УЗБЕКСКОЕ АГЕНТСТВО СВЯЗИ И ИНФОРМАТИЗАЦИИ
ТАШКЕНТСКИЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
Кафедра ТС и СК
Методические
указания
к лабораторной работе
ИЗУЧЕНИЕ КОНСТРУКЦИИ И ПРИНЦИПА ДЕЙСТВИЯ
ИСКАТЕЛЕЙ И СОЕДИНИТЕЛЕЙ
ПО ДИСЦИПЛИНЕ
УЧЕБНАЯ ПРАКТИКА
ДЛЯ СТУДЕНТОВ НАПРАВЛЕНИЯ
ОБРАЗОВАНИЯ
5522300 - ТЕЛЕКОММУНИКАЦИЯ
Ташкент – 2004
Лабораторная работа №5
ИЗУЧЕНИЕ КОНСТРУКЦИИ И ПРИНЦИПА ДЕЙСТВИЯ ИСКАТЕЛЕЙ И СОЕДИНИТЕЛЕЙ
ЦЕЛЬ РАБОТЫ: Изучить
конструкцию, принцип действия и коммутационные возможности искателей и
соединителей, применяемых для реализации коммутационного поля систем
телекоммуникаций.
СОДЕРЖАНИЕ ЛАБОРАТОРНОЙ РАБОТЫ
Используя демонстрационные плакаты, лабораторные макеты и учебные установки систем АТСК-У и «Квант» изучить конструкцию, принцип действия, характеристики и коммутационные возможности шаговых искателей типа ШИ- 11, ШИ- 17, декадно-шаговых искателей типа ДШИ- 100, /ДШИ- 100 М/, а также соединителей типа многократный координатный соединитель МКС, многократный герконовый соединитель (МГС), многократный ферридовый соединитель (МФС), многократный интегральный соединитель (МИС) и многократный электронный соединитель (МЭС).
ЗАДАНИЕ К ЛАБОРАТОРНОЙ РАБОТЕ
1. Изучить конструкцию и принцип действия шаговых и декадно-шаговых искателей - ШИ- 11, ШИ- 17, ДШИ- 100.
Проследить взаимодействие основных частей конструкции искателей при коммутации входа с выходом. Произвести соединение входа с определенным выходом (по заданию преподавателя).
2. Изучить принцип построения и конструкцию соединителей типов МКС, МГС, МФС, МИС, МЭС.
3. Используя лабораторный макет и учебную установку, изучить конструкцию и принцип действия МКС.
4. Произвести соединение заданного входа с определенным выходом (по заданию преподавателя). Определить проводность точки коммутации и размещение пружин.
5. Изучить конструкцию и принципы действия соединителей МГС, МФС, МИС. Разобраться в их сходстве и различии.
6. Изучить принцип действия электронного многократного соединителя типа МЭС, реализацию коммутационной точки: элементная база, параметры. Достоинства и недостатки МЭС.
ЛАБОРАТОРНЫЕ МАКЕТЫ
Для изучения искателей и соединителей в лаборатории кафедры ТС и СК имеются плакаты, изучаемые объекты, учебные установки АТСК-У и «Квант». Макет для изучения искателей позволяет нажатием кнопок приводить в движение соответствующий искатель и устанавливать вход на заданном выходе.
На макете, предназначенном для изучения конструкции и принципа действия МКС, установлен унифицированный МКС, часть вертикалей которого снята для удобства обзора всех элементов конструкции и наблюдения за процессом их работы.
Для управления работой МКС на пульте макета по вертикали расположены ключи, закрепленные за выбирающими электромагнитами, по горизонтали- кнопки, закрепленные за удерживающими электромагнитами МКС. Нажатием ключа и кнопки можно осуществить коммутацию в соответствующей точке, при этом на пульте управления макета загорается лампочка, соответствующая скоммутированному выходу. Учебные установки АТСК-У и «Квант» позволяют студентам ознакомиться с размещением изучаемых объектов на стативах, взаимосвязью отдельных устройств систем коммутации.
ПОРЯДОК ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
При выполнении лабораторной работы необходимо соблюдать последовательность выполнения различных этапов задания, а именно:
1. Рассмотреть конструкцию, принцип действия, коммутационные возможности и параметры различных типов искателей и соединителей по литературным источникам, приведенным ниже, а также по кратким теоретическим сведениям, приведенным в приложении к данным методическим указаниям.
2. Разобраться в последовательности работы элементов конструкции, изучаемого коммутационного прибора на макетах, используя задания преподавателя (какой вход к какому выходу подключить).
СОДЕРЖАНИЕ ОТЧЕТА
Отчетом по данной лабораторной работе является краткий конспект, содержащий:
1. Краткую характеристику всех типов искателей и соединителей, составленную при подготовке к занятию.
2. Диаграммы движения щеток искателей ШИ и ДШИ.
3. Последовательность работы элементов МКС. Сравнительная характеристика 2-х и 3-х позиционных МКС.
4. Принципы коммутации в многократных соединителях МГС, МФС, МИС. Характеристика и реализация коммутационной точки в разных соединителях.
5. МЭС. Принципы построения и реализация коммутационной точки МЭС на разных электронных элементах, а также способы управления этой точкой.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Поясните принцип действия шагового искателя.
