых каналов в системе
предусмотрены один временный канал для передачи линейных и управляющих
сигналов, необходимых для установления между источниками соединения по каждому
речевому каналу и их разъединения после окончания разговора, и ещё один
временной канал, используемый для синхронизации генераторного оборудования
полукомплектов (оконечных станций) системы. Для эксплуатационных целей по СЛСП
(соединительные линии системы передачи) необходимо также передавать
дополнительную служебную информацию. Информация, передаваемая по 32-м каналам,
формируется на передающей станции в единый групповой цифровой сигнал (ГЦС). На приёмной
станции системы происходит распознавание, выделение и распределение по
назначению принимаемого цифрового потока.
Групповой цифровой сигнал, представленный
на рис.1, представляет собой
последовательность следующих друг за другом 512 ти 8-разрядных
кодовых групп, которые образуют сверхцикл передачи.
Частота следования сверхцикла f=500Гц, а его длительность Tсц=2мс. Сверхцикл состоит из 16 циклов, каждый из которых объединяет 32 импульсных канала. Длительность цикла Тцс=125мкс, что определяет частоту следования циклов fц=8кГц. Для каждого импульсного канала в цикле выделяется интервал равный 3,9мкс. Каждый импульсный канал рассчитан на передачу информации 8-разрядным бинарным кодом. Следовательно, длительность одного разряда (элемента) кода составит 0,49мкс, а частота следования элементов кода ГЦС f э =2048кГц.
Рис.
1. Структура группового цифрового сигнала
Нормальное функционирование аппаратуры передачи
ИКМ-30 обеспечивается наличием трёх видов синхронизации её приёмной части: по
тактовой частоте, по циклам и сверхциклам.
5.1.2.
Синхронизация по тактовой частоте
Синхронизация по тактовой
частоте необходима для обеспечения равенства скоростей обработки информации на
передаче и приёме. Она выполняется путём выделения колебания тактовой частоты
2048кГц из спектра ГЦС на приёмной станции. Выделение тактовой частоты можно
выполнить с помощью так называемого резонансного метода. Применить этот метод
можно потому, что дискретная часть энергетического спектра ИКМ сигнала содержит
тактовую частоту. Упрощенная схема устройства выделения тактовых интервалов
использующего этот метод показана на
рис.2.

Рис. 2. Упрощенная схема устройства выделения
тактовых интервалов
Выпрямитель (Вып) переводит двухполярный линейный
сигнал в однополярный. Узкополосный фильтр (УПФ) выделяет гармонические
колебания тактовой частоты fт. К избирательности этого фильтра должны быть
предъявлены жесткие требования, в противном случае часть непрерывной
составляющей энергетического спектра однополярного ИКМ сигнала пройдет через
фильтр и вызовет фазовые дрожания тактовой частоты, т.е. изменение временных
интервалов между импульсами. Формирование импульсной последовательности
тактовой частоты fт осуществляется в формирующем устройстве (ФУ). С выхода ФУ
тактовая частота подается на приёмное генераторное оборудование, управляя его
работой.
5.1.3. Синхронизация по циклам
Синхронизация по циклам требуется для правильного распределения
декодированных АИМ сигналов по соответствующим индивидуальным каналам приёмной
станции и обеспечивается путём совмещения времени канальных интервалов циклов
принимаемого ГЦС и управляющих последовательностей импульсов генераторного
оборудования приёма. Для этого используется синхросигнал, сформированный на
передающей станции, который передается по линейному тракту совместно с информационными
сигналами. Для выделения синхросигнала на приемной станции он наделяется
отличительными признаками. В системах передачи с ИКМ ими являются постоянная
структура и частота следования. В качестве синхросигнала можно использовать
один двоичный символ или группу символов определённой структуры. В настоящее
время используется многосимвольная
синхрогруппа, обеспечивающая быстрое её нахождение при потере
синхронизма. При включении аппаратуры цикловой синхронизм устанавливается через
определенный промежуток времени, который называется - временем вхождения в синхронизм. При нарушении синхронизма
система переходит в режим поиска синхронизма. Ввиду того, что при отсутствии
циклового синхронизма работа системы с ИКМ невозможна, необходимо, чтобы
время как вхождения так и поиска было
как можно меньшим. В современных системах с ИКМ это время не превышает
нескольких миллисекунд, так как его увеличение может вызвать разъединение
приборами АТС.
Применительно к cтруктуре
цифрового сигнала в групповом тракте системы передачи с ИКМ (рис.1), цикловую
синхронизацию можно описать следующим способом. Для цикловой синхронизации в
каждом цикле ГЦС, используются нулевые каналы в чётных циклах. В качестве
циклового синхросигнала (ЦС) используется сигнал вида 0011011, который
размещается в разрядах Р1-Р7. Формирование ЦС и ввод его в ГЦС осуществляется
аппаратурой передающей станции. Разряды Р0 в нулевых каналах всех циклов могут
быть использованы для передачи дискретной информации ДИ. Нулевые каналы
нечётных циклов в сверхциклах кроме передачи дискретной информации используются
следующим образом. Символ разряда Р2 предназначен для передачи на
противоположную станцию аварийного сигнала о потере цикловой сигнализации, а
разряд Р5 - для передачи служебного сигнала "Контроль остаточного
затухания". На месте разряда Р1 всегда передаётся логическая единица.