2. Поясните принцип действия декадно-шагового искателя.
3. В чем заключается основное отличие декадно-шагового искателя от шагового?
4. Для чего предназначены механические контакты К, В, В11 в ДШИ?
5. Какую нумерацию имеет контактное поле ШИ, ДШИ?
6. Укажите коммутационные параметры искателей ШИ, ДШИ.
7. Каковы преимущества соединителей перед искателями?
8. Какие типы соединителей вы знаете?
9. Поясните принцип действия МКС.
10. Поясните конструкцию вертикали.
11. Какие конструктивные элементы входят в состав выбирающей системы МКС?
12. Поясните принцип построения трехпозиционного МКС, его отличие от 2-х позиционного МКС.
13. Как реализованы и действуют матричные соединители типов МГС, МФС, МИС?
14. В чем заключается отличие соединителей МИС и МФС?
15. Для чего обмотки МФС включаются по дифференциальной схеме.
ЛИТЕРАТУРА
1. Автоматические системы коммутации. /Под редакцией О.Н. Ивановой. – М.: Связь, 1988, с. 456 - 463.
2. Ковалева В.Д. и др. Основы телефонной коммутации. – М.: Радио и связь, 1987, с. 67 – 91.
3. Прокофьева В.А. Квазиэлектронные системы коммутации производственной связи. – М.: Радио и связь, 1984, с. 21- 24, 28– 30, 42- 45.
4. Конспект лекций по ОПТСС. Ташкент.: ТЭИС, 2000, шифр 621, 39 К190.
5. Методические указания к лабораторной работе.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЛАБОРАТОРНОЙ РАБОТЕ
Искателем называется коммутационный прибор с одним входом и несколькими выходами, с помощью которого осуществляется соединение абонентов в коммутационной системе АТС. Искатели, у которых коммутация между входом и выходом создается за счет контактов скольжения под действием электромагнитного привода, называются щеточными.
Щеточный искатель имеет три основные части: статор (неподвижная часть искателя) или контактное поле, образующее выходы искателя; ротор (подвижная часть) или щетки, которые выполняют роль входа; движущий механизм (привод), перемещающий щетки в требуемое положение (Рис. 1.1.).
Рис. 1.1 Кинематическая
схема шагового искателя (а) и его условное изображение (б).
ЭМ - Электромагнит, П - Пружины,
Я
- Якорь, Х - Храпового колеса,
Щ - Щётки, С - Движущаяся собачка,
По характеру привода различают искатели: шаговые, машинные, моторные, с индивидуальным или общим приводом, с прямым или обратным приводом. Классификация электромеханических искателей приведена на рис. 1.2.
Искатель, щетки которого движутся по ламелям контактного поля шагами при поступлении каждого импульса тока, называется шаговым.
Ш а г о в ы е и с к а т е л и ШИ представляют собой электромагнит прямого действия – щетки передвигаются на один шаг при притяжении электромагнитом якоря, воздействующего на ведущую собачку (см. рис. 1.1.). Искатель состоит из трех основных частей: статора (контактного поля ЛI – Лm), движущего механизма (электромагнита ЭМ), ротора (контактных щеток Щ). Движущий механизм шагового искателя представляет собой электромагнит ЭМ, с якорем Я которого соединена ведущая собачка С, находящаяся в зацеплении с храповиком Х. Храповик вместе с жестко связанными с ним контактными щетками является вращающей частью искателя.
Контактное поле – неподвижная часть искателя – состоит из плоских контактных ламелей, отделенных друг от друга изоляционными прокладками.
При поступлении импульса тока в обмотку электромагнита якорь, притягиваясь к сердечнику, обеспечивает посредством рычага с ведущей собачкой перемещение щеток на один шаг. По окончании импульса тока якорь под действием возвратной пружины (рис. 1.1. пружина П) возвращается в исходное положение. Для предохранения щеток от возвратного движения в механизме искателя имеется стопорная собачка, западающая в следующую впадину храпового колеса после окончания шага движения щеток. При повторном импульсе якорь электромагнита вновь притягивается, и щетки перейдут на следующую ламель. Таким образом, в зависимости от числа поступивших импульсов в обмотку электромагнита щетки переместятся на соответствующее число шагов и установятся в определенном положении контактного поля искателя. Основными коммутационными параметрами искателей являются – емкость поля (m) и проводность коммутируемых линий (q). Емкость поля определяется количеством линий, которые можно включить в контактное поле искателя. Проводность определяется числом щеток, коммутирующих соединение. В отечественной коммутационной аппаратуре применяются шаговые искатели типов: ШИ– 11, ШИ- 17, ШИ- 25 и ШИ- 50, каждый из которых имеет один вход и соответственно 10, 15, 20 и 50 выходов.