Остальные разряды не используются.
Приёмник цикловой синхронизации, его
схема и принцип действия, описываются ниже.
Обращаясь к современной
терминологии и технологиям, можно представить структуру цикла и сверхцикла
первичного уровня иерархии PDH, и на её примере разобраться с общими
принципами.
5.1.4. Структура
цикла и сверхцикла первичного уровня иерархии PDH
Введём
новые понятия чтобы разобраться в приведённой теме:
Цикл - "Фрейм"
Сверхцикл - "Мультифрейм"
Импульсный канал - "Тайм - слот"
В структуре фрейма тайм-слот Т0 используется
для целей синхронизации и обнаружения ошибок путем контроля четности на основе
процедуры CRC-4.Тайм-слот Т16
в основном формате используется для сигнализации, остальные 30 тайм-слотов:
Т1-Т15 и Т17-Т31 являются информационными. Для решения
задач того, что 16 бит тайм-слотов Т0 и Т16 одного фрейма недостаточно для
решения задач синхронизации, управления и сигнализации 30-ти речевых каналов,
объединяют 16 фреймов, организуя новую структуру мультифрейм. В результате для
синхронизации, сигнализации и контроля ошибок потока Е1 используется
распределённое поле 16x8=108 бит тайм-слотов Т16. Принимая во внимание, что
фреймы в мультифрейме нумеруются от F0 до F15, а биты в Т0 от 1 до 8 (слева
направо), можно представить структуру распределённого поля управления в виде таблицы, размером 16x8:

Рассмотрим структуру таблицы, в ней использованы следующие обозначения:
- CRO SMF 1,2 - Первый и
второй субмультифреймы (SMF), структуры по 8 фреймов каждая, содержащие
полные наборы (4 бита) CRC-4 (C1,C2,C3,C4). CRC-4 - процедура избыточного кодирования,
использующая порождающим полином 4-го порядка для формирования контрольной
суммы блока, равного длине SMF,
позволяет обнаружить ошибки используя всего 4 дополнительных бита
на всю длину SMF.
- FAS - четные фреймы,
содержащие, кроме бита #1 CRC-4 , стандартную "горизонтальную"
битовую последовательность (биты #2-#8): 0011011, называемую сигналом
синхронизации (выравнивания) фрейма - FAS, или синхрословом, используемым
для синхронизации Е1 последовательности.
- NFAS - нечетные фреймы,
называемые фреймами, не содержащими сигнала синхронизации - NFAS. В этих
фреймах второй бит всегда "1" и используется в схеме
синхронизации фрейма.
- RA1 - бит индикации аварийного состояния на
удалённом конце систем PDH.
- E - бит сигнализации об
ошибке принятой последовательности субмультифрейма SMF.
- Sa4-Sa8 - резервные
биты, которые могут быть использованы для целей мониторинга PDH систем с
топологией "точка-точка", так же один из этих бит можно
использовать для передачи статуса синхронизации в системах PDH, SDH. Биты
Sa4-Sa8 устанавливаются в состояние "1" на участках пересечения
национальных границ.
Указанные выше 216 битовых позиций дают возможность
осуществить ряд функциональных задач управления системами PDH. В мультифрейме,
представленном в виде матрицы 16x256 бит, первые 8 бит каждых двух строк
формируют восьмикратно повторяющийся шаблон следующего вида.
x0011011
x1xxxxxx
который на мультифрейме выглядит 8-зубчатой гребёнкой, зубья которой битовые слова (0011011) фреймов FAS, связанные "вертикальной" последовательностью (0101010101010101). Отслеживая этот шаблон, можно судить о том, является ли данный мультифрейм выравненным, т.е. синхронизированным, предотвращая ложную синхронизацию, которая могла бы быть вызвана фрагментом сигнала случайно совпадающим с синхрословом, если факт синхронизации устанавливался бы на уровне фрейма по одному синхрослову.
5.1.4. Синхронизация по сверхциклам
Кроме цикловой синхронизации в системах передачи с ИКМ должна также осуществляться сверхцикловая синхронизация, которая необходима для правильного распределения сигналов управления и линейных сигналов: она обеспечивается путём совмещения времени начала сверхциклов принимаемого ГЦС и генераторного оборудования приёма.
Устройства цикловой и
сверхцикловой синхронизации содержат формирователи синхросигнала на передающей
станции и приемники синхросигнала на приёмной станции. Формирователь формирует
синхросигналы выбранной структуры, которые через устройство временного
обьединения вводят в групповой цифровой тракт. Одна из возможных схем
формирователя показана на рис.3.

Рис.3.Формирователь
синхросигналов
Изменяя число ячеек регистра и порядок подключения
ключей, формируют кодовую группу нужной структуры. Периодичность включения
формирователя определяет генераторное оборудование передачи (ГОпер). Приёмник
синхросигнала осуществляет контроль состояния циклового и сверхциклового
синхронизма при работе системы передачи, обеспечивает вхождение системы в
синхронизм при включении аппаратуры и при нарушениях синхронизма в процессе работы.
Принцип действия приёмника синхросигнала рассмотрим на примере приёмника со
скользящим поиском и одноразрядным сдвигом, применяемого в ИКМ-30. Контроль
состояния циклового синхронизма в данном случае осуществляется проверкой
совпадения во времени символов синхросигналов, поступающих с линии и
вырабатываемых генераторным оборудованием приёма (ГОпр).
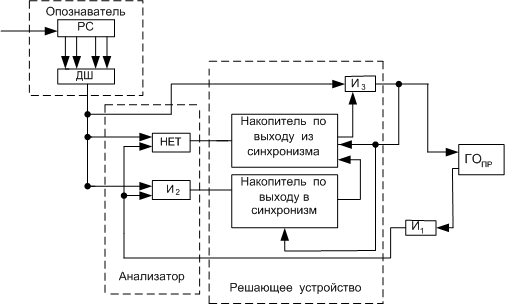
Рис.4. Структура приемника
цикловой синхронизации
Приёмник цикловой синхронизации (рис.4) содержит опознаватель, анализатор и решающее
устройство. Опознаватель синхросигнала служит для выделения синхрогруппы из
принятого ИКМ сигнала и состоит из регистра сдвига (РС) и дешифратора (ДШ),
представляющего собой многовходную схему совпадения "И". Анализатор
синхросигнала содержит логические ячейки НЕТ и И2, к которым подключены выход
ДШ и через схему И1 , генераторное оборудование приёма. Решающее устройство
состоит из накопителя по выходу из синхронизма, накопителя по входу в
синхронизм и логической ячейки И3. При поступлении в регистр опознавателя
синхросигнала заданной структуры он срабатывает и на входе схемы ДШ формируется
единичный сигнал. В анализаторе осуществляется сравнение момента появления
этого сигнала и сигнала, подаваемого через схему И1 от генераторного
оборудования приёма. Если моменты появления этих сигналов совпадают, то
анализатор принимает решение о наличие синхронизма. При этом на выходе схемы
НЕТ сигнал отсутствует, а на выходе схемы И2 формируется сигнал,
соответствующий моменту опознавания синхросигнала.
Наличие этого сигнала вызывает заполнение накопителя по входу в синхронизм и
сброс накопителя по выходу из синхронизма в нулевое состояние, т.е. последний
оказывается полностью разряженным. Ложные синхрогруппы не совпадают по времени
с сигналом на выходе схемы И1 и поэтому не участвуют в процессе накопления.
Если синхронизм отсутствует в нескольких следующих подряд циклах (в ИКМ-30-в
четырёх), накопитель по выходу из синхронизма наполняется, и через схему И3
подает сигнал запрета на генераторное оборудование приёма. При получении этого
сигнала, работа делителя генераторного оборудования приёма и декодирование
сигнала прекращается. В результате следующее опознавание будет проводиться на
тех же позициях, но в следующем цикле. Если при вторичном опознавании на этих
позициях ложная синхрогруппа не сформируется, то сигнал с выхода схемы И1 вновь
заполнит накопитель по выходу из синхронизма, схема И3 пошлёт сигнал запрета на
генераторное оборудование приёма и система перейдёт в режим поиска синхронизма.
Если на одних и тех же позициях ложная синхрогруппа появится 2 раза подряд, то
сигнал на выходе ДШ вызовет появление сигнала на выходе схемы И2, схема
накопителя по входу в синхронизм заполнится и сбросит накопитель по выходу из синхронизма
в нулевое состояние. Процесс опознавания сигнала не прекращается до тех пор,
пока вновь не заполнится накопитель по выходу из синхронизма. То
обстоятельство, что РУ принимает решение об отсутствии синхронизма только при
поступлении подряд нескольких сигналов ошибки, предохраняет систему от сбоя
синхронизации при кратковременных искажениях синхросигнала. Принцип действия
приёмника сверхцикловой синхронизации аналогичен приведенному выше. Однако
необходимо иметь в виду, что поиск сверхциклового синхронизма осуществляется
после установления цикловой синхронизации. Организация сверхциклов связана с
тем, что передача СУВ для каждого телефонного канала осуществляется не в каждом
цикле передачи, а один раз в сверхцикле. Применительно к cтруктуре цифрового сигнала
в групповом тракте системы передачи с ИКМ, сверхцикловую синхронизацию можно
представить следующим образом. Для определения начала сверхцикла на передающей
станции в разряды Р0-Р3 16-го канала нулевого цикла вводится сверхцикловой
сигнал (СЦС) вида 0000. Три разряда этого канала (Р4, Р6, Р7) используются для
передачи балластного сигнала 101, а разряд Р5 - для передачи на противоположную
станцию аварийного сигнала о потере сверхцикловой синхронизации. При вхождении
в синхронизм приёмной станции в начале осуществляется поиск циклового
синхросигнала, а затем - сверхциклового.