ЭЛЕКТРОМЕХАНИЧЕСКИЕ
ИСКАТЕЛИ

ЩЕТОЧНЫЕ БЕЗЩЕТОЧНЫЕ

ШАГОВЫЕ ДЕКАДНО- МАШИННЫЕ
МОТОРНЫЕ РЕЛЕЙНЫЕ
![]()
![]()
![]()
![]() ШАГОВЫЕ
ШАГОВЫЕ

ПОДЪЕМНО
ВРАЩАТЕЛЬНОЕ ВРАЩАТЕЛЬНОЕ
ДВИЖЕНИЕ
ДВИЖЕНИЕ
![]()
![]()
ОСНОВНЫЕ КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ


КОНТАКТНОЕ ЩЕТОЧНОЕ ДВИЖУЩЕЕ
ПОЛЕ УСТРОЙСТВО УСТРОЙСТВО
(статор) (ротор) (привод)
![]()
![]() КОММУТАЦИОННЫЕ ПАРАМЕТРЫ
КОММУТАЦИОННЫЕ ПАРАМЕТРЫ
![]()
![]()
![]() ЕМКОСТЬ ПОЛЯ ПРОВОДНОСТЬ
ЕМКОСТЬ ПОЛЯ ПРОВОДНОСТЬ
Рис.1.2 Классификация электромеханических
искателей.
Шаговый искатель типа ШИ-11 является коммутационным устройством, обеспечивающим коммутацию одного трехпроводного входа (q= 3) с любым из десяти трехпроводных выходов (m= 10). Так как контактное поле искателя занимает 1/3 окружности, то он имеет трехлучевые щетки, расположенные под углом 1200. Когда один луч щеток сходит с последней ламели, другой луч щеток вступает на первую ламель поля. Такое устройство щеток сокращает износ деталей и ускоряет процесс коммутации, так как устраняет холостой ход щеток. Из 12 положений ШИ- 11 одно является исходным и еще одно служит для остановки щеток при отсутствии свободных выходов. Искатель ШИ- 11 имеет четыре контактные щетки, установленные на роторе. Назначение проводов следующее:
- «а» и «b» – разговорные провода,
- «с» - провод пробы,
- провод «d» служит для возврата искателя в исходное положение.
Аналогично построен и искатель типа ШИ- 17. Различие заключается в емкости контактного поля и количестве лучей щеток. Искатель ШИ- 17 имеет проводность, равную 5. Назначение проводов «а», «b» и «с» тоже, что и в ШИ-11, провод «d» предназначен для предоставления автоматической междугородной связи абонентам, провод «l» служит для возврата искателя в исходное положение. Контактное поле искателя
ШИ- 17 обычно занимает 0, 5 окружности. В соответствии с этим искатель имеет двухлучевые щетки, отстоящие друг от друга на 1800. Шаговый искатель типа ШИ-17 обычно применяется для коммутации одного четырехпроходного входа с любым из 15 четырехпроходных, т.е. m= 15,
q= 4.
В искателе ШИ- 25 поле расположено на 0, 5 окружности и имеет емкость m= 25 линий. Может быть использовано 4 и 8 двух лучевых щеток, в зависимости от потребной проводности выходов по 27 ламелей, расположенных по дуге 1800. ШИ- 25 используется в АТС- 54А для подключения контрольно-испытательной аппаратуры.
Контактное поле ШИ- 50 имеет ту же конструкцию, что и поле ШИ- 25, но разделено на две подгруппы. Первая подгруппа образует выходы 1- 25, вторая 26- 50.
Расположение контактов и щеток шаговых искателей показано на рис. 1.3.
Контактное поле

Рис.1.3
Расположение контактов и щёток шаговых искателей
На рисунке 1.3.б показана схема контактного поля и щеток провода «а» шагового искателя ШИ- 50. Щетки «а1» и «а2» электрически соединены между собой и коммутируют входы с выходами в соответствующих контактных рядах. Для установления соединения входа с 1-25-м выходом используется щетка «а1», а с 26- 50 выходом - щетка «а2».
Условное обозначение шаговых искателей показано на
рис. 1.4.

Рис.1.4 Условное обозначение шаговых искателей,
а) развёрнутое и б) упрошённое
Широкое применение в системах связи нашли искатели с двумя движениями щеток, что позволило увеличить емкость контактного поля. К их числу относится декадно-шаговый искатель на 100 линий с подъемным и вращательным движением- ДШИ- 100.
Декадно-шаговый искатель ДШИ-100 имеет один вход и сто выходов. Составными частями ДШИ- 100 также является статор (контактное поле), ротор и движущий механизм (рис. 1.5.).
Контактное поле ДШИ- 100 состоит из трех секций: «а», «b», «с»
(рис. 1.5.). Для упрощения на рис. 1.5. показана лишь одна секция- секция «а», которая содержит 10 рядов контактных ламелей. В каждом ряду (декаде) имеется 10 ламелей, расположенных по дуге 800.
Следовательно, искатель, типа ДШИ- 100 представляет собой коммутационное устройство, соединяющее один трехпроводный вход с любым из ста трехпроводных выходов. Контактные ряды в поле отделяются друг от друга изоляционными прокладками. Искатель имеет три контактные щетки «а», «b», «с», установленные одна под другой в соответствии с секциями контактного поля. На оси щеток расположен храповой полуцилиндр ХП, скрепленный с зубчатой рейкой подъема ЗР, на которой укреплены щетки искателя (на рис. 1.5. показана одна из щеток- щетка «а»). Каждая щетка состоит из двух пружин, охватывающих контактную ламель с обеих сторон. Движущий механизм имеет два электромагнита: один для подъемного движения (ПЭ), а другой (ВЭ) для вращательного движения щеток. Оба электромагнита аналогичны по своей конструкции и отличаются лишь формой рычага рабочей собачки, действующей на ротор искателя.
Импульсы управления поступают вначале в обмотку подъемного электромагнита, а затем вращающего электромагнита. Рассмотрим принцип работы ДШИ (рис. 1.5.).
Для установки щеток искателя на любую из линий, включенных в контактное поле искателя, совершается два вида движений. При первом движении (подъемном), которое происходит поступательно вдоль вертикальной оси, выбирается контактный ряд (декада). Щетки при этом находятся вне поля. Второе движения (вращательное) происходит после окончания подъемного движения щеток, при этом щетки, описывая дугу в горизонтальной плоскости вокруг вертикальной оси, проходят по ламелям выбранной декады.
При поступлении импульса тока в электромагнит подъема (ЭМП) последний притягивает якорь и захватывает подъемной собачкой ПС зуб храповой рейки ЗП.
Щетки поднимаются на один шаг по вертикали. После окончания токовой посылки электромагнит подъема опускает якорь, который под действием возвратной пружины (П1) приходит в исходное положение. Подъемная собачка (ПС) попадает в следующий паз храповой рейки и захватывает очередной зуб для последующего подъемного движения. Обратному движению щеток препятствует стопорная собачка подъема СС (на рис. не показана). При каждом импульсе тока, щетки поднимаются на один шаг вверх. Из сказанного следует, что количество шагов при подъемном движении щеток искателя определяется числом импульсов, поступающих в обмотку подъемного электромагнита.
После окончания подъемного движения начинается вращательное движение щеток, для чего вводится в действие вращающий электромагнит. При поступлении импульса тока в обмотку электромагнита вращения движущая собачка вращения (ВС), укрепленная на рычаге якоря электромагнита, захватывает зуб храпового полуцилиндра и поворачивает щетки на один шаг. После окончания токовой посылки, в результате действия возвратной пружины (П2), якорь электромагнита вращения приходит в исходное положение, движущая собачка вращения западает в следующий паз храпового полуцилиндра и подготавливается к очередному перемещению щеток искателя. В дальнейшем при каждом новом притяжении вращающего электромагнита щетки искателя перемещаются по ламелям выбранной декады на число шагов, соответствующих количеству поступивших импульсов в обмотку вращающего электромагнита (ВЭ). Обратному вращательному движению щеток препятствует стопорная собачка вращательного движения (на рис. не показана).

Рис.1.5 Упрощенная электромеханическая схема
декадно-шагового искателя.
а) секция ламеля б)
схема расположения
ПЭ-
электромагнит подъема, Щ-
щетка,
ВЭ-
электромагнит вращения, Р-
ротор,
ПС-
собачка подъема, ЗР-
зубчатая рейка,
ВС-
собачка вращения,
ХП-
храповой полуцилиндр,
Таким образом, если сначала послать определенное число импульсов в обмотку подъемного электромагнита, то щетки совершат подъемное движение и остановятся против декады, соответствующей числу поступивших импульсов. Если затем направить импульсы во вращающий электромагнит, то щетки совершат вращательное движение, сделав в пределах декады столько шагов, сколько импульсов будет послано. В соответствии с этим ламели поля нумеруются так, как это показано на
рис. 1.6., причем цифра 0 соответствует десяти импульсам. На рис. 1.5. щетка «а» установлена на пятой ламели третьей декады, что соответствует трем импульсам, поступившим в обмотку подъемного электромагнита, и пяти импульсам – в обмотку вращающего электромагнита. Аналогичные положения в своих секциях будут занимать щетки «b» и «с», так как все они закреплены на одной оси и движутся одновременно.
После окончания соединения щетки должны быть возвращены в исходное положение. Для этого в обмотку вращающегося электромагнита подаются дополнительные импульсы от станционного импульсника, вследствие чего возобновляется вращательное движение щеток, которые выйдя за пределы поля под действием силы тяжести и сжатой пружины попадают вниз до исходного уровня. Далее род действием спиральной пружины возврата (ВП) щетки возвращаются в исходное положение.
(на рис. не показана).
Таким образом, при каждом
цикле действия искателя его щетки описывают четырёхугольник. Траектория
движения щеток при их возвращении в исходное положение показана пунктирной
линией (рис.1.6.б). Параметры ДШИ –100 -
ёмкость контактного поля (m = 100) и проводность каждой
точки коммутации (q = 3), количество входов у любого искателя равно единице.
Для улучшения эксплутационных характеристик и повышения надёжности разработан
модернизированный искатель ДШИ-
2. СОЕДИНИТЕЛИ
В коммутационных системах второго поколения (АТСК, КЭАТС, ЭАТС) основным коммутационным прибором является соединитель. В соединителях отсутствуют такие недостатки искателей как: контакт скольжения; (щетка-ламель); низкая скорость соединения; низкая надежность работы; сложность конструкции; низкое качество контакта.
Точка коммутации в соединителях определяется двумя координатами – по горизонтали и по вертикали. Соединитель может иметь n входов и m выходов (n и m определяются типом коммутационной системы). Один и тот же соединитель для коммутации может использоваться многократно. При этом поочередно могут быть установлены соединения во всех вертикалях. Отсюда и название – многократный координатный соединитель – МКС. В одно и то же время в поле МКС может иметь место столько соединений, сколько вертикалей содержит МКС.
В зависимости от типа коммутационного элемента, применяемого в соединителях они бывают: электромеханические, герконовые, ферридовые, интегральные, электронные.