5.2. Сетевая синхронизация
5.2.1. Общие
принципы
Проблема
синхронизации цифровых сетей является частью общей проблемы синхронизации
цифровых последовательностей, известной с момента использования ИКМ,
плезиохронной цифровой иерархии PDH, а так же синхронной цифровой иерархии SDH.
Целый ряд возможностей аппаратуры SDH позволяет более
эффективно строить систему тактовой сетевой синхронизации, восстанавливать тактовую
частоту исходящего потока Е1 (поток 2048 кбит/сек). Вследствие использования в
системах SDH механизма смещения указателей в компонентных сигналах возникает
фазовое дрожание (джиттер) значительно большей величины, чем в системах PDH,
которое к тому же содержит интенсивные низкочастотные составляющие, трудно
поддающиеся фильтрации. По этой причине поток Е1, прошедший через системы SDH,
не следует использовать для синхронизации другого оборудования. По-видимому,
из-за этого обстоятельства и появилось ошибочное мнение, что компонентные
потоки Е1 должны быть исключены из схемы синхронизации сети SDH. Это
справедливо только для сигналов, прошедших через сеть SDH. В тех же случаях,
когда такие сигналы поступают непосредственно от цифровых коммутационных
станций или систем PDH, их можно использовать для синхронизации, более того,
это является основным способом сопряжения систем синхронизации PDH и SDH.
В
некоторой новой аппаратуре SDH предусмотрено восстановление тактовой частоты
исходящего сигнала 2048кбит/сек, и такой сигнал может использоваться для
синхронизации другого оборудования. Такая возможность заложена, например, во
второй версии аппаратуры SDH Siemens, SMA Series, 3 Marconi Communicationsm,
платах компонентных потоков TR2-8T и TR2-26T ECI Telecom.
5.2.1.
Синхронизация цифровых сетей
Проблема синхронизации цифровых сетей является одной из основных. Нарушение синхронизации на сети приводит к возникновению ошибок при приеме информации. Возможны следующие ситуации несовпадения частоты следования тактовых сигналов между приемным и передающим оборудованием: если одна частота выше другой, то возникает, так называемый, "сдвиг частот ", случай изменения частот одна относительно другой с относительно медленным ритмом - " блуждание", если частоты изменяются относительно друг друга быстро - "джиттер" (рис.5).
Рис.5.Несовпадение частот между приемным и
передающим оборудованием
Учитывая, что в общем случае
сеть может состоять из нескольких участков, синхронизируемых от таймеров
различной точности, важно иметь с одной стороны, предельные значения частоты
появления проскальзывания (нормы), регламентируемых стандартами в целях
обеспечения определённого качества синхронизации (или качества обслуживания), с
другой стороны - статистику проскальзываний, возникающих при взаимодействии
между участками сети с установленными на них таймерами различной точности. Для
такой статистики, в свою очередь, нужна привязка к какой-то системе
классификации таймеров по точности (классам), чтобы сделать объём этой статистики
представительным и ограниченным, привязанным к этим самым классам.
5.2.2. Стандарты и нормы синхронизации цифровых сетей
Целый ряд возможностей аппаратуры SDH позволяет более эффективно строить систему тактовой сетевой синхронизации, восстанавливать тактовую частоту исходящего потока Е1 (поток 2048 кбит/сек). Вследствие использования в системах SDH механизма смещения указателей в компонентных сигналах возникает фазовое дрожание (джиттер) значительно большей величины, чем в системах PDH, которое к тому же содержит интенсивные низкочастотные составляющие, трудно поддающиеся фильтрации. По этой причине поток Е1, прошедший через системы SDH, не следует использовать для синхронизации другого оборудования.
По-видимому, из-за этого
обстоятельства и появилось ошибочное мнение, что компонентные потоки Е1 должны
быть исключены из схемы синхронизации сети SDH. Это справедливо только для
сигналов, прошедших через сеть SDH. В тех же случаях, когда такие сигналы
поступают непосредственно от цифровых коммутационных станций или систем PDH, их
можно использовать для синхронизации, более того, это является основным
способом сопряжения систем синхронизации PDH и SDH .
Если цифровая сеть локальна (ее узлы близки друг к другу
настолько, что можно пренебречь временем распространения сигнала между ними) и
достаточно проста (имеет несколько узлов, например, с топологией
"звезда", а на центральном её узле стабильный общий источник тактовой сетевой
синхронизации), то для такой "идеальной " сети проблемы синхронизации
отсутствуют. Они возникают тогда, когда
несколько таких сетей (каждая со своим источником синхронизации) объединяются в
одну сложную сеть. Для её синхронизации необходимо, чтобы точность источников
тактовой синхронизации отдельных сетей была одинаковой и достаточно высокой
(1*10-11 до1*10-12) , или чтобы для этой новой сети была
построена специальная сеть распространения сигнала синхронизации с единым
высокостабильным источником тактовой синхронизации. Если эти условия не
соблюдаются и существует разница в частотах источников тактовой синхронизации
на передающем и принимающем узлах, то происходит накапливание за определённое
время разности фаз принимаемой цифровой последовательности и
последовательности, генерируемой источником тактовой синхронизации данного
(принимаемого) узла. Эта разность может стать соизмеримой с длиной тактового
интервала. В этот момент может произойти срыв синхронизации, вызванный
пропаданием одного импульса (тактового интервала). Это явление называют
«слипом» (slip), или «проскальзыванием». Субъективно проскальзывания приводят к
появлению щелчков при передаче голоса или радиовещания, объективно это ведёт к
увеличению числа ошибок в синхронных сетях при передаче данных. Качество
синхронизации в этом случае может быть оценено периодом времени, за которое
накопленная разность фаз приводит к срыву цикловой синхронизации, или частотой
проскальзывания в единицу времени (минуту, час, сутки).
Цель сетевой синхронизации - получить минимально возможное число
проскальзывании за выбранный интервал времени. Это равносильно установке
наиболее точного источника синхросигнала или таймера на всех узлах сети. Эту
задачу можно упростить до эквивалентной задачи: установки одного высокоточного
таймера в одном из центральных узлов сети и трансляции его показаний в другие
узлы сети. Для этого нужно не только иметь высокоточный таймер, но и надёжную
систему распределения сигнала синхронизации на все узлы сети.
Система такого распределения основана обычно на иерархической
схеме, заключающейся в создании ряда базовых точек, где находится первичный
эталонный генератор тактовых
импульсов (ПЭГ), или первичный таймер, сигналы которого затем распределяются по
сети, создавая вторичные источники (вторичный или ведомый эталонный генератор
тактовых импульсов (ВЭГ) или вторичный таймер), реализуемый либо в виде таймера
транзитного узла либо таймера локального
(местного) узла.
Стандарты
предусматривают 4 режима работы источников синхросигнала узлов синхронизации:
- Режим первичного
эталонного таймера ПЭГ (главный узел) – независимая синхронизация.
- Режим принудительной
синхронизации - режим ведомого задающего генератора ВЭГ (транзитный или
местный узлы).
- Режим удержания с точностью удержания 5*10-10
для транзитного узла и 1*10-8 для местного узла и суточным дрейфом
1*10-9 и 2*10-8 соответственно.
- Свободный режим (для транзитного и местного узлов), точность
поддержания которого зависит от класса источника и может составлять 1*10-8 для
транзитного и 1*10-6 для местного узлов.
5.2.3. Варианты организации сетевой синхронизации
- Асинхронная сеть - тактовые генераторы станции не зависят друг от
друга и фактически скорость входящего цифрового потока может быть выше или
ниже местного тактового генератора. Это означает, что в процессе привязки
поступающего потока битов к тактовым сигналам станции будут время от
времени либо пропуски, либо повторы импульсов. Чем прочнее и стабильнее
работа тактового генератора станции, тем ниже интенсивность ошибок. В
такой сети используют для четкой работы системы высокостабильные тактовые
генераторы представляющие собой хронирующие автономные источники тактовых
импульсов (цезиевые или рубидиевые генераторы) с точностью не хуже 10-11.
Он калибруется вручную или автоматически по сигналам с датчиков мирового
координированного времени UTC. Сигналы генератора (ПЭГ) затем
распространяются по наземным линиям связи для реализации того или иного
метода узловой синхронизации.
Схема такого построения сети приводится на рис. 6..
Рис.6. Асинхронная сеть
·
Синхронные сети с ведущими и ведомыми генераторами. В синхронных сетях
с ведущими и ведомыми генераторами один из генераторов является ведущим,
остальные синхронизируются с ним, используя цифровой поток ведущей станции.
Скорость всех потоков одинаковая, но фазы могут быть различными вследствие
задержки. В процессе подстройки сигналов по фазе к местному генератору
искажение сигнала не происходит. Схема такого построения сети приводится на
рис. 7.
·
Синхронные синхронизирующиеся сети с усреднением тактовой частоты
генераторов станций. Задача на такой сети - произвести взаимную синхронизацию.
Поступающие на вход цифровой линии биты передаются и должны быть приняты со
скоростью передающей станции. На каждой станции имеется свой тактовый генератор
со своей скоростью цифрового потока. Общая структура схемы с усреднением
тактовой частоты выглядит, как показано на рис. 8..
Рис. 7. Синхронная сеть с
ведущим и ведомыми генераторами
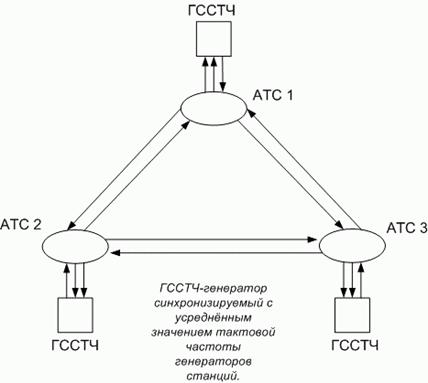
Рис.8. Схема синхронных синхронизирующихся сетей с усреднением тактовой частоты генераторов станций
Входящие потоки такой сети подаются на анализатор (рис.10), который выбирает самый устойчивый поток, он делит его в 512 раз, получает частоту 4кГц и подает на ФД - фазовый детектор.