Рис.1.6 Контактное поде ДШИ
а) нумерация поля;
б) диаграмма
движения щеток ДШИ;
в) условное обозначение ДШИ
2.1. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СОЕДИНИТЕЛИ
Многократный координатный соединитель (МКС) является основным коммутационным прибором АТС координатной системы.
В состав МКС входят следующие конструктивные элементы
(рис.2.1, 2.2):
- вертикали (вертикальные блоки);
- выбирающее устройство, состоящее из выбирающих электромагнитов (ВЭ) и выбирающих реек;
- рама, в которой установлено 10 или 20 вертикалей, 10 или 12 выбирающих электромагнитов и 5 или 6 выбирающих реек.
На рис.2.1 упрощенно показан общий вид МКС, имеющий 20 вертикальных блоков (вертикалей), 10 выбирающих электромагнитов, объединенных попарно пятью выбирающими рейками.
На рис.2.2 показан эскиз того же МКС типа 20х10х6. МКС имеет 20 вертикалей. Каждая вертикаль содержит удерживающий электромагнит УЭ и контактную систему, состоящую из неподвижных струн и подвижных контактных пружин по числу коммутируемых проводов.
Количество выбирающих электромагнитов МКС соответствует числу горизонтальных контактных рядов вертикали.
Якоря каждых двух соседних выбирающих электромагнитов жестко связаны с одной горизонтальной выбирающей рейкой. Таким образом, число выбирающих реек МКС вдвое меньше числа выбирающих электромагнитов (ВМ).
В пределах каждой вертикали в одно и то же время вход вертикали может быть соединен только с одним выходом. При этом поочерёдно могут быть установлены соединения во всех вертикалях. Отсюда и название – многократный соединитель. В одно и то же время в поле МКС может быть установлено столько соединений, сколько вертикалей содержит МКС.
МКС, применяемые для построения коммутационных блоков в отечественных системах АТСК, имеют унифицированную конструкцию.
Для всех унифицированных МКС используется рама размером 630х213 мм. МКС выпускаются следующих типов: 20 х 10 х 6, 10 х 10 х 12, и их модификации 20 х 20 х 3, 10 х 20 х 6 (первая цифра означает число вертикальных блоков, вторая ёмкость вертикали, третья проводность вертикали).

1-вертикали; 2-выбирающее устройство; 3- рама
Рис.2.1 Общий вид МКС 20Х10Х6
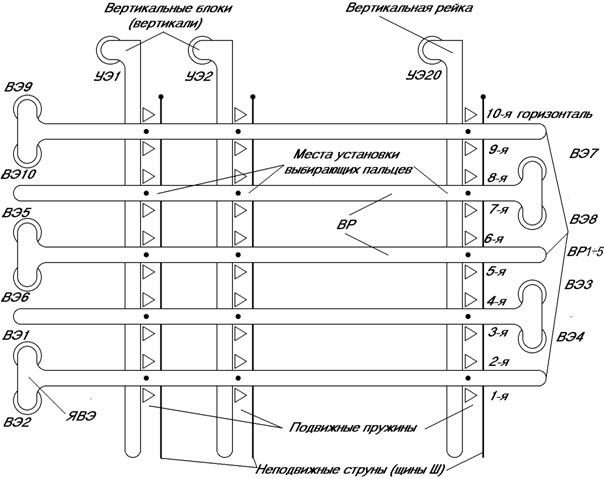
Рис.2.2 Многократный координатный соединитель МКС с 20 вертикальными блоками по 10 линий в каждом
(показана однопроводная коммутация)