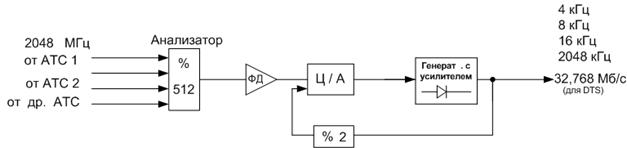
Рис. 9. Схема выделения
синхросигнала на синхронных синхронизирующихся сетях с усреднением тактовой частоты
Далее сигнал попадает на цифро-аналоговый
преобразователь и на генератор с усилителем, который доводит сигнал до опорной
тактовой частоты системы (на примере DTS - fопор . =32МГц) и далее с
помощью делителя частоты на два, получает все необходимые частоты, в том числе
и fт=2048 кГц, на основе которой будет сформирован исходный поток на другие
АТС. Т.к. такая же процедура выполняется на всех АТС, в результате, скорость
обработки будет единая для всех АТС.
5.3. Кодирование
5.3.1. Основные требования к кодам
Код, используемый для передачи по линейному тракту ЦСП, должен удовлетворять следующим основным требованиям:
- спектр линейного
сигнала не должен содержать постоянной составляющей, что позволяет
использовать симметрирующие трансформаторы и обеспечить дистанционное
питание регенераторов постоянным током;
- энергетический спектр
сигнала должен занимать как можно более узкую полосу частот, причем
желательно, чтобы максимум этого спектра лежал в области относительно
низких частот, что позволяет получить большие длины участков регенерации,
т.к. в области более низких частот уменьшается затухание кабеля и
переходное влияние;
- должна обеспечиваться
возможность выделения сигнала тактовой частоты, необходимого для
нормальной работы регенераторов;
- структура кода должна
быть такой, чтобы в случае её нарушения за счет возникновения ошибок в
процессе регенерации можно было бы осуществлять контроль за коэффициентом
ошибок в процессе эксплуатации.
5.3.2. Практические методы
линейного кодирования потока данных
Учитывая, что канал, как среда передачи, может быть электрическим, оптическим, или радиоканалом, полученную последовательность приходится еще, по крайнем мере, дважды перекодировать для оптимизации её прохождения через интерфейс (интерфейсное кодирование) и линию связи (линейное кодирование). Поток бит, полученный в результате квантования и двоичного кодирования (кодификации), оптимален только с точки зрения уменьшения ошибок квантования, но непригоден для передачи по каналу связи по ряду причин, основные из которых следующие:
- выходной цифровой поток
имеет широкий спектр, что затрудняет его передачу по каналу связи с
ограниченной полосой пропускания и осложняет процесс регенерации сигнала
синхронизации, передаваемого в канале, особенно в случае восстановления
потерянного синхронизма;
- спектр сигнала имеет
значительную долю низкочастотных составляющих, которые могут интерферировать
с составляющими передаваемого низкочастотного сигнала;
- спектр содержит,
большую постоянную составляющую, усложняющую фильтрацию напряжения сети
питания.
Для оптимизации спектра сигнала,
подаваемого в линию связи, используется так называемое линейное кодирование.
Оно должно обеспечить:
·
минимальную спектральную плотность на нулевой частоте и ее
ограничение на нижних частотах;
·
информацию о тактовой частоте передаваемого сигнала в виде
дискретной составляющей, легко выделяемой на фоне непрерывной части спектра;
·
достаточно узкополосный непрерывный спектр для передачи сигнала через канал связи без
искажений;
·
малую избыточность, для снижения относительной скорости
передачи в канале связи;
·
минимально возможные длины блоков повторяющихся символов
("1" или "О") и диспаритетность, (неравенство числа
"l" и "0" в кодовых комбинациях).
5.3.3.
Линейные коды
При реализации кодов необходимо
представлять их символы в виде элементов дискретного сигнала той или иной
формы, удобной для выполнения
последующих операций и передачи по линиям связи. Формы сигналов не обязательно
жестко закрепляются за символами кода. Широко распространены правила
относительного кодирования, когда один символ кода отображается чередованием
форм, а второй - формой предыдущего элемента. Выбор формы сигнала самым
непосредственным образом определяет: энергетический спектр (занимаемую полосу
частот), возможности выделения сигналов синхронизации, скорость передачи в
расчете на единицу полосы частот (удельную скорость передачи). Формы цифровых сигналов,
предназначенных для передачи по линии связи, получили наименование линейных
кодов (ЛК). ЛК применяются для передачи данных без модуляции в первичной полосе
частот, начинающейся с нуля. Иначе говоря, кадры цифровых систем передачи,
сформированные и представляющие собой обычные двоичные последовательности,
перед подачей в линию связи подвергаются соответствующему преобразованию в
линейном кодере. Рассмотрим основные типы линейных кодов.
·
Код без возвращения к
нулю - Non Return to Zero (NRZ)
представляет собой обычную двоичную последовательность и код является
простейшим линейным кодом, широко применяемым на практике.
Важной особенностью спектра NRZ сигнала является конечное значение спектральной
плотности на нулевой частоте.
Существуют две разновидности этого кода
- униполярный и биполярный NRZ коды. В биполярном NRZ коде логической единице
соответствует прямоугольный импульс положительной полярности, а логическому
нулю - прямоугольный импульс отрицательной полярности. Длительность импульсов
равна длительности одного бита. Положительное или отрицательное напряжение на
выходе кодера сохраняется неизменным в течении длительности символа, что и
определяет термин "невозвращающийся в нуль" код. Униполярный NRZ код
отличается от биполярного, тем что логическому нулю соответствует не
отрицательный импульс, а нулевое напряжение.
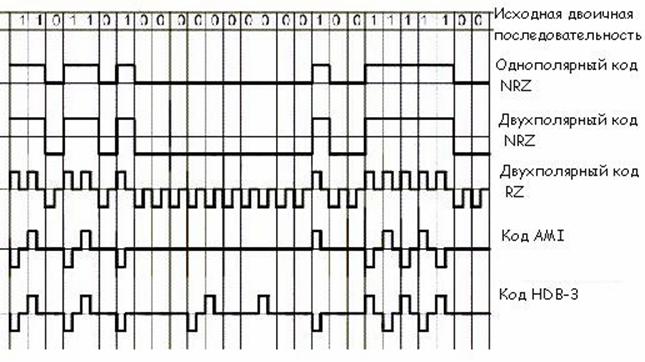
Рис. 11 Примеры структур линейных кодов.
Форма сигнала на
выходе биполярного и униполярного NRZ кодера имеет вид, приведенный на рис. 12:
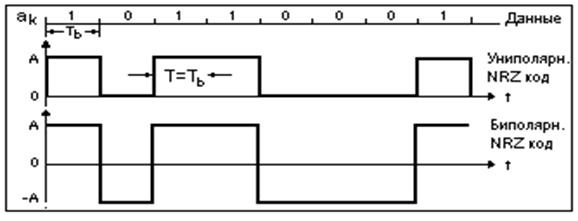
Рис. 12. Код без
возвращения к нулю NRZ
Коэффициент ak определяет k-ый символ в последовательности
передаваемых по каналу связи символов. T- Длительность символа.
Tb-длительность одного бита передаваемой информации.
Спектр униполярного NRZ кода отличается от спектра биполярного NRZ кода
наличием дискретной спектральной линии на нулевой частоте.
·
В коде с возвращением к нулю - Return to Zero (RZ) единица передается импульсом вдвое меньшей
длительности. Спектры простейших типов кодов обладают следующими недостатками:
наличие постоянной составляющей; малая мощность тактовой частоты (частоты
синхронизации); возможное наличие длинных последовательностей нулей. Код RZ
требует более широкую полосу пропускания, чем NRZ, но имеет меньшее значение
постоянной составляющей. Широкое применение в системах передачи,
предназначенных для работы по металлическим кабелям, нашли троичные коды. Их
применение основано на возможности разнополярного подключения генератора ЭДС к
нагрузке (металлическому кабелю). Код имеет две разновидности - биполярный RZ код и униполярный RZ
код.
Униполярный RZ код отличается от биполярного тем, что логическому нулю
соответствует не отрицательный импульс, а нулевое напряжение. Спектр
биполярного RZ сигнала подобен спектру биполярного NRZ и также имеет постоянную
составляющую. Форма сигнала на выходе биполярного и униполярного RZ кодера
приведена на рис.13:
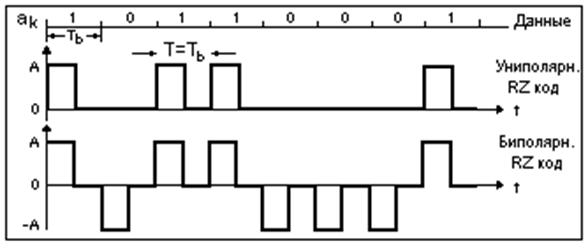
Рис. 13.Код с возвращением к нулю
RZ
·
Код с чередующейся полярностью импульсов (ЧПИ) - Alternate Mark Inversion (AMI) -
биполярный код, представляющий одну из разновидностей троичного кода: нулям
соответствует отсутствие импульса, а единицам - попеременно чередующиеся
прямоугольные импульсы отрицательной и положительной полярности. Так как
постоянная составляющая импульсной последовательности равна нулю, то возможна
передача по линиям, содержащим разделительные трансформаторы. Преимуществом
данного кода является простота преобразования в двоичный код.
·
Широкое распространение получил код высокой плотности
следования единиц КВП-3 - High-Density
Bipolar (HDB-3), у которого n=3. Основным требованием к линейным кодам
волоконно-оптических систем передачи (ВОСП) является использование только двух
значащих уровней сигнала в связи с тем, что источник излучения (лазер или
светодиод) работает в двух мощностных режимах - наличие или отсутствие
излучения.