Рис.2.3 Элементы конструкции МКС
УР - удерживающая рейка УЭ
- удерживающий электромагнит
ВР -
выбирающие рейки ЯВР
- якорь выбирающей рейки
ВП - выбирающие пальцы ВЭ - выбирающий электромагнит
Принцип действия МКС поясним по рис.2.3.
В исходном положении выбирающий палец ВП находиться в нейтрально положении. При срабатывании одного из двух выбирающих электромагнитов, управляющих одной выбирающей рейкой, последняя поворачивается на небольшой угол. При этом выбирающий палец попадает в вырезы гетинаксовых толкателей – верхнего, если срабатывает нижний выбирающий электромагнит (из пары ВМ управляющих одной выбирающей рейкой), или нижнего, если срабатывает верхний выбирающий электромагнит. При срабатывании удерживающего электромагнита, удерживающая рейка (УР) двигаясь к толкателю (Т), встречает на своем пути выбирающий палец (ВП), давит на него, и через него воздействует на толкатель (который находиться на пути движения выбирающего пальца). Толкатель при этом освобождает подвижные контакты пружины (рис.2.2.), которые соединяются (под действием собственного натяжения) с неподвижными струнами. После срабатывания удерживающего электромагнита УЭ, выбирающий палец оказывается зажатым между толкателем и удерживающей рейкой в точке коммутации.
При выключении выбирающего электромагнита ВМ, выбирающая рейка займет нейтральное положение, а зажатый палец изогнется и контактная группа останется включенной до тех пор, пока находится под током удерживающий электромагнит.
После окончания соединения удерживающий электромагнит выключается, под действием возвратных пружин якорь удерживающего электромагнита, удерживающая рейка, толкатель и контактные пружины возвращаются в исходное положение. Выбирающий палец также освобождается.
Таким образом, для соединения входа с выходом необходима следующая очёредность работы элементов МКС: выбирающий электромагнит, выбирающая рейка, выбирающий палец, удерживающая рейка, контактные пружины.
УДВОЕНИЕ ЁМКОСТИ ВЕРТИКАЛИ МКС
Во многих случаях оказывается целесообразным увеличивать число выходов вертикали, например, вдвое.
Удвоение ёмкости вертикали можно достигнуть, применяя так называемый трёхпозиционный МКС. На рис.2.4. показан способ удвоения ёмкости вертикали в шестипроводном МКС.
Каждая вертикал в таком МКС имеет два ряда дополнительных ряда контактных пружин (вместо 10 рядов - 12) и одну дополнительную выбирающую рейку (вместо 5 реек - 6) (рис.2.4.б.). Вход вертикали (3 - проводный) подключается не к неподвижным контактным струнам, как в 2-х позиционных МКС, а к подвижным контактным пружинам двух дополнительных рядов, контактные пружины 2, 4, 6 в 11 ряду и 1, 3, 5 в 12 ряду не устанавливаются.
К каждому ряду контактов 1- 10 подключается по два выхода: один к пружинам 1, 3, 5 и второй к пружинам 2, 4, 6. Таким образом, всего к вертикали подключается 20 выходов. При етом естественно, проводность выходов сокращается в двое – вместо шести проводов каждый выход будет иметь три провода.
Выбор одной из двух линий в данном случае осуществляется с помощью двух дополнительных выбирающих электромагнитов, называемых переключающими ПЭ1 (В11) и ПЭ2 (В12). Такой МКС называют трехпозиционным, т. к. для выбора нужной точки коммутации должны сработать три электромагнита – переключающий, выбирающий, удерживающий.
Например: чтобы подключить 1 вход к 15 выходу, должен сработать 12-й и 5-й выбирающие электромагниты, после чего первый удерживающий электромагнит.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Рис.2.4 Схема вертикалей МКС:
а) двухпозиционного б) трёхпозиционного
К трехпозиционным МКС отечественного производства относятся такие как МКС – 10 х 20 х 6, МКС – 20 х 30 х 3. Таким образом, трехпозиционный МКС вдвое увеличивает число выходов, но зато вдвое уменьшает проводность. Например, трехпозиционный МКС, выполненный на двухпозиционном МКС – 10 х 10 х 12, имеет параметры 10 х 20 х 6.
КОММУТАЦИОННЫЕ ПАРАМЕТРЫ МКС
К коммутационным параметрам МКС относятся:
1. Число вертикалей – 10, 20
2. Ёмкость вертикали – 10, 20
3. Проводность коммутируемых точек – 12, 6, 3.
Для построения на МКС их коммутационных блоков, необходимо знать коммутационные параметры.
Основные параметры МКС
Таблица 1
|
Тип МКС |
Число верти- калей |
Ёмкость верти- калей |
Про-вод-ность |
Кол-во Электро- Магнитов |
Число выбира-ющих реек |
Число
кон- тактов в группе |
|
|
УЭ
|
ВЭ |
||||||
|
10Х10Х12 |
10 |
10 |
12 |
10 |
10 |
5 |
12 |
|
10Х20Х6 |
10 |
20 |
6 |
10 |
12 |
6 |
12 |
|
20Х10Х6 |
20 |
10 |
6 |
20 |
10 |
5 |
6 |
|
20Х20Х3 |
20 |
20 |
3 |
20 |
12 |
6 |
6 |
Условно
вертикаль обозначается следующим образом

а) координатный способ
изображения. Вертикаль изображается толстой прямой линией с кружком, а вход
вертикали – черточками.
б) символический способ изображения. Вертикаль изображается кружком с чёрточкой (чёрточка должна быть направлена в сторону выходов вертикали, а выходы вертикали - кружками без чёрточек.)
2.2. МНОГОКРАТНЫЙ ГЕРКОНОВЫЙ СОЕДИНИТЕЛЬ (МГС)
Многократный герконовый соединитель (МСГ) представляет собой совокупность герконовых реле, размещенных в n горизонтальных и m вертикальных рядах на общей плате. При этом контакты реле, расположенные по горизонтали, запараллелены и образуют один вход, а те же контакты реле, запараллеленные по вертикали образуют один выход. Такая плата называется коммутационной матрицей на n входов и m выходов (n x m). Матрица представляет собой полнодоступную однозвенную схему коммутации, в которую каждому входу доступен любой выход.