·
Применение непосредственно кодов NRZ и RZ в ВОСП ограничено
. Большее распространение получили коды с корреляционными связями и , в
частности , код CMI -Соded Mark
Inversion : двухуровневый , без возвращения к нулю двоичный код класса 1b2b . В коде CMI нули передаются
последовательно сменой нуля и единицы на одном тактовом интервале , а единицы -
попеременным последовательным сочетанием двух нулей или двух единиц, (т.е.
каждой "1" присваивается соответственно либо комбинация "11", либо
"00", а каждому "0"
- импульс "01") .
·
В высокоскоростных системах применяется скремблированный сигнал в формате NRZ.
Рассмотрим алгоритмы скрeмблирования подробнее.
Смысл скремблирования состоит в получении последовательности, в которой
статистика появления нулей и единиц приближается к случайной, что позволяет
удовлетворять требованиям надежного выделения тактовой частоты и постоянной
спектральной плотности мощности передаваемого сигнала, сосредоточенной в
заданной области частот. Заметим, что скремблирование широко применяется во
многих видах систем связи для улучшения статистических свойств сигнала. Обычно
скремблирование осуществляется непосредственно перед модуляцией. Скремблирование (от английского слова to scramble - перемешивать) производится на передающей стороне с
помощью устройства - скремблера, реализующего логическую операцию суммирования
по модулю 2 исходного и преобразующего псевдослучайного двоичных сигналов. На
приемной стороне осуществляется обратная операция - дескремблирование
устройством, называемым дескремблеpoм. Дескремблер выделяет из принятой
исходную последовательность. Основной частью скремблера является генератор
псевдослучайной последовательности (ПСП), выполненного в виде линейного
n-каскадного регистра с обратными связями, формирующего последовательность максимальной длины
2n-1. При потере синхронизма
между скремблером и дескремблером время восстановления синхронизма не превышает
числа тактов, равного числу ячеек регистра скремблера.
5.3.4. Подробнее о кодах
AMI и HDB-3
В
коде AMI осуществляется чередование импульсов положительной и отрицательной
полярности при преобразовании единичных символов исходной двоичной
последовательности, вне зависимости от числа нулевых символов между ними.
Благодаря указанному принципу преобразованию в энергетическом спектре кода в
линии исключается постоянная составляющая. Основная энергия кода AMI
сосредоточена в области частот, близких к 0,5fт. Поэтому расчет
участка регенерации и оценка взаимных влияний, должны осуществляться на 0,5fт.
Благодаря
используемому принципу чередования полярности импульсов код AMI позволяет легко
обнаружить ошибки, возникающие при регенерации сигнала, так как ошибка при
регенерации любого символа приведёт к нарушению принципа чередования
полярностей символов в линейном тракте. По числу таких нарушений за
определённое время можно оценить коэффициент ошибок в линейном тракте. При этом
следует иметь в виду что в некоторых случаях ошибки могут оставаться
необнаруженными (если, например, ошибки имели место при регенерации нескольких
подряд следующих символов и не нарушили при этом указанный принцип построения
кода).
Наиболее
существенным недостатком кода с AMI является необходимость передачи по
линейному тракту сигнала с длинными сериями нулей, что может нарушить
нормальную работу регенераторов, так как затрудняется процесс выделения
тактовой частоты. С целью устранения этого недостатка было разработано
несколько модификаций кода с AMI, наибольшее распространение среди которых
получил код HDB-3.
Принцип построения кода HDB-3 такой же, как и кода с AMI, до тех пор, пока между двумя единичными символами не появится более трех следующих подряд нулевых символов. При этом каждая последовательность из четырех нулевых символов (0000) в исходном двоичном коде заменяется одной из двух последовательностей вида ВООУ или ОООУ, где В обозначает импульс, полярность которого противоположна полярности предшествующего импульса, а V - импульс, полярность которого повторяет полярность предыдущего импульса В. Комбинация вида ОООУ используется в том случае, если после предыдущего символа V появилось нечетное число символов В, а комбинация ВООУ, если после предыдущего символа V появилось четное число символов В. Использование двух замещающих последовательностей обеспечивает чередование полярности символов V, появляющихся в различных местах линейного сигнала, что, в свою очередь, позволяет устранить влияние этих символов на среднее значение, которое так же, как и у кода AMI, оказывается равным нулю. Однако цифровая сумма кода HDB-3 из-за введения символов V оказывается больше, чем для кода с AMI и может составлять 2 (+1/2) или 2(-1/2). Таким образом, при использовании кода HDB-3 существенно сокращается диапазон изменения вероятности появления единичных символов в линейном сигнале, который ограничивается пределами 0,25 < р (1) < 1, в то время как в коде с AMI вероятность появления единичного символа в случайной последовательности практически может уменьшаться до нуля.
Методическое указание к лабораторному занятию
“Синхронизация
в ЦСК”
По курсу “СИСТЕМЫ
КОММУТАЦИИ”
Рассмотрено и одобрено на
заседании
кафедры ТС и СК, протокол №
от 2003г.
Составители:
Еркинбаева
Л.Т.
Абдужаппарова
М.Б.
Ответственный
редактор:
Сон
В.М.
Корректор: Шаврикова Р.У.