Рис.2.5 Схема двухпроводной герконовой матрицы 8 Х 8
(разговорные провода)
Как показано на рис.2.5, герконы в коммутационной матрице должны соединяться так, чтобы получился коммутатор с определенным числом входов и выходов. В квазиэлектронных АТС с программным управлением управляющее устройство функционирует по принципу двоичной системы счисления, поэтому для построения коммутационных полей удобно применять коммутационные матрицы ёмкостью кратной по входам и выходам 2k (k = 1, 2, 3 …) например, 4 х 4, 4 х 8, 8 х 8.
Схема коммутации двухпроводного разговорного тракта герконового соединителя с параметрами n = 8 и m = 8 представлена на рис.2.5. Для соединения, например, входа 1 с выходом 8 необходимо обеспечить включение герконового реле ГР 1.8 в точке коммутации, характеризуемой координатами входа и выхода.
Для построения МГС могут использоваться герконовые реле как с двумя, так и с одной обмоткой управления. Схема соединения двухобмоточных реле в МГС представлена на рис.2.6.
Для обеспечения срабатывания требуемого реле необходимо пропустить ток через его первую обмотку. Так, для срабатывания герконового реле ГР –1.8 необходимо подать импульс тока положительной полярности на горизонтальный провод “c” выхода 8. При срабатывании реле ГР 1.8 через его герконы (рис.2.6.а) образуется соединение между входом 1 и выходом 8. Реле ГР 1.8 удерживается за счет протекания тока по второй обмотке через собственный контакт по проводу “d”. Диоды в цепях первых обмоток герконовых реле необходимы для развязки электрических цепей срабатывания.

Рис.2.6 Включение двух обмоточного герконового реле
в схеме
МГС- 8 Х 8
а) МГС – 8 Х 8 (провода «с» и «d»);
б) точка коммутации МГС – 8 Х 8
При построении коммутационной системы (КС) с электрическим удержанием имеет место значительный расход электроэнергии, поскольку при каждом соединении в рабочем состоянии находятся обмотки удерживания реле на каждом из звеньев коммутации. С целью уменьшения расхода электроэнергии для удержания соединительного тракта в КС используются герконовые реле с магнитной блокировкой.
2.3. МНОГОКРАТНЫЙ ФЕРРИДОВЫЙ СОЕДИНИТЕЛЬ
(МФС)
Многократный ферридовый соединитель МФС является разновидностью соединителей, построенный на ферридах (герконах с магнитным удержанием). МФС устроен так же как и МГС в виде матрицы, но в каждой точке коммутации имеется феррид с соответствующими числом контактов (герконов). Схема включения обмоток ферридов для МФС приведена на рис.2.7.
При построении соединителя используется дифференциальная схема включении полуобмоток феррида, при этом первые обмотки одной вертикали соединяются последовательно, вторые обмотки одной горизонтали также соединяются последовательно.
Для коммутации точки ток подается на ту горизонталь и вертикаль, на пересечении которых она находится.
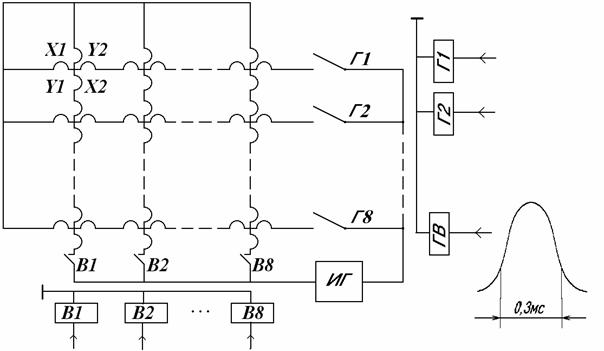
Рис.2.7 Схема включения обмоток ферридов в МФС
Замыкание контактов в точке коммутации
осуществляется одновременным прохождением импульса тока от импульсного
генератора (ИГ) через соответствующие горизонталь и вертикаль, что
обеспечивается предварительным замыканием одного из контактов управляющих реле
горизонталей Г1 + Г8 и вертикалей В1 + В8, при этом ферридовый сердечник в
точке пересечения перейдет в состояние “
Для управления работой феррида требуются импульсы тока большой величины (до 10 А), однако длительность импульсов составляет всего
0,1 – 0,5 мс и определяется только временем перемагничивания магнитной системы. После прекращения управляющего импульса, контактные пружины герконов остаются в рабочем состоянии под действием остаточной магнитной индукции ферритового сердечника.
Параметры МФС определяются числом входов, выходов и проводности точки коммутации (таблица 2.1.).
Параметры некоторых МКС
Таблица 2.1.
|
Тип МФС |
Наименование |
Параметры |
|
МФС 1 |
2-х проводный, 8 х 8 |
8 х 8 х 2 |
|
МФС 2 |
4-х проводный, 8 х 8 |
8 х 8 х 4 |
|
МФС 3 |
Смешанная 2-х и 4-х проводная коммутация выходов |
(4+4) х 8 х (2,4) |
|
МФС 4 |
Смешанная 2-х и 4-х проводная коммутация выходов |
8 х (4+4) х (4,2) |
2.4. МНОГОКРАТНЫЙ ИНТЕГРАЛЬНЫЙ СОЕДИНИТЕЛЬ (МИС)
Многократный интегральный соединитель МИС является разновидностью герконовых матриц с магнитным удержанием.
Действие МИС основано на способе безгистерезисного намагничивания магнитной системы точки коммутации. Магнитная система сердечника состоит из полутвердого магнитного материала. Принцип действия МИС показан на рис.2.8.
Точка коммутации состоит из двух герконов и полутвердого магнита с управляющими обмотками X и Y. Обмотки Y, намотанные отдельно на каждый магнит, соединяются последовательно в каждом вертикальном ряду и выводятся на управляющие входы Y1, Y2, Yn. Управляющие обмотки Х являются общими для всех точек коммутации, расположенных в одном горизонтальном ряду и образуют управляющие входы Х1….Хm. Таким образом, обмотки Х и Y являются обще координатными – интегральными.
Для срабатывания контактов в точке коммутации в соответствующую обмотку Х подаются знакопеременные затухающие импульсы тока (длительность импульса tn = 200 мкс, с максимальной амплитудой 3,5–5 А), а в обмотку Y- прямоугольные импульсы тока с амплитудой 1, 1–1, 2 А.
При этом импульс постоянного тока Y перекрывает по времени серию импульсов Х.
При сложении магнитных полей, создаваемых управляющими токами, полутвердый магнит намагничивается согласно безгистерезисной кривой и магнитоуправляемые контакты замыкаются.
Процесс циклического безгистерезисного
намагничивания системы представлен на рис.2.9.

Рис.2.8 Принцип действия МИС

Рис.2.9 Процесс циклического без гистерезисного намагничивания – размагничивания
Отдельно действующий магнитный поток обмотки Y переводит магнитную систему
из состояния “
Длительность первых намагничивающих импульсов слишком мала, чтобы вызвать замыкание герконов в точках 3 и 4 состояния магнитной системы, соответствующих моментам времени t3 и t4 (рис.2.9.а.).
При одновременном воздействии магнитных потоков Х + Y импульс постоянного тока Y перекрывает по времени серию импульсов Х. При этом магнитная система, достигнув состояния насыщения 7 в первый раз по кривой первоначального намагничивания, останется в устойчивом состоянии 10. В результате герконы замыкаются и остаются в замкнутом состоянии при затухании магнитных потоков Х и Y.
Размагничивание магнитной системы из рабочей точки 10 происходит при воздействии серии знакопеременных затухающих импульсов тока обмотки Х в соответствии с кривой рис.2.9.б. При этом герконы размыкаются.
Конструкция МИС приведена на рис.2.10 на примере двухпроводной матрицы 3 х 3.
В каждой точке коммутации устанавливаются магниты 1, магнитопровод (магнитная пластина) 4, в которой помещаются герконы 5. На герконы надето короткозамкнутое кольцо 6 из материала с высокой электропроводностью (для замедления времени срабатывания). Магниты из полутвердого магнитного материала охвачены управляющими обмотками 2 (обмотка Y) и 3 (обмотка Х).
Конструктивно соединитель состоит их двух раздельных печатных плат – герконов и магнитной системы с управляющими обмотками. При сборе обе платы крепятся таким образом, чтобы герконы входили в магнитопроводы платы магнитной системы.
Соединители, предназначены для коммутации аналоговых и цифровых сигналов, выпускаются в виде двух модификаций: МИС 10 – четырехпроводный, емкостью 4 х 4 и МИС – 11 – двухпроводной, ёмкостью 4 х 8.
![]()
![]()
![]()
Xn

Рис.2.10 Многократный
интегральный соединитель МИС
а) конструкция;
б) кривая
намагничивания
1 -
магниты,
2,3 - управляющие обмотки,
4 -
магниты из полутвёрдого магнитного
материала находятся под воздействием обмоток управления Х и Y,
5
- герконы,
6
- короткозамкнутое кольцо
2.5. МНОГОКРАТНЫЕ ЭЛЕКТРОННЫЕ СОЕДИНИТЕЛИ (МЭС)
В электронных АТС для построения коммутационного поля используют многократные электронные соединители, обладающие высоким быстродействием, малым потреблением электроэнергии и малыми габаритами. Каждая точка коммутации соединителя содержит электронный контакт.
В качестве электронного контакта могут использоваться кремневые диоды и транзисторы, динисторы, тринисторы.
На рис.2.11. показан принцип построения электронного соединителя на транзисторах с параметрами 4 х 4.
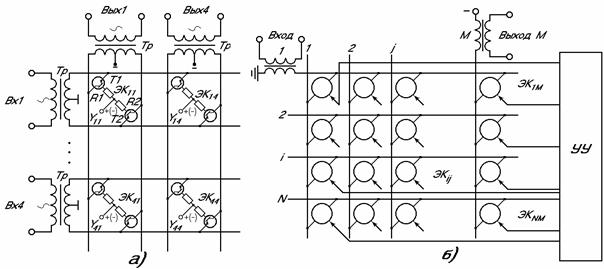
Рис.2.11. Многократный электронный соединитель МЭС:
а) принципиальная схема;
б) функциональная схема
ЭК – электронный контакт
Методические указания к лабораторной работе
Изучение конструкции и принципа работы
искателей и соединителей
по дисциплине
Учебная практика
для студентов направления образования
5522300 - Телекоммуникация
Рекомендована к переизданию в типографии ТУИТ Протокол заседания кафедры ТС и СК №4 от 29.09.03 г.
Автор переиздания: Кан А. В.
Гультураев Н.Х.
Демурин В.К.
Тверитина О.О.
Ответственный редактор: Сон В. М.
Корректор: Павлова С.И.
Отпечатано в типографии ТУИТ
Заказ
г. Ташкент, ул. А. Тимура, 108